Roadmap. Introduction to image analysis (computer vision) Theory of edge detection. Applications
|
|
|
- Jeffery Benson
- 5 years ago
- Views:
Transcription
1 Edge Detection
2 Roadmap Introduction to image analysis (computer vision) Its connection with psychology and neuroscience Why is image analysis difficult? Theory of edge detection Gradient operator Advanced operators Applications Road/sign detection in intelligent driving systems Pupil detection in iris recognition systems
3 Computer Vision: the Grand Challenge Teach a computer to see is nontrivial at all Unlike binary images, grayscale/color images acquired by the sensor are often easy to understand by human being but difficult for a machine or a robot There are lots of interesting problems in the field of computer vision (image analysis) Image segmentation, image understanding, face detection/recognition, object tracking 3
4 How does Human Vision System work? Top-down school I see a human body I expect to see a human face Bottom-up school pixels components (such as edges, lines etc.) I expect to see two eyes and a nose objects Two hypothesis and nobody knows the answer yet! 4

5 An Amazing Image Example Person A: I see an old man with a fancy earring and a strange hand Person B: I see two people on the street and a dog lying beside If you try really hard, you will be able to locate at least eight different faces from this image 5

6 Gestalt Theory (the Berlin School) Emergence: the dog is perceived as a whole, all at once 6
7 Reification 7
8 Multistability (or Multistable Perception) 8
9 Invariance 9

10 Application: Face Detection You are strongly encouraged to try the interactive demo out yourself
11 Edge Detection Gradient operator Advanced operators Why detect edge? Edges characterize object boundaries and are useful features for segmentation, registration and object identification in scenes. What is edge (to human vision system)? No rigorous definition exists Intuitively, edge corresponds to singularities in the image (i.e. where pixel value experiences abrupt change)
12 Edge detection Idea (continuous-space): Detect local gradient Digital image: use finite differences instead
13 Practical edge detectors Edges can have any orientation Typical edge detection scheme uses K= edge templates Some use K> 3
14 Gradient Operators Motivation: detect changes change in the pixel value large gradient image f(m,n) Gradient operator g m, n = f x + f y θ g = tan f y f x Thresholding g(m,n) edge map I(m,n) MATLAB function: > help edge I( m, n) g( m, n) th otherwise 4
15 Common Operators Gradient operator g( m, n) g ( m, n) g ( m, n) Examples:. Roberts operator g g 5
16 6 Common Operators (cont d). Prewitt operator 3. Sobel operator vertical horizontal
17 Edge detection filters 7




18 Examples horizontal edge vertical edge original image Prewitt operator (th=48) Sobel operator (th=48) 8
19 Sobel detector 9

20 Prewitt detector



21 Magnitude of Sobel at threshold = {45, 4, 3,,, 5}, g =[,87]
22 Effect of Thresholding Parameters small threshold large
23 3 Compass Operators ) }, ( max{ ), ( n m g m n g k k
")
24 Examples Compass operator (th=48) 4
25 (Laplacian operator) Zero-crossings mark edge location 5 Laplacian Operators Gradient operator: first-order derivative sensitive to abrupt change, but not slow change second-order derivative: y f x f f x f local extreme in f 4 8 Discrete Laplacian operator =>Isotropic (rotationally invariant) operator a= a=.5 a a a a a a a a a 4
26 -d illustration of nd derivative edge detector zero crossing f f f image Laplacian edge zero-crossing operator map x(m,n) g(m,n) I(m,n) 6

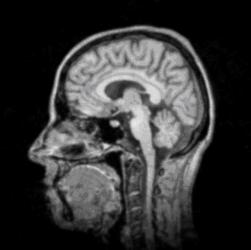
27 Examples original image zero-crossings Question: why is it so sensitive to noise (many false alarms)? Answer: a sign flip from. to -. is treated the same as from to - Sensitive to very fine detail and noise => blur image first Responds equally to strong and weak edges => suppress zero-crossings with low gradient magnitude 7
28 Ideas to Improve Robustness Linear filtering Use a Gaussian filter to smooth out noise component Laplacian of Gaussian Spatially-adaptive (Nonlinear) processing Apply different detection strategies to smooth areas (low-variance) and non-smooth areas (highvariance) Robust Laplacian edge detector Return single response to edges (not multiple edge pixels) Hysteresis thresholding Canny s edge detector 8
29 Laplacian of Gaussian Blurring of image with Gaussian and Laplacian operator can be combined into convolution with Laplacian of Gaussian (LoG) operator ( m n ) m n h( m, n) c[ ]exp( Gaussian Laplacian image edge LPF () operator map x(m,n) g(m,n) I(m,n) ) Pre-filtering: attenuate the noise sensitivity of the Laplacian 9

30 Laplacian of Gaussian Continuous function and discrete approximation σ = 3




31 Zero crossings of LoG at difference scale σ =.5 σ = 3 σ = 6 3

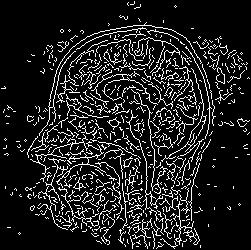
32 Examples Better than Laplacian alone but still sensitive due to zero crossing 3
33 Robust Laplacian-based Edge Detector estimate local variance image Laplacian operator zero crossing? No not an edge point >th No not an edge point yes edge point 33

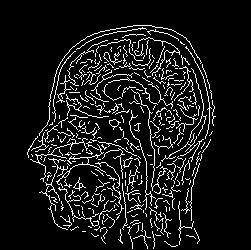
34 Examples More robust but return multiple edge pixels (poor localization) 34
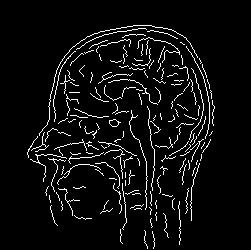
35 Canny Edge Detector Low error rate of detection Well match human perception results Good localization of edges The distance between actual edges in an image and the edges found by a computational algorithm should be minimized Single response The algorithm should not return multiple edges pixels when only a single one exists 35
36 Canny Edge Detector. Smooth image with a Gaussian filter. Compute gradient magnitude and angle (Sobel, Prewitt...) g x, y = f x + f y f, θ x, y = tan y f x 3. Apply nonmaxima suppression to gradient magnitude image 4. Double thresholding to detect strong and weak edge pixels 5. Reject weak edge pixels not connected with strong edge pixels 36
37 Flow-chart of Canny Edge Detector (J. Canny 986) Original image Smoothing by Gaussian convolution Differential operators along x and y axis Non-maximum suppression finds peaks in the image gradient Hysteresis thresholding locates edge strings Edge map 37
 is smaller than")


38 Canny nonmaxima suppression Quantize edge normal to one of four directions: If g(x,y) is smaller than either of its neighbors in edge normal direction suppress; else keep. Double-thresholding of gradient magnitude. Typical setting: θ high θ low =,3,4, Region labeling of edge pixels Reject regions without strong edge pixels 38






