Introduction to Computer Vision. 2D Linear Systems
|
|
|
- Warren Berry
- 5 years ago
- Views:
Transcription
1 Introduction to Computer Vision D Linear Systems
2 Review: Linear Systems We define a system as a unit that converts an input function into an output function Independent variable System operator or Transfer function
3 Linear Time Invariant Discrete Time Systems x c (t) x[n] y[n] y r (t) A/D LTIS (H) D/A jω jω jω Ye ( ) = He ( ) Xe ( ) Y ( jω ) = H( jω) X ( jω) r H( jω) Ω < π / T H( jω ) = 0 Ω π / T c IF The input signal is bandlimited The Nyquist condition for sampling is met The digital system is linear and time invariant THEN The overall continuous time system is equivalent to a LTIS whose frequency response is H.
4 Overview of Linear Systems Let where f i (x) is an arbitrary input in the class of all inputs {f(x)}, and g i (x) is the corresponding output. If Then the system H is called a linear system. A linear system has the properties of additivity and homogeneity. 4
5 Linear Systems The system H is called shift invariant if for all f i (x) {f(x)} and for all x 0. This means that offsetting the independent variable of the input by x 0 causes the same offset in the independent variable of the output. Hence, the input-output relationship remains the same. 5
6 Linear Systems The operator H is said to be causal, and hence the system described by H is a causal system, if there is no output before there is an input. In other words, A linear system H is said to be stable if its response to any bounded input is bounded. That is, if where K and c are constants. 6
7 Linear Systems A unit impulse function, denoted δ(a), is defined by the expression δ(a) δ(x-a) x a The response of a system to a unit impulse function is called the impulse response of the system. h(x) = H[δ(x)] 7
8 Linear Systems If H is a linear shift-invariant system, then we can find its reponse to any input signal f(x) as follows: This expression is called the convolution integral. It states that the response of a linear, fixed-parameter system is completely characterized by the convolution of the input with the system impulse response. 8
9 Linear Systems Convolution of two functions of a continuous variable is defined as f ( x)* h( x) = f( α) h( x α) dα In the discrete case f [ n]* h[ n] = f[ m] h[ n m] m= 9
10 Linear Systems In the D discrete case f [ n, n ]** h[ n, n ] = f[ m, m ] h[ n m, n m ] m = m = hn [, n] is a linear filter. 0

 f(α,β)g(x - α,y - β) B (c) α y x β x α y Volume =")
11 Illustration of the folding, displacement, and multiplication steps needed to perform two-dimensional convolution f(α,β) g(α,β) (a) α A B β α β (b) g(x - α,y - β) f(α,β)g(x - α,y - β) B (c) α y x β x α y Volume = f(x,y) g(x,y) β (d)
12 Matrix perspective i f c h e b g d a step c b a a b c f e d d e f i h g g h i step
13 Convolution Example h f Rotate From C. Rasmussen, U. of Delaware
14 4 Convolution Example Step f f*h h - - -
15 5 Convolution Example f f*h h - - -
16 6 Convolution Example f f*h h - - -
17 7 Convolution Example f f*h - - -
18 8 Convolution Example f f*h h - - -
19 9 Convolution Example f f*h h - - -
20 Convolution Example and so on From C. Rasmussen, U. of Delaware 0

21 Example: averaging 9 * = Integration

22 Example: edge detection 8 * = Deriving
23 Try MATLAB f=imread( saturn.tif ); figure; imshow(f); [height,width]=size(f); f=f(:height/,:width/); figure; imshow(f); [height,width=size(f); f=double(f)+0*rand(height,width); figure;imshow(uint8(f)); h=[ ; ; ; ]/6; g=conv(f,h); figure;imshow(uint8(g));

24 Gaussian Lowpass Filter 4

25 Gaussian Lowpass Denoising Original σ = σ = 4 5
26 Image Processing Algorithms
27 IP Algorithms Spatial domain Operations are performed in the image domain Image matrix of number Examples luminance adaptation chromatic adaptation contrast enhancement spatial filtering edge detection noise reduction Transform domain Some operators are used to project the image in another space Operations are performed in the transformed domain Fourier (DCT, FFT) Wavelet (DWT,CWT) Examples coding denoising image analysis Most of the tasks can be implemented both in the image and in the transformed domain. The choice depends on the context and the specific application. 7
28 Spatial domain processing Pixel-wise Operations involve the single pixel Operations: histogram equalization change of the colorspace addition/subtraction of images get negative of an image Applications: luminance adaptation contrast enhancement chromatic adaptation Local-wise The neighbourhood of the considered pixel is involved Any operation involving digital filters is local-wise Operations: correlation convolution filtering transformation Applications smoothing sharpening noise reduction edge detection 8
29 Pixel-wise operations Histogram Straching/shrinking, sliding Equalization

.")
30 Pixel-wise: Histogram equalization Pixel features: luminance, color, Histogram equalization: shapes the intensity histogram to approximate a specified distribution It is often used for enhancing contrast by shaping the image histogram to a uniform distribution over a given number of grey levels. The grey values are redistributed over the dynamic range to have a constant number of samples in each interval (i.e. histogram bin). Can also be applied to colormaps of color images. 0





31 Histogram equalization Can be used to compensate the distortions in the gray level distribution due to the non-linearity of a system component Gamma function = < > top top top bottom bottom bottom low height low height low height gamma=0. gamma=4
32 Histogram equalization Enhances the contrast of images by transforming the values in an intensity image so that the histogram of the output image approximately matches a specified histogram also applies to the values in the colormap of an indexed image
33 Histogram Function H=H(g) indicating the number of pixels having gray-value equal to g Non-normalized images: 0 g 55 bin-size, can be integer Normalized images: 0 g bin-size< H(l) 0 g i or 55 g A A = = max 0 N g i= Hgdg ( ) H[ g ] i area under the curve=number of pixels In the continuous case da( g) A( g) A( g +Δg) Hg ( ) = = lim dg Δg 0 Δg
34 Example: region-based segmentation If the two regions have different graylevel distributions (histograms) then it is possible to split them by exploiting such an information A H A H 4
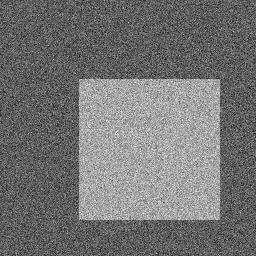

35 Example: region-based segmentation 5
36 Types of operations Histogram equalization contrast enhancement Histogram stratching/shrinking expansion/compression of the dynamic range Loss of resolution (the same set of pixel values are represented by a subset of graylevel values) Histogram sliding change of the mean level 6
37 H. stratching/shrinking 0 I g min stretch[ I ] = g g + g 0 0 g max g min g g g 0 max 0 min max min max min min = max I[ i, j] = maximum gray value in the original image g min I[ i, j] = minimum gray value in the original image g, g = maximum and minimum gray values in the processed image 7

38 H. original 8
39 H. shrinked 9

40 H. stratched 40

41 H. sliding 4
42 H. stratching/shrinking stratching shrinking 4
43 4
44 Linear graylevel transformations g new H b g old g H H g g 44
45 Non-linear tranformations Used to emphasize mid-range levels g new = g old + g old C (g old,max -g old ) g new g old 45
46 Common transformations g out g out g in g in g out ldg out g in Intensity slicing g in 46
47 Sigmoid transformation (soft thresholding) g out H(g in ) H(g out ) g in g in g out 47
48 Histogram transformation g f g g f g f out = ( in ) in = ( out ), non-decreasing function Hg ( ) Hg ( ), namely in out H f g f Hg ( out ) =, f' = f '[ f ( g )] g [ ( out )] out 48
49 Histogram equalization Let x be a random variable and let n i be the number of occurrences of gray level i. The probability of an occurrence of (a pixel of level) i in the image is L being the total number of gray levels in the image, n being the total number of pixels in the image, and p x being in fact the image's histogram, normalized to [0,]. Let us also define the cumulative distribution function corresponding to p x as 49
50 We would like to create a transformation of the form y = T(x) to produce a new image {y}, such that its CDF will be linearized across the value range, i.e. cdf () i = K i y The properties of the CDF allow us to perform such a transform it is defined as y = T( x) = cdf ( x) x 50
51 Pictorially p x pdf p y pdf /g max cdf g max g cdf g max g cdf x cdf y /g max g max g g max g 5
52 5


