Image Alignment and Mosaicing
|
|
|
- Reynold Russell
- 5 years ago
- Views:
Transcription
1 Image Alignment and Mosaicing
2 Image Alignment Applications Local alignment: Tracking Stereo Global alignment: Camera jitter elimination Image enhancement Panoramic mosaicing

3 Image Enhancement Original Enhanced Anandan

4 Panoramic Mosaicing Anandan


5 Gigapixel panoramas & images Mapping / Tourism / WWT Medical Imaging [Szeliski]
6 Panoramic Mosaicing 1. Align images 2. Merge overlapping regions Anandan
7 Correspondence Approaches Optical flow Correlation Correlation + optical flow Any of the above, iterated (e.g. Lucas-Kanade) Any of the above, coarse-to-fine Feature matching + RANSAC

8 Correspondence Approaches Optical flow Correlation Correlation + optical flow Any of the above, iterated (e.g. Lucas-Kanade) Any of the above, coarse-to-fine Feature matching + RANSAC
9 Optical Flow for Image Registration Compute local matches Least-squares fit to motion model Problem: outliers
")
10 Outlier Rejection Robust estimation: tolerant of outliers In general, methods based on absolute value rather than square: minimize Σ x i -f, not Σ(x i -f ) 2
11 Correspondence Approaches Optical flow Correlation Correlation + optical flow Any of the above, iterated (e.g. Lucas-Kanade) Any of the above, coarse-to-fine Feature matching + RANSAC
 = ψ 1 2 i j ( I ( i, j), I ( i t, j )) x t y Select translation that maximizes c Depending on window size, local or")
12 Correlation / Search Methods Assume translation only Given images I 1, I 2 For each translation (t x, t y ) compute c( I1, I 2, t) = ψ 1 2 i j ( I ( i, j), I ( i t, j )) x t y Select translation that maximizes c Depending on window size, local or global
13 Cross-Correlation Statistical definition of correlation: ψ ( u, v) = uv Disadvantage: sensitive to local variations in image brightness


 u = average (")
14 Normalized Cross-Correlation Normalize to eliminate brightness sensitivity: where ψ ( u, v) = ( u u )( v σ σ u v v) u = average ( u) σ u = standard deviation ( u)
15 Sum of Squared Differences More intuitive measure: ψ ( u, v) = ( u v) 2 Negative: higher values greater similarity Expand: ( u v) = u v + 2uv
16 Local vs. Global Correlation with local windows not too expensive High cost if window size = whole image But computation looks like convolution FFT to the rescue!
17 Fourier Transform with Translation F ( f ( x + x, y + y) ) = F ( f ( x, y) ) e i( ω x+ ω y) x y
 ( ) ( ) ) ( 2 1 ) ( 2 1 ), ( ), ( y x i y x i y x y x e F F e y x I y x I + + = = ω ω ω ω")
18 Fourier Transform with Translation Therefore, if I 1 and I 2 differ by translation, So, F -1 (F 1 /F 2 ) will have a peak at ( x, y) ( ) ( ) ) ( 2 1 ) ( 2 1 ), ( ), ( y x i y x i y x y x e F F e y x I y x I + + = = ω ω ω ω F F

19 Phase Correlation In practice, use cross power spectrum F F 1 F F 1 * 2 * 2 Compute inverse FFT, look for peaks [Kuglin & Hines 1975]
20 Phase Correlation Advantages Fast computation Low sensitivity to global brightness changes (since equally sensitive to all frequencies)
21 Phase Correlation Disadvantages Sensitive to white noise No robust version Translation only Extensions to rotation, scale But not local motion Not too bad in practice with small local motions
22 Correspondence Approaches Optical flow Correlation Correlation + optical flow Any of the above, iterated (e.g. Lucas-Kanade) Any of the above, coarse-to-fine Feature matching + RANSAC
23 Correlation plus Optical Flow Use e.g. phase correlation to find average translation (may be large) Use optical flow to find local motions
24 Correspondence Approaches Optical flow Correlation Correlation + optical flow Any of the above, iterated (e.g. Lucas-Kanade) Any of the above, coarse-to-fine Feature matching + RANSAC
25 Correspondence Approaches Optical flow Correlation Correlation + optical flow Any of the above, iterated (e.g. Lucas-Kanade) Any of the above, coarse-to-fine Feature matching + RANSAC
26 Image Pyramids Pre-filter images to collect information at different scales More efficient computation, allows larger motions

27 Image Pyramids Szeliski
28 Correspondence Approaches Optical flow Correlation Correlation + optical flow Any of the above, iterated (e.g. Lucas-Kanade) Any of the above, coarse-to-fine Feature matching + RANSAC
29 Matching features What do we do about the bad matches? [Szeliski]

30 RAndom SAmple Consensus Select one match, count inliers [Szeliski]
31 RAndom SAmple Consensus Select one match, count inliers [Szeliski]
32 Least squares fit Find average translation vector [Szeliski]
33 Panoramic Mosaicing 1. Align images 2. Merge overlapping regions Anandan
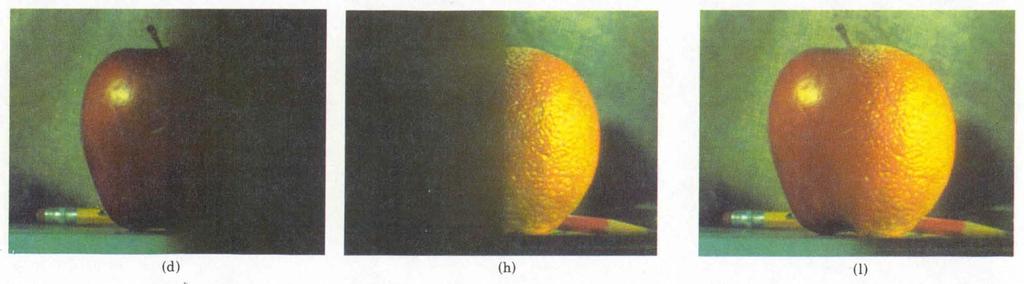
34 Blending Blend over too small a region: seams Blend over too large a region: ghosting
35 Multiresolution Blending Different blending regions for different levels in a pyramid [Burt & Adelson] Blend low frequencies over large regions (minimize seams due to brightness variations) Blend high frequencies over small regions (minimize ghosting)
36 Pyramid Creation Gaussian Pyramid Laplacian Pyramid Created from Gaussian pyramid by subtraction L i = G i expand(g i+1 ) Szeliski
37 Octaves in the Spatial Domain Lowpass Images Bandpass Images Szeliski

38 Pyramid Blending Szeliski

39 Minimum-Cost Cuts Instead of blending high frequencies along a straight line, blend along line of minimum differences in image intensities
40 Minimum-Cost Cuts Moving object, simple blending blur [Davis 98]

41 Minimum-Cost Cuts Minimum-cost cut no blur [Davis 98]



42 Poisson Image Blending Follow gradients of source subject to boundary conditions imposed by dest

43 Poisson Image Blending

44 Poisson Image Blending
Image Alignment and Mosaicing Feature Tracking and the Kalman Filter
 Image Alignment and Mosaicing Feature Tracking and the Kalman Filter Image Alignment Applications Local alignment: Tracking Stereo Global alignment: Camera jitter elimination Image enhancement Panoramic
Image Alignment and Mosaicing Feature Tracking and the Kalman Filter Image Alignment Applications Local alignment: Tracking Stereo Global alignment: Camera jitter elimination Image enhancement Panoramic
Image Stitching II. Linda Shapiro EE/CSE 576
 Image Stitching II Linda Shapiro EE/CSE 576 RANSAC for Homography Initial Matched Points RANSAC for Homography Final Matched Points RANSAC for Homography Image Blending What s wrong? Feathering + 1 0 ramp
Image Stitching II Linda Shapiro EE/CSE 576 RANSAC for Homography Initial Matched Points RANSAC for Homography Final Matched Points RANSAC for Homography Image Blending What s wrong? Feathering + 1 0 ramp
Image Stitching II. Linda Shapiro CSE 455
 Image Stitching II Linda Shapiro CSE 455 RANSAC for Homography Initial Matched Points RANSAC for Homography Final Matched Points RANSAC for Homography Image Blending What s wrong? Feathering + 1 0 1 0
Image Stitching II Linda Shapiro CSE 455 RANSAC for Homography Initial Matched Points RANSAC for Homography Final Matched Points RANSAC for Homography Image Blending What s wrong? Feathering + 1 0 1 0
Image Filtering. Slides, adapted from. Steve Seitz and Rick Szeliski, U.Washington
 Image Filtering Slides, adapted from Steve Seitz and Rick Szeliski, U.Washington The power of blur All is Vanity by Charles Allen Gillbert (1873-1929) Harmon LD & JuleszB (1973) The recognition of faces.
