Problem Session #5. EE368/CS232 Digital Image Processing
|
|
|
- Audrey Marshall
- 5 years ago
- Views:
Transcription
1 Problem Session #5 EE368/CS232 Digital Image Processing
2 1. Solving a Jigsaw Puzzle Please download the image hw5_puzzle_pieces.jpg from the handouts webpage, which shows the pieces of a jigsaw puzzle. Since we know that the completed puzzle should show a picture of the famous Mona Lisa painting, we can download an image of the painting from the web to use as a reference when solving the puzzle; you can download hw5_puzzle_reference.jpg from the handouts webpage.

, which we will use later to draw the")
3 Step 1: We binarize the pieces image, with the result shown below. Step 2: We extract an edge map from the binary image (result shown below), which we will use later to draw the boundaries of the jigsaw pieces on top of the reference image.
 to have approximately the same number of pixels as the total number of white pixels in the binary")
4 Step 3: When the jigsaw pieces are fully assembled, the assembled image may have a different size than the reference image. To account for this mismatch, we resize the reference image (maintaining the same aspect ratio) to have approximately the same number of pixels as the total number of white pixels in the binary pieces image. Step 4: We perform region labeling on the binary pieces image.


5 Step 5: For each region in the binary pieces image, we compare the corresponding region in the original color pieces image to different regions in the reference image. Note that the regions being compared are non-rectangular in shape, because we utilize the regional shapes obtained from the segmentation in Step 1. We find the region in the reference image that best matches (has the smallest mean squared difference relative to) each piece region. Reference Template + - Mask x Final Difference Mask
 label that region with the same number")

6 Step 6: For the matching region in the reference image, we (i) label that region with the same number that identifies the jigsaw piece (ii) overlay the boundary of the jigsaw piece using the edge map from Step 2 + EOP

7 2. Eigenfaces and Fisherfaces for Recognition of Glasses In this problem, we will study the use of eigenfaces and fisherfaces for recognizing glasses in images. Please download the following files from the homework webpage: hw5_non_glasses_training.zip: 153 training images of people not wearing glasses hw5_glasses_training.zip: 67 training images of people wearing glasses hw5_non_glasses_testing.zip: 128 testing images of people not wearing glasses hw5_glasses_testing.zip: 52 testing images of people wearing glasses
8 Part A: Compute, display, and submit the mean face image over the training set. Mean Face
9 Part B: Using the Sirovich and Kirby method on the training set, compute the 100 eigenfaces with the largest eigenvalues. Please use mean-removed training samples to compute the eigenfaces and make sure each eigenface has unit L2 norm. Display and submit the top 10 eigenfaces. (MATLAB function: eig) Eigenface 1 Eigenface 2 Eigenface 3 Eigenface 4 Eigenface 5 Eigenface 6 Eigenface 7 Eigenface 8 Eigenface 9 Eigenface 10
10 Part C: Pick one of the eigenfaces from the top 10 eigenfaces which seems to accentuate features around the eyes. Create a 1-d classifier which distinguishes between non-glasses and glasses images by choosing a threshold for the eigenface coefficient that minimizes the error rate for the training images. Report the overall error rate on the training set. Then, evaluate the classifier on the testing images, and report the numbers of non-glasses images and glasses images that are correctly classified, as well as the overall error rate on the testing set. Eigenface Non-glasses Glasses Frequency T = 0.75 Eigenface Transform Coefficient
11 Part D: Using the training set, compute, display, and submit the fisherface for recognizing glasses. Perform Fisher LDA in a 100-dimensional eigenface space (using the top 100 eigenfaces computed previously) and make sure the fisherface has unit L2 norm. Repeat part (c), except replace the single eigenface by the fisherface. Does the fisherface obtain a lower overall error rate on the testing set than a single eigenface? (MATLAB function: eig) Image Perform PCA 100 PCA Coefficients Perform Fisher LDA Fisher LDA Coefficient
12 60 50 Non-glasses Glasses Fisherface Frequency T = 0.45 Fisherface Transform Coefficient
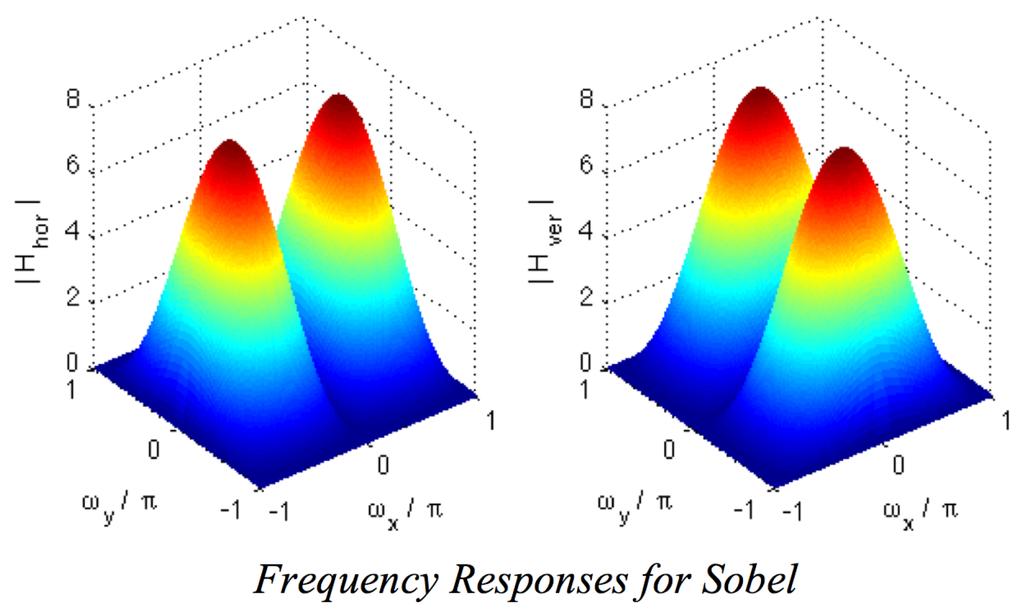
13 3. Frequency Responses of Edge Templates Part A: Derive expressions for the frequency responses of the horizontal and vertical central difference, Prewitt, and Sobel edge templates and of the two diagonal Roberts edge templates. For each template, submit a plot of the magnitude of the frequency response. Which frequency components are boosted and which frequency components are attenuated by each edge template? (MATLAB functions: meshgrid, mesh, surf, abs)
14 Central Difference Operator h hor [x, y] = 1 0 h ver [x, y] = 1 [0] 1 [ ] 1 H hor H ver e jω x,e jω y ( ) = e jω x e jω x = 2 j sin ( ω x ) e jω x,e jω y ( ) = 2 j sin( ω y )
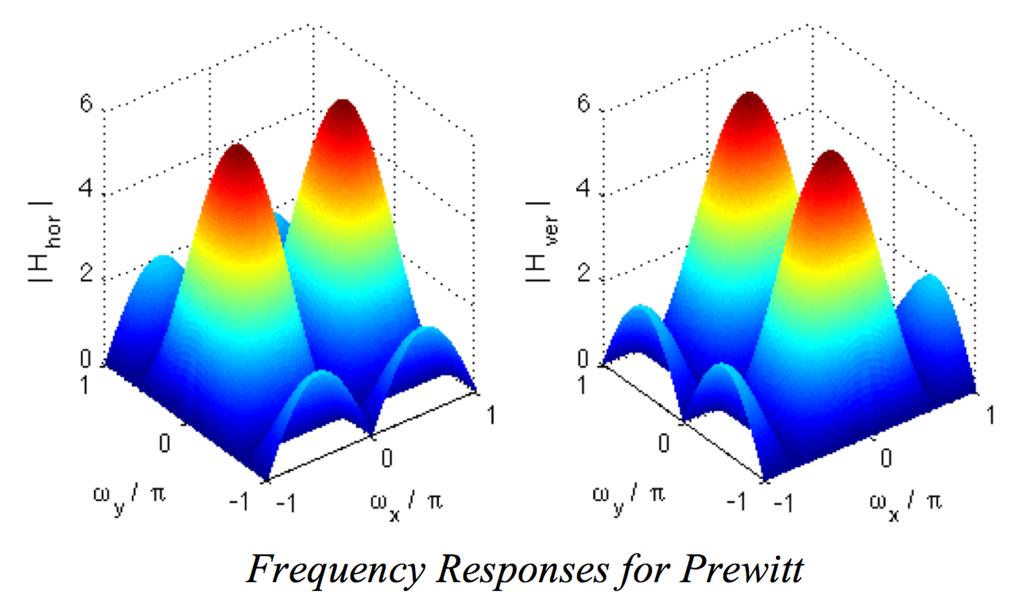
15
16
 of standard deviation σ = 1 and finite extent (6σ +1) (6σ +1).")