53 5


54 54
55 Neighborhood operations Correlation pattern recognition Convolution Linear filtering Edge detection Denoising
56 Correlation Correlation Measures the similarity between two signals Difference from convolution: no minus signs in the formula the signals need only to be translated f [ m, n] htemplate[ m+ k, n+ C ( m, n) = r] k r g... Application database matching result pattern 56
57 Convolution g[ m, n] = f [ m, n] hfilter[ m, n] = f [ m, n] h G( jω, jω ) = x y F( jω, x jω ) H y k, r filter ( jω, x jω ) y filter [ k m, r n] f [ m, n]:original(input)image g[ m, n]:filtered(output)image h filter [ m, n]:filter impulseresponse 57
58 Convolution and digital filtering Digital filtering consists of a convolution between the image and the impulse response of the filter, which is also referred to as convolution kernel. Warning: both the image and the filter are matrices (D). If the filter is separable, then the D convolution can be implemented as a cascade of two D convolutions Filter types FIR (Finite Impulse Response) IIR (Infinite IR) 58
59 Ideal low-pass digital filter H(Ω) -π -Ω c Ω c Ω N π Ω Digital LP filter (discrete time) The boundary between the pass-band and the stop-band is sharp The spectrum is periodic The repetitions are located at integer multiples of π The low-pass filtered signal is still a digital signal, but with a different frequency content The impulse response h[n] in the signal domain is discrete time and corresponds to the sinc[] function Reconstruction LP filter (continuous time) The boundary between the pass-band and the stop-band is sharp The spectrum consists of one repetition only The low-pass filtered signal is a continuous time signal, that might have a different frequency content The impulse response h(t) in the signal domain is continuous time and corresponds to the sinc() function 59
60 Digital LP filtering H(Ω) -π -Ω c Ω c π F(Ω) low-pass filtered (digital) signal F(Ω) H(Ω) 60
61 Low-pass LP and HP filtering High-pass H LP (Ω) H HP (Ω) h LP [n] h HP [n] n n averaging 6
62 Example: Chebyshev LP 6
63 Example: Chebyshev HP 6
64 Example: Chebyshev Impulse Response 64
65 Example: Chebyshev Step Response 65
66 Example: filtered signal The transfer function (or, equivalently, the impulse response) of the filter determines the characteristics of the resulting signal 66
67 Switching to images qui Images are D digital signals (matrices) filters are matrices Low-pass averaging (interpolation) smoothing High-pass differentiation emphasize image details like lines, and, more in general, sharp variations of the luminance Band-pass: same as high pass but selecting a predefined range of spatial frequencies Splitting low-pass and high-pass image features is the ground of multiresolution. It is advantageous for many tasks like contour extraction (edge detection), image compression, feature extraction for pattern recognition, image denoising etc. 67





68 68 D filters Low-pass High-pass = 9 h lowpass = 8 h highpass
69 Filtering in image domain Filtering in image domain is performed by convolving the image with the filter kernel. This operation can be though of as a pixel-by-pixel product of the image with a moving kernel, followed by the sum of the pixel-wise output. 69

70 Low-pass filtering: example f[m,n] h lowpass [m,n] g[m,n] x = 70


71 Averaging h lp =/5 7

72 Gaussian h lp =


73 Log

74 Asymmetric LP h lp =/

75 Asymmetric HP h lp =




76 Sharpening Goal: improve image quality Solutions increase relative importance of details, by increasing the relative weight of high frequencies components Increase a subset of high frequencies (non symmetric HP) High-boost filter Laplacian gradient The original image is assumed to be available 76
77 Sharpening Filters To highlight fine detail or to enhance blurred details Averaging filters smooth out noise but also blur details Sharpening filters enhance details May also create artifacts (amplify noise) Background: Derivative is higher when changes are abrupt Categories of sharpening filters: Basic highpass spatial filtering High-boost filtering 77
78 Sharpening Original image HP Normalization + Sharpened image Normalization The normalization step subtracts the mean and scales the amplitude of the resulting image by dividing it for the dynamic range (graylevel values are now in the range 0-55) For the sharpening to be visible, the sharpened and original images must then be displayed using the same set of graylevel values 78
79 Basic Highpass Spatial Filtering The filter should have positive coefficients near the center and negative in the outer periphery: Laplacian mask Other Laplacian masks (normalization factor is missing) 79
80 Basic Highpass Spatial Filtering The sum of the coefficients is 0, indicating that when the filter is passing over regions of almost stable gray levels, the output of the mask is 0 or very small. The output is high when the center value differ from the periphery. The output image does not look like the original one. The output image depicts all the fine details Some scaling and/or clipping is involved (to compensate for possible negative gray levels after filtering). 80
81 8
82 High boost Examples 8
83 High-boost Filtering Highpass filtered image = Original lowpass filtered image If A is an amplification factor, then: High-boost = A original lowpass = (A-) original + original lowpass = (A-) original + highpass Unsharp masking (if A=) 8
84 Unsharp Masking and Sharpening operation Signal Low- pass () () High-pass () = () - () (A-) () + () 84
85 High-boost Filtering A= : standard highpass result A > : the high-boost image looks more like the original with a degree of edge enhancement, depending on the value of A. A > Unsharp masking w=9a-, A 85
86 86

