CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
|
|
|
- Magdalen Thornton
- 5 years ago
- Views:
Transcription
1 CEE598 - Visual Sensing for Civil nfrastructure Eng. & Mgmt. Session 9- mage Detectors, Part Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering Lab mgolpar@illinois.edu Department of Civil and Environmental Engineering, Universit of llinois at Urbana-Champaign
2 Outline mage Detectors, Part Edge feature detectors Corner feature detectors Reading: [FP] Chapters 8,9 Some slides in this lecture are courtes to Prof. S. Savarese, prof F. Li, prof S. Lazebnik, and various other lecturers 2
3 Goal dentif interesting regions from the images (edges, corners, blobs ) Descriptors e.g. SFT Matching / ndeing / Recognition 3
4 Linear filtering Convolution: (f g)[m,n] f[k,l] g[m k,n l] k,l Smoothing Differentiation 4


5 Smoothing with a Gaussian Weight contributions of neighboring piels b nearness , = 1 Constant factor at front makes volume sum to 1 (can be ignored, as we should normalize weights to sum to 1 in an case). 5 Slide credit: Christopher Rasmussen


6 Smoothing with a Gaussian 6


7 Edge Detection 7

8 What causes an edge? dentifies sudden changes in an image Depth discontinuit Surface orientation discontinuit Reflectance discontinuit (i.e., change in surface material properties) llumination discontinuit (e.g., shadow) 8
9 Edge Detection Criteria for optimal edge detection (Cann 86): Good detection accurac: minimize the probabilit of false positives (detecting spurious edges caused b noise), false negatives (missing real edges) Good localization: edges must be detected as close as possible to the true edges. Single response constraint: minimize the number of local maima around the true edge (i.e. detector must return single point for each true edge point) 9
10 Edge Detection Eamples: True edge Poor robustness to noise Poor localization Too man responses 10
11 Designing an edge detector Edge: a location with high gradient (thus, use derivatives) Need two derivatives, in and direction. Need smoothing to reduce noise prior to taking derivative 11
12 f g f * g d d ( f g) Source: S. Seitz derivative of Gaussian filter 12
13 Cann Edge Detection Most widel used edge detector in computer vision. First derivative of the Gaussian closel approimates the operator that optimizes the product of signal-to-noise ratio and localization. 15
14 Cann Edge Detection Steps: 1. Gaussian smoothing 2. & Derivative = Derivative of Gaussian 3. Find magnitude and orientation of gradient 4. Etract edge points: Non-maimum suppression 5. Linking and thresholding Hsteresis : Matlab: edge(, cann ) 16
15 Cann Edge Detector- First 2 Steps Smoothing 17 ) g(, ' ), ( e g g g S g g g g g g g g g Derivative


 g(, )")
16 Cann Edge Detector Derivative of Gaussian g (, ) g(, ) g (, ) 18


17 Cann Edge Detector- First 2 Steps S S S g g S S S = gradient vector 19



18 ncreased smoothing: Eliminates noise edges. Makes edges smoother and thicker. Removes fine detail. 20
 direction tan 1 S S image gradient magnitude")
19 Cann Edge Detector- Third Step magnitude and direction of S S S magnitude (S 2 S 2 ) direction tan 1 S S image gradient magnitude 21
20 Cann Edge Detector - Fourth Step Non maimum suppression 22
21 Cann Edge Detector - Fourth Step 1. nitialize: - Slice gradient magnitude along the gradient direction - Mark the point along the slide where the magnitude is ma 2. Propagate chain from current point: - Predict net points using the normal to the gradient at that point - Find which point is a local ma magnitude in gradient direction - Retain in magnitude > T 23

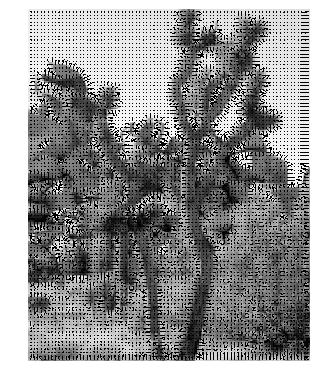
22 Eample: Non-maimum depression Original image Gradient magnitude courtes of G. Lo Non-maima suppressed Slide credit: Christopher Rasmussen 24
23 Cann Edge Detector - Step 5: Thresholding Set a threshold T to suppress gradients with magnitude < T 25
 26")
24 high threshold (strong edges) low threshold (weak edges) 26
25 Cann Edge Detector Step 5: Hsteresis Thresholding Hsteresis: A lag or momentum factor dea: Maintain two thresholds k high and k low Use k high to find strong edges to start edge chain Use k low to find weak edges along the edge chain Tpical ratio of thresholds is roughl k high / k low = 2 27

26 hsteresis threshold 28
 original Cann with")


27 29 Effect of (Gaussian kernel spread/size) original Cann with Cann with The choice of depends on desired behavior large detects large scale edges small detects fine features 29 Source: S. Seitz
28 30 Demo 30
29 Other edge detectors: Sobel Cann-Deriche Differential 31
30 Etract useful building blocks: Corners 32


31 Etract useful building blocks: blobs 33
32 Characteristics Repeatabilit The same feature can be found in several images despite geometric and photometric transformations Salienc Each feature is found at an interesting region of the image Localit A feature occupies a relativel small area of the image; 34



33 Repeatabilit llumination invariance Scale invariance Pose invariance Rotation Affine 35
34 Salienc Localit 36
35 Harris corner detector C.Harris and M.Stephens. "A Combined Corner and Edge Detector. Proceedings of the 4th Alve Vision Conference: pages
36 Harris Detector: Basic dea Eplore intensit changes within a window as the window changes location flat region: no change in all directions edge : no change along the edge direction corner : significant change in all directions 38
37 Harris Detector: Mathematics Change of intensit for the shift [u,v ]:, Proportional to the gradient 2 E( u, v) w(, ) ( u, v) (, ) Window function Shifted intensit ntensit Window function w(,) = or 1 in window, 0 outside Gaussian 39
38 Harris Detector: Mathematics For small shifts [u,v ] we have a bilinear approimation: u E( u, v) u, v M v where M is a 22 matri computed from image derivatives: M 2 w(, ) 2, W W 2 W W 2 40
39 2 2 W W W W M Sum over a small region around the hpothetical corner (we can omit w ) Gradient with respect to, times gradient with respect to Matri is smmetric Slide credit: David Jacobs g g Second-moment matri 41
40 2 2 M First, consider case where dominant gradient directions aligned with or Second-moment matri 42
41 2 2 M First, consider case where dominant gradient directions aligned with or f either λ is close to 0, then this is an edge Second-moment matri 43 analzing the eigenvalues of A Structure tensor
42 2 2 M First, consider case where dominant gradient directions aligned with or f both λs are close to 0, then this is a flat region Second-moment matri 44
43 2 2 M For generic window alignments, the eigenvalue decomposition of M returns similar information: U 0 0 U Lambda 1, 2 are the eigenvalues of M Second-moment matri 45
44 2 2 M For generic window alignments, the eigenvalue decomposition of M returns similar information: U 0 0 U Non-zero eigenvector of M gives direction of the edge f either λ is close to 0, then this is an edge Second-moment matri 46
45 Harris Detector: Mathematics Classification of image points using eigenvalues of M: 2 Edge 2 >> 1 Corner 1 and 2 are large, 1 ~ 2 ; E increases in all directions 1 and 2 are small; E is almost constant in all directions Flat region Edge 1 >>

