Video and Motion Analysis Computer Vision Carnegie Mellon University (Kris Kitani)
|
|
|
- Walter Cain
- 5 years ago
- Views:
Transcription
1 Video and Motion Analysis Computer Vision Carnegie Mellon University (Kris Kitani)

2 Optical flow used for feature tracking on a drone

3 Interpolated optical flow used for super slow-mo
4 optical flow used for motion estimation in visual odometry
5 Roadmap (Where we have been and where we are going)



6 Image filtering Frequency domain image pyramids Image gradients Boundaries Hough Transform Image Manipulation (January)


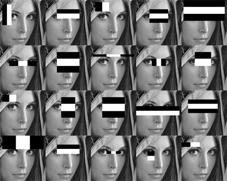

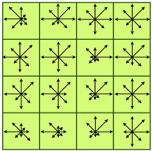
7 Corner detection Multi-scale detection Haar-like HOG SURF SIFT Image Features (February)

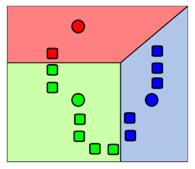
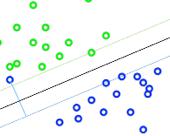

8 Bag-of-words K-means Nearest Neighbor Naive Bayes SVM Object Recognition (February)


9 2D Transforms DLT RANSAC 2D Alignment (March)


10 x = PX P X camera matrix pose estimation triangulation F fundamental matrix epipolar geometry Reconstruction 2 view geometry (March)


11 Block matching Energy minimization Stereo (March)
12 What you can do now Detect lines (circles, shapes) in an image Recognize objects using a bag-of-words model Automatic image warping and basic AR Reconstruct 3D scene structure from two images
13 What you will learn next Object tracking in video
14 2 6 4 I x (p 1 ) I y (p 1 ) I x (p 2 ) I y (p 2 ).. I x (p 25 ) I y (p 25 ) apple u v = I t (p 1 ) I t (p 2 ). I t (p 25 ) min u, v X ij E d (i, j)+ E s (i, j) Constant Flow Horn Schunck Optical Flow (April)
 Baker")
 Image")
15 Lucas Kanade (Forward additive) Baker Matthews (Inverse Compositional) Image Alignment (April)



16 KLT Mean shift Kalman Filtering SLAM Tracking in Video (April-May)
17 Brightness Constancy Computer Vision Carnegie Mellon University (Kris Kitani)
18 Optical Flow Problem Definition Given two consecutive image frames, estimate the motion of each pixel Assumptions Brightness constancy Small motion
19 Assumption 1 Brightness constancy Scene point moving through image sequence (x(2),y(2)) (x(k),y(k)) (x(1),y(1))
20 Assumption 1 Brightness constancy Scene point moving through image sequence (x(2),y(2)) (x(k),y(k)) (x(1),y(1)) I(x, y, 1) I(x, y, 2) I(x, y, k)
21 Assumption 1 Brightness constancy Scene point moving through image sequence (x(2),y(2)) (x(k),y(k)) (x(1),y(1)) I(x, y, 1) I(x, y, 2) I(x, y, k) Assumption:Brightness of the point will remain the same
22 Assumption 1 Brightness constancy Scene point moving through image sequence (x(2),y(2)) (x(k),y(k)) (x(1),y(1)) I(x, y, 1) I(x, y, 2) I(x, y, k) Assumption:Brightness of the point will remain the same I(x(t),y(t),t)=C constant
23 Assumption 2 Small motion I(x, y, t) I(x, y, t + t)
24 Assumption 2 Small motion (x + u t, y + v t) (x, y) I(x, y, t) (x, y) I(x, y, t + t)
25 Assumption 2 Small motion (x + u t, y + v t) (x, y) I(x, y, t) (x, y) I(x, y, t + t) Optical flow (velocities): (u, v) Displacement: ( x, y) =(u t, v t)
26 Assumption 2 Small motion (x + u t, y + v t) (x, y) I(x, y, t) (x, y) I(x, y, t + t) Optical flow (velocities): (u, v) Displacement: ( x, y) =(u t, v t) For a really small space-time step I(x + u t, y + v t, t + t) =I(x, y, t) the brightness between two consecutive image frames is the same
27 These assumptions yield the Brightness Constancy Equation di dx dy =0 total derivative partial derivative Where does this come from?
28 I(x + u t, y + v t, t + t) =I(x, y, t) For small space-time step, brightness of a point is the same If the time step is really small, we can linearize the intensity function
29 I(x + u t, y + v t, t + t) =I(x, y, t) Multivariable Taylor Series Expansion (First order approximation, two variables) f(x, y) f(a, b)+f x (a, b)(x a) f y (a, b)(y b)
30 I(x + u t, y + v t, t + t) =I(x, y, t) Multivariable Taylor Series Expansion (First order approximation, two variables) f(x, y) f(a, b)+f x (a, b)(x a) f y (a, b)(y b) I(x, t = I(x, y, t) assuming small motion
31 I(x + u t, y + v t, t + t) =I(x, y, t) Multivariable Taylor Series Expansion (First order approximation, two variables) f(x, y) f(a, b)+f x (a, b)(x a) f y (a, b)(y b) I(x, t = I(x, y, t) assuming small motion cancel terms
32 I(x + u t, y + v t, t + t) =I(x, y, t) Multivariable Taylor Series Expansion (First order approximation, two variables) f(x, y) f(a, b)+f x (a, b)(x a) f y (a, b)(y b) I(x, t = I(x, y, t) assuming t =0 cancel terms
33 I(x + u t, y + v t, t + t) =I(x, y, t) Multivariable Taylor Series Expansion (First order approximation, two variables) f(x, y) f(a, b)+f x (a, b)(x a) f y (a, b)(y b) I(x, t = I(x, y, t) assuming t =0 divide by take limit t t! 0
34 I(x + u t, y + v t, t + t) =I(x, y, t) Multivariable Taylor Series Expansion (First order approximation, two variables) f(x, y) f(a, b)+f x (a, b)(x a) f y (a, b)(y b) I(x, t = I(x, y, t) assuming t =0 divide by take limit t dx dy =0
35 I(x + u t, y + v t, t + t) =I(x, y, t) Multivariable Taylor Series Expansion (First order approximation, two variables) f(x, y) f(a, b)+f x (a, b)(x a) f y (a, b)(y b) I(x, t = I(x, y, t) assuming t =0 divide by take limit t dx dy =0 Brightness Constancy Equation
36 dx dy =0 Brightness Constancy Equation I x u + I y v + I t =0 shorthand notation (displacement) ri > v + I t =0 vector form
37 (putting the math aside for a second ) What do the term of the brightness constancy equation represent?! I x u + I y v + I t =0
38 (putting the math aside for a second ) What do the term of the brightness constancy equation represent?! I x u + I y v + I t =0 Image gradients
39 (putting the math aside for a second ) What do the term of the brightness constancy equation represent?! flow velocities I x u + I y v + I t =0 Image gradients
40 (putting the math aside for a second ) What do the term of the brightness constancy equation represent?! flow velocities I x u + I y v + I t =0 Image gradients temporal gradient How do you compute these terms?
