6.869 Advances in Computer Vision. Prof. Bill Freeman March 1, 2005
|
|
|
- Britney Powers
- 5 years ago
- Views:
Transcription
1 6.869 Advances in Computer Vision Prof. Bill Freeman March
2 2
3 Local Features Matching points across images important for: object identification instance recognition object class recognition pose estimation stereo 3-d shape motion estimate stitching together photographs into a mosaic etc 3
4 Toda nteresting points correspondence. Scale and rotation invariant descriptors [Lowe] 4
5 Correspondence using window matching Points are highl individuall ambiguous More unique matches are possible with small regions of image. 5
6 Correspondence using window matching Left Right scanline Criterion function: error disparit 6
7 7 Sum of Squared Piel Differences Left Right L w R w m m w L L w R R L L L L d = + + = ] [ disparit : function of the intensit difference as a The SSD cost measures } { We define the window function : piels. of windows b are corresponding and W v u R L r m m m m m R L m v d u v u d C v u v u W m m w w
8 8 mage Normalization Even when the cameras are identical models there can be differences in gain and sensitivit. The cameras do not see eactl the same surfaces so their overall light levels can differ. For these reasons and more it is a good idea to normalize the piels in each window: Normalized piel ˆ Window magnitude ] [ Average piel 2 1 W W v u W W v u W m m m m m v u v u = = =

9 mages as Vectors Left Right Unwrap image to form vector using raster scan order w L wr m row 1 m w L m row 2 m Each window is a vector in an m 2 dimensional vector space. Normalization makes them unit length. w L row 3 m 9
10 mage windows as vectors 10
11 Possible metrics Distance? w R d w L Angle? 11
12 12 mage Metrics Normalized Sum of Squared Differences 2 2 SSD ] ˆ ˆ [ d w w v d u v u d C R L W v u R L m = = w L w R d Normalized Correlation cosθ ˆ ˆ NC = = = d w w v d u v u d C R L W v u R L m arg ma arg min 2 * d w w d w w d R L d R L d = =
13 Local Features Not all points are equall good for matching 13
14 14
15 15
16 Aperture Problem and Normal Flow 16
17 Aperture Problem and Normal Flow 17
18 Aperture Problem and Normal Flow 18
19 Aperture Problem and Normal Flow 19
20 Aperture Problem and Normal Flow 20
21 Aperture Problem and Normal Flow 21
22 Review Differential approach: Optical flow constraint equation Brightness should sta constant as ou track motion 1 st order Talor series valid for small δt + uδt + vδt t + δt = t t + uδt + vδt + δt = t t Constraint equation u + v + t = 0 BCCE - Brightness Change Constraint Equation 22
23 23 Aperture Problem and Normal Flow 0 0 = = + + U v u t r The gradient constraint: Defines a line in the uv space u v u t = Normal Flow:
24 Combining Local Constraints v 1 1 U = t 2 3 U = U = 2 t 3 t u etc. 24
25 25 Lucas-Kanade: ntegrate gradients over a Patch Ω + + = t v u v u E 2 Assume a single velocit for all piels within an image patch Solve with: = t t v u 2 2 On the LHS: sum of the 22 outer product tensor of the gradient vector t T U = r
26 Local Patch Analsis 26
27 Selecting Good Features What s a good feature? Satisfies brightness constanc Has sufficient teture variation Does not have too much teture variation Corresponds to a real surface patch Does not deform too much over time 27
28 28 Good Features to Track = t t v u 2 2 A u = b When is This Solvable? A should be invertible A should not be too small due to noise eigenvalues λ 1 and λ 2 of A should not be too small A should be well-conditioned λ 1 / λ 2 should not be too large λ 1 = larger eigenvalue Both conditions satisfied when minλ 1 λ 2 > c
29 29 Harris detector W k k W k k k k W k k k k W k k k k k k k k k k 2 2 Auto-correlation matri Auto-correlation matri captures the structure of the local neighborhood measure based on eigenvalues of this matri 2 strong eigenvalues => interest point 1 strong eigenvalue => contour 0 eigenvalue => uniform region nterest point detection threshold on the eigenvalues local maimum for localization


30 Selecting Good Features λ 1 and λ 2 are large 30


31 Selecting Good Features large λ 1 small λ 2 31


32 Selecting Good Features small λ 1 small λ 2 32
33 Toda nteresting points correspondence. Scale and rotation invariant descriptors [Lowe] 33
34 CVPR 2003 Tutorial Recognition and Matching Based on Local nvariant Features David Lowe Computer Science Department Universit of British Columbia

35 nvariant Local Features mage content is transformed into local feature coordinates that are invariant to translation rotation scale and other imaging parameters SFT Features 35
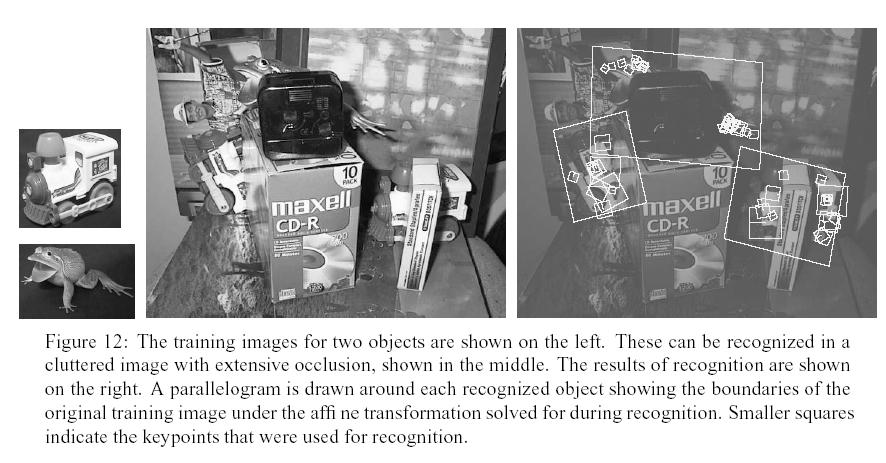
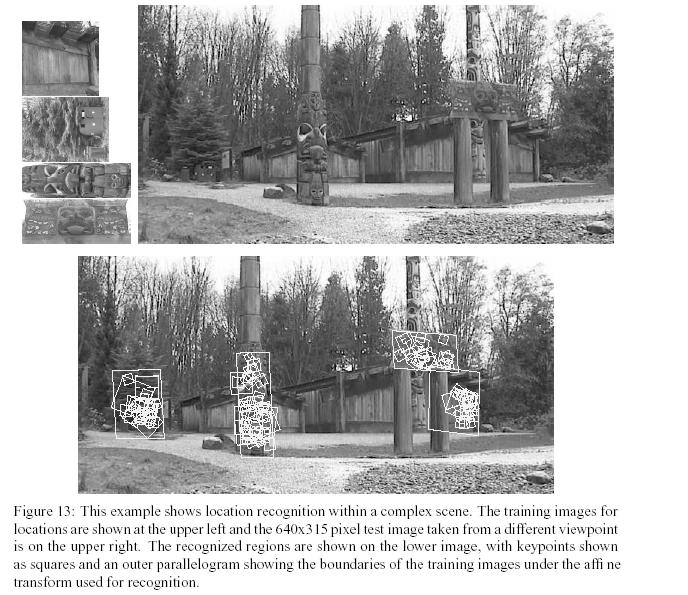
36 Advantages of invariant local features Localit: features are local so robust to occlusion and clutter no prior segmentation Distinctiveness: individual features can be matched to a large database of objects Quantit: man features can be generated for even small objects Efficienc: close to real-time performance Etensibilit: can easil be etended to wide range of differing feature tpes with each adding robustness
37 Res ample Blur Subtra ct Scale invariance Requires a method to repeatabl select points in location and scale: The onl reasonable scale-space kernel is a Gaussian Koenderink 1984; Lindeberg 1994 An efficient choice is to detect peaks in the difference of Gaussian pramid Burt & Adelson 1983; Crowle & Parker 1984 but eamining more scales Difference-of-Gaussian with constant ratio of scales is a close approimation to Lindeberg s scale-normalized Laplacian can be shown from the heat diffusion equation 37