39 Canny Edge Detector Example original image vertical edges horizontal edges norm of the gradient after thresholding after thinning 39
40 Marr and Hildreth s Method* Edge is scale-dependent A different edge map can be generated at different scale Scale space representation f ( x, y; s) f ( x, y;) g( x, y; s) coarse-scale image fine-scale image Gaussian kernel with width of s g( x, y; s) s exp( x y s ) 4

41 Importance of Scale 4




42 Scale-Space Edge Detection Examples fine coarse 4

43 Marr/Hildreth and Canny Edge Detection 43

44 Marr/Hildreth and Canny Edge Detection 44
Edge Detection. CS 650: Computer Vision
 CS 650: Computer Vision Edges and Gradients Edge: local indication of an object transition Edge detection: local operators that find edges (usually involves convolution) Local intensity transitions are
CS 650: Computer Vision Edges and Gradients Edge: local indication of an object transition Edge detection: local operators that find edges (usually involves convolution) Local intensity transitions are
Edge Detection. Image Processing - Computer Vision
 Image Processing - Lesson 10 Edge Detection Image Processing - Computer Vision Low Level Edge detection masks Gradient Detectors Compass Detectors Second Derivative - Laplace detectors Edge Linking Image
Image Processing - Lesson 10 Edge Detection Image Processing - Computer Vision Low Level Edge detection masks Gradient Detectors Compass Detectors Second Derivative - Laplace detectors Edge Linking Image
Edge Detection. Introduction to Computer Vision. Useful Mathematics Funcs. The bad news
 Edge Detection Introduction to Computer Vision CS / ECE 8B Thursday, April, 004 Edge detection (HO #5) Edge detection is a local area operator that seeks to find significant, meaningful changes in image
Edge Detection Introduction to Computer Vision CS / ECE 8B Thursday, April, 004 Edge detection (HO #5) Edge detection is a local area operator that seeks to find significant, meaningful changes in image
Filtering and Edge Detection
 Filtering and Edge Detection Local Neighborhoods Hard to tell anything from a single pixel Example: you see a reddish pixel. Is this the object s color? Illumination? Noise? The next step in order of complexity
Filtering and Edge Detection Local Neighborhoods Hard to tell anything from a single pixel Example: you see a reddish pixel. Is this the object s color? Illumination? Noise? The next step in order of complexity
Lecture 7: Edge Detection
 #1 Lecture 7: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Definition of an Edge First Order Derivative Approximation as Edge Detector #2 This Lecture Examples of Edge Detection
#1 Lecture 7: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Definition of an Edge First Order Derivative Approximation as Edge Detector #2 This Lecture Examples of Edge Detection
Machine vision. Summary # 4. The mask for Laplacian is given
 1 Machine vision Summary # 4 The mask for Laplacian is given L = 0 1 0 1 4 1 (6) 0 1 0 Another Laplacian mask that gives more importance to the center element is L = 1 1 1 1 8 1 (7) 1 1 1 Note that the
1 Machine vision Summary # 4 The mask for Laplacian is given L = 0 1 0 1 4 1 (6) 0 1 0 Another Laplacian mask that gives more importance to the center element is L = 1 1 1 1 8 1 (7) 1 1 1 Note that the
Machine vision, spring 2018 Summary 4
 Machine vision Summary # 4 The mask for Laplacian is given L = 4 (6) Another Laplacian mask that gives more importance to the center element is given by L = 8 (7) Note that the sum of the elements in the
Machine vision Summary # 4 The mask for Laplacian is given L = 4 (6) Another Laplacian mask that gives more importance to the center element is given by L = 8 (7) Note that the sum of the elements in the
Laplacian Filters. Sobel Filters. Laplacian Filters. Laplacian Filters. Laplacian Filters. Laplacian Filters
 Sobel Filters Note that smoothing the image before applying a Sobel filter typically gives better results. Even thresholding the Sobel filtered image cannot usually create precise, i.e., -pixel wide, edges.
Sobel Filters Note that smoothing the image before applying a Sobel filter typically gives better results. Even thresholding the Sobel filtered image cannot usually create precise, i.e., -pixel wide, edges.
Lecture 6: Edge Detection. CAP 5415: Computer Vision Fall 2008
 Lecture 6: Edge Detection CAP 5415: Computer Vision Fall 2008 Announcements PS 2 is available Please read it by Thursday During Thursday lecture, I will be going over it in some detail Monday - Computer
Lecture 6: Edge Detection CAP 5415: Computer Vision Fall 2008 Announcements PS 2 is available Please read it by Thursday During Thursday lecture, I will be going over it in some detail Monday - Computer
Image Gradients and Gradient Filtering Computer Vision
 Image Gradients and Gradient Filtering 16-385 Computer Vision What is an image edge? Recall that an image is a 2D function f(x) edge edge How would you detect an edge? What kinds of filter would you use?
Image Gradients and Gradient Filtering 16-385 Computer Vision What is an image edge? Recall that an image is a 2D function f(x) edge edge How would you detect an edge? What kinds of filter would you use?
Basics on 2-D 2 D Random Signal
 Basics on -D D Random Signal Spring 06 Instructor: K. J. Ray Liu ECE Department, Univ. of Maryland, College Park Overview Last Time: Fourier Analysis for -D signals Image enhancement via spatial filtering
Basics on -D D Random Signal Spring 06 Instructor: K. J. Ray Liu ECE Department, Univ. of Maryland, College Park Overview Last Time: Fourier Analysis for -D signals Image enhancement via spatial filtering
Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems
 Robots for People --- A project for intelligent integrated systems") 1 Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems V. Estivill-Castro 2 Perception Concepts Vision Chapter 4 (textbook) Sections 4.3 to 4.5 What is the course
1 Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems V. Estivill-Castro 2 Perception Concepts Vision Chapter 4 (textbook) Sections 4.3 to 4.5 What is the course
Lecture 04 Image Filtering
 Institute of Informatics Institute of Neuroinformatics Lecture 04 Image Filtering Davide Scaramuzza 1 Lab Exercise 2 - Today afternoon Room ETH HG E 1.1 from 13:15 to 15:00 Work description: your first
Institute of Informatics Institute of Neuroinformatics Lecture 04 Image Filtering Davide Scaramuzza 1 Lab Exercise 2 - Today afternoon Room ETH HG E 1.1 from 13:15 to 15:00 Work description: your first
Local Enhancement. Local enhancement
 Local Enhancement Local Enhancement Median filtering (see notes/slides, 3.5.2) HW4 due next Wednesday Required Reading: Sections 3.3, 3.4, 3.5, 3.6, 3.7 Local Enhancement 1 Local enhancement Sometimes
