Image Segmentation: Definition Importance. Digital Image Processing, 2nd ed. Chapter 10 Image Segmentation.
|
|
|
- Magnus Robinson
- 6 years ago
- Views:
Transcription
1 : Definition Importance
2 Detection of Discontinuities: 9 R = wi z i= 1 i

3 Point Detection: 1. A Mask 2. Thresholding R T
4 Line Detection: A Suitable Mask in desired direction Thresholding Line i : R R, j i j

5 Example: -45º Mask Thresholding
6 Edge Detection: Two Mathematical model
7 f x 2 f 2 x
 N ( 0,0.")
8 Noise Problem: f f x 2 f 2 x N ( 0,0) N ( 0,0.1) N ( 0,1) N ( 0,10)
9 Gradient Operators: f Gx x f = G = f y y 2 2 f f f f f = + + x y x y α ( x y), tan G 1 y = Gx 1 2
10 Gradient Operators: Roberts Cross Gradients: x ( ) ( ) G = z z G = z z 9 5 y 8 6 ( ) ( ) 2 2 f z9 z5 + z8 z 6 f z z + z z Roberts Cross Gradient : Prewitt Operators: y ( ) ( ) ( ) ( ) 1 2 ( 2 ) ( 2 ) ( 2 ) ( 2 ) Gx = z + z + z z + z + z G = z + z + z z + z + z G = z + z + z z + z + z G = z + z + z z + z + z variation x y
11 Gradients Operators Y-Direction X-Direction
12 Diagonal Edge 45-Direction -45-Direction

13 Original G x G Gx + Gy y

14 Pre- Smoothing 5 5 Original G x G x y y G + G

15 º and -45º lines
16 Laplacian as an isotropic Detector: f x f y f = Discrete Implementation: 2 4N's: f = 4z5 ( z2 + z4 + z6 + z8 ) 2 8N's: f = 4z ( z + z + z + z + z + z + z + z )
 = exp 4 2 σ")
17 Laplacian of Gaussian (LoG): 2 r h( r) = exp 2 2σ r σ r h( r) = exp 4 2 σ 2σ

18 Original Sobel GLPF Laplacian LoG LoG>T ZC Zero Crossing: Thinner Edge Easy to compute Noise Reduction capability Spaghetti Effect (isolated circles)
 f x y f x y E α x y x y A 0 0 Input G y G x")
19 Edge Linking (Local Processing) (, ) ( 0, 0 ) (, ) α (, ) f x y f x y E α x y x y A 0 0 Input G y G x Results
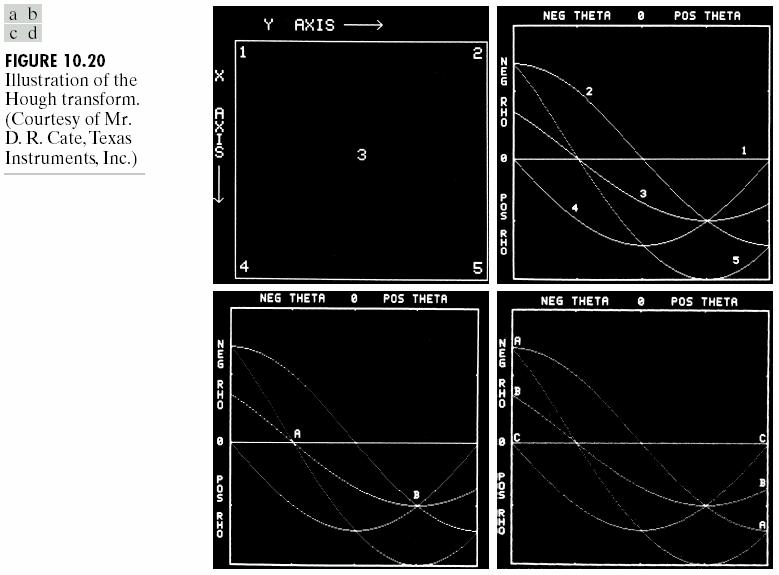
20 Global Edge Linking by the Hough Transform: ( ) x, y & y = ax + b y = ax + b i i i i b = x a + y i i ( x y ) ( ) All, 's on a line intersect each other at a,b i i
21 Hough Transform in Cartesian ( a,b ) ( x,y ) 1 1 ( x,y ) 2 2 ( x,y ) 4 4 ( x,y ) 3 3
22 Hough Transform in Polar Problem with Vertical line (a= ) ( xi, yi ) & x cos + y sin = xi cos + yi sin = ( ρi, θi ) All ( x, y )'s on a sin intersect each other at ( ρ, θ ) θ θ ρ θ θ ρ i i i i
23

24 Hough Transform
25 Hough Transform for circle: ( xi, yi ) & ( x p1 ) + ( y p2 ) = p3 ( xi p1 ) + ( yi p2 ) = p3 All ( x, y )'s on a spherical surface intersect each other at ( p, p, p ) i i Extract each circle (independent of radius): xi = p1 + r cosθ p1 = xi r cosθ p2 = p1 tanθ xi tanθ + y yi = p2 + r sinθ p2 = yi r sinθ i