17 Part B: In some edge detection algorithms, e.g., the Canny edge detector, convolution with the edge template is combined with convolution with a Gaussian filter for noise suppression. Generate a Gaussian impulse response (function: fspecial) of standard deviation σ = 1 and finite extent (6σ +1) (6σ +1). Compute the Gaussian filter s frequency response (function: freqz2) using the sample frequency-domain sampling grid that you used in Part A. For each edge template, submit a plot of the magnitude of the product of the Gaussian filter s frequency and the edge template filter s frequency response.!

18 Without Gaussian Prefilter With Gaussian Prefilter

19 4. Document Image Restoration Please download the image hw5_insurance_form.jpg from the homework webpage. During faxing, the form has suffered some image distortions: it is slightly rotated and some of the table s horizontal and vertical lines have been erased. Design and implement an algorithm to automatically rotate the form to an upright orientation and repair the gaps in the broken lines. Clearly describe the steps in your algorithm, showing intermediate results for clarification if necessary. Display and submit the final restored image.
20 Binarization with Otsu s Method
21 Hough Transform MATLAB: hough, houghpeaks Orientation Histogram for Peaks in Hough Transform
22 Rotated to Upright Orientation MATLAB: imrotate
23 Erosion by 35-pixel Vertical Line MATLAB: imerode

24 Closing by 201-pixel Vertical Line MATLAB: imclose
25 Restoration of Vertical Lines in Table
26 Erosion by 49-pixel Horizontal Line MATLAB: imerode
27 Closing by 301-pixel Horizontal Line MATLAB: imclose
28 Restoration of Horizontal Lines in Table
29 Final Restoration Result EOP
EE368/CS232 Digital Image Processing Winter Homework #5 Solutions
 EE368/CS232 Digital Image Processing Winter 2017-2018 Homework #5 Solutions 1. Solving a Jigsaw Puzzle We present one possible algorithm for solving the jigsaw puzzle. Other clearly explained algorithms
EE368/CS232 Digital Image Processing Winter 2017-2018 Homework #5 Solutions 1. Solving a Jigsaw Puzzle We present one possible algorithm for solving the jigsaw puzzle. Other clearly explained algorithms
Roadmap. Introduction to image analysis (computer vision) Theory of edge detection. Applications
 Theory of edge detection. Applications") Edge Detection Roadmap Introduction to image analysis (computer vision) Its connection with psychology and neuroscience Why is image analysis difficult? Theory of edge detection Gradient operator Advanced
Edge Detection Roadmap Introduction to image analysis (computer vision) Its connection with psychology and neuroscience Why is image analysis difficult? Theory of edge detection Gradient operator Advanced
Machine vision. Summary # 4. The mask for Laplacian is given
 1 Machine vision Summary # 4 The mask for Laplacian is given L = 0 1 0 1 4 1 (6) 0 1 0 Another Laplacian mask that gives more importance to the center element is L = 1 1 1 1 8 1 (7) 1 1 1 Note that the
1 Machine vision Summary # 4 The mask for Laplacian is given L = 0 1 0 1 4 1 (6) 0 1 0 Another Laplacian mask that gives more importance to the center element is L = 1 1 1 1 8 1 (7) 1 1 1 Note that the
Machine vision, spring 2018 Summary 4
 Machine vision Summary # 4 The mask for Laplacian is given L = 4 (6) Another Laplacian mask that gives more importance to the center element is given by L = 8 (7) Note that the sum of the elements in the
Machine vision Summary # 4 The mask for Laplacian is given L = 4 (6) Another Laplacian mask that gives more importance to the center element is given by L = 8 (7) Note that the sum of the elements in the
Edge Detection. Introduction to Computer Vision. Useful Mathematics Funcs. The bad news
 Edge Detection Introduction to Computer Vision CS / ECE 8B Thursday, April, 004 Edge detection (HO #5) Edge detection is a local area operator that seeks to find significant, meaningful changes in image
Edge Detection Introduction to Computer Vision CS / ECE 8B Thursday, April, 004 Edge detection (HO #5) Edge detection is a local area operator that seeks to find significant, meaningful changes in image
Edge Detection. Image Processing - Computer Vision
 Image Processing - Lesson 10 Edge Detection Image Processing - Computer Vision Low Level Edge detection masks Gradient Detectors Compass Detectors Second Derivative - Laplace detectors Edge Linking Image
Image Processing - Lesson 10 Edge Detection Image Processing - Computer Vision Low Level Edge detection masks Gradient Detectors Compass Detectors Second Derivative - Laplace detectors Edge Linking Image
Basics on 2-D 2 D Random Signal
 Basics on -D D Random Signal Spring 06 Instructor: K. J. Ray Liu ECE Department, Univ. of Maryland, College Park Overview Last Time: Fourier Analysis for -D signals Image enhancement via spatial filtering
Basics on -D D Random Signal Spring 06 Instructor: K. J. Ray Liu ECE Department, Univ. of Maryland, College Park Overview Last Time: Fourier Analysis for -D signals Image enhancement via spatial filtering
Lecture 24: Principal Component Analysis. Aykut Erdem May 2016 Hacettepe University
 Lecture 4: Principal Component Analysis Aykut Erdem May 016 Hacettepe University This week Motivation PCA algorithms Applications PCA shortcomings Autoencoders Kernel PCA PCA Applications Data Visualization
Lecture 4: Principal Component Analysis Aykut Erdem May 016 Hacettepe University This week Motivation PCA algorithms Applications PCA shortcomings Autoencoders Kernel PCA PCA Applications Data Visualization
Example: Face Detection
 Announcements HW1 returned New attendance policy Face Recognition: Dimensionality Reduction On time: 1 point Five minutes or more late: 0.5 points Absent: 0 points Biometrics CSE 190 Lecture 14 CSE190,
Announcements HW1 returned New attendance policy Face Recognition: Dimensionality Reduction On time: 1 point Five minutes or more late: 0.5 points Absent: 0 points Biometrics CSE 190 Lecture 14 CSE190,
ECE 661: Homework 10 Fall 2014
 ECE 661: Homework 10 Fall 2014 This homework consists of the following two parts: (1) Face recognition with PCA and LDA for dimensionality reduction and the nearest-neighborhood rule for classification;
ECE 661: Homework 10 Fall 2014 This homework consists of the following two parts: (1) Face recognition with PCA and LDA for dimensionality reduction and the nearest-neighborhood rule for classification;
Filtering and Edge Detection
 Filtering and Edge Detection Local Neighborhoods Hard to tell anything from a single pixel Example: you see a reddish pixel. Is this the object s color? Illumination? Noise? The next step in order of complexity
Filtering and Edge Detection Local Neighborhoods Hard to tell anything from a single pixel Example: you see a reddish pixel. Is this the object s color? Illumination? Noise? The next step in order of complexity
Principal Component Analysis
 B: Chapter 1 HTF: Chapter 1.5 Principal Component Analysis Barnabás Póczos University of Alberta Nov, 009 Contents Motivation PCA algorithms Applications Face recognition Facial expression recognition
B: Chapter 1 HTF: Chapter 1.5 Principal Component Analysis Barnabás Póczos University of Alberta Nov, 009 Contents Motivation PCA algorithms Applications Face recognition Facial expression recognition
Recognition Using Class Specific Linear Projection. Magali Segal Stolrasky Nadav Ben Jakov April, 2015
 Recognition Using Class Specific Linear Projection Magali Segal Stolrasky Nadav Ben Jakov April, 2015 Articles Eigenfaces vs. Fisherfaces Recognition Using Class Specific Linear Projection, Peter N. Belhumeur,
Recognition Using Class Specific Linear Projection Magali Segal Stolrasky Nadav Ben Jakov April, 2015 Articles Eigenfaces vs. Fisherfaces Recognition Using Class Specific Linear Projection, Peter N. Belhumeur,
Laplacian Filters. Sobel Filters. Laplacian Filters. Laplacian Filters. Laplacian Filters. Laplacian Filters
 Sobel Filters Note that smoothing the image before applying a Sobel filter typically gives better results. Even thresholding the Sobel filtered image cannot usually create precise, i.e., -pixel wide, edges.