Local Enhancement Local Enhancement Median filtering (see notes/slides, 3.5.2) HW4 due next Wednesday Required Reading: Sections 3.3, 3.4, 3.5, 3.6, 3.7 Local Enhancement 1 Local enhancement Sometimes
Local enhancement. Local Enhancement. Local histogram equalized. Histogram equalized. Local Contrast Enhancement. Fig 3.23: Another example
 Local enhancement Local Enhancement Median filtering Local Enhancement Sometimes Local Enhancement is Preferred. Malab: BlkProc operation for block processing. Left: original tire image. 0/07/00 Local
Local enhancement Local Enhancement Median filtering Local Enhancement Sometimes Local Enhancement is Preferred. Malab: BlkProc operation for block processing. Left: original tire image. 0/07/00 Local
Templates, Image Pyramids, and Filter Banks
 Templates, Image Pyramids, and Filter Banks 09/9/ Computer Vision James Hays, Brown Slides: Hoiem and others Review. Match the spatial domain image to the Fourier magnitude image 2 3 4 5 B A C D E Slide:
Templates, Image Pyramids, and Filter Banks 09/9/ Computer Vision James Hays, Brown Slides: Hoiem and others Review. Match the spatial domain image to the Fourier magnitude image 2 3 4 5 B A C D E Slide:
Problem Session #5. EE368/CS232 Digital Image Processing
 Problem Session #5 EE368/CS232 Digital Image Processing 1. Solving a Jigsaw Puzzle Please download the image hw5_puzzle_pieces.jpg from the handouts webpage, which shows the pieces of a jigsaw puzzle.
Problem Session #5 EE368/CS232 Digital Image Processing 1. Solving a Jigsaw Puzzle Please download the image hw5_puzzle_pieces.jpg from the handouts webpage, which shows the pieces of a jigsaw puzzle.
Reading. 3. Image processing. Pixel movement. Image processing Y R I G Q
 Reading Jain, Kasturi, Schunck, Machine Vision. McGraw-Hill, 1995. Sections 4.-4.4, 4.5(intro), 4.5.5, 4.5.6, 5.1-5.4. 3. Image processing 1 Image processing An image processing operation typically defines
Reading Jain, Kasturi, Schunck, Machine Vision. McGraw-Hill, 1995. Sections 4.-4.4, 4.5(intro), 4.5.5, 4.5.6, 5.1-5.4. 3. Image processing 1 Image processing An image processing operation typically defines
SURF Features. Jacky Baltes Dept. of Computer Science University of Manitoba WWW:
 SURF Features Jacky Baltes Dept. of Computer Science University of Manitoba Email: jacky@cs.umanitoba.ca WWW: http://www.cs.umanitoba.ca/~jacky Salient Spatial Features Trying to find interest points Points
SURF Features Jacky Baltes Dept. of Computer Science University of Manitoba Email: jacky@cs.umanitoba.ca WWW: http://www.cs.umanitoba.ca/~jacky Salient Spatial Features Trying to find interest points Points
CS4495/6495 Introduction to Computer Vision. 2A-L6 Edge detection: 2D operators
 CS4495/6495 Introduction to Computer Vision 2A-L6 Edge detection: 2D operators Derivative theorem of convolution - 1D This saves us one operation: ( ) ( ) x h f h f x f h h x h x ( ) f Derivative of Gaussian
CS4495/6495 Introduction to Computer Vision 2A-L6 Edge detection: 2D operators Derivative theorem of convolution - 1D This saves us one operation: ( ) ( ) x h f h f x f h h x h x ( ) f Derivative of Gaussian
Review Smoothing Spatial Filters Sharpening Spatial Filters. Spatial Filtering. Dr. Praveen Sankaran. Department of ECE NIT Calicut.
 Spatial Filtering Dr. Praveen Sankaran Department of ECE NIT Calicut January 7, 203 Outline 2 Linear Nonlinear 3 Spatial Domain Refers to the image plane itself. Direct manipulation of image pixels. Figure:
Spatial Filtering Dr. Praveen Sankaran Department of ECE NIT Calicut January 7, 203 Outline 2 Linear Nonlinear 3 Spatial Domain Refers to the image plane itself. Direct manipulation of image pixels. Figure:
Lecture 8: Interest Point Detection. Saad J Bedros
 #1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Review of Edge Detectors #2 Today s Lecture Interest Points Detection What do we mean with Interest Point Detection in an Image Goal:
#1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Review of Edge Detectors #2 Today s Lecture Interest Points Detection What do we mean with Interest Point Detection in an Image Goal:
ITK Filters. Thresholding Edge Detection Gradients Second Order Derivatives Neighborhood Filters Smoothing Filters Distance Map Image Transforms
 ITK Filters Thresholding Edge Detection Gradients Second Order Derivatives Neighborhood Filters Smoothing Filters Distance Map Image Transforms ITCS 6010:Biomedical Imaging and Visualization 1 ITK Filters:
ITK Filters Thresholding Edge Detection Gradients Second Order Derivatives Neighborhood Filters Smoothing Filters Distance Map Image Transforms ITCS 6010:Biomedical Imaging and Visualization 1 ITK Filters:
Edge Detection PSY 5018H: Math Models Hum Behavior, Prof. Paul Schrater, Spring 2005
 Edge Detection PSY 5018H: Math Models Hum Behavior, Prof. Paul Schrater, Spring 2005 Gradients and edges Points of sharp change in an image are interesting: change in reflectance change in object change
Edge Detection PSY 5018H: Math Models Hum Behavior, Prof. Paul Schrater, Spring 2005 Gradients and edges Points of sharp change in an image are interesting: change in reflectance change in object change
Edges and Scale. Image Features. Detecting edges. Origin of Edges. Solution: smooth first. Effects of noise
 Edges and Scale Image Features From Sandlot Science Slides revised from S. Seitz, R. Szeliski, S. Lazebnik, etc. Origin of Edges surface normal discontinuity depth discontinuity surface color discontinuity
Edges and Scale Image Features From Sandlot Science Slides revised from S. Seitz, R. Szeliski, S. Lazebnik, etc. Origin of Edges surface normal discontinuity depth discontinuity surface color discontinuity
Properties of detectors Edge detectors Harris DoG Properties of descriptors SIFT HOG Shape context
 Lecture 10 Detectors and descriptors Properties of detectors Edge detectors Harris DoG Properties of descriptors SIFT HOG Shape context Silvio Savarese Lecture 10-16-Feb-15 From the 3D to 2D & vice versa
Lecture 10 Detectors and descriptors Properties of detectors Edge detectors Harris DoG Properties of descriptors SIFT HOG Shape context Silvio Savarese Lecture 10-16-Feb-15 From the 3D to 2D & vice versa
Edge Detection. Computer Vision P. Schrater Spring 2003
 Edge Detection Computer Vision P. Schrater Spring 2003 Simplest Model: (Canny) Edge(x) = a U(x) + n(x) U(x)? x=0 Convolve image with U and find points with high magnitude. Choose value by comparing with
Edge Detection Computer Vision P. Schrater Spring 2003 Simplest Model: (Canny) Edge(x) = a U(x) + n(x) U(x)? x=0 Convolve image with U and find points with high magnitude. Choose value by comparing with
Advanced Edge Detection 1
 Advanced Edge Detection 1 Lecture 4 See Sections 2.4 and 1.2.5 in Reinhard Klette: Concise Computer Vision Springer-Verlag, London, 2014 1 See last slide for copyright information. 1 / 27 Agenda 1 LoG