26 Hough Transform for circle:

27 Hough Transform for circle:
28 Hough Transform Implementation: Discrete Accumulator Smoothing Find Local Maxima

29 Original Thr-Grad. H-T Linked
30 Thresholding: F(x,y)>T then (x,y) is belong to object, else (x,y) is belong to background. Bi-level (T) Multi-level (T 1,T 2,, T n ) Threshold image: 1 f x, y > T g ( x, y) = 0 f ( x, y) T Threshold Estimation : Histogram ( )
31 Thresholds
 r ( ) P r i ( x, y) Broadness Homomorphic Process i ( x, y) r ( x, y) Pf ( f")
32 Role of illumination (, ) = (, ) (, ) f x y i x y r x y Histogram Distortion (, ) = (, ) (, ) (, ) = ln (, ) (, ) = (, ) + (, ) f x y i x y r x y z x y f x y z x y i x y r x y r ( x, y) r ( ) P r i ( x, y) Broadness Homomorphic Process i ( x, y) r ( x, y) Pf ( f )

33 Basic Global Thresholding: T = MAX + 2 min
34 How to select T: A Heuristic approach: 1. Initial guess on T 2. Segment image to G 1 (>T) and G 2 ( T) 3. Compute average value of G 1 (Ψ 1 ) and G 2 (Ψ 2 ) 4. Set T be average of Ψ 1 and Ψ 2 5. Repeat 2-4 until small changed in successive T values.

35 Convergence T0 = 0 T f = 125.4
36 Adaptive Thresholding: Local Thresholding: Subdivide the images into smaller block. Optimal Global Thresholding: Determine best value when no evidence valley.

37 Global Thr. Mosaic Local Thr.

38 Sub-image selection effect Good Subimage Bad Subimage Further block-ing
39 Optimal Global-Adaptive Thresholding: Gaussian Histogram ( ) ( z µ ) ( z µ ) σ 2 2σ 2 1 exp 2 exp P z = P + P 2 AT + BT + C = A = σ σ for σ B = 2 Pσ C = σ µ σ µ + 2σ σ ln ( µ 1σ 2 µ 2σ 1 ) P2 σ1 µ + µ σ P = = σ 2 T ln 2 µ 1 µ 2 P2
40 Optimal Global-Adaptive Thresholding: Histogram Modeling ( ) = ( ) + ( ) p z P p z P p z P + P = min T T ( ) + ( ) P p z dz P p z dz T ( ) ( ) P p T = P p T
 Image summation in order to reduce noise.")
41 Example: Preprocessing Log function( radiological absorption) Digital Subtraction (Pre and Post images) Image summation in order to reduce noise. Before After
42 Example: Optimal Thresholding: Subdivide images to 7 7 sub-block (50% overlap) Histogram Estimation Test of bimodality and Gaussian fitting and Bimodal Unimodal

43 Example: Thresholding Segmentation Boundary Detection Superimposing
44 How to improve the former methods: Consider pixels near boundary for histogram. Use of gradient/laplacian to estimate boundary: 0 f < T 2 S ( x, y) = + 1 f T and f 0 < 0: Not on Edge +1:Dark side of edge -1: Bright side of edge 2 1 f T and f 0
45 Example:

46 S(x,y) with T=midpoint Histogram of Gradient (Those with G>5)
 Facial tones RED")
47 Segmentation with Multiple Variables: RGB/Multi-Channel data Cluster of point in 3D Original (Color) Facial tones RED channel
48 Region Based Segmentation: n R i= 1 i R are connected regions. i R R =, i j i ( ) P R = i ( ) i Rj j TRUE P R = FALSE
49 Region Growing: Select a start (seed) point Grow the point based on a certain property Connectivity should be considered. Seed point selection: Handy Highlighted point (Due to specific property)
50 Region Growing:
51 Region Growing (Example): Determine seed points to maximum gray level. Growing criteria: Gray level value difference (with respect to S.P.) less than a threshold. Each candidate pixel should be N 8 of region.
")
52 Region Growing: Seed Point High Value (255) Points
53 Multimodal Histogram Threshold
54 Splitting and Merging: Define a criteria for each region to be a valid segment. Split each region which is not satisfy the criteria. Merge two neighbor region based on criteria.
55 Splitting and Merging

56 Splitting-Merging Algorithm Criteria: 80% of all pixels satisfy: z m 2σ j i i
57
58
59
60
61
62
63 The Use of Motion in Segmentation: Spatial Domain Frequency Domain Spatial Domain: Main idea: Compare pixel by pixel (difference) d ij ( x, y) ( ) ( ) Dynamic Objec 1 f x, y, ti f x, y, t j > T = 0 O.W. Static Object t
64 Accumulative Difference Image (ADI): n (,, ) f ( x, y, t1 ) { } 1 Consider f x y t i and as reference i= frame. ADI compare reference frame with incoming frame. Increment counter of each pixel when a difference detected. ADI alternative: Absolute Positive Negative
65 Accumulative Difference Image (ADI): A P k k N k ( x, y) ( x, y) ( x, y) (, ) 1 (,, ) (,, k ) ( x, y) O.W. Ak 1 x y + f x y t1 f x y t > T = Ak 1 (, ) 1 (,, ) (,, k ) ( x, y) O.W. Pk 1 x y + f x y t1 f x y t > T = Pk 1 (, ) 1 (,, ) (,, k ) ( x, y) O.W. Nk 1 x y + f x y t1 f x y t < T = Nk 1