87 Unsharp masking 87
88 Sharpening: asymmetric HP 88
89 Sharpening: the importance of phase 89

90 Sharpening: the importance of phase 90
91 Sharpening: the importance of phase 9
92 Sharpening: the importance of phase 9
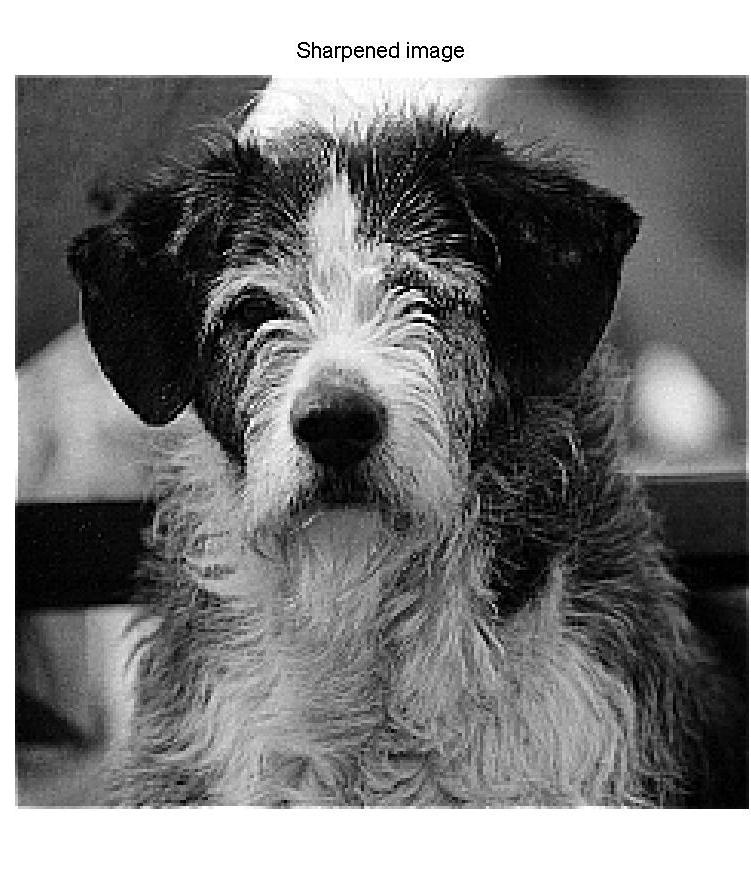
93 Back to the natural image 9
Image Enhancement in the frequency domain. GZ Chapter 4
 Image Enhancement in the frequency domain GZ Chapter 4 Contents In this lecture we will look at image enhancement in the frequency domain The Fourier series & the Fourier transform Image Processing in
Image Enhancement in the frequency domain GZ Chapter 4 Contents In this lecture we will look at image enhancement in the frequency domain The Fourier series & the Fourier transform Image Processing in
CITS 4402 Computer Vision
 CITS 4402 Computer Vision Prof Ajmal Mian Adj/A/Prof Mehdi Ravanbakhsh, CEO at Mapizy (www.mapizy.com) and InFarm (www.infarm.io) Lecture 04 Greyscale Image Analysis Lecture 03 Summary Images as 2-D signals
CITS 4402 Computer Vision Prof Ajmal Mian Adj/A/Prof Mehdi Ravanbakhsh, CEO at Mapizy (www.mapizy.com) and InFarm (www.infarm.io) Lecture 04 Greyscale Image Analysis Lecture 03 Summary Images as 2-D signals
18/10/2017. Image Enhancement in the Spatial Domain: Gray-level transforms. Image Enhancement in the Spatial Domain: Gray-level transforms
 Gray-level transforms Gray-level transforms Generic, possibly nonlinear, pointwise operator (intensity mapping, gray-level transformation): Basic gray-level transformations: Negative: s L 1 r Generic log:
Gray-level transforms Gray-level transforms Generic, possibly nonlinear, pointwise operator (intensity mapping, gray-level transformation): Basic gray-level transformations: Negative: s L 1 r Generic log:
Fourier Transforms 1D
 Fourier Transforms 1D 3D Image Processing Alireza Ghane 1 Overview Recap Intuitions Function representations shift-invariant spaces linear, time-invariant (LTI) systems complex numbers Fourier Transforms
Fourier Transforms 1D 3D Image Processing Alireza Ghane 1 Overview Recap Intuitions Function representations shift-invariant spaces linear, time-invariant (LTI) systems complex numbers Fourier Transforms
ECG782: Multidimensional Digital Signal Processing
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Filtering in the Frequency Domain http://www.ee.unlv.edu/~b1morris/ecg782/ 2 Outline Background
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Filtering in the Frequency Domain http://www.ee.unlv.edu/~b1morris/ecg782/ 2 Outline Background
Local enhancement. Local Enhancement. Local histogram equalized. Histogram equalized. Local Contrast Enhancement. Fig 3.23: Another example
 Local enhancement Local Enhancement Median filtering Local Enhancement Sometimes Local Enhancement is Preferred. Malab: BlkProc operation for block processing. Left: original tire image. 0/07/00 Local
Local enhancement Local Enhancement Median filtering Local Enhancement Sometimes Local Enhancement is Preferred. Malab: BlkProc operation for block processing. Left: original tire image. 0/07/00 Local
Basics on 2-D 2 D Random Signal
 Basics on -D D Random Signal Spring 06 Instructor: K. J. Ray Liu ECE Department, Univ. of Maryland, College Park Overview Last Time: Fourier Analysis for -D signals Image enhancement via spatial filtering
Basics on -D D Random Signal Spring 06 Instructor: K. J. Ray Liu ECE Department, Univ. of Maryland, College Park Overview Last Time: Fourier Analysis for -D signals Image enhancement via spatial filtering
Local Enhancement. Local enhancement
 Local Enhancement Local Enhancement Median filtering (see notes/slides, 3.5.2) HW4 due next Wednesday Required Reading: Sections 3.3, 3.4, 3.5, 3.6, 3.7 Local Enhancement 1 Local enhancement Sometimes
Local Enhancement Local Enhancement Median filtering (see notes/slides, 3.5.2) HW4 due next Wednesday Required Reading: Sections 3.3, 3.4, 3.5, 3.6, 3.7 Local Enhancement 1 Local enhancement Sometimes
Multiscale Image Transforms
 Multiscale Image Transforms Goal: Develop filter-based representations to decompose images into component parts, to extract features/structures of interest, and to attenuate noise. Motivation: extract
Multiscale Image Transforms Goal: Develop filter-based representations to decompose images into component parts, to extract features/structures of interest, and to attenuate noise. Motivation: extract
Lecture 3: Linear Filters
 Lecture 3: Linear Filters Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Images as functions Linear systems (filters) Convolution and correlation Discrete Fourier Transform (DFT)
Lecture 3: Linear Filters Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Images as functions Linear systems (filters) Convolution and correlation Discrete Fourier Transform (DFT)
Lecture 3: Linear Filters
 Lecture 3: Linear Filters Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Images as functions Linear systems (filters) Convolution and correlation Discrete Fourier Transform (DFT)
Lecture 3: Linear Filters Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Images as functions Linear systems (filters) Convolution and correlation Discrete Fourier Transform (DFT)
Image Enhancement: Methods. Digital Image Processing. No Explicit definition. Spatial Domain: Frequency Domain:
 Image Enhancement: No Explicit definition Methods Spatial Domain: Linear Nonlinear Frequency Domain: Linear Nonlinear 1 Spatial Domain Process,, g x y T f x y 2 For 1 1 neighborhood: Contrast Enhancement/Stretching/Point
Image Enhancement: No Explicit definition Methods Spatial Domain: Linear Nonlinear Frequency Domain: Linear Nonlinear 1 Spatial Domain Process,, g x y T f x y 2 For 1 1 neighborhood: Contrast Enhancement/Stretching/Point
Convolution. Define a mathematical operation on discrete-time signals called convolution, represented by *. Given two discrete-time signals x 1, x 2,
 Filters Filters So far: Sound signals, connection to Fourier Series, Introduction to Fourier Series and Transforms, Introduction to the FFT Today Filters Filters: Keep part of the signal we are interested
Filters Filters So far: Sound signals, connection to Fourier Series, Introduction to Fourier Series and Transforms, Introduction to the FFT Today Filters Filters: Keep part of the signal we are interested
Empirical Mean and Variance!
 Global Image Properties! Global image properties refer to an image as a whole rather than components. Computation of global image properties is often required for image enhancement, preceding image analysis.!
Global Image Properties! Global image properties refer to an image as a whole rather than components. Computation of global image properties is often required for image enhancement, preceding image analysis.!
IMAGE ENHANCEMENT II (CONVOLUTION)
") MOTIVATION Recorded images often exhibit problems such as: blurry noisy Image enhancement aims to improve visual quality Cosmetic processing Usually empirical techniques, with ad hoc parameters ( whatever
MOTIVATION Recorded images often exhibit problems such as: blurry noisy Image enhancement aims to improve visual quality Cosmetic processing Usually empirical techniques, with ad hoc parameters ( whatever
Digital Image Processing. Filtering in the Frequency Domain
 2D Linear Systems 2D Fourier Transform and its Properties The Basics of Filtering in Frequency Domain Image Smoothing Image Sharpening Selective Filtering Implementation Tips 1 General Definition: System
2D Linear Systems 2D Fourier Transform and its Properties The Basics of Filtering in Frequency Domain Image Smoothing Image Sharpening Selective Filtering Implementation Tips 1 General Definition: System
ECE Digital Image Processing and Introduction to Computer Vision. Outline
