Feature extraction: Corners and blobs
|
|
|
- Mildred Lucas
- 5 years ago
- Views:
Transcription
1 Featre etraction: Corners and blobs





2 Wh etract featres? Motiation: panorama stitching We hae two images how do we combine them?




3 Wh etract featres? Motiation: panorama stitching We hae two images how do we combine them? Step 1: etract featres Step : match featres


4 Wh etract featres? Motiation: panorama stitching We hae two images how do we combine them? Step 1: etract featres Step : match featres Step 3: align images



5 Characteristics of good featres Repeatabilit The same featre can be fond in seeral images despite geometric and photometric transformations Salienc ach featre has a distinctie description Compactness and efficienc Man fewer featres than image piels Localit A featre occpies a relatiel small area of the image; robst to cltter and occlsion
6 Applications Featre points are sed for: Motion tracking mage alignment 3D reconstrction Object recognition ndeing and database retrieal Robot naigation


7 Finding Corners Ke propert: in the region arond a corner image gradient has two or more dominant directions Corners are repeatable and distinctie CH i dmst h "A C bi d C d d D t t C.Harris and M.Stephens. "A Combined Corner and dge Detector. Proceedings of the 4th Ale Vision Conference: pages
8 Corner Detection: Basic dea We shold easil recognize the point b looking throgh a small window Shifting a window in an direction shold gie a large change in intensit Sorce: A. fros flat region: no change in all directions edge : no change along the edge direction corner : significant change in all directions
9 Corner Detection: Mathematics Change in appearance for the shift []: [ ] = w Window fnction Shifted intensit ntensit Window fnction w = or 1 in window 0 otside Gassian Sorce: R. Szeliski

10 Corner Detection: Mathematics Change in appearance for the shift []: [ ] = w 00 3
11 Corner Detection: Mathematics Change in appearance for the shift []: [ ] = w We want to find ot how this fnction behaes for small shifts Second-order Talor epansion of abot 00 local qadratic approimation: [ ] [ ]
12 Corner Detection: Mathematics [ ] w = Second-order Talor epansion of abot 00: ] [ 1 00 ] [ ] [ 00 ] [ 00 [ ] w = w = [ ] w w = [ ] w
13 Corner Detection: Mathematics [ ] w = Second-order Talor epansion of abot 00: ] [ 1 00 ] [ = ] [ 00 ] [ = = w w = = 00 w =
14 Corner Detection: Mathematics [ ] w = Second-order Talor epansion of abot 00: w w ] [ w w ] [ 0 00 = = = w w = = 00 w =
15 Corner Detection: Mathematics The qadratic approimation simplifies to [ ] M where M is a second moment matri compted from image deriaties: es M = w M
16 nterpreting the second moment matri The srface is locall approimated b a qadratic form. Let s tr to nderstand its shape. M ] [ = w M = w M
17 nterpreting the second moment matri First consider the ais-aligned case gradients are either horizontal or ertical 0 λ gradients are either horizontal or ertical = = λ λ w M f either λ is close to 0 then this is not a corner so look for locations where both are large.

![slice of : [ ] M = const This](/docs-images/93/111995357/images/18-2.jpg "is the eqation of an ellipse.")
18 nterpreting the second moment matri Consider a horizontal slice of : [ ] M = const This is the eqation of an ellipse.
19 nterpreting the second moment matri Consider a horizontal slice of : [ ] M = const This is the eqation of an ellipse. Diagonalization of M: M λ = R R 0 λ The ais lengths of the ellipse are determined b the eigenales and the orientation is determined b R direction of the fastest change direction of the slowest change λ ma -1/ λ -1/ min
20 Visalization of second moment matrices




21 Visalization of second moment matrices
22 nterpreting the eigenales Classification of image points sing eigenales of M: λ dge λ >> λ 1 Corner λ 1 and λ are large λ 1 ~ λ ; increases in all directions λ 1 and λ are small; is almost constant in all directions Flat region dge λ 1 >> λ λ 1
23 Corner response fnction R = det M M α trace = λ1λ α λ1 λ α: constant t to dge R < 0 Corner R>0 R small Flat region dge R < 0
24 Harris detector: Steps 1. Compte Gassian deriaties at each piel. Compte second moment matri M in a Gassian window arond each piel 3. Compte corner response fnction R 4. Threshold R 5. Find local maima of response fnction nonmaimm sppression CH i d MSt h "A C bi d C d d D t t C.Harris and M.Stephens. "A Combined Corner and dge Detector. Proceedings of the 4th Ale Vision Conference: pages
25 Harris Detector: Steps
26 Harris Detector: Steps Compte corner response R
27 Harris Detector: Steps Find points with large corner response: R>threshold
28 Harris Detector: Steps Tk Take onl the points it of flocal lmaima of frr
29 Harris Detector: Steps




30 nariance and coariance We want featres to be inariant to photometric transformations and coariant to geometric transformations nariance: image is transformed and featres do not change Coariance: if we hae two transformed ersions of the same image featres shold be detected in corresponding locations
31 Models of mage Change Photometric Affine intensit change a b Geometric Rotation Scale Affine alid for: orthographic camera locall planar object
32 Affine intensit change Onl deriaties are sed => inariance to intensit shift b ntensit scale: a R threshold R image coordinate image coordinate Partiall inariant to affine intensit change
33 mage rotation llipse rotates bt its shape i.e. eigenales remains the same Corner response R is inariant w r t rotation and Corner response R is inariant w.r.t. rotation and corner location is coariant
34 Scaling Corner All points will be classified as edges Not inariant to scaling
35 Achieing scale coariance Goal: independentl detect corresponding regions in scaled ersions of the same image Need scale selection mechanism for finding characteristic region size that is coariant with the image transformation


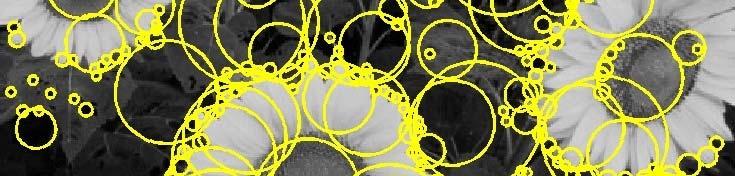

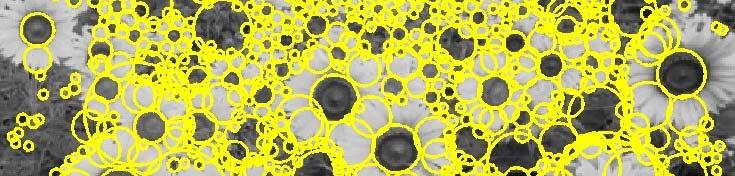
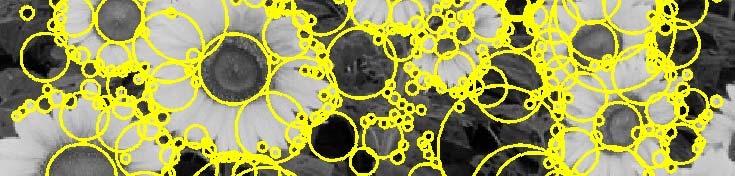
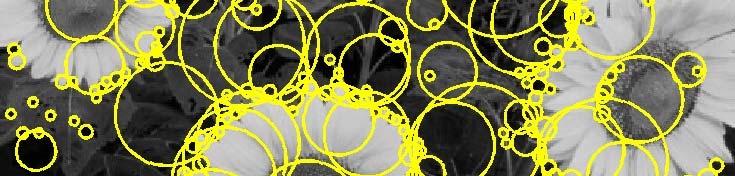
36 Blob detection with scale selection
37 Recall: dge detection f dge d d g Deriatie of Gassian f d d g dge = maimm of deriatie Sorce: S. Seitz
38 dge detection Take f dge d d Second deriatie g of Gassian Laplacian d f d g dge = zero crossing of second deriatie Sorce: S. Seitz
39 From edges to blobs dge = ripple Blob = sperposition of two ripples maimm Spatial selection: the magnitde of the Laplacian response will achiee a maimm at the center of the blob proided the scale of the Laplacian is matched to the scale of the blob
40 Scale selection We want to find the characteristic scale of the blob b conoling it with Laplacians at seeral scales and looking for the maimm response Howeer Laplacian response decas as scale increases: original signal radis=8 increasing σ Wh does this happen?