66 ADI Example Absolute Positive Negative

67 Establishing a Reference Images: Difference will erase static object: When a dynamic object move out completely from its position, the back ground in replaced.
68 Frequency Domain Methods: A Static/black background A Dynamic single pixel x y M 1 N 1 ( ) ( ) g t a f x y t e t K j2π a1x t, =,,, = 0,1,2,, 1 1 x= 0 y= 0 N 1 M 1 ( ) ( ) g t a f x y t e t K j2π a2 y t, =,,, = 0,1, 2,, 1 2 y= 0 x= 0 K 1 1 G u a g t a e u K x ( ) ( ) j2 πu1t / K, =,, = 0,1, 2,, x 1 1 K t= 0 1 G u a g t a e u K 1 ( ) ( ) j2 πu2t / K, =,, = 0,1 y 2 1 y y 2 K t= 0 u = a v, u = a v , 2,, K 1

69 An Example:

70 Intensity Plot
71
72
Edge Detection. Image Processing - Computer Vision
 Image Processing - Lesson 10 Edge Detection Image Processing - Computer Vision Low Level Edge detection masks Gradient Detectors Compass Detectors Second Derivative - Laplace detectors Edge Linking Image
Image Processing - Lesson 10 Edge Detection Image Processing - Computer Vision Low Level Edge detection masks Gradient Detectors Compass Detectors Second Derivative - Laplace detectors Edge Linking Image
Lecture 7: Edge Detection
 #1 Lecture 7: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Definition of an Edge First Order Derivative Approximation as Edge Detector #2 This Lecture Examples of Edge Detection
#1 Lecture 7: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Definition of an Edge First Order Derivative Approximation as Edge Detector #2 This Lecture Examples of Edge Detection
Machine vision. Summary # 4. The mask for Laplacian is given
 1 Machine vision Summary # 4 The mask for Laplacian is given L = 0 1 0 1 4 1 (6) 0 1 0 Another Laplacian mask that gives more importance to the center element is L = 1 1 1 1 8 1 (7) 1 1 1 Note that the
1 Machine vision Summary # 4 The mask for Laplacian is given L = 0 1 0 1 4 1 (6) 0 1 0 Another Laplacian mask that gives more importance to the center element is L = 1 1 1 1 8 1 (7) 1 1 1 Note that the
Image Enhancement: Methods. Digital Image Processing. No Explicit definition. Spatial Domain: Frequency Domain:
 Image Enhancement: No Explicit definition Methods Spatial Domain: Linear Nonlinear Frequency Domain: Linear Nonlinear 1 Spatial Domain Process,, g x y T f x y 2 For 1 1 neighborhood: Contrast Enhancement/Stretching/Point
Image Enhancement: No Explicit definition Methods Spatial Domain: Linear Nonlinear Frequency Domain: Linear Nonlinear 1 Spatial Domain Process,, g x y T f x y 2 For 1 1 neighborhood: Contrast Enhancement/Stretching/Point
Edge Detection. Introduction to Computer Vision. Useful Mathematics Funcs. The bad news
 Edge Detection Introduction to Computer Vision CS / ECE 8B Thursday, April, 004 Edge detection (HO #5) Edge detection is a local area operator that seeks to find significant, meaningful changes in image
Edge Detection Introduction to Computer Vision CS / ECE 8B Thursday, April, 004 Edge detection (HO #5) Edge detection is a local area operator that seeks to find significant, meaningful changes in image
Machine vision, spring 2018 Summary 4
 Machine vision Summary # 4 The mask for Laplacian is given L = 4 (6) Another Laplacian mask that gives more importance to the center element is given by L = 8 (7) Note that the sum of the elements in the
Machine vision Summary # 4 The mask for Laplacian is given L = 4 (6) Another Laplacian mask that gives more importance to the center element is given by L = 8 (7) Note that the sum of the elements in the
Biomedical Image Analysis. Segmentation by Thresholding
 Biomedical Image Analysis Segmentation by Thresholding Contents: Thresholding principles Ridler & Calvard s method Ridler TW, Calvard S (1978). Picture thresholding using an iterative selection method,
Biomedical Image Analysis Segmentation by Thresholding Contents: Thresholding principles Ridler & Calvard s method Ridler TW, Calvard S (1978). Picture thresholding using an iterative selection method,
Filtering and Edge Detection
 Filtering and Edge Detection Local Neighborhoods Hard to tell anything from a single pixel Example: you see a reddish pixel. Is this the object s color? Illumination? Noise? The next step in order of complexity
Filtering and Edge Detection Local Neighborhoods Hard to tell anything from a single pixel Example: you see a reddish pixel. Is this the object s color? Illumination? Noise? The next step in order of complexity
Corner. Corners are the intersections of two edges of sufficiently different orientations.
 2D Image Features Two dimensional image features are interesting local structures. They include junctions of different types like Y, T, X, and L. Much of the work on 2D features focuses on junction L,
2D Image Features Two dimensional image features are interesting local structures. They include junctions of different types like Y, T, X, and L. Much of the work on 2D features focuses on junction L,
Created by T. Madas VECTOR OPERATORS. Created by T. Madas
 VECTOR OPERATORS GRADIENT gradϕ ϕ Question 1 A surface S is given by the Cartesian equation x 2 2 + y = 25. a) Draw a sketch of S, and describe it geometrically. b) Determine an equation of the tangent
