CS 3710: Visual Recognition Describing Images with Features. Adriana Kovashka Department of Computer Science January 8, 2015
|
|
|
- Horatio Baldwin
- 5 years ago
- Views:
Transcription
1 CS 3710: Visual Recognition Describing Images with Features Adriana Kovashka Department of Computer Science January 8, 2015
2 Plan for Today Presentation assignments + schedule changes Image filtering Feature detection Feature description Feature matching Next time: Classification and detection Adriana s research
3 Announcements Open door policy Fixed office hours? Adriana s travel Clarification of experiment presentations
4 Presentation Assignments
5 Image Description

6 An image is a set of pixels What we see What a computer sees S. Narasimhan Source: S. Narasimhan
7 Problems with pixel representation Not invariant to small changes Translation Illumination etc. Some parts of an image are more important than others What do we want to represent?
8 Preprocessing: Image filtering
9 Image filtering Compute a function of the local neighborhood at each pixel in the image Function specified by a filter or mask saying how to combine values from neighbors. Uses of filtering: Enhance an image (denoise, resize, etc) Extract information (texture, edges, etc) Detect patterns (template matching) Derek Hoiem, Kristen Grauman
10 Motivation: noise reduction Even multiple images of the same static scene will not be identical. Kristen Grauman

11 Common types of noise Salt and pepper noise: random occurrences of black and white pixels Impulse noise: random occurrences of white pixels Gaussian noise: variations in intensity drawn from a Gaussian normal distribution Kristen Grauman, Steve Seitz



12 Motivation: noise reduction How could we reduce the noise, i.e., give an estimate of the true intensities? What if there s only one image? Kristen Grauman
13 First attempt at a solution Let s replace each pixel with an average of all the values in its neighborhood Assumptions: Expect pixels to be like their neighbors Expect noise processes to be independent from pixel to pixel Kristen Grauman
14 First attempt at a solution Let s replace each pixel with an average of all the values in its neighborhood Moving average in 1D: Kristen Grauman, S. Marschner
15 Weighted Moving Average Can add weights to our moving average Weights [1, 1, 1, 1, 1] / 5 Non-uniform weights [1, 4, 6, 4, 1] / 16 Kristen Grauman, S. Marschner
16 Moving Average In 2D Kristen Grauman, Steve Seitz
17 Moving Average In 2D Kristen Grauman, Steve Seitz
18 Moving Average In 2D Kristen Grauman, Steve Seitz
19 Moving Average In 2D Kristen Grauman, Steve Seitz
20 Moving Average In 2D Kristen Grauman, Steve Seitz
21 Moving Average In 2D Kristen Grauman, Steve Seitz
22 Moving Average In 2D Kristen Grauman, Steve Seitz
23 Correlation filtering Say the averaging window size is 2k+1 x 2k+1: Attribute uniform weight to each pixel Loop over all pixels in neighborhood around image pixel F[i,j] Now generalize to allow different weights depending on neighboring pixel s relative position: Non-uniform weights Kristen Grauman
24 Correlation filtering This is called cross-correlation, denoted Filtering an image: replace each pixel with a linear combination of its neighbors. The filter kernel or mask H[u,v] is the prescription for the weights in the linear combination. Kristen Grauman

25 Gaussian filter What if we want nearest neighboring pixels to have the most influence on the output? This kernel is an approximation of a 2d Gaussian function: Removes high-frequency components from the image ( low-pass filter ). Kristen Grauman, Steve Seitz


26 Kristen Grauman Smoothing with a Gaussian


27 Smoothing with a Gaussian Dali Antonio Torralba

28 Aude Oliva Marilyn Einstein
29 Describing images with features: Feature detection

30 Kristen Grauman What points would you choose?
31 Local features: desired properties Repeatability The same feature can be found in several images despite geometric and photometric transformations Saliency Each feature has a distinctive description Compactness and efficiency Many fewer features than image pixels Locality A feature occupies a relatively small area of the image; robust to clutter and occlusion Kristen Grauman
32 Goal: interest operator repeatability We want to detect (at least some of) the same points in both images. Kristen Grauman No chance to find true matches, yet we have to be able to run the detection procedure independently per image.
33 Goal: descriptor distinctiveness We want to be able to reliably determine which point goes with which.? Must provide some invariance to geometric and photometric differences between the two views. Kristen Grauman
34 Corners as distinctive interest points We should easily recognize the point by looking through a small window Shifting a window in any direction should give a large change in intensity flat region: no change in all directions Alyosha Efros, Darya Frolova, Denis Simakov edge : no change along the edge direction corner : significant change in all directions
35 Harris Detector: Mathematics Window-averaged squared change of intensity induced by shifting the image data by [u,v]: Window function Shifted intensity Intensity Window function w(x,y) = or 1 in window, 0 outside Gaussian Darya Frolova, Denis Simakov

![the image data by [u,v]: Window function Shifted](/docs-images/90/103254485/images/36-3.jpg "intensity Intensity E(u, v) Darya Frolova, Denis")
36 Harris Detector: Mathematics Window-averaged squared change of intensity induced by shifting the image data by [u,v]: Window function Shifted intensity Intensity E(u, v) Darya Frolova, Denis Simakov
![Harris Detector: Mathematics Expanding I(x,y) in a Taylor series expansion, we have, for small shifts [u,v], a quadratic approximation to the](/docs-images/90/103254485/images/37-1.jpg "error surface between a patch and itself, shifted by [u,v]: where M is a 2 2 matrix computed from image derivatives: Darya Frolova, Denis")
37 Harris Detector: Mathematics Expanding I(x,y) in a Taylor series expansion, we have, for small shifts [u,v], a quadratic approximation to the error surface between a patch and itself, shifted by [u,v]: where M is a 2 2 matrix computed from image derivatives: Darya Frolova, Denis Simakov




38 y y y x y x x x I I I I I I I I y x w M ), ( x I I x y I I y y I x I I I y x Notation: Kristen Grauman Harris Detector: Mathematics
39 What does this matrix reveal? Since M is symmetric, we have M X X 2 T Mx i x i i The eigenvalues of M reveal the amount of intensity change in the two principal orthogonal gradient directions in the window. Kristen Grauman
40 Corner response function edge : 1 >> 2 2 >> 1 corner : 1 and 2 are large, 1 ~ 2 flat region: 1 and 2 are small Alyosha Efros, Darya Frolova, Denis Simakov, Kristen Grauman

41 Harris Detector: Mathematics Measure of corner response: (k empirical constant, k = ) Darya Frolova, Denis Simakov
 Take the points of locally maximum R as the detected feature points (i.e., pixels where R is bigger than for all the 4 or 8 neighbors).")
42 Harris Detector: Summary Compute image gradients Ix and Iy for all pixels For each pixel Compute by looping over neighbors x,y compute Find points with large corner response function R (R > threshold) Take the points of locally maximum R as the detected feature points (i.e., pixels where R is bigger than for all the 4 or 8 neighbors). Darya Frolova, Denis Simakov 42

43 Kristen Grauman Example of Harris application
44 Harris Detector: Some Properties Partial invariance to additive and multiplicative intensity changes Only derivatives are used => invariance to intensity shift Intensity scaling: fine, except for the threshold that s used to specify when R is large enough. R R threshold x (image coordinate) x (image coordinate) Darya Frolova, Denis Simakov