46 48
47 49
48 Harris Detector: Mathematics Measure of corner response: R det M k M trace 2 det M trace M (k empirical constant, k = ) 50
49 Harris Detector: Algorithm Filter image with Gaussian to reduce noise Compute magnitude of the and gradients at each piel Construct M in a window around each piel (Harris uses a Gaussian window) Compute s of M Compute f R> T a corner is detected; retain point of local maima R det M k M trace 2 51
50 Harris Detector: Mathematics R depends onl on eigenvalues of M 2 Edge R < 0 Corner R is large for a corner R > 0 R is negative with large magnitude for an edge R is small for a flat region Flat Edge R small R <

51 Harris Detector: Workflow 53

52 Harris Detector: Workflow Compute corner response R 54

53 Harris Detector: Workflow Find points with large corner response: R>threshold 55

54 Harris Detector: Workflow Take onl the points of local maima of R 56
55 Harris Detector: Workflow 57
56 Harris Detector: Some Properties Rotation invariance Corner response R is invariant to image rotation C 0 11 U U 0 2 R = R( 1, 1 ) doesn t change! 58
57 Harris Detector: Some Properties But: non-invariant to image scale! All points will be classified as edges Corner! 59
58 Harris Detector: Some Properties Partial invariance to affine intensit change invariance to intensit shift + b (wh?) (onl derivatives are used) ntensit scale: a R threshold R (image coordinate) (image coordinate) 60
59 Net lecture: Descriptors Detectors part 2 61
Keypoint extraction: Corners Harris Corners Pkwy, Charlotte, NC
 Kepoint etraction: Corners 9300 Harris Corners Pkw Charlotte NC Wh etract kepoints? Motivation: panorama stitching We have two images how do we combine them? Wh etract kepoints? Motivation: panorama stitching
Kepoint etraction: Corners 9300 Harris Corners Pkw Charlotte NC Wh etract kepoints? Motivation: panorama stitching We have two images how do we combine them? Wh etract kepoints? Motivation: panorama stitching
Instance-level l recognition. Cordelia Schmid INRIA
 nstance-level l recognition Cordelia Schmid NRA nstance-level recognition Particular objects and scenes large databases Application Search photos on the web for particular places Find these landmars...in
nstance-level l recognition Cordelia Schmid NRA nstance-level recognition Particular objects and scenes large databases Application Search photos on the web for particular places Find these landmars...in
Instance-level recognition: Local invariant features. Cordelia Schmid INRIA, Grenoble
 nstance-level recognition: ocal invariant features Cordelia Schmid NRA Grenoble Overview ntroduction to local features Harris interest points + SSD ZNCC SFT Scale & affine invariant interest point detectors
nstance-level recognition: ocal invariant features Cordelia Schmid NRA Grenoble Overview ntroduction to local features Harris interest points + SSD ZNCC SFT Scale & affine invariant interest point detectors
Feature extraction: Corners and blobs
 Feature extraction: Corners and blobs Review: Linear filtering and edge detection Name two different kinds of image noise Name a non-linear smoothing filter What advantages does median filtering have over
Feature extraction: Corners and blobs Review: Linear filtering and edge detection Name two different kinds of image noise Name a non-linear smoothing filter What advantages does median filtering have over
Instance-level recognition: Local invariant features. Cordelia Schmid INRIA, Grenoble
 nstance-level recognition: ocal invariant features Cordelia Schmid NRA Grenoble Overview ntroduction to local features Harris interest points + SSD ZNCC SFT Scale & affine invariant interest point detectors
nstance-level recognition: ocal invariant features Cordelia Schmid NRA Grenoble Overview ntroduction to local features Harris interest points + SSD ZNCC SFT Scale & affine invariant interest point detectors
Edges and Scale. Image Features. Detecting edges. Origin of Edges. Solution: smooth first. Effects of noise
 Edges and Scale Image Features From Sandlot Science Slides revised from S. Seitz, R. Szeliski, S. Lazebnik, etc. Origin of Edges surface normal discontinuity depth discontinuity surface color discontinuity
Edges and Scale Image Features From Sandlot Science Slides revised from S. Seitz, R. Szeliski, S. Lazebnik, etc. Origin of Edges surface normal discontinuity depth discontinuity surface color discontinuity
Instance-level recognition: Local invariant features. Cordelia Schmid INRIA, Grenoble
 nstance-level recognition: ocal invariant features Cordelia Schmid NRA Grenoble Overview ntroduction to local features Harris interest t points + SSD ZNCC SFT Scale & affine invariant interest point detectors
nstance-level recognition: ocal invariant features Cordelia Schmid NRA Grenoble Overview ntroduction to local features Harris interest t points + SSD ZNCC SFT Scale & affine invariant interest point detectors
Lecture 05 Point Feature Detection and Matching
 nstitute of nformatics nstitute of Neuroinformatics Lecture 05 Point Feature Detection and Matching Davide Scaramuzza 1 Lab Eercise 3 - Toda afternoon Room ETH HG E 1.1 from 13:15 to 15:00 Wor description:
nstitute of nformatics nstitute of Neuroinformatics Lecture 05 Point Feature Detection and Matching Davide Scaramuzza 1 Lab Eercise 3 - Toda afternoon Room ETH HG E 1.1 from 13:15 to 15:00 Wor description:
Perception III: Filtering, Edges, and Point-features
 Perception : Filtering, Edges, and Point-features Davide Scaramuzza Universit of Zurich Margarita Chli, Paul Furgale, Marco Hutter, Roland Siegwart 1 Toda s outline mage filtering Smoothing Edge detection
Perception : Filtering, Edges, and Point-features Davide Scaramuzza Universit of Zurich Margarita Chli, Paul Furgale, Marco Hutter, Roland Siegwart 1 Toda s outline mage filtering Smoothing Edge detection
Feature extraction: Corners and blobs
 Featre etraction: Corners and blobs Wh etract featres? Motiation: panorama stitching We hae two images how do we combine them? Wh etract featres? Motiation: panorama stitching We hae two images how do
Featre etraction: Corners and blobs Wh etract featres? Motiation: panorama stitching We hae two images how do we combine them? Wh etract featres? Motiation: panorama stitching We hae two images how do
Recap: edge detection. Source: D. Lowe, L. Fei-Fei
 Recap: edge detection Source: D. Lowe, L. Fei-Fei Canny edge detector 1. Filter image with x, y derivatives of Gaussian 2. Find magnitude and orientation of gradient 3. Non-maximum suppression: Thin multi-pixel
Recap: edge detection Source: D. Lowe, L. Fei-Fei Canny edge detector 1. Filter image with x, y derivatives of Gaussian 2. Find magnitude and orientation of gradient 3. Non-maximum suppression: Thin multi-pixel
Instance-level l recognition. Cordelia Schmid & Josef Sivic INRIA
 nstance-level l recognition Cordelia Schmid & Josef Sivic NRA nstance-level recognition Particular objects and scenes large databases Application Search photos on the web for particular places Find these