VECTOR OPERATORS GRADIENT gradϕ ϕ Question 1 A surface S is given by the Cartesian equation x 2 2 + y = 25. a) Draw a sketch of S, and describe it geometrically. b) Determine an equation of the tangent
Master of Intelligent Systems - French-Czech Double Diploma. Hough transform
 Hough transform I- Introduction The Hough transform is used to isolate features of a particular shape within an image. Because it requires that the desired features be specified in some parametric form,
Hough transform I- Introduction The Hough transform is used to isolate features of a particular shape within an image. Because it requires that the desired features be specified in some parametric form,
Created by T. Madas LINE INTEGRALS. Created by T. Madas
 LINE INTEGRALS LINE INTEGRALS IN 2 DIMENSIONAL CARTESIAN COORDINATES Question 1 Evaluate the integral ( x + 2y) dx, C where C is the path along the curve with equation y 2 = x + 1, from ( ) 0,1 to ( )
LINE INTEGRALS LINE INTEGRALS IN 2 DIMENSIONAL CARTESIAN COORDINATES Question 1 Evaluate the integral ( x + 2y) dx, C where C is the path along the curve with equation y 2 = x + 1, from ( ) 0,1 to ( )
EECS490: Digital Image Processing. Lecture #11
 Lecture #11 Filtering Applications: OCR, scanning Highpass filters Laplacian in the frequency domain Image enhancement using highpass filters Homomorphic filters Bandreject/bandpass/notch filters Correlation
Lecture #11 Filtering Applications: OCR, scanning Highpass filters Laplacian in the frequency domain Image enhancement using highpass filters Homomorphic filters Bandreject/bandpass/notch filters Correlation
Slide a window along the input arc sequence S. Least-squares estimate. σ 2. σ Estimate 1. Statistically test the difference between θ 1 and θ 2
 Corner Detection 2D Image Features Corners are important two dimensional features. Two dimensional image features are interesting local structures. They include junctions of dierent types Slide 3 They
Corner Detection 2D Image Features Corners are important two dimensional features. Two dimensional image features are interesting local structures. They include junctions of dierent types Slide 3 They
Feature Extraction Line & Curve
 Feature Extraction Line & Curve 2/25/11 ECEn 631 Standard Procedure Locate edges within the image Link broken edges Thin thick edges For every edge pixel, find possible parameters Locate all clusters of
Feature Extraction Line & Curve 2/25/11 ECEn 631 Standard Procedure Locate edges within the image Link broken edges Thin thick edges For every edge pixel, find possible parameters Locate all clusters of
Laplacian Filters. Sobel Filters. Laplacian Filters. Laplacian Filters. Laplacian Filters. Laplacian Filters
 Sobel Filters Note that smoothing the image before applying a Sobel filter typically gives better results. Even thresholding the Sobel filtered image cannot usually create precise, i.e., -pixel wide, edges.
Sobel Filters Note that smoothing the image before applying a Sobel filter typically gives better results. Even thresholding the Sobel filtered image cannot usually create precise, i.e., -pixel wide, edges.
Intensity Transformations and Spatial Filtering: WHICH ONE LOOKS BETTER? Intensity Transformations and Spatial Filtering: WHICH ONE LOOKS BETTER?
 : WHICH ONE LOOKS BETTER? 3.1 : WHICH ONE LOOKS BETTER? 3.2 1 Goal: Image enhancement seeks to improve the visual appearance of an image, or convert it to a form suited for analysis by a human or a machine.
: WHICH ONE LOOKS BETTER? 3.1 : WHICH ONE LOOKS BETTER? 3.2 1 Goal: Image enhancement seeks to improve the visual appearance of an image, or convert it to a form suited for analysis by a human or a machine.
Basics on 2-D 2 D Random Signal
 Basics on -D D Random Signal Spring 06 Instructor: K. J. Ray Liu ECE Department, Univ. of Maryland, College Park Overview Last Time: Fourier Analysis for -D signals Image enhancement via spatial filtering
Basics on -D D Random Signal Spring 06 Instructor: K. J. Ray Liu ECE Department, Univ. of Maryland, College Park Overview Last Time: Fourier Analysis for -D signals Image enhancement via spatial filtering
Local enhancement. Local Enhancement. Local histogram equalized. Histogram equalized. Local Contrast Enhancement. Fig 3.23: Another example
 Local enhancement Local Enhancement Median filtering Local Enhancement Sometimes Local Enhancement is Preferred. Malab: BlkProc operation for block processing. Left: original tire image. 0/07/00 Local
Local enhancement Local Enhancement Median filtering Local Enhancement Sometimes Local Enhancement is Preferred. Malab: BlkProc operation for block processing. Left: original tire image. 0/07/00 Local
Edge Detection. CS 650: Computer Vision
 CS 650: Computer Vision Edges and Gradients Edge: local indication of an object transition Edge detection: local operators that find edges (usually involves convolution) Local intensity transitions are