38 Scale space processed one octave at a time 38

39 Res ample Blur Subtra ct Ke point localization Detect maima and minima of difference-of-gaussian in scale space Fit a quadratic to surrounding values for sub-piel and sub-scale interpolation Brown & Lowe 2002 Talor epansion around point: Offset of etremum use finite differences for derivatives: 39
40 Select canonical orientation Create histogram of local gradient directions computed at selected scale Assign canonical orientation at peak of smoothed histogram Each ke specifies stable 2D coordinates scale orientation 0 2π 40

41 Eample of kepoint detection Threshold on value at DOG peak and on ratio of principle curvatures Harris approach a image b 832 DOG etrema c 729 left after peak value threshold d 536 left after testing ratio of principle curvatures 41

42 SFT vector formation Thresholded image gradients are sampled over 1616 arra of locations in scale space Create arra of orientation histograms 8 orientations 44 histogram arra = 128 dimensions 42
43 Feature stabilit to noise Match features after random change in image scale & orientation with differing levels of image noise Find nearest neighbor in database of features 43
44 Feature stabilit to affine change Match features after random change in image scale & orientation with 2% image noise and affine distortion Find nearest neighbor in database of features 44
45 Distinctiveness of features Var size of database of features with 30 degree affine change 2% image noise Measure % correct for single nearest neighbor match 45
46 46
47 47
48 A good SFT features tutorial B Estrada Jepson and Fleet. 48
49 An application of SFT features in m own research 49
50 The couch potato project: Learning from looking at images. Bill Freeman MT Joint work with: Josef Sivic Andrew Zisserman Oford; Bran Russell MT Alosha Efros CMU. December

51 What can ou learn about object categories b simpl looking at images? 51


52 Labelled training databases Labelling object classes in images is tedious and can introduce biases. 52

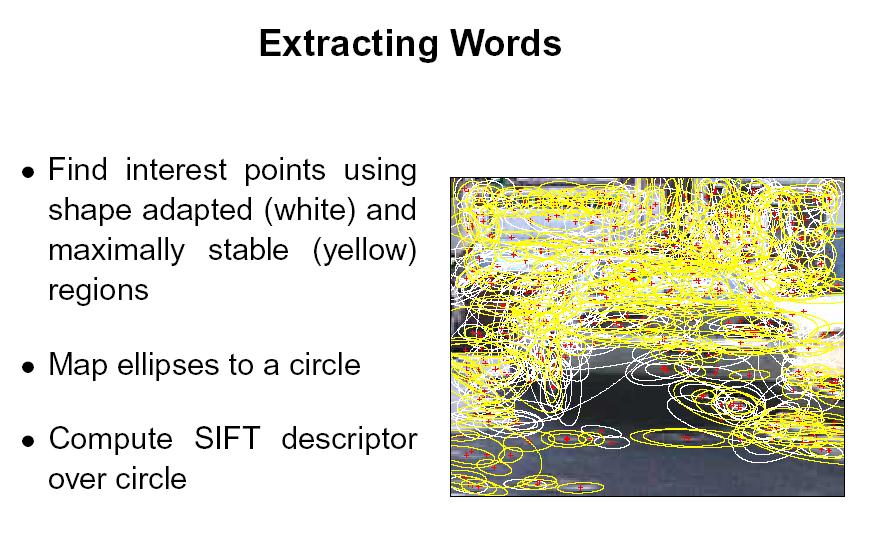
53 Find words Form histograms Discover topics 53
54 54

55 SFT scale invariant feature transforms David Lowe JCV
56 Visual words Vector quantize SFT descriptors to a vocabular of 2237 visual words. Heuristic design of descriptors makes these words somewhat invariant to: Lighting 2-d Orientation 3-d Viewpoint 56

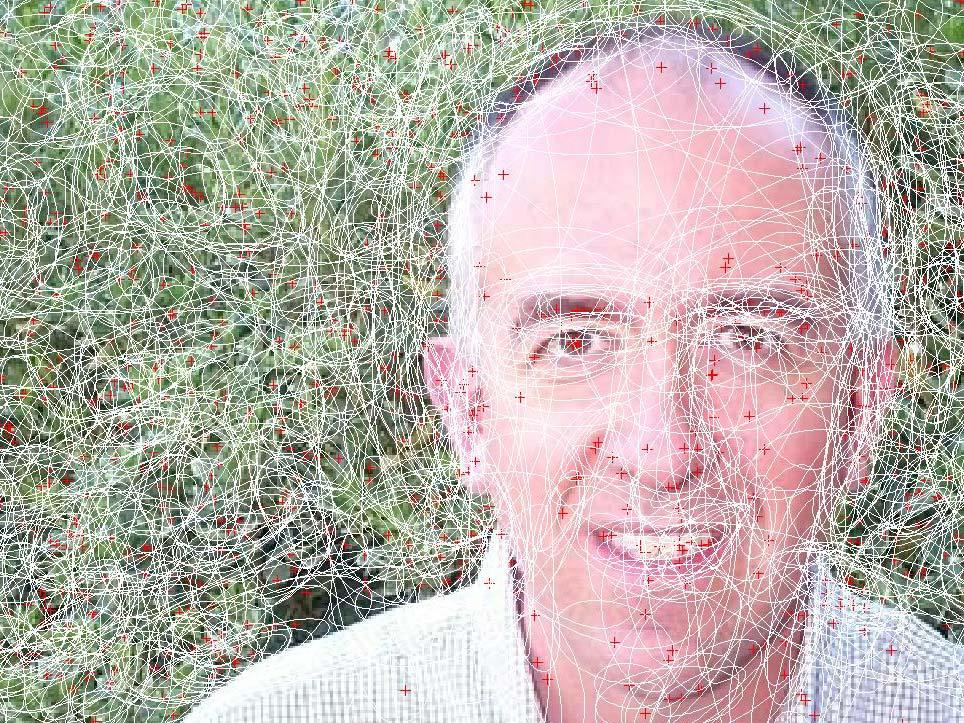
57 Eamples of visual words 57

58 More visual words 58

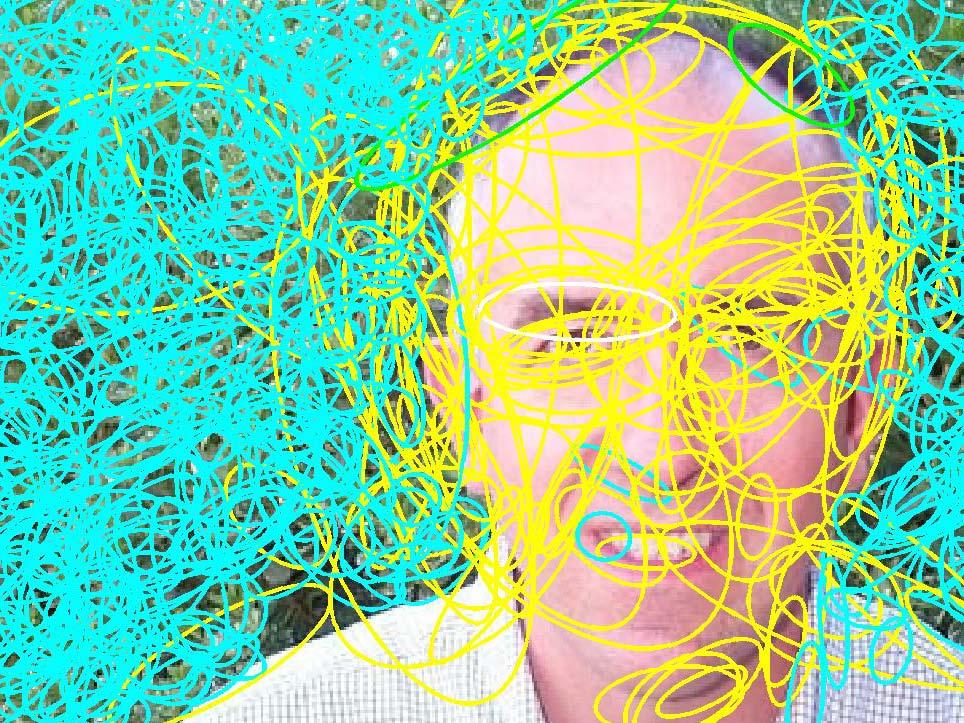
59 Polsem the same word with different meanings 59