41 Scale normalization The response of a deriatie of Gassian filter to a perfect step edge decreases as σ increases 1 σ π
42 Scale normalization The response of a deriatie of Gassian filter to a perfect step edge decreases as σ increases To keep response the same scale-inariant mst mltipl Gassian deriatie b σ Laplacian is the second Gassian deriatie so it mst be mltiplied b σ
43 ffect of scale normalization Original signal Unnormalized Laplacian response Scale-normalized Laplacian response maimm
44 Blob detection in D Laplacian of Gassian: Circlarl smmetric operator for blob detection in D g g g =


45 Blob detection in D Laplacian of Gassian: Circlarl smmetric operator for blob detection in D Scale-normalized: g g g = σ norm

46 Scale selection At what scale does the Laplacian achiee a maimm response to a binar circle of radis r? r image Laplacian
47 Scale selection At what scale does the Laplacian achiee a maimm response to a binar circle of radis r? To get maimm response the zeros of the Laplacian hae to be aligned with the circle The Laplacian is gien b p to scale: σ Therefore the maimm response occrs at e / σ σ = r /. r circle image Laplacian

48 Characteristic scale We define the characteristic scale of a blob as the scale that prodces peak of Laplacian response in the blob b center characteristic scale T. Lindeberg "Featre detection with atomatic scale selection." nternational Jornal of Compter Vision 30 : pp


49 Scale-space blob detector 1. Conole image with scale-normalized Laplacian at seeral scales. Find maima of sqared Laplacian response in scale-space
50 Scale-space blob detector: ample









51 Scale-space blob detector: ample



52 Scale-space blob detector: ample
53 fficient implementation Approimating the Laplacian with a difference of Gassians: L= G G σ σ σ Laplacian DG DoG = G k σ G σ Difference of Gassians




54 fficient implementation Daid G. Lowe. "Distinctie image featres from scale-inariant kepoints. JCV 60 pp
55 nariance and coariance properties Laplacian blob response is inariant w.r.t. rotation and scaling Blob location is coariant w.r.t. rotation and scaling What abot intensit change?
56 Achieing affine coariance Consider the second moment matri of the window containing the blob: M = λ 1 1 w = R 0 0 R λ Recall: [ ] M = const direction of the fastest change λ ma -1/ λ -1/ min direction of the slowest change This ellipse isalizes the characteristic shape of the window


57 Affine adaptation eample Scale-inariant regions blobs

58 Affine adaptation eample Affine-adapted blobs

59 Affine adaptation Problem: the second moment window determined b weights w mst match the characteristic ti shape of the region Soltion: iteratie approach Use a circlar window to compte second moment matri Perform affine adaptation to find an ellipse-shaped window Recompte second moment matri sing new window and iterate
60 teratie affine adaptation K. Mikolajczk and C. Schmid Scale and Affine inariant interest point detectors JCV 601:




61 Affine coariance Affinel transformed ersions of the same neighborhood will gie rise to ellipses that are related b the same transformation What to do if we want to compare these image regions? Affine normalization: transform these regions into same-size circles






62 Affine normalization Problem: There is no niqe transformation from an ellipse to a nit circle We can rotate or flip a nit circle and it still stas a nit circle
63 liminating rotation ambigit To assign a niqe orientation to circlar image windows: Create histogram of local l gradient directions in the patch Assign canonical orientation at peak of smoothed histogram 0 π











64 From coariant regions to inariant featres tract affine regions Normalize regions liminate rotational ambigit Compte appearance descriptors SFT Lowe 04