41 I x u + I y v + I t =0 How do you compute I I spatial derivative
42 I x u + I y v + I t =0 How do you compute I I spatial derivative Forward difference Sobel filter Scharr filter
43 I x u + I y v + I t =0 How do you compute I I I spatial derivative temporal derivative Forward difference Sobel filter Scharr filter
44 I x u + I y v + I t =0 How do you compute I I I spatial derivative temporal derivative Forward difference Sobel filter Scharr filter frame differencing
45 Frame differencing t t +1 I = (example of a forward difference)
46 Example: t t +1 x x x 3 patch y y I x I x I x y y y
47 I x u + I y v + I t =0 How do you compute I I spatial derivative u = dx v = dy dt dt optical flow I temporal derivative Forward difference Sobel filter Scharr filter How do you compute this? frame differencing
48 I x u + I y v + I t =0 How do you compute I I spatial derivative u = dx v = dy dt dt optical flow I temporal derivative Forward difference Sobel filter Scharr filter We need to solve for this!! (this is the unknown in the optical flow problem) frame differencing
49 I x u + I y v + I t =0 How do you compute I I spatial derivative u = dx v = dy dt dt optical flow I temporal derivative Forward difference Sobel filter Scharr filter (u, v) Solution lies on a line Cannot be found uniquely with a single constraint frame differencing
50 I x u + I y v + I t =0 I I y u = dx v = dy t dt spatial derivative optical flow temporal derivative How can we use the brightness constancy equation to estimate the optical flow?
51 unknown I x u + I y v + I t =0 known We need at least equations to solve for 2 unknowns.
52 unknown I x u + I y v + I t =0 known Where do we get more equations (constraints)?
Lucas-Kanade Optical Flow. Computer Vision Carnegie Mellon University (Kris Kitani)
") Lucas-Kanade Optical Flow Computer Vision 16-385 Carnegie Mellon University (Kris Kitani) I x u + I y v + I t =0 I x = @I @x I y = @I u = dx v = dy I @y t = @I dt dt @t spatial derivative optical flow
Lucas-Kanade Optical Flow Computer Vision 16-385 Carnegie Mellon University (Kris Kitani) I x u + I y v + I t =0 I x = @I @x I y = @I u = dx v = dy I @y t = @I dt dt @t spatial derivative optical flow
Motion Estimation (I) Ce Liu Microsoft Research New England
 Ce Liu Microsoft Research New England") Motion Estimation (I) Ce Liu celiu@microsoft.com Microsoft Research New England We live in a moving world Perceiving, understanding and predicting motion is an important part of our daily lives Motion
Motion Estimation (I) Ce Liu celiu@microsoft.com Microsoft Research New England We live in a moving world Perceiving, understanding and predicting motion is an important part of our daily lives Motion
Elaborazione delle Immagini Informazione multimediale - Immagini. Raffaella Lanzarotti
 Elaborazione delle Immagini Informazione multimediale - Immagini Raffaella Lanzarotti OPTICAL FLOW Thanks to prof. Mubarak Shah,UCF 2 Video Video: sequence of frames (images) catch in the time Data: function
Elaborazione delle Immagini Informazione multimediale - Immagini Raffaella Lanzarotti OPTICAL FLOW Thanks to prof. Mubarak Shah,UCF 2 Video Video: sequence of frames (images) catch in the time Data: function
CS4495/6495 Introduction to Computer Vision. 6B-L1 Dense flow: Brightness constraint
 CS4495/6495 Introduction to Computer Vision 6B-L1 Dense flow: Brightness constraint Motion estimation techniques Feature-based methods Direct, dense methods Motion estimation techniques Direct, dense methods
CS4495/6495 Introduction to Computer Vision 6B-L1 Dense flow: Brightness constraint Motion estimation techniques Feature-based methods Direct, dense methods Motion estimation techniques Direct, dense methods
Image Alignment Computer Vision (Kris Kitani) Carnegie Mellon University
 Carnegie Mellon University") Lucas Kanade Image Alignment 16-385 Comuter Vision (Kris Kitani) Carnegie Mellon University htt://www.humansensing.cs.cmu.edu/intraface/ How can I find in the image? Idea #1: Temlate Matching Slow, combinatory,
Lucas Kanade Image Alignment 16-385 Comuter Vision (Kris Kitani) Carnegie Mellon University htt://www.humansensing.cs.cmu.edu/intraface/ How can I find in the image? Idea #1: Temlate Matching Slow, combinatory,
Motion Estimation (I)
") Motion Estimation (I) Ce Liu celiu@microsoft.com Microsoft Research New England We live in a moving world Perceiving, understanding and predicting motion is an important part of our daily lives Motion
Motion Estimation (I) Ce Liu celiu@microsoft.com Microsoft Research New England We live in a moving world Perceiving, understanding and predicting motion is an important part of our daily lives Motion
CSCI 250: Intro to Robotics. Spring Term 2017 Prof. Levy. Computer Vision: A Brief Survey
 CSCI 25: Intro to Robotics Spring Term 27 Prof. Levy Computer Vision: A Brief Survey What Is Computer Vision? Higher-order tasks Face recognition Object recognition (Deep Learning) What Is Computer Vision?
CSCI 25: Intro to Robotics Spring Term 27 Prof. Levy Computer Vision: A Brief Survey What Is Computer Vision? Higher-order tasks Face recognition Object recognition (Deep Learning) What Is Computer Vision?
Computer Vision I. Announcements
 Announcements Motion II No class Wednesda (Happ Thanksgiving) HW4 will be due Frida 1/8 Comment on Non-maximal supression CSE5A Lecture 15 Shi-Tomasi Corner Detector Filter image with a Gaussian. Compute
Announcements Motion II No class Wednesda (Happ Thanksgiving) HW4 will be due Frida 1/8 Comment on Non-maximal supression CSE5A Lecture 15 Shi-Tomasi Corner Detector Filter image with a Gaussian. Compute
Mean-Shift Tracker Computer Vision (Kris Kitani) Carnegie Mellon University
 Carnegie Mellon University") Mean-Shift Tracker 16-385 Computer Vision (Kris Kitani) Carnegie Mellon University Mean Shift Algorithm A mode seeking algorithm Fukunaga & Hostetler (1975) Mean Shift Algorithm A mode seeking algorithm
Mean-Shift Tracker 16-385 Computer Vision (Kris Kitani) Carnegie Mellon University Mean Shift Algorithm A mode seeking algorithm Fukunaga & Hostetler (1975) Mean Shift Algorithm A mode seeking algorithm
Introduction to motion correspondence
 Introduction to motion correspondence 1 IPAM - UCLA July 24, 2013 Iasonas Kokkinos Center for Visual Computing Ecole Centrale Paris / INRIA Saclay Why estimate visual motion? 2 Tracking Segmentation Structure
Introduction to motion correspondence 1 IPAM - UCLA July 24, 2013 Iasonas Kokkinos Center for Visual Computing Ecole Centrale Paris / INRIA Saclay Why estimate visual motion? 2 Tracking Segmentation Structure
Motion estimation. Digital Visual Effects Yung-Yu Chuang. with slides by Michael Black and P. Anandan
 Motion estimation Digital Visual Effects Yung-Yu Chuang with slides b Michael Black and P. Anandan Motion estimation Parametric motion image alignment Tracking Optical flow Parametric motion direct method
Motion estimation Digital Visual Effects Yung-Yu Chuang with slides b Michael Black and P. Anandan Motion estimation Parametric motion image alignment Tracking Optical flow Parametric motion direct method
Scale & Affine Invariant Interest Point Detectors
 Scale & Affine Invariant Interest Point Detectors Krystian Mikolajczyk and Cordelia Schmid Presented by Hunter Brown & Gaurav Pandey, February 19, 2009 Roadmap: Motivation Scale Invariant Detector Affine