CS 650: Computer Vision Edges and Gradients Edge: local indication of an object transition Edge detection: local operators that find edges (usually involves convolution) Local intensity transitions are
Local Enhancement. Local enhancement
 Local Enhancement Local Enhancement Median filtering (see notes/slides, 3.5.2) HW4 due next Wednesday Required Reading: Sections 3.3, 3.4, 3.5, 3.6, 3.7 Local Enhancement 1 Local enhancement Sometimes
Local Enhancement Local Enhancement Median filtering (see notes/slides, 3.5.2) HW4 due next Wednesday Required Reading: Sections 3.3, 3.4, 3.5, 3.6, 3.7 Local Enhancement 1 Local enhancement Sometimes
Roadmap. Introduction to image analysis (computer vision) Theory of edge detection. Applications
 Theory of edge detection. Applications") Edge Detection Roadmap Introduction to image analysis (computer vision) Its connection with psychology and neuroscience Why is image analysis difficult? Theory of edge detection Gradient operator Advanced
Edge Detection Roadmap Introduction to image analysis (computer vision) Its connection with psychology and neuroscience Why is image analysis difficult? Theory of edge detection Gradient operator Advanced
TRACKING and DETECTION in COMPUTER VISION Filtering and edge detection
 Technischen Universität München Winter Semester 0/0 TRACKING and DETECTION in COMPUTER VISION Filtering and edge detection Slobodan Ilić Overview Image formation Convolution Non-liner filtering: Median
Technischen Universität München Winter Semester 0/0 TRACKING and DETECTION in COMPUTER VISION Filtering and edge detection Slobodan Ilić Overview Image formation Convolution Non-liner filtering: Median
Computer Vision & Digital Image Processing
 Computer Vision & Digital Image Processing Image Segmentation Dr. D. J. Jackson Lecture 6- Image segmentation Segmentation divides an image into its constituent parts or objects Level of subdivision depends
Computer Vision & Digital Image Processing Image Segmentation Dr. D. J. Jackson Lecture 6- Image segmentation Segmentation divides an image into its constituent parts or objects Level of subdivision depends
Representing regions in 2 ways:
 Representing regions in 2 ways: Based on their external characteristics (its boundary): Shape characteristics Based on their internal characteristics (its region): Both Regional properties: color, texture,
Representing regions in 2 ways: Based on their external characteristics (its boundary): Shape characteristics Based on their internal characteristics (its region): Both Regional properties: color, texture,
Lecture 8: Interest Point Detection. Saad J Bedros
 #1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Last Lecture : Edge Detection Preprocessing of image is desired to eliminate or at least minimize noise effects There is always tradeoff
#1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Last Lecture : Edge Detection Preprocessing of image is desired to eliminate or at least minimize noise effects There is always tradeoff
Mathematics Trigonometry: Unit Circle
 a place of mind F A C U L T Y O F E D U C A T I O N Department of Curriculum and Pedagog Mathematics Trigonometr: Unit Circle Science and Mathematics Education Research Group Supported b UBC Teaching and
a place of mind F A C U L T Y O F E D U C A T I O N Department of Curriculum and Pedagog Mathematics Trigonometr: Unit Circle Science and Mathematics Education Research Group Supported b UBC Teaching and
Problem Session #5. EE368/CS232 Digital Image Processing
 Problem Session #5 EE368/CS232 Digital Image Processing 1. Solving a Jigsaw Puzzle Please download the image hw5_puzzle_pieces.jpg from the handouts webpage, which shows the pieces of a jigsaw puzzle.
Problem Session #5 EE368/CS232 Digital Image Processing 1. Solving a Jigsaw Puzzle Please download the image hw5_puzzle_pieces.jpg from the handouts webpage, which shows the pieces of a jigsaw puzzle.
CS 4495 Computer Vision Binary images and Morphology
 CS 4495 Computer Vision Binary images and Aaron Bobick School of Interactive Computing Administrivia PS6 should be working on it! Due Sunday Nov 24 th. Some issues with reading frames. Resolved? Exam:
CS 4495 Computer Vision Binary images and Aaron Bobick School of Interactive Computing Administrivia PS6 should be working on it! Due Sunday Nov 24 th. Some issues with reading frames. Resolved? Exam:
Edge Detection in Computer Vision Systems
 1 CS332 Visual Processing in Computer and Biological Vision Systems Edge Detection in Computer Vision Systems This handout summarizes much of the material on the detection and description of intensity
1 CS332 Visual Processing in Computer and Biological Vision Systems Edge Detection in Computer Vision Systems This handout summarizes much of the material on the detection and description of intensity
AOL Spring Wavefront Sensing. Figure 1: Principle of operation of the Shack-Hartmann wavefront sensor
 AOL Spring Wavefront Sensing The Shack Hartmann Wavefront Sensor system provides accurate, high-speed measurements of the wavefront shape and intensity distribution of beams by analyzing the location and