60 Eperiment E 60


61 Observation matri eperiment E Visual word # Frame # 13.8 % non-zero entries 61
62 Binarized observation matri Visual word # eperiment E Frame # 13.8 % non-zero entries 62
63 63
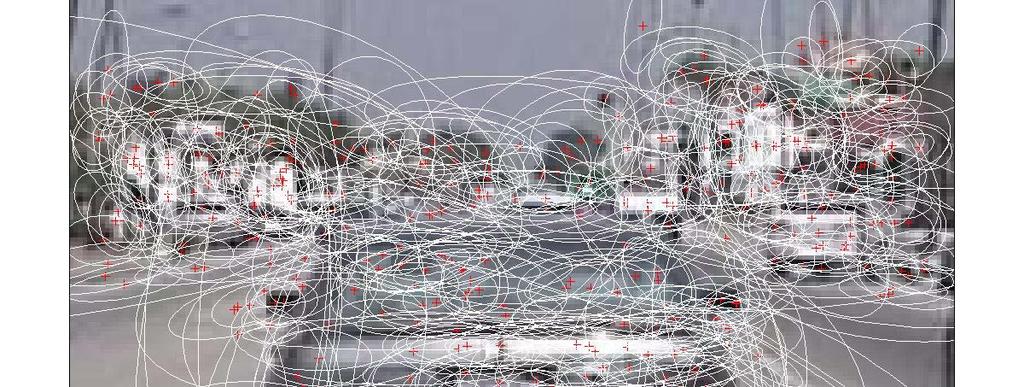
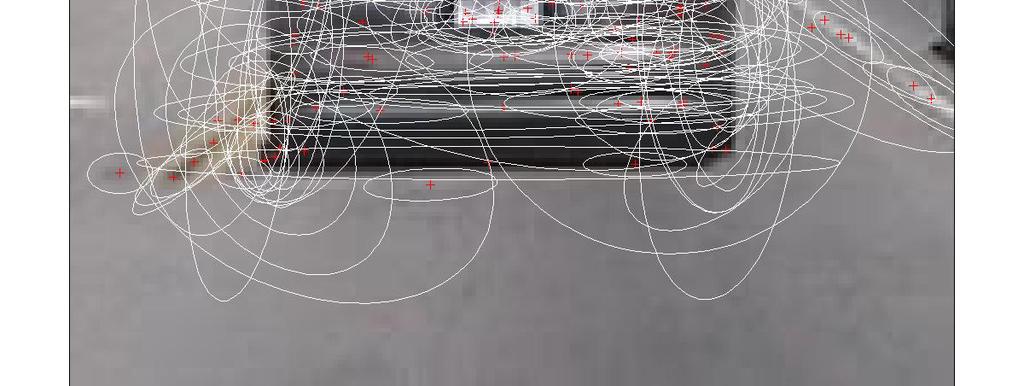
64 Eample segmentations Faces Motorbikes Airplanes Cars Background Background Background Original images Segmentations All detected visual words