Scale & Affine Invariant Interest Point Detectors Krystian Mikolajczyk and Cordelia Schmid Presented by Hunter Brown & Gaurav Pandey, February 19, 2009 Roadmap: Motivation Scale Invariant Detector Affine
Edges and Scale. Image Features. Detecting edges. Origin of Edges. Solution: smooth first. Effects of noise
 Edges and Scale Image Features From Sandlot Science Slides revised from S. Seitz, R. Szeliski, S. Lazebnik, etc. Origin of Edges surface normal discontinuity depth discontinuity surface color discontinuity
Edges and Scale Image Features From Sandlot Science Slides revised from S. Seitz, R. Szeliski, S. Lazebnik, etc. Origin of Edges surface normal discontinuity depth discontinuity surface color discontinuity
CS 3710: Visual Recognition Describing Images with Features. Adriana Kovashka Department of Computer Science January 8, 2015
 CS 3710: Visual Recognition Describing Images with Features Adriana Kovashka Department of Computer Science January 8, 2015 Plan for Today Presentation assignments + schedule changes Image filtering Feature
CS 3710: Visual Recognition Describing Images with Features Adriana Kovashka Department of Computer Science January 8, 2015 Plan for Today Presentation assignments + schedule changes Image filtering Feature
Feature extraction: Corners and blobs
 Feature extraction: Corners and blobs Review: Linear filtering and edge detection Name two different kinds of image noise Name a non-linear smoothing filter What advantages does median filtering have over
Feature extraction: Corners and blobs Review: Linear filtering and edge detection Name two different kinds of image noise Name a non-linear smoothing filter What advantages does median filtering have over
Kalman Filter Computer Vision (Kris Kitani) Carnegie Mellon University
 Carnegie Mellon University") Kalman Filter 16-385 Computer Vision (Kris Kitani) Carnegie Mellon University Examples up to now have been discrete (binary) random variables Kalman filtering can be seen as a special case of a temporal
Kalman Filter 16-385 Computer Vision (Kris Kitani) Carnegie Mellon University Examples up to now have been discrete (binary) random variables Kalman filtering can be seen as a special case of a temporal
Image Gradients and Gradient Filtering Computer Vision
 Image Gradients and Gradient Filtering 16-385 Computer Vision What is an image edge? Recall that an image is a 2D function f(x) edge edge How would you detect an edge? What kinds of filter would you use?
Image Gradients and Gradient Filtering 16-385 Computer Vision What is an image edge? Recall that an image is a 2D function f(x) edge edge How would you detect an edge? What kinds of filter would you use?
Blobs & Scale Invariance
 Blobs & Scale Invariance Prof. Didier Stricker Doz. Gabriele Bleser Computer Vision: Object and People Tracking With slides from Bebis, S. Lazebnik & S. Seitz, D. Lowe, A. Efros 1 Apertizer: some videos
Blobs & Scale Invariance Prof. Didier Stricker Doz. Gabriele Bleser Computer Vision: Object and People Tracking With slides from Bebis, S. Lazebnik & S. Seitz, D. Lowe, A. Efros 1 Apertizer: some videos
Computer Vision Motion
 Computer Vision Motion Professor Hager http://www.cs.jhu.edu/~hager 12/1/12 CS 461, Copyright G.D. Hager Outline From Stereo to Motion The motion field and optical flow (2D motion) Factorization methods
Computer Vision Motion Professor Hager http://www.cs.jhu.edu/~hager 12/1/12 CS 461, Copyright G.D. Hager Outline From Stereo to Motion The motion field and optical flow (2D motion) Factorization methods
Lecture 8: Interest Point Detection. Saad J Bedros
 #1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Review of Edge Detectors #2 Today s Lecture Interest Points Detection What do we mean with Interest Point Detection in an Image Goal:
#1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Review of Edge Detectors #2 Today s Lecture Interest Points Detection What do we mean with Interest Point Detection in an Image Goal:
Image Alignment and Mosaicing Feature Tracking and the Kalman Filter
 Image Alignment and Mosaicing Feature Tracking and the Kalman Filter Image Alignment Applications Local alignment: Tracking Stereo Global alignment: Camera jitter elimination Image enhancement Panoramic
Image Alignment and Mosaicing Feature Tracking and the Kalman Filter Image Alignment Applications Local alignment: Tracking Stereo Global alignment: Camera jitter elimination Image enhancement Panoramic
Optical Flow, Motion Segmentation, Feature Tracking
 BIL 719 - Computer Vision May 21, 2014 Optical Flow, Motion Segmentation, Feature Tracking Aykut Erdem Dept. of Computer Engineering Hacettepe University Motion Optical Flow Motion Segmentation Feature
BIL 719 - Computer Vision May 21, 2014 Optical Flow, Motion Segmentation, Feature Tracking Aykut Erdem Dept. of Computer Engineering Hacettepe University Motion Optical Flow Motion Segmentation Feature
Corners, Blobs & Descriptors. With slides from S. Lazebnik & S. Seitz, D. Lowe, A. Efros
 Corners, Blobs & Descriptors With slides from S. Lazebnik & S. Seitz, D. Lowe, A. Efros Motivation: Build a Panorama M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 How do we build panorama?
Corners, Blobs & Descriptors With slides from S. Lazebnik & S. Seitz, D. Lowe, A. Efros Motivation: Build a Panorama M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 How do we build panorama?
A RAIN PIXEL RESTORATION ALGORITHM FOR VIDEOS WITH DYNAMIC SCENES
 A RAIN PIXEL RESTORATION ALGORITHM FOR VIDEOS WITH DYNAMIC SCENES V.Sridevi, P.Malarvizhi, P.Mathivannan Abstract Rain removal from a video is a challenging problem due to random spatial distribution and
A RAIN PIXEL RESTORATION ALGORITHM FOR VIDEOS WITH DYNAMIC SCENES V.Sridevi, P.Malarvizhi, P.Mathivannan Abstract Rain removal from a video is a challenging problem due to random spatial distribution and
Multigrid Acceleration of the Horn-Schunck Algorithm for the Optical Flow Problem
 Multigrid Acceleration of the Horn-Schunck Algorithm for the Optical Flow Problem El Mostafa Kalmoun kalmoun@cs.fau.de Ulrich Ruede ruede@cs.fau.de Institute of Computer Science 10 Friedrich Alexander
Multigrid Acceleration of the Horn-Schunck Algorithm for the Optical Flow Problem El Mostafa Kalmoun kalmoun@cs.fau.de Ulrich Ruede ruede@cs.fau.de Institute of Computer Science 10 Friedrich Alexander
Determining Constant Optical Flow
 Determining Constant Optical Flow Berthold K.P. Horn Copyright 003 The original optical flow algorithm [1] dealt with a flow field that could vary from place to place in the image, as would typically occur
Determining Constant Optical Flow Berthold K.P. Horn Copyright 003 The original optical flow algorithm [1] dealt with a flow field that could vary from place to place in the image, as would typically occur
Lecture 8: Interest Point Detection. Saad J Bedros
 #1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Last Lecture : Edge Detection Preprocessing of image is desired to eliminate or at least minimize noise effects There is always tradeoff
#1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Last Lecture : Edge Detection Preprocessing of image is desired to eliminate or at least minimize noise effects There is always tradeoff
What is Motion? As Visual Input: Change in the spatial distribution of light on the sensors.