Advanced Edge Detection 1 Lecture 4 See Sections 2.4 and 1.2.5 in Reinhard Klette: Concise Computer Vision Springer-Verlag, London, 2014 1 See last slide for copyright information. 1 / 27 Agenda 1 LoG
TRACKING and DETECTION in COMPUTER VISION Filtering and edge detection
 Technischen Universität München Winter Semester 0/0 TRACKING and DETECTION in COMPUTER VISION Filtering and edge detection Slobodan Ilić Overview Image formation Convolution Non-liner filtering: Median
Technischen Universität München Winter Semester 0/0 TRACKING and DETECTION in COMPUTER VISION Filtering and edge detection Slobodan Ilić Overview Image formation Convolution Non-liner filtering: Median
ECE Digital Image Processing and Introduction to Computer Vision. Outline
 2/9/7 ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 207. Recap Outline 2. Sharpening Filtering Illustration
2/9/7 ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 207. Recap Outline 2. Sharpening Filtering Illustration
Computer Vision Lecture 3
 Computer Vision Lecture 3 Linear Filters 03.11.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Demo Haribo Classification Code available on the class website...
Computer Vision Lecture 3 Linear Filters 03.11.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Demo Haribo Classification Code available on the class website...
Advanced Features. Advanced Features: Topics. Jana Kosecka. Slides from: S. Thurn, D. Lowe, Forsyth and Ponce. Advanced features and feature matching
 Advanced Features Jana Kosecka Slides from: S. Thurn, D. Lowe, Forsyth and Ponce Advanced Features: Topics Advanced features and feature matching Template matching SIFT features Haar features 2 1 Features
Advanced Features Jana Kosecka Slides from: S. Thurn, D. Lowe, Forsyth and Ponce Advanced Features: Topics Advanced features and feature matching Template matching SIFT features Haar features 2 1 Features
Lecture 8: Interest Point Detection. Saad J Bedros
 #1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Last Lecture : Edge Detection Preprocessing of image is desired to eliminate or at least minimize noise effects There is always tradeoff
#1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Last Lecture : Edge Detection Preprocessing of image is desired to eliminate or at least minimize noise effects There is always tradeoff
Detection of signal transitions by order statistics filtering
 Detection of signal transitions by order statistics filtering A. Raji Images, Signals and Intelligent Systems Laboratory Paris-Est Creteil University, France Abstract In this article, we present a non
Detection of signal transitions by order statistics filtering A. Raji Images, Signals and Intelligent Systems Laboratory Paris-Est Creteil University, France Abstract In this article, we present a non
Outline. Convolution. Filtering
 Filtering Outline Convolution Filtering Logistics HW1 HW2 - out tomorrow Recall: what is a digital (grayscale) image? Matrix of integer values Images as height fields Let s think of image as zero-padded
Filtering Outline Convolution Filtering Logistics HW1 HW2 - out tomorrow Recall: what is a digital (grayscale) image? Matrix of integer values Images as height fields Let s think of image as zero-padded
Slide a window along the input arc sequence S. Least-squares estimate. σ 2. σ Estimate 1. Statistically test the difference between θ 1 and θ 2
 Corner Detection 2D Image Features Corners are important two dimensional features. Two dimensional image features are interesting local structures. They include junctions of dierent types Slide 3 They
Corner Detection 2D Image Features Corners are important two dimensional features. Two dimensional image features are interesting local structures. They include junctions of dierent types Slide 3 They
Corner. Corners are the intersections of two edges of sufficiently different orientations.
 2D Image Features Two dimensional image features are interesting local structures. They include junctions of different types like Y, T, X, and L. Much of the work on 2D features focuses on junction L,
2D Image Features Two dimensional image features are interesting local structures. They include junctions of different types like Y, T, X, and L. Much of the work on 2D features focuses on junction L,
Image Filtering, Edges and Image Representation
 Image Filtering, Edges and Image Representation Capturing what s important Req reading: Chapter 7, 9 F&P Adelson, Simoncelli and Freeman (handout online) Opt reading: Horn 7 & 8 FP 8 February 19, 8 A nice
Image Filtering, Edges and Image Representation Capturing what s important Req reading: Chapter 7, 9 F&P Adelson, Simoncelli and Freeman (handout online) Opt reading: Horn 7 & 8 FP 8 February 19, 8 A nice
Additional Pointers. Introduction to Computer Vision. Convolution. Area operations: Linear filtering
 Additional Pointers Introduction to Computer Vision CS / ECE 181B andout #4 : Available this afternoon Midterm: May 6, 2004 W #2 due tomorrow Ack: Prof. Matthew Turk for the lecture slides. See my ECE
Additional Pointers Introduction to Computer Vision CS / ECE 181B andout #4 : Available this afternoon Midterm: May 6, 2004 W #2 due tomorrow Ack: Prof. Matthew Turk for the lecture slides. See my ECE
Feature extraction: Corners and blobs
 Feature extraction: Corners and blobs Review: Linear filtering and edge detection Name two different kinds of image noise Name a non-linear smoothing filter What advantages does median filtering have over
Feature extraction: Corners and blobs Review: Linear filtering and edge detection Name two different kinds of image noise Name a non-linear smoothing filter What advantages does median filtering have over
CSE 473/573 Computer Vision and Image Processing (CVIP)
") CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Lecture 11 Local Features 1 Schedule Last class We started local features Today More on local features Readings for
CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Lecture 11 Local Features 1 Schedule Last class We started local features Today More on local features Readings for
Introduction to Computer Vision. 2D Linear Systems
 Introduction to Computer Vision D Linear Systems Review: Linear Systems We define a system as a unit that converts an input function into an output function Independent variable System operator or Transfer
Introduction to Computer Vision D Linear Systems Review: Linear Systems We define a system as a unit that converts an input function into an output function Independent variable System operator or Transfer
Overview. Harris interest points. Comparing interest points (SSD, ZNCC, SIFT) Scale & affine invariant interest points