Sobel Filters Note that smoothing the image before applying a Sobel filter typically gives better results. Even thresholding the Sobel filtered image cannot usually create precise, i.e., -pixel wide, edges.
Local Enhancement. Local enhancement
 Local Enhancement Local Enhancement Median filtering (see notes/slides, 3.5.2) HW4 due next Wednesday Required Reading: Sections 3.3, 3.4, 3.5, 3.6, 3.7 Local Enhancement 1 Local enhancement Sometimes
Local Enhancement Local Enhancement Median filtering (see notes/slides, 3.5.2) HW4 due next Wednesday Required Reading: Sections 3.3, 3.4, 3.5, 3.6, 3.7 Local Enhancement 1 Local enhancement Sometimes
Feature Extraction and Image Processing
 Feature Extraction and Image Processing Second edition Mark S. Nixon Alberto S. Aguado :*авш JBK IIP AMSTERDAM BOSTON HEIDELBERG LONDON NEW YORK OXFORD PARIS SAN DIEGO SAN FRANCISCO SINGAPORE SYDNEY TOKYO
Feature Extraction and Image Processing Second edition Mark S. Nixon Alberto S. Aguado :*авш JBK IIP AMSTERDAM BOSTON HEIDELBERG LONDON NEW YORK OXFORD PARIS SAN DIEGO SAN FRANCISCO SINGAPORE SYDNEY TOKYO
Advanced Introduction to Machine Learning CMU-10715
 Advanced Introduction to Machine Learning CMU-10715 Principal Component Analysis Barnabás Póczos Contents Motivation PCA algorithms Applications Some of these slides are taken from Karl Booksh Research
Advanced Introduction to Machine Learning CMU-10715 Principal Component Analysis Barnabás Póczos Contents Motivation PCA algorithms Applications Some of these slides are taken from Karl Booksh Research
Eigenimaging for Facial Recognition
 Eigenimaging for Facial Recognition Aaron Kosmatin, Clayton Broman December 2, 21 Abstract The interest of this paper is Principal Component Analysis, specifically its area of application to facial recognition
Eigenimaging for Facial Recognition Aaron Kosmatin, Clayton Broman December 2, 21 Abstract The interest of this paper is Principal Component Analysis, specifically its area of application to facial recognition
W vs. QCD Jet Tagging at the Large Hadron Collider
 W vs. QCD Jet Tagging at the Large Hadron Collider Bryan Anenberg: anenberg@stanford.edu; CS229 December 13, 2013 Problem Statement High energy collisions of protons at the Large Hadron Collider (LHC)
W vs. QCD Jet Tagging at the Large Hadron Collider Bryan Anenberg: anenberg@stanford.edu; CS229 December 13, 2013 Problem Statement High energy collisions of protons at the Large Hadron Collider (LHC)
Keywords Eigenface, face recognition, kernel principal component analysis, machine learning. II. LITERATURE REVIEW & OVERVIEW OF PROPOSED METHODOLOGY
 Volume 6, Issue 3, March 2016 ISSN: 2277 128X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com Eigenface and
Volume 6, Issue 3, March 2016 ISSN: 2277 128X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com Eigenface and
Image Analysis & Retrieval. Lec 14. Eigenface and Fisherface
 Image Analysis & Retrieval Lec 14 Eigenface and Fisherface Zhu Li Dept of CSEE, UMKC Office: FH560E, Email: lizhu@umkc.edu, Ph: x 2346. http://l.web.umkc.edu/lizhu Z. Li, Image Analysis & Retrv, Spring
Image Analysis & Retrieval Lec 14 Eigenface and Fisherface Zhu Li Dept of CSEE, UMKC Office: FH560E, Email: lizhu@umkc.edu, Ph: x 2346. http://l.web.umkc.edu/lizhu Z. Li, Image Analysis & Retrv, Spring
Image Segmentation: Definition Importance. Digital Image Processing, 2nd ed. Chapter 10 Image Segmentation.