65 65
66 66
67 67


68 68
69 69


70 Faces Motorbikes Airplanes Cars Background Background Background 70
71 71
72 72

73 Faces Motorbikes Airplanes Cars Background Background Background 73
74 74
Instance-level recognition: Local invariant features. Cordelia Schmid INRIA, Grenoble
 nstance-level recognition: ocal invariant features Cordelia Schmid NRA Grenoble Overview ntroduction to local features Harris interest points + SSD ZNCC SFT Scale & affine invariant interest point detectors
nstance-level recognition: ocal invariant features Cordelia Schmid NRA Grenoble Overview ntroduction to local features Harris interest points + SSD ZNCC SFT Scale & affine invariant interest point detectors
Instance-level l recognition. Cordelia Schmid INRIA
 nstance-level l recognition Cordelia Schmid NRA nstance-level recognition Particular objects and scenes large databases Application Search photos on the web for particular places Find these landmars...in
nstance-level l recognition Cordelia Schmid NRA nstance-level recognition Particular objects and scenes large databases Application Search photos on the web for particular places Find these landmars...in
Keypoint extraction: Corners Harris Corners Pkwy, Charlotte, NC
 Kepoint etraction: Corners 9300 Harris Corners Pkw Charlotte NC Wh etract kepoints? Motivation: panorama stitching We have two images how do we combine them? Wh etract kepoints? Motivation: panorama stitching
Kepoint etraction: Corners 9300 Harris Corners Pkw Charlotte NC Wh etract kepoints? Motivation: panorama stitching We have two images how do we combine them? Wh etract kepoints? Motivation: panorama stitching
Instance-level l recognition. Cordelia Schmid & Josef Sivic INRIA
 nstance-level l recognition Cordelia Schmid & Josef Sivic NRA nstance-level recognition Particular objects and scenes large databases Application Search photos on the web for particular places Find these
nstance-level l recognition Cordelia Schmid & Josef Sivic NRA nstance-level recognition Particular objects and scenes large databases Application Search photos on the web for particular places Find these
INTEREST POINTS AT DIFFERENT SCALES
 INTEREST POINTS AT DIFFERENT SCALES Thank you for the slides. They come mostly from the following sources. Dan Huttenlocher Cornell U David Lowe U. of British Columbia Martial Hebert CMU Intuitively, junctions
INTEREST POINTS AT DIFFERENT SCALES Thank you for the slides. They come mostly from the following sources. Dan Huttenlocher Cornell U David Lowe U. of British Columbia Martial Hebert CMU Intuitively, junctions
Instance-level recognition: Local invariant features. Cordelia Schmid INRIA, Grenoble
 nstance-level recognition: ocal invariant features Cordelia Schmid NRA Grenoble Overview ntroduction to local features Harris interest points + SSD ZNCC SFT Scale & affine invariant interest point detectors
nstance-level recognition: ocal invariant features Cordelia Schmid NRA Grenoble Overview ntroduction to local features Harris interest points + SSD ZNCC SFT Scale & affine invariant interest point detectors
Perception III: Filtering, Edges, and Point-features
 Perception : Filtering, Edges, and Point-features Davide Scaramuzza Universit of Zurich Margarita Chli, Paul Furgale, Marco Hutter, Roland Siegwart 1 Toda s outline mage filtering Smoothing Edge detection
Perception : Filtering, Edges, and Point-features Davide Scaramuzza Universit of Zurich Margarita Chli, Paul Furgale, Marco Hutter, Roland Siegwart 1 Toda s outline mage filtering Smoothing Edge detection
Instance-level recognition: Local invariant features. Cordelia Schmid INRIA, Grenoble
 nstance-level recognition: ocal invariant features Cordelia Schmid NRA Grenoble Overview ntroduction to local features Harris interest t points + SSD ZNCC SFT Scale & affine invariant interest point detectors
nstance-level recognition: ocal invariant features Cordelia Schmid NRA Grenoble Overview ntroduction to local features Harris interest t points + SSD ZNCC SFT Scale & affine invariant interest point detectors
Optical flow. Subhransu Maji. CMPSCI 670: Computer Vision. October 20, 2016
 Optical flow Subhransu Maji CMPSC 670: Computer Vision October 20, 2016 Visual motion Man slides adapted from S. Seitz, R. Szeliski, M. Pollefes CMPSC 670 2 Motion and perceptual organization Sometimes,
Optical flow Subhransu Maji CMPSC 670: Computer Vision October 20, 2016 Visual motion Man slides adapted from S. Seitz, R. Szeliski, M. Pollefes CMPSC 670 2 Motion and perceptual organization Sometimes,
Motion estimation. Digital Visual Effects Yung-Yu Chuang. with slides by Michael Black and P. Anandan
 Motion estimation Digital Visual Effects Yung-Yu Chuang with slides b Michael Black and P. Anandan Motion estimation Parametric motion image alignment Tracking Optical flow Parametric motion direct method
Motion estimation Digital Visual Effects Yung-Yu Chuang with slides b Michael Black and P. Anandan Motion estimation Parametric motion image alignment Tracking Optical flow Parametric motion direct method
Interest Operators. All lectures are from posted research papers. Harris Corner Detector: the first and most basic interest operator
 Interest Operators All lectures are from posted research papers. Harris Corner Detector: the first and most basic interest operator SIFT interest point detector and region descriptor Kadir Entrop Detector
Interest Operators All lectures are from posted research papers. Harris Corner Detector: the first and most basic interest operator SIFT interest point detector and region descriptor Kadir Entrop Detector
Lecture 12. Local Feature Detection. Matching with Invariant Features. Why extract features? Why extract features? Why extract features?
 Lecture 1 Why extract eatures? Motivation: panorama stitching We have two images how do we combine them? Local Feature Detection Guest lecturer: Alex Berg Reading: Harris and Stephens David Lowe IJCV We
Lecture 1 Why extract eatures? Motivation: panorama stitching We have two images how do we combine them? Local Feature Detection Guest lecturer: Alex Berg Reading: Harris and Stephens David Lowe IJCV We
SIFT: Scale Invariant Feature Transform
 1 SIFT: Scale Invariant Feature Transform With slides from Sebastian Thrun Stanford CS223B Computer Vision, Winter 2006 3 Pattern Recognition Want to find in here SIFT Invariances: Scaling Rotation Illumination
1 SIFT: Scale Invariant Feature Transform With slides from Sebastian Thrun Stanford CS223B Computer Vision, Winter 2006 3 Pattern Recognition Want to find in here SIFT Invariances: Scaling Rotation Illumination
Image Processing 1 (IP1) Bildverarbeitung 1
 Bildverarbeitung 1") MIN-Fakultät Fachbereich Informatik Arbeitsbereich SAV/BV KOGS Image Processing 1 IP1 Bildverarbeitung 1 Lecture : Object Recognition Winter Semester 015/16 Slides: Prof. Bernd Neumann Slightly revised
MIN-Fakultät Fachbereich Informatik Arbeitsbereich SAV/BV KOGS Image Processing 1 IP1 Bildverarbeitung 1 Lecture : Object Recognition Winter Semester 015/16 Slides: Prof. Bernd Neumann Slightly revised
Lecture 05 Point Feature Detection and Matching
 nstitute of nformatics nstitute of Neuroinformatics Lecture 05 Point Feature Detection and Matching Davide Scaramuzza 1 Lab Eercise 3 - Toda afternoon Room ETH HG E 1.1 from 13:15 to 15:00 Wor description:
nstitute of nformatics nstitute of Neuroinformatics Lecture 05 Point Feature Detection and Matching Davide Scaramuzza 1 Lab Eercise 3 - Toda afternoon Room ETH HG E 1.1 from 13:15 to 15:00 Wor description:
Feature extraction: Corners and blobs
 Featre etraction: Corners and blobs Wh etract featres? Motiation: panorama stitching We hae two images how do we combine them? Wh etract featres? Motiation: panorama stitching We hae two images how do
Featre etraction: Corners and blobs Wh etract featres? Motiation: panorama stitching We hae two images how do we combine them? Wh etract featres? Motiation: panorama stitching We hae two images how do
Feature detectors and descriptors. Fei-Fei Li
 Feature detectors and descriptors Fei-Fei Li Feature Detection e.g. DoG detected points (~300) coordinates, neighbourhoods Feature Description e.g. SIFT local descriptors (invariant) vectors database of
Feature detectors and descriptors Fei-Fei Li Feature Detection e.g. DoG detected points (~300) coordinates, neighbourhoods Feature Description e.g. SIFT local descriptors (invariant) vectors database of
Feature detectors and descriptors. Fei-Fei Li
 Feature detectors and descriptors Fei-Fei Li Feature Detection e.g. DoG detected points (~300) coordinates, neighbourhoods Feature Description e.g. SIFT local descriptors (invariant) vectors database of
Feature detectors and descriptors Fei-Fei Li Feature Detection e.g. DoG detected points (~300) coordinates, neighbourhoods Feature Description e.g. SIFT local descriptors (invariant) vectors database of
Corners, Blobs & Descriptors. With slides from S. Lazebnik & S. Seitz, D. Lowe, A. Efros
 Corners, Blobs & Descriptors With slides from S. Lazebnik & S. Seitz, D. Lowe, A. Efros Motivation: Build a Panorama M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 How do we build panorama?
Corners, Blobs & Descriptors With slides from S. Lazebnik & S. Seitz, D. Lowe, A. Efros Motivation: Build a Panorama M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 How do we build panorama?