AOL Spring Wavefront Sensing The Shack Hartmann Wavefront Sensor system provides accurate, high-speed measurements of the wavefront shape and intensity distribution of beams by analyzing the location and
Corner detection: the basic idea
 Corner detection: the basic idea At a corner, shifting a window in any direction should give a large change in intensity flat region: no change in all directions edge : no change along the edge direction
Corner detection: the basic idea At a corner, shifting a window in any direction should give a large change in intensity flat region: no change in all directions edge : no change along the edge direction
Morphological image processing
 INF 4300 Digital Image Analysis Morphological image processing Fritz Albregtsen 09.11.2017 1 Today Gonzalez and Woods, Chapter 9 Except sections 9.5.7 (skeletons), 9.5.8 (pruning), 9.5.9 (reconstruction)
INF 4300 Digital Image Analysis Morphological image processing Fritz Albregtsen 09.11.2017 1 Today Gonzalez and Woods, Chapter 9 Except sections 9.5.7 (skeletons), 9.5.8 (pruning), 9.5.9 (reconstruction)
CHAPTER 4 Stress Transformation
 CHAPTER 4 Stress Transformation ANALYSIS OF STRESS For this topic, the stresses to be considered are not on the perpendicular and parallel planes only but also on other inclined planes. A P a a b b P z
CHAPTER 4 Stress Transformation ANALYSIS OF STRESS For this topic, the stresses to be considered are not on the perpendicular and parallel planes only but also on other inclined planes. A P a a b b P z
ECE Digital Image Processing and Introduction to Computer Vision. Outline
 2/9/7 ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 207. Recap Outline 2. Sharpening Filtering Illustration
2/9/7 ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 207. Recap Outline 2. Sharpening Filtering Illustration
Chapter 4 Image Enhancement in the Frequency Domain
 Chapter 4 Image Enhancement in the Frequency Domain Yinghua He School of Computer Science and Technology Tianjin University Background Introduction to the Fourier Transform and the Frequency Domain Smoothing
Chapter 4 Image Enhancement in the Frequency Domain Yinghua He School of Computer Science and Technology Tianjin University Background Introduction to the Fourier Transform and the Frequency Domain Smoothing
If you must be wrong, how little wrong can you be?
 MATH 2411 - Harrell If you must be wrong, how little wrong can you be? Lecture 13 Copyright 2013 by Evans M. Harrell II. About the test Median was 35, range 25 to 40. As it is written: About the test Percentiles:
MATH 2411 - Harrell If you must be wrong, how little wrong can you be? Lecture 13 Copyright 2013 by Evans M. Harrell II. About the test Median was 35, range 25 to 40. As it is written: About the test Percentiles:
Scalar & Vector tutorial
 Scalar & Vector tutorial scalar vector only magnitude, no direction both magnitude and direction 1-dimensional measurement of quantity not 1-dimensional time, mass, volume, speed temperature and so on
Scalar & Vector tutorial scalar vector only magnitude, no direction both magnitude and direction 1-dimensional measurement of quantity not 1-dimensional time, mass, volume, speed temperature and so on
Image Gradients and Gradient Filtering Computer Vision
 Image Gradients and Gradient Filtering 16-385 Computer Vision What is an image edge? Recall that an image is a 2D function f(x) edge edge How would you detect an edge? What kinds of filter would you use?
Image Gradients and Gradient Filtering 16-385 Computer Vision What is an image edge? Recall that an image is a 2D function f(x) edge edge How would you detect an edge? What kinds of filter would you use?
Edge Detection. Computer Vision P. Schrater Spring 2003
 Edge Detection Computer Vision P. Schrater Spring 2003 Simplest Model: (Canny) Edge(x) = a U(x) + n(x) U(x)? x=0 Convolve image with U and find points with high magnitude. Choose value by comparing with
Edge Detection Computer Vision P. Schrater Spring 2003 Simplest Model: (Canny) Edge(x) = a U(x) + n(x) U(x)? x=0 Convolve image with U and find points with high magnitude. Choose value by comparing with
Strain analysis.
 Strain analysis ecalais@purdue.edu Plates vs. continuum Gordon and Stein, 1991 Most plates are rigid at the until know we have studied a purely discontinuous approach where plates are
Strain analysis ecalais@purdue.edu Plates vs. continuum Gordon and Stein, 1991 Most plates are rigid at the until know we have studied a purely discontinuous approach where plates are
Problem 1. Answer: 95
 Talent Search Test Solutions January 2014 Problem 1. The unit squares in a x grid are colored blue and gray at random, and each color is equally likely. What is the probability that a 2 x 2 square will
Talent Search Test Solutions January 2014 Problem 1. The unit squares in a x grid are colored blue and gray at random, and each color is equally likely. What is the probability that a 2 x 2 square will
Used to extract image components that are useful in the representation and description of region shape, such as