 Scale & affine invariant interest points") Overview Harris interest points Comparing interest points (SSD, ZNCC, SIFT) Scale & affine invariant interest points Evaluation and comparison of different detectors Region descriptors and their performance
Overview Harris interest points Comparing interest points (SSD, ZNCC, SIFT) Scale & affine invariant interest points Evaluation and comparison of different detectors Region descriptors and their performance
ECE Digital Image Processing and Introduction to Computer Vision
 ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 2017 Outline Recap, image degradation / restoration Template
ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 2017 Outline Recap, image degradation / restoration Template
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil nfrastructure Eng. & Mgmt. Session 9- mage Detectors, Part Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering Lab e-mail:
CEE598 - Visual Sensing for Civil nfrastructure Eng. & Mgmt. Session 9- mage Detectors, Part Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering Lab e-mail:
CS 231A Section 1: Linear Algebra & Probability Review
 CS 231A Section 1: Linear Algebra & Probability Review 1 Topics Support Vector Machines Boosting Viola-Jones face detector Linear Algebra Review Notation Operations & Properties Matrix Calculus Probability
CS 231A Section 1: Linear Algebra & Probability Review 1 Topics Support Vector Machines Boosting Viola-Jones face detector Linear Algebra Review Notation Operations & Properties Matrix Calculus Probability
Image Filtering. Slides, adapted from. Steve Seitz and Rick Szeliski, U.Washington
 Image Filtering Slides, adapted from Steve Seitz and Rick Szeliski, U.Washington The power of blur All is Vanity by Charles Allen Gillbert (1873-1929) Harmon LD & JuleszB (1973) The recognition of faces.
Image Filtering Slides, adapted from Steve Seitz and Rick Szeliski, U.Washington The power of blur All is Vanity by Charles Allen Gillbert (1873-1929) Harmon LD & JuleszB (1973) The recognition of faces.
CS 231A Section 1: Linear Algebra & Probability Review. Kevin Tang
 CS 231A Section 1: Linear Algebra & Probability Review Kevin Tang Kevin Tang Section 1-1 9/30/2011 Topics Support Vector Machines Boosting Viola Jones face detector Linear Algebra Review Notation Operations
CS 231A Section 1: Linear Algebra & Probability Review Kevin Tang Kevin Tang Section 1-1 9/30/2011 Topics Support Vector Machines Boosting Viola Jones face detector Linear Algebra Review Notation Operations
Recap: edge detection. Source: D. Lowe, L. Fei-Fei
 Recap: edge detection Source: D. Lowe, L. Fei-Fei Canny edge detector 1. Filter image with x, y derivatives of Gaussian 2. Find magnitude and orientation of gradient 3. Non-maximum suppression: Thin multi-pixel
Recap: edge detection Source: D. Lowe, L. Fei-Fei Canny edge detector 1. Filter image with x, y derivatives of Gaussian 2. Find magnitude and orientation of gradient 3. Non-maximum suppression: Thin multi-pixel
Feature Extraction and Image Processing
 Feature Extraction and Image Processing Second edition Mark S. Nixon Alberto S. Aguado :*авш JBK IIP AMSTERDAM BOSTON HEIDELBERG LONDON NEW YORK OXFORD PARIS SAN DIEGO SAN FRANCISCO SINGAPORE SYDNEY TOKYO
Feature Extraction and Image Processing Second edition Mark S. Nixon Alberto S. Aguado :*авш JBK IIP AMSTERDAM BOSTON HEIDELBERG LONDON NEW YORK OXFORD PARIS SAN DIEGO SAN FRANCISCO SINGAPORE SYDNEY TOKYO
Computer Vision & Digital Image Processing
 Computer Vision & Digital Image Processing Image Segmentation Dr. D. J. Jackson Lecture 6- Image segmentation Segmentation divides an image into its constituent parts or objects Level of subdivision depends
Computer Vision & Digital Image Processing Image Segmentation Dr. D. J. Jackson Lecture 6- Image segmentation Segmentation divides an image into its constituent parts or objects Level of subdivision depends
Overview. Introduction to local features. Harris interest points + SSD, ZNCC, SIFT. Evaluation and comparison of different detectors
 Overview Introduction to local features Harris interest points + SSD, ZNCC, SIFT Scale & affine invariant interest point detectors Evaluation and comparison of different detectors Region descriptors and
Overview Introduction to local features Harris interest points + SSD, ZNCC, SIFT Scale & affine invariant interest point detectors Evaluation and comparison of different detectors Region descriptors and
CITS 4402 Computer Vision
 CITS 4402 Computer Vision A/Prof Ajmal Mian Adj/A/Prof Mehdi Ravanbakhsh Lecture 06 Object Recognition Objectives To understand the concept of image based object recognition To learn how to match images
CITS 4402 Computer Vision A/Prof Ajmal Mian Adj/A/Prof Mehdi Ravanbakhsh Lecture 06 Object Recognition Objectives To understand the concept of image based object recognition To learn how to match images
CS 188: Artificial Intelligence Spring Announcements
 CS 188: Artificial Intelligence Spring 2010 Lecture 22: Nearest Neighbors, Kernels 4/18/2011 Pieter Abbeel UC Berkeley Slides adapted from Dan Klein Announcements On-going: contest (optional and FUN!)
CS 188: Artificial Intelligence Spring 2010 Lecture 22: Nearest Neighbors, Kernels 4/18/2011 Pieter Abbeel UC Berkeley Slides adapted from Dan Klein Announcements On-going: contest (optional and FUN!)
Image Segmentation: Definition Importance. Digital Image Processing, 2nd ed. Chapter 10 Image Segmentation.
 : Definition Importance Detection of Discontinuities: 9 R = wi z i= 1 i Point Detection: 1. A Mask 2. Thresholding R T Line Detection: A Suitable Mask in desired direction Thresholding Line i : R R, j
: Definition Importance Detection of Discontinuities: 9 R = wi z i= 1 i Point Detection: 1. A Mask 2. Thresholding R T Line Detection: A Suitable Mask in desired direction Thresholding Line i : R R, j
Generalized Laplacian as Focus Measure
 Generalized Laplacian as Focus Measure Muhammad Riaz 1, Seungjin Park, Muhammad Bilal Ahmad 1, Waqas Rasheed 1, and Jongan Park 1 1 School of Information & Communications Engineering, Chosun University,
Generalized Laplacian as Focus Measure Muhammad Riaz 1, Seungjin Park, Muhammad Bilal Ahmad 1, Waqas Rasheed 1, and Jongan Park 1 1 School of Information & Communications Engineering, Chosun University,
Atmospheric Turbulence Effects Removal on Infrared Sequences Degraded by Local Isoplanatism
 Atmospheric Turbulence Effects Removal on Infrared Sequences Degraded by Local Isoplanatism Magali Lemaitre 1, Olivier Laligant 1, Jacques Blanc-Talon 2, and Fabrice Mériaudeau 1 1 Le2i Laboratory, University
Atmospheric Turbulence Effects Removal on Infrared Sequences Degraded by Local Isoplanatism Magali Lemaitre 1, Olivier Laligant 1, Jacques Blanc-Talon 2, and Fabrice Mériaudeau 1 1 Le2i Laboratory, University
Taking derivative by convolution