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil nfrastructure Eng. & Mgmt. Session 9- mage Detectors, Part Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering Lab e-mail:
CEE598 - Visual Sensing for Civil nfrastructure Eng. & Mgmt. Session 9- mage Detectors, Part Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering Lab e-mail:
Lecture 8: Interest Point Detection. Saad J Bedros
 #1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Last Lecture : Edge Detection Preprocessing of image is desired to eliminate or at least minimize noise effects There is always tradeoff
#1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Last Lecture : Edge Detection Preprocessing of image is desired to eliminate or at least minimize noise effects There is always tradeoff
Edges and Scale. Image Features. Detecting edges. Origin of Edges. Solution: smooth first. Effects of noise
 Edges and Scale Image Features From Sandlot Science Slides revised from S. Seitz, R. Szeliski, S. Lazebnik, etc. Origin of Edges surface normal discontinuity depth discontinuity surface color discontinuity
Edges and Scale Image Features From Sandlot Science Slides revised from S. Seitz, R. Szeliski, S. Lazebnik, etc. Origin of Edges surface normal discontinuity depth discontinuity surface color discontinuity
Feature extraction: Corners and blobs
 Feature extraction: Corners and blobs Review: Linear filtering and edge detection Name two different kinds of image noise Name a non-linear smoothing filter What advantages does median filtering have over
Feature extraction: Corners and blobs Review: Linear filtering and edge detection Name two different kinds of image noise Name a non-linear smoothing filter What advantages does median filtering have over
Lecture 7: Finding Features (part 2/2)
") Lecture 7: Finding Features (part 2/2) Professor Fei- Fei Li Stanford Vision Lab Lecture 7 -! 1 What we will learn today? Local invariant features MoHvaHon Requirements, invariances Keypoint localizahon
Lecture 7: Finding Features (part 2/2) Professor Fei- Fei Li Stanford Vision Lab Lecture 7 -! 1 What we will learn today? Local invariant features MoHvaHon Requirements, invariances Keypoint localizahon
Lecture 8: Interest Point Detection. Saad J Bedros
 #1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Review of Edge Detectors #2 Today s Lecture Interest Points Detection What do we mean with Interest Point Detection in an Image Goal:
#1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Review of Edge Detectors #2 Today s Lecture Interest Points Detection What do we mean with Interest Point Detection in an Image Goal:
Lecture 7: Finding Features (part 2/2)
") Lecture 7: Finding Features (part 2/2) Dr. Juan Carlos Niebles Stanford AI Lab Professor Fei- Fei Li Stanford Vision Lab 1 What we will learn today? Local invariant features MoPvaPon Requirements, invariances
Lecture 7: Finding Features (part 2/2) Dr. Juan Carlos Niebles Stanford AI Lab Professor Fei- Fei Li Stanford Vision Lab 1 What we will learn today? Local invariant features MoPvaPon Requirements, invariances
Advanced Features. Advanced Features: Topics. Jana Kosecka. Slides from: S. Thurn, D. Lowe, Forsyth and Ponce. Advanced features and feature matching
 Advanced Features Jana Kosecka Slides from: S. Thurn, D. Lowe, Forsyth and Ponce Advanced Features: Topics Advanced features and feature matching Template matching SIFT features Haar features 2 1 Features
Advanced Features Jana Kosecka Slides from: S. Thurn, D. Lowe, Forsyth and Ponce Advanced Features: Topics Advanced features and feature matching Template matching SIFT features Haar features 2 1 Features
Recap: edge detection. Source: D. Lowe, L. Fei-Fei
 Recap: edge detection Source: D. Lowe, L. Fei-Fei Canny edge detector 1. Filter image with x, y derivatives of Gaussian 2. Find magnitude and orientation of gradient 3. Non-maximum suppression: Thin multi-pixel
Recap: edge detection Source: D. Lowe, L. Fei-Fei Canny edge detector 1. Filter image with x, y derivatives of Gaussian 2. Find magnitude and orientation of gradient 3. Non-maximum suppression: Thin multi-pixel
Scale & Affine Invariant Interest Point Detectors
 Scale & Affine Invariant Interest Point Detectors Krystian Mikolajczyk and Cordelia Schmid Presented by Hunter Brown & Gaurav Pandey, February 19, 2009 Roadmap: Motivation Scale Invariant Detector Affine
Scale & Affine Invariant Interest Point Detectors Krystian Mikolajczyk and Cordelia Schmid Presented by Hunter Brown & Gaurav Pandey, February 19, 2009 Roadmap: Motivation Scale Invariant Detector Affine
Overview. Harris interest points. Comparing interest points (SSD, ZNCC, SIFT) Scale & affine invariant interest points
 Scale & affine invariant interest points") Overview Harris interest points Comparing interest points (SSD, ZNCC, SIFT) Scale & affine invariant interest points Evaluation and comparison of different detectors Region descriptors and their performance
Overview Harris interest points Comparing interest points (SSD, ZNCC, SIFT) Scale & affine invariant interest points Evaluation and comparison of different detectors Region descriptors and their performance
SIFT: SCALE INVARIANT FEATURE TRANSFORM BY DAVID LOWE
 SIFT: SCALE INVARIANT FEATURE TRANSFORM BY DAVID LOWE Overview Motivation of Work Overview of Algorithm Scale Space and Difference of Gaussian Keypoint Localization Orientation Assignment Descriptor Building
SIFT: SCALE INVARIANT FEATURE TRANSFORM BY DAVID LOWE Overview Motivation of Work Overview of Algorithm Scale Space and Difference of Gaussian Keypoint Localization Orientation Assignment Descriptor Building
Detectors part II Descriptors
 EECS 442 Computer vision Detectors part II Descriptors Blob detectors Invariance Descriptors Some slides of this lectures are courtesy of prof F. Li, prof S. Lazebnik, and various other lecturers Goal:
EECS 442 Computer vision Detectors part II Descriptors Blob detectors Invariance Descriptors Some slides of this lectures are courtesy of prof F. Li, prof S. Lazebnik, and various other lecturers Goal:
Overview. Introduction to local features. Harris interest points + SSD, ZNCC, SIFT. Evaluation and comparison of different detectors
 Overview Introduction to local features Harris interest points + SSD, ZNCC, SIFT Scale & affine invariant interest point detectors Evaluation and comparison of different detectors Region descriptors and
Overview Introduction to local features Harris interest points + SSD, ZNCC, SIFT Scale & affine invariant interest point detectors Evaluation and comparison of different detectors Region descriptors and
Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems
 Robots for People --- A project for intelligent integrated systems") 1 Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems V. Estivill-Castro 2 Perception Concepts Vision Chapter 4 (textbook) Sections 4.3 to 4.5 What is the course
1 Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems V. Estivill-Castro 2 Perception Concepts Vision Chapter 4 (textbook) Sections 4.3 to 4.5 What is the course
Blob Detection CSC 767
 Blob Detection CSC 767 Blob detection Slides: S. Lazebnik Feature detection with scale selection We want to extract features with characteristic scale that is covariant with the image transformation Blob
Blob Detection CSC 767 Blob detection Slides: S. Lazebnik Feature detection with scale selection We want to extract features with characteristic scale that is covariant with the image transformation Blob
Maximally Stable Local Description for Scale Selection
 Maximally Stable Local Description for Scale Selection Gyuri Dorkó and Cordelia Schmid INRIA Rhône-Alpes, 655 Avenue de l Europe, 38334 Montbonnot, France {gyuri.dorko,cordelia.schmid}@inrialpes.fr Abstract.
Maximally Stable Local Description for Scale Selection Gyuri Dorkó and Cordelia Schmid INRIA Rhône-Alpes, 655 Avenue de l Europe, 38334 Montbonnot, France {gyuri.dorko,cordelia.schmid}@inrialpes.fr Abstract.
Image Analysis. Feature extraction: corners and blobs
 Image Analysis Feature extraction: corners and blobs Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Svetlana Lazebnik, University of North Carolina at Chapel Hill (http://www.cs.unc.edu/~lazebnik/spring10/).
Image Analysis Feature extraction: corners and blobs Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Svetlana Lazebnik, University of North Carolina at Chapel Hill (http://www.cs.unc.edu/~lazebnik/spring10/).
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely Lecture 5: Feature descriptors and matching Szeliski: 4.1 Reading Announcements Project 1 Artifacts due tomorrow, Friday 2/17, at 11:59pm Project 2 will be released
CS5670: Computer Vision Noah Snavely Lecture 5: Feature descriptors and matching Szeliski: 4.1 Reading Announcements Project 1 Artifacts due tomorrow, Friday 2/17, at 11:59pm Project 2 will be released
* h + = Lec 05: Interesting Points Detection. Image Analysis & Retrieval. Outline. Image Filtering. Recap of Lec 04 Image Filtering Edge Features
 age Analsis & Retrieval Outline CS/EE 5590 Special Topics (Class ds: 44873, 44874) Fall 06, M/W 4-5:5p@Bloch 00 Lec 05: nteresting Points Detection Recap of Lec 04 age Filtering Edge Features Hoework Harris
age Analsis & Retrieval Outline CS/EE 5590 Special Topics (Class ds: 44873, 44874) Fall 06, M/W 4-5:5p@Bloch 00 Lec 05: nteresting Points Detection Recap of Lec 04 age Filtering Edge Features Hoework Harris
Computer Vision I. Announcements