45 Harris Detector: Some Properties Invariant to image scale? image zoomed image Antonio Torralba
46 Harris Detector: Some Properties Not invariant to image scale! All points will be classified as edges Corner! Darya Frolova, Denis Simakov
47 Scale Invariant Detection The problem: how do we choose corresponding circles independently in each image? Do objects in the image have a characteristic scale that we can identify? Darya Frolova, Denis Simakov
48 Solution: Scale Invariant Detection Design a function on the region (circle), which is scale invariant (the same for corresponding regions, even if they are at different scales) Take a local maximum of this function f Image 1 f Image 2 scale = 1/2 Antonio Torralba s 1 s 2 region size region size
49 Scale Invariant Detection A good function for scale detection: has one stable sharp peak f Bad region size f Bad region size f Good! region size For usual images: a good function would be a one which responds to contrast (sharp local intensity change) Antonio Torralba
 where Gaussian Note: both kernels are invariant to scale and rotation Darya Frolova,")
50 Scale Invariant Detection Functions for determining scale Kernels: (Laplacian: 2nd derivative of Gaussian) (Difference of Gaussians) where Gaussian Note: both kernels are invariant to scale and rotation Darya Frolova, Denis Simakov
51 K.Mikolajczyk, C.Schmid. Indexing Based on Scale Invariant Interest Points. ICCV 2001 Laplacian Scale Invariant Detectors Harris-Laplacian Find local maximum of: Harris corner detector in space (image coordinates) Laplacian in scale scale y Harris x
52 Describing images with features: Feature description
53 Raw patches as local descriptors The simplest way to describe the neighborhood around an interest point is to write down the list of intensities to form a feature vector. But this is very sensitive to even small shifts, rotations. Kristen Grauman
54 Geometric transformations Kristen Grauman e.g. scale, translation, rotation

55 Photometric transformations Kristen Grauman, Tinne Tuytelaars
![SIFT descriptor [Lowe 2004] Use](/docs-images/90/103254485/images/56-0.jpg "histograms to bin pixels within")

56 SIFT descriptor [Lowe 2004] Use histograms to bin pixels within sub-patches according to their orientation. 0 2p Kristen Grauman


57 Making the descriptor rotation invariant CSE 576: Computer Vision Rotate the patch according to its dominant gradient orientation This puts the patches into a canonical orientation Kristen Grauman, Matthew Brown
 Bin gradients from 8x8")

58 Image features: Histograms of oriented gradients (HOG) Bin gradients from 8x8 pixel neighborhoods into 9 orientations Deva Ramanan (Dalal & Triggs CVPR 05)
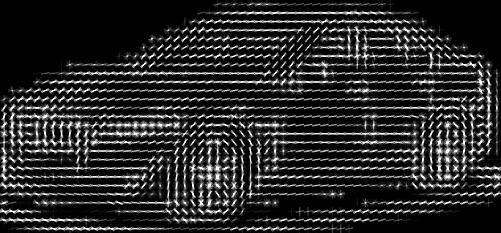


59 What is this?
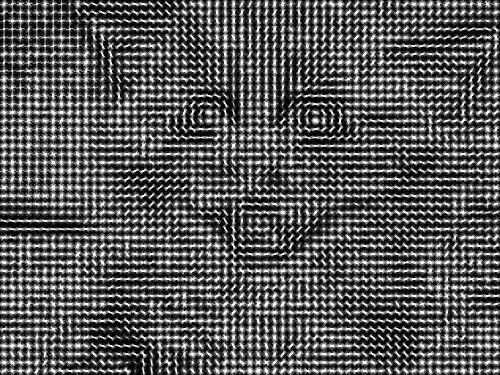


60 What is this?



61 What is this?
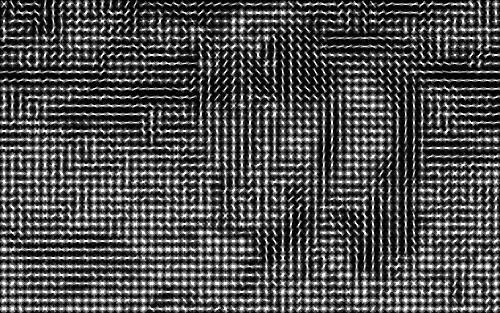


62 What is this?
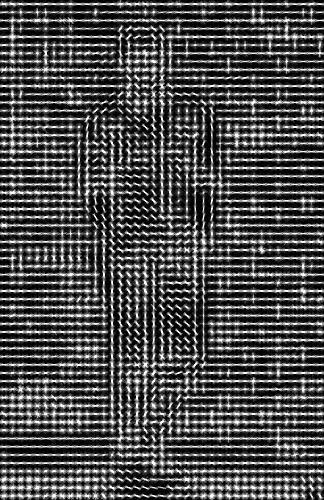


63 What is this?



64 What is this?


65 What is this?



66 What is this?



67 What is this?

68 What is this?

69 Kristen Grauman Filter Banks

70 Image from Kristen Grauman

71 Kristen Grauman Showing magnitude of responses
72 Kristen Grauman

73 Kristen Grauman
74 Kristen Grauman
75 Kristen Grauman

76 Kristen Grauman
77 Can you match the texture to the response? Filters A 1 B 2 C 3 Derek Hoiem Mean responses

78 Representing texture by mean response Filters Derek Hoiem Mean responses
![[r1, r2,, r38] We can](/docs-images/90/103254485/images/79-0.jpg "form a feature vector")

79 [r1, r2,, r38] We can form a feature vector from the list of responses at each pixel. Kristen Grauman
80 Shape Context Belongie, Malik and Puzicha, PAMI 2002 Representation of the local shape around a feature location as histogram of edge points in an image relative to that location. Computed by counting edge points in log polar space. Tamara Berg
 color space (RGB, HSV etc).")
81 Color Histograms Representation of the distribution of colors in an image, derived by counting the number of pixels of each of given set of color ranges in a typically (3D) color space (RGB, HSV etc). Tamara Berg



82 Gist Oliva and Torralba, IJCV 2001 Captures the global energy of the scene. Computes edge orientation responses for multiple orientations and scales. Tamara Berg
83 Describing images with features: Feature matching