nstance-level l recognition Cordelia Schmid & Josef Sivic NRA nstance-level recognition Particular objects and scenes large databases Application Search photos on the web for particular places Find these
Corners, Blobs & Descriptors. With slides from S. Lazebnik & S. Seitz, D. Lowe, A. Efros
 Corners, Blobs & Descriptors With slides from S. Lazebnik & S. Seitz, D. Lowe, A. Efros Motivation: Build a Panorama M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 How do we build panorama?
Corners, Blobs & Descriptors With slides from S. Lazebnik & S. Seitz, D. Lowe, A. Efros Motivation: Build a Panorama M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 How do we build panorama?
Properties of detectors Edge detectors Harris DoG Properties of descriptors SIFT HOG Shape context
 Lecture 10 Detectors and descriptors Properties of detectors Edge detectors Harris DoG Properties of descriptors SIFT HOG Shape context Silvio Savarese Lecture 10-16-Feb-15 From the 3D to 2D & vice versa
Lecture 10 Detectors and descriptors Properties of detectors Edge detectors Harris DoG Properties of descriptors SIFT HOG Shape context Silvio Savarese Lecture 10-16-Feb-15 From the 3D to 2D & vice versa
CS4670: Computer Vision Kavita Bala. Lecture 7: Harris Corner Detec=on
 CS4670: Computer Vision Kavita Bala Lecture 7: Harris Corner Detec=on Announcements HW 1 will be out soon Sign up for demo slots for PA 1 Remember that both partners have to be there We will ask you to
CS4670: Computer Vision Kavita Bala Lecture 7: Harris Corner Detec=on Announcements HW 1 will be out soon Sign up for demo slots for PA 1 Remember that both partners have to be there We will ask you to
Feature detectors and descriptors. Fei-Fei Li
 Feature detectors and descriptors Fei-Fei Li Feature Detection e.g. DoG detected points (~300) coordinates, neighbourhoods Feature Description e.g. SIFT local descriptors (invariant) vectors database of
Feature detectors and descriptors Fei-Fei Li Feature Detection e.g. DoG detected points (~300) coordinates, neighbourhoods Feature Description e.g. SIFT local descriptors (invariant) vectors database of
Detectors part II Descriptors
 EECS 442 Computer vision Detectors part II Descriptors Blob detectors Invariance Descriptors Some slides of this lectures are courtesy of prof F. Li, prof S. Lazebnik, and various other lecturers Goal:
EECS 442 Computer vision Detectors part II Descriptors Blob detectors Invariance Descriptors Some slides of this lectures are courtesy of prof F. Li, prof S. Lazebnik, and various other lecturers Goal:
Feature detectors and descriptors. Fei-Fei Li
 Feature detectors and descriptors Fei-Fei Li Feature Detection e.g. DoG detected points (~300) coordinates, neighbourhoods Feature Description e.g. SIFT local descriptors (invariant) vectors database of
Feature detectors and descriptors Fei-Fei Li Feature Detection e.g. DoG detected points (~300) coordinates, neighbourhoods Feature Description e.g. SIFT local descriptors (invariant) vectors database of
Lecture 8: Interest Point Detection. Saad J Bedros
 #1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Review of Edge Detectors #2 Today s Lecture Interest Points Detection What do we mean with Interest Point Detection in an Image Goal:
#1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Review of Edge Detectors #2 Today s Lecture Interest Points Detection What do we mean with Interest Point Detection in an Image Goal:
Image Analysis. Feature extraction: corners and blobs
 Image Analysis Feature extraction: corners and blobs Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Svetlana Lazebnik, University of North Carolina at Chapel Hill (http://www.cs.unc.edu/~lazebnik/spring10/).
Image Analysis Feature extraction: corners and blobs Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Svetlana Lazebnik, University of North Carolina at Chapel Hill (http://www.cs.unc.edu/~lazebnik/spring10/).
6.869 Advances in Computer Vision. Prof. Bill Freeman March 1, 2005
 6.869 Advances in Computer Vision Prof. Bill Freeman March 1 2005 1 2 Local Features Matching points across images important for: object identification instance recognition object class recognition pose
6.869 Advances in Computer Vision Prof. Bill Freeman March 1 2005 1 2 Local Features Matching points across images important for: object identification instance recognition object class recognition pose
Lecture 8: Interest Point Detection. Saad J Bedros
 #1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Last Lecture : Edge Detection Preprocessing of image is desired to eliminate or at least minimize noise effects There is always tradeoff
#1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Last Lecture : Edge Detection Preprocessing of image is desired to eliminate or at least minimize noise effects There is always tradeoff
Advances in Computer Vision. Prof. Bill Freeman. Image and shape descriptors. Readings: Mikolajczyk and Schmid; Belongie et al.
 6.869 Advances in Computer Vision Prof. Bill Freeman March 3, 2005 Image and shape descriptors Affine invariant features Comparison of feature descriptors Shape context Readings: Mikolajczyk and Schmid;
6.869 Advances in Computer Vision Prof. Bill Freeman March 3, 2005 Image and shape descriptors Affine invariant features Comparison of feature descriptors Shape context Readings: Mikolajczyk and Schmid;
Interest Operators. All lectures are from posted research papers. Harris Corner Detector: the first and most basic interest operator
 Interest Operators All lectures are from posted research papers. Harris Corner Detector: the first and most basic interest operator SIFT interest point detector and region descriptor Kadir Entrop Detector
Interest Operators All lectures are from posted research papers. Harris Corner Detector: the first and most basic interest operator SIFT interest point detector and region descriptor Kadir Entrop Detector
Blob Detection CSC 767
 Blob Detection CSC 767 Blob detection Slides: S. Lazebnik Feature detection with scale selection We want to extract features with characteristic scale that is covariant with the image transformation Blob
Blob Detection CSC 767 Blob detection Slides: S. Lazebnik Feature detection with scale selection We want to extract features with characteristic scale that is covariant with the image transformation Blob
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 8- Linear Filters From Spatial Domain to Frequency Domain Mani Golparvar-Fard Department of Civil and Environmental Engineering 329D,
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 8- Linear Filters From Spatial Domain to Frequency Domain Mani Golparvar-Fard Department of Civil and Environmental Engineering 329D,
Blobs & Scale Invariance