65 nariance s. coariance nariance: featrestransformimage = featresimage Coariance: featrestransformimage = transformfeatresimage Coariant detection => inariant description
Keypoint extraction: Corners Harris Corners Pkwy, Charlotte, NC
 Kepoint etraction: Corners 9300 Harris Corners Pkw Charlotte NC Wh etract kepoints? Motivation: panorama stitching We have two images how do we combine them? Wh etract kepoints? Motivation: panorama stitching
Kepoint etraction: Corners 9300 Harris Corners Pkw Charlotte NC Wh etract kepoints? Motivation: panorama stitching We have two images how do we combine them? Wh etract kepoints? Motivation: panorama stitching
Interest Point Detection. Lecture-4
 nterest Point Detection Lectre-4 Contents Harris Corner Detector Sm o Sqares Dierences (SSD Corrleation Talor Series Eigen Vectors and Eigen Vales nariance and co-ariance What is an interest point Epressie
nterest Point Detection Lectre-4 Contents Harris Corner Detector Sm o Sqares Dierences (SSD Corrleation Talor Series Eigen Vectors and Eigen Vales nariance and co-ariance What is an interest point Epressie
Feature extraction: Corners and blobs
 Feature extraction: Corners and blobs Review: Linear filtering and edge detection Name two different kinds of image noise Name a non-linear smoothing filter What advantages does median filtering have over
Feature extraction: Corners and blobs Review: Linear filtering and edge detection Name two different kinds of image noise Name a non-linear smoothing filter What advantages does median filtering have over
Edges and Scale. Image Features. Detecting edges. Origin of Edges. Solution: smooth first. Effects of noise
 Edges and Scale Image Features From Sandlot Science Slides revised from S. Seitz, R. Szeliski, S. Lazebnik, etc. Origin of Edges surface normal discontinuity depth discontinuity surface color discontinuity
Edges and Scale Image Features From Sandlot Science Slides revised from S. Seitz, R. Szeliski, S. Lazebnik, etc. Origin of Edges surface normal discontinuity depth discontinuity surface color discontinuity
Instance-level recognition: Local invariant features. Cordelia Schmid INRIA, Grenoble
 nstance-level recognition: ocal invariant features Cordelia Schmid NRA Grenoble Overview ntroduction to local features Harris interest points + SSD ZNCC SFT Scale & affine invariant interest point detectors
nstance-level recognition: ocal invariant features Cordelia Schmid NRA Grenoble Overview ntroduction to local features Harris interest points + SSD ZNCC SFT Scale & affine invariant interest point detectors
Recap: edge detection. Source: D. Lowe, L. Fei-Fei
 Recap: edge detection Source: D. Lowe, L. Fei-Fei Canny edge detector 1. Filter image with x, y derivatives of Gaussian 2. Find magnitude and orientation of gradient 3. Non-maximum suppression: Thin multi-pixel
Recap: edge detection Source: D. Lowe, L. Fei-Fei Canny edge detector 1. Filter image with x, y derivatives of Gaussian 2. Find magnitude and orientation of gradient 3. Non-maximum suppression: Thin multi-pixel
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil nfrastructure Eng. & Mgmt. Session 9- mage Detectors, Part Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering Lab e-mail:
CEE598 - Visual Sensing for Civil nfrastructure Eng. & Mgmt. Session 9- mage Detectors, Part Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering Lab e-mail:
Corners, Blobs & Descriptors. With slides from S. Lazebnik & S. Seitz, D. Lowe, A. Efros
 Corners, Blobs & Descriptors With slides from S. Lazebnik & S. Seitz, D. Lowe, A. Efros Motivation: Build a Panorama M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 How do we build panorama?
Corners, Blobs & Descriptors With slides from S. Lazebnik & S. Seitz, D. Lowe, A. Efros Motivation: Build a Panorama M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 How do we build panorama?
Image Analysis. Feature extraction: corners and blobs
 Image Analysis Feature extraction: corners and blobs Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Svetlana Lazebnik, University of North Carolina at Chapel Hill (http://www.cs.unc.edu/~lazebnik/spring10/).
Image Analysis Feature extraction: corners and blobs Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Svetlana Lazebnik, University of North Carolina at Chapel Hill (http://www.cs.unc.edu/~lazebnik/spring10/).
Lecture 05 Point Feature Detection and Matching
 nstitute of nformatics nstitute of Neuroinformatics Lecture 05 Point Feature Detection and Matching Davide Scaramuzza 1 Lab Eercise 3 - Toda afternoon Room ETH HG E 1.1 from 13:15 to 15:00 Wor description:
nstitute of nformatics nstitute of Neuroinformatics Lecture 05 Point Feature Detection and Matching Davide Scaramuzza 1 Lab Eercise 3 - Toda afternoon Room ETH HG E 1.1 from 13:15 to 15:00 Wor description:
Instance-level recognition: Local invariant features. Cordelia Schmid INRIA, Grenoble
 nstance-level recognition: ocal invariant features Cordelia Schmid NRA Grenoble Overview ntroduction to local features Harris interest t points + SSD ZNCC SFT Scale & affine invariant interest point detectors
nstance-level recognition: ocal invariant features Cordelia Schmid NRA Grenoble Overview ntroduction to local features Harris interest t points + SSD ZNCC SFT Scale & affine invariant interest point detectors
Instance-level l recognition. Cordelia Schmid INRIA
 nstance-level l recognition Cordelia Schmid NRA nstance-level recognition Particular objects and scenes large databases Application Search photos on the web for particular places Find these landmars...in
nstance-level l recognition Cordelia Schmid NRA nstance-level recognition Particular objects and scenes large databases Application Search photos on the web for particular places Find these landmars...in
Perception III: Filtering, Edges, and Point-features
 Perception : Filtering, Edges, and Point-features Davide Scaramuzza Universit of Zurich Margarita Chli, Paul Furgale, Marco Hutter, Roland Siegwart 1 Toda s outline mage filtering Smoothing Edge detection
Perception : Filtering, Edges, and Point-features Davide Scaramuzza Universit of Zurich Margarita Chli, Paul Furgale, Marco Hutter, Roland Siegwart 1 Toda s outline mage filtering Smoothing Edge detection
Instance-level recognition: Local invariant features. Cordelia Schmid INRIA, Grenoble
 nstance-level recognition: ocal invariant features Cordelia Schmid NRA Grenoble Overview ntroduction to local features Harris interest points + SSD ZNCC SFT Scale & affine invariant interest point detectors
nstance-level recognition: ocal invariant features Cordelia Schmid NRA Grenoble Overview ntroduction to local features Harris interest points + SSD ZNCC SFT Scale & affine invariant interest point detectors
Blob Detection CSC 767
 Blob Detection CSC 767 Blob detection Slides: S. Lazebnik Feature detection with scale selection We want to extract features with characteristic scale that is covariant with the image transformation Blob
Blob Detection CSC 767 Blob detection Slides: S. Lazebnik Feature detection with scale selection We want to extract features with characteristic scale that is covariant with the image transformation Blob
SIFT keypoint detection. D. Lowe, Distinctive image features from scale-invariant keypoints, IJCV 60 (2), pp , 2004.
, pp , 2004.") SIFT keypoint detection D. Lowe, Distinctive image features from scale-invariant keypoints, IJCV 60 (), pp. 91-110, 004. Keypoint detection with scale selection We want to extract keypoints with characteristic
SIFT keypoint detection D. Lowe, Distinctive image features from scale-invariant keypoints, IJCV 60 (), pp. 91-110, 004. Keypoint detection with scale selection We want to extract keypoints with characteristic
6.869 Advances in Computer Vision. Prof. Bill Freeman March 1, 2005
 6.869 Advances in Computer Vision Prof. Bill Freeman March 1 2005 1 2 Local Features Matching points across images important for: object identification instance recognition object class recognition pose