 Announcements Motion II No class Wednesda (Happ Thanksgiving) HW4 will be due Frida 1/8 Comment on Non-maximal supression CSE5A Lecture 15 Shi-Tomasi Corner Detector Filter image with a Gaussian. Compute
Announcements Motion II No class Wednesda (Happ Thanksgiving) HW4 will be due Frida 1/8 Comment on Non-maximal supression CSE5A Lecture 15 Shi-Tomasi Corner Detector Filter image with a Gaussian. Compute
Optical Flow, Motion Segmentation, Feature Tracking
 BIL 719 - Computer Vision May 21, 2014 Optical Flow, Motion Segmentation, Feature Tracking Aykut Erdem Dept. of Computer Engineering Hacettepe University Motion Optical Flow Motion Segmentation Feature
BIL 719 - Computer Vision May 21, 2014 Optical Flow, Motion Segmentation, Feature Tracking Aykut Erdem Dept. of Computer Engineering Hacettepe University Motion Optical Flow Motion Segmentation Feature
EE 6882 Visual Search Engine
 EE 6882 Visual Search Engine Prof. Shih Fu Chang, Feb. 13 th 2012 Lecture #4 Local Feature Matching Bag of Word image representation: coding and pooling (Many slides from A. Efors, W. Freeman, C. Kambhamettu,
EE 6882 Visual Search Engine Prof. Shih Fu Chang, Feb. 13 th 2012 Lecture #4 Local Feature Matching Bag of Word image representation: coding and pooling (Many slides from A. Efors, W. Freeman, C. Kambhamettu,
Overview. Introduction to local features. Harris interest points + SSD, ZNCC, SIFT. Evaluation and comparison of different detectors
 Overview Introduction to local features Harris interest points + SSD, ZNCC, SIFT Scale & affine invariant interest point detectors Evaluation and comparison of different detectors Region descriptors and
Overview Introduction to local features Harris interest points + SSD, ZNCC, SIFT Scale & affine invariant interest point detectors Evaluation and comparison of different detectors Region descriptors and
SIFT keypoint detection. D. Lowe, Distinctive image features from scale-invariant keypoints, IJCV 60 (2), pp , 2004.
, pp , 2004.") SIFT keypoint detection D. Lowe, Distinctive image features from scale-invariant keypoints, IJCV 60 (), pp. 91-110, 004. Keypoint detection with scale selection We want to extract keypoints with characteristic
SIFT keypoint detection D. Lowe, Distinctive image features from scale-invariant keypoints, IJCV 60 (), pp. 91-110, 004. Keypoint detection with scale selection We want to extract keypoints with characteristic
Image Alignment and Mosaicing
 Image Alignment and Mosaicing Image Alignment Applications Local alignment: Tracking Stereo Global alignment: Camera jitter elimination Image enhancement Panoramic mosaicing Image Enhancement Original
Image Alignment and Mosaicing Image Alignment Applications Local alignment: Tracking Stereo Global alignment: Camera jitter elimination Image enhancement Panoramic mosaicing Image Enhancement Original
Harris Corner Detector
 Multimedia Computing: Algorithms, Systems, and Applications: Feature Extraction By Dr. Yu Cao Department of Computer Science The University of Massachusetts Lowell Lowell, MA 01854, USA Part of the slides
Multimedia Computing: Algorithms, Systems, and Applications: Feature Extraction By Dr. Yu Cao Department of Computer Science The University of Massachusetts Lowell Lowell, MA 01854, USA Part of the slides
Advances in Computer Vision. Prof. Bill Freeman. Image and shape descriptors. Readings: Mikolajczyk and Schmid; Belongie et al.
 6.869 Advances in Computer Vision Prof. Bill Freeman March 3, 2005 Image and shape descriptors Affine invariant features Comparison of feature descriptors Shape context Readings: Mikolajczyk and Schmid;
6.869 Advances in Computer Vision Prof. Bill Freeman March 3, 2005 Image and shape descriptors Affine invariant features Comparison of feature descriptors Shape context Readings: Mikolajczyk and Schmid;
Kernel Density Topic Models: Visual Topics Without Visual Words
 Kernel Density Topic Models: Visual Topics Without Visual Words Konstantinos Rematas K.U. Leuven ESAT-iMinds krematas@esat.kuleuven.be Mario Fritz Max Planck Institute for Informatics mfrtiz@mpi-inf.mpg.de
Kernel Density Topic Models: Visual Topics Without Visual Words Konstantinos Rematas K.U. Leuven ESAT-iMinds krematas@esat.kuleuven.be Mario Fritz Max Planck Institute for Informatics mfrtiz@mpi-inf.mpg.de
CSE 473/573 Computer Vision and Image Processing (CVIP)
") CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Lecture 11 Local Features 1 Schedule Last class We started local features Today More on local features Readings for
CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Lecture 11 Local Features 1 Schedule Last class We started local features Today More on local features Readings for
Announcements. Tracking. Comptuer Vision I. The Motion Field. = ω. Pure Translation. Motion Field Equation. Rigid Motion: General Case
 Announcements Tracking Computer Vision I CSE5A Lecture 17 HW 3 due toda HW 4 will be on web site tomorrow: Face recognition using 3 techniques Toda: Tracking Reading: Sections 17.1-17.3 The Motion Field
Announcements Tracking Computer Vision I CSE5A Lecture 17 HW 3 due toda HW 4 will be on web site tomorrow: Face recognition using 3 techniques Toda: Tracking Reading: Sections 17.1-17.3 The Motion Field
SURF Features. Jacky Baltes Dept. of Computer Science University of Manitoba WWW:
 SURF Features Jacky Baltes Dept. of Computer Science University of Manitoba Email: jacky@cs.umanitoba.ca WWW: http://www.cs.umanitoba.ca/~jacky Salient Spatial Features Trying to find interest points Points
SURF Features Jacky Baltes Dept. of Computer Science University of Manitoba Email: jacky@cs.umanitoba.ca WWW: http://www.cs.umanitoba.ca/~jacky Salient Spatial Features Trying to find interest points Points
Image matching. by Diva Sian. by swashford
 Image matching by Diva Sian by swashford Harder case by Diva Sian by scgbt Invariant local features Find features that are invariant to transformations geometric invariance: translation, rotation, scale
Image matching by Diva Sian by swashford Harder case by Diva Sian by scgbt Invariant local features Find features that are invariant to transformations geometric invariance: translation, rotation, scale
CS 3710: Visual Recognition Describing Images with Features. Adriana Kovashka Department of Computer Science January 8, 2015
 CS 3710: Visual Recognition Describing Images with Features Adriana Kovashka Department of Computer Science January 8, 2015 Plan for Today Presentation assignments + schedule changes Image filtering Feature
CS 3710: Visual Recognition Describing Images with Features Adriana Kovashka Department of Computer Science January 8, 2015 Plan for Today Presentation assignments + schedule changes Image filtering Feature
Blobs & Scale Invariance
 Blobs & Scale Invariance Prof. Didier Stricker Doz. Gabriele Bleser Computer Vision: Object and People Tracking With slides from Bebis, S. Lazebnik & S. Seitz, D. Lowe, A. Efros 1 Apertizer: some videos
Blobs & Scale Invariance Prof. Didier Stricker Doz. Gabriele Bleser Computer Vision: Object and People Tracking With slides from Bebis, S. Lazebnik & S. Seitz, D. Lowe, A. Efros 1 Apertizer: some videos
Extract useful building blocks: blobs. the same image like for the corners
 Extract useful building blocks: blobs the same image like for the corners Here were the corners... Blob detection in 2D Laplacian of Gaussian: Circularly symmetric operator for blob detection in 2D 2 g=
Extract useful building blocks: blobs the same image like for the corners Here were the corners... Blob detection in 2D Laplacian of Gaussian: Circularly symmetric operator for blob detection in 2D 2 g=
Edge Detection. CS 650: Computer Vision
 CS 650: Computer Vision Edges and Gradients Edge: local indication of an object transition Edge detection: local operators that find edges (usually involves convolution) Local intensity transitions are
CS 650: Computer Vision Edges and Gradients Edge: local indication of an object transition Edge detection: local operators that find edges (usually involves convolution) Local intensity transitions are
Achieving scale covariance
 Achieving scale covariance Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region size that is covariant
Achieving scale covariance Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region size that is covariant
Introduction to motion correspondence
 Introduction to motion correspondence 1 IPAM - UCLA July 24, 2013 Iasonas Kokkinos Center for Visual Computing Ecole Centrale Paris / INRIA Saclay Why estimate visual motion? 2 Tracking Segmentation Structure
Introduction to motion correspondence 1 IPAM - UCLA July 24, 2013 Iasonas Kokkinos Center for Visual Computing Ecole Centrale Paris / INRIA Saclay Why estimate visual motion? 2 Tracking Segmentation Structure
LoG Blob Finding and Scale. Scale Selection. Blobs (and scale selection) Achieving scale covariance. Blob detection in 2D. Blob detection in 2D
 Achieving scale covariance. Blob detection in 2D. Blob detection in 2D") Achieving scale covariance Blobs (and scale selection) Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region
Achieving scale covariance Blobs (and scale selection) Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region
Scale-space image processing
 Scale-space image processing Corresponding image features can appear at different scales Like shift-invariance, scale-invariance of image processing algorithms is often desirable. Scale-space representation