 Blobs & Scale Invariance Prof. Didier Stricker Doz. Gabriele Bleser Computer Vision: Object and People Tracking With slides from Bebis, S. Lazebnik & S. Seitz, D. Lowe, A. Efros 1 Apertizer: some videos
Blobs & Scale Invariance Prof. Didier Stricker Doz. Gabriele Bleser Computer Vision: Object and People Tracking With slides from Bebis, S. Lazebnik & S. Seitz, D. Lowe, A. Efros 1 Apertizer: some videos
Lecture 6: Finding Features (part 1/2)
") Lecture 6: Finding Features (part 1/2) Professor Fei- Fei Li Stanford Vision Lab Lecture 6 -! 1 What we will learn today? Local invariant features MoHvaHon Requirements, invariances Keypoint localizahon
Lecture 6: Finding Features (part 1/2) Professor Fei- Fei Li Stanford Vision Lab Lecture 6 -! 1 What we will learn today? Local invariant features MoHvaHon Requirements, invariances Keypoint localizahon
Image Processing 1 (IP1) Bildverarbeitung 1
 Bildverarbeitung 1") MIN-Fakultät Fachbereich Informatik Arbeitsbereich SAV/BV KOGS Image Processing 1 IP1 Bildverarbeitung 1 Lecture : Object Recognition Winter Semester 015/16 Slides: Prof. Bernd Neumann Slightly revised
MIN-Fakultät Fachbereich Informatik Arbeitsbereich SAV/BV KOGS Image Processing 1 IP1 Bildverarbeitung 1 Lecture : Object Recognition Winter Semester 015/16 Slides: Prof. Bernd Neumann Slightly revised
CSE 473/573 Computer Vision and Image Processing (CVIP)
") CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Lecture 11 Local Features 1 Schedule Last class We started local features Today More on local features Readings for
CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Lecture 11 Local Features 1 Schedule Last class We started local features Today More on local features Readings for
CS 3710: Visual Recognition Describing Images with Features. Adriana Kovashka Department of Computer Science January 8, 2015
 CS 3710: Visual Recognition Describing Images with Features Adriana Kovashka Department of Computer Science January 8, 2015 Plan for Today Presentation assignments + schedule changes Image filtering Feature
CS 3710: Visual Recognition Describing Images with Features Adriana Kovashka Department of Computer Science January 8, 2015 Plan for Today Presentation assignments + schedule changes Image filtering Feature
* h + = Lec 05: Interesting Points Detection. Image Analysis & Retrieval. Outline. Image Filtering. Recap of Lec 04 Image Filtering Edge Features
 age Analsis & Retrieval Outline CS/EE 5590 Special Topics (Class ds: 44873, 44874) Fall 06, M/W 4-5:5p@Bloch 00 Lec 05: nteresting Points Detection Recap of Lec 04 age Filtering Edge Features Hoework Harris
age Analsis & Retrieval Outline CS/EE 5590 Special Topics (Class ds: 44873, 44874) Fall 06, M/W 4-5:5p@Bloch 00 Lec 05: nteresting Points Detection Recap of Lec 04 age Filtering Edge Features Hoework Harris
SURF Features. Jacky Baltes Dept. of Computer Science University of Manitoba WWW:
 SURF Features Jacky Baltes Dept. of Computer Science University of Manitoba Email: jacky@cs.umanitoba.ca WWW: http://www.cs.umanitoba.ca/~jacky Salient Spatial Features Trying to find interest points Points
SURF Features Jacky Baltes Dept. of Computer Science University of Manitoba Email: jacky@cs.umanitoba.ca WWW: http://www.cs.umanitoba.ca/~jacky Salient Spatial Features Trying to find interest points Points
Motion estimation. Digital Visual Effects Yung-Yu Chuang. with slides by Michael Black and P. Anandan
 Motion estimation Digital Visual Effects Yung-Yu Chuang with slides b Michael Black and P. Anandan Motion estimation Parametric motion image alignment Tracking Optical flow Parametric motion direct method
Motion estimation Digital Visual Effects Yung-Yu Chuang with slides b Michael Black and P. Anandan Motion estimation Parametric motion image alignment Tracking Optical flow Parametric motion direct method
Lecture 7: Edge Detection
 #1 Lecture 7: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Definition of an Edge First Order Derivative Approximation as Edge Detector #2 This Lecture Examples of Edge Detection
#1 Lecture 7: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Definition of an Edge First Order Derivative Approximation as Edge Detector #2 This Lecture Examples of Edge Detection
Corner detection: the basic idea
 Corner detection: the basic idea At a corner, shifting a window in any direction should give a large change in intensity flat region: no change in all directions edge : no change along the edge direction
Corner detection: the basic idea At a corner, shifting a window in any direction should give a large change in intensity flat region: no change in all directions edge : no change along the edge direction
Extract useful building blocks: blobs. the same image like for the corners
 Extract useful building blocks: blobs the same image like for the corners Here were the corners... Blob detection in 2D Laplacian of Gaussian: Circularly symmetric operator for blob detection in 2D 2 g=
Extract useful building blocks: blobs the same image like for the corners Here were the corners... Blob detection in 2D Laplacian of Gaussian: Circularly symmetric operator for blob detection in 2D 2 g=
Templates, Image Pyramids, and Filter Banks
 Templates, Image Pyramids, and Filter Banks 09/9/ Computer Vision James Hays, Brown Slides: Hoiem and others Review. Match the spatial domain image to the Fourier magnitude image 2 3 4 5 B A C D E Slide:
Templates, Image Pyramids, and Filter Banks 09/9/ Computer Vision James Hays, Brown Slides: Hoiem and others Review. Match the spatial domain image to the Fourier magnitude image 2 3 4 5 B A C D E Slide:
Lecture 12. Local Feature Detection. Matching with Invariant Features. Why extract features? Why extract features? Why extract features?
 Lecture 1 Why extract eatures? Motivation: panorama stitching We have two images how do we combine them? Local Feature Detection Guest lecturer: Alex Berg Reading: Harris and Stephens David Lowe IJCV We
Lecture 1 Why extract eatures? Motivation: panorama stitching We have two images how do we combine them? Local Feature Detection Guest lecturer: Alex Berg Reading: Harris and Stephens David Lowe IJCV We
Edge Detection. Image Processing - Computer Vision
 Image Processing - Lesson 10 Edge Detection Image Processing - Computer Vision Low Level Edge detection masks Gradient Detectors Compass Detectors Second Derivative - Laplace detectors Edge Linking Image
Image Processing - Lesson 10 Edge Detection Image Processing - Computer Vision Low Level Edge detection masks Gradient Detectors Compass Detectors Second Derivative - Laplace detectors Edge Linking Image
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely Lecture 5: Feature descriptors and matching Szeliski: 4.1 Reading Announcements Project 1 Artifacts due tomorrow, Friday 2/17, at 11:59pm Project 2 will be released
CS5670: Computer Vision Noah Snavely Lecture 5: Feature descriptors and matching Szeliski: 4.1 Reading Announcements Project 1 Artifacts due tomorrow, Friday 2/17, at 11:59pm Project 2 will be released