Image Filtering Slides, adapted from Steve Seitz and Rick Szeliski, U.Washington The power of blur All is Vanity by Charles Allen Gillbert (1873-1929) Harmon LD & JuleszB (1973) The recognition of faces.
INTEREST POINTS AT DIFFERENT SCALES
 INTEREST POINTS AT DIFFERENT SCALES Thank you for the slides. They come mostly from the following sources. Dan Huttenlocher Cornell U David Lowe U. of British Columbia Martial Hebert CMU Intuitively, junctions
INTEREST POINTS AT DIFFERENT SCALES Thank you for the slides. They come mostly from the following sources. Dan Huttenlocher Cornell U David Lowe U. of British Columbia Martial Hebert CMU Intuitively, junctions
Iterative Image Registration: Lucas & Kanade Revisited. Kentaro Toyama Vision Technology Group Microsoft Research
 Iterative Image Registration: Lucas & Kanade Revisited Kentaro Toyama Vision Technology Group Microsoft Research Every writer creates his own precursors. His work modifies our conception of the past, as
Iterative Image Registration: Lucas & Kanade Revisited Kentaro Toyama Vision Technology Group Microsoft Research Every writer creates his own precursors. His work modifies our conception of the past, as
Multiresolution image processing
 Multiresolution image processing Laplacian pyramids Some applications of Laplacian pyramids Discrete Wavelet Transform (DWT) Wavelet theory Wavelet image compression Bernd Girod: EE368 Digital Image Processing
Multiresolution image processing Laplacian pyramids Some applications of Laplacian pyramids Discrete Wavelet Transform (DWT) Wavelet theory Wavelet image compression Bernd Girod: EE368 Digital Image Processing
Multiscale Image Transforms
 Multiscale Image Transforms Goal: Develop filter-based representations to decompose images into component parts, to extract features/structures of interest, and to attenuate noise. Motivation: extract
Multiscale Image Transforms Goal: Develop filter-based representations to decompose images into component parts, to extract features/structures of interest, and to attenuate noise. Motivation: extract
Templates, Image Pyramids, and Filter Banks
 Templates, Image Pyramids, and Filter Banks 09/9/ Computer Vision James Hays, Brown Slides: Hoiem and others Review. Match the spatial domain image to the Fourier magnitude image 2 3 4 5 B A C D E Slide:
Templates, Image Pyramids, and Filter Banks 09/9/ Computer Vision James Hays, Brown Slides: Hoiem and others Review. Match the spatial domain image to the Fourier magnitude image 2 3 4 5 B A C D E Slide:
Motion Estimation (I)
") Motion Estimation (I) Ce Liu celiu@microsoft.com Microsoft Research New England We live in a moving world Perceiving, understanding and predicting motion is an important part of our daily lives Motion
Motion Estimation (I) Ce Liu celiu@microsoft.com Microsoft Research New England We live in a moving world Perceiving, understanding and predicting motion is an important part of our daily lives Motion
The Frequency Domain, without tears. Many slides borrowed from Steve Seitz
 The Frequency Domain, without tears Many slides borrowed from Steve Seitz Somewhere in Cinque Terre, May 2005 CS194: Image Manipulation & Computational Photography Alexei Efros, UC Berkeley, Fall 2016
The Frequency Domain, without tears Many slides borrowed from Steve Seitz Somewhere in Cinque Terre, May 2005 CS194: Image Manipulation & Computational Photography Alexei Efros, UC Berkeley, Fall 2016
ECE Digital Image Processing and Introduction to Computer Vision
 ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 2017 Outline Recap, image degradation / restoration Template
ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 2017 Outline Recap, image degradation / restoration Template
Motion Estimation (I) Ce Liu Microsoft Research New England
 Ce Liu Microsoft Research New England") Motion Estimation (I) Ce Liu celiu@microsoft.com Microsoft Research New England We live in a moving world Perceiving, understanding and predicting motion is an important part of our daily lives Motion
Motion Estimation (I) Ce Liu celiu@microsoft.com Microsoft Research New England We live in a moving world Perceiving, understanding and predicting motion is an important part of our daily lives Motion
Motion estimation. Digital Visual Effects Yung-Yu Chuang. with slides by Michael Black and P. Anandan
 Motion estimation Digital Visual Effects Yung-Yu Chuang with slides b Michael Black and P. Anandan Motion estimation Parametric motion image alignment Tracking Optical flow Parametric motion direct method
Motion estimation Digital Visual Effects Yung-Yu Chuang with slides b Michael Black and P. Anandan Motion estimation Parametric motion image alignment Tracking Optical flow Parametric motion direct method
Edges and Scale. Image Features. Detecting edges. Origin of Edges. Solution: smooth first. Effects of noise
 Edges and Scale Image Features From Sandlot Science Slides revised from S. Seitz, R. Szeliski, S. Lazebnik, etc. Origin of Edges surface normal discontinuity depth discontinuity surface color discontinuity
Edges and Scale Image Features From Sandlot Science Slides revised from S. Seitz, R. Szeliski, S. Lazebnik, etc. Origin of Edges surface normal discontinuity depth discontinuity surface color discontinuity
Lecture 4.3 Estimating homographies from feature correspondences. Thomas Opsahl
 Lecture 4.3 Estimating homographies from feature correspondences Thomas Opsahl Homographies induced by central projection 1 H 2 1 H 2 u uu 2 3 1 Homography Hu = u H = h 1 h 2 h 3 h 4 h 5 h 6 h 7 h 8 h