 What is Motion? As Visual Input: Change in the spatial distribution of light on the sensors. Minimally, di(x,y,t)/dt 0 As Perception: Inference about causes of intensity change, e.g. I(x,y,t) v OBJ (x,y,z,t)
What is Motion? As Visual Input: Change in the spatial distribution of light on the sensors. Minimally, di(x,y,t)/dt 0 As Perception: Inference about causes of intensity change, e.g. I(x,y,t) v OBJ (x,y,z,t)
TRACKING and DETECTION in COMPUTER VISION
 Technischen Universität München Winter Semester 2013/2014 TRACKING and DETECTION in COMPUTER VISION Template tracking methods Slobodan Ilić Template based-tracking Energy-based methods The Lucas-Kanade(LK)
Technischen Universität München Winter Semester 2013/2014 TRACKING and DETECTION in COMPUTER VISION Template tracking methods Slobodan Ilić Template based-tracking Energy-based methods The Lucas-Kanade(LK)
Iterative Image Registration: Lucas & Kanade Revisited. Kentaro Toyama Vision Technology Group Microsoft Research
 Iterative Image Registration: Lucas & Kanade Revisited Kentaro Toyama Vision Technology Group Microsoft Research Every writer creates his own precursors. His work modifies our conception of the past, as
Iterative Image Registration: Lucas & Kanade Revisited Kentaro Toyama Vision Technology Group Microsoft Research Every writer creates his own precursors. His work modifies our conception of the past, as
Optical flow. Subhransu Maji. CMPSCI 670: Computer Vision. October 20, 2016
 Optical flow Subhransu Maji CMPSC 670: Computer Vision October 20, 2016 Visual motion Man slides adapted from S. Seitz, R. Szeliski, M. Pollefes CMPSC 670 2 Motion and perceptual organization Sometimes,
Optical flow Subhransu Maji CMPSC 670: Computer Vision October 20, 2016 Visual motion Man slides adapted from S. Seitz, R. Szeliski, M. Pollefes CMPSC 670 2 Motion and perceptual organization Sometimes,
Tracking for VR and AR
 Tracking for VR and AR Hakan Bilen November 17, 2017 Computer Graphics University of Edinburgh Slide credits: Gordon Wetzstein and Steven M. La Valle 1 Overview VR and AR Inertial Sensors Gyroscopes Accelerometers
Tracking for VR and AR Hakan Bilen November 17, 2017 Computer Graphics University of Edinburgh Slide credits: Gordon Wetzstein and Steven M. La Valle 1 Overview VR and AR Inertial Sensors Gyroscopes Accelerometers
Lecture 13: Tracking mo3on features op3cal flow
 Lecture 13: Tracking mo3on features op3cal flow Professor Fei- Fei Li Stanford Vision Lab Lecture 14-1! What we will learn today? Introduc3on Op3cal flow Feature tracking Applica3ons Reading: [Szeliski]
Lecture 13: Tracking mo3on features op3cal flow Professor Fei- Fei Li Stanford Vision Lab Lecture 14-1! What we will learn today? Introduc3on Op3cal flow Feature tracking Applica3ons Reading: [Szeliski]
Integration - Past Edexcel Exam Questions
 Integration - Past Edexcel Exam Questions 1. (a) Given that y = 5x 2 + 7x + 3, find i. - ii. - (b) ( 1 + 3 ) x 1 x dx. [4] 2. Question 2b - January 2005 2. The gradient of the curve C is given by The point
Integration - Past Edexcel Exam Questions 1. (a) Given that y = 5x 2 + 7x + 3, find i. - ii. - (b) ( 1 + 3 ) x 1 x dx. [4] 2. Question 2b - January 2005 2. The gradient of the curve C is given by The point
An Adaptive Confidence Measure for Optical Flows Based on Linear Subspace Projections
 An Adaptive Confidence Measure for Optical Flows Based on Linear Subspace Projections Claudia Kondermann, Daniel Kondermann, Bernd Jähne, Christoph Garbe Interdisciplinary Center for Scientific Computing
An Adaptive Confidence Measure for Optical Flows Based on Linear Subspace Projections Claudia Kondermann, Daniel Kondermann, Bernd Jähne, Christoph Garbe Interdisciplinary Center for Scientific Computing
Image Analysis. Feature extraction: corners and blobs
 Image Analysis Feature extraction: corners and blobs Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Svetlana Lazebnik, University of North Carolina at Chapel Hill (http://www.cs.unc.edu/~lazebnik/spring10/).
Image Analysis Feature extraction: corners and blobs Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Svetlana Lazebnik, University of North Carolina at Chapel Hill (http://www.cs.unc.edu/~lazebnik/spring10/).
Detectors part II Descriptors
 EECS 442 Computer vision Detectors part II Descriptors Blob detectors Invariance Descriptors Some slides of this lectures are courtesy of prof F. Li, prof S. Lazebnik, and various other lecturers Goal:
EECS 442 Computer vision Detectors part II Descriptors Blob detectors Invariance Descriptors Some slides of this lectures are courtesy of prof F. Li, prof S. Lazebnik, and various other lecturers Goal:
Image Alignment and Mosaicing
 Image Alignment and Mosaicing Image Alignment Applications Local alignment: Tracking Stereo Global alignment: Camera jitter elimination Image enhancement Panoramic mosaicing Image Enhancement Original
Image Alignment and Mosaicing Image Alignment Applications Local alignment: Tracking Stereo Global alignment: Camera jitter elimination Image enhancement Panoramic mosaicing Image Enhancement Original
Edge Detection. Introduction to Computer Vision. Useful Mathematics Funcs. The bad news
 Edge Detection Introduction to Computer Vision CS / ECE 8B Thursday, April, 004 Edge detection (HO #5) Edge detection is a local area operator that seeks to find significant, meaningful changes in image
Edge Detection Introduction to Computer Vision CS / ECE 8B Thursday, April, 004 Edge detection (HO #5) Edge detection is a local area operator that seeks to find significant, meaningful changes in image
Differential Motion Analysis (II)
") Differential Motion Analysis (II) Ying Wu Electrical Engineering and Computer Science Northwestern University, Evanston, IL 60208 yingwu@northwestern.edu http://www.eecs.northwestern.edu/~yingwu 1/30 Outline
Differential Motion Analysis (II) Ying Wu Electrical Engineering and Computer Science Northwestern University, Evanston, IL 60208 yingwu@northwestern.edu http://www.eecs.northwestern.edu/~yingwu 1/30 Outline
Visual Object Recognition
 Visual Object Recognition Lecture 2: Image Formation Per-Erik Forssén, docent Computer Vision Laboratory Department of Electrical Engineering Linköping University Lecture 2: Image Formation Pin-hole, and
Visual Object Recognition Lecture 2: Image Formation Per-Erik Forssén, docent Computer Vision Laboratory Department of Electrical Engineering Linköping University Lecture 2: Image Formation Pin-hole, and
INTEREST POINTS AT DIFFERENT SCALES
 INTEREST POINTS AT DIFFERENT SCALES Thank you for the slides. They come mostly from the following sources. Dan Huttenlocher Cornell U David Lowe U. of British Columbia Martial Hebert CMU Intuitively, junctions
INTEREST POINTS AT DIFFERENT SCALES Thank you for the slides. They come mostly from the following sources. Dan Huttenlocher Cornell U David Lowe U. of British Columbia Martial Hebert CMU Intuitively, junctions
Methods in Computer Vision: Introduction to Optical Flow
 Methods in Computer Vision: Introduction to Optical Flow Oren Freifeld Computer Science, Ben-Gurion University March 22 and March 26, 2017 Mar 22, 2017 1 / 81 A Preliminary Discussion Example and Flow
Methods in Computer Vision: Introduction to Optical Flow Oren Freifeld Computer Science, Ben-Gurion University March 22 and March 26, 2017 Mar 22, 2017 1 / 81 A Preliminary Discussion Example and Flow
SLAM Techniques and Algorithms. Jack Collier. Canada. Recherche et développement pour la défense Canada. Defence Research and Development Canada
 SLAM Techniques and Algorithms Jack Collier Defence Research and Development Canada Recherche et développement pour la défense Canada Canada Goals What will we learn Gain an appreciation for what SLAM
SLAM Techniques and Algorithms Jack Collier Defence Research and Development Canada Recherche et développement pour la défense Canada Canada Goals What will we learn Gain an appreciation for what SLAM
Achieving scale covariance
 Achieving scale covariance Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region size that is covariant
Achieving scale covariance Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region size that is covariant
Erkut Erdem. Hacettepe University February 24 th, Linear Diffusion 1. 2 Appendix - The Calculus of Variations 5.