 2/9/7 ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 207. Recap Outline 2. Sharpening Filtering Illustration
2/9/7 ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 207. Recap Outline 2. Sharpening Filtering Illustration
Histogram Processing
 Histogram Processing The histogram of a digital image with gray levels in the range [0,L-] is a discrete function h ( r k ) = n k where r k n k = k th gray level = number of pixels in the image having
Histogram Processing The histogram of a digital image with gray levels in the range [0,L-] is a discrete function h ( r k ) = n k where r k n k = k th gray level = number of pixels in the image having
Intensity Transformations and Spatial Filtering: WHICH ONE LOOKS BETTER? Intensity Transformations and Spatial Filtering: WHICH ONE LOOKS BETTER?
 : WHICH ONE LOOKS BETTER? 3.1 : WHICH ONE LOOKS BETTER? 3.2 1 Goal: Image enhancement seeks to improve the visual appearance of an image, or convert it to a form suited for analysis by a human or a machine.
: WHICH ONE LOOKS BETTER? 3.1 : WHICH ONE LOOKS BETTER? 3.2 1 Goal: Image enhancement seeks to improve the visual appearance of an image, or convert it to a form suited for analysis by a human or a machine.
Reading. 3. Image processing. Pixel movement. Image processing Y R I G Q
 Reading Jain, Kasturi, Schunck, Machine Vision. McGraw-Hill, 1995. Sections 4.-4.4, 4.5(intro), 4.5.5, 4.5.6, 5.1-5.4. 3. Image processing 1 Image processing An image processing operation typically defines
Reading Jain, Kasturi, Schunck, Machine Vision. McGraw-Hill, 1995. Sections 4.-4.4, 4.5(intro), 4.5.5, 4.5.6, 5.1-5.4. 3. Image processing 1 Image processing An image processing operation typically defines
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 11 Oct 3 rd, 2017 Pranav Mantini Slides from Dr. Shishir K Shah, and Frank Liu Review: 2D Discrete Fourier Transform If I is an image of size N then Sin
Digital Image Processing COSC 6380/4393 Lecture 11 Oct 3 rd, 2017 Pranav Mantini Slides from Dr. Shishir K Shah, and Frank Liu Review: 2D Discrete Fourier Transform If I is an image of size N then Sin
Machine vision, spring 2018 Summary 4
 Machine vision Summary # 4 The mask for Laplacian is given L = 4 (6) Another Laplacian mask that gives more importance to the center element is given by L = 8 (7) Note that the sum of the elements in the
Machine vision Summary # 4 The mask for Laplacian is given L = 4 (6) Another Laplacian mask that gives more importance to the center element is given by L = 8 (7) Note that the sum of the elements in the
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 13 Oct 2 nd, 2018 Pranav Mantini Slides from Dr. Shishir K Shah, and Frank Liu Review f 0 0 0 1 0 0 0 0 w 1 2 3 2 8 Zero Padding 0 0 0 0 0 0 0 1 0 0 0 0
Digital Image Processing COSC 6380/4393 Lecture 13 Oct 2 nd, 2018 Pranav Mantini Slides from Dr. Shishir K Shah, and Frank Liu Review f 0 0 0 1 0 0 0 0 w 1 2 3 2 8 Zero Padding 0 0 0 0 0 0 0 1 0 0 0 0
Computer Vision & Digital Image Processing
 Computer Vision & Digital Image Processing Image Restoration and Reconstruction I Dr. D. J. Jackson Lecture 11-1 Image restoration Restoration is an objective process that attempts to recover an image
Computer Vision & Digital Image Processing Image Restoration and Reconstruction I Dr. D. J. Jackson Lecture 11-1 Image restoration Restoration is an objective process that attempts to recover an image
Wavelets and Multiresolution Processing
 Wavelets and Multiresolution Processing Wavelets Fourier transform has it basis functions in sinusoids Wavelets based on small waves of varying frequency and limited duration In addition to frequency,
Wavelets and Multiresolution Processing Wavelets Fourier transform has it basis functions in sinusoids Wavelets based on small waves of varying frequency and limited duration In addition to frequency,
Linear Operators and Fourier Transform
 Linear Operators and Fourier Transform DD2423 Image Analysis and Computer Vision Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 13, 2013
Linear Operators and Fourier Transform DD2423 Image Analysis and Computer Vision Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 13, 2013
Machine vision. Summary # 4. The mask for Laplacian is given
 1 Machine vision Summary # 4 The mask for Laplacian is given L = 0 1 0 1 4 1 (6) 0 1 0 Another Laplacian mask that gives more importance to the center element is L = 1 1 1 1 8 1 (7) 1 1 1 Note that the
1 Machine vision Summary # 4 The mask for Laplacian is given L = 0 1 0 1 4 1 (6) 0 1 0 Another Laplacian mask that gives more importance to the center element is L = 1 1 1 1 8 1 (7) 1 1 1 Note that the
Lecture 04 Image Filtering
 Institute of Informatics Institute of Neuroinformatics Lecture 04 Image Filtering Davide Scaramuzza 1 Lab Exercise 2 - Today afternoon Room ETH HG E 1.1 from 13:15 to 15:00 Work description: your first
Institute of Informatics Institute of Neuroinformatics Lecture 04 Image Filtering Davide Scaramuzza 1 Lab Exercise 2 - Today afternoon Room ETH HG E 1.1 from 13:15 to 15:00 Work description: your first
Image Filtering. Slides, adapted from. Steve Seitz and Rick Szeliski, U.Washington
 Image Filtering Slides, adapted from Steve Seitz and Rick Szeliski, U.Washington The power of blur All is Vanity by Charles Allen Gillbert (1873-1929) Harmon LD & JuleszB (1973) The recognition of faces.
Image Filtering Slides, adapted from Steve Seitz and Rick Szeliski, U.Washington The power of blur All is Vanity by Charles Allen Gillbert (1873-1929) Harmon LD & JuleszB (1973) The recognition of faces.
Filter structures ELEC-E5410
 Filter structures ELEC-E5410 Contents FIR filter basics Ideal impulse responses Polyphase decomposition Fractional delay by polyphase structure Nyquist filters Half-band filters Gibbs phenomenon Discrete-time
Filter structures ELEC-E5410 Contents FIR filter basics Ideal impulse responses Polyphase decomposition Fractional delay by polyphase structure Nyquist filters Half-band filters Gibbs phenomenon Discrete-time
Multimedia Databases. Previous Lecture. 4.1 Multiresolution Analysis. 4 Shape-based Features. 4.1 Multiresolution Analysis
 Previous Lecture Multimedia Databases Texture-Based Image Retrieval Low Level Features Tamura Measure, Random Field Model High-Level Features Fourier-Transform, Wavelets Wolf-Tilo Balke Silviu Homoceanu
Previous Lecture Multimedia Databases Texture-Based Image Retrieval Low Level Features Tamura Measure, Random Field Model High-Level Features Fourier-Transform, Wavelets Wolf-Tilo Balke Silviu Homoceanu
Multimedia Databases. Wolf-Tilo Balke Philipp Wille Institut für Informationssysteme Technische Universität Braunschweig
 Multimedia Databases Wolf-Tilo Balke Philipp Wille Institut für Informationssysteme Technische Universität Braunschweig http://www.ifis.cs.tu-bs.de 4 Previous Lecture Texture-Based Image Retrieval Low
Multimedia Databases Wolf-Tilo Balke Philipp Wille Institut für Informationssysteme Technische Universität Braunschweig http://www.ifis.cs.tu-bs.de 4 Previous Lecture Texture-Based Image Retrieval Low
Linear Convolution Using FFT
 Linear Convolution Using FFT Another useful property is that we can perform circular convolution and see how many points remain the same as those of linear convolution. When P < L and an L-point circular
Linear Convolution Using FFT Another useful property is that we can perform circular convolution and see how many points remain the same as those of linear convolution. When P < L and an L-point circular
COMP344 Digital Image Processing Fall 2007 Final Examination
 COMP344 Digital Image Processing Fall 2007 Final Examination Time allowed: 2 hours Name Student ID Email Question 1 Question 2 Question 3 Question 4 Question 5 Question 6 Total With model answer HK University