Lecture 4.3 Estimating homographies from feature correspondences Thomas Opsahl Homographies induced by central projection 1 H 2 1 H 2 u uu 2 3 1 Homography Hu = u H = h 1 h 2 h 3 h 4 h 5 h 6 h 7 h 8 h
Optical Flow, Motion Segmentation, Feature Tracking
 BIL 719 - Computer Vision May 21, 2014 Optical Flow, Motion Segmentation, Feature Tracking Aykut Erdem Dept. of Computer Engineering Hacettepe University Motion Optical Flow Motion Segmentation Feature
BIL 719 - Computer Vision May 21, 2014 Optical Flow, Motion Segmentation, Feature Tracking Aykut Erdem Dept. of Computer Engineering Hacettepe University Motion Optical Flow Motion Segmentation Feature
6.869 Advances in Computer Vision. Prof. Bill Freeman March 1, 2005
 6.869 Advances in Computer Vision Prof. Bill Freeman March 1 2005 1 2 Local Features Matching points across images important for: object identification instance recognition object class recognition pose
6.869 Advances in Computer Vision Prof. Bill Freeman March 1 2005 1 2 Local Features Matching points across images important for: object identification instance recognition object class recognition pose
Elaborazione delle Immagini Informazione multimediale - Immagini. Raffaella Lanzarotti
 Elaborazione delle Immagini Informazione multimediale - Immagini Raffaella Lanzarotti OPTICAL FLOW Thanks to prof. Mubarak Shah,UCF 2 Video Video: sequence of frames (images) catch in the time Data: function
Elaborazione delle Immagini Informazione multimediale - Immagini Raffaella Lanzarotti OPTICAL FLOW Thanks to prof. Mubarak Shah,UCF 2 Video Video: sequence of frames (images) catch in the time Data: function
6.869 Advances in Computer Vision. Bill Freeman, Antonio Torralba and Phillip Isola MIT Oct. 3, 2018
 6.869 Advances in Computer Vision Bill Freeman, Antonio Torralba and Phillip Isola MIT Oct. 3, 2018 1 Sampling Sampling Pixels Continuous world 3 Sampling 4 Sampling 5 Continuous image f (x, y) Sampling
6.869 Advances in Computer Vision Bill Freeman, Antonio Torralba and Phillip Isola MIT Oct. 3, 2018 1 Sampling Sampling Pixels Continuous world 3 Sampling 4 Sampling 5 Continuous image f (x, y) Sampling
Introduction to motion correspondence
 Introduction to motion correspondence 1 IPAM - UCLA July 24, 2013 Iasonas Kokkinos Center for Visual Computing Ecole Centrale Paris / INRIA Saclay Why estimate visual motion? 2 Tracking Segmentation Structure
Introduction to motion correspondence 1 IPAM - UCLA July 24, 2013 Iasonas Kokkinos Center for Visual Computing Ecole Centrale Paris / INRIA Saclay Why estimate visual motion? 2 Tracking Segmentation Structure
Optical flow. Subhransu Maji. CMPSCI 670: Computer Vision. October 20, 2016
 Optical flow Subhransu Maji CMPSC 670: Computer Vision October 20, 2016 Visual motion Man slides adapted from S. Seitz, R. Szeliski, M. Pollefes CMPSC 670 2 Motion and perceptual organization Sometimes,
Optical flow Subhransu Maji CMPSC 670: Computer Vision October 20, 2016 Visual motion Man slides adapted from S. Seitz, R. Szeliski, M. Pollefes CMPSC 670 2 Motion and perceptual organization Sometimes,
Wavelet Decomposition in Laplacian Pyramid for Image Fusion
 International Journal of Signal Processing Systems Vol. 4, No., February 06 Wavelet Decomposition in Laplacian Pyramid for Image Fusion I. S. Wahyuni Laboratory Lei, University of Burgundy, Dijon, France
International Journal of Signal Processing Systems Vol. 4, No., February 06 Wavelet Decomposition in Laplacian Pyramid for Image Fusion I. S. Wahyuni Laboratory Lei, University of Burgundy, Dijon, France
Image Filtering, Edges and Image Representation
 Image Filtering, Edges and Image Representation Capturing what s important Req reading: Chapter 7, 9 F&P Adelson, Simoncelli and Freeman (handout online) Opt reading: Horn 7 & 8 FP 8 February 19, 8 A nice
Image Filtering, Edges and Image Representation Capturing what s important Req reading: Chapter 7, 9 F&P Adelson, Simoncelli and Freeman (handout online) Opt reading: Horn 7 & 8 FP 8 February 19, 8 A nice
Detection of Artificial Satellites in Images Acquired in Track Rate Mode.
 Detection of Artificial Satellites in Images Acquired in Track Rate Mode. Martin P. Lévesque Defence R&D Canada- Valcartier, 2459 Boul. Pie-XI North, Québec, QC, G3J 1X5 Canada, martin.levesque@drdc-rddc.gc.ca
Detection of Artificial Satellites in Images Acquired in Track Rate Mode. Martin P. Lévesque Defence R&D Canada- Valcartier, 2459 Boul. Pie-XI North, Québec, QC, G3J 1X5 Canada, martin.levesque@drdc-rddc.gc.ca
Lecture 8: Interest Point Detection. Saad J Bedros
 #1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Review of Edge Detectors #2 Today s Lecture Interest Points Detection What do we mean with Interest Point Detection in an Image Goal:
#1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Review of Edge Detectors #2 Today s Lecture Interest Points Detection What do we mean with Interest Point Detection in an Image Goal:
Optical Flow, KLT Feature Tracker.
 Optical Flow, KL Feature racker E-mail: hogijung@hanang.ac.kr Motion in Computer Vision Motion Structure rom motion Detection/segmentation with direction [1] E-mail: hogijung@hanang.ac.kr Motion Field.s..
Optical Flow, KL Feature racker E-mail: hogijung@hanang.ac.kr Motion in Computer Vision Motion Structure rom motion Detection/segmentation with direction [1] E-mail: hogijung@hanang.ac.kr Motion Field.s..
Lecture 12. Local Feature Detection. Matching with Invariant Features. Why extract features? Why extract features? Why extract features?