Scale-space image processing Corresponding image features can appear at different scales Like shift-invariance, scale-invariance of image processing algorithms is often desirable. Scale-space representation
Rapid Object Recognition from Discriminative Regions of Interest
 Rapid Object Recognition from Discriminative Regions of Interest Gerald Fritz, Christin Seifert, Lucas Paletta JOANNEUM RESEARCH Institute of Digital Image Processing Wastiangasse 6, A-81 Graz, Austria
Rapid Object Recognition from Discriminative Regions of Interest Gerald Fritz, Christin Seifert, Lucas Paletta JOANNEUM RESEARCH Institute of Digital Image Processing Wastiangasse 6, A-81 Graz, Austria
Invariant local features. Invariant Local Features. Classes of transformations. (Good) invariant local features. Case study: panorama stitching
 invariant local features. Case study: panorama stitching") Invariant local eatures Invariant Local Features Tuesday, February 6 Subset o local eature types designed to be invariant to Scale Translation Rotation Aine transormations Illumination 1) Detect distinctive
Invariant local eatures Invariant Local Features Tuesday, February 6 Subset o local eature types designed to be invariant to Scale Translation Rotation Aine transormations Illumination 1) Detect distinctive
Lucas-Kanade Optical Flow. Computer Vision Carnegie Mellon University (Kris Kitani)
") Lucas-Kanade Optical Flow Computer Vision 16-385 Carnegie Mellon University (Kris Kitani) I x u + I y v + I t =0 I x = @I @x I y = @I u = dx v = dy I @y t = @I dt dt @t spatial derivative optical flow
Lucas-Kanade Optical Flow Computer Vision 16-385 Carnegie Mellon University (Kris Kitani) I x u + I y v + I t =0 I x = @I @x I y = @I u = dx v = dy I @y t = @I dt dt @t spatial derivative optical flow
Image Alignment and Mosaicing Feature Tracking and the Kalman Filter
 Image Alignment and Mosaicing Feature Tracking and the Kalman Filter Image Alignment Applications Local alignment: Tracking Stereo Global alignment: Camera jitter elimination Image enhancement Panoramic
Image Alignment and Mosaicing Feature Tracking and the Kalman Filter Image Alignment Applications Local alignment: Tracking Stereo Global alignment: Camera jitter elimination Image enhancement Panoramic
Wavelet-based Salient Points with Scale Information for Classification
 Wavelet-based Salient Points with Scale Information for Classification Alexandra Teynor and Hans Burkhardt Department of Computer Science, Albert-Ludwigs-Universität Freiburg, Germany {teynor, Hans.Burkhardt}@informatik.uni-freiburg.de
Wavelet-based Salient Points with Scale Information for Classification Alexandra Teynor and Hans Burkhardt Department of Computer Science, Albert-Ludwigs-Universität Freiburg, Germany {teynor, Hans.Burkhardt}@informatik.uni-freiburg.de
MAXIMA & MINIMA The single-variable definitions and theorems relating to extermals can be extended to apply to multivariable calculus.
 MAXIMA & MINIMA The single-variable definitions and theorems relating to etermals can be etended to appl to multivariable calculus. ( ) is a Relative Maimum if there ( ) such that ( ) f(, for all points
MAXIMA & MINIMA The single-variable definitions and theorems relating to etermals can be etended to appl to multivariable calculus. ( ) is a Relative Maimum if there ( ) such that ( ) f(, for all points
Corner detection: the basic idea
 Corner detection: the basic idea At a corner, shifting a window in any direction should give a large change in intensity flat region: no change in all directions edge : no change along the edge direction
Corner detection: the basic idea At a corner, shifting a window in any direction should give a large change in intensity flat region: no change in all directions edge : no change along the edge direction
Semi-Supervised Laplacian Regularization of Kernel Canonical Correlation Analysis
 Semi-Supervised Laplacian Regularization of Kernel Canonical Correlation Analsis Matthew B. Blaschko, Christoph H. Lampert, & Arthur Gretton Ma Planck Institute for Biological Cbernetics Tübingen, German
Semi-Supervised Laplacian Regularization of Kernel Canonical Correlation Analsis Matthew B. Blaschko, Christoph H. Lampert, & Arthur Gretton Ma Planck Institute for Biological Cbernetics Tübingen, German
Visual Object Recognition
 Visual Object Recognition Lecture 2: Image Formation Per-Erik Forssén, docent Computer Vision Laboratory Department of Electrical Engineering Linköping University Lecture 2: Image Formation Pin-hole, and
Visual Object Recognition Lecture 2: Image Formation Per-Erik Forssén, docent Computer Vision Laboratory Department of Electrical Engineering Linköping University Lecture 2: Image Formation Pin-hole, and
Lesson Goals. Unit 2 Functions Analyzing Graphs of Functions (Unit 2.2) Graph of a Function. Lesson Goals
 Graph of a Function. Lesson Goals") Unit Functions Analzing Graphs of Functions (Unit.) William (Bill) Finch Mathematics Department Denton High School Lesson Goals When ou have completed this lesson ou will: Find the domain and range of
Unit Functions Analzing Graphs of Functions (Unit.) William (Bill) Finch Mathematics Department Denton High School Lesson Goals When ou have completed this lesson ou will: Find the domain and range of
Edge Detection. Image Processing - Computer Vision
 Image Processing - Lesson 10 Edge Detection Image Processing - Computer Vision Low Level Edge detection masks Gradient Detectors Compass Detectors Second Derivative - Laplace detectors Edge Linking Image
Image Processing - Lesson 10 Edge Detection Image Processing - Computer Vision Low Level Edge detection masks Gradient Detectors Compass Detectors Second Derivative - Laplace detectors Edge Linking Image
INF Introduction to classifiction Anne Solberg Based on Chapter 2 ( ) in Duda and Hart: Pattern Classification
 in Duda and Hart: Pattern Classification") INF 4300 151014 Introduction to classifiction Anne Solberg anne@ifiuiono Based on Chapter 1-6 in Duda and Hart: Pattern Classification 151014 INF 4300 1 Introduction to classification One of the most challenging
INF 4300 151014 Introduction to classifiction Anne Solberg anne@ifiuiono Based on Chapter 1-6 in Duda and Hart: Pattern Classification 151014 INF 4300 1 Introduction to classification One of the most challenging
EPIPOLAR GEOMETRY WITH MANY DETAILS
 EPIPOLAR GEOMERY WIH MANY DEAILS hank ou for the slides. he come mostl from the following source. Marc Pollefes U. of North Carolina hree questions: (i) Correspondence geometr: Given an image point in
EPIPOLAR GEOMERY WIH MANY DEAILS hank ou for the slides. he come mostl from the following source. Marc Pollefes U. of North Carolina hree questions: (i) Correspondence geometr: Given an image point in
Motion Estimation (I) Ce Liu Microsoft Research New England
 Ce Liu Microsoft Research New England") Motion Estimation (I) Ce Liu celiu@microsoft.com Microsoft Research New England We live in a moving world Perceiving, understanding and predicting motion is an important part of our daily lives Motion
Motion Estimation (I) Ce Liu celiu@microsoft.com Microsoft Research New England We live in a moving world Perceiving, understanding and predicting motion is an important part of our daily lives Motion
Optical Flow, KLT Feature Tracker.
 Optical Flow, KL Feature racker E-mail: hogijung@hanang.ac.kr Motion in Computer Vision Motion Structure rom motion Detection/segmentation with direction [1] E-mail: hogijung@hanang.ac.kr Motion Field.s..
Optical Flow, KL Feature racker E-mail: hogijung@hanang.ac.kr Motion in Computer Vision Motion Structure rom motion Detection/segmentation with direction [1] E-mail: hogijung@hanang.ac.kr Motion Field.s..
6/9/2010. Feature-based methods and shape retrieval problems. Structure. Combining local and global structures. Photometric stress
 1 2 Structure Feature-based methods and shape retrieval problems Global Metric Local Feature descriptors Alexander & Michael Bronstein, 2006-2009 Michael Bronstein, 2010 tosca.cs.technion.ac.il/book 048921
1 2 Structure Feature-based methods and shape retrieval problems Global Metric Local Feature descriptors Alexander & Michael Bronstein, 2006-2009 Michael Bronstein, 2010 tosca.cs.technion.ac.il/book 048921
EECS150 - Digital Design Lecture 15 SIFT2 + FSM. Recap and Outline
 EECS150 - Digital Design Lecture 15 SIFT2 + FSM Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
EECS150 - Digital Design Lecture 15 SIFT2 + FSM Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
Feature Tracking. 2/27/12 ECEn 631
 Corner Extraction Feature Tracking Mostly for multi-frame applications Object Tracking Motion detection Image matching Image mosaicing 3D modeling Object recognition Homography estimation... Global Features
Corner Extraction Feature Tracking Mostly for multi-frame applications Object Tracking Motion detection Image matching Image mosaicing 3D modeling Object recognition Homography estimation... Global Features
Motion Estimation (I)
") Motion Estimation (I) Ce Liu celiu@microsoft.com Microsoft Research New England We live in a moving world Perceiving, understanding and predicting motion is an important part of our daily lives Motion
Motion Estimation (I) Ce Liu celiu@microsoft.com Microsoft Research New England We live in a moving world Perceiving, understanding and predicting motion is an important part of our daily lives Motion
Derivatives 2: The Derivative at a Point