 LINEAR DIFFUSION Erkut Erdem Hacettepe University February 24 th, 2012 CONTENTS 1 Linear Diffusion 1 2 Appendix - The Calculus of Variations 5 References 6 1 LINEAR DIFFUSION The linear diffusion (heat)
LINEAR DIFFUSION Erkut Erdem Hacettepe University February 24 th, 2012 CONTENTS 1 Linear Diffusion 1 2 Appendix - The Calculus of Variations 5 References 6 1 LINEAR DIFFUSION The linear diffusion (heat)
Vision for Mobile Robot Navigation: A Survey
 Vision for Mobile Robot Navigation: A Survey (February 2002) Guilherme N. DeSouza & Avinash C. Kak presentation by: Job Zondag 27 February 2009 Outline: Types of Navigation Absolute localization (Structured)
Vision for Mobile Robot Navigation: A Survey (February 2002) Guilherme N. DeSouza & Avinash C. Kak presentation by: Job Zondag 27 February 2009 Outline: Types of Navigation Absolute localization (Structured)
Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems
 Robots for People --- A project for intelligent integrated systems") 1 Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems V. Estivill-Castro 2 Perception Concepts Vision Chapter 4 (textbook) Sections 4.3 to 4.5 What is the course
1 Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems V. Estivill-Castro 2 Perception Concepts Vision Chapter 4 (textbook) Sections 4.3 to 4.5 What is the course
Multiple View Geometry in Computer Vision
 Multiple View Geometry in Computer Vision Prasanna Sahoo Department of Mathematics University of Louisville 1 Scene Planes & Homographies Lecture 19 March 24, 2005 2 In our last lecture, we examined various
Multiple View Geometry in Computer Vision Prasanna Sahoo Department of Mathematics University of Louisville 1 Scene Planes & Homographies Lecture 19 March 24, 2005 2 In our last lecture, we examined various
Subspace Methods for Visual Learning and Recognition
 This is a shortened version of the tutorial given at the ECCV 2002, Copenhagen, and ICPR 2002, Quebec City. Copyright 2002 by Aleš Leonardis, University of Ljubljana, and Horst Bischof, Graz University
This is a shortened version of the tutorial given at the ECCV 2002, Copenhagen, and ICPR 2002, Quebec City. Copyright 2002 by Aleš Leonardis, University of Ljubljana, and Horst Bischof, Graz University
Advances in Computer Vision. Prof. Bill Freeman. Image and shape descriptors. Readings: Mikolajczyk and Schmid; Belongie et al.
 6.869 Advances in Computer Vision Prof. Bill Freeman March 3, 2005 Image and shape descriptors Affine invariant features Comparison of feature descriptors Shape context Readings: Mikolajczyk and Schmid;
6.869 Advances in Computer Vision Prof. Bill Freeman March 3, 2005 Image and shape descriptors Affine invariant features Comparison of feature descriptors Shape context Readings: Mikolajczyk and Schmid;
EKF and SLAM. McGill COMP 765 Sept 18 th, 2017
 EKF and SLAM McGill COMP 765 Sept 18 th, 2017 Outline News and information Instructions for paper presentations Continue on Kalman filter: EKF and extension to mapping Example of a real mapping system:
EKF and SLAM McGill COMP 765 Sept 18 th, 2017 Outline News and information Instructions for paper presentations Continue on Kalman filter: EKF and extension to mapping Example of a real mapping system:
Deep Learning (CNNs)
") 10-601 Introduction to Machine Learning Machine Learning Department School of Computer Science Carnegie Mellon University Deep Learning (CNNs) Deep Learning Readings: Murphy 28 Bishop - - HTF - - Mitchell
10-601 Introduction to Machine Learning Machine Learning Department School of Computer Science Carnegie Mellon University Deep Learning (CNNs) Deep Learning Readings: Murphy 28 Bishop - - HTF - - Mitchell
LoG Blob Finding and Scale. Scale Selection. Blobs (and scale selection) Achieving scale covariance. Blob detection in 2D. Blob detection in 2D
 Achieving scale covariance. Blob detection in 2D. Blob detection in 2D") Achieving scale covariance Blobs (and scale selection) Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region
Achieving scale covariance Blobs (and scale selection) Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region
Differential Motion Analysis
 Differential Motion Analysis Ying Wu Electrical Engineering and Computer Science Northwestern University, Evanston, IL 60208 yingwu@ece.northwestern.edu http://www.eecs.northwestern.edu/~yingwu July 19,
Differential Motion Analysis Ying Wu Electrical Engineering and Computer Science Northwestern University, Evanston, IL 60208 yingwu@ece.northwestern.edu http://www.eecs.northwestern.edu/~yingwu July 19,
Advanced Features. Advanced Features: Topics. Jana Kosecka. Slides from: S. Thurn, D. Lowe, Forsyth and Ponce. Advanced features and feature matching
 Advanced Features Jana Kosecka Slides from: S. Thurn, D. Lowe, Forsyth and Ponce Advanced Features: Topics Advanced features and feature matching Template matching SIFT features Haar features 2 1 Features
Advanced Features Jana Kosecka Slides from: S. Thurn, D. Lowe, Forsyth and Ponce Advanced Features: Topics Advanced features and feature matching Template matching SIFT features Haar features 2 1 Features
Global parametric image alignment via high-order approximation
 Global parametric image alignment via high-order approximation Y. Keller, A. Averbuch 2 Electrical & Computer Engineering Department, Ben-Gurion University of the Negev. 2 School of Computer Science, Tel
Global parametric image alignment via high-order approximation Y. Keller, A. Averbuch 2 Electrical & Computer Engineering Department, Ben-Gurion University of the Negev. 2 School of Computer Science, Tel
Optical Flow, KLT Feature Tracker.
 Optical Flow, KL Feature racker E-mail: hogijung@hanang.ac.kr Motion in Computer Vision Motion Structure rom motion Detection/segmentation with direction [1] E-mail: hogijung@hanang.ac.kr Motion Field.s..