COMP344 Digital Image Processing Fall 2007 Final Examination Time allowed: 2 hours Name Student ID Email Question 1 Question 2 Question 3 Question 4 Question 5 Question 6 Total With model answer HK University
Today s lecture. Local neighbourhood processing. The convolution. Removing uncorrelated noise from an image The Fourier transform
 Cris Luengo TD396 fall 4 cris@cbuuse Today s lecture Local neighbourhood processing smoothing an image sharpening an image The convolution What is it? What is it useful for? How can I compute it? Removing
Cris Luengo TD396 fall 4 cris@cbuuse Today s lecture Local neighbourhood processing smoothing an image sharpening an image The convolution What is it? What is it useful for? How can I compute it? Removing
3. Lecture. Fourier Transformation Sampling
 3. Lecture Fourier Transformation Sampling Some slides taken from Digital Image Processing: An Algorithmic Introduction using Java, Wilhelm Burger and Mark James Burge Separability ² The 2D DFT can be
3. Lecture Fourier Transformation Sampling Some slides taken from Digital Image Processing: An Algorithmic Introduction using Java, Wilhelm Burger and Mark James Burge Separability ² The 2D DFT can be
Multirate signal processing
 Multirate signal processing Discrete-time systems with different sampling rates at various parts of the system are called multirate systems. The need for such systems arises in many applications, including
Multirate signal processing Discrete-time systems with different sampling rates at various parts of the system are called multirate systems. The need for such systems arises in many applications, including
Multiresolution image processing
 Multiresolution image processing Laplacian pyramids Some applications of Laplacian pyramids Discrete Wavelet Transform (DWT) Wavelet theory Wavelet image compression Bernd Girod: EE368 Digital Image Processing
Multiresolution image processing Laplacian pyramids Some applications of Laplacian pyramids Discrete Wavelet Transform (DWT) Wavelet theory Wavelet image compression Bernd Girod: EE368 Digital Image Processing
G52IVG, School of Computer Science, University of Nottingham
 Image Transforms Fourier Transform Basic idea 1 Image Transforms Fourier transform theory Let f(x) be a continuous function of a real variable x. The Fourier transform of f(x) is F ( u) f ( x)exp[ j2πux]
Image Transforms Fourier Transform Basic idea 1 Image Transforms Fourier transform theory Let f(x) be a continuous function of a real variable x. The Fourier transform of f(x) is F ( u) f ( x)exp[ j2πux]
The Frequency Domain : Computational Photography Alexei Efros, CMU, Fall Many slides borrowed from Steve Seitz
 The Frequency Domain 15-463: Computational Photography Alexei Efros, CMU, Fall 2008 Somewhere in Cinque Terre, May 2005 Many slides borrowed from Steve Seitz Salvador Dali Gala Contemplating the Mediterranean
The Frequency Domain 15-463: Computational Photography Alexei Efros, CMU, Fall 2008 Somewhere in Cinque Terre, May 2005 Many slides borrowed from Steve Seitz Salvador Dali Gala Contemplating the Mediterranean
TRACKING and DETECTION in COMPUTER VISION Filtering and edge detection
 Technischen Universität München Winter Semester 0/0 TRACKING and DETECTION in COMPUTER VISION Filtering and edge detection Slobodan Ilić Overview Image formation Convolution Non-liner filtering: Median
Technischen Universität München Winter Semester 0/0 TRACKING and DETECTION in COMPUTER VISION Filtering and edge detection Slobodan Ilić Overview Image formation Convolution Non-liner filtering: Median
Image Processing. Waleed A. Yousef Faculty of Computers and Information, Helwan University. April 3, 2010
 Image Processing Waleed A. Yousef Faculty of Computers and Information, Helwan University. April 3, 2010 Ch3. Image Enhancement in the Spatial Domain Note that T (m) = 0.5 E. The general law of contrast
Image Processing Waleed A. Yousef Faculty of Computers and Information, Helwan University. April 3, 2010 Ch3. Image Enhancement in the Spatial Domain Note that T (m) = 0.5 E. The general law of contrast
Multimedia Databases. 4 Shape-based Features. 4.1 Multiresolution Analysis. 4.1 Multiresolution Analysis. 4.1 Multiresolution Analysis
 4 Shape-based Features Multimedia Databases Wolf-Tilo Balke Silviu Homoceanu Institut für Informationssysteme Technische Universität Braunschweig http://www.ifis.cs.tu-bs.de 4 Multiresolution Analysis
4 Shape-based Features Multimedia Databases Wolf-Tilo Balke Silviu Homoceanu Institut für Informationssysteme Technische Universität Braunschweig http://www.ifis.cs.tu-bs.de 4 Multiresolution Analysis
Digital Image Processing
 Digital Image Processing, 2nd ed. Digital Image Processing Chapter 7 Wavelets and Multiresolution Processing Dr. Kai Shuang Department of Electronic Engineering China University of Petroleum shuangkai@cup.edu.cn
Digital Image Processing, 2nd ed. Digital Image Processing Chapter 7 Wavelets and Multiresolution Processing Dr. Kai Shuang Department of Electronic Engineering China University of Petroleum shuangkai@cup.edu.cn
Digital Signal Processing
 COMP ENG 4TL4: Digital Signal Processing Notes for Lecture #20 Wednesday, October 22, 2003 6.4 The Phase Response and Distortionless Transmission In most filter applications, the magnitude response H(e
COMP ENG 4TL4: Digital Signal Processing Notes for Lecture #20 Wednesday, October 22, 2003 6.4 The Phase Response and Distortionless Transmission In most filter applications, the magnitude response H(e
UNIVERSITI SAINS MALAYSIA. EEE 512/4 Advanced Digital Signal and Image Processing
 -1- [EEE 512/4] UNIVERSITI SAINS MALAYSIA First Semester Examination 2013/2014 Academic Session December 2013 / January 2014 EEE 512/4 Advanced Digital Signal and Image Processing Duration : 3 hours Please
-1- [EEE 512/4] UNIVERSITI SAINS MALAYSIA First Semester Examination 2013/2014 Academic Session December 2013 / January 2014 EEE 512/4 Advanced Digital Signal and Image Processing Duration : 3 hours Please
Convolution Spatial Aliasing Frequency domain filtering fundamentals Applications Image smoothing Image sharpening
 Frequency Domain Filtering Correspondence between Spatial and Frequency Filtering Fourier Transform Brief Introduction Sampling Theory 2 D Discrete Fourier Transform Convolution Spatial Aliasing Frequency
Frequency Domain Filtering Correspondence between Spatial and Frequency Filtering Fourier Transform Brief Introduction Sampling Theory 2 D Discrete Fourier Transform Convolution Spatial Aliasing Frequency
Multirate Digital Signal Processing
 Multirate Digital Signal Processing Basic Sampling Rate Alteration Devices Up-sampler - Used to increase the sampling rate by an integer factor Down-sampler - Used to decrease the sampling rate by an integer
Multirate Digital Signal Processing Basic Sampling Rate Alteration Devices Up-sampler - Used to increase the sampling rate by an integer factor Down-sampler - Used to decrease the sampling rate by an integer
Discrete-time signals and systems
 Discrete-time signals and systems 1 DISCRETE-TIME DYNAMICAL SYSTEMS x(t) G y(t) Linear system: Output y(n) is a linear function of the inputs sequence: y(n) = k= h(k)x(n k) h(k): impulse response of the
Discrete-time signals and systems 1 DISCRETE-TIME DYNAMICAL SYSTEMS x(t) G y(t) Linear system: Output y(n) is a linear function of the inputs sequence: y(n) = k= h(k)x(n k) h(k): impulse response of the
The Frequency Domain, without tears. Many slides borrowed from Steve Seitz
 The Frequency Domain, without tears Many slides borrowed from Steve Seitz Somewhere in Cinque Terre, May 2005 CS194: Image Manipulation & Computational Photography Alexei Efros, UC Berkeley, Fall 2016