6.869 Advances in Computer Vision Prof. Bill Freeman March 1 2005 1 2 Local Features Matching points across images important for: object identification instance recognition object class recognition pose
Lecture 8: Interest Point Detection. Saad J Bedros
 #1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Review of Edge Detectors #2 Today s Lecture Interest Points Detection What do we mean with Interest Point Detection in an Image Goal:
#1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Review of Edge Detectors #2 Today s Lecture Interest Points Detection What do we mean with Interest Point Detection in an Image Goal:
Feature detectors and descriptors. Fei-Fei Li
 Feature detectors and descriptors Fei-Fei Li Feature Detection e.g. DoG detected points (~300) coordinates, neighbourhoods Feature Description e.g. SIFT local descriptors (invariant) vectors database of
Feature detectors and descriptors Fei-Fei Li Feature Detection e.g. DoG detected points (~300) coordinates, neighbourhoods Feature Description e.g. SIFT local descriptors (invariant) vectors database of
Feature detectors and descriptors. Fei-Fei Li
 Feature detectors and descriptors Fei-Fei Li Feature Detection e.g. DoG detected points (~300) coordinates, neighbourhoods Feature Description e.g. SIFT local descriptors (invariant) vectors database of
Feature detectors and descriptors Fei-Fei Li Feature Detection e.g. DoG detected points (~300) coordinates, neighbourhoods Feature Description e.g. SIFT local descriptors (invariant) vectors database of
* h + = Lec 05: Interesting Points Detection. Image Analysis & Retrieval. Outline. Image Filtering. Recap of Lec 04 Image Filtering Edge Features
 age Analsis & Retrieval Outline CS/EE 5590 Special Topics (Class ds: 44873, 44874) Fall 06, M/W 4-5:5p@Bloch 00 Lec 05: nteresting Points Detection Recap of Lec 04 age Filtering Edge Features Hoework Harris
age Analsis & Retrieval Outline CS/EE 5590 Special Topics (Class ds: 44873, 44874) Fall 06, M/W 4-5:5p@Bloch 00 Lec 05: nteresting Points Detection Recap of Lec 04 age Filtering Edge Features Hoework Harris
Detectors part II Descriptors
 EECS 442 Computer vision Detectors part II Descriptors Blob detectors Invariance Descriptors Some slides of this lectures are courtesy of prof F. Li, prof S. Lazebnik, and various other lecturers Goal:
EECS 442 Computer vision Detectors part II Descriptors Blob detectors Invariance Descriptors Some slides of this lectures are courtesy of prof F. Li, prof S. Lazebnik, and various other lecturers Goal:
Blobs & Scale Invariance
 Blobs & Scale Invariance Prof. Didier Stricker Doz. Gabriele Bleser Computer Vision: Object and People Tracking With slides from Bebis, S. Lazebnik & S. Seitz, D. Lowe, A. Efros 1 Apertizer: some videos
Blobs & Scale Invariance Prof. Didier Stricker Doz. Gabriele Bleser Computer Vision: Object and People Tracking With slides from Bebis, S. Lazebnik & S. Seitz, D. Lowe, A. Efros 1 Apertizer: some videos
Instance-level l recognition. Cordelia Schmid & Josef Sivic INRIA
 nstance-level l recognition Cordelia Schmid & Josef Sivic NRA nstance-level recognition Particular objects and scenes large databases Application Search photos on the web for particular places Find these
nstance-level l recognition Cordelia Schmid & Josef Sivic NRA nstance-level recognition Particular objects and scenes large databases Application Search photos on the web for particular places Find these
Advances in Computer Vision. Prof. Bill Freeman. Image and shape descriptors. Readings: Mikolajczyk and Schmid; Belongie et al.
 6.869 Advances in Computer Vision Prof. Bill Freeman March 3, 2005 Image and shape descriptors Affine invariant features Comparison of feature descriptors Shape context Readings: Mikolajczyk and Schmid;
6.869 Advances in Computer Vision Prof. Bill Freeman March 3, 2005 Image and shape descriptors Affine invariant features Comparison of feature descriptors Shape context Readings: Mikolajczyk and Schmid;
Lecture 8: Interest Point Detection. Saad J Bedros
 #1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Last Lecture : Edge Detection Preprocessing of image is desired to eliminate or at least minimize noise effects There is always tradeoff
#1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Last Lecture : Edge Detection Preprocessing of image is desired to eliminate or at least minimize noise effects There is always tradeoff
CS4670: Computer Vision Kavita Bala. Lecture 7: Harris Corner Detec=on
 CS4670: Computer Vision Kavita Bala Lecture 7: Harris Corner Detec=on Announcements HW 1 will be out soon Sign up for demo slots for PA 1 Remember that both partners have to be there We will ask you to
CS4670: Computer Vision Kavita Bala Lecture 7: Harris Corner Detec=on Announcements HW 1 will be out soon Sign up for demo slots for PA 1 Remember that both partners have to be there We will ask you to
EE2 Mathematics : Functions of Multiple Variables
 EE2 Mathematics : Fnctions of Mltiple Variables http://www2.imperial.ac.k/ nsjones These notes are not identical word-for-word with m lectres which will be gien on the blackboard. Some of these notes ma
EE2 Mathematics : Fnctions of Mltiple Variables http://www2.imperial.ac.k/ nsjones These notes are not identical word-for-word with m lectres which will be gien on the blackboard. Some of these notes ma
Optical flow. Subhransu Maji. CMPSCI 670: Computer Vision. October 20, 2016
 Optical flow Subhransu Maji CMPSC 670: Computer Vision October 20, 2016 Visual motion Man slides adapted from S. Seitz, R. Szeliski, M. Pollefes CMPSC 670 2 Motion and perceptual organization Sometimes,
Optical flow Subhransu Maji CMPSC 670: Computer Vision October 20, 2016 Visual motion Man slides adapted from S. Seitz, R. Szeliski, M. Pollefes CMPSC 670 2 Motion and perceptual organization Sometimes,
Local Features (contd.)
") Motivation Local Features (contd.) Readings: Mikolajczyk and Schmid; F&P Ch 10 Feature points are used also or: Image alignment (homography, undamental matrix) 3D reconstruction Motion tracking Object
Motivation Local Features (contd.) Readings: Mikolajczyk and Schmid; F&P Ch 10 Feature points are used also or: Image alignment (homography, undamental matrix) 3D reconstruction Motion tracking Object
Lecture 12. Local Feature Detection. Matching with Invariant Features. Why extract features? Why extract features? Why extract features?
 Lecture 1 Why extract eatures? Motivation: panorama stitching We have two images how do we combine them? Local Feature Detection Guest lecturer: Alex Berg Reading: Harris and Stephens David Lowe IJCV We
Lecture 1 Why extract eatures? Motivation: panorama stitching We have two images how do we combine them? Local Feature Detection Guest lecturer: Alex Berg Reading: Harris and Stephens David Lowe IJCV We
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely Lecture 5: Feature descriptors and matching Szeliski: 4.1 Reading Announcements Project 1 Artifacts due tomorrow, Friday 2/17, at 11:59pm Project 2 will be released
CS5670: Computer Vision Noah Snavely Lecture 5: Feature descriptors and matching Szeliski: 4.1 Reading Announcements Project 1 Artifacts due tomorrow, Friday 2/17, at 11:59pm Project 2 will be released
MAT389 Fall 2016, Problem Set 6
 MAT389 Fall 016, Problem Set 6 Trigonometric and hperbolic fnctions 6.1 Show that e iz = cos z + i sin z for eer comple nmber z. Hint: start from the right-hand side and work or wa towards the left-hand
MAT389 Fall 016, Problem Set 6 Trigonometric and hperbolic fnctions 6.1 Show that e iz = cos z + i sin z for eer comple nmber z. Hint: start from the right-hand side and work or wa towards the left-hand
CSE 473/573 Computer Vision and Image Processing (CVIP)
") CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Lecture 11 Local Features 1 Schedule Last class We started local features Today More on local features Readings for
CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Lecture 11 Local Features 1 Schedule Last class We started local features Today More on local features Readings for
Properties of detectors Edge detectors Harris DoG Properties of descriptors SIFT HOG Shape context
 Lecture 10 Detectors and descriptors Properties of detectors Edge detectors Harris DoG Properties of descriptors SIFT HOG Shape context Silvio Savarese Lecture 10-16-Feb-15 From the 3D to 2D & vice versa
Lecture 10 Detectors and descriptors Properties of detectors Edge detectors Harris DoG Properties of descriptors SIFT HOG Shape context Silvio Savarese Lecture 10-16-Feb-15 From the 3D to 2D & vice versa
Geometric Image Manipulation. Lecture #4 Wednesday, January 24, 2018
 Geometric Image Maniplation Lectre 4 Wednesda, Janar 4, 08 Programming Assignment Image Maniplation: Contet To start with the obvios, an image is a D arra of piels Piel locations represent points on the
Geometric Image Maniplation Lectre 4 Wednesda, Janar 4, 08 Programming Assignment Image Maniplation: Contet To start with the obvios, an image is a D arra of piels Piel locations represent points on the
LoG Blob Finding and Scale. Scale Selection. Blobs (and scale selection) Achieving scale covariance. Blob detection in 2D. Blob detection in 2D
 Achieving scale covariance. Blob detection in 2D. Blob detection in 2D") Achieving scale covariance Blobs (and scale selection) Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region
Achieving scale covariance Blobs (and scale selection) Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region
Invariant local features. Invariant Local Features. Classes of transformations. (Good) invariant local features. Case study: panorama stitching
 invariant local features. Case study: panorama stitching") Invariant local eatures Invariant Local Features Tuesday, February 6 Subset o local eature types designed to be invariant to Scale Translation Rotation Aine transormations Illumination 1) Detect distinctive
Invariant local eatures Invariant Local Features Tuesday, February 6 Subset o local eature types designed to be invariant to Scale Translation Rotation Aine transormations Illumination 1) Detect distinctive
INTEREST POINTS AT DIFFERENT SCALES
 INTEREST POINTS AT DIFFERENT SCALES Thank you for the slides. They come mostly from the following sources. Dan Huttenlocher Cornell U David Lowe U. of British Columbia Martial Hebert CMU Intuitively, junctions
INTEREST POINTS AT DIFFERENT SCALES Thank you for the slides. They come mostly from the following sources. Dan Huttenlocher Cornell U David Lowe U. of British Columbia Martial Hebert CMU Intuitively, junctions
Chapter 6 Momentum Transfer in an External Laminar Boundary Layer
 6. Similarit Soltions Chapter 6 Momentm Transfer in an Eternal Laminar Bondar Laer Consider a laminar incompressible bondar laer with constant properties. Assme the flow is stead and two-dimensional aligned
6. Similarit Soltions Chapter 6 Momentm Transfer in an Eternal Laminar Bondar Laer Consider a laminar incompressible bondar laer with constant properties. Assme the flow is stead and two-dimensional aligned
Linear Strain Triangle and other types of 2D elements. By S. Ziaei Rad
 Linear Strain Triangle and other tpes o D elements B S. Ziaei Rad Linear Strain Triangle (LST or T6 This element is also called qadratic trianglar element. Qadratic Trianglar Element Linear Strain Triangle
Linear Strain Triangle and other tpes o D elements B S. Ziaei Rad Linear Strain Triangle (LST or T6 This element is also called qadratic trianglar element. Qadratic Trianglar Element Linear Strain Triangle
Achieving scale covariance
 Achieving scale covariance Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region size that is covariant
Achieving scale covariance Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region size that is covariant
Extract useful building blocks: blobs. the same image like for the corners
 Extract useful building blocks: blobs the same image like for the corners Here were the corners... Blob detection in 2D Laplacian of Gaussian: Circularly symmetric operator for blob detection in 2D 2 g=
Extract useful building blocks: blobs the same image like for the corners Here were the corners... Blob detection in 2D Laplacian of Gaussian: Circularly symmetric operator for blob detection in 2D 2 g=
Overview. Introduction to local features. Harris interest points + SSD, ZNCC, SIFT. Evaluation and comparison of different detectors
 Overview Introduction to local features Harris interest points + SSD, ZNCC, SIFT Scale & affine invariant interest point detectors Evaluation and comparison of different detectors Region descriptors and
Overview Introduction to local features Harris interest points + SSD, ZNCC, SIFT Scale & affine invariant interest point detectors Evaluation and comparison of different detectors Region descriptors and
Interest Operators. All lectures are from posted research papers. Harris Corner Detector: the first and most basic interest operator
 Interest Operators All lectures are from posted research papers. Harris Corner Detector: the first and most basic interest operator SIFT interest point detector and region descriptor Kadir Entrop Detector
Interest Operators All lectures are from posted research papers. Harris Corner Detector: the first and most basic interest operator SIFT interest point detector and region descriptor Kadir Entrop Detector
10.4 Solving Equations in Quadratic Form, Equations Reducible to Quadratics
 . Solving Eqations in Qadratic Form, Eqations Redcible to Qadratics Now that we can solve all qadratic eqations we want to solve eqations that are not eactl qadratic bt can either be made to look qadratic
. Solving Eqations in Qadratic Form, Eqations Redcible to Qadratics Now that we can solve all qadratic eqations we want to solve eqations that are not eactl qadratic bt can either be made to look qadratic
u P(t) = P(x,y) r v t=0 4/4/2006 Motion ( F.Robilliard) 1
 = P(x,y) r v t=0 4/4/2006 Motion ( F.Robilliard) 1") y g j P(t) P(,y) r t0 i 4/4/006 Motion ( F.Robilliard) 1 Motion: We stdy in detail three cases of motion: 1. Motion in one dimension with constant acceleration niform linear motion.. Motion in two dimensions
y g j P(t) P(,y) r t0 i 4/4/006 Motion ( F.Robilliard) 1 Motion: We stdy in detail three cases of motion: 1. Motion in one dimension with constant acceleration niform linear motion.. Motion in two dimensions
Overview. Harris interest points. Comparing interest points (SSD, ZNCC, SIFT) Scale & affine invariant interest points
 Scale & affine invariant interest points") Overview Harris interest points Comparing interest points (SSD, ZNCC, SIFT) Scale & affine invariant interest points Evaluation and comparison of different detectors Region descriptors and their performance
Overview Harris interest points Comparing interest points (SSD, ZNCC, SIFT) Scale & affine invariant interest points Evaluation and comparison of different detectors Region descriptors and their performance
Vectors in Rn un. This definition of norm is an extension of the Pythagorean Theorem. Consider the vector u = (5, 8) in R 2
 in R 2") MATH 307 Vectors in Rn Dr. Neal, WKU Matrices of dimension 1 n can be thoght of as coordinates, or ectors, in n- dimensional space R n. We can perform special calclations on these ectors. In particlar,
MATH 307 Vectors in Rn Dr. Neal, WKU Matrices of dimension 1 n can be thoght of as coordinates, or ectors, in n- dimensional space R n. We can perform special calclations on these ectors. In particlar,
Change of Variables. (f T) JT. f = U
 JT. f = U") Change of Variables 4-5-8 The change of ariables formla for mltiple integrals is like -sbstittion for single-ariable integrals. I ll gie the general change of ariables formla first, and consider specific
Change of Variables 4-5-8 The change of ariables formla for mltiple integrals is like -sbstittion for single-ariable integrals. I ll gie the general change of ariables formla first, and consider specific