Optical Flow, KL Feature racker E-mail: hogijung@hanang.ac.kr Motion in Computer Vision Motion Structure rom motion Detection/segmentation with direction [1] E-mail: hogijung@hanang.ac.kr Motion Field.s..
Properties of detectors Edge detectors Harris DoG Properties of descriptors SIFT HOG Shape context
 Lecture 10 Detectors and descriptors Properties of detectors Edge detectors Harris DoG Properties of descriptors SIFT HOG Shape context Silvio Savarese Lecture 10-16-Feb-15 From the 3D to 2D & vice versa
Lecture 10 Detectors and descriptors Properties of detectors Edge detectors Harris DoG Properties of descriptors SIFT HOG Shape context Silvio Savarese Lecture 10-16-Feb-15 From the 3D to 2D & vice versa
Partial Derivatives Formulas. KristaKingMath.com
 Partial Derivatives Formulas KristaKingMath.com Domain and range of a multivariable function A function f of two variables is a rule that assigns to each ordered pair of real numbers (x, y) in a set D
Partial Derivatives Formulas KristaKingMath.com Domain and range of a multivariable function A function f of two variables is a rule that assigns to each ordered pair of real numbers (x, y) in a set D
6.869 Advances in Computer Vision. Prof. Bill Freeman March 1, 2005
 6.869 Advances in Computer Vision Prof. Bill Freeman March 1 2005 1 2 Local Features Matching points across images important for: object identification instance recognition object class recognition pose
6.869 Advances in Computer Vision Prof. Bill Freeman March 1 2005 1 2 Local Features Matching points across images important for: object identification instance recognition object class recognition pose
CSE 473/573 Computer Vision and Image Processing (CVIP)
") CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Lecture 11 Local Features 1 Schedule Last class We started local features Today More on local features Readings for
CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Lecture 11 Local Features 1 Schedule Last class We started local features Today More on local features Readings for
Review for Exam 1. Erik G. Learned-Miller Department of Computer Science University of Massachusetts, Amherst Amherst, MA
 Review for Exam Erik G. Learned-Miller Department of Computer Science University of Massachusetts, Amherst Amherst, MA 0003 March 26, 204 Abstract Here are some things you need to know for the in-class
Review for Exam Erik G. Learned-Miller Department of Computer Science University of Massachusetts, Amherst Amherst, MA 0003 March 26, 204 Abstract Here are some things you need to know for the in-class
Efficient & Robust LK for Mobile Vision
 Efficient & Robust LK for Mobile Vision Instructor - Simon Lucey 16-623 - Designing Comuter Vision As Direct Method (ours) Indirect Method (ORB+RANSAC) H. Alismail, B. Browning, S. Lucey Bit-Planes: Dense
Efficient & Robust LK for Mobile Vision Instructor - Simon Lucey 16-623 - Designing Comuter Vision As Direct Method (ours) Indirect Method (ORB+RANSAC) H. Alismail, B. Browning, S. Lucey Bit-Planes: Dense
Modeling Complex Temporal Composition of Actionlets for Activity Prediction
 Modeling Complex Temporal Composition of Actionlets for Activity Prediction ECCV 2012 Activity Recognition Reading Group Framework of activity prediction What is an Actionlet To segment a long sequence
Modeling Complex Temporal Composition of Actionlets for Activity Prediction ECCV 2012 Activity Recognition Reading Group Framework of activity prediction What is an Actionlet To segment a long sequence
Lecture 12 Body Pose and Dynamics
 15-869 Lecture 12 Body Pose and Dynamics Yaser Sheikh Human Motion Modeling and Analysis Fall 2012 Debate Advice Affirmative Team Thesis Statement: Every (good) paper has a thesis. What is the most provocative
15-869 Lecture 12 Body Pose and Dynamics Yaser Sheikh Human Motion Modeling and Analysis Fall 2012 Debate Advice Affirmative Team Thesis Statement: Every (good) paper has a thesis. What is the most provocative
SIFT: SCALE INVARIANT FEATURE TRANSFORM BY DAVID LOWE
 SIFT: SCALE INVARIANT FEATURE TRANSFORM BY DAVID LOWE Overview Motivation of Work Overview of Algorithm Scale Space and Difference of Gaussian Keypoint Localization Orientation Assignment Descriptor Building
SIFT: SCALE INVARIANT FEATURE TRANSFORM BY DAVID LOWE Overview Motivation of Work Overview of Algorithm Scale Space and Difference of Gaussian Keypoint Localization Orientation Assignment Descriptor Building
Estimating the Rotation of a Ball Using High Speed Camera
 1 2 1 1 1 2 Hough ICP 3DCG 3 6% 3% 6% Estimating the Rotation of a Ball Using High Speed Camera Hiroki Kamada, 1 Yoshinori Takeuchi, 2 Tetsuya Matsumoto, 1 Hiroaki Kudo 1 and Noburu Ohnishi 1 In table
1 2 1 1 1 2 Hough ICP 3DCG 3 6% 3% 6% Estimating the Rotation of a Ball Using High Speed Camera Hiroki Kamada, 1 Yoshinori Takeuchi, 2 Tetsuya Matsumoto, 1 Hiroaki Kudo 1 and Noburu Ohnishi 1 In table
CAMFPLAN. A Real-time Markerless Camera Pose Estimation System for Augmented Reality. Srinath Sridhar and Vineet R. Kamat
 CAMFPLAN A Real-time Markerless Camera Pose Estimation System for Augmented Reality By Srinath Sridhar and Vineet R. Kamat UMCEE Report No. 2011-01 Electrical Engineering and Computer Science Civil and
CAMFPLAN A Real-time Markerless Camera Pose Estimation System for Augmented Reality By Srinath Sridhar and Vineet R. Kamat UMCEE Report No. 2011-01 Electrical Engineering and Computer Science Civil and
Learning Linear Detectors
 Learning Linear Detectors Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Detection versus Classification Bayes Classifiers Linear Classifiers Examples of Detection 3 Learning: Detection
Learning Linear Detectors Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Detection versus Classification Bayes Classifiers Linear Classifiers Examples of Detection 3 Learning: Detection
Feature detectors and descriptors. Fei-Fei Li
 Feature detectors and descriptors Fei-Fei Li Feature Detection e.g. DoG detected points (~300) coordinates, neighbourhoods Feature Description e.g. SIFT local descriptors (invariant) vectors database of
Feature detectors and descriptors Fei-Fei Li Feature Detection e.g. DoG detected points (~300) coordinates, neighbourhoods Feature Description e.g. SIFT local descriptors (invariant) vectors database of
Robotics. Mobile Robotics. Marc Toussaint U Stuttgart
 Robotics Mobile Robotics State estimation, Bayes filter, odometry, particle filter, Kalman filter, SLAM, joint Bayes filter, EKF SLAM, particle SLAM, graph-based SLAM Marc Toussaint U Stuttgart DARPA Grand
Robotics Mobile Robotics State estimation, Bayes filter, odometry, particle filter, Kalman filter, SLAM, joint Bayes filter, EKF SLAM, particle SLAM, graph-based SLAM Marc Toussaint U Stuttgart DARPA Grand
FINITE DIFFERENCES. Lecture 1: (a) Operators (b) Forward Differences and their calculations. (c) Backward Differences and their calculations.