 Lecture 1 Why extract eatures? Motivation: panorama stitching We have two images how do we combine them? Local Feature Detection Guest lecturer: Alex Berg Reading: Harris and Stephens David Lowe IJCV We
Lecture 1 Why extract eatures? Motivation: panorama stitching We have two images how do we combine them? Local Feature Detection Guest lecturer: Alex Berg Reading: Harris and Stephens David Lowe IJCV We
Lecture 7: Finding Features (part 2/2)
") Lecture 7: Finding Features (part 2/2) Professor Fei- Fei Li Stanford Vision Lab Lecture 7 -! 1 What we will learn today? Local invariant features MoHvaHon Requirements, invariances Keypoint localizahon
Lecture 7: Finding Features (part 2/2) Professor Fei- Fei Li Stanford Vision Lab Lecture 7 -! 1 What we will learn today? Local invariant features MoHvaHon Requirements, invariances Keypoint localizahon
Lecture 7: Finding Features (part 2/2)
") Lecture 7: Finding Features (part 2/2) Dr. Juan Carlos Niebles Stanford AI Lab Professor Fei- Fei Li Stanford Vision Lab 1 What we will learn today? Local invariant features MoPvaPon Requirements, invariances
Lecture 7: Finding Features (part 2/2) Dr. Juan Carlos Niebles Stanford AI Lab Professor Fei- Fei Li Stanford Vision Lab 1 What we will learn today? Local invariant features MoPvaPon Requirements, invariances
COMP344 Digital Image Processing Fall 2007 Final Examination
 COMP344 Digital Image Processing Fall 2007 Final Examination Time allowed: 2 hours Name Student ID Email Question 1 Question 2 Question 3 Question 4 Question 5 Question 6 Total With model answer HK University
COMP344 Digital Image Processing Fall 2007 Final Examination Time allowed: 2 hours Name Student ID Email Question 1 Question 2 Question 3 Question 4 Question 5 Question 6 Total With model answer HK University
SIFT: SCALE INVARIANT FEATURE TRANSFORM BY DAVID LOWE
 SIFT: SCALE INVARIANT FEATURE TRANSFORM BY DAVID LOWE Overview Motivation of Work Overview of Algorithm Scale Space and Difference of Gaussian Keypoint Localization Orientation Assignment Descriptor Building
SIFT: SCALE INVARIANT FEATURE TRANSFORM BY DAVID LOWE Overview Motivation of Work Overview of Algorithm Scale Space and Difference of Gaussian Keypoint Localization Orientation Assignment Descriptor Building
Scale-space image processing
 Scale-space image processing Corresponding image features can appear at different scales Like shift-invariance, scale-invariance of image processing algorithms is often desirable. Scale-space representation
Scale-space image processing Corresponding image features can appear at different scales Like shift-invariance, scale-invariance of image processing algorithms is often desirable. Scale-space representation
Invariant local features. Invariant Local Features. Classes of transformations. (Good) invariant local features. Case study: panorama stitching
 invariant local features. Case study: panorama stitching") Invariant local eatures Invariant Local Features Tuesday, February 6 Subset o local eature types designed to be invariant to Scale Translation Rotation Aine transormations Illumination 1) Detect distinctive
Invariant local eatures Invariant Local Features Tuesday, February 6 Subset o local eature types designed to be invariant to Scale Translation Rotation Aine transormations Illumination 1) Detect distinctive
Laplacian Filters. Sobel Filters. Laplacian Filters. Laplacian Filters. Laplacian Filters. Laplacian Filters
 Sobel Filters Note that smoothing the image before applying a Sobel filter typically gives better results. Even thresholding the Sobel filtered image cannot usually create precise, i.e., -pixel wide, edges.
Sobel Filters Note that smoothing the image before applying a Sobel filter typically gives better results. Even thresholding the Sobel filtered image cannot usually create precise, i.e., -pixel wide, edges.
Feature extraction: Corners and blobs
 Feature extraction: Corners and blobs Review: Linear filtering and edge detection Name two different kinds of image noise Name a non-linear smoothing filter What advantages does median filtering have over
Feature extraction: Corners and blobs Review: Linear filtering and edge detection Name two different kinds of image noise Name a non-linear smoothing filter What advantages does median filtering have over
Edge Detection. Computer Vision P. Schrater Spring 2003
 Edge Detection Computer Vision P. Schrater Spring 2003 Simplest Model: (Canny) Edge(x) = a U(x) + n(x) U(x)? x=0 Convolve image with U and find points with high magnitude. Choose value by comparing with
Edge Detection Computer Vision P. Schrater Spring 2003 Simplest Model: (Canny) Edge(x) = a U(x) + n(x) U(x)? x=0 Convolve image with U and find points with high magnitude. Choose value by comparing with
TRACKING and DETECTION in COMPUTER VISION Filtering and edge detection
 Technischen Universität München Winter Semester 0/0 TRACKING and DETECTION in COMPUTER VISION Filtering and edge detection Slobodan Ilić Overview Image formation Convolution Non-liner filtering: Median
Technischen Universität München Winter Semester 0/0 TRACKING and DETECTION in COMPUTER VISION Filtering and edge detection Slobodan Ilić Overview Image formation Convolution Non-liner filtering: Median
Video and Motion Analysis Computer Vision Carnegie Mellon University (Kris Kitani)
") Video and Motion Analysis 16-385 Computer Vision Carnegie Mellon University (Kris Kitani) Optical flow used for feature tracking on a drone Interpolated optical flow used for super slow-mo optical flow
Video and Motion Analysis 16-385 Computer Vision Carnegie Mellon University (Kris Kitani) Optical flow used for feature tracking on a drone Interpolated optical flow used for super slow-mo optical flow
CS 3710: Visual Recognition Describing Images with Features. Adriana Kovashka Department of Computer Science January 8, 2015
 CS 3710: Visual Recognition Describing Images with Features Adriana Kovashka Department of Computer Science January 8, 2015 Plan for Today Presentation assignments + schedule changes Image filtering Feature
CS 3710: Visual Recognition Describing Images with Features Adriana Kovashka Department of Computer Science January 8, 2015 Plan for Today Presentation assignments + schedule changes Image filtering Feature
Global parametric image alignment via high-order approximation
 Global parametric image alignment via high-order approximation Y. Keller, A. Averbuch 2 Electrical & Computer Engineering Department, Ben-Gurion University of the Negev. 2 School of Computer Science, Tel
Global parametric image alignment via high-order approximation Y. Keller, A. Averbuch 2 Electrical & Computer Engineering Department, Ben-Gurion University of the Negev. 2 School of Computer Science, Tel
Computer Vision I. Announcements
 Announcements Motion II No class Wednesda (Happ Thanksgiving) HW4 will be due Frida 1/8 Comment on Non-maximal supression CSE5A Lecture 15 Shi-Tomasi Corner Detector Filter image with a Gaussian. Compute
Announcements Motion II No class Wednesda (Happ Thanksgiving) HW4 will be due Frida 1/8 Comment on Non-maximal supression CSE5A Lecture 15 Shi-Tomasi Corner Detector Filter image with a Gaussian. Compute
Machine vision. Summary # 4. The mask for Laplacian is given
 1 Machine vision Summary # 4 The mask for Laplacian is given L = 0 1 0 1 4 1 (6) 0 1 0 Another Laplacian mask that gives more importance to the center element is L = 1 1 1 1 8 1 (7) 1 1 1 Note that the