 Taking derivative by convolution Partial derivatives with convolution For 2D function f(x,y), the partial derivative is: For discrete data, we can approximate using finite differences: To implement above
Taking derivative by convolution Partial derivatives with convolution For 2D function f(x,y), the partial derivative is: For discrete data, we can approximate using finite differences: To implement above
Image Analysis. Feature extraction: corners and blobs
 Image Analysis Feature extraction: corners and blobs Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Svetlana Lazebnik, University of North Carolina at Chapel Hill (http://www.cs.unc.edu/~lazebnik/spring10/).
Image Analysis Feature extraction: corners and blobs Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Svetlana Lazebnik, University of North Carolina at Chapel Hill (http://www.cs.unc.edu/~lazebnik/spring10/).
Introduction to Boosting and Joint Boosting
 Introduction to Boosting and Learning Systems Group, Caltech 2005/04/26, Presentation in EE150 Boosting and Outline Introduction to Boosting 1 Introduction to Boosting Intuition of Boosting Adaptive Boosting
Introduction to Boosting and Learning Systems Group, Caltech 2005/04/26, Presentation in EE150 Boosting and Outline Introduction to Boosting 1 Introduction to Boosting Intuition of Boosting Adaptive Boosting
CS 188: Artificial Intelligence Spring Announcements
 CS 188: Artificial Intelligence Spring 2010 Lecture 24: Perceptrons and More! 4/22/2010 Pieter Abbeel UC Berkeley Slides adapted from Dan Klein Announcements W7 due tonight [this is your last written for
CS 188: Artificial Intelligence Spring 2010 Lecture 24: Perceptrons and More! 4/22/2010 Pieter Abbeel UC Berkeley Slides adapted from Dan Klein Announcements W7 due tonight [this is your last written for
Announcements. CS 188: Artificial Intelligence Spring Classification. Today. Classification overview. Case-Based Reasoning
 CS 188: Artificial Intelligence Spring 21 Lecture 22: Nearest Neighbors, Kernels 4/18/211 Pieter Abbeel UC Berkeley Slides adapted from Dan Klein Announcements On-going: contest (optional and FUN!) Remaining
CS 188: Artificial Intelligence Spring 21 Lecture 22: Nearest Neighbors, Kernels 4/18/211 Pieter Abbeel UC Berkeley Slides adapted from Dan Klein Announcements On-going: contest (optional and FUN!) Remaining
Linear Diffusion. E9 242 STIP- R. Venkatesh Babu IISc
 Linear Diffusion Derivation of Heat equation Consider a 2D hot plate with Initial temperature profile I 0 (x, y) Uniform (isotropic) conduction coefficient c Unit thickness (along z) Problem: What is temperature
Linear Diffusion Derivation of Heat equation Consider a 2D hot plate with Initial temperature profile I 0 (x, y) Uniform (isotropic) conduction coefficient c Unit thickness (along z) Problem: What is temperature
Detectors part II Descriptors
 EECS 442 Computer vision Detectors part II Descriptors Blob detectors Invariance Descriptors Some slides of this lectures are courtesy of prof F. Li, prof S. Lazebnik, and various other lecturers Goal:
EECS 442 Computer vision Detectors part II Descriptors Blob detectors Invariance Descriptors Some slides of this lectures are courtesy of prof F. Li, prof S. Lazebnik, and various other lecturers Goal:
Orientation Map Based Palmprint Recognition
 Orientation Map Based Palmprint Recognition (BM) 45 Orientation Map Based Palmprint Recognition B. H. Shekar, N. Harivinod bhshekar@gmail.com, harivinodn@gmail.com India, Mangalore University, Department
Orientation Map Based Palmprint Recognition (BM) 45 Orientation Map Based Palmprint Recognition B. H. Shekar, N. Harivinod bhshekar@gmail.com, harivinodn@gmail.com India, Mangalore University, Department
CAP 5415 Computer Vision Fall 2011
 CAP 545 Computer Vision Fall 2 Dr. Mubarak Sa Univ. o Central Florida www.cs.uc.edu/~vision/courses/cap545/all22 Oice 247-F HEC Filtering Lecture-2 General Binary Gray Scale Color Binary Images Y Row X
CAP 545 Computer Vision Fall 2 Dr. Mubarak Sa Univ. o Central Florida www.cs.uc.edu/~vision/courses/cap545/all22 Oice 247-F HEC Filtering Lecture-2 General Binary Gray Scale Color Binary Images Y Row X
Biometrics: Introduction and Examples. Raymond Veldhuis
 Biometrics: Introduction and Examples Raymond Veldhuis 1 Overview Biometric recognition Face recognition Challenges Transparent face recognition Large-scale identification Watch list Anonymous biometrics
Biometrics: Introduction and Examples Raymond Veldhuis 1 Overview Biometric recognition Face recognition Challenges Transparent face recognition Large-scale identification Watch list Anonymous biometrics
Blobs & Scale Invariance
 Blobs & Scale Invariance Prof. Didier Stricker Doz. Gabriele Bleser Computer Vision: Object and People Tracking With slides from Bebis, S. Lazebnik & S. Seitz, D. Lowe, A. Efros 1 Apertizer: some videos
Blobs & Scale Invariance Prof. Didier Stricker Doz. Gabriele Bleser Computer Vision: Object and People Tracking With slides from Bebis, S. Lazebnik & S. Seitz, D. Lowe, A. Efros 1 Apertizer: some videos
SIFT: SCALE INVARIANT FEATURE TRANSFORM BY DAVID LOWE
 SIFT: SCALE INVARIANT FEATURE TRANSFORM BY DAVID LOWE Overview Motivation of Work Overview of Algorithm Scale Space and Difference of Gaussian Keypoint Localization Orientation Assignment Descriptor Building
SIFT: SCALE INVARIANT FEATURE TRANSFORM BY DAVID LOWE Overview Motivation of Work Overview of Algorithm Scale Space and Difference of Gaussian Keypoint Localization Orientation Assignment Descriptor Building
Scale-space image processing
 Scale-space image processing Corresponding image features can appear at different scales Like shift-invariance, scale-invariance of image processing algorithms is often desirable. Scale-space representation
Scale-space image processing Corresponding image features can appear at different scales Like shift-invariance, scale-invariance of image processing algorithms is often desirable. Scale-space representation
CAP 5415 Computer Vision
 CAP 545 Computer Vision Dr. Mubarak Sa Univ. o Central Florida Filtering Lecture-2 Contents Filtering/Smooting/Removing Noise Convolution/Correlation Image Derivatives Histogram Some Matlab Functions General
CAP 545 Computer Vision Dr. Mubarak Sa Univ. o Central Florida Filtering Lecture-2 Contents Filtering/Smooting/Removing Noise Convolution/Correlation Image Derivatives Histogram Some Matlab Functions General
Linear Operators and Fourier Transform
 Linear Operators and Fourier Transform DD2423 Image Analysis and Computer Vision Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 13, 2013
Linear Operators and Fourier Transform DD2423 Image Analysis and Computer Vision Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 13, 2013
SIFT: Scale Invariant Feature Transform