 Operators (b) Forward Differences and their calculations. (c) Backward Differences and their calculations.") FINITE DIFFERENCES Lecture 1: (a) Operators (b) Forward Differences and their calculations. (c) Backward Differences and their calculations. 1. Introduction When a function is known explicitly, it is easy
FINITE DIFFERENCES Lecture 1: (a) Operators (b) Forward Differences and their calculations. (c) Backward Differences and their calculations. 1. Introduction When a function is known explicitly, it is easy
Uncertainty Models in Quasiconvex Optimization for Geometric Reconstruction
 Uncertainty Models in Quasiconvex Optimization for Geometric Reconstruction Qifa Ke and Takeo Kanade Department of Computer Science, Carnegie Mellon University Email: ke@cmu.edu, tk@cs.cmu.edu Abstract
Uncertainty Models in Quasiconvex Optimization for Geometric Reconstruction Qifa Ke and Takeo Kanade Department of Computer Science, Carnegie Mellon University Email: ke@cmu.edu, tk@cs.cmu.edu Abstract
Example: f(x) = 2x² + 1 Solution: Math 2 VM Part 5 Quadratic Functions April 25, 2017
 = 2x² + 1 Solution: Math 2 VM Part 5 Quadratic Functions April 25, 2017") Math 2 Variable Manipulation Part 5 Quadratic Functions MATH 1 REVIEW THE CONCEPT OF FUNCTIONS The concept of a function is both a different way of thinking about equations and a different way of notating
Math 2 Variable Manipulation Part 5 Quadratic Functions MATH 1 REVIEW THE CONCEPT OF FUNCTIONS The concept of a function is both a different way of thinking about equations and a different way of notating
Harris Corner Detector
 Multimedia Computing: Algorithms, Systems, and Applications: Feature Extraction By Dr. Yu Cao Department of Computer Science The University of Massachusetts Lowell Lowell, MA 01854, USA Part of the slides
Multimedia Computing: Algorithms, Systems, and Applications: Feature Extraction By Dr. Yu Cao Department of Computer Science The University of Massachusetts Lowell Lowell, MA 01854, USA Part of the slides
DESIGNING CNN GENES. Received January 23, 2003; Revised April 2, 2003
 Tutorials and Reviews International Journal of Bifurcation and Chaos, Vol. 13, No. 10 (2003 2739 2824 c World Scientific Publishing Company DESIGNING CNN GENES MAKOTO ITOH Department of Information and
Tutorials and Reviews International Journal of Bifurcation and Chaos, Vol. 13, No. 10 (2003 2739 2824 c World Scientific Publishing Company DESIGNING CNN GENES MAKOTO ITOH Department of Information and
Loss Functions and Optimization. Lecture 3-1
 Lecture 3: Loss Functions and Optimization Lecture 3-1 Administrative Assignment 1 is released: http://cs231n.github.io/assignments2017/assignment1/ Due Thursday April 20, 11:59pm on Canvas (Extending
Lecture 3: Loss Functions and Optimization Lecture 3-1 Administrative Assignment 1 is released: http://cs231n.github.io/assignments2017/assignment1/ Due Thursday April 20, 11:59pm on Canvas (Extending
SIFT: Scale Invariant Feature Transform
 1 SIFT: Scale Invariant Feature Transform With slides from Sebastian Thrun Stanford CS223B Computer Vision, Winter 2006 3 Pattern Recognition Want to find in here SIFT Invariances: Scaling Rotation Illumination
1 SIFT: Scale Invariant Feature Transform With slides from Sebastian Thrun Stanford CS223B Computer Vision, Winter 2006 3 Pattern Recognition Want to find in here SIFT Invariances: Scaling Rotation Illumination
Bayes Filter Reminder. Kalman Filter Localization. Properties of Gaussians. Gaussians. Prediction. Correction. σ 2. Univariate. 1 2πσ e.
 Kalman Filter Localization Bayes Filter Reminder Prediction Correction Gaussians p(x) ~ N(µ,σ 2 ) : Properties of Gaussians Univariate p(x) = 1 1 2πσ e 2 (x µ) 2 σ 2 µ Univariate -σ σ Multivariate µ Multivariate
Kalman Filter Localization Bayes Filter Reminder Prediction Correction Gaussians p(x) ~ N(µ,σ 2 ) : Properties of Gaussians Univariate p(x) = 1 1 2πσ e 2 (x µ) 2 σ 2 µ Univariate -σ σ Multivariate µ Multivariate
Lecture 12. Local Feature Detection. Matching with Invariant Features. Why extract features? Why extract features? Why extract features?
 Lecture 1 Why extract eatures? Motivation: panorama stitching We have two images how do we combine them? Local Feature Detection Guest lecturer: Alex Berg Reading: Harris and Stephens David Lowe IJCV We
Lecture 1 Why extract eatures? Motivation: panorama stitching We have two images how do we combine them? Local Feature Detection Guest lecturer: Alex Berg Reading: Harris and Stephens David Lowe IJCV We
Single Exposure Enhancement and Reconstruction. Some slides are from: J. Kosecka, Y. Chuang, A. Efros, C. B. Owen, W. Freeman
 Single Exposure Enhancement and Reconstruction Some slides are from: J. Kosecka, Y. Chuang, A. Efros, C. B. Owen, W. Freeman 1 Reconstruction as an Inverse Problem Original image f Distortion & Sampling
Single Exposure Enhancement and Reconstruction Some slides are from: J. Kosecka, Y. Chuang, A. Efros, C. B. Owen, W. Freeman 1 Reconstruction as an Inverse Problem Original image f Distortion & Sampling
Feature detectors and descriptors. Fei-Fei Li
 Feature detectors and descriptors Fei-Fei Li Feature Detection e.g. DoG detected points (~300) coordinates, neighbourhoods Feature Description e.g. SIFT local descriptors (invariant) vectors database of
Feature detectors and descriptors Fei-Fei Li Feature Detection e.g. DoG detected points (~300) coordinates, neighbourhoods Feature Description e.g. SIFT local descriptors (invariant) vectors database of
CSE 598C Vision-based Tracking Seminar. Times: MW 10:10-11:00AM Willard 370 Instructor: Robert Collins Office Hours: Tues 2-4PM, Wed 9-9:50AM
 CSE 598C Vision-based Tracking Seminar Times: MW 10:10-11:00AM Willard 370 Instructor: Robert Collins Office Hours: Tues 2-4PM, Wed 9-9:50AM What is Tracking? typical idea: tracking a single target in
CSE 598C Vision-based Tracking Seminar Times: MW 10:10-11:00AM Willard 370 Instructor: Robert Collins Office Hours: Tues 2-4PM, Wed 9-9:50AM What is Tracking? typical idea: tracking a single target in
Single-Image-Based Rain and Snow Removal Using Multi-guided Filter
 Single-Image-Based Rain and Snow Removal Using Multi-guided Filter Xianhui Zheng 1, Yinghao Liao 1,,WeiGuo 2, Xueyang Fu 2, and Xinghao Ding 2 1 Department of Electronic Engineering, Xiamen University,
Single-Image-Based Rain and Snow Removal Using Multi-guided Filter Xianhui Zheng 1, Yinghao Liao 1,,WeiGuo 2, Xueyang Fu 2, and Xinghao Ding 2 1 Department of Electronic Engineering, Xiamen University,
Dense Optical Flow Estimation from the Monogenic Curvature Tensor
 Dense Optical Flow Estimation from the Monogenic Curvature Tensor Di Zang 1, Lennart Wietzke 1, Christian Schmaltz 2, and Gerald Sommer 1 1 Department of Computer Science, Christian-Albrechts-University
Dense Optical Flow Estimation from the Monogenic Curvature Tensor Di Zang 1, Lennart Wietzke 1, Christian Schmaltz 2, and Gerald Sommer 1 1 Department of Computer Science, Christian-Albrechts-University
Do We Really Have to Consider Covariance Matrices for Image Feature Points?