84 Correspondence and alignment Correspondence: matching points, patches, edges, or regions across images James Hays
85 Correspondence and alignment Alignment: find the parameters of the transformation that best align matched points Fitting: find the parameters of a model that best fit the data James Hays
86 Hough Transform P.V.C. Hough, Machine Analysis of Bubble Chamber Pictures, Proc. Int. Conf. High Energy Accelerators and Instrumentation, 1959 Given a set of points, find the curve or line that explains the data points best y m x Hough space b y = m x + b m = (y b) / x James Hays, Silvio Savarese
87 Hough Transform y m x b y m James Hays, Silvio Savarese x b
88 RANSAC (RANdom SAmple Consensus) : Fischler & Bolles in 81. Algorithm: 1. Sample (randomly) the number of points required to fit the model 2. Solve for model parameters using samples 3. Score by the fraction of inliers within a preset threshold of the model Repeat 1-3 until the best model is found with high confidence James Hays, Silvio Savarese
89 RANSAC Line fitting example Algorithm: 1. Sample (randomly) the number of points required to fit the model (#=2) 2. Solve for model parameters using samples 3. Score by the fraction of inliers within a preset threshold of the model Repeat 1-3 until the best model is found with high confidence James Hays, Silvio Savarese
90 RANSAC Line fitting example Algorithm: 1. Sample (randomly) the number of points required to fit the model (#=2) 2. Solve for model parameters using samples 3. Score by the fraction of inliers within a preset threshold of the model Repeat 1-3 until the best model is found with high confidence James Hays, Silvio Savarese
91 RANSAC Line fitting example N I 6 Algorithm: 1. Sample (randomly) the number of points required to fit the model (#=2) 2. Solve for model parameters using samples 3. Score by the fraction of inliers within a preset threshold of the model Repeat 1-3 until the best model is found with high confidence James Hays, Silvio Savarese
92 RANSAC Algorithm: 1. Sample (randomly) the number of points required to fit the model (#=2) 2. Solve for model parameters using samples 3. Score by the fraction of inliers within a preset threshold of the model Repeat 1-3 until the best model is found with high confidence N I 14 James Hays, Silvio Savarese
93 Example: solving for translation A 1 A 2 A 3 B 1 B 2 B 3 Given matched points in {A} and {B}, estimate the translation of the object y x A i A i B i B i t t y x y x Derek Hoiem
94 Example: solving for translation A 1 A 2 A 3 B 1 B 2 B 3 Least squares solution y x A i A i B i B i t t y x y x (t x, t y ) 1. Write down objective function 2. Write in form Ax=b 3. Solve using pseudo-inverse or eigenvalue decomposition A n B n A n B n A B A B y x y y x x y y x x t t Derek Hoiem
95 Example: solving for translation B 4 A 1 B 5 B 6 A 2 A B 1 3 (t x, t y ) A 4 B 2 B 3 A 5 A 6 Problem: outliers, multiple objects, and/or many-to-one matches Derek Hoiem Hough transform solution 1. Initialize a grid of parameter values 2. Each matched pair casts a vote for consistent values 3. Find the parameters with the most votes 4. Solve using least squares with inliers x y B i B i x y A i A i t t x y
96 Example: solving for translation A 1 A 5 B 4 A 2 A B 1 3 (t x, t y ) A 4 B 2 B 3 B 5 Problem: outliers RANSAC solution 1. Sample a set of matching points (1 pair) 2. Solve for transformation parameters 3. Score parameters with number of inliers 4. Repeat steps 1-3 N times x y B i B i x y A i A i t t x y Derek Hoiem
97 Local features: main components 1) Detection: Identify the interest points 2) Description: Extract vector feature descriptor surrounding each interest point x (1) [ x,, x (1) 1 1 d ] 3) Matching: Determine correspondence between descriptors in two views x (2) [ x,, x (2) 2 1 d ] Kristen Grauman
98 Next Time Classification and detection Adriana s research
Recap: edge detection. Source: D. Lowe, L. Fei-Fei
 Recap: edge detection Source: D. Lowe, L. Fei-Fei Canny edge detector 1. Filter image with x, y derivatives of Gaussian 2. Find magnitude and orientation of gradient 3. Non-maximum suppression: Thin multi-pixel
Recap: edge detection Source: D. Lowe, L. Fei-Fei Canny edge detector 1. Filter image with x, y derivatives of Gaussian 2. Find magnitude and orientation of gradient 3. Non-maximum suppression: Thin multi-pixel
Corners, Blobs & Descriptors. With slides from S. Lazebnik & S. Seitz, D. Lowe, A. Efros
 Corners, Blobs & Descriptors With slides from S. Lazebnik & S. Seitz, D. Lowe, A. Efros Motivation: Build a Panorama M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 How do we build panorama?
Corners, Blobs & Descriptors With slides from S. Lazebnik & S. Seitz, D. Lowe, A. Efros Motivation: Build a Panorama M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 How do we build panorama?
Advances in Computer Vision. Prof. Bill Freeman. Image and shape descriptors. Readings: Mikolajczyk and Schmid; Belongie et al.
 6.869 Advances in Computer Vision Prof. Bill Freeman March 3, 2005 Image and shape descriptors Affine invariant features Comparison of feature descriptors Shape context Readings: Mikolajczyk and Schmid;
6.869 Advances in Computer Vision Prof. Bill Freeman March 3, 2005 Image and shape descriptors Affine invariant features Comparison of feature descriptors Shape context Readings: Mikolajczyk and Schmid;
Edges and Scale. Image Features. Detecting edges. Origin of Edges. Solution: smooth first. Effects of noise
 Edges and Scale Image Features From Sandlot Science Slides revised from S. Seitz, R. Szeliski, S. Lazebnik, etc. Origin of Edges surface normal discontinuity depth discontinuity surface color discontinuity
Edges and Scale Image Features From Sandlot Science Slides revised from S. Seitz, R. Szeliski, S. Lazebnik, etc. Origin of Edges surface normal discontinuity depth discontinuity surface color discontinuity
Properties of detectors Edge detectors Harris DoG Properties of descriptors SIFT HOG Shape context
 Lecture 10 Detectors and descriptors Properties of detectors Edge detectors Harris DoG Properties of descriptors SIFT HOG Shape context Silvio Savarese Lecture 10-16-Feb-15 From the 3D to 2D & vice versa
Lecture 10 Detectors and descriptors Properties of detectors Edge detectors Harris DoG Properties of descriptors SIFT HOG Shape context Silvio Savarese Lecture 10-16-Feb-15 From the 3D to 2D & vice versa
Lecture 8: Interest Point Detection. Saad J Bedros
 #1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Review of Edge Detectors #2 Today s Lecture Interest Points Detection What do we mean with Interest Point Detection in an Image Goal:
#1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Review of Edge Detectors #2 Today s Lecture Interest Points Detection What do we mean with Interest Point Detection in an Image Goal:
Lecture 8: Interest Point Detection. Saad J Bedros
 #1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Last Lecture : Edge Detection Preprocessing of image is desired to eliminate or at least minimize noise effects There is always tradeoff
#1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Last Lecture : Edge Detection Preprocessing of image is desired to eliminate or at least minimize noise effects There is always tradeoff
Feature extraction: Corners and blobs
 Feature extraction: Corners and blobs Review: Linear filtering and edge detection Name two different kinds of image noise Name a non-linear smoothing filter What advantages does median filtering have over
Feature extraction: Corners and blobs Review: Linear filtering and edge detection Name two different kinds of image noise Name a non-linear smoothing filter What advantages does median filtering have over
Image matching. by Diva Sian. by swashford
 Image matching by Diva Sian by swashford Harder case by Diva Sian by scgbt Invariant local features Find features that are invariant to transformations geometric invariance: translation, rotation, scale
Image matching by Diva Sian by swashford Harder case by Diva Sian by scgbt Invariant local features Find features that are invariant to transformations geometric invariance: translation, rotation, scale
INTEREST POINTS AT DIFFERENT SCALES
 INTEREST POINTS AT DIFFERENT SCALES Thank you for the slides. They come mostly from the following sources. Dan Huttenlocher Cornell U David Lowe U. of British Columbia Martial Hebert CMU Intuitively, junctions