PHASE PLANE DIAGRAMS OF DIFFERENCE EQUATIONS. 1. Introduction
 PHASE PLANE DIAGRAMS OF DIFFERENCE EQUATIONS TANYA DEWLAND, JEROME WESTON, AND RACHEL WEYRENS Abstract. We will be determining qalitatie featres of a discrete dynamical system of homogeneos difference
PHASE PLANE DIAGRAMS OF DIFFERENCE EQUATIONS TANYA DEWLAND, JEROME WESTON, AND RACHEL WEYRENS Abstract. We will be determining qalitatie featres of a discrete dynamical system of homogeneos difference
Concept of Stress at a Point
 Washkeic College of Engineering Section : STRONG FORMULATION Concept of Stress at a Point Consider a point ithin an arbitraril loaded deformable bod Define Normal Stress Shear Stress lim A Fn A lim A FS
Washkeic College of Engineering Section : STRONG FORMULATION Concept of Stress at a Point Consider a point ithin an arbitraril loaded deformable bod Define Normal Stress Shear Stress lim A Fn A lim A FS
10.2 Solving Quadratic Equations by Completing the Square
 . Solving Qadratic Eqations b Completing the Sqare Consider the eqation ( ) We can see clearl that the soltions are However, What if the eqation was given to s in standard form, that is 6 How wold we go
. Solving Qadratic Eqations b Completing the Sqare Consider the eqation ( ) We can see clearl that the soltions are However, What if the eqation was given to s in standard form, that is 6 How wold we go
Corner detection: the basic idea
 Corner detection: the basic idea At a corner, shifting a window in any direction should give a large change in intensity flat region: no change in all directions edge : no change along the edge direction
Corner detection: the basic idea At a corner, shifting a window in any direction should give a large change in intensity flat region: no change in all directions edge : no change along the edge direction
1 The space of linear transformations from R n to R m :
 Math 540 Spring 20 Notes #4 Higher deriaties, Taylor s theorem The space of linear transformations from R n to R m We hae discssed linear transformations mapping R n to R m We can add sch linear transformations
Math 540 Spring 20 Notes #4 Higher deriaties, Taylor s theorem The space of linear transformations from R n to R m We hae discssed linear transformations mapping R n to R m We can add sch linear transformations
Lesson 81: The Cross Product of Vectors
 Lesson 8: The Cross Prodct of Vectors IBHL - SANTOWSKI In this lesson yo will learn how to find the cross prodct of two ectors how to find an orthogonal ector to a plane defined by two ectors how to find
Lesson 8: The Cross Prodct of Vectors IBHL - SANTOWSKI In this lesson yo will learn how to find the cross prodct of two ectors how to find an orthogonal ector to a plane defined by two ectors how to find
Motion estimation. Digital Visual Effects Yung-Yu Chuang. with slides by Michael Black and P. Anandan
 Motion estimation Digital Visual Effects Yung-Yu Chuang with slides b Michael Black and P. Anandan Motion estimation Parametric motion image alignment Tracking Optical flow Parametric motion direct method
Motion estimation Digital Visual Effects Yung-Yu Chuang with slides b Michael Black and P. Anandan Motion estimation Parametric motion image alignment Tracking Optical flow Parametric motion direct method
Formal Methods for Deriving Element Equations
 Formal Methods for Deriving Element Eqations And the importance of Shape Fnctions Formal Methods In previos lectres we obtained a bar element s stiffness eqations sing the Direct Method to obtain eact
Formal Methods for Deriving Element Eqations And the importance of Shape Fnctions Formal Methods In previos lectres we obtained a bar element s stiffness eqations sing the Direct Method to obtain eact
Visualisations of Gussian and Mean Curvatures by Using Mathematica and webmathematica
 Visalisations of Gssian and Mean Cratres by Using Mathematica and webmathematica Vladimir Benić, B. sc., (benic@grad.hr), Sonja Gorjanc, Ph. D., (sgorjanc@grad.hr) Faclty of Ciil Engineering, Kačićea 6,
Visalisations of Gssian and Mean Cratres by Using Mathematica and webmathematica Vladimir Benić, B. sc., (benic@grad.hr), Sonja Gorjanc, Ph. D., (sgorjanc@grad.hr) Faclty of Ciil Engineering, Kačićea 6,
Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems
 Robots for People --- A project for intelligent integrated systems") 1 Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems V. Estivill-Castro 2 Perception Concepts Vision Chapter 4 (textbook) Sections 4.3 to 4.5 What is the course
1 Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems V. Estivill-Castro 2 Perception Concepts Vision Chapter 4 (textbook) Sections 4.3 to 4.5 What is the course
Chapter 1: Differential Form of Basic Equations
 MEG 74 Energ and Variational Methods in Mechanics I Brendan J. O Toole, Ph.D. Associate Professor of Mechanical Engineering Howard R. Hghes College of Engineering Universit of Nevada Las Vegas TBE B- (7)
MEG 74 Energ and Variational Methods in Mechanics I Brendan J. O Toole, Ph.D. Associate Professor of Mechanical Engineering Howard R. Hghes College of Engineering Universit of Nevada Las Vegas TBE B- (7)
Scale & Affine Invariant Interest Point Detectors
 Scale & Affine Invariant Interest Point Detectors Krystian Mikolajczyk and Cordelia Schmid Presented by Hunter Brown & Gaurav Pandey, February 19, 2009 Roadmap: Motivation Scale Invariant Detector Affine
Scale & Affine Invariant Interest Point Detectors Krystian Mikolajczyk and Cordelia Schmid Presented by Hunter Brown & Gaurav Pandey, February 19, 2009 Roadmap: Motivation Scale Invariant Detector Affine
SUBJECT:ENGINEERING MATHEMATICS-I SUBJECT CODE :SMT1101 UNIT III FUNCTIONS OF SEVERAL VARIABLES. Jacobians
 SUBJECT:ENGINEERING MATHEMATICS-I SUBJECT CODE :SMT0 UNIT III FUNCTIONS OF SEVERAL VARIABLES Jacobians Changing ariable is something e come across er oten in Integration There are man reasons or changing
SUBJECT:ENGINEERING MATHEMATICS-I SUBJECT CODE :SMT0 UNIT III FUNCTIONS OF SEVERAL VARIABLES Jacobians Changing ariable is something e come across er oten in Integration There are man reasons or changing
Algebraic Multigrid. Multigrid
 Algebraic Mltigrid We re going to discss algebraic ltigrid bt irst begin b discssing ordinar ltigrid. Both o these deal with scale space eaining the iage at ltiple scales. This is iportant or segentation
Algebraic Mltigrid We re going to discss algebraic ltigrid bt irst begin b discssing ordinar ltigrid. Both o these deal with scale space eaining the iage at ltiple scales. This is iportant or segentation
SURF Features. Jacky Baltes Dept. of Computer Science University of Manitoba WWW:
 SURF Features Jacky Baltes Dept. of Computer Science University of Manitoba Email: jacky@cs.umanitoba.ca WWW: http://www.cs.umanitoba.ca/~jacky Salient Spatial Features Trying to find interest points Points
SURF Features Jacky Baltes Dept. of Computer Science University of Manitoba Email: jacky@cs.umanitoba.ca WWW: http://www.cs.umanitoba.ca/~jacky Salient Spatial Features Trying to find interest points Points
CS 3710: Visual Recognition Describing Images with Features. Adriana Kovashka Department of Computer Science January 8, 2015
 CS 3710: Visual Recognition Describing Images with Features Adriana Kovashka Department of Computer Science January 8, 2015 Plan for Today Presentation assignments + schedule changes Image filtering Feature
CS 3710: Visual Recognition Describing Images with Features Adriana Kovashka Department of Computer Science January 8, 2015 Plan for Today Presentation assignments + schedule changes Image filtering Feature
3.3 Operations With Vectors, Linear Combinations
 Operations With Vectors, Linear Combinations Performance Criteria: (d) Mltiply ectors by scalars and add ectors, algebraically Find linear combinations of ectors algebraically (e) Illstrate the parallelogram
Operations With Vectors, Linear Combinations Performance Criteria: (d) Mltiply ectors by scalars and add ectors, algebraically Find linear combinations of ectors algebraically (e) Illstrate the parallelogram