 : Definition Importance Detection of Discontinuities: 9 R = wi z i= 1 i Point Detection: 1. A Mask 2. Thresholding R T Line Detection: A Suitable Mask in desired direction Thresholding Line i : R R, j
: Definition Importance Detection of Discontinuities: 9 R = wi z i= 1 i Point Detection: 1. A Mask 2. Thresholding R T Line Detection: A Suitable Mask in desired direction Thresholding Line i : R R, j
Robot Image Credit: Viktoriya Sukhanova 123RF.com. Dimensionality Reduction
 Robot Image Credit: Viktoriya Sukhanova 13RF.com Dimensionality Reduction Feature Selection vs. Dimensionality Reduction Feature Selection (last time) Select a subset of features. When classifying novel
Robot Image Credit: Viktoriya Sukhanova 13RF.com Dimensionality Reduction Feature Selection vs. Dimensionality Reduction Feature Selection (last time) Select a subset of features. When classifying novel
Eigenimages. Digital Image Processing: Bernd Girod, 2013 Stanford University -- Eigenimages 1
 Eigenimages " Unitary transforms" Karhunen-Loève transform" Eigenimages for recognition" Sirovich and Kirby method" Example: eigenfaces" Eigenfaces vs. Fisherfaces" Digital Image Processing: Bernd Girod,
Eigenimages " Unitary transforms" Karhunen-Loève transform" Eigenimages for recognition" Sirovich and Kirby method" Example: eigenfaces" Eigenfaces vs. Fisherfaces" Digital Image Processing: Bernd Girod,
Edge Detection. CS 650: Computer Vision
 CS 650: Computer Vision Edges and Gradients Edge: local indication of an object transition Edge detection: local operators that find edges (usually involves convolution) Local intensity transitions are
CS 650: Computer Vision Edges and Gradients Edge: local indication of an object transition Edge detection: local operators that find edges (usually involves convolution) Local intensity transitions are
COS 429: COMPUTER VISON Face Recognition
 COS 429: COMPUTER VISON Face Recognition Intro to recognition PCA and Eigenfaces LDA and Fisherfaces Face detection: Viola & Jones (Optional) generic object models for faces: the Constellation Model Reading:
COS 429: COMPUTER VISON Face Recognition Intro to recognition PCA and Eigenfaces LDA and Fisherfaces Face detection: Viola & Jones (Optional) generic object models for faces: the Constellation Model Reading:
Deriving Principal Component Analysis (PCA)
") -0 Mathematical Foundations for Machine Learning Machine Learning Department School of Computer Science Carnegie Mellon University Deriving Principal Component Analysis (PCA) Matt Gormley Lecture 11 Oct.
-0 Mathematical Foundations for Machine Learning Machine Learning Department School of Computer Science Carnegie Mellon University Deriving Principal Component Analysis (PCA) Matt Gormley Lecture 11 Oct.
CITS 4402 Computer Vision
 CITS 4402 Computer Vision A/Prof Ajmal Mian Adj/A/Prof Mehdi Ravanbakhsh Lecture 06 Object Recognition Objectives To understand the concept of image based object recognition To learn how to match images
CITS 4402 Computer Vision A/Prof Ajmal Mian Adj/A/Prof Mehdi Ravanbakhsh Lecture 06 Object Recognition Objectives To understand the concept of image based object recognition To learn how to match images
Lecture 04 Image Filtering
 Institute of Informatics Institute of Neuroinformatics Lecture 04 Image Filtering Davide Scaramuzza 1 Lab Exercise 2 - Today afternoon Room ETH HG E 1.1 from 13:15 to 15:00 Work description: your first
Institute of Informatics Institute of Neuroinformatics Lecture 04 Image Filtering Davide Scaramuzza 1 Lab Exercise 2 - Today afternoon Room ETH HG E 1.1 from 13:15 to 15:00 Work description: your first
Bananagrams Tile Extraction and Letter Recognition for Rapid Word Suggestion
 Bananagrams Tile Extraction and Letter Recognition for Rapid Word Suggestion Steven Leung, Steffi Perkins, and Colleen Rhoades Department of Bioengineering Stanford University Stanford, CA Abstract Bananagrams
Bananagrams Tile Extraction and Letter Recognition for Rapid Word Suggestion Steven Leung, Steffi Perkins, and Colleen Rhoades Department of Bioengineering Stanford University Stanford, CA Abstract Bananagrams
Problem Set 2. MAS 622J/1.126J: Pattern Recognition and Analysis. Due: 5:00 p.m. on September 30
 Problem Set 2 MAS 622J/1.126J: Pattern Recognition and Analysis Due: 5:00 p.m. on September 30 [Note: All instructions to plot data or write a program should be carried out using Matlab. In order to maintain
Problem Set 2 MAS 622J/1.126J: Pattern Recognition and Analysis Due: 5:00 p.m. on September 30 [Note: All instructions to plot data or write a program should be carried out using Matlab. In order to maintain
Edges and Scale. Image Features. Detecting edges. Origin of Edges. Solution: smooth first. Effects of noise
 Edges and Scale Image Features From Sandlot Science Slides revised from S. Seitz, R. Szeliski, S. Lazebnik, etc. Origin of Edges surface normal discontinuity depth discontinuity surface color discontinuity
Edges and Scale Image Features From Sandlot Science Slides revised from S. Seitz, R. Szeliski, S. Lazebnik, etc. Origin of Edges surface normal discontinuity depth discontinuity surface color discontinuity
Multimedia Databases. Previous Lecture. 4.1 Multiresolution Analysis. 4 Shape-based Features. 4.1 Multiresolution Analysis
 Previous Lecture Multimedia Databases Texture-Based Image Retrieval Low Level Features Tamura Measure, Random Field Model High-Level Features Fourier-Transform, Wavelets Wolf-Tilo Balke Silviu Homoceanu
Previous Lecture Multimedia Databases Texture-Based Image Retrieval Low Level Features Tamura Measure, Random Field Model High-Level Features Fourier-Transform, Wavelets Wolf-Tilo Balke Silviu Homoceanu
Homework Set 3 Solutions REVISED EECS 455 Oct. 25, Revisions to solutions to problems 2, 6 and marked with ***
 Homework Set 3 Solutions REVISED EECS 455 Oct. 25, 2006 Revisions to solutions to problems 2, 6 and marked with ***. Let U be a continuous random variable with pdf p U (u). Consider an N-point quantizer
Homework Set 3 Solutions REVISED EECS 455 Oct. 25, 2006 Revisions to solutions to problems 2, 6 and marked with ***. Let U be a continuous random variable with pdf p U (u). Consider an N-point quantizer
Multimedia Databases. Wolf-Tilo Balke Philipp Wille Institut für Informationssysteme Technische Universität Braunschweig
 Multimedia Databases Wolf-Tilo Balke Philipp Wille Institut für Informationssysteme Technische Universität Braunschweig http://www.ifis.cs.tu-bs.de 4 Previous Lecture Texture-Based Image Retrieval Low
Multimedia Databases Wolf-Tilo Balke Philipp Wille Institut für Informationssysteme Technische Universität Braunschweig http://www.ifis.cs.tu-bs.de 4 Previous Lecture Texture-Based Image Retrieval Low
6.867 Machine Learning
 6.867 Machine Learning Problem Set 2 Due date: Wednesday October 6 Please address all questions and comments about this problem set to 6867-staff@csail.mit.edu. You will need to use MATLAB for some of
6.867 Machine Learning Problem Set 2 Due date: Wednesday October 6 Please address all questions and comments about this problem set to 6867-staff@csail.mit.edu. You will need to use MATLAB for some of