The Frequency Domain, without tears Many slides borrowed from Steve Seitz Somewhere in Cinque Terre, May 2005 CS194: Image Manipulation & Computational Photography Alexei Efros, UC Berkeley, Fall 2016
Digital Image Processing. Lecture 6 (Enhancement) Bu-Ali Sina University Computer Engineering Dep. Fall 2009
 Bu-Ali Sina University Computer Engineering Dep. Fall 2009") Digital Image Processing Lecture 6 (Enhancement) Bu-Ali Sina University Computer Engineering Dep. Fall 009 Outline Image Enhancement in Spatial Domain Spatial Filtering Smoothing Filters Median Filter
Digital Image Processing Lecture 6 (Enhancement) Bu-Ali Sina University Computer Engineering Dep. Fall 009 Outline Image Enhancement in Spatial Domain Spatial Filtering Smoothing Filters Median Filter
Multiresolution schemes
 Multiresolution schemes Fondamenti di elaborazione del segnale multi-dimensionale Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Elaborazione dei Segnali Multi-dimensionali e
Multiresolution schemes Fondamenti di elaborazione del segnale multi-dimensionale Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Elaborazione dei Segnali Multi-dimensionali e
Chapter 4 Image Enhancement in the Frequency Domain
 Chapter 4 Image Enhancement in the Frequency Domain Yinghua He School of Computer Science and Technology Tianjin University Background Introduction to the Fourier Transform and the Frequency Domain Smoothing
Chapter 4 Image Enhancement in the Frequency Domain Yinghua He School of Computer Science and Technology Tianjin University Background Introduction to the Fourier Transform and the Frequency Domain Smoothing
Multidimensional digital signal processing
 PSfrag replacements Two-dimensional discrete signals N 1 A 2-D discrete signal (also N called a sequence or array) is a function 2 defined over thex(n set 1 of, n 2 ordered ) pairs of integers: y(nx 1,
PSfrag replacements Two-dimensional discrete signals N 1 A 2-D discrete signal (also N called a sequence or array) is a function 2 defined over thex(n set 1 of, n 2 ordered ) pairs of integers: y(nx 1,
Computer Vision. Filtering in the Frequency Domain
 Computer Vision Filtering in the Frequency Domain Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2016/2017 Introduction
Computer Vision Filtering in the Frequency Domain Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2016/2017 Introduction
Chapter 16. Local Operations
 Chapter 16 Local Operations g[x, y] =O{f[x ± x, y ± y]} In many common image processing operations, the output pixel is a weighted combination of the gray values of pixels in the neighborhood of the input
Chapter 16 Local Operations g[x, y] =O{f[x ± x, y ± y]} In many common image processing operations, the output pixel is a weighted combination of the gray values of pixels in the neighborhood of the input
Chapter 4: Filtering in the Frequency Domain. Fourier Analysis R. C. Gonzalez & R. E. Woods
 Fourier Analysis 1992 2008 R. C. Gonzalez & R. E. Woods Properties of δ (t) and (x) δ : f t) δ ( t t ) dt = f ( ) f x) δ ( x x ) = f ( ) ( 0 t0 x= ( 0 x0 1992 2008 R. C. Gonzalez & R. E. Woods Sampling
Fourier Analysis 1992 2008 R. C. Gonzalez & R. E. Woods Properties of δ (t) and (x) δ : f t) δ ( t t ) dt = f ( ) f x) δ ( x x ) = f ( ) ( 0 t0 x= ( 0 x0 1992 2008 R. C. Gonzalez & R. E. Woods Sampling
Review Smoothing Spatial Filters Sharpening Spatial Filters. Spatial Filtering. Dr. Praveen Sankaran. Department of ECE NIT Calicut.
 Spatial Filtering Dr. Praveen Sankaran Department of ECE NIT Calicut January 7, 203 Outline 2 Linear Nonlinear 3 Spatial Domain Refers to the image plane itself. Direct manipulation of image pixels. Figure:
Spatial Filtering Dr. Praveen Sankaran Department of ECE NIT Calicut January 7, 203 Outline 2 Linear Nonlinear 3 Spatial Domain Refers to the image plane itself. Direct manipulation of image pixels. Figure:
Screen-space processing Further Graphics
 Screen-space processing Rafał Mantiuk Computer Laboratory, University of Cambridge Cornell Box and tone-mapping Rendering Photograph 2 Real-world scenes are more challenging } The match could not be achieved
Screen-space processing Rafał Mantiuk Computer Laboratory, University of Cambridge Cornell Box and tone-mapping Rendering Photograph 2 Real-world scenes are more challenging } The match could not be achieved
I Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung University. Computer Vision: 4. Filtering
 I Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung University Computer Vision: 4. Filtering Outline Impulse response and convolution. Linear filter and image pyramid. Textbook: David A. Forsyth
I Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung University Computer Vision: 4. Filtering Outline Impulse response and convolution. Linear filter and image pyramid. Textbook: David A. Forsyth
Stability Condition in Terms of the Pole Locations
 Stability Condition in Terms of the Pole Locations A causal LTI digital filter is BIBO stable if and only if its impulse response h[n] is absolutely summable, i.e., 1 = S h [ n] < n= We now develop a stability
Stability Condition in Terms of the Pole Locations A causal LTI digital filter is BIBO stable if and only if its impulse response h[n] is absolutely summable, i.e., 1 = S h [ n] < n= We now develop a stability
Image Filtering, Edges and Image Representation
 Image Filtering, Edges and Image Representation Capturing what s important Req reading: Chapter 7, 9 F&P Adelson, Simoncelli and Freeman (handout online) Opt reading: Horn 7 & 8 FP 8 February 19, 8 A nice
Image Filtering, Edges and Image Representation Capturing what s important Req reading: Chapter 7, 9 F&P Adelson, Simoncelli and Freeman (handout online) Opt reading: Horn 7 & 8 FP 8 February 19, 8 A nice
MULTIRATE DIGITAL SIGNAL PROCESSING
 MULTIRATE DIGITAL SIGNAL PROCESSING Signal processing can be enhanced by changing sampling rate: Up-sampling before D/A conversion in order to relax requirements of analog antialiasing filter. Cf. audio
MULTIRATE DIGITAL SIGNAL PROCESSING Signal processing can be enhanced by changing sampling rate: Up-sampling before D/A conversion in order to relax requirements of analog antialiasing filter. Cf. audio
Multiresolution schemes
 Multiresolution schemes Fondamenti di elaborazione del segnale multi-dimensionale Multi-dimensional signal processing Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Elaborazione
Multiresolution schemes Fondamenti di elaborazione del segnale multi-dimensionale Multi-dimensional signal processing Stefano Ferrari Università degli Studi di Milano stefano.ferrari@unimi.it Elaborazione
ITK Filters. Thresholding Edge Detection Gradients Second Order Derivatives Neighborhood Filters Smoothing Filters Distance Map Image Transforms
 ITK Filters Thresholding Edge Detection Gradients Second Order Derivatives Neighborhood Filters Smoothing Filters Distance Map Image Transforms ITCS 6010:Biomedical Imaging and Visualization 1 ITK Filters:
ITK Filters Thresholding Edge Detection Gradients Second Order Derivatives Neighborhood Filters Smoothing Filters Distance Map Image Transforms ITCS 6010:Biomedical Imaging and Visualization 1 ITK Filters:
Basic Multi-rate Operations: Decimation and Interpolation
 1 Basic Multirate Operations 2 Interconnection of Building Blocks 1.1 Decimation and Interpolation 1.2 Digital Filter Banks Basic Multi-rate Operations: Decimation and Interpolation Building blocks for
1 Basic Multirate Operations 2 Interconnection of Building Blocks 1.1 Decimation and Interpolation 1.2 Digital Filter Banks Basic Multi-rate Operations: Decimation and Interpolation Building blocks for
Colorado School of Mines Image and Multidimensional Signal Processing