 Used to extract image components that are useful in the representation and description of region shape, such as boundaries extraction skeletons convex hull morphological filtering thinning pruning Sets
Used to extract image components that are useful in the representation and description of region shape, such as boundaries extraction skeletons convex hull morphological filtering thinning pruning Sets
UNIVERSITY OF TRENTO A THEORETICAL FRAMEWORK FOR UNSUPERVISED CHANGE DETECTION BASED ON CHANGE VECTOR ANALYSIS IN POLAR DOMAIN. F. Bovolo, L.
 UNIVERSITY OF TRENTO DEPARTMENT OF INFORMATION AND COMMUNICATION TECHNOLOGY 38050 Povo Trento (Italy), Via Sommarive 14 http://www.dit.unitn.it A THEORETICAL FRAMEWORK FOR UNSUPERVISED CHANGE DETECTION
UNIVERSITY OF TRENTO DEPARTMENT OF INFORMATION AND COMMUNICATION TECHNOLOGY 38050 Povo Trento (Italy), Via Sommarive 14 http://www.dit.unitn.it A THEORETICAL FRAMEWORK FOR UNSUPERVISED CHANGE DETECTION
Math 350 Solutions for Final Exam Page 1. Problem 1. (10 points) (a) Compute the line integral. F ds C. z dx + y dy + x dz C
 (a) Compute the line integral. F ds C. z dx + y dy + x dz C") Math 35 Solutions for Final Exam Page Problem. ( points) (a) ompute the line integral F ds for the path c(t) = (t 2, t 3, t) with t and the vector field F (x, y, z) = xi + zj + xk. (b) ompute the line
Math 35 Solutions for Final Exam Page Problem. ( points) (a) ompute the line integral F ds for the path c(t) = (t 2, t 3, t) with t and the vector field F (x, y, z) = xi + zj + xk. (b) ompute the line
Lecture 8: Interest Point Detection. Saad J Bedros
 #1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Review of Edge Detectors #2 Today s Lecture Interest Points Detection What do we mean with Interest Point Detection in an Image Goal:
#1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Review of Edge Detectors #2 Today s Lecture Interest Points Detection What do we mean with Interest Point Detection in an Image Goal:
Exercises for Multivariable Differential Calculus XM521
 This document lists all the exercises for XM521. The Type I (True/False) exercises will be given, and should be answered, online immediately following each lecture. The Type III exercises are to be done
This document lists all the exercises for XM521. The Type I (True/False) exercises will be given, and should be answered, online immediately following each lecture. The Type III exercises are to be done
Contents. MATH 32B-2 (18W) (L) G. Liu / (TA) A. Zhou Calculus of Several Variables. 1 Multiple Integrals 3. 2 Vector Fields 9
 (L) G. Liu / (TA) A. Zhou Calculus of Several Variables. 1 Multiple Integrals 3. 2 Vector Fields 9") MATH 32B-2 (8W) (L) G. Liu / (TA) A. Zhou Calculus of Several Variables Contents Multiple Integrals 3 2 Vector Fields 9 3 Line and Surface Integrals 5 4 The Classical Integral Theorems 9 MATH 32B-2 (8W)
MATH 32B-2 (8W) (L) G. Liu / (TA) A. Zhou Calculus of Several Variables Contents Multiple Integrals 3 2 Vector Fields 9 3 Line and Surface Integrals 5 4 The Classical Integral Theorems 9 MATH 32B-2 (8W)
Simple Co-ordinate geometry problems
 Simple Co-ordinate geometry problems 1. Find the equation of straight line passing through the point P(5,2) with equal intercepts. 1. Method 1 Let the equation of straight line be + =1, a,b 0 (a) If a=b
Simple Co-ordinate geometry problems 1. Find the equation of straight line passing through the point P(5,2) with equal intercepts. 1. Method 1 Let the equation of straight line be + =1, a,b 0 (a) If a=b
Chapter 16. Local Operations
 Chapter 16 Local Operations g[x, y] =O{f[x ± x, y ± y]} In many common image processing operations, the output pixel is a weighted combination of the gray values of pixels in the neighborhood of the input
Chapter 16 Local Operations g[x, y] =O{f[x ± x, y ± y]} In many common image processing operations, the output pixel is a weighted combination of the gray values of pixels in the neighborhood of the input
Digital Image Processing. Chapter 4: Image Enhancement in the Frequency Domain
 Digital Image Processing Chapter 4: Image Enhancement in the Frequency Domain Image Enhancement in Frequency Domain Objective: To understand the Fourier Transform and frequency domain and how to apply
Digital Image Processing Chapter 4: Image Enhancement in the Frequency Domain Image Enhancement in Frequency Domain Objective: To understand the Fourier Transform and frequency domain and how to apply
Image as a signal. Luc Brun. January 25, 2018
 Image as a signal Luc Brun January 25, 2018 Introduction Smoothing Edge detection Fourier Transform 2 / 36 Different way to see an image A stochastic process, A random vector (I [0, 0], I [0, 1],..., I
Image as a signal Luc Brun January 25, 2018 Introduction Smoothing Edge detection Fourier Transform 2 / 36 Different way to see an image A stochastic process, A random vector (I [0, 0], I [0, 1],..., I
SECTION A. f(x) = ln(x). Sketch the graph of y = f(x), indicating the coordinates of any points where the graph crosses the axes.