 Electronics and Communications in Japan, Part 3, Vol. 86, No. 1, 2003 Translated from Denshi Joho Tsushin Gakkai Ronbunshi, Vol. J85-A, No. 2, February 2002, pp. 231 239 Do We Really Have to Consider Covariance
Electronics and Communications in Japan, Part 3, Vol. 86, No. 1, 2003 Translated from Denshi Joho Tsushin Gakkai Ronbunshi, Vol. J85-A, No. 2, February 2002, pp. 231 239 Do We Really Have to Consider Covariance
Laplacian Filters. Sobel Filters. Laplacian Filters. Laplacian Filters. Laplacian Filters. Laplacian Filters
 Sobel Filters Note that smoothing the image before applying a Sobel filter typically gives better results. Even thresholding the Sobel filtered image cannot usually create precise, i.e., -pixel wide, edges.
Sobel Filters Note that smoothing the image before applying a Sobel filter typically gives better results. Even thresholding the Sobel filtered image cannot usually create precise, i.e., -pixel wide, edges.
Announcements. Tracking. Comptuer Vision I. The Motion Field. = ω. Pure Translation. Motion Field Equation. Rigid Motion: General Case
 Announcements Tracking Computer Vision I CSE5A Lecture 17 HW 3 due toda HW 4 will be on web site tomorrow: Face recognition using 3 techniques Toda: Tracking Reading: Sections 17.1-17.3 The Motion Field
Announcements Tracking Computer Vision I CSE5A Lecture 17 HW 3 due toda HW 4 will be on web site tomorrow: Face recognition using 3 techniques Toda: Tracking Reading: Sections 17.1-17.3 The Motion Field
Gradient Domain High Dynamic Range Compression
 Gradient Domain High Dynamic Range Compression Raanan Fattal Dani Lischinski Michael Werman The Hebrew University of Jerusalem School of Computer Science & Engineering 1 In A Nutshell 2 Dynamic Range Quantity
Gradient Domain High Dynamic Range Compression Raanan Fattal Dani Lischinski Michael Werman The Hebrew University of Jerusalem School of Computer Science & Engineering 1 In A Nutshell 2 Dynamic Range Quantity
Bayes Classifiers. CAP5610 Machine Learning Instructor: Guo-Jun QI
 Bayes Classifiers CAP5610 Machine Learning Instructor: Guo-Jun QI Recap: Joint distributions Joint distribution over Input vector X = (X 1, X 2 ) X 1 =B or B (drinking beer or not) X 2 = H or H (headache
Bayes Classifiers CAP5610 Machine Learning Instructor: Guo-Jun QI Recap: Joint distributions Joint distribution over Input vector X = (X 1, X 2 ) X 1 =B or B (drinking beer or not) X 2 = H or H (headache
A Factorization Method for 3D Multi-body Motion Estimation and Segmentation
 1 A Factorization Method for 3D Multi-body Motion Estimation and Segmentation René Vidal Department of EECS University of California Berkeley CA 94710 rvidal@eecs.berkeley.edu Stefano Soatto Dept. of Computer
1 A Factorization Method for 3D Multi-body Motion Estimation and Segmentation René Vidal Department of EECS University of California Berkeley CA 94710 rvidal@eecs.berkeley.edu Stefano Soatto Dept. of Computer
Shape of Gaussians as Feature Descriptors
 Shape of Gaussians as Feature Descriptors Liyu Gong, Tianjiang Wang and Fang Liu Intelligent and Distributed Computing Lab, School of Computer Science and Technology Huazhong University of Science and
Shape of Gaussians as Feature Descriptors Liyu Gong, Tianjiang Wang and Fang Liu Intelligent and Distributed Computing Lab, School of Computer Science and Technology Huazhong University of Science and
Optic Flow Computation with High Accuracy
 Cognitive Computer Vision Colloquium Prague, January 12 13, 2004 Optic Flow Computation with High ccuracy Joachim Weickert Saarland University Saarbrücken, Germany joint work with Thomas Brox ndrés Bruhn
Cognitive Computer Vision Colloquium Prague, January 12 13, 2004 Optic Flow Computation with High ccuracy Joachim Weickert Saarland University Saarbrücken, Germany joint work with Thomas Brox ndrés Bruhn
Vision-based navigation around small bodies
 Astronet-II, International Final Conference Vision-based navigation around small bodies Pawel Kicman VISION-BASED NAVIGATION IN SPACE Camera LOS (Line-of-sight) sensor Star-horizon measurements Apparent
Astronet-II, International Final Conference Vision-based navigation around small bodies Pawel Kicman VISION-BASED NAVIGATION IN SPACE Camera LOS (Line-of-sight) sensor Star-horizon measurements Apparent
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely Lecture 5: Feature descriptors and matching Szeliski: 4.1 Reading Announcements Project 1 Artifacts due tomorrow, Friday 2/17, at 11:59pm Project 2 will be released
CS5670: Computer Vision Noah Snavely Lecture 5: Feature descriptors and matching Szeliski: 4.1 Reading Announcements Project 1 Artifacts due tomorrow, Friday 2/17, at 11:59pm Project 2 will be released
Image Filtering. Slides, adapted from. Steve Seitz and Rick Szeliski, U.Washington
 Image Filtering Slides, adapted from Steve Seitz and Rick Szeliski, U.Washington The power of blur All is Vanity by Charles Allen Gillbert (1873-1929) Harmon LD & JuleszB (1973) The recognition of faces.
Image Filtering Slides, adapted from Steve Seitz and Rick Szeliski, U.Washington The power of blur All is Vanity by Charles Allen Gillbert (1873-1929) Harmon LD & JuleszB (1973) The recognition of faces.
MTH4101 CALCULUS II REVISION NOTES. 1. COMPLEX NUMBERS (Thomas Appendix 7 + lecture notes) ax 2 + bx + c = 0. x = b ± b 2 4ac 2a. i = 1.
 ax 2 + bx + c = 0. x = b ± b 2 4ac 2a. i = 1.") MTH4101 CALCULUS II REVISION NOTES 1. COMPLEX NUMBERS (Thomas Appendix 7 + lecture notes) 1.1 Introduction Types of numbers (natural, integers, rationals, reals) The need to solve quadratic equations:
MTH4101 CALCULUS II REVISION NOTES 1. COMPLEX NUMBERS (Thomas Appendix 7 + lecture notes) 1.1 Introduction Types of numbers (natural, integers, rationals, reals) The need to solve quadratic equations:
Lecture 5. Epipolar Geometry. Professor Silvio Savarese Computational Vision and Geometry Lab. 21-Jan-15. Lecture 5 - Silvio Savarese
 Lecture 5 Epipolar Geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 5-21-Jan-15 Lecture 5 Epipolar Geometry Why is stereo useful? Epipolar constraints Essential
Lecture 5 Epipolar Geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 5-21-Jan-15 Lecture 5 Epipolar Geometry Why is stereo useful? Epipolar constraints Essential