 Image and Multidimensional Signal Processing Professor William Hoff Department of Electrical Engineering and Computer Science Spatial Filtering Main idea Spatial filtering Define a neighborhood of a pixel
Image and Multidimensional Signal Processing Professor William Hoff Department of Electrical Engineering and Computer Science Spatial Filtering Main idea Spatial filtering Define a neighborhood of a pixel
The Frequency Domain. Many slides borrowed from Steve Seitz
 The Frequency Domain Many slides borrowed from Steve Seitz Somewhere in Cinque Terre, May 2005 15-463: Computational Photography Alexei Efros, CMU, Spring 2010 Salvador Dali Gala Contemplating the Mediterranean
The Frequency Domain Many slides borrowed from Steve Seitz Somewhere in Cinque Terre, May 2005 15-463: Computational Photography Alexei Efros, CMU, Spring 2010 Salvador Dali Gala Contemplating the Mediterranean
Digital Filters Ying Sun
 Digital Filters Ying Sun Digital filters Finite impulse response (FIR filter: h[n] has a finite numbers of terms. Infinite impulse response (IIR filter: h[n] has infinite numbers of terms. Causal filter:
Digital Filters Ying Sun Digital filters Finite impulse response (FIR filter: h[n] has a finite numbers of terms. Infinite impulse response (IIR filter: h[n] has infinite numbers of terms. Causal filter:
ECG782: Multidimensional Digital Signal Processing
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 05 Image Processing Basics 13/02/04 http://www.ee.unlv.edu/~b1morris/ecg782/
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 05 Image Processing Basics 13/02/04 http://www.ee.unlv.edu/~b1morris/ecg782/
Image preprocessing in spatial domain
 Image preprocessing in spatial domain Sharpening, image derivatives, Laplacian, edges Revision: 1.2, dated: May 25, 2007 Tomáš Svoboda Czech Technical University, Faculty of Electrical Engineering Center
Image preprocessing in spatial domain Sharpening, image derivatives, Laplacian, edges Revision: 1.2, dated: May 25, 2007 Tomáš Svoboda Czech Technical University, Faculty of Electrical Engineering Center
Roadmap. Introduction to image analysis (computer vision) Theory of edge detection. Applications
 Theory of edge detection. Applications") Edge Detection Roadmap Introduction to image analysis (computer vision) Its connection with psychology and neuroscience Why is image analysis difficult? Theory of edge detection Gradient operator Advanced
Edge Detection Roadmap Introduction to image analysis (computer vision) Its connection with psychology and neuroscience Why is image analysis difficult? Theory of edge detection Gradient operator Advanced
Lecture 4 Filtering in the Frequency Domain. Lin ZHANG, PhD School of Software Engineering Tongji University Spring 2016
 Lecture 4 Filtering in the Frequency Domain Lin ZHANG, PhD School of Software Engineering Tongji University Spring 2016 Outline Background From Fourier series to Fourier transform Properties of the Fourier
Lecture 4 Filtering in the Frequency Domain Lin ZHANG, PhD School of Software Engineering Tongji University Spring 2016 Outline Background From Fourier series to Fourier transform Properties of the Fourier
Digital Signal Processing Lecture 4
 Remote Sensing Laboratory Dept. of Information Engineering and Computer Science University of Trento Via Sommarive, 14, I-38123 Povo, Trento, Italy Digital Signal Processing Lecture 4 Begüm Demir E-mail:
Remote Sensing Laboratory Dept. of Information Engineering and Computer Science University of Trento Via Sommarive, 14, I-38123 Povo, Trento, Italy Digital Signal Processing Lecture 4 Begüm Demir E-mail:
DISCRETE-TIME SIGNAL PROCESSING
 THIRD EDITION DISCRETE-TIME SIGNAL PROCESSING ALAN V. OPPENHEIM MASSACHUSETTS INSTITUTE OF TECHNOLOGY RONALD W. SCHÄFER HEWLETT-PACKARD LABORATORIES Upper Saddle River Boston Columbus San Francisco New
THIRD EDITION DISCRETE-TIME SIGNAL PROCESSING ALAN V. OPPENHEIM MASSACHUSETTS INSTITUTE OF TECHNOLOGY RONALD W. SCHÄFER HEWLETT-PACKARD LABORATORIES Upper Saddle River Boston Columbus San Francisco New
Chap 2. Discrete-Time Signals and Systems
 Digital Signal Processing Chap 2. Discrete-Time Signals and Systems Chang-Su Kim Discrete-Time Signals CT Signal DT Signal Representation 0 4 1 1 1 2 3 Functional representation 1, n 1,3 x[ n] 4, n 2 0,
Digital Signal Processing Chap 2. Discrete-Time Signals and Systems Chang-Su Kim Discrete-Time Signals CT Signal DT Signal Representation 0 4 1 1 1 2 3 Functional representation 1, n 1,3 x[ n] 4, n 2 0,
Computer Vision Lecture 3
 Computer Vision Lecture 3 Linear Filters 03.11.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Demo Haribo Classification Code available on the class website...
Computer Vision Lecture 3 Linear Filters 03.11.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Demo Haribo Classification Code available on the class website...
LAB 6: FIR Filter Design Summer 2011
 University of Illinois at Urbana-Champaign Department of Electrical and Computer Engineering ECE 311: Digital Signal Processing Lab Chandra Radhakrishnan Peter Kairouz LAB 6: FIR Filter Design Summer 011
University of Illinois at Urbana-Champaign Department of Electrical and Computer Engineering ECE 311: Digital Signal Processing Lab Chandra Radhakrishnan Peter Kairouz LAB 6: FIR Filter Design Summer 011
Digital Image Processing. Chapter 4: Image Enhancement in the Frequency Domain
 Digital Image Processing Chapter 4: Image Enhancement in the Frequency Domain Image Enhancement in Frequency Domain Objective: To understand the Fourier Transform and frequency domain and how to apply
Digital Image Processing Chapter 4: Image Enhancement in the Frequency Domain Image Enhancement in Frequency Domain Objective: To understand the Fourier Transform and frequency domain and how to apply
! Introduction. ! Discrete Time Signals & Systems. ! Z-Transform. ! Inverse Z-Transform. ! Sampling of Continuous Time Signals
 ESE 531: Digital Signal Processing Lec 25: April 24, 2018 Review Course Content! Introduction! Discrete Time Signals & Systems! Discrete Time Fourier Transform! Z-Transform! Inverse Z-Transform! Sampling
ESE 531: Digital Signal Processing Lec 25: April 24, 2018 Review Course Content! Introduction! Discrete Time Signals & Systems! Discrete Time Fourier Transform! Z-Transform! Inverse Z-Transform! Sampling
Filtering in Frequency Domain
 Dr. Praveen Sankaran Department of ECE NIT Calicut February 4, 2013 Outline 1 2D DFT - Review 2 2D Sampling 2D DFT - Review 2D Impulse Train s [t, z] = m= n= δ [t m T, z n Z] (1) f (t, z) s [t, z] sampled
Dr. Praveen Sankaran Department of ECE NIT Calicut February 4, 2013 Outline 1 2D DFT - Review 2 2D Sampling 2D DFT - Review 2D Impulse Train s [t, z] = m= n= δ [t m T, z n Z] (1) f (t, z) s [t, z] sampled
On the Frequency-Domain Properties of Savitzky-Golay Filters
 On the Frequency-Domain Properties of Savitzky-Golay Filters Ronald W Schafer HP Laboratories HPL-2-9 Keyword(s): Savitzky-Golay filter, least-squares polynomial approximation, smoothing Abstract: This
On the Frequency-Domain Properties of Savitzky-Golay Filters Ronald W Schafer HP Laboratories HPL-2-9 Keyword(s): Savitzky-Golay filter, least-squares polynomial approximation, smoothing Abstract: This
Edge Detection. Introduction to Computer Vision. Useful Mathematics Funcs. The bad news
 Edge Detection Introduction to Computer Vision CS / ECE 8B Thursday, April, 004 Edge detection (HO #5) Edge detection is a local area operator that seeks to find significant, meaningful changes in image
Edge Detection Introduction to Computer Vision CS / ECE 8B Thursday, April, 004 Edge detection (HO #5) Edge detection is a local area operator that seeks to find significant, meaningful changes in image