 = ln(x). Sketch the graph of y = f(x), indicating the coordinates of any points where the graph crosses the axes.") SECTION A 1. State the maximal domain and range of the function f(x) = ln(x). Sketch the graph of y = f(x), indicating the coordinates of any points where the graph crosses the axes. 2. By evaluating f(0),
SECTION A 1. State the maximal domain and range of the function f(x) = ln(x). Sketch the graph of y = f(x), indicating the coordinates of any points where the graph crosses the axes. 2. By evaluating f(0),
Image Processing. Waleed A. Yousef Faculty of Computers and Information, Helwan University. April 3, 2010
 Image Processing Waleed A. Yousef Faculty of Computers and Information, Helwan University. April 3, 2010 Ch3. Image Enhancement in the Spatial Domain Note that T (m) = 0.5 E. The general law of contrast
Image Processing Waleed A. Yousef Faculty of Computers and Information, Helwan University. April 3, 2010 Ch3. Image Enhancement in the Spatial Domain Note that T (m) = 0.5 E. The general law of contrast
CONCEPTS FOR ADVANCED MATHEMATICS, C2 (4752) AS
 AS") CONCEPTS FOR ADVANCED MATHEMATICS, C2 (4752) AS Objectives To introduce students to a number of topics which are fundamental to the advanced study of mathematics. Assessment Examination (72 marks) 1 hour
CONCEPTS FOR ADVANCED MATHEMATICS, C2 (4752) AS Objectives To introduce students to a number of topics which are fundamental to the advanced study of mathematics. Assessment Examination (72 marks) 1 hour
Lecture Outline. Basics of Spatial Filtering Smoothing Spatial Filters. Sharpening Spatial Filters
 1 Lecture Outline Basics o Spatial Filtering Smoothing Spatial Filters Averaging ilters Order-Statistics ilters Sharpening Spatial Filters Laplacian ilters High-boost ilters Gradient Masks Combining Spatial
1 Lecture Outline Basics o Spatial Filtering Smoothing Spatial Filters Averaging ilters Order-Statistics ilters Sharpening Spatial Filters Laplacian ilters High-boost ilters Gradient Masks Combining Spatial
Edge Detection PSY 5018H: Math Models Hum Behavior, Prof. Paul Schrater, Spring 2005
 Edge Detection PSY 5018H: Math Models Hum Behavior, Prof. Paul Schrater, Spring 2005 Gradients and edges Points of sharp change in an image are interesting: change in reflectance change in object change
Edge Detection PSY 5018H: Math Models Hum Behavior, Prof. Paul Schrater, Spring 2005 Gradients and edges Points of sharp change in an image are interesting: change in reflectance change in object change
Morphology Gonzalez and Woods, Chapter 9 Except sections 9.5.7, 9.5.8, and Repetition of binary dilatation, erosion, opening, closing
 09.11.2011 Anne Solberg Morphology Gonzalez and Woods, Chapter 9 Except sections 9.5.7, 9.5.8, 9.5.9 and 9.6.4 Repetition of binary dilatation, erosion, opening, closing Binary region processing: connected
09.11.2011 Anne Solberg Morphology Gonzalez and Woods, Chapter 9 Except sections 9.5.7, 9.5.8, 9.5.9 and 9.6.4 Repetition of binary dilatation, erosion, opening, closing Binary region processing: connected
Properties of detectors Edge detectors Harris DoG Properties of descriptors SIFT HOG Shape context
 Lecture 10 Detectors and descriptors Properties of detectors Edge detectors Harris DoG Properties of descriptors SIFT HOG Shape context Silvio Savarese Lecture 10-16-Feb-15 From the 3D to 2D & vice versa
Lecture 10 Detectors and descriptors Properties of detectors Edge detectors Harris DoG Properties of descriptors SIFT HOG Shape context Silvio Savarese Lecture 10-16-Feb-15 From the 3D to 2D & vice versa
MATHEMATICS AS/M/P1 AS PAPER 1
 Surname Other Names Candidate Signature Centre Number Candidate Number Examiner Comments Total Marks MATHEMATICS AS PAPER 1 Bronze Set B (Edexcel Version) CM Time allowed: 2 hours Instructions to candidates:
Surname Other Names Candidate Signature Centre Number Candidate Number Examiner Comments Total Marks MATHEMATICS AS PAPER 1 Bronze Set B (Edexcel Version) CM Time allowed: 2 hours Instructions to candidates:
Tom Robbins WW Prob Lib1 Math , Fall 2001
 Tom Robbins WW Prob Lib Math 220-2, Fall 200 WeBWorK assignment due 9/7/0 at 6:00 AM..( pt) A child walks due east on the deck of a ship at 3 miles per hour. The ship is moving north at a speed of 7 miles
Tom Robbins WW Prob Lib Math 220-2, Fall 200 WeBWorK assignment due 9/7/0 at 6:00 AM..( pt) A child walks due east on the deck of a ship at 3 miles per hour. The ship is moving north at a speed of 7 miles
231 Outline Solutions Tutorial Sheet 4, 5 and November 2007
 31 Outline Solutions Tutorial Sheet 4, 5 and 6. 1 Problem Sheet 4 November 7 1. heck that the Jacobian for the transformation from cartesian to spherical polar coordinates is J = r sin θ. onsider the hemisphere
31 Outline Solutions Tutorial Sheet 4, 5 and 6. 1 Problem Sheet 4 November 7 1. heck that the Jacobian for the transformation from cartesian to spherical polar coordinates is J = r sin θ. onsider the hemisphere
= 9 4 = = = 8 2 = 4. Model Question paper-i SECTION-A 1.C 2.D 3.C 4. C 5. A 6.D 7.B 8.C 9.B B 12.B 13.B 14.D 15.
 www.rktuitioncentre.blogspot.in Page 1 