 1 SIFT: Scale Invariant Feature Transform With slides from Sebastian Thrun Stanford CS223B Computer Vision, Winter 2006 3 Pattern Recognition Want to find in here SIFT Invariances: Scaling Rotation Illumination
1 SIFT: Scale Invariant Feature Transform With slides from Sebastian Thrun Stanford CS223B Computer Vision, Winter 2006 3 Pattern Recognition Want to find in here SIFT Invariances: Scaling Rotation Illumination
Lecture 8: Signal Detection and Noise Assumption
 ECE 830 Fall 0 Statistical Signal Processing instructor: R. Nowak Lecture 8: Signal Detection and Noise Assumption Signal Detection : X = W H : X = S + W where W N(0, σ I n n and S = [s, s,..., s n ] T
ECE 830 Fall 0 Statistical Signal Processing instructor: R. Nowak Lecture 8: Signal Detection and Noise Assumption Signal Detection : X = W H : X = S + W where W N(0, σ I n n and S = [s, s,..., s n ] T
A Contrario Detection of False Matches in Iris Recognition
 A Contrario Detection of False Matches in Iris Recognition Marcelo Mottalli, Mariano Tepper, and Marta Mejail Departamento de Computación, Universidad de Buenos Aires, Argentina Abstract. The pattern of
A Contrario Detection of False Matches in Iris Recognition Marcelo Mottalli, Mariano Tepper, and Marta Mejail Departamento de Computación, Universidad de Buenos Aires, Argentina Abstract. The pattern of
Scale & Affine Invariant Interest Point Detectors
 Scale & Affine Invariant Interest Point Detectors Krystian Mikolajczyk and Cordelia Schmid Presented by Hunter Brown & Gaurav Pandey, February 19, 2009 Roadmap: Motivation Scale Invariant Detector Affine
Scale & Affine Invariant Interest Point Detectors Krystian Mikolajczyk and Cordelia Schmid Presented by Hunter Brown & Gaurav Pandey, February 19, 2009 Roadmap: Motivation Scale Invariant Detector Affine
CS 179: LECTURE 16 MODEL COMPLEXITY, REGULARIZATION, AND CONVOLUTIONAL NETS
 CS 179: LECTURE 16 MODEL COMPLEXITY, REGULARIZATION, AND CONVOLUTIONAL NETS LAST TIME Intro to cudnn Deep neural nets using cublas and cudnn TODAY Building a better model for image classification Overfitting
CS 179: LECTURE 16 MODEL COMPLEXITY, REGULARIZATION, AND CONVOLUTIONAL NETS LAST TIME Intro to cudnn Deep neural nets using cublas and cudnn TODAY Building a better model for image classification Overfitting
Digital Image Processing. Lecture 6 (Enhancement) Bu-Ali Sina University Computer Engineering Dep. Fall 2009
 Bu-Ali Sina University Computer Engineering Dep. Fall 2009") Digital Image Processing Lecture 6 (Enhancement) Bu-Ali Sina University Computer Engineering Dep. Fall 009 Outline Image Enhancement in Spatial Domain Spatial Filtering Smoothing Filters Median Filter
Digital Image Processing Lecture 6 (Enhancement) Bu-Ali Sina University Computer Engineering Dep. Fall 009 Outline Image Enhancement in Spatial Domain Spatial Filtering Smoothing Filters Median Filter
Suppose we have a one-dimensional discrete signal f(x). The convolution of f with a kernel g is defined as h(x) = f(x)*g(x) = w 1. f(i)g(x i), (3.
. The convolution of f with a kernel g is defined as h(x) = f(x)*g(x) = w 1. f(i)g(x i), (3.") Chapter 3 Image filtering Filtering an image involves transforming the values of the pixels by taking into account the values of the neighboring pixels. Filtering is a basic concept of signal and image
Chapter 3 Image filtering Filtering an image involves transforming the values of the pixels by taking into account the values of the neighboring pixels. Filtering is a basic concept of signal and image
The Frequency Domain. Many slides borrowed from Steve Seitz
 The Frequency Domain Many slides borrowed from Steve Seitz Somewhere in Cinque Terre, May 2005 15-463: Computational Photography Alexei Efros, CMU, Spring 2010 Salvador Dali Gala Contemplating the Mediterranean
The Frequency Domain Many slides borrowed from Steve Seitz Somewhere in Cinque Terre, May 2005 15-463: Computational Photography Alexei Efros, CMU, Spring 2010 Salvador Dali Gala Contemplating the Mediterranean
Image Enhancement: Methods. Digital Image Processing. No Explicit definition. Spatial Domain: Frequency Domain:
 Image Enhancement: No Explicit definition Methods Spatial Domain: Linear Nonlinear Frequency Domain: Linear Nonlinear 1 Spatial Domain Process,, g x y T f x y 2 For 1 1 neighborhood: Contrast Enhancement/Stretching/Point
Image Enhancement: No Explicit definition Methods Spatial Domain: Linear Nonlinear Frequency Domain: Linear Nonlinear 1 Spatial Domain Process,, g x y T f x y 2 For 1 1 neighborhood: Contrast Enhancement/Stretching/Point
6.869 Advances in Computer Vision. Bill Freeman, Antonio Torralba and Phillip Isola MIT Oct. 3, 2018
 6.869 Advances in Computer Vision Bill Freeman, Antonio Torralba and Phillip Isola MIT Oct. 3, 2018 1 Sampling Sampling Pixels Continuous world 3 Sampling 4 Sampling 5 Continuous image f (x, y) Sampling
6.869 Advances in Computer Vision Bill Freeman, Antonio Torralba and Phillip Isola MIT Oct. 3, 2018 1 Sampling Sampling Pixels Continuous world 3 Sampling 4 Sampling 5 Continuous image f (x, y) Sampling
Scale & Affine Invariant Interest Point Detectors
 Scale & Affine Invariant Interest Point Detectors KRYSTIAN MIKOLAJCZYK AND CORDELIA SCHMID [2004] Shreyas Saxena Gurkirit Singh 23/11/2012 Introduction We are interested in finding interest points. What
Scale & Affine Invariant Interest Point Detectors KRYSTIAN MIKOLAJCZYK AND CORDELIA SCHMID [2004] Shreyas Saxena Gurkirit Singh 23/11/2012 Introduction We are interested in finding interest points. What
Total Variation Theory and Its Applications
 Total Variation Theory and Its Applications 2nd UCC Annual Research Conference, Kingston, Jamaica Peter Ndajah University of the Commonwealth Caribbean, Kingston, Jamaica September 27, 2018 Peter Ndajah
Total Variation Theory and Its Applications 2nd UCC Annual Research Conference, Kingston, Jamaica Peter Ndajah University of the Commonwealth Caribbean, Kingston, Jamaica September 27, 2018 Peter Ndajah
Corners, Blobs & Descriptors. With slides from S. Lazebnik & S. Seitz, D. Lowe, A. Efros
 Corners, Blobs & Descriptors With slides from S. Lazebnik & S. Seitz, D. Lowe, A. Efros Motivation: Build a Panorama M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 How do we build panorama?
Corners, Blobs & Descriptors With slides from S. Lazebnik & S. Seitz, D. Lowe, A. Efros Motivation: Build a Panorama M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 How do we build panorama?
INTEREST POINTS AT DIFFERENT SCALES
 INTEREST POINTS AT DIFFERENT SCALES Thank you for the slides. They come mostly from the following sources. Dan Huttenlocher Cornell U David Lowe U. of British Columbia Martial Hebert CMU Intuitively, junctions
INTEREST POINTS AT DIFFERENT SCALES Thank you for the slides. They come mostly from the following sources. Dan Huttenlocher Cornell U David Lowe U. of British Columbia Martial Hebert CMU Intuitively, junctions