Computer Vision & Digital Image Processing
 Computer Vision & Digital Image Processing Image Segmentation Dr. D. J. Jackson Lecture 6- Image segmentation Segmentation divides an image into its constituent parts or objects Level of subdivision depends
Computer Vision & Digital Image Processing Image Segmentation Dr. D. J. Jackson Lecture 6- Image segmentation Segmentation divides an image into its constituent parts or objects Level of subdivision depends
Lecture 6: Edge Detection. CAP 5415: Computer Vision Fall 2008
 Lecture 6: Edge Detection CAP 5415: Computer Vision Fall 2008 Announcements PS 2 is available Please read it by Thursday During Thursday lecture, I will be going over it in some detail Monday - Computer
Lecture 6: Edge Detection CAP 5415: Computer Vision Fall 2008 Announcements PS 2 is available Please read it by Thursday During Thursday lecture, I will be going over it in some detail Monday - Computer
Invariant local features. Invariant Local Features. Classes of transformations. (Good) invariant local features. Case study: panorama stitching
 invariant local features. Case study: panorama stitching") Invariant local eatures Invariant Local Features Tuesday, February 6 Subset o local eature types designed to be invariant to Scale Translation Rotation Aine transormations Illumination 1) Detect distinctive
Invariant local eatures Invariant Local Features Tuesday, February 6 Subset o local eature types designed to be invariant to Scale Translation Rotation Aine transormations Illumination 1) Detect distinctive
Optical flow. Subhransu Maji. CMPSCI 670: Computer Vision. October 20, 2016
 Optical flow Subhransu Maji CMPSC 670: Computer Vision October 20, 2016 Visual motion Man slides adapted from S. Seitz, R. Szeliski, M. Pollefes CMPSC 670 2 Motion and perceptual organization Sometimes,
Optical flow Subhransu Maji CMPSC 670: Computer Vision October 20, 2016 Visual motion Man slides adapted from S. Seitz, R. Szeliski, M. Pollefes CMPSC 670 2 Motion and perceptual organization Sometimes,
Roadmap. Introduction to image analysis (computer vision) Theory of edge detection. Applications
 Theory of edge detection. Applications") Edge Detection Roadmap Introduction to image analysis (computer vision) Its connection with psychology and neuroscience Why is image analysis difficult? Theory of edge detection Gradient operator Advanced
Edge Detection Roadmap Introduction to image analysis (computer vision) Its connection with psychology and neuroscience Why is image analysis difficult? Theory of edge detection Gradient operator Advanced
Image matching. by Diva Sian. by swashford
 Image matching by Diva Sian by swashford Harder case by Diva Sian by scgbt Invariant local features Find features that are invariant to transformations geometric invariance: translation, rotation, scale
Image matching by Diva Sian by swashford Harder case by Diva Sian by scgbt Invariant local features Find features that are invariant to transformations geometric invariance: translation, rotation, scale
INTEREST POINTS AT DIFFERENT SCALES
 INTEREST POINTS AT DIFFERENT SCALES Thank you for the slides. They come mostly from the following sources. Dan Huttenlocher Cornell U David Lowe U. of British Columbia Martial Hebert CMU Intuitively, junctions
INTEREST POINTS AT DIFFERENT SCALES Thank you for the slides. They come mostly from the following sources. Dan Huttenlocher Cornell U David Lowe U. of British Columbia Martial Hebert CMU Intuitively, junctions
Edge Detection. CS 650: Computer Vision
 CS 650: Computer Vision Edges and Gradients Edge: local indication of an object transition Edge detection: local operators that find edges (usually involves convolution) Local intensity transitions are
CS 650: Computer Vision Edges and Gradients Edge: local indication of an object transition Edge detection: local operators that find edges (usually involves convolution) Local intensity transitions are
Local Features (contd.)
") Motivation Local Features (contd.) Readings: Mikolajczyk and Schmid; F&P Ch 10 Feature points are used also or: Image alignment (homography, undamental matrix) 3D reconstruction Motion tracking Object
Motivation Local Features (contd.) Readings: Mikolajczyk and Schmid; F&P Ch 10 Feature points are used also or: Image alignment (homography, undamental matrix) 3D reconstruction Motion tracking Object
SIFT: SCALE INVARIANT FEATURE TRANSFORM BY DAVID LOWE
 SIFT: SCALE INVARIANT FEATURE TRANSFORM BY DAVID LOWE Overview Motivation of Work Overview of Algorithm Scale Space and Difference of Gaussian Keypoint Localization Orientation Assignment Descriptor Building
SIFT: SCALE INVARIANT FEATURE TRANSFORM BY DAVID LOWE Overview Motivation of Work Overview of Algorithm Scale Space and Difference of Gaussian Keypoint Localization Orientation Assignment Descriptor Building
Camera calibration. Outline. Pinhole camera. Camera projection models. Nonlinear least square methods A camera calibration tool
 Outline Camera calibration Camera projection models Camera calibration i Nonlinear least square methods A camera calibration tool Applications Digital Visual Effects Yung-Yu Chuang with slides b Richard
Outline Camera calibration Camera projection models Camera calibration i Nonlinear least square methods A camera calibration tool Applications Digital Visual Effects Yung-Yu Chuang with slides b Richard
Lecture 3: Linear Filters
 Lecture 3: Linear Filters Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Images as functions Linear systems (filters) Convolution and correlation Discrete Fourier Transform (DFT)
Lecture 3: Linear Filters Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Images as functions Linear systems (filters) Convolution and correlation Discrete Fourier Transform (DFT)
Harris Corner Detector
 Multimedia Computing: Algorithms, Systems, and Applications: Feature Extraction By Dr. Yu Cao Department of Computer Science The University of Massachusetts Lowell Lowell, MA 01854, USA Part of the slides
Multimedia Computing: Algorithms, Systems, and Applications: Feature Extraction By Dr. Yu Cao Department of Computer Science The University of Massachusetts Lowell Lowell, MA 01854, USA Part of the slides
Lecture 3: Linear Filters
 Lecture 3: Linear Filters Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Images as functions Linear systems (filters) Convolution and correlation Discrete Fourier Transform (DFT)
Lecture 3: Linear Filters Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Images as functions Linear systems (filters) Convolution and correlation Discrete Fourier Transform (DFT)
Filtering and Edge Detection
 Filtering and Edge Detection Local Neighborhoods Hard to tell anything from a single pixel Example: you see a reddish pixel. Is this the object s color? Illumination? Noise? The next step in order of complexity