Primary dependent variable is fluid velocity vector V = V ( r ); where r is the position vector
; where r is the position vector") Chapter 4: Flids Kinematics 4. Velocit and Description Methods Primar dependent ariable is flid elocit ector V V ( r ); where r is the position ector If V is known then pressre and forces can be determined
Chapter 4: Flids Kinematics 4. Velocit and Description Methods Primar dependent ariable is flid elocit ector V V ( r ); where r is the position ector If V is known then pressre and forces can be determined
Section 7.4: Integration of Rational Functions by Partial Fractions
 Section 7.4: Integration of Rational Fnctions by Partial Fractions This is abot as complicated as it gets. The Method of Partial Fractions Ecept for a few very special cases, crrently we have no way to
Section 7.4: Integration of Rational Fnctions by Partial Fractions This is abot as complicated as it gets. The Method of Partial Fractions Ecept for a few very special cases, crrently we have no way to
ON TRANSIENT DYNAMICS, OFF-EQUILIBRIUM BEHAVIOUR AND IDENTIFICATION IN BLENDED MULTIPLE MODEL STRUCTURES
 ON TRANSIENT DYNAMICS, OFF-EQUILIBRIUM BEHAVIOUR AND IDENTIFICATION IN BLENDED MULTIPLE MODEL STRUCTURES Roderick Mrray-Smith Dept. of Compting Science, Glasgow Uniersity, Glasgow, Scotland. rod@dcs.gla.ac.k
ON TRANSIENT DYNAMICS, OFF-EQUILIBRIUM BEHAVIOUR AND IDENTIFICATION IN BLENDED MULTIPLE MODEL STRUCTURES Roderick Mrray-Smith Dept. of Compting Science, Glasgow Uniersity, Glasgow, Scotland. rod@dcs.gla.ac.k
Lecture 6: Finding Features (part 1/2)
") Lecture 6: Finding Features (part 1/2) Professor Fei- Fei Li Stanford Vision Lab Lecture 6 -! 1 What we will learn today? Local invariant features MoHvaHon Requirements, invariances Keypoint localizahon
Lecture 6: Finding Features (part 1/2) Professor Fei- Fei Li Stanford Vision Lab Lecture 6 -! 1 What we will learn today? Local invariant features MoHvaHon Requirements, invariances Keypoint localizahon
Elements of Coordinate System Transformations
 B Elements of Coordinate System Transformations Coordinate system transformation is a powerfl tool for solving many geometrical and kinematic problems that pertain to the design of gear ctting tools and
B Elements of Coordinate System Transformations Coordinate system transformation is a powerfl tool for solving many geometrical and kinematic problems that pertain to the design of gear ctting tools and
We automate the bivariate change-of-variables technique for bivariate continuous random variables with
 INFORMS Jornal on Compting Vol. 4, No., Winter 0, pp. 9 ISSN 09-9856 (print) ISSN 56-558 (online) http://dx.doi.org/0.87/ijoc.046 0 INFORMS Atomating Biariate Transformations Jeff X. Yang, John H. Drew,
INFORMS Jornal on Compting Vol. 4, No., Winter 0, pp. 9 ISSN 09-9856 (print) ISSN 56-558 (online) http://dx.doi.org/0.87/ijoc.046 0 INFORMS Atomating Biariate Transformations Jeff X. Yang, John H. Drew,
called the potential flow, and function φ is called the velocity potential.
 J. Szantr Lectre No. 3 Potential flows 1 If the flid flow is irrotational, i.e. everwhere or almost everwhere in the field of flow there is rot 0 it means that there eists a scalar fnction ϕ,, z), sch
J. Szantr Lectre No. 3 Potential flows 1 If the flid flow is irrotational, i.e. everwhere or almost everwhere in the field of flow there is rot 0 it means that there eists a scalar fnction ϕ,, z), sch
1 Differential Equations for Solid Mechanics
 1 Differential Eqations for Solid Mechanics Simple problems involving homogeneos stress states have been considered so far, wherein the stress is the same throghot the component nder std. An eception to
1 Differential Eqations for Solid Mechanics Simple problems involving homogeneos stress states have been considered so far, wherein the stress is the same throghot the component nder std. An eception to
Reduction of over-determined systems of differential equations
 Redction of oer-determined systems of differential eqations Maim Zaytse 1) 1, ) and Vyachesla Akkerman 1) Nclear Safety Institte, Rssian Academy of Sciences, Moscow, 115191 Rssia ) Department of Mechanical
Redction of oer-determined systems of differential eqations Maim Zaytse 1) 1, ) and Vyachesla Akkerman 1) Nclear Safety Institte, Rssian Academy of Sciences, Moscow, 115191 Rssia ) Department of Mechanical
Digital Image Processing. Lecture 8 (Enhancement in the Frequency domain) Bu-Ali Sina University Computer Engineering Dep.
 Bu-Ali Sina University Computer Engineering Dep.") Digital Image Processing Lectre 8 Enhancement in the Freqenc domain B-Ali Sina Uniersit Compter Engineering Dep. Fall 009 Image Enhancement In The Freqenc Domain Otline Jean Baptiste Joseph Forier The
Digital Image Processing Lectre 8 Enhancement in the Freqenc domain B-Ali Sina Uniersit Compter Engineering Dep. Fall 009 Image Enhancement In The Freqenc Domain Otline Jean Baptiste Joseph Forier The
Change of Variables. f(x, y) da = (1) If the transformation T hasn t already been given, come up with the transformation to use.
 da = (1) If the transformation T hasn t already been given, come up with the transformation to use.") MATH 2Q Spring 26 Daid Nichols Change of Variables Change of ariables in mltiple integrals is complicated, bt it can be broken down into steps as follows. The starting point is a doble integral in & y.
MATH 2Q Spring 26 Daid Nichols Change of Variables Change of ariables in mltiple integrals is complicated, bt it can be broken down into steps as follows. The starting point is a doble integral in & y.
Image Processing 1 (IP1) Bildverarbeitung 1
 Bildverarbeitung 1") MIN-Fakultät Fachbereich Informatik Arbeitsbereich SAV/BV KOGS Image Processing 1 IP1 Bildverarbeitung 1 Lecture : Object Recognition Winter Semester 015/16 Slides: Prof. Bernd Neumann Slightly revised
MIN-Fakultät Fachbereich Informatik Arbeitsbereich SAV/BV KOGS Image Processing 1 IP1 Bildverarbeitung 1 Lecture : Object Recognition Winter Semester 015/16 Slides: Prof. Bernd Neumann Slightly revised
Math 263 Assignment #3 Solutions. 1. A function z = f(x, y) is called harmonic if it satisfies Laplace s equation:
 is called harmonic if it satisfies Laplace s equation:") Math 263 Assignment #3 Soltions 1. A fnction z f(x, ) is called harmonic if it satisfies Laplace s eqation: 2 + 2 z 2 0 Determine whether or not the following are harmonic. (a) z x 2 + 2. We se the one-variable
Math 263 Assignment #3 Soltions 1. A fnction z f(x, ) is called harmonic if it satisfies Laplace s eqation: 2 + 2 z 2 0 Determine whether or not the following are harmonic. (a) z x 2 + 2. We se the one-variable
CS 450: COMPUTER GRAPHICS VECTORS SPRING 2016 DR. MICHAEL J. REALE
 CS 45: COMPUTER GRPHICS VECTORS SPRING 216 DR. MICHEL J. RELE INTRODUCTION In graphics, we are going to represent objects and shapes in some form or other. First, thogh, we need to figre ot how to represent
CS 45: COMPUTER GRPHICS VECTORS SPRING 216 DR. MICHEL J. RELE INTRODUCTION In graphics, we are going to represent objects and shapes in some form or other. First, thogh, we need to figre ot how to represent
Lecture 7: Finding Features (part 2/2)
") Lecture 7: Finding Features (part 2/2) Professor Fei- Fei Li Stanford Vision Lab Lecture 7 -! 1 What we will learn today? Local invariant features MoHvaHon Requirements, invariances Keypoint localizahon
Lecture 7: Finding Features (part 2/2) Professor Fei- Fei Li Stanford Vision Lab Lecture 7 -! 1 What we will learn today? Local invariant features MoHvaHon Requirements, invariances Keypoint localizahon
Graphs and Networks Lecture 5. PageRank. Lecturer: Daniel A. Spielman September 20, 2007
 Graphs and Networks Lectre 5 PageRank Lectrer: Daniel A. Spielman September 20, 2007 5.1 Intro to PageRank PageRank, the algorithm reportedly sed by Google, assigns a nmerical rank to eery web page. More