FACE RECOGNITION BY EIGENFACE AND ELASTIC BUNCH GRAPH MATCHING. Master of Philosophy Research Project First-term Report SUPERVISED BY
 FACE RECOGNITION BY EIGENFACE AND ELASTIC BUNCH GRAPH MATCHING Master of Philosophy Research Proect First-term Report SUPERVISED BY Professor LYU, Rung Tsong Michael PREPARED BY JANG KIM FUNG (01036550)
FACE RECOGNITION BY EIGENFACE AND ELASTIC BUNCH GRAPH MATCHING Master of Philosophy Research Proect First-term Report SUPERVISED BY Professor LYU, Rung Tsong Michael PREPARED BY JANG KIM FUNG (01036550)
Lecture 6: Edge Detection. CAP 5415: Computer Vision Fall 2008
 Lecture 6: Edge Detection CAP 5415: Computer Vision Fall 2008 Announcements PS 2 is available Please read it by Thursday During Thursday lecture, I will be going over it in some detail Monday - Computer
Lecture 6: Edge Detection CAP 5415: Computer Vision Fall 2008 Announcements PS 2 is available Please read it by Thursday During Thursday lecture, I will be going over it in some detail Monday - Computer
Image Analysis & Retrieval Lec 14 - Eigenface & Fisherface
 CS/EE 5590 / ENG 401 Special Topics, Spring 2018 Image Analysis & Retrieval Lec 14 - Eigenface & Fisherface Zhu Li Dept of CSEE, UMKC http://l.web.umkc.edu/lizhu Office Hour: Tue/Thr 2:30-4pm@FH560E, Contact:
CS/EE 5590 / ENG 401 Special Topics, Spring 2018 Image Analysis & Retrieval Lec 14 - Eigenface & Fisherface Zhu Li Dept of CSEE, UMKC http://l.web.umkc.edu/lizhu Office Hour: Tue/Thr 2:30-4pm@FH560E, Contact:
The Detection Techniques for Several Different Types of Fiducial Markers
 Vol. 1, No. 2, pp. 86-93(2013) The Detection Techniques for Several Different Types of Fiducial Markers Chuen-Horng Lin 1,*,Yu-Ching Lin 1,and Hau-Wei Lee 2 1 Department of Computer Science and Information
Vol. 1, No. 2, pp. 86-93(2013) The Detection Techniques for Several Different Types of Fiducial Markers Chuen-Horng Lin 1,*,Yu-Ching Lin 1,and Hau-Wei Lee 2 1 Department of Computer Science and Information
Reconnaissance d objetsd et vision artificielle
 Reconnaissance d objetsd et vision artificielle http://www.di.ens.fr/willow/teaching/recvis09 Lecture 6 Face recognition Face detection Neural nets Attention! Troisième exercice de programmation du le
Reconnaissance d objetsd et vision artificielle http://www.di.ens.fr/willow/teaching/recvis09 Lecture 6 Face recognition Face detection Neural nets Attention! Troisième exercice de programmation du le
CITS 4402 Computer Vision
 CITS 4402 Computer Vision Prof Ajmal Mian Adj/A/Prof Mehdi Ravanbakhsh, CEO at Mapizy (www.mapizy.com) and InFarm (www.infarm.io) Lecture 04 Greyscale Image Analysis Lecture 03 Summary Images as 2-D signals
CITS 4402 Computer Vision Prof Ajmal Mian Adj/A/Prof Mehdi Ravanbakhsh, CEO at Mapizy (www.mapizy.com) and InFarm (www.infarm.io) Lecture 04 Greyscale Image Analysis Lecture 03 Summary Images as 2-D signals
Non-parametric Classification of Facial Features
 Non-parametric Classification of Facial Features Hyun Sung Chang Department of Electrical Engineering and Computer Science Massachusetts Institute of Technology Problem statement In this project, I attempted
Non-parametric Classification of Facial Features Hyun Sung Chang Department of Electrical Engineering and Computer Science Massachusetts Institute of Technology Problem statement In this project, I attempted
Multimedia Databases. 4 Shape-based Features. 4.1 Multiresolution Analysis. 4.1 Multiresolution Analysis. 4.1 Multiresolution Analysis
 4 Shape-based Features Multimedia Databases Wolf-Tilo Balke Silviu Homoceanu Institut für Informationssysteme Technische Universität Braunschweig http://www.ifis.cs.tu-bs.de 4 Multiresolution Analysis
4 Shape-based Features Multimedia Databases Wolf-Tilo Balke Silviu Homoceanu Institut für Informationssysteme Technische Universität Braunschweig http://www.ifis.cs.tu-bs.de 4 Multiresolution Analysis
Dimensionality Reduction: PCA. Nicholas Ruozzi University of Texas at Dallas
 Dimensionality Reduction: PCA Nicholas Ruozzi University of Texas at Dallas Eigenvalues λ is an eigenvalue of a matrix A R n n if the linear system Ax = λx has at least one non-zero solution If Ax = λx
Dimensionality Reduction: PCA Nicholas Ruozzi University of Texas at Dallas Eigenvalues λ is an eigenvalue of a matrix A R n n if the linear system Ax = λx has at least one non-zero solution If Ax = λx
Review for Exam 1. Erik G. Learned-Miller Department of Computer Science University of Massachusetts, Amherst Amherst, MA
 Review for Exam Erik G. Learned-Miller Department of Computer Science University of Massachusetts, Amherst Amherst, MA 0003 March 26, 204 Abstract Here are some things you need to know for the in-class
Review for Exam Erik G. Learned-Miller Department of Computer Science University of Massachusetts, Amherst Amherst, MA 0003 March 26, 204 Abstract Here are some things you need to know for the in-class
CS 3710: Visual Recognition Describing Images with Features. Adriana Kovashka Department of Computer Science January 8, 2015
 CS 3710: Visual Recognition Describing Images with Features Adriana Kovashka Department of Computer Science January 8, 2015 Plan for Today Presentation assignments + schedule changes Image filtering Feature
CS 3710: Visual Recognition Describing Images with Features Adriana Kovashka Department of Computer Science January 8, 2015 Plan for Today Presentation assignments + schedule changes Image filtering Feature
Introduction to Computer Vision. 2D Linear Systems
 Introduction to Computer Vision D Linear Systems Review: Linear Systems We define a system as a unit that converts an input function into an output function Independent variable System operator or Transfer
Introduction to Computer Vision D Linear Systems Review: Linear Systems We define a system as a unit that converts an input function into an output function Independent variable System operator or Transfer
6 The SVD Applied to Signal and Image Deblurring
 6 The SVD Applied to Signal and Image Deblurring We will discuss the restoration of one-dimensional signals and two-dimensional gray-scale images that have been contaminated by blur and noise. After an
6 The SVD Applied to Signal and Image Deblurring We will discuss the restoration of one-dimensional signals and two-dimensional gray-scale images that have been contaminated by blur and noise. After an
Lecture 7: Edge Detection
 #1 Lecture 7: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Definition of an Edge First Order Derivative Approximation as Edge Detector #2 This Lecture Examples of Edge Detection
#1 Lecture 7: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Definition of an Edge First Order Derivative Approximation as Edge Detector #2 This Lecture Examples of Edge Detection
Modeling Classes of Shapes Suppose you have a class of shapes with a range of variations: System 2 Overview
 4 4 4 6 4 4 4 6 4 4 4 6 4 4 4 6 4 4 4 6 4 4 4 6 4 4 4 6 4 4 4 6 Modeling Classes of Shapes Suppose you have a class of shapes with a range of variations: System processes System Overview Previous Systems:
4 4 4 6 4 4 4 6 4 4 4 6 4 4 4 6 4 4 4 6 4 4 4 6 4 4 4 6 4 4 4 6 Modeling Classes of Shapes Suppose you have a class of shapes with a range of variations: System processes System Overview Previous Systems:
CLUe Training An Introduction to Machine Learning in R with an example from handwritten digit recognition
 CLUe Training An Introduction to Machine Learning in R with an example from handwritten digit recognition Ad Feelders Universiteit Utrecht Department of Information and Computing Sciences Algorithmic Data
CLUe Training An Introduction to Machine Learning in R with an example from handwritten digit recognition Ad Feelders Universiteit Utrecht Department of Information and Computing Sciences Algorithmic Data
8 The SVD Applied to Signal and Image Deblurring
 8 The SVD Applied to Signal and Image Deblurring We will discuss the restoration of one-dimensional signals and two-dimensional gray-scale images that have been contaminated by blur and noise. After an
8 The SVD Applied to Signal and Image Deblurring We will discuss the restoration of one-dimensional signals and two-dimensional gray-scale images that have been contaminated by blur and noise. After an
8 The SVD Applied to Signal and Image Deblurring
 8 The SVD Applied to Signal and Image Deblurring We will discuss the restoration of one-dimensional signals and two-dimensional gray-scale images that have been contaminated by blur and noise. After an
8 The SVD Applied to Signal and Image Deblurring We will discuss the restoration of one-dimensional signals and two-dimensional gray-scale images that have been contaminated by blur and noise. After an
SURF Features. Jacky Baltes Dept. of Computer Science University of Manitoba WWW:
 SURF Features Jacky Baltes Dept. of Computer Science University of Manitoba Email: jacky@cs.umanitoba.ca WWW: http://www.cs.umanitoba.ca/~jacky Salient Spatial Features Trying to find interest points Points
SURF Features Jacky Baltes Dept. of Computer Science University of Manitoba Email: jacky@cs.umanitoba.ca WWW: http://www.cs.umanitoba.ca/~jacky Salient Spatial Features Trying to find interest points Points
EECS490: Digital Image Processing. Lecture #11
 Lecture #11 Filtering Applications: OCR, scanning Highpass filters Laplacian in the frequency domain Image enhancement using highpass filters Homomorphic filters Bandreject/bandpass/notch filters Correlation
Lecture #11 Filtering Applications: OCR, scanning Highpass filters Laplacian in the frequency domain Image enhancement using highpass filters Homomorphic filters Bandreject/bandpass/notch filters Correlation
Homework 6 Solutions
 8-290 Signals and Systems Profs. Byron Yu and Pulkit Grover Fall 208 Homework 6 Solutions. Part One. (2 points) Consider an LTI system with impulse response h(t) e αt u(t), (a) Compute the frequency response
8-290 Signals and Systems Profs. Byron Yu and Pulkit Grover Fall 208 Homework 6 Solutions. Part One. (2 points) Consider an LTI system with impulse response h(t) e αt u(t), (a) Compute the frequency response
Principal Component Analysis and Singular Value Decomposition. Volker Tresp, Clemens Otte Summer 2014
 Principal Component Analysis and Singular Value Decomposition Volker Tresp, Clemens Otte Summer 2014 1 Motivation So far we always argued for a high-dimensional feature space Still, in some cases it makes
Principal Component Analysis and Singular Value Decomposition Volker Tresp, Clemens Otte Summer 2014 1 Motivation So far we always argued for a high-dimensional feature space Still, in some cases it makes
CS 231A Section 1: Linear Algebra & Probability Review
 CS 231A Section 1: Linear Algebra & Probability Review 1 Topics Support Vector Machines Boosting Viola-Jones face detector Linear Algebra Review Notation Operations & Properties Matrix Calculus Probability
CS 231A Section 1: Linear Algebra & Probability Review 1 Topics Support Vector Machines Boosting Viola-Jones face detector Linear Algebra Review Notation Operations & Properties Matrix Calculus Probability
CS 231A Section 1: Linear Algebra & Probability Review. Kevin Tang
 CS 231A Section 1: Linear Algebra & Probability Review Kevin Tang Kevin Tang Section 1-1 9/30/2011 Topics Support Vector Machines Boosting Viola Jones face detector Linear Algebra Review Notation Operations
CS 231A Section 1: Linear Algebra & Probability Review Kevin Tang Kevin Tang Section 1-1 9/30/2011 Topics Support Vector Machines Boosting Viola Jones face detector Linear Algebra Review Notation Operations
EECS490: Digital Image Processing. Lecture #26
 Lecture #26 Moments; invariant moments Eigenvector, principal component analysis Boundary coding Image primitives Image representation: trees, graphs Object recognition and classes Minimum distance classifiers
Lecture #26 Moments; invariant moments Eigenvector, principal component analysis Boundary coding Image primitives Image representation: trees, graphs Object recognition and classes Minimum distance classifiers
Automatic detection and of dipoles in large area SQUID magnetometry
 Automatic detection and of dipoles in large area SQUID magnetometry Lisa Qian December 4, Introduction. Scanning SQUID magnetometry Scanning SQUID magnetometry is a powerful tool for metrology of individual
Automatic detection and of dipoles in large area SQUID magnetometry Lisa Qian December 4, Introduction. Scanning SQUID magnetometry Scanning SQUID magnetometry is a powerful tool for metrology of individual
Real Time Face Detection and Recognition using Haar - Based Cascade Classifier and Principal Component Analysis
 Real Time Face Detection and Recognition using Haar - Based Cascade Classifier and Principal Component Analysis Sarala A. Dabhade PG student M. Tech (Computer Egg) BVDU s COE Pune Prof. Mrunal S. Bewoor
Real Time Face Detection and Recognition using Haar - Based Cascade Classifier and Principal Component Analysis Sarala A. Dabhade PG student M. Tech (Computer Egg) BVDU s COE Pune Prof. Mrunal S. Bewoor
Image Analysis. PCA and Eigenfaces
 Image Analysis PCA and Eigenfaces Christophoros Nikou cnikou@cs.uoi.gr Images taken from: D. Forsyth and J. Ponce. Computer Vision: A Modern Approach, Prentice Hall, 2003. Computer Vision course by Svetlana
Image Analysis PCA and Eigenfaces Christophoros Nikou cnikou@cs.uoi.gr Images taken from: D. Forsyth and J. Ponce. Computer Vision: A Modern Approach, Prentice Hall, 2003. Computer Vision course by Svetlana
Unsupervised Learning: K- Means & PCA
 Unsupervised Learning: K- Means & PCA Unsupervised Learning Supervised learning used labeled data pairs (x, y) to learn a func>on f : X Y But, what if we don t have labels? No labels = unsupervised learning
Unsupervised Learning: K- Means & PCA Unsupervised Learning Supervised learning used labeled data pairs (x, y) to learn a func>on f : X Y But, what if we don t have labels? No labels = unsupervised learning
Introduction to Computer Vision
 Introduction to Computer Vision Michael J. Black Oct. 2009 Lecture 10: Images as vectors. Appearance-based models. News Assignment 1 parts 3&4 extension. Due tomorrow, Tuesday, 10/6 at 11am. Goals Images