Filtering and Edge Detection Local Neighborhoods Hard to tell anything from a single pixel Example: you see a reddish pixel. Is this the object s color? Illumination? Noise? The next step in order of complexity
Machine vision. Summary # 4. The mask for Laplacian is given
 1 Machine vision Summary # 4 The mask for Laplacian is given L = 0 1 0 1 4 1 (6) 0 1 0 Another Laplacian mask that gives more importance to the center element is L = 1 1 1 1 8 1 (7) 1 1 1 Note that the
1 Machine vision Summary # 4 The mask for Laplacian is given L = 0 1 0 1 4 1 (6) 0 1 0 Another Laplacian mask that gives more importance to the center element is L = 1 1 1 1 8 1 (7) 1 1 1 Note that the
INF Introduction to classifiction Anne Solberg Based on Chapter 2 ( ) in Duda and Hart: Pattern Classification
 in Duda and Hart: Pattern Classification") INF 4300 151014 Introduction to classifiction Anne Solberg anne@ifiuiono Based on Chapter 1-6 in Duda and Hart: Pattern Classification 151014 INF 4300 1 Introduction to classification One of the most challenging
INF 4300 151014 Introduction to classifiction Anne Solberg anne@ifiuiono Based on Chapter 1-6 in Duda and Hart: Pattern Classification 151014 INF 4300 1 Introduction to classification One of the most challenging
Machine vision, spring 2018 Summary 4
 Machine vision Summary # 4 The mask for Laplacian is given L = 4 (6) Another Laplacian mask that gives more importance to the center element is given by L = 8 (7) Note that the sum of the elements in the
Machine vision Summary # 4 The mask for Laplacian is given L = 4 (6) Another Laplacian mask that gives more importance to the center element is given by L = 8 (7) Note that the sum of the elements in the
Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems
 Robots for People --- A project for intelligent integrated systems") 1 Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems V. Estivill-Castro 2 Perception Concepts Vision Chapter 4 (textbook) Sections 4.3 to 4.5 What is the course
1 Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems V. Estivill-Castro 2 Perception Concepts Vision Chapter 4 (textbook) Sections 4.3 to 4.5 What is the course
Overview. Introduction to local features. Harris interest points + SSD, ZNCC, SIFT. Evaluation and comparison of different detectors
 Overview Introduction to local features Harris interest points + SSD, ZNCC, SIFT Scale & affine invariant interest point detectors Evaluation and comparison of different detectors Region descriptors and
Overview Introduction to local features Harris interest points + SSD, ZNCC, SIFT Scale & affine invariant interest point detectors Evaluation and comparison of different detectors Region descriptors and
SIFT: Scale Invariant Feature Transform
 1 SIFT: Scale Invariant Feature Transform With slides from Sebastian Thrun Stanford CS223B Computer Vision, Winter 2006 3 Pattern Recognition Want to find in here SIFT Invariances: Scaling Rotation Illumination
1 SIFT: Scale Invariant Feature Transform With slides from Sebastian Thrun Stanford CS223B Computer Vision, Winter 2006 3 Pattern Recognition Want to find in here SIFT Invariances: Scaling Rotation Illumination
Edge Detection PSY 5018H: Math Models Hum Behavior, Prof. Paul Schrater, Spring 2005
 Edge Detection PSY 5018H: Math Models Hum Behavior, Prof. Paul Schrater, Spring 2005 Gradients and edges Points of sharp change in an image are interesting: change in reflectance change in object change
Edge Detection PSY 5018H: Math Models Hum Behavior, Prof. Paul Schrater, Spring 2005 Gradients and edges Points of sharp change in an image are interesting: change in reflectance change in object change
Interest Point Detection. Lecture-4
 nterest Point Detection Lectre-4 Contents Harris Corner Detector Sm o Sqares Dierences (SSD Corrleation Talor Series Eigen Vectors and Eigen Vales nariance and co-ariance What is an interest point Epressie
nterest Point Detection Lectre-4 Contents Harris Corner Detector Sm o Sqares Dierences (SSD Corrleation Talor Series Eigen Vectors and Eigen Vales nariance and co-ariance What is an interest point Epressie
Lecture Outline. Basics of Spatial Filtering Smoothing Spatial Filters. Sharpening Spatial Filters
 1 Lecture Outline Basics o Spatial Filtering Smoothing Spatial Filters Averaging ilters Order-Statistics ilters Sharpening Spatial Filters Laplacian ilters High-boost ilters Gradient Masks Combining Spatial
1 Lecture Outline Basics o Spatial Filtering Smoothing Spatial Filters Averaging ilters Order-Statistics ilters Sharpening Spatial Filters Laplacian ilters High-boost ilters Gradient Masks Combining Spatial
SIFT keypoint detection. D. Lowe, Distinctive image features from scale-invariant keypoints, IJCV 60 (2), pp , 2004.
, pp , 2004.") SIFT keypoint detection D. Lowe, Distinctive image features from scale-invariant keypoints, IJCV 60 (), pp. 91-110, 004. Keypoint detection with scale selection We want to extract keypoints with characteristic
SIFT keypoint detection D. Lowe, Distinctive image features from scale-invariant keypoints, IJCV 60 (), pp. 91-110, 004. Keypoint detection with scale selection We want to extract keypoints with characteristic
Edge Detection. Introduction to Computer Vision. Useful Mathematics Funcs. The bad news
 Edge Detection Introduction to Computer Vision CS / ECE 8B Thursday, April, 004 Edge detection (HO #5) Edge detection is a local area operator that seeks to find significant, meaningful changes in image
Edge Detection Introduction to Computer Vision CS / ECE 8B Thursday, April, 004 Edge detection (HO #5) Edge detection is a local area operator that seeks to find significant, meaningful changes in image
I Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung University. Computer Vision: 4. Filtering
 I Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung University Computer Vision: 4. Filtering Outline Impulse response and convolution. Linear filter and image pyramid. Textbook: David A. Forsyth
I Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung University Computer Vision: 4. Filtering Outline Impulse response and convolution. Linear filter and image pyramid. Textbook: David A. Forsyth
CS 231A Section 1: Linear Algebra & Probability Review
 CS 231A Section 1: Linear Algebra & Probability Review 1 Topics Support Vector Machines Boosting Viola-Jones face detector Linear Algebra Review Notation Operations & Properties Matrix Calculus Probability
CS 231A Section 1: Linear Algebra & Probability Review 1 Topics Support Vector Machines Boosting Viola-Jones face detector Linear Algebra Review Notation Operations & Properties Matrix Calculus Probability
INF Anne Solberg One of the most challenging topics in image analysis is recognizing a specific object in an image.
 INF 4300 700 Introduction to classifiction Anne Solberg anne@ifiuiono Based on Chapter -6 6inDuda and Hart: attern Classification 303 INF 4300 Introduction to classification One of the most challenging