INTEREST POINTS AT DIFFERENT SCALES Thank you for the slides. They come mostly from the following sources. Dan Huttenlocher Cornell U David Lowe U. of British Columbia Martial Hebert CMU Intuitively, junctions
Lecture 12. Local Feature Detection. Matching with Invariant Features. Why extract features? Why extract features? Why extract features?
 Lecture 1 Why extract eatures? Motivation: panorama stitching We have two images how do we combine them? Local Feature Detection Guest lecturer: Alex Berg Reading: Harris and Stephens David Lowe IJCV We
Lecture 1 Why extract eatures? Motivation: panorama stitching We have two images how do we combine them? Local Feature Detection Guest lecturer: Alex Berg Reading: Harris and Stephens David Lowe IJCV We
CSE 473/573 Computer Vision and Image Processing (CVIP)
") CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Lecture 11 Local Features 1 Schedule Last class We started local features Today More on local features Readings for
CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Lecture 11 Local Features 1 Schedule Last class We started local features Today More on local features Readings for
Lecture 6: Finding Features (part 1/2)
") Lecture 6: Finding Features (part 1/2) Professor Fei- Fei Li Stanford Vision Lab Lecture 6 -! 1 What we will learn today? Local invariant features MoHvaHon Requirements, invariances Keypoint localizahon
Lecture 6: Finding Features (part 1/2) Professor Fei- Fei Li Stanford Vision Lab Lecture 6 -! 1 What we will learn today? Local invariant features MoHvaHon Requirements, invariances Keypoint localizahon
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely Lecture 5: Feature descriptors and matching Szeliski: 4.1 Reading Announcements Project 1 Artifacts due tomorrow, Friday 2/17, at 11:59pm Project 2 will be released
CS5670: Computer Vision Noah Snavely Lecture 5: Feature descriptors and matching Szeliski: 4.1 Reading Announcements Project 1 Artifacts due tomorrow, Friday 2/17, at 11:59pm Project 2 will be released
Invariant local features. Invariant Local Features. Classes of transformations. (Good) invariant local features. Case study: panorama stitching
 invariant local features. Case study: panorama stitching") Invariant local eatures Invariant Local Features Tuesday, February 6 Subset o local eature types designed to be invariant to Scale Translation Rotation Aine transormations Illumination 1) Detect distinctive
Invariant local eatures Invariant Local Features Tuesday, February 6 Subset o local eature types designed to be invariant to Scale Translation Rotation Aine transormations Illumination 1) Detect distinctive
Blobs & Scale Invariance
 Blobs & Scale Invariance Prof. Didier Stricker Doz. Gabriele Bleser Computer Vision: Object and People Tracking With slides from Bebis, S. Lazebnik & S. Seitz, D. Lowe, A. Efros 1 Apertizer: some videos
Blobs & Scale Invariance Prof. Didier Stricker Doz. Gabriele Bleser Computer Vision: Object and People Tracking With slides from Bebis, S. Lazebnik & S. Seitz, D. Lowe, A. Efros 1 Apertizer: some videos
Detectors part II Descriptors
 EECS 442 Computer vision Detectors part II Descriptors Blob detectors Invariance Descriptors Some slides of this lectures are courtesy of prof F. Li, prof S. Lazebnik, and various other lecturers Goal:
EECS 442 Computer vision Detectors part II Descriptors Blob detectors Invariance Descriptors Some slides of this lectures are courtesy of prof F. Li, prof S. Lazebnik, and various other lecturers Goal:
Corner detection: the basic idea
 Corner detection: the basic idea At a corner, shifting a window in any direction should give a large change in intensity flat region: no change in all directions edge : no change along the edge direction
Corner detection: the basic idea At a corner, shifting a window in any direction should give a large change in intensity flat region: no change in all directions edge : no change along the edge direction
Feature detectors and descriptors. Fei-Fei Li
 Feature detectors and descriptors Fei-Fei Li Feature Detection e.g. DoG detected points (~300) coordinates, neighbourhoods Feature Description e.g. SIFT local descriptors (invariant) vectors database of
Feature detectors and descriptors Fei-Fei Li Feature Detection e.g. DoG detected points (~300) coordinates, neighbourhoods Feature Description e.g. SIFT local descriptors (invariant) vectors database of
Templates, Image Pyramids, and Filter Banks
 Templates, Image Pyramids, and Filter Banks 09/9/ Computer Vision James Hays, Brown Slides: Hoiem and others Review. Match the spatial domain image to the Fourier magnitude image 2 3 4 5 B A C D E Slide:
Templates, Image Pyramids, and Filter Banks 09/9/ Computer Vision James Hays, Brown Slides: Hoiem and others Review. Match the spatial domain image to the Fourier magnitude image 2 3 4 5 B A C D E Slide:
LoG Blob Finding and Scale. Scale Selection. Blobs (and scale selection) Achieving scale covariance. Blob detection in 2D. Blob detection in 2D
 Achieving scale covariance. Blob detection in 2D. Blob detection in 2D") Achieving scale covariance Blobs (and scale selection) Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region
Achieving scale covariance Blobs (and scale selection) Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region
Achieving scale covariance
 Achieving scale covariance Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region size that is covariant
Achieving scale covariance Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region size that is covariant
Feature detectors and descriptors. Fei-Fei Li
 Feature detectors and descriptors Fei-Fei Li Feature Detection e.g. DoG detected points (~300) coordinates, neighbourhoods Feature Description e.g. SIFT local descriptors (invariant) vectors database of
Feature detectors and descriptors Fei-Fei Li Feature Detection e.g. DoG detected points (~300) coordinates, neighbourhoods Feature Description e.g. SIFT local descriptors (invariant) vectors database of
Lecture 7: Finding Features (part 2/2)
") Lecture 7: Finding Features (part 2/2) Dr. Juan Carlos Niebles Stanford AI Lab Professor Fei- Fei Li Stanford Vision Lab 1 What we will learn today? Local invariant features MoPvaPon Requirements, invariances
Lecture 7: Finding Features (part 2/2) Dr. Juan Carlos Niebles Stanford AI Lab Professor Fei- Fei Li Stanford Vision Lab 1 What we will learn today? Local invariant features MoPvaPon Requirements, invariances
Lecture 7: Finding Features (part 2/2)
") Lecture 7: Finding Features (part 2/2) Professor Fei- Fei Li Stanford Vision Lab Lecture 7 -! 1 What we will learn today? Local invariant features MoHvaHon Requirements, invariances Keypoint localizahon
Lecture 7: Finding Features (part 2/2) Professor Fei- Fei Li Stanford Vision Lab Lecture 7 -! 1 What we will learn today? Local invariant features MoHvaHon Requirements, invariances Keypoint localizahon
Image Analysis. Feature extraction: corners and blobs
 Image Analysis Feature extraction: corners and blobs Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Svetlana Lazebnik, University of North Carolina at Chapel Hill (http://www.cs.unc.edu/~lazebnik/spring10/).
Image Analysis Feature extraction: corners and blobs Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Svetlana Lazebnik, University of North Carolina at Chapel Hill (http://www.cs.unc.edu/~lazebnik/spring10/).
Local Features (contd.)
") Motivation Local Features (contd.) Readings: Mikolajczyk and Schmid; F&P Ch 10 Feature points are used also or: Image alignment (homography, undamental matrix) 3D reconstruction Motion tracking Object
Motivation Local Features (contd.) Readings: Mikolajczyk and Schmid; F&P Ch 10 Feature points are used also or: Image alignment (homography, undamental matrix) 3D reconstruction Motion tracking Object
Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems
 Robots for People --- A project for intelligent integrated systems") 1 Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems V. Estivill-Castro 2 Perception Concepts Vision Chapter 4 (textbook) Sections 4.3 to 4.5 What is the course
1 Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems V. Estivill-Castro 2 Perception Concepts Vision Chapter 4 (textbook) Sections 4.3 to 4.5 What is the course