Introduction to Computer Vision Michael J. Black Oct. 2009 Lecture 10: Images as vectors. Appearance-based models. News Assignment 1 parts 3&4 extension. Due tomorrow, Tuesday, 10/6 at 11am. Goals Images
Robust Angle Invariant 1D Barcode Detection
 Robust Angle Invariant 1D Barcode Detection Alessandro Zamberletti A. Zamberletti, I. Gallo and S. Albertini Department of Theoretical and Applied Science (DiSTA) University of Insubria ACPR2013 8 November
Robust Angle Invariant 1D Barcode Detection Alessandro Zamberletti A. Zamberletti, I. Gallo and S. Albertini Department of Theoretical and Applied Science (DiSTA) University of Insubria ACPR2013 8 November
Representing Images Detecting faces in images
 11-755 Machine Learning for Signal Processing Representing Images Detecting faces in images Class 5. 15 Sep 2009 Instructor: Bhiksha Raj Last Class: Representing Audio n Basic DFT n Computing a Spectrogram
11-755 Machine Learning for Signal Processing Representing Images Detecting faces in images Class 5. 15 Sep 2009 Instructor: Bhiksha Raj Last Class: Representing Audio n Basic DFT n Computing a Spectrogram
Image Similarity Test Using Eigenface Calculation
 2017 IJSRST Volume 3 Issue 6 Print ISSN: 2395-6011 Online ISSN: 2395-602X Themed Section: Science and Technology Image Similarity Test Using Eigenface Calculation Nadya Andhika Putri 1, Andysah Putera
2017 IJSRST Volume 3 Issue 6 Print ISSN: 2395-6011 Online ISSN: 2395-602X Themed Section: Science and Technology Image Similarity Test Using Eigenface Calculation Nadya Andhika Putri 1, Andysah Putera
Designing Information Devices and Systems I Spring 2017 Babak Ayazifar, Vladimir Stojanovic Homework 4
 EECS 16A Designing Information Devices and Systems I Spring 2017 Babak Ayazifar, Vladimir Stojanovic Homework This homework is due February 22, 2017, at 2:59. Self-grades are due February 27, 2017, at
EECS 16A Designing Information Devices and Systems I Spring 2017 Babak Ayazifar, Vladimir Stojanovic Homework This homework is due February 22, 2017, at 2:59. Self-grades are due February 27, 2017, at
Compressive Sensing, Low Rank models, and Low Rank Submatrix
 Compressive Sensing,, and Low Rank Submatrix NICTA Short Course 2012 yi.li@nicta.com.au http://users.cecs.anu.edu.au/~yili Sep 12, 2012 ver. 1.8 http://tinyurl.com/brl89pk Outline Introduction 1 Introduction
Compressive Sensing,, and Low Rank Submatrix NICTA Short Course 2012 yi.li@nicta.com.au http://users.cecs.anu.edu.au/~yili Sep 12, 2012 ver. 1.8 http://tinyurl.com/brl89pk Outline Introduction 1 Introduction
Local enhancement. Local Enhancement. Local histogram equalized. Histogram equalized. Local Contrast Enhancement. Fig 3.23: Another example
 Local enhancement Local Enhancement Median filtering Local Enhancement Sometimes Local Enhancement is Preferred. Malab: BlkProc operation for block processing. Left: original tire image. 0/07/00 Local
Local enhancement Local Enhancement Median filtering Local Enhancement Sometimes Local Enhancement is Preferred. Malab: BlkProc operation for block processing. Left: original tire image. 0/07/00 Local
6.094 Introduction to MATLAB January (IAP) 2009
 2009") MIT OpenCourseWare http://ocw.mit.edu 6.094 Introduction to MATLAB January (IAP) 2009 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. 6.094: Introduction
MIT OpenCourseWare http://ocw.mit.edu 6.094 Introduction to MATLAB January (IAP) 2009 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. 6.094: Introduction
CAP 5415 Computer Vision Fall 2011
 CAP 545 Computer Vision Fall 2 Dr. Mubarak Sa Univ. o Central Florida www.cs.uc.edu/~vision/courses/cap545/all22 Oice 247-F HEC Filtering Lecture-2 General Binary Gray Scale Color Binary Images Y Row X
CAP 545 Computer Vision Fall 2 Dr. Mubarak Sa Univ. o Central Florida www.cs.uc.edu/~vision/courses/cap545/all22 Oice 247-F HEC Filtering Lecture-2 General Binary Gray Scale Color Binary Images Y Row X
Computer Vision Lecture 3
 Computer Vision Lecture 3 Linear Filters 03.11.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Demo Haribo Classification Code available on the class website...
Computer Vision Lecture 3 Linear Filters 03.11.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Demo Haribo Classification Code available on the class website...
Problem 1. Suppose we calculate the response of an LTI system to an input signal x(n), using the convolution sum:
, using the convolution sum:") EE 438 Homework 4. Corrections in Problems 2(a)(iii) and (iv) and Problem 3(c): Sunday, 9/9, 10pm. EW DUE DATE: Monday, Sept 17 at 5pm (you see, that suggestion box does work!) Problem 1. Suppose we calculate
EE 438 Homework 4. Corrections in Problems 2(a)(iii) and (iv) and Problem 3(c): Sunday, 9/9, 10pm. EW DUE DATE: Monday, Sept 17 at 5pm (you see, that suggestion box does work!) Problem 1. Suppose we calculate
CAP 5415 Computer Vision
 CAP 545 Computer Vision Dr. Mubarak Sa Univ. o Central Florida Filtering Lecture-2 Contents Filtering/Smooting/Removing Noise Convolution/Correlation Image Derivatives Histogram Some Matlab Functions General
CAP 545 Computer Vision Dr. Mubarak Sa Univ. o Central Florida Filtering Lecture-2 Contents Filtering/Smooting/Removing Noise Convolution/Correlation Image Derivatives Histogram Some Matlab Functions General
Lecture 3: Linear Filters
 Lecture 3: Linear Filters Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Images as functions Linear systems (filters) Convolution and correlation Discrete Fourier Transform (DFT)
Lecture 3: Linear Filters Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Images as functions Linear systems (filters) Convolution and correlation Discrete Fourier Transform (DFT)
(9) Morphological Image Processing (a) Basic set operations
 Morphological Image Processing (a) Basic set operations") (9) Morphological Image Processing - Morphology A branch of biology that deals with the form and structure of animals and plants - Mathematical morphology A tool to extract image components for representing
(9) Morphological Image Processing - Morphology A branch of biology that deals with the form and structure of animals and plants - Mathematical morphology A tool to extract image components for representing
Histogram Processing
 Histogram Processing The histogram of a digital image with gray levels in the range [0,L-] is a discrete function h ( r k ) = n k where r k n k = k th gray level = number of pixels in the image having
Histogram Processing The histogram of a digital image with gray levels in the range [0,L-] is a discrete function h ( r k ) = n k where r k n k = k th gray level = number of pixels in the image having
Face recognition Computer Vision Spring 2018, Lecture 21
 Face recognition http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 21 Course announcements Homework 6 has been posted and is due on April 27 th. - Any questions about the homework?
Face recognition http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 21 Course announcements Homework 6 has been posted and is due on April 27 th. - Any questions about the homework?