1 Machine vision Summary # 4 The mask for Laplacian is given L = 0 1 0 1 4 1 (6) 0 1 0 Another Laplacian mask that gives more importance to the center element is L = 1 1 1 1 8 1 (7) 1 1 1 Note that the
Edge Detection PSY 5018H: Math Models Hum Behavior, Prof. Paul Schrater, Spring 2005
 Edge Detection PSY 5018H: Math Models Hum Behavior, Prof. Paul Schrater, Spring 2005 Gradients and edges Points of sharp change in an image are interesting: change in reflectance change in object change
Edge Detection PSY 5018H: Math Models Hum Behavior, Prof. Paul Schrater, Spring 2005 Gradients and edges Points of sharp change in an image are interesting: change in reflectance change in object change
Missing Data Interpolation with Gaussian Pyramids
 Stanford Exploration Project, Report 124, April 4, 2006, pages 33?? Missing Data Interpolation with Gaussian Pyramids Satyakee Sen ABSTRACT I describe a technique for interpolation of missing data in which
Stanford Exploration Project, Report 124, April 4, 2006, pages 33?? Missing Data Interpolation with Gaussian Pyramids Satyakee Sen ABSTRACT I describe a technique for interpolation of missing data in which
Multiresolution schemes
 Multiresolution schemes Fondamenti di elaborazione del segnale multi-dimensionale Multi-dimensional signal processing Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Elaborazione
Multiresolution schemes Fondamenti di elaborazione del segnale multi-dimensionale Multi-dimensional signal processing Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Elaborazione
Digital Image Processing
 Digital Image Processing, 2nd ed. Digital Image Processing Chapter 7 Wavelets and Multiresolution Processing Dr. Kai Shuang Department of Electronic Engineering China University of Petroleum shuangkai@cup.edu.cn
Digital Image Processing, 2nd ed. Digital Image Processing Chapter 7 Wavelets and Multiresolution Processing Dr. Kai Shuang Department of Electronic Engineering China University of Petroleum shuangkai@cup.edu.cn
Multimedia Databases. Wolf-Tilo Balke Philipp Wille Institut für Informationssysteme Technische Universität Braunschweig
 Multimedia Databases Wolf-Tilo Balke Philipp Wille Institut für Informationssysteme Technische Universität Braunschweig http://www.ifis.cs.tu-bs.de 4 Previous Lecture Texture-Based Image Retrieval Low
Multimedia Databases Wolf-Tilo Balke Philipp Wille Institut für Informationssysteme Technische Universität Braunschweig http://www.ifis.cs.tu-bs.de 4 Previous Lecture Texture-Based Image Retrieval Low
Multiresolution schemes
 Multiresolution schemes Fondamenti di elaborazione del segnale multi-dimensionale Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Elaborazione dei Segnali Multi-dimensionali e
Multiresolution schemes Fondamenti di elaborazione del segnale multi-dimensionale Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Elaborazione dei Segnali Multi-dimensionali e
Multimedia Databases. Previous Lecture. 4.1 Multiresolution Analysis. 4 Shape-based Features. 4.1 Multiresolution Analysis
 Previous Lecture Multimedia Databases Texture-Based Image Retrieval Low Level Features Tamura Measure, Random Field Model High-Level Features Fourier-Transform, Wavelets Wolf-Tilo Balke Silviu Homoceanu
Previous Lecture Multimedia Databases Texture-Based Image Retrieval Low Level Features Tamura Measure, Random Field Model High-Level Features Fourier-Transform, Wavelets Wolf-Tilo Balke Silviu Homoceanu
Filtering and Edge Detection
 Filtering and Edge Detection Local Neighborhoods Hard to tell anything from a single pixel Example: you see a reddish pixel. Is this the object s color? Illumination? Noise? The next step in order of complexity
Filtering and Edge Detection Local Neighborhoods Hard to tell anything from a single pixel Example: you see a reddish pixel. Is this the object s color? Illumination? Noise? The next step in order of complexity
Interest Operators. All lectures are from posted research papers. Harris Corner Detector: the first and most basic interest operator
 Interest Operators All lectures are from posted research papers. Harris Corner Detector: the first and most basic interest operator SIFT interest point detector and region descriptor Kadir Entrop Detector
Interest Operators All lectures are from posted research papers. Harris Corner Detector: the first and most basic interest operator SIFT interest point detector and region descriptor Kadir Entrop Detector
Machine vision, spring 2018 Summary 4
 Machine vision Summary # 4 The mask for Laplacian is given L = 4 (6) Another Laplacian mask that gives more importance to the center element is given by L = 8 (7) Note that the sum of the elements in the
Machine vision Summary # 4 The mask for Laplacian is given L = 4 (6) Another Laplacian mask that gives more importance to the center element is given by L = 8 (7) Note that the sum of the elements in the
Wavelets and Multiresolution Processing
 Wavelets and Multiresolution Processing Wavelets Fourier transform has it basis functions in sinusoids Wavelets based on small waves of varying frequency and limited duration In addition to frequency,
Wavelets and Multiresolution Processing Wavelets Fourier transform has it basis functions in sinusoids Wavelets based on small waves of varying frequency and limited duration In addition to frequency,
Reprinted from Proceedings of the Pattern Recognition and Information Processing Conference (pp ), Dallas, TX (1981).
, Dallas, TX (1981).") Reprinted from Proceedings of the Pattern Recognition and Information Processing Conference (pp. 18-3), Dallas, TX (1981). IMAGE DATA COMPRESSION WITH THE LAPLACIAN PYRAMID* Edward H. Adelson Psychology
Reprinted from Proceedings of the Pattern Recognition and Information Processing Conference (pp. 18-3), Dallas, TX (1981). IMAGE DATA COMPRESSION WITH THE LAPLACIAN PYRAMID* Edward H. Adelson Psychology
Multimedia Databases. 4 Shape-based Features. 4.1 Multiresolution Analysis. 4.1 Multiresolution Analysis. 4.1 Multiresolution Analysis
 4 Shape-based Features Multimedia Databases Wolf-Tilo Balke Silviu Homoceanu Institut für Informationssysteme Technische Universität Braunschweig http://www.ifis.cs.tu-bs.de 4 Multiresolution Analysis
4 Shape-based Features Multimedia Databases Wolf-Tilo Balke Silviu Homoceanu Institut für Informationssysteme Technische Universität Braunschweig http://www.ifis.cs.tu-bs.de 4 Multiresolution Analysis
Lecture 13: Tracking mo3on features op3cal flow
 Lecture 13: Tracking mo3on features op3cal flow Professor Fei- Fei Li Stanford Vision Lab Lecture 14-1! What we will learn today? Introduc3on Op3cal flow Feature tracking Applica3ons Reading: [Szeliski]
Lecture 13: Tracking mo3on features op3cal flow Professor Fei- Fei Li Stanford Vision Lab Lecture 14-1! What we will learn today? Introduc3on Op3cal flow Feature tracking Applica3ons Reading: [Szeliski]
SURF Features. Jacky Baltes Dept. of Computer Science University of Manitoba WWW:
 SURF Features Jacky Baltes Dept. of Computer Science University of Manitoba Email: jacky@cs.umanitoba.ca WWW: http://www.cs.umanitoba.ca/~jacky Salient Spatial Features Trying to find interest points Points
SURF Features Jacky Baltes Dept. of Computer Science University of Manitoba Email: jacky@cs.umanitoba.ca WWW: http://www.cs.umanitoba.ca/~jacky Salient Spatial Features Trying to find interest points Points
Corners, Blobs & Descriptors. With slides from S. Lazebnik & S. Seitz, D. Lowe, A. Efros
 Corners, Blobs & Descriptors With slides from S. Lazebnik & S. Seitz, D. Lowe, A. Efros Motivation: Build a Panorama M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 How do we build panorama?