INF 4300 700 Introduction to classifiction Anne Solberg anne@ifiuiono Based on Chapter -6 6inDuda and Hart: attern Classification 303 INF 4300 Introduction to classification One of the most challenging
CS 179: LECTURE 16 MODEL COMPLEXITY, REGULARIZATION, AND CONVOLUTIONAL NETS
 CS 179: LECTURE 16 MODEL COMPLEXITY, REGULARIZATION, AND CONVOLUTIONAL NETS LAST TIME Intro to cudnn Deep neural nets using cublas and cudnn TODAY Building a better model for image classification Overfitting
CS 179: LECTURE 16 MODEL COMPLEXITY, REGULARIZATION, AND CONVOLUTIONAL NETS LAST TIME Intro to cudnn Deep neural nets using cublas and cudnn TODAY Building a better model for image classification Overfitting
Scale & Affine Invariant Interest Point Detectors
 Scale & Affine Invariant Interest Point Detectors Krystian Mikolajczyk and Cordelia Schmid Presented by Hunter Brown & Gaurav Pandey, February 19, 2009 Roadmap: Motivation Scale Invariant Detector Affine
Scale & Affine Invariant Interest Point Detectors Krystian Mikolajczyk and Cordelia Schmid Presented by Hunter Brown & Gaurav Pandey, February 19, 2009 Roadmap: Motivation Scale Invariant Detector Affine
Taking derivative by convolution
 Taking derivative by convolution Partial derivatives with convolution For 2D function f(x,y), the partial derivative is: For discrete data, we can approximate using finite differences: To implement above
Taking derivative by convolution Partial derivatives with convolution For 2D function f(x,y), the partial derivative is: For discrete data, we can approximate using finite differences: To implement above
Lecture 04 Image Filtering
 Institute of Informatics Institute of Neuroinformatics Lecture 04 Image Filtering Davide Scaramuzza 1 Lab Exercise 2 - Today afternoon Room ETH HG E 1.1 from 13:15 to 15:00 Work description: your first
Institute of Informatics Institute of Neuroinformatics Lecture 04 Image Filtering Davide Scaramuzza 1 Lab Exercise 2 - Today afternoon Room ETH HG E 1.1 from 13:15 to 15:00 Work description: your first
Overview. Harris interest points. Comparing interest points (SSD, ZNCC, SIFT) Scale & affine invariant interest points
 Scale & affine invariant interest points") Overview Harris interest points Comparing interest points (SSD, ZNCC, SIFT) Scale & affine invariant interest points Evaluation and comparison of different detectors Region descriptors and their performance
Overview Harris interest points Comparing interest points (SSD, ZNCC, SIFT) Scale & affine invariant interest points Evaluation and comparison of different detectors Region descriptors and their performance
1.5. Analyzing Graphs of Functions. The Graph of a Function. What you should learn. Why you should learn it. 54 Chapter 1 Functions and Their Graphs
 0_005.qd /7/05 8: AM Page 5 5 Chapter Functions and Their Graphs.5 Analzing Graphs of Functions What ou should learn Use the Vertical Line Test for functions. Find the zeros of functions. Determine intervals
0_005.qd /7/05 8: AM Page 5 5 Chapter Functions and Their Graphs.5 Analzing Graphs of Functions What ou should learn Use the Vertical Line Test for functions. Find the zeros of functions. Determine intervals
Edge Detection. Computer Vision P. Schrater Spring 2003
 Edge Detection Computer Vision P. Schrater Spring 2003 Simplest Model: (Canny) Edge(x) = a U(x) + n(x) U(x)? x=0 Convolve image with U and find points with high magnitude. Choose value by comparing with
Edge Detection Computer Vision P. Schrater Spring 2003 Simplest Model: (Canny) Edge(x) = a U(x) + n(x) U(x)? x=0 Convolve image with U and find points with high magnitude. Choose value by comparing with
INF Introduction to classifiction Anne Solberg
 INF 4300 8.09.17 Introduction to classifiction Anne Solberg anne@ifi.uio.no Introduction to classification Based on handout from Pattern Recognition b Theodoridis, available after the lecture INF 4300
INF 4300 8.09.17 Introduction to classifiction Anne Solberg anne@ifi.uio.no Introduction to classification Based on handout from Pattern Recognition b Theodoridis, available after the lecture INF 4300
CS4495/6495 Introduction to Computer Vision. 2A-L6 Edge detection: 2D operators
 CS4495/6495 Introduction to Computer Vision 2A-L6 Edge detection: 2D operators Derivative theorem of convolution - 1D This saves us one operation: ( ) ( ) x h f h f x f h h x h x ( ) f Derivative of Gaussian
CS4495/6495 Introduction to Computer Vision 2A-L6 Edge detection: 2D operators Derivative theorem of convolution - 1D This saves us one operation: ( ) ( ) x h f h f x f h h x h x ( ) f Derivative of Gaussian
Laplacian Filters. Sobel Filters. Laplacian Filters. Laplacian Filters. Laplacian Filters. Laplacian Filters
 Sobel Filters Note that smoothing the image before applying a Sobel filter typically gives better results. Even thresholding the Sobel filtered image cannot usually create precise, i.e., -pixel wide, edges.
Sobel Filters Note that smoothing the image before applying a Sobel filter typically gives better results. Even thresholding the Sobel filtered image cannot usually create precise, i.e., -pixel wide, edges.
Feature Extraction and Image Processing
 Feature Extraction and Image Processing Second edition Mark S. Nixon Alberto S. Aguado :*авш JBK IIP AMSTERDAM BOSTON HEIDELBERG LONDON NEW YORK OXFORD PARIS SAN DIEGO SAN FRANCISCO SINGAPORE SYDNEY TOKYO
Feature Extraction and Image Processing Second edition Mark S. Nixon Alberto S. Aguado :*авш JBK IIP AMSTERDAM BOSTON HEIDELBERG LONDON NEW YORK OXFORD PARIS SAN DIEGO SAN FRANCISCO SINGAPORE SYDNEY TOKYO
Math Lagrange Multipliers
 Math 213 - Lagrange Multipliers Peter A. Perr Universit of Kentuck October 12, 2018 Homework Re-read section 14.8 Begin practice homework on section 14.8, problems 3-11 (odd), 15, 21, 23 Begin (or continue!)
Math 213 - Lagrange Multipliers Peter A. Perr Universit of Kentuck October 12, 2018 Homework Re-read section 14.8 Begin practice homework on section 14.8, problems 3-11 (odd), 15, 21, 23 Begin (or continue!)
CS 231A Section 1: Linear Algebra & Probability Review. Kevin Tang
 CS 231A Section 1: Linear Algebra & Probability Review Kevin Tang Kevin Tang Section 1-1 9/30/2011 Topics Support Vector Machines Boosting Viola Jones face detector Linear Algebra Review Notation Operations
CS 231A Section 1: Linear Algebra & Probability Review Kevin Tang Kevin Tang Section 1-1 9/30/2011 Topics Support Vector Machines Boosting Viola Jones face detector Linear Algebra Review Notation Operations
Feature detection.
 Feature detection Kim Steenstrup Pedersen kimstp@itu.dk The IT University of Copenhagen Feature detection, The IT University of Copenhagen p.1/20 What is a feature? Features can be thought of as symbolic
Feature detection Kim Steenstrup Pedersen kimstp@itu.dk The IT University of Copenhagen Feature detection, The IT University of Copenhagen p.1/20 What is a feature? Features can be thought of as symbolic