Keypoint extraction: Corners Harris Corners Pkwy, Charlotte, NC
 Kepoint etraction: Corners 9300 Harris Corners Pkw Charlotte NC Wh etract kepoints? Motivation: panorama stitching We have two images how do we combine them? Wh etract kepoints? Motivation: panorama stitching
Kepoint etraction: Corners 9300 Harris Corners Pkw Charlotte NC Wh etract kepoints? Motivation: panorama stitching We have two images how do we combine them? Wh etract kepoints? Motivation: panorama stitching
Computer Vision Lecture 3
 Computer Vision Lecture 3 Linear Filters 03.11.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Demo Haribo Classification Code available on the class website...
Computer Vision Lecture 3 Linear Filters 03.11.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Demo Haribo Classification Code available on the class website...
Global Scene Representations. Tilke Judd
 Global Scene Representations Tilke Judd Papers Oliva and Torralba [2001] Fei Fei and Perona [2005] Labzebnik, Schmid and Ponce [2006] Commonalities Goal: Recognize natural scene categories Extract features
Global Scene Representations Tilke Judd Papers Oliva and Torralba [2001] Fei Fei and Perona [2005] Labzebnik, Schmid and Ponce [2006] Commonalities Goal: Recognize natural scene categories Extract features
CS4670: Computer Vision Kavita Bala. Lecture 7: Harris Corner Detec=on
 CS4670: Computer Vision Kavita Bala Lecture 7: Harris Corner Detec=on Announcements HW 1 will be out soon Sign up for demo slots for PA 1 Remember that both partners have to be there We will ask you to
CS4670: Computer Vision Kavita Bala Lecture 7: Harris Corner Detec=on Announcements HW 1 will be out soon Sign up for demo slots for PA 1 Remember that both partners have to be there We will ask you to
Distinguish between different types of scenes. Matching human perception Understanding the environment
 Scene Recognition Adriana Kovashka UTCS, PhD student Problem Statement Distinguish between different types of scenes Applications Matching human perception Understanding the environment Indexing of images
Scene Recognition Adriana Kovashka UTCS, PhD student Problem Statement Distinguish between different types of scenes Applications Matching human perception Understanding the environment Indexing of images
Optical Flow, Motion Segmentation, Feature Tracking
 BIL 719 - Computer Vision May 21, 2014 Optical Flow, Motion Segmentation, Feature Tracking Aykut Erdem Dept. of Computer Engineering Hacettepe University Motion Optical Flow Motion Segmentation Feature
BIL 719 - Computer Vision May 21, 2014 Optical Flow, Motion Segmentation, Feature Tracking Aykut Erdem Dept. of Computer Engineering Hacettepe University Motion Optical Flow Motion Segmentation Feature
EE 6882 Visual Search Engine
 EE 6882 Visual Search Engine Prof. Shih Fu Chang, Feb. 13 th 2012 Lecture #4 Local Feature Matching Bag of Word image representation: coding and pooling (Many slides from A. Efors, W. Freeman, C. Kambhamettu,
EE 6882 Visual Search Engine Prof. Shih Fu Chang, Feb. 13 th 2012 Lecture #4 Local Feature Matching Bag of Word image representation: coding and pooling (Many slides from A. Efors, W. Freeman, C. Kambhamettu,
Interest Operators. All lectures are from posted research papers. Harris Corner Detector: the first and most basic interest operator
 Interest Operators All lectures are from posted research papers. Harris Corner Detector: the first and most basic interest operator SIFT interest point detector and region descriptor Kadir Entrop Detector
Interest Operators All lectures are from posted research papers. Harris Corner Detector: the first and most basic interest operator SIFT interest point detector and region descriptor Kadir Entrop Detector
Instance-level l recognition. Cordelia Schmid INRIA
 nstance-level l recognition Cordelia Schmid NRA nstance-level recognition Particular objects and scenes large databases Application Search photos on the web for particular places Find these landmars...in
nstance-level l recognition Cordelia Schmid NRA nstance-level recognition Particular objects and scenes large databases Application Search photos on the web for particular places Find these landmars...in
Lecture 13 Visual recognition
 Lecture 13 Visual recognition Announcements Silvio Savarese Lecture 13-20-Feb-14 Lecture 13 Visual recognition Object classification bag of words models Discriminative methods Generative methods Object
Lecture 13 Visual recognition Announcements Silvio Savarese Lecture 13-20-Feb-14 Lecture 13 Visual recognition Object classification bag of words models Discriminative methods Generative methods Object
Instance-level recognition: Local invariant features. Cordelia Schmid INRIA, Grenoble
 nstance-level recognition: ocal invariant features Cordelia Schmid NRA Grenoble Overview ntroduction to local features Harris interest points + SSD ZNCC SFT Scale & affine invariant interest point detectors
nstance-level recognition: ocal invariant features Cordelia Schmid NRA Grenoble Overview ntroduction to local features Harris interest points + SSD ZNCC SFT Scale & affine invariant interest point detectors
Taking derivative by convolution
 Taking derivative by convolution Partial derivatives with convolution For 2D function f(x,y), the partial derivative is: For discrete data, we can approximate using finite differences: To implement above
Taking derivative by convolution Partial derivatives with convolution For 2D function f(x,y), the partial derivative is: For discrete data, we can approximate using finite differences: To implement above
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil nfrastructure Eng. & Mgmt. Session 9- mage Detectors, Part Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering Lab e-mail:
CEE598 - Visual Sensing for Civil nfrastructure Eng. & Mgmt. Session 9- mage Detectors, Part Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering Lab e-mail:
SIFT: Scale Invariant Feature Transform
 1 SIFT: Scale Invariant Feature Transform With slides from Sebastian Thrun Stanford CS223B Computer Vision, Winter 2006 3 Pattern Recognition Want to find in here SIFT Invariances: Scaling Rotation Illumination
1 SIFT: Scale Invariant Feature Transform With slides from Sebastian Thrun Stanford CS223B Computer Vision, Winter 2006 3 Pattern Recognition Want to find in here SIFT Invariances: Scaling Rotation Illumination
CS 1674: Intro to Computer Vision. Final Review. Prof. Adriana Kovashka University of Pittsburgh December 7, 2016
 CS 1674: Intro to Computer Vision Final Review Prof. Adriana Kovashka University of Pittsburgh December 7, 2016 Final info Format: multiple-choice, true/false, fill in the blank, short answers, apply an
CS 1674: Intro to Computer Vision Final Review Prof. Adriana Kovashka University of Pittsburgh December 7, 2016 Final info Format: multiple-choice, true/false, fill in the blank, short answers, apply an
CS4495/6495 Introduction to Computer Vision. 8C-L3 Support Vector Machines
 CS4495/6495 Introduction to Computer Vision 8C-L3 Support Vector Machines Discriminative classifiers Discriminative classifiers find a division (surface) in feature space that separates the classes Several
CS4495/6495 Introduction to Computer Vision 8C-L3 Support Vector Machines Discriminative classifiers Discriminative classifiers find a division (surface) in feature space that separates the classes Several
Harris Corner Detector
 Multimedia Computing: Algorithms, Systems, and Applications: Feature Extraction By Dr. Yu Cao Department of Computer Science The University of Massachusetts Lowell Lowell, MA 01854, USA Part of the slides
Multimedia Computing: Algorithms, Systems, and Applications: Feature Extraction By Dr. Yu Cao Department of Computer Science The University of Massachusetts Lowell Lowell, MA 01854, USA Part of the slides
Edge Detection. Introduction to Computer Vision. Useful Mathematics Funcs. The bad news
 Edge Detection Introduction to Computer Vision CS / ECE 8B Thursday, April, 004 Edge detection (HO #5) Edge detection is a local area operator that seeks to find significant, meaningful changes in image
Edge Detection Introduction to Computer Vision CS / ECE 8B Thursday, April, 004 Edge detection (HO #5) Edge detection is a local area operator that seeks to find significant, meaningful changes in image
SIFT: SCALE INVARIANT FEATURE TRANSFORM BY DAVID LOWE