Corners, Blobs & Descriptors With slides from S. Lazebnik & S. Seitz, D. Lowe, A. Efros Motivation: Build a Panorama M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 How do we build panorama?
Gradient-domain image processing
 Gradient-domain image processing http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 10 Course announcements Homework 3 is out. - (Much) smaller
Gradient-domain image processing http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 10 Course announcements Homework 3 is out. - (Much) smaller
Linear Diffusion and Image Processing. Outline
 Outline Linear Diffusion and Image Processing Fourier Transform Convolution Image Restoration: Linear Filtering Diffusion Processes for Noise Filtering linear scale space theory Gauss-Laplace pyramid for
Outline Linear Diffusion and Image Processing Fourier Transform Convolution Image Restoration: Linear Filtering Diffusion Processes for Noise Filtering linear scale space theory Gauss-Laplace pyramid for
Multiresolution Analysis
 Multiresolution Analysis DS-GA 1013 / MATH-GA 2824 Optimization-based Data Analysis http://www.cims.nyu.edu/~cfgranda/pages/obda_fall17/index.html Carlos Fernandez-Granda Frames Short-time Fourier transform
Multiresolution Analysis DS-GA 1013 / MATH-GA 2824 Optimization-based Data Analysis http://www.cims.nyu.edu/~cfgranda/pages/obda_fall17/index.html Carlos Fernandez-Granda Frames Short-time Fourier transform
Uncertainty Models in Quasiconvex Optimization for Geometric Reconstruction
 Uncertainty Models in Quasiconvex Optimization for Geometric Reconstruction Qifa Ke and Takeo Kanade Department of Computer Science, Carnegie Mellon University Email: ke@cmu.edu, tk@cs.cmu.edu Abstract
Uncertainty Models in Quasiconvex Optimization for Geometric Reconstruction Qifa Ke and Takeo Kanade Department of Computer Science, Carnegie Mellon University Email: ke@cmu.edu, tk@cs.cmu.edu Abstract
Edge Detection. Introduction to Computer Vision. Useful Mathematics Funcs. The bad news
 Edge Detection Introduction to Computer Vision CS / ECE 8B Thursday, April, 004 Edge detection (HO #5) Edge detection is a local area operator that seeks to find significant, meaningful changes in image
Edge Detection Introduction to Computer Vision CS / ECE 8B Thursday, April, 004 Edge detection (HO #5) Edge detection is a local area operator that seeks to find significant, meaningful changes in image
The recovery of motion information from visual input is an important task for both natural
 MIT Media Laboratory Vision and Modeling Technical Report 65. Computing Optical Flow Distributions Using Spatio-temporal Filters Eero P. Simoncelli y and Edward H. Adelson z Vision and Modeling Group,
MIT Media Laboratory Vision and Modeling Technical Report 65. Computing Optical Flow Distributions Using Spatio-temporal Filters Eero P. Simoncelli y and Edward H. Adelson z Vision and Modeling Group,
TinySR. Peter Schmidt-Nielsen. August 27, 2014
 TinySR Peter Schmidt-Nielsen August 27, 2014 Abstract TinySR is a light weight real-time small vocabulary speech recognizer written entirely in portable C. The library fits in a single file (plus header),
TinySR Peter Schmidt-Nielsen August 27, 2014 Abstract TinySR is a light weight real-time small vocabulary speech recognizer written entirely in portable C. The library fits in a single file (plus header),
Roadmap. Introduction to image analysis (computer vision) Theory of edge detection. Applications
 Theory of edge detection. Applications") Edge Detection Roadmap Introduction to image analysis (computer vision) Its connection with psychology and neuroscience Why is image analysis difficult? Theory of edge detection Gradient operator Advanced
Edge Detection Roadmap Introduction to image analysis (computer vision) Its connection with psychology and neuroscience Why is image analysis difficult? Theory of edge detection Gradient operator Advanced
Lecture Notes 5: Multiresolution Analysis
 Optimization-based data analysis Fall 2017 Lecture Notes 5: Multiresolution Analysis 1 Frames A frame is a generalization of an orthonormal basis. The inner products between the vectors in a frame and
Optimization-based data analysis Fall 2017 Lecture Notes 5: Multiresolution Analysis 1 Frames A frame is a generalization of an orthonormal basis. The inner products between the vectors in a frame and
The Frequency Domain : Computational Photography Alexei Efros, CMU, Fall Many slides borrowed from Steve Seitz
 The Frequency Domain 15-463: Computational Photography Alexei Efros, CMU, Fall 2008 Somewhere in Cinque Terre, May 2005 Many slides borrowed from Steve Seitz Salvador Dali Gala Contemplating the Mediterranean
The Frequency Domain 15-463: Computational Photography Alexei Efros, CMU, Fall 2008 Somewhere in Cinque Terre, May 2005 Many slides borrowed from Steve Seitz Salvador Dali Gala Contemplating the Mediterranean
CS 4495 Computer Vision. Frequency and Fourier Transforms. Aaron Bobick School of Interactive Computing. Frequency and Fourier Transform
 CS 4495 Computer Vision Frequency and Fourier Transforms Aaron Bobick School of Interactive Computing Administrivia Project 1 is (still) on line get started now! Readings for this week: FP Chapter 4 (which
CS 4495 Computer Vision Frequency and Fourier Transforms Aaron Bobick School of Interactive Computing Administrivia Project 1 is (still) on line get started now! Readings for this week: FP Chapter 4 (which
Edge Detection. CS 650: Computer Vision
 CS 650: Computer Vision Edges and Gradients Edge: local indication of an object transition Edge detection: local operators that find edges (usually involves convolution) Local intensity transitions are
CS 650: Computer Vision Edges and Gradients Edge: local indication of an object transition Edge detection: local operators that find edges (usually involves convolution) Local intensity transitions are
Image matching. by Diva Sian. by swashford
 Image matching by Diva Sian by swashford Harder case by Diva Sian by scgbt Invariant local features Find features that are invariant to transformations geometric invariance: translation, rotation, scale
Image matching by Diva Sian by swashford Harder case by Diva Sian by scgbt Invariant local features Find features that are invariant to transformations geometric invariance: translation, rotation, scale
Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems
 Robots for People --- A project for intelligent integrated systems") 1 Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems V. Estivill-Castro 2 Perception Concepts Vision Chapter 4 (textbook) Sections 4.3 to 4.5 What is the course
1 Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems V. Estivill-Castro 2 Perception Concepts Vision Chapter 4 (textbook) Sections 4.3 to 4.5 What is the course
Vision par ordinateur
 Vision par ordinateur Géométrie épipolaire Frédéric Devernay Avec des transparents de Marc Pollefeys Epipolar geometry π Underlying structure in set of matches for rigid scenes C1 m1 l1 M L2 L1 l T 1 l
Vision par ordinateur Géométrie épipolaire Frédéric Devernay Avec des transparents de Marc Pollefeys Epipolar geometry π Underlying structure in set of matches for rigid scenes C1 m1 l1 M L2 L1 l T 1 l
CSE 473/573 Computer Vision and Image Processing (CVIP)
") CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Lecture 11 Local Features 1 Schedule Last class We started local features Today More on local features Readings for
CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Lecture 11 Local Features 1 Schedule Last class We started local features Today More on local features Readings for
Modeling Multiscale Differential Pixel Statistics
 Modeling Multiscale Differential Pixel Statistics David Odom a and Peyman Milanfar a a Electrical Engineering Department, University of California, Santa Cruz CA. 95064 USA ABSTRACT The statistics of natural
Modeling Multiscale Differential Pixel Statistics David Odom a and Peyman Milanfar a a Electrical Engineering Department, University of California, Santa Cruz CA. 95064 USA ABSTRACT The statistics of natural
Topic 7. Convolution, Filters, Correlation, Representation. Bryan Pardo, 2008, Northwestern University EECS 352: Machine Perception of Music and Audio
 Topic 7 Convolution, Filters, Correlation, Representation Short time Fourier Transform Break signal into windows Calculate DFT of each window The Spectrogram spectrogram(y,1024,512,1024,fs,'yaxis'); A
Topic 7 Convolution, Filters, Correlation, Representation Short time Fourier Transform Break signal into windows Calculate DFT of each window The Spectrogram spectrogram(y,1024,512,1024,fs,'yaxis'); A
Advanced Features. Advanced Features: Topics. Jana Kosecka. Slides from: S. Thurn, D. Lowe, Forsyth and Ponce. Advanced features and feature matching
 Advanced Features Jana Kosecka Slides from: S. Thurn, D. Lowe, Forsyth and Ponce Advanced Features: Topics Advanced features and feature matching Template matching SIFT features Haar features 2 1 Features
Advanced Features Jana Kosecka Slides from: S. Thurn, D. Lowe, Forsyth and Ponce Advanced Features: Topics Advanced features and feature matching Template matching SIFT features Haar features 2 1 Features
Announcements. Tracking. Comptuer Vision I. The Motion Field. = ω. Pure Translation. Motion Field Equation. Rigid Motion: General Case
 Announcements Tracking Computer Vision I CSE5A Lecture 17 HW 3 due toda HW 4 will be on web site tomorrow: Face recognition using 3 techniques Toda: Tracking Reading: Sections 17.1-17.3 The Motion Field
Announcements Tracking Computer Vision I CSE5A Lecture 17 HW 3 due toda HW 4 will be on web site tomorrow: Face recognition using 3 techniques Toda: Tracking Reading: Sections 17.1-17.3 The Motion Field
A new class of morphological pyramids for multiresolution image analysis
 new class of morphological pyramids for multiresolution image analysis Jos B.T.M. Roerdink Institute for Mathematics and Computing Science University of Groningen P.O. Box 800, 9700 V Groningen, The Netherlands
new class of morphological pyramids for multiresolution image analysis Jos B.T.M. Roerdink Institute for Mathematics and Computing Science University of Groningen P.O. Box 800, 9700 V Groningen, The Netherlands
The Frequency Domain. Many slides borrowed from Steve Seitz
 The Frequency Domain Many slides borrowed from Steve Seitz Somewhere in Cinque Terre, May 2005 15-463: Computational Photography Alexei Efros, CMU, Spring 2010 Salvador Dali Gala Contemplating the Mediterranean
The Frequency Domain Many slides borrowed from Steve Seitz Somewhere in Cinque Terre, May 2005 15-463: Computational Photography Alexei Efros, CMU, Spring 2010 Salvador Dali Gala Contemplating the Mediterranean
Lecture 6: Edge Detection. CAP 5415: Computer Vision Fall 2008
 Lecture 6: Edge Detection CAP 5415: Computer Vision Fall 2008 Announcements PS 2 is available Please read it by Thursday During Thursday lecture, I will be going over it in some detail Monday - Computer
Lecture 6: Edge Detection CAP 5415: Computer Vision Fall 2008 Announcements PS 2 is available Please read it by Thursday During Thursday lecture, I will be going over it in some detail Monday - Computer
Dense Optical Flow Estimation from the Monogenic Curvature Tensor
 Dense Optical Flow Estimation from the Monogenic Curvature Tensor Di Zang 1, Lennart Wietzke 1, Christian Schmaltz 2, and Gerald Sommer 1 1 Department of Computer Science, Christian-Albrechts-University
Dense Optical Flow Estimation from the Monogenic Curvature Tensor Di Zang 1, Lennart Wietzke 1, Christian Schmaltz 2, and Gerald Sommer 1 1 Department of Computer Science, Christian-Albrechts-University
SCALE-SPACE - Theory and Applications
 SCALE-SPACE - Theory and Applications Scale is embedded in the task: do you want only coins or TREASURE? SCALE-SPACE Theory and Applications - Scale-space theory is a framework of multiscale image/signal
SCALE-SPACE - Theory and Applications Scale is embedded in the task: do you want only coins or TREASURE? SCALE-SPACE Theory and Applications - Scale-space theory is a framework of multiscale image/signal
Frequency2: Sampling and Aliasing
 CS 4495 Computer Vision Frequency2: Sampling and Aliasing Aaron Bobick School of Interactive Computing Administrivia Project 1 is due tonight. Submit what you have at the deadline. Next problem set stereo
CS 4495 Computer Vision Frequency2: Sampling and Aliasing Aaron Bobick School of Interactive Computing Administrivia Project 1 is due tonight. Submit what you have at the deadline. Next problem set stereo
What is Motion? As Visual Input: Change in the spatial distribution of light on the sensors.