Graphs and Networks Lectre 5 PageRank Lectrer: Daniel A. Spielman September 20, 2007 5.1 Intro to PageRank PageRank, the algorithm reportedly sed by Google, assigns a nmerical rank to eery web page. More
EXERCISES WAVE EQUATION. In Problems 1 and 2 solve the heat equation (1) subject to the given conditions. Assume a rod of length L.
 subject to the given conditions. Assume a rod of length L.") .4 WAVE EQUATION 445 EXERCISES.3 In Problems and solve the heat eqation () sbject to the given conditions. Assme a rod of length.. (, t), (, t) (, ),, > >. (, t), (, t) (, ) ( ) 3. Find the temperatre
.4 WAVE EQUATION 445 EXERCISES.3 In Problems and solve the heat eqation () sbject to the given conditions. Assme a rod of length.. (, t), (, t) (, ),, > >. (, t), (, t) (, ) ( ) 3. Find the temperatre
Chapter 2 Difficulties associated with corners
 Chapter Difficlties associated with corners This chapter is aimed at resolving the problems revealed in Chapter, which are cased b corners and/or discontinos bondar conditions. The first section introdces
Chapter Difficlties associated with corners This chapter is aimed at resolving the problems revealed in Chapter, which are cased b corners and/or discontinos bondar conditions. The first section introdces
m = Average Rate of Change (Secant Slope) Example:
 Example:") Average Rate o Change Secant Slope Deinition: The average change secant slope o a nction over a particlar interval [a, b] or [a, ]. Eample: What is the average rate o change o the nction over the interval
Average Rate o Change Secant Slope Deinition: The average change secant slope o a nction over a particlar interval [a, b] or [a, ]. Eample: What is the average rate o change o the nction over the interval
Image matching. by Diva Sian. by swashford
 Image matching by Diva Sian by swashford Harder case by Diva Sian by scgbt Invariant local features Find features that are invariant to transformations geometric invariance: translation, rotation, scale
Image matching by Diva Sian by swashford Harder case by Diva Sian by scgbt Invariant local features Find features that are invariant to transformations geometric invariance: translation, rotation, scale
Quiz #20. y 2 + 6y = 12x y 2 + 6y + 9 = 12x (y + 3) 2 = 12x + 24 (y + 3) 2 = 12(x 2)
 2 = 12x + 24 (y + 3) 2 = 12(x 2)") Math 25 Trigonometr Ma 2, 2017 Qiz #20 Name: Answer Ke Daid Arnold Instrctions. (10 points) This qiz is open notes, open book. This incldes an spplementar tets or online docments. Yo mst answer all of
Math 25 Trigonometr Ma 2, 2017 Qiz #20 Name: Answer Ke Daid Arnold Instrctions. (10 points) This qiz is open notes, open book. This incldes an spplementar tets or online docments. Yo mst answer all of
Edge Detection. Image Processing - Computer Vision
 Image Processing - Lesson 10 Edge Detection Image Processing - Computer Vision Low Level Edge detection masks Gradient Detectors Compass Detectors Second Derivative - Laplace detectors Edge Linking Image
Image Processing - Lesson 10 Edge Detection Image Processing - Computer Vision Low Level Edge detection masks Gradient Detectors Compass Detectors Second Derivative - Laplace detectors Edge Linking Image
Spring, 2008 CIS 610. Advanced Geometric Methods in Computer Science Jean Gallier Homework 1, Corrected Version
 Spring, 008 CIS 610 Adanced Geometric Methods in Compter Science Jean Gallier Homework 1, Corrected Version Febrary 18, 008; De March 5, 008 A problems are for practice only, and shold not be trned in.
Spring, 008 CIS 610 Adanced Geometric Methods in Compter Science Jean Gallier Homework 1, Corrected Version Febrary 18, 008; De March 5, 008 A problems are for practice only, and shold not be trned in.
Diagonalization of Quadratic Forms. Recall in days past when you were given an equation which looked like
 Diagoalizatio of Qadratic Forms Recall i das past whe o were gie a eqatio which looked like ad o were asked to sketch the set of poits which satisf this eqatio. It was ecessar to complete the sqare so
Diagoalizatio of Qadratic Forms Recall i das past whe o were gie a eqatio which looked like ad o were asked to sketch the set of poits which satisf this eqatio. It was ecessar to complete the sqare so
Differential Geometry. Peter Petersen
 Differential Geometry Peter Petersen CHAPTER Preliminaries.. Vectors-Matrices Gien a basis e, f for a two dimensional ector space we expand ectors sing matrix mltiplication e e + f f e f apple e f and
Differential Geometry Peter Petersen CHAPTER Preliminaries.. Vectors-Matrices Gien a basis e, f for a two dimensional ector space we expand ectors sing matrix mltiplication e e + f f e f apple e f and
Principal Component Analysis (PCA) The Gaussian in D dimensions
 The Gaussian in D dimensions") Prinipal Component Analysis (PCA) im ars, Cognitie Siene epartment he Gassian in dimensions What does a set of eqiprobable points loo lie for a Gassian? In, it s an ellipse. In dimensions, it s an ellipsoid.
Prinipal Component Analysis (PCA) im ars, Cognitie Siene epartment he Gassian in dimensions What does a set of eqiprobable points loo lie for a Gassian? In, it s an ellipse. In dimensions, it s an ellipsoid.
Camera calibration. Outline. Pinhole camera. Camera projection models. Nonlinear least square methods A camera calibration tool
 Outline Camera calibration Camera projection models Camera calibration i Nonlinear least square methods A camera calibration tool Applications Digital Visual Effects Yung-Yu Chuang with slides b Richard
Outline Camera calibration Camera projection models Camera calibration i Nonlinear least square methods A camera calibration tool Applications Digital Visual Effects Yung-Yu Chuang with slides b Richard
Computerized tomography. CT Reconstruction. Physics of beam attenuation. Physics of beam attenuation
 Compterize tomograph Compterize tomograph (CT) is a metho for sing x-ra images to reconstrct a spatiall aring ensit fnction. CT Reconstrction First generation CT scanner 1 2 Phsics of beam attenation CT
Compterize tomograph Compterize tomograph (CT) is a metho for sing x-ra images to reconstrct a spatiall aring ensit fnction. CT Reconstrction First generation CT scanner 1 2 Phsics of beam attenation CT
SIMULATION OF TURBULENT FLOW AND HEAT TRANSFER OVER A BACKWARD-FACING STEP WITH RIBS TURBULATORS
 THERMAL SCIENCE, Year 011, Vol. 15, No. 1, pp. 45-55 45 SIMULATION OF TURBULENT FLOW AND HEAT TRANSFER OVER A BACKWARD-FACING STEP WITH RIBS TURBULATORS b Khdheer S. MUSHATET Mechanical Engineering Department,
THERMAL SCIENCE, Year 011, Vol. 15, No. 1, pp. 45-55 45 SIMULATION OF TURBULENT FLOW AND HEAT TRANSFER OVER A BACKWARD-FACING STEP WITH RIBS TURBULATORS b Khdheer S. MUSHATET Mechanical Engineering Department,
FRTN10 Exercise 12. Synthesis by Convex Optimization
 FRTN Exercise 2. 2. We want to design a controller C for the stable SISO process P as shown in Figre 2. sing the Yola parametrization and convex optimization. To do this, the control loop mst first be
FRTN Exercise 2. 2. We want to design a controller C for the stable SISO process P as shown in Figre 2. sing the Yola parametrization and convex optimization. To do this, the control loop mst first be
FEA Solution Procedure
 EA Soltion Procedre (demonstrated with a -D bar element problem) EA Procedre for Static Analysis. Prepare the E model a. discretize (mesh) the strctre b. prescribe loads c. prescribe spports. Perform calclations
EA Soltion Procedre (demonstrated with a -D bar element problem) EA Procedre for Static Analysis. Prepare the E model a. discretize (mesh) the strctre b. prescribe loads c. prescribe spports. Perform calclations
Optical Flow, KLT Feature Tracker.
 Optical Flow, KL Feature racker E-mail: hogijung@hanang.ac.kr Motion in Computer Vision Motion Structure rom motion Detection/segmentation with direction [1] E-mail: hogijung@hanang.ac.kr Motion Field.s..
Optical Flow, KL Feature racker E-mail: hogijung@hanang.ac.kr Motion in Computer Vision Motion Structure rom motion Detection/segmentation with direction [1] E-mail: hogijung@hanang.ac.kr Motion Field.s..