 SIFT: SCALE INVARIANT FEATURE TRANSFORM BY DAVID LOWE Overview Motivation of Work Overview of Algorithm Scale Space and Difference of Gaussian Keypoint Localization Orientation Assignment Descriptor Building
SIFT: SCALE INVARIANT FEATURE TRANSFORM BY DAVID LOWE Overview Motivation of Work Overview of Algorithm Scale Space and Difference of Gaussian Keypoint Localization Orientation Assignment Descriptor Building
Lecture 6: Edge Detection. CAP 5415: Computer Vision Fall 2008
 Lecture 6: Edge Detection CAP 5415: Computer Vision Fall 2008 Announcements PS 2 is available Please read it by Thursday During Thursday lecture, I will be going over it in some detail Monday - Computer
Lecture 6: Edge Detection CAP 5415: Computer Vision Fall 2008 Announcements PS 2 is available Please read it by Thursday During Thursday lecture, I will be going over it in some detail Monday - Computer
Image Filtering. Slides, adapted from. Steve Seitz and Rick Szeliski, U.Washington
 Image Filtering Slides, adapted from Steve Seitz and Rick Szeliski, U.Washington The power of blur All is Vanity by Charles Allen Gillbert (1873-1929) Harmon LD & JuleszB (1973) The recognition of faces.
Image Filtering Slides, adapted from Steve Seitz and Rick Szeliski, U.Washington The power of blur All is Vanity by Charles Allen Gillbert (1873-1929) Harmon LD & JuleszB (1973) The recognition of faces.
Overview. Harris interest points. Comparing interest points (SSD, ZNCC, SIFT) Scale & affine invariant interest points
 Scale & affine invariant interest points") Overview Harris interest points Comparing interest points (SSD, ZNCC, SIFT) Scale & affine invariant interest points Evaluation and comparison of different detectors Region descriptors and their performance
Overview Harris interest points Comparing interest points (SSD, ZNCC, SIFT) Scale & affine invariant interest points Evaluation and comparison of different detectors Region descriptors and their performance
Scale & Affine Invariant Interest Point Detectors
 Scale & Affine Invariant Interest Point Detectors Krystian Mikolajczyk and Cordelia Schmid Presented by Hunter Brown & Gaurav Pandey, February 19, 2009 Roadmap: Motivation Scale Invariant Detector Affine
Scale & Affine Invariant Interest Point Detectors Krystian Mikolajczyk and Cordelia Schmid Presented by Hunter Brown & Gaurav Pandey, February 19, 2009 Roadmap: Motivation Scale Invariant Detector Affine
The Kadir Operator Saliency, Scale and Image Description. Timor Kadir and Michael Brady University of Oxford
 The Kadir Operator Saliency, Scale and Image Description Timor Kadir and Michael Brady University of Oxford 1 The issues salient standing out from the rest, noticeable, conspicous, prominent scale find
The Kadir Operator Saliency, Scale and Image Description Timor Kadir and Michael Brady University of Oxford 1 The issues salient standing out from the rest, noticeable, conspicous, prominent scale find
PCA FACE RECOGNITION
 PCA FACE RECOGNITION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Shree Nayar (Columbia) including their own slides. Goal
PCA FACE RECOGNITION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Shree Nayar (Columbia) including their own slides. Goal
Instance-level l recognition. Cordelia Schmid & Josef Sivic INRIA
 nstance-level l recognition Cordelia Schmid & Josef Sivic NRA nstance-level recognition Particular objects and scenes large databases Application Search photos on the web for particular places Find these
nstance-level l recognition Cordelia Schmid & Josef Sivic NRA nstance-level recognition Particular objects and scenes large databases Application Search photos on the web for particular places Find these
Wavelet-based Salient Points with Scale Information for Classification
 Wavelet-based Salient Points with Scale Information for Classification Alexandra Teynor and Hans Burkhardt Department of Computer Science, Albert-Ludwigs-Universität Freiburg, Germany {teynor, Hans.Burkhardt}@informatik.uni-freiburg.de
Wavelet-based Salient Points with Scale Information for Classification Alexandra Teynor and Hans Burkhardt Department of Computer Science, Albert-Ludwigs-Universität Freiburg, Germany {teynor, Hans.Burkhardt}@informatik.uni-freiburg.de
Overview. Introduction to local features. Harris interest points + SSD, ZNCC, SIFT. Evaluation and comparison of different detectors
 Overview Introduction to local features Harris interest points + SSD, ZNCC, SIFT Scale & affine invariant interest point detectors Evaluation and comparison of different detectors Region descriptors and
Overview Introduction to local features Harris interest points + SSD, ZNCC, SIFT Scale & affine invariant interest point detectors Evaluation and comparison of different detectors Region descriptors and
SIFT keypoint detection. D. Lowe, Distinctive image features from scale-invariant keypoints, IJCV 60 (2), pp , 2004.
, pp , 2004.") SIFT keypoint detection D. Lowe, Distinctive image features from scale-invariant keypoints, IJCV 60 (), pp. 91-110, 004. Keypoint detection with scale selection We want to extract keypoints with characteristic
SIFT keypoint detection D. Lowe, Distinctive image features from scale-invariant keypoints, IJCV 60 (), pp. 91-110, 004. Keypoint detection with scale selection We want to extract keypoints with characteristic
Blob Detection CSC 767
 Blob Detection CSC 767 Blob detection Slides: S. Lazebnik Feature detection with scale selection We want to extract features with characteristic scale that is covariant with the image transformation Blob
Blob Detection CSC 767 Blob detection Slides: S. Lazebnik Feature detection with scale selection We want to extract features with characteristic scale that is covariant with the image transformation Blob
Instance-level recognition: Local invariant features. Cordelia Schmid INRIA, Grenoble
 nstance-level recognition: ocal invariant features Cordelia Schmid NRA Grenoble Overview ntroduction to local features Harris interest points + SSD ZNCC SFT Scale & affine invariant interest point detectors
nstance-level recognition: ocal invariant features Cordelia Schmid NRA Grenoble Overview ntroduction to local features Harris interest points + SSD ZNCC SFT Scale & affine invariant interest point detectors
Machine vision. Summary # 4. The mask for Laplacian is given
 1 Machine vision Summary # 4 The mask for Laplacian is given L = 0 1 0 1 4 1 (6) 0 1 0 Another Laplacian mask that gives more importance to the center element is L = 1 1 1 1 8 1 (7) 1 1 1 Note that the
1 Machine vision Summary # 4 The mask for Laplacian is given L = 0 1 0 1 4 1 (6) 0 1 0 Another Laplacian mask that gives more importance to the center element is L = 1 1 1 1 8 1 (7) 1 1 1 Note that the
Urban land use information retrieval based on scene classification of Google Street View images
 Urban land use information retrieval based on scene classification of Google Street View images Xiaojiang Li 1, Chuanrong Zhang 1 1 Department of Geography, University of Connecticut, Storrs Email: {xiaojiang.li;chuanrong.zhang}@uconn.edu
Urban land use information retrieval based on scene classification of Google Street View images Xiaojiang Li 1, Chuanrong Zhang 1 1 Department of Geography, University of Connecticut, Storrs Email: {xiaojiang.li;chuanrong.zhang}@uconn.edu
Machine vision, spring 2018 Summary 4
 Machine vision Summary # 4 The mask for Laplacian is given L = 4 (6) Another Laplacian mask that gives more importance to the center element is given by L = 8 (7) Note that the sum of the elements in the
Machine vision Summary # 4 The mask for Laplacian is given L = 4 (6) Another Laplacian mask that gives more importance to the center element is given by L = 8 (7) Note that the sum of the elements in the
Image Stitching II. Linda Shapiro CSE 455
 Image Stitching II Linda Shapiro CSE 455 RANSAC for Homography Initial Matched Points RANSAC for Homography Final Matched Points RANSAC for Homography Image Blending What s wrong? Feathering + 1 0 1 0
Image Stitching II Linda Shapiro CSE 455 RANSAC for Homography Initial Matched Points RANSAC for Homography Final Matched Points RANSAC for Homography Image Blending What s wrong? Feathering + 1 0 1 0
Computational Photography
 Computational Photography Si Lu Spring 208 http://web.cecs.pdx.edu/~lusi/cs50/cs50_computati onal_photography.htm 04/0/208 Last Time o Digital Camera History of Camera Controlling Camera o Photography