Vectors [and more on masks] Vector space theory applies directly to several image processing/ representation problems
![Vectors [and more on masks] Vector space theory applies directly to several image processing/ representation problems](/thumbs/74/71250091.jpg "Vectors [and more on masks] Vector space theory applies directly to several image processing/ representation problems") Vectors [and more on masks] Vector space theory applies directly to several image processing/ representation problems 1 Image as a sum of basic images What if every person s portrait photo could be expressed
Vectors [and more on masks] Vector space theory applies directly to several image processing/ representation problems 1 Image as a sum of basic images What if every person s portrait photo could be expressed
The Frequency Domain : Computational Photography Alexei Efros, CMU, Fall Many slides borrowed from Steve Seitz
 The Frequency Domain 15-463: Computational Photography Alexei Efros, CMU, Fall 2008 Somewhere in Cinque Terre, May 2005 Many slides borrowed from Steve Seitz Salvador Dali Gala Contemplating the Mediterranean
The Frequency Domain 15-463: Computational Photography Alexei Efros, CMU, Fall 2008 Somewhere in Cinque Terre, May 2005 Many slides borrowed from Steve Seitz Salvador Dali Gala Contemplating the Mediterranean
Gaussian derivatives
 Gaussian derivatives UCU Winter School 2017 James Pritts Czech Tecnical University January 16, 2017 1 Images taken from Noah Snavely s and Robert Collins s course notes Definition An image (grayscale)
Gaussian derivatives UCU Winter School 2017 James Pritts Czech Tecnical University January 16, 2017 1 Images taken from Noah Snavely s and Robert Collins s course notes Definition An image (grayscale)
18/10/2017. Image Enhancement in the Spatial Domain: Gray-level transforms. Image Enhancement in the Spatial Domain: Gray-level transforms
 Gray-level transforms Gray-level transforms Generic, possibly nonlinear, pointwise operator (intensity mapping, gray-level transformation): Basic gray-level transformations: Negative: s L 1 r Generic log:
Gray-level transforms Gray-level transforms Generic, possibly nonlinear, pointwise operator (intensity mapping, gray-level transformation): Basic gray-level transformations: Negative: s L 1 r Generic log:
Introduction to Support Vector Machines
 Introduction to Support Vector Machines Hsuan-Tien Lin Learning Systems Group, California Institute of Technology Talk in NTU EE/CS Speech Lab, November 16, 2005 H.-T. Lin (Learning Systems Group) Introduction
Introduction to Support Vector Machines Hsuan-Tien Lin Learning Systems Group, California Institute of Technology Talk in NTU EE/CS Speech Lab, November 16, 2005 H.-T. Lin (Learning Systems Group) Introduction
Harris Corner Detector
 Multimedia Computing: Algorithms, Systems, and Applications: Feature Extraction By Dr. Yu Cao Department of Computer Science The University of Massachusetts Lowell Lowell, MA 01854, USA Part of the slides
Multimedia Computing: Algorithms, Systems, and Applications: Feature Extraction By Dr. Yu Cao Department of Computer Science The University of Massachusetts Lowell Lowell, MA 01854, USA Part of the slides
Advances in Computer Vision. Prof. Bill Freeman. Image and shape descriptors. Readings: Mikolajczyk and Schmid; Belongie et al.
 6.869 Advances in Computer Vision Prof. Bill Freeman March 3, 2005 Image and shape descriptors Affine invariant features Comparison of feature descriptors Shape context Readings: Mikolajczyk and Schmid;
6.869 Advances in Computer Vision Prof. Bill Freeman March 3, 2005 Image and shape descriptors Affine invariant features Comparison of feature descriptors Shape context Readings: Mikolajczyk and Schmid;
Total Variation Image Edge Detection
 Total Variation Image Edge Detection PETER NDAJAH Graduate School of Science and Technology, Niigata University, 8050, Ikarashi 2-no-cho, Nishi-ku, Niigata, 950-28, JAPAN ndajah@telecom0.eng.niigata-u.ac.jp
Total Variation Image Edge Detection PETER NDAJAH Graduate School of Science and Technology, Niigata University, 8050, Ikarashi 2-no-cho, Nishi-ku, Niigata, 950-28, JAPAN ndajah@telecom0.eng.niigata-u.ac.jp
Overview. Introduction to local features. Harris interest points + SSD, ZNCC, SIFT. Evaluation and comparison of different detectors
 Overview Introduction to local features Harris interest points + SSD, ZNCC, SIFT Scale & affine invariant interest point detectors Evaluation and comparison of different detectors Region descriptors and
Overview Introduction to local features Harris interest points + SSD, ZNCC, SIFT Scale & affine invariant interest point detectors Evaluation and comparison of different detectors Region descriptors and
LoG Blob Finding and Scale. Scale Selection. Blobs (and scale selection) Achieving scale covariance. Blob detection in 2D. Blob detection in 2D
 Achieving scale covariance. Blob detection in 2D. Blob detection in 2D") Achieving scale covariance Blobs (and scale selection) Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region
Achieving scale covariance Blobs (and scale selection) Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region
Principal Component Analysis and Singular Value Decomposition. Volker Tresp, Clemens Otte Summer 2014
 Principal Component Analysis and Singular Value Decomposition Volker Tresp, Clemens Otte Summer 2014 1 Motivation So far we always argued for a high-dimensional feature space Still, in some cases it makes
Principal Component Analysis and Singular Value Decomposition Volker Tresp, Clemens Otte Summer 2014 1 Motivation So far we always argued for a high-dimensional feature space Still, in some cases it makes
Efficient Inference in Fully Connected CRFs with Gaussian Edge Potentials
 Efficient Inference in Fully Connected CRFs with Gaussian Edge Potentials by Phillip Krahenbuhl and Vladlen Koltun Presented by Adam Stambler Multi-class image segmentation Assign a class label to each
Efficient Inference in Fully Connected CRFs with Gaussian Edge Potentials by Phillip Krahenbuhl and Vladlen Koltun Presented by Adam Stambler Multi-class image segmentation Assign a class label to each
Announcements. Filtering. Image Filtering. Linear Filters. Example: Smoothing by Averaging. Homework 2 is due Apr 26, 11:59 PM Reading:
 Announcements Filtering Homework 2 is due Apr 26, :59 PM eading: Chapter 4: Linear Filters CSE 52 Lecture 6 mage Filtering nput Output Filter (From Bill Freeman) Example: Smoothing by Averaging Linear
Announcements Filtering Homework 2 is due Apr 26, :59 PM eading: Chapter 4: Linear Filters CSE 52 Lecture 6 mage Filtering nput Output Filter (From Bill Freeman) Example: Smoothing by Averaging Linear