Computer Engineering 4TL4: Digital Signal Processing
 Computer Engineering 4TL4: Digital Signal Processing Day Class Instructor: Dr. I. C. BRUCE Duration of Examination: 3 Hours McMaster University Final Examination December, 2003 This examination paper includes
Computer Engineering 4TL4: Digital Signal Processing Day Class Instructor: Dr. I. C. BRUCE Duration of Examination: 3 Hours McMaster University Final Examination December, 2003 This examination paper includes
Image enhancement. Why image enhancement? Why image enhancement? Why image enhancement? Example of artifacts caused by image encoding
 13 Why image enhancement? Image enhancement Example of artifacts caused by image encoding Computer Vision, Lecture 14 Michael Felsberg Computer Vision Laboratory Department of Electrical Engineering 12
13 Why image enhancement? Image enhancement Example of artifacts caused by image encoding Computer Vision, Lecture 14 Michael Felsberg Computer Vision Laboratory Department of Electrical Engineering 12
Review of Fundamentals of Digital Signal Processing
 Solution Manual for Theory and Applications of Digital Speech Processing by Lawrence Rabiner and Ronald Schafer Click here to Purchase full Solution Manual at http://solutionmanuals.info Link download
Solution Manual for Theory and Applications of Digital Speech Processing by Lawrence Rabiner and Ronald Schafer Click here to Purchase full Solution Manual at http://solutionmanuals.info Link download
Templates, Image Pyramids, and Filter Banks
 Templates, Image Pyramids, and Filter Banks 09/9/ Computer Vision James Hays, Brown Slides: Hoiem and others Review. Match the spatial domain image to the Fourier magnitude image 2 3 4 5 B A C D E Slide:
Templates, Image Pyramids, and Filter Banks 09/9/ Computer Vision James Hays, Brown Slides: Hoiem and others Review. Match the spatial domain image to the Fourier magnitude image 2 3 4 5 B A C D E Slide:
University Question Paper Solution
 Unit 1: Introduction University Question Paper Solution 1. Determine whether the following systems are: i) Memoryless, ii) Stable iii) Causal iv) Linear and v) Time-invariant. i) y(n)= nx(n) ii) y(t)=
Unit 1: Introduction University Question Paper Solution 1. Determine whether the following systems are: i) Memoryless, ii) Stable iii) Causal iv) Linear and v) Time-invariant. i) y(n)= nx(n) ii) y(t)=
Edge Detection. CS 650: Computer Vision
 CS 650: Computer Vision Edges and Gradients Edge: local indication of an object transition Edge detection: local operators that find edges (usually involves convolution) Local intensity transitions are
CS 650: Computer Vision Edges and Gradients Edge: local indication of an object transition Edge detection: local operators that find edges (usually involves convolution) Local intensity transitions are
VU Signal and Image Processing
 052600 VU Signal and Image Processing Torsten Möller + Hrvoje Bogunović + Raphael Sahann torsten.moeller@univie.ac.at hrvoje.bogunovic@meduniwien.ac.at raphael.sahann@univie.ac.at vda.cs.univie.ac.at/teaching/sip/18s/
052600 VU Signal and Image Processing Torsten Möller + Hrvoje Bogunović + Raphael Sahann torsten.moeller@univie.ac.at hrvoje.bogunovic@meduniwien.ac.at raphael.sahann@univie.ac.at vda.cs.univie.ac.at/teaching/sip/18s/
EECS490: Digital Image Processing. Lecture #11
 Lecture #11 Filtering Applications: OCR, scanning Highpass filters Laplacian in the frequency domain Image enhancement using highpass filters Homomorphic filters Bandreject/bandpass/notch filters Correlation
Lecture #11 Filtering Applications: OCR, scanning Highpass filters Laplacian in the frequency domain Image enhancement using highpass filters Homomorphic filters Bandreject/bandpass/notch filters Correlation
 UNIT III IMAGE RESTORATION Part A Questions 1. What is meant by Image Restoration? Restoration attempts to reconstruct or recover an image that has been degraded by using a clear knowledge of the degrading
UNIT III IMAGE RESTORATION Part A Questions 1. What is meant by Image Restoration? Restoration attempts to reconstruct or recover an image that has been degraded by using a clear knowledge of the degrading
Fourier Series Representation of
 Fourier Series Representation of Periodic Signals Rui Wang, Assistant professor Dept. of Information and Communication Tongji University it Email: ruiwang@tongji.edu.cn Outline The response of LIT system
Fourier Series Representation of Periodic Signals Rui Wang, Assistant professor Dept. of Information and Communication Tongji University it Email: ruiwang@tongji.edu.cn Outline The response of LIT system
ESE 531: Digital Signal Processing
 ESE 531: Digital Signal Processing Lec 8: February 12th, 2019 Sampling and Reconstruction Lecture Outline! Review " Ideal sampling " Frequency response of sampled signal " Reconstruction " Anti-aliasing
ESE 531: Digital Signal Processing Lec 8: February 12th, 2019 Sampling and Reconstruction Lecture Outline! Review " Ideal sampling " Frequency response of sampled signal " Reconstruction " Anti-aliasing
IT DIGITAL SIGNAL PROCESSING (2013 regulation) UNIT-1 SIGNALS AND SYSTEMS PART-A
 UNIT-1 SIGNALS AND SYSTEMS PART-A") DEPARTMENT OF ELECTRONICS AND COMMUNICATION ENGINEERING IT6502 - DIGITAL SIGNAL PROCESSING (2013 regulation) UNIT-1 SIGNALS AND SYSTEMS PART-A 1. What is a continuous and discrete time signal? Continuous
DEPARTMENT OF ELECTRONICS AND COMMUNICATION ENGINEERING IT6502 - DIGITAL SIGNAL PROCESSING (2013 regulation) UNIT-1 SIGNALS AND SYSTEMS PART-A 1. What is a continuous and discrete time signal? Continuous
Lecture 19 IIR Filters
 Lecture 19 IIR Filters Fundamentals of Digital Signal Processing Spring, 2012 Wei-Ta Chu 2012/5/10 1 General IIR Difference Equation IIR system: infinite-impulse response system The most general class
Lecture 19 IIR Filters Fundamentals of Digital Signal Processing Spring, 2012 Wei-Ta Chu 2012/5/10 1 General IIR Difference Equation IIR system: infinite-impulse response system The most general class
Discrete Fourier Transform
 Discrete Fourier Transform DD2423 Image Analysis and Computer Vision Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 13, 2013 Mårten Björkman
Discrete Fourier Transform DD2423 Image Analysis and Computer Vision Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 13, 2013 Mårten Björkman
Responses of Digital Filters Chapter Intended Learning Outcomes:
 Responses of Digital Filters Chapter Intended Learning Outcomes: (i) Understanding the relationships between impulse response, frequency response, difference equation and transfer function in characterizing
Responses of Digital Filters Chapter Intended Learning Outcomes: (i) Understanding the relationships between impulse response, frequency response, difference equation and transfer function in characterizing
Edge Detection. Image Processing - Computer Vision
 Image Processing - Lesson 10 Edge Detection Image Processing - Computer Vision Low Level Edge detection masks Gradient Detectors Compass Detectors Second Derivative - Laplace detectors Edge Linking Image
Image Processing - Lesson 10 Edge Detection Image Processing - Computer Vision Low Level Edge detection masks Gradient Detectors Compass Detectors Second Derivative - Laplace detectors Edge Linking Image
Additional Pointers. Introduction to Computer Vision. Convolution. Area operations: Linear filtering
 Additional Pointers Introduction to Computer Vision CS / ECE 181B andout #4 : Available this afternoon Midterm: May 6, 2004 W #2 due tomorrow Ack: Prof. Matthew Turk for the lecture slides. See my ECE
Additional Pointers Introduction to Computer Vision CS / ECE 181B andout #4 : Available this afternoon Midterm: May 6, 2004 W #2 due tomorrow Ack: Prof. Matthew Turk for the lecture slides. See my ECE