Computational Photography Si Lu Spring 208 http://web.cecs.pdx.edu/~lusi/cs50/cs50_computati onal_photography.htm 04/0/208 Last Time o Digital Camera History of Camera Controlling Camera o Photography
Overview. Introduction to local features. Harris interest points + SSD, ZNCC, SIFT. Evaluation and comparison of different detectors
 Overview Introduction to local features Harris interest points + SSD, ZNCC, SIFT Scale & affine invariant interest point detectors Evaluation and comparison of different detectors Region descriptors and
Overview Introduction to local features Harris interest points + SSD, ZNCC, SIFT Scale & affine invariant interest point detectors Evaluation and comparison of different detectors Region descriptors and
Video and Motion Analysis Computer Vision Carnegie Mellon University (Kris Kitani)
") Video and Motion Analysis 16-385 Computer Vision Carnegie Mellon University (Kris Kitani) Optical flow used for feature tracking on a drone Interpolated optical flow used for super slow-mo optical flow
Video and Motion Analysis 16-385 Computer Vision Carnegie Mellon University (Kris Kitani) Optical flow used for feature tracking on a drone Interpolated optical flow used for super slow-mo optical flow
SIFT, GLOH, SURF descriptors. Dipartimento di Sistemi e Informatica
 SIFT, GLOH, SURF descriptors Dipartimento di Sistemi e Informatica Invariant local descriptor: Useful for Object RecogniAon and Tracking. Robot LocalizaAon and Mapping. Image RegistraAon and SAtching.
SIFT, GLOH, SURF descriptors Dipartimento di Sistemi e Informatica Invariant local descriptor: Useful for Object RecogniAon and Tracking. Robot LocalizaAon and Mapping. Image RegistraAon and SAtching.
ECE Digital Image Processing and Introduction to Computer Vision. Outline
 2/9/7 ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 207. Recap Outline 2. Sharpening Filtering Illustration
2/9/7 ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 207. Recap Outline 2. Sharpening Filtering Illustration
Loss Functions and Optimization. Lecture 3-1
 Lecture 3: Loss Functions and Optimization Lecture 3-1 Administrative Assignment 1 is released: http://cs231n.github.io/assignments2017/assignment1/ Due Thursday April 20, 11:59pm on Canvas (Extending
Lecture 3: Loss Functions and Optimization Lecture 3-1 Administrative Assignment 1 is released: http://cs231n.github.io/assignments2017/assignment1/ Due Thursday April 20, 11:59pm on Canvas (Extending
SURF Features. Jacky Baltes Dept. of Computer Science University of Manitoba WWW:
 SURF Features Jacky Baltes Dept. of Computer Science University of Manitoba Email: jacky@cs.umanitoba.ca WWW: http://www.cs.umanitoba.ca/~jacky Salient Spatial Features Trying to find interest points Points
SURF Features Jacky Baltes Dept. of Computer Science University of Manitoba Email: jacky@cs.umanitoba.ca WWW: http://www.cs.umanitoba.ca/~jacky Salient Spatial Features Trying to find interest points Points
Scale & Affine Invariant Interest Point Detectors
 Scale & Affine Invariant Interest Point Detectors KRYSTIAN MIKOLAJCZYK AND CORDELIA SCHMID [2004] Shreyas Saxena Gurkirit Singh 23/11/2012 Introduction We are interested in finding interest points. What
Scale & Affine Invariant Interest Point Detectors KRYSTIAN MIKOLAJCZYK AND CORDELIA SCHMID [2004] Shreyas Saxena Gurkirit Singh 23/11/2012 Introduction We are interested in finding interest points. What
Orientation Map Based Palmprint Recognition
 Orientation Map Based Palmprint Recognition (BM) 45 Orientation Map Based Palmprint Recognition B. H. Shekar, N. Harivinod bhshekar@gmail.com, harivinodn@gmail.com India, Mangalore University, Department
Orientation Map Based Palmprint Recognition (BM) 45 Orientation Map Based Palmprint Recognition B. H. Shekar, N. Harivinod bhshekar@gmail.com, harivinodn@gmail.com India, Mangalore University, Department
Lecture 04 Image Filtering
 Institute of Informatics Institute of Neuroinformatics Lecture 04 Image Filtering Davide Scaramuzza 1 Lab Exercise 2 - Today afternoon Room ETH HG E 1.1 from 13:15 to 15:00 Work description: your first
Institute of Informatics Institute of Neuroinformatics Lecture 04 Image Filtering Davide Scaramuzza 1 Lab Exercise 2 - Today afternoon Room ETH HG E 1.1 from 13:15 to 15:00 Work description: your first
Edge Detection in Computer Vision Systems
 1 CS332 Visual Processing in Computer and Biological Vision Systems Edge Detection in Computer Vision Systems This handout summarizes much of the material on the detection and description of intensity
1 CS332 Visual Processing in Computer and Biological Vision Systems Edge Detection in Computer Vision Systems This handout summarizes much of the material on the detection and description of intensity
Filtering and Edge Detection
 Filtering and Edge Detection Local Neighborhoods Hard to tell anything from a single pixel Example: you see a reddish pixel. Is this the object s color? Illumination? Noise? The next step in order of complexity
Filtering and Edge Detection Local Neighborhoods Hard to tell anything from a single pixel Example: you see a reddish pixel. Is this the object s color? Illumination? Noise? The next step in order of complexity
Image Stitching II. Linda Shapiro EE/CSE 576
 Image Stitching II Linda Shapiro EE/CSE 576 RANSAC for Homography Initial Matched Points RANSAC for Homography Final Matched Points RANSAC for Homography Image Blending What s wrong? Feathering + 1 0 ramp
Image Stitching II Linda Shapiro EE/CSE 576 RANSAC for Homography Initial Matched Points RANSAC for Homography Final Matched Points RANSAC for Homography Image Blending What s wrong? Feathering + 1 0 ramp
Fantope Regularization in Metric Learning
 Fantope Regularization in Metric Learning CVPR 2014 Marc T. Law (LIP6, UPMC), Nicolas Thome (LIP6 - UPMC Sorbonne Universités), Matthieu Cord (LIP6 - UPMC Sorbonne Universités), Paris, France Introduction
Fantope Regularization in Metric Learning CVPR 2014 Marc T. Law (LIP6, UPMC), Nicolas Thome (LIP6 - UPMC Sorbonne Universités), Matthieu Cord (LIP6 - UPMC Sorbonne Universités), Paris, France Introduction
6.869 Advances in Computer Vision. Prof. Bill Freeman March 1, 2005
 6.869 Advances in Computer Vision Prof. Bill Freeman March 1 2005 1 2 Local Features Matching points across images important for: object identification instance recognition object class recognition pose
6.869 Advances in Computer Vision Prof. Bill Freeman March 1 2005 1 2 Local Features Matching points across images important for: object identification instance recognition object class recognition pose
Advanced Features. Advanced Features: Topics. Jana Kosecka. Slides from: S. Thurn, D. Lowe, Forsyth and Ponce. Advanced features and feature matching
 Advanced Features Jana Kosecka Slides from: S. Thurn, D. Lowe, Forsyth and Ponce Advanced Features: Topics Advanced features and feature matching Template matching SIFT features Haar features 2 1 Features
Advanced Features Jana Kosecka Slides from: S. Thurn, D. Lowe, Forsyth and Ponce Advanced Features: Topics Advanced features and feature matching Template matching SIFT features Haar features 2 1 Features
Scale-space image processing
 Scale-space image processing Corresponding image features can appear at different scales Like shift-invariance, scale-invariance of image processing algorithms is often desirable. Scale-space representation
Scale-space image processing Corresponding image features can appear at different scales Like shift-invariance, scale-invariance of image processing algorithms is often desirable. Scale-space representation
Edge Detection PSY 5018H: Math Models Hum Behavior, Prof. Paul Schrater, Spring 2005
 Edge Detection PSY 5018H: Math Models Hum Behavior, Prof. Paul Schrater, Spring 2005 Gradients and edges Points of sharp change in an image are interesting: change in reflectance change in object change
Edge Detection PSY 5018H: Math Models Hum Behavior, Prof. Paul Schrater, Spring 2005 Gradients and edges Points of sharp change in an image are interesting: change in reflectance change in object change
Lecture 7: Edge Detection
 #1 Lecture 7: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Definition of an Edge First Order Derivative Approximation as Edge Detector #2 This Lecture Examples of Edge Detection