Adaptive Systems Homework Assignment 1
 Signal Processing and Speech Communication Lab. Graz University of Technology Adaptive Systems Homework Assignment 1 Name(s) Matr.No(s). The analytical part of your homework (your calculation sheets) as
Signal Processing and Speech Communication Lab. Graz University of Technology Adaptive Systems Homework Assignment 1 Name(s) Matr.No(s). The analytical part of your homework (your calculation sheets) as
Machine Learning: Homework 5
 0-60 Machine Learning: Homework 5 Due 5:0 p.m. Thursday, March, 06 TAs: Travis Dick and Han Zhao Instructions Late homework policy: Homework is worth full credit if submitted before the due date, half
0-60 Machine Learning: Homework 5 Due 5:0 p.m. Thursday, March, 06 TAs: Travis Dick and Han Zhao Instructions Late homework policy: Homework is worth full credit if submitted before the due date, half
2D Image Processing Face Detection and Recognition
 2D Image Processing Face Detection and Recognition Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
2D Image Processing Face Detection and Recognition Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
Main matrix factorizations
 Main matrix factorizations A P L U P permutation matrix, L lower triangular, U upper triangular Key use: Solve square linear system Ax b. A Q R Q unitary, R upper triangular Key use: Solve square or overdetrmined
Main matrix factorizations A P L U P permutation matrix, L lower triangular, U upper triangular Key use: Solve square linear system Ax b. A Q R Q unitary, R upper triangular Key use: Solve square or overdetrmined
Lecture 3: Linear Filters
 Lecture 3: Linear Filters Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Images as functions Linear systems (filters) Convolution and correlation Discrete Fourier Transform (DFT)
Lecture 3: Linear Filters Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Images as functions Linear systems (filters) Convolution and correlation Discrete Fourier Transform (DFT)
1 A Support Vector Machine without Support Vectors
 CS/CNS/EE 53 Advanced Topics in Machine Learning Problem Set 1 Handed out: 15 Jan 010 Due: 01 Feb 010 1 A Support Vector Machine without Support Vectors In this question, you ll be implementing an online
CS/CNS/EE 53 Advanced Topics in Machine Learning Problem Set 1 Handed out: 15 Jan 010 Due: 01 Feb 010 1 A Support Vector Machine without Support Vectors In this question, you ll be implementing an online
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely Lecture 5: Feature descriptors and matching Szeliski: 4.1 Reading Announcements Project 1 Artifacts due tomorrow, Friday 2/17, at 11:59pm Project 2 will be released
CS5670: Computer Vision Noah Snavely Lecture 5: Feature descriptors and matching Szeliski: 4.1 Reading Announcements Project 1 Artifacts due tomorrow, Friday 2/17, at 11:59pm Project 2 will be released
Instance-level recognition: Local invariant features. Cordelia Schmid INRIA, Grenoble
 nstance-level recognition: ocal invariant features Cordelia Schmid NRA Grenoble Overview ntroduction to local features Harris interest points + SSD ZNCC SFT Scale & affine invariant interest point detectors
nstance-level recognition: ocal invariant features Cordelia Schmid NRA Grenoble Overview ntroduction to local features Harris interest points + SSD ZNCC SFT Scale & affine invariant interest point detectors
Linear Classifiers. Michael Collins. January 18, 2012
 Linear Classifiers Michael Collins January 18, 2012 Today s Lecture Binary classification problems Linear classifiers The perceptron algorithm Classification Problems: An Example Goal: build a system that
Linear Classifiers Michael Collins January 18, 2012 Today s Lecture Binary classification problems Linear classifiers The perceptron algorithm Classification Problems: An Example Goal: build a system that
Principal Component Analysis -- PCA (also called Karhunen-Loeve transformation)
") Principal Component Analysis -- PCA (also called Karhunen-Loeve transformation) PCA transforms the original input space into a lower dimensional space, by constructing dimensions that are linear combinations
Principal Component Analysis -- PCA (also called Karhunen-Loeve transformation) PCA transforms the original input space into a lower dimensional space, by constructing dimensions that are linear combinations
Designing Information Devices and Systems I Spring 2018 Homework 13
 EECS 16A Designing Information Devices and Systems I Spring 2018 Homework 13 This homework is due April 30, 2018, at 23:59. Self-grades are due May 3, 2018, at 23:59. Submission Format Your homework submission
EECS 16A Designing Information Devices and Systems I Spring 2018 Homework 13 This homework is due April 30, 2018, at 23:59. Self-grades are due May 3, 2018, at 23:59. Submission Format Your homework submission
Digital Image Processing. Filtering in the Frequency Domain
 2D Linear Systems 2D Fourier Transform and its Properties The Basics of Filtering in Frequency Domain Image Smoothing Image Sharpening Selective Filtering Implementation Tips 1 General Definition: System
2D Linear Systems 2D Fourier Transform and its Properties The Basics of Filtering in Frequency Domain Image Smoothing Image Sharpening Selective Filtering Implementation Tips 1 General Definition: System
Lecture 13 Visual recognition
 Lecture 13 Visual recognition Announcements Silvio Savarese Lecture 13-20-Feb-14 Lecture 13 Visual recognition Object classification bag of words models Discriminative methods Generative methods Object
Lecture 13 Visual recognition Announcements Silvio Savarese Lecture 13-20-Feb-14 Lecture 13 Visual recognition Object classification bag of words models Discriminative methods Generative methods Object
LAB 6: FIR Filter Design Summer 2011
 University of Illinois at Urbana-Champaign Department of Electrical and Computer Engineering ECE 311: Digital Signal Processing Lab Chandra Radhakrishnan Peter Kairouz LAB 6: FIR Filter Design Summer 011
University of Illinois at Urbana-Champaign Department of Electrical and Computer Engineering ECE 311: Digital Signal Processing Lab Chandra Radhakrishnan Peter Kairouz LAB 6: FIR Filter Design Summer 011
CS4495/6495 Introduction to Computer Vision. 2A-L6 Edge detection: 2D operators
 CS4495/6495 Introduction to Computer Vision 2A-L6 Edge detection: 2D operators Derivative theorem of convolution - 1D This saves us one operation: ( ) ( ) x h f h f x f h h x h x ( ) f Derivative of Gaussian
CS4495/6495 Introduction to Computer Vision 2A-L6 Edge detection: 2D operators Derivative theorem of convolution - 1D This saves us one operation: ( ) ( ) x h f h f x f h h x h x ( ) f Derivative of Gaussian
Dimensionality Reduction Using PCA/LDA. Hongyu Li School of Software Engineering TongJi University Fall, 2014
 Dimensionality Reduction Using PCA/LDA Hongyu Li School of Software Engineering TongJi University Fall, 2014 Dimensionality Reduction One approach to deal with high dimensional data is by reducing their
Dimensionality Reduction Using PCA/LDA Hongyu Li School of Software Engineering TongJi University Fall, 2014 Dimensionality Reduction One approach to deal with high dimensional data is by reducing their
System 1 (last lecture) : limited to rigidly structured shapes. System 2 : recognition of a class of varying shapes. Need to:
 : limited to rigidly structured shapes. System 2 : recognition of a class of varying shapes. Need to:") System 2 : Modelling & Recognising Modelling and Recognising Classes of Classes of Shapes Shape : PDM & PCA All the same shape? System 1 (last lecture) : limited to rigidly structured shapes System 2 :
System 2 : Modelling & Recognising Modelling and Recognising Classes of Classes of Shapes Shape : PDM & PCA All the same shape? System 1 (last lecture) : limited to rigidly structured shapes System 2 :
Introduction to Mathematical Programming
 Introduction to Mathematical Programming Ming Zhong Lecture 25 November 5, 2018 Ming Zhong (JHU) AMS Fall 2018 1 / 19 Table of Contents 1 Ming Zhong (JHU) AMS Fall 2018 2 / 19 Some Preliminaries: Fourier
Introduction to Mathematical Programming Ming Zhong Lecture 25 November 5, 2018 Ming Zhong (JHU) AMS Fall 2018 1 / 19 Table of Contents 1 Ming Zhong (JHU) AMS Fall 2018 2 / 19 Some Preliminaries: Fourier
Laboratory handout 1 Mathematical preliminaries
 laboratory handouts, me 340 2 Laboratory handout 1 Mathematical preliminaries In this handout, an expression on the left of the symbol := is defined in terms of the expression on the right. In contrast,
laboratory handouts, me 340 2 Laboratory handout 1 Mathematical preliminaries In this handout, an expression on the left of the symbol := is defined in terms of the expression on the right. In contrast,