 Derivatives 2: The Derivative at a Point 69 Derivatives 2: The Derivative at a Point Model 1: Review of Velocit In the previous activit we eplored position functions (distance versus time) and learned
Derivatives 2: The Derivative at a Point 69 Derivatives 2: The Derivative at a Point Model 1: Review of Velocit In the previous activit we eplored position functions (distance versus time) and learned
Iterative Image Registration: Lucas & Kanade Revisited. Kentaro Toyama Vision Technology Group Microsoft Research
 Iterative Image Registration: Lucas & Kanade Revisited Kentaro Toyama Vision Technology Group Microsoft Research Every writer creates his own precursors. His work modifies our conception of the past, as
Iterative Image Registration: Lucas & Kanade Revisited Kentaro Toyama Vision Technology Group Microsoft Research Every writer creates his own precursors. His work modifies our conception of the past, as
Scale & Affine Invariant Interest Point Detectors
 Scale & Affine Invariant Interest Point Detectors KRYSTIAN MIKOLAJCZYK AND CORDELIA SCHMID [2004] Shreyas Saxena Gurkirit Singh 23/11/2012 Introduction We are interested in finding interest points. What
Scale & Affine Invariant Interest Point Detectors KRYSTIAN MIKOLAJCZYK AND CORDELIA SCHMID [2004] Shreyas Saxena Gurkirit Singh 23/11/2012 Introduction We are interested in finding interest points. What
Computer Vision & Digital Image Processing
 Computer Vision & Digital Image Processing Image Segmentation Dr. D. J. Jackson Lecture 6- Image segmentation Segmentation divides an image into its constituent parts or objects Level of subdivision depends
Computer Vision & Digital Image Processing Image Segmentation Dr. D. J. Jackson Lecture 6- Image segmentation Segmentation divides an image into its constituent parts or objects Level of subdivision depends
Style-aware Mid-level Representation for Discovering Visual Connections in Space and Time
 Style-aware Mid-level Representation for Discovering Visual Connections in Space and Time Experiment presentation for CS3710:Visual Recognition Presenter: Zitao Liu University of Pittsburgh ztliu@cs.pitt.edu
Style-aware Mid-level Representation for Discovering Visual Connections in Space and Time Experiment presentation for CS3710:Visual Recognition Presenter: Zitao Liu University of Pittsburgh ztliu@cs.pitt.edu
Probabilistic Latent Semantic Analysis
 Probabilistic Latent Semantic Analysis Dan Oneaţă 1 Introduction Probabilistic Latent Semantic Analysis (plsa) is a technique from the category of topic models. Its main goal is to model cooccurrence information
Probabilistic Latent Semantic Analysis Dan Oneaţă 1 Introduction Probabilistic Latent Semantic Analysis (plsa) is a technique from the category of topic models. Its main goal is to model cooccurrence information
Video and Motion Analysis Computer Vision Carnegie Mellon University (Kris Kitani)
") Video and Motion Analysis 16-385 Computer Vision Carnegie Mellon University (Kris Kitani) Optical flow used for feature tracking on a drone Interpolated optical flow used for super slow-mo optical flow
Video and Motion Analysis 16-385 Computer Vision Carnegie Mellon University (Kris Kitani) Optical flow used for feature tracking on a drone Interpolated optical flow used for super slow-mo optical flow
Distinguish between different types of scenes. Matching human perception Understanding the environment
 Scene Recognition Adriana Kovashka UTCS, PhD student Problem Statement Distinguish between different types of scenes Applications Matching human perception Understanding the environment Indexing of images
Scene Recognition Adriana Kovashka UTCS, PhD student Problem Statement Distinguish between different types of scenes Applications Matching human perception Understanding the environment Indexing of images
Elaborazione delle Immagini Informazione multimediale - Immagini. Raffaella Lanzarotti
 Elaborazione delle Immagini Informazione multimediale - Immagini Raffaella Lanzarotti OPTICAL FLOW Thanks to prof. Mubarak Shah,UCF 2 Video Video: sequence of frames (images) catch in the time Data: function
Elaborazione delle Immagini Informazione multimediale - Immagini Raffaella Lanzarotti OPTICAL FLOW Thanks to prof. Mubarak Shah,UCF 2 Video Video: sequence of frames (images) catch in the time Data: function
Computer Vision Motion
 Computer Vision Motion Professor Hager http://www.cs.jhu.edu/~hager 12/1/12 CS 461, Copyright G.D. Hager Outline From Stereo to Motion The motion field and optical flow (2D motion) Factorization methods
Computer Vision Motion Professor Hager http://www.cs.jhu.edu/~hager 12/1/12 CS 461, Copyright G.D. Hager Outline From Stereo to Motion The motion field and optical flow (2D motion) Factorization methods
Unit 10 - Graphing Quadratic Functions
 Unit - Graphing Quadratic Functions PREREQUISITE SKILLS: students should be able to add, subtract and multipl polnomials students should be able to factor polnomials students should be able to identif
Unit - Graphing Quadratic Functions PREREQUISITE SKILLS: students should be able to add, subtract and multipl polnomials students should be able to factor polnomials students should be able to identif
Covariance Tracking Algorithm on Bilateral Filtering under Lie Group Structure Yinghong Xie 1,2,a Chengdong Wu 1,b
 Applied Mechanics and Materials Online: 014-0-06 ISSN: 166-748, Vols. 519-50, pp 684-688 doi:10.408/www.scientific.net/amm.519-50.684 014 Trans Tech Publications, Switzerland Covariance Tracking Algorithm
Applied Mechanics and Materials Online: 014-0-06 ISSN: 166-748, Vols. 519-50, pp 684-688 doi:10.408/www.scientific.net/amm.519-50.684 014 Trans Tech Publications, Switzerland Covariance Tracking Algorithm
= x. Algebra II Notes Quadratic Functions Unit Graphing Quadratic Functions. Math Background
 Algebra II Notes Quadratic Functions Unit 3.1 3. Graphing Quadratic Functions Math Background Previousl, ou Identified and graphed linear functions Applied transformations to parent functions Graphed quadratic
Algebra II Notes Quadratic Functions Unit 3.1 3. Graphing Quadratic Functions Math Background Previousl, ou Identified and graphed linear functions Applied transformations to parent functions Graphed quadratic
Given a feature in I 1, how to find the best match in I 2?
 Feature Matching 1 Feature matching Given a feature in I 1, how to find the best match in I 2? 1. Define distance function that compares two descriptors 2. Test all the features in I 2, find the one with
Feature Matching 1 Feature matching Given a feature in I 1, how to find the best match in I 2? 1. Define distance function that compares two descriptors 2. Test all the features in I 2, find the one with
Clustering with k-means and Gaussian mixture distributions
 Clustering with k-means and Gaussian mixture distributions Machine Learning and Category Representation 2012-2013 Jakob Verbeek, ovember 23, 2012 Course website: http://lear.inrialpes.fr/~verbeek/mlcr.12.13
Clustering with k-means and Gaussian mixture distributions Machine Learning and Category Representation 2012-2013 Jakob Verbeek, ovember 23, 2012 Course website: http://lear.inrialpes.fr/~verbeek/mlcr.12.13
6. Vector Random Variables
 6. Vector Random Variables In the previous chapter we presented methods for dealing with two random variables. In this chapter we etend these methods to the case of n random variables in the following
6. Vector Random Variables In the previous chapter we presented methods for dealing with two random variables. In this chapter we etend these methods to the case of n random variables in the following
Feature detection.
 Feature detection Kim Steenstrup Pedersen kimstp@itu.dk The IT University of Copenhagen Feature detection, The IT University of Copenhagen p.1/20 What is a feature? Features can be thought of as symbolic
Feature detection Kim Steenstrup Pedersen kimstp@itu.dk The IT University of Copenhagen Feature detection, The IT University of Copenhagen p.1/20 What is a feature? Features can be thought of as symbolic
Riemannian Metric Learning for Symmetric Positive Definite Matrices
 CMSC 88J: Linear Subspaces and Manifolds for Computer Vision and Machine Learning Riemannian Metric Learning for Symmetric Positive Definite Matrices Raviteja Vemulapalli Guide: Professor David W. Jacobs
CMSC 88J: Linear Subspaces and Manifolds for Computer Vision and Machine Learning Riemannian Metric Learning for Symmetric Positive Definite Matrices Raviteja Vemulapalli Guide: Professor David W. Jacobs
CS4670: Computer Vision Kavita Bala. Lecture 7: Harris Corner Detec=on
 CS4670: Computer Vision Kavita Bala Lecture 7: Harris Corner Detec=on Announcements HW 1 will be out soon Sign up for demo slots for PA 1 Remember that both partners have to be there We will ask you to
CS4670: Computer Vision Kavita Bala Lecture 7: Harris Corner Detec=on Announcements HW 1 will be out soon Sign up for demo slots for PA 1 Remember that both partners have to be there We will ask you to
4. References. words, the pseudo Laplacian is given by max {! 2 x,! 2 y}.
 words, the pseudo Laplacian is given by ma {! 2,! 2 y}. 4. References [Ar72] Arbib, M.A., The Metaphorical Brain, John Wiley, New York, 1972. [BB82] Ballard, D. H. and Brown, C. M., Computer Vision, Prentice-Hall,
words, the pseudo Laplacian is given by ma {! 2,! 2 y}. 4. References [Ar72] Arbib, M.A., The Metaphorical Brain, John Wiley, New York, 1972. [BB82] Ballard, D. H. and Brown, C. M., Computer Vision, Prentice-Hall,