Mathematics 309 Conic sections and their applicationsn. Chapter 2. Quadric figures. ai,j x i x j + b i x i + c =0. 1. Coordinate changes
 Mathematics 309 Conic sections and their applicationsn Chapter 2. Quadric figures In this chapter want to outline quickl how to decide what figure associated in 2D and 3D to quadratic equations look like.
Mathematics 309 Conic sections and their applicationsn Chapter 2. Quadric figures In this chapter want to outline quickl how to decide what figure associated in 2D and 3D to quadratic equations look like.
Reconnaissance d objetsd et vision artificielle
 Reconnaissance d objetsd et vision artificielle http://www.di.ens.fr/willow/teaching/recvis09 Lecture 6 Face recognition Face detection Neural nets Attention! Troisième exercice de programmation du le
Reconnaissance d objetsd et vision artificielle http://www.di.ens.fr/willow/teaching/recvis09 Lecture 6 Face recognition Face detection Neural nets Attention! Troisième exercice de programmation du le
Advanced Features. Advanced Features: Topics. Jana Kosecka. Slides from: S. Thurn, D. Lowe, Forsyth and Ponce. Advanced features and feature matching
 Advanced Features Jana Kosecka Slides from: S. Thurn, D. Lowe, Forsyth and Ponce Advanced Features: Topics Advanced features and feature matching Template matching SIFT features Haar features 2 1 Features
Advanced Features Jana Kosecka Slides from: S. Thurn, D. Lowe, Forsyth and Ponce Advanced Features: Topics Advanced features and feature matching Template matching SIFT features Haar features 2 1 Features
Announcements. Filtering. Image Filtering. Linear Filters. Example: Smoothing by Averaging. Homework 2 is due Apr 26, 11:59 PM Reading:
 Announcements Filtering Homework 2 is due Apr 26, :59 PM eading: Chapter 4: Linear Filters CSE 52 Lecture 6 mage Filtering nput Output Filter (From Bill Freeman) Example: Smoothing by Averaging Linear
Announcements Filtering Homework 2 is due Apr 26, :59 PM eading: Chapter 4: Linear Filters CSE 52 Lecture 6 mage Filtering nput Output Filter (From Bill Freeman) Example: Smoothing by Averaging Linear
Computer Vision Lecture 3
 Computer Vision Lecture 3 Linear Filters 03.11.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Demo Haribo Classification Code available on the class website...
Computer Vision Lecture 3 Linear Filters 03.11.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Demo Haribo Classification Code available on the class website...
Lecture 7: Finding Features (part 2/2)
") Lecture 7: Finding Features (part 2/2) Professor Fei- Fei Li Stanford Vision Lab Lecture 7 -! 1 What we will learn today? Local invariant features MoHvaHon Requirements, invariances Keypoint localizahon
Lecture 7: Finding Features (part 2/2) Professor Fei- Fei Li Stanford Vision Lab Lecture 7 -! 1 What we will learn today? Local invariant features MoHvaHon Requirements, invariances Keypoint localizahon
Scale & Affine Invariant Interest Point Detectors
 Scale & Affine Invariant Interest Point Detectors KRYSTIAN MIKOLAJCZYK AND CORDELIA SCHMID [2004] Shreyas Saxena Gurkirit Singh 23/11/2012 Introduction We are interested in finding interest points. What
Scale & Affine Invariant Interest Point Detectors KRYSTIAN MIKOLAJCZYK AND CORDELIA SCHMID [2004] Shreyas Saxena Gurkirit Singh 23/11/2012 Introduction We are interested in finding interest points. What
Advanced Edge Detection 1
 Advanced Edge Detection 1 Lecture 4 See Sections 2.4 and 1.2.5 in Reinhard Klette: Concise Computer Vision Springer-Verlag, London, 2014 1 See last slide for copyright information. 1 / 27 Agenda 1 LoG
Advanced Edge Detection 1 Lecture 4 See Sections 2.4 and 1.2.5 in Reinhard Klette: Concise Computer Vision Springer-Verlag, London, 2014 1 See last slide for copyright information. 1 / 27 Agenda 1 LoG
Wavelet-based Salient Points with Scale Information for Classification
 Wavelet-based Salient Points with Scale Information for Classification Alexandra Teynor and Hans Burkhardt Department of Computer Science, Albert-Ludwigs-Universität Freiburg, Germany {teynor, Hans.Burkhardt}@informatik.uni-freiburg.de
Wavelet-based Salient Points with Scale Information for Classification Alexandra Teynor and Hans Burkhardt Department of Computer Science, Albert-Ludwigs-Universität Freiburg, Germany {teynor, Hans.Burkhardt}@informatik.uni-freiburg.de
Reachability Analysis Using Octagons
 Reachabilit Analsis Using Octagons Andrew N. Fisher and Chris J. Mers Department of Electrical and Computer Engineering Universit of Utah FAC 0 Jul 9, 0 Digitall Intensive Analog Circuits Digitall intensive
Reachabilit Analsis Using Octagons Andrew N. Fisher and Chris J. Mers Department of Electrical and Computer Engineering Universit of Utah FAC 0 Jul 9, 0 Digitall Intensive Analog Circuits Digitall intensive
CITS 4402 Computer Vision
 CITS 4402 Computer Vision Prof Ajmal Mian Adj/A/Prof Mehdi Ravanbakhsh, CEO at Mapizy (www.mapizy.com) and InFarm (www.infarm.io) Lecture 04 Greyscale Image Analysis Lecture 03 Summary Images as 2-D signals
CITS 4402 Computer Vision Prof Ajmal Mian Adj/A/Prof Mehdi Ravanbakhsh, CEO at Mapizy (www.mapizy.com) and InFarm (www.infarm.io) Lecture 04 Greyscale Image Analysis Lecture 03 Summary Images as 2-D signals
Overview. Introduction to local features. Harris interest points + SSD, ZNCC, SIFT. Evaluation and comparison of different detectors
 Overview Introduction to local features Harris interest points + SSD, ZNCC, SIFT Scale & affine invariant interest point detectors Evaluation and comparison of different detectors Region descriptors and
Overview Introduction to local features Harris interest points + SSD, ZNCC, SIFT Scale & affine invariant interest point detectors Evaluation and comparison of different detectors Region descriptors and
Enhancement Using Local Histogram
 Enhancement Using Local Histogram Used to enhance details over small portions o the image. Deine a square or rectangular neighborhood hose center moves rom piel to piel. Compute local histogram based on
Enhancement Using Local Histogram Used to enhance details over small portions o the image. Deine a square or rectangular neighborhood hose center moves rom piel to piel. Compute local histogram based on
PCA FACE RECOGNITION
 PCA FACE RECOGNITION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Shree Nayar (Columbia) including their own slides. Goal
PCA FACE RECOGNITION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Shree Nayar (Columbia) including their own slides. Goal
Affine Adaptation of Local Image Features Using the Hessian Matrix
 29 Advanced Video and Signal Based Surveillance Affine Adaptation of Local Image Features Using the Hessian Matrix Ruan Lakemond, Clinton Fookes, Sridha Sridharan Image and Video Research Laboratory Queensland
29 Advanced Video and Signal Based Surveillance Affine Adaptation of Local Image Features Using the Hessian Matrix Ruan Lakemond, Clinton Fookes, Sridha Sridharan Image and Video Research Laboratory Queensland