#1 Lecture 7: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Definition of an Edge First Order Derivative Approximation as Edge Detector #2 This Lecture Examples of Edge Detection
Loss Functions and Optimization. Lecture 3-1
 Lecture 3: Loss Functions and Optimization Lecture 3-1 Administrative: Live Questions We ll use Zoom to take questions from remote students live-streaming the lecture Check Piazza for instructions and
Lecture 3: Loss Functions and Optimization Lecture 3-1 Administrative: Live Questions We ll use Zoom to take questions from remote students live-streaming the lecture Check Piazza for instructions and
Region Covariance: A Fast Descriptor for Detection and Classification
 MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Region Covariance: A Fast Descriptor for Detection and Classification Oncel Tuzel, Fatih Porikli, Peter Meer TR2005-111 May 2006 Abstract We
MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Region Covariance: A Fast Descriptor for Detection and Classification Oncel Tuzel, Fatih Porikli, Peter Meer TR2005-111 May 2006 Abstract We
CITS 4402 Computer Vision
 CITS 4402 Computer Vision A/Prof Ajmal Mian Adj/A/Prof Mehdi Ravanbakhsh Lecture 06 Object Recognition Objectives To understand the concept of image based object recognition To learn how to match images
CITS 4402 Computer Vision A/Prof Ajmal Mian Adj/A/Prof Mehdi Ravanbakhsh Lecture 06 Object Recognition Objectives To understand the concept of image based object recognition To learn how to match images
Instance-level recognition: Local invariant features. Cordelia Schmid INRIA, Grenoble
 nstance-level recognition: ocal invariant features Cordelia Schmid NRA Grenoble Overview ntroduction to local features Harris interest t points + SSD ZNCC SFT Scale & affine invariant interest point detectors
nstance-level recognition: ocal invariant features Cordelia Schmid NRA Grenoble Overview ntroduction to local features Harris interest t points + SSD ZNCC SFT Scale & affine invariant interest point detectors
Motion Estimation (I) Ce Liu Microsoft Research New England
 Ce Liu Microsoft Research New England") Motion Estimation (I) Ce Liu celiu@microsoft.com Microsoft Research New England We live in a moving world Perceiving, understanding and predicting motion is an important part of our daily lives Motion
Motion Estimation (I) Ce Liu celiu@microsoft.com Microsoft Research New England We live in a moving world Perceiving, understanding and predicting motion is an important part of our daily lives Motion
Face detection and recognition. Detection Recognition Sally
 Face detection and recognition Detection Recognition Sally Face detection & recognition Viola & Jones detector Available in open CV Face recognition Eigenfaces for face recognition Metric learning identification
Face detection and recognition Detection Recognition Sally Face detection & recognition Viola & Jones detector Available in open CV Face recognition Eigenfaces for face recognition Metric learning identification
Gaussian derivatives
 Gaussian derivatives UCU Winter School 2017 James Pritts Czech Tecnical University January 16, 2017 1 Images taken from Noah Snavely s and Robert Collins s course notes Definition An image (grayscale)
Gaussian derivatives UCU Winter School 2017 James Pritts Czech Tecnical University January 16, 2017 1 Images taken from Noah Snavely s and Robert Collins s course notes Definition An image (grayscale)
Shape of Gaussians as Feature Descriptors
 Shape of Gaussians as Feature Descriptors Liyu Gong, Tianjiang Wang and Fang Liu Intelligent and Distributed Computing Lab, School of Computer Science and Technology Huazhong University of Science and
Shape of Gaussians as Feature Descriptors Liyu Gong, Tianjiang Wang and Fang Liu Intelligent and Distributed Computing Lab, School of Computer Science and Technology Huazhong University of Science and
Extract useful building blocks: blobs. the same image like for the corners
 Extract useful building blocks: blobs the same image like for the corners Here were the corners... Blob detection in 2D Laplacian of Gaussian: Circularly symmetric operator for blob detection in 2D 2 g=
Extract useful building blocks: blobs the same image like for the corners Here were the corners... Blob detection in 2D Laplacian of Gaussian: Circularly symmetric operator for blob detection in 2D 2 g=
Reading. 3. Image processing. Pixel movement. Image processing Y R I G Q
 Reading Jain, Kasturi, Schunck, Machine Vision. McGraw-Hill, 1995. Sections 4.-4.4, 4.5(intro), 4.5.5, 4.5.6, 5.1-5.4. 3. Image processing 1 Image processing An image processing operation typically defines
Reading Jain, Kasturi, Schunck, Machine Vision. McGraw-Hill, 1995. Sections 4.-4.4, 4.5(intro), 4.5.5, 4.5.6, 5.1-5.4. 3. Image processing 1 Image processing An image processing operation typically defines
Single Exposure Enhancement and Reconstruction. Some slides are from: J. Kosecka, Y. Chuang, A. Efros, C. B. Owen, W. Freeman
 Single Exposure Enhancement and Reconstruction Some slides are from: J. Kosecka, Y. Chuang, A. Efros, C. B. Owen, W. Freeman 1 Reconstruction as an Inverse Problem Original image f Distortion & Sampling
Single Exposure Enhancement and Reconstruction Some slides are from: J. Kosecka, Y. Chuang, A. Efros, C. B. Owen, W. Freeman 1 Reconstruction as an Inverse Problem Original image f Distortion & Sampling
Review Smoothing Spatial Filters Sharpening Spatial Filters. Spatial Filtering. Dr. Praveen Sankaran. Department of ECE NIT Calicut.
 Spatial Filtering Dr. Praveen Sankaran Department of ECE NIT Calicut January 7, 203 Outline 2 Linear Nonlinear 3 Spatial Domain Refers to the image plane itself. Direct manipulation of image pixels. Figure:
Spatial Filtering Dr. Praveen Sankaran Department of ECE NIT Calicut January 7, 203 Outline 2 Linear Nonlinear 3 Spatial Domain Refers to the image plane itself. Direct manipulation of image pixels. Figure:
Image Processing 1 (IP1) Bildverarbeitung 1
 Bildverarbeitung 1") MIN-Fakultät Fachbereich Informatik Arbeitsbereich SAV/BV KOGS Image Processing 1 IP1 Bildverarbeitung 1 Lecture : Object Recognition Winter Semester 015/16 Slides: Prof. Bernd Neumann Slightly revised
MIN-Fakultät Fachbereich Informatik Arbeitsbereich SAV/BV KOGS Image Processing 1 IP1 Bildverarbeitung 1 Lecture : Object Recognition Winter Semester 015/16 Slides: Prof. Bernd Neumann Slightly revised
Discriminative part-based models. Many slides based on P. Felzenszwalb
 More sliding window detection: ti Discriminative part-based models Many slides based on P. Felzenszwalb Challenge: Generic object detection Pedestrian detection Features: Histograms of oriented gradients
More sliding window detection: ti Discriminative part-based models Many slides based on P. Felzenszwalb Challenge: Generic object detection Pedestrian detection Features: Histograms of oriented gradients
Modeling Mutual Context of Object and Human Pose in Human-Object Interaction Activities
 Modeling Mutual Context of Object and Human Pose in Human-Object Interaction Activities Bangpeng Yao and Li Fei-Fei Computer Science Department, Stanford University {bangpeng,feifeili}@cs.stanford.edu
Modeling Mutual Context of Object and Human Pose in Human-Object Interaction Activities Bangpeng Yao and Li Fei-Fei Computer Science Department, Stanford University {bangpeng,feifeili}@cs.stanford.edu
Photo Tourism and im2gps: 3D Reconstruction and Geolocation of Internet Photo Collections Part II
 Photo Tourism and im2gps: 3D Reconstruction and Geolocation of Internet Photo Collections Part II Noah Snavely Cornell James Hays CMU MIT (Fall 2009) Brown (Spring 2010 ) Complexity of the Visual World
Photo Tourism and im2gps: 3D Reconstruction and Geolocation of Internet Photo Collections Part II Noah Snavely Cornell James Hays CMU MIT (Fall 2009) Brown (Spring 2010 ) Complexity of the Visual World
DISCRIMINATIVE DECORELATION FOR CLUSTERING AND CLASSIFICATION
 DISCRIMINATIVE DECORELATION FOR CLUSTERING AND CLASSIFICATION ECCV 12 Bharath Hariharan, Jitandra Malik, and Deva Ramanan MOTIVATION State-of-the-art Object Detection HOG Linear SVM Dalal&Triggs Histograms
DISCRIMINATIVE DECORELATION FOR CLUSTERING AND CLASSIFICATION ECCV 12 Bharath Hariharan, Jitandra Malik, and Deva Ramanan MOTIVATION State-of-the-art Object Detection HOG Linear SVM Dalal&Triggs Histograms