 What is Motion? As Visual Input: Change in the spatial distribution of light on the sensors. Minimally, di(x,y,t)/dt 0 As Perception: Inference about causes of intensity change, e.g. I(x,y,t) v OBJ (x,y,z,t)
What is Motion? As Visual Input: Change in the spatial distribution of light on the sensors. Minimally, di(x,y,t)/dt 0 As Perception: Inference about causes of intensity change, e.g. I(x,y,t) v OBJ (x,y,z,t)
Scientific Computing: An Introductory Survey
 Scientific Computing: An Introductory Survey Chapter 12 Prof. Michael T. Heath Department of Computer Science University of Illinois at Urbana-Champaign Copyright c 2002. Reproduction permitted for noncommercial,
Scientific Computing: An Introductory Survey Chapter 12 Prof. Michael T. Heath Department of Computer Science University of Illinois at Urbana-Champaign Copyright c 2002. Reproduction permitted for noncommercial,
CSCI 250: Intro to Robotics. Spring Term 2017 Prof. Levy. Computer Vision: A Brief Survey
 CSCI 25: Intro to Robotics Spring Term 27 Prof. Levy Computer Vision: A Brief Survey What Is Computer Vision? Higher-order tasks Face recognition Object recognition (Deep Learning) What Is Computer Vision?
CSCI 25: Intro to Robotics Spring Term 27 Prof. Levy Computer Vision: A Brief Survey What Is Computer Vision? Higher-order tasks Face recognition Object recognition (Deep Learning) What Is Computer Vision?
Advances in Computer Vision. Prof. Bill Freeman. Image and shape descriptors. Readings: Mikolajczyk and Schmid; Belongie et al.
 6.869 Advances in Computer Vision Prof. Bill Freeman March 3, 2005 Image and shape descriptors Affine invariant features Comparison of feature descriptors Shape context Readings: Mikolajczyk and Schmid;
6.869 Advances in Computer Vision Prof. Bill Freeman March 3, 2005 Image and shape descriptors Affine invariant features Comparison of feature descriptors Shape context Readings: Mikolajczyk and Schmid;
Nonrobust and Robust Objective Functions
 Nonrobust and Robust Objective Functions The objective function of the estimators in the input space is built from the sum of squared Mahalanobis distances (residuals) d 2 i = 1 σ 2(y i y io ) C + y i
Nonrobust and Robust Objective Functions The objective function of the estimators in the input space is built from the sum of squared Mahalanobis distances (residuals) d 2 i = 1 σ 2(y i y io ) C + y i
Subsampling and image pyramids
 Subsampling and image pyramids http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 3 Course announcements Homework 0 and homework 1 will be posted tonight. - Homework 0 is not required
Subsampling and image pyramids http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 3 Course announcements Homework 0 and homework 1 will be posted tonight. - Homework 0 is not required
Edge Detection in Computer Vision Systems
 1 CS332 Visual Processing in Computer and Biological Vision Systems Edge Detection in Computer Vision Systems This handout summarizes much of the material on the detection and description of intensity
1 CS332 Visual Processing in Computer and Biological Vision Systems Edge Detection in Computer Vision Systems This handout summarizes much of the material on the detection and description of intensity
Expectation Maximization Deconvolution Algorithm
 Epectation Maimization Deconvolution Algorithm Miaomiao ZHANG March 30, 2011 Abstract In this paper, we use a general mathematical and eperimental methodology to analyze image deconvolution. The main procedure
Epectation Maimization Deconvolution Algorithm Miaomiao ZHANG March 30, 2011 Abstract In this paper, we use a general mathematical and eperimental methodology to analyze image deconvolution. The main procedure
Introduction to Computer Vision. 2D Linear Systems
 Introduction to Computer Vision D Linear Systems Review: Linear Systems We define a system as a unit that converts an input function into an output function Independent variable System operator or Transfer
Introduction to Computer Vision D Linear Systems Review: Linear Systems We define a system as a unit that converts an input function into an output function Independent variable System operator or Transfer
Image Analysis. Feature extraction: corners and blobs
 Image Analysis Feature extraction: corners and blobs Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Svetlana Lazebnik, University of North Carolina at Chapel Hill (http://www.cs.unc.edu/~lazebnik/spring10/).
Image Analysis Feature extraction: corners and blobs Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Svetlana Lazebnik, University of North Carolina at Chapel Hill (http://www.cs.unc.edu/~lazebnik/spring10/).
DESIGN OF MULTI-DIMENSIONAL DERIVATIVE FILTERS. Eero P. Simoncelli
 Published in: First IEEE Int l Conf on Image Processing, Austin Texas, vol I, pages 790--793, November 1994. DESIGN OF MULTI-DIMENSIONAL DERIVATIVE FILTERS Eero P. Simoncelli GRASP Laboratory, Room 335C
Published in: First IEEE Int l Conf on Image Processing, Austin Texas, vol I, pages 790--793, November 1994. DESIGN OF MULTI-DIMENSIONAL DERIVATIVE FILTERS Eero P. Simoncelli GRASP Laboratory, Room 335C
Vision 3D articielle Session 2: Essential and fundamental matrices, their computation, RANSAC algorithm
 Vision 3D articielle Session 2: Essential and fundamental matrices, their computation, RANSAC algorithm Pascal Monasse monasse@imagine.enpc.fr IMAGINE, École des Ponts ParisTech Contents Some useful rules
Vision 3D articielle Session 2: Essential and fundamental matrices, their computation, RANSAC algorithm Pascal Monasse monasse@imagine.enpc.fr IMAGINE, École des Ponts ParisTech Contents Some useful rules
6-3 Solving Systems by Elimination
 Another method for solving systems of equations is elimination. Like substitution, the goal of elimination is to get one equation that has only one variable. To do this by elimination, you add the two
Another method for solving systems of equations is elimination. Like substitution, the goal of elimination is to get one equation that has only one variable. To do this by elimination, you add the two
CAP 5415 Computer Vision
 CAP 545 Computer Vision Dr. Mubarak Sa Univ. o Central Florida Filtering Lecture-2 Contents Filtering/Smooting/Removing Noise Convolution/Correlation Image Derivatives Histogram Some Matlab Functions General
CAP 545 Computer Vision Dr. Mubarak Sa Univ. o Central Florida Filtering Lecture-2 Contents Filtering/Smooting/Removing Noise Convolution/Correlation Image Derivatives Histogram Some Matlab Functions General
Lecture 04 Image Filtering
 Institute of Informatics Institute of Neuroinformatics Lecture 04 Image Filtering Davide Scaramuzza 1 Lab Exercise 2 - Today afternoon Room ETH HG E 1.1 from 13:15 to 15:00 Work description: your first
Institute of Informatics Institute of Neuroinformatics Lecture 04 Image Filtering Davide Scaramuzza 1 Lab Exercise 2 - Today afternoon Room ETH HG E 1.1 from 13:15 to 15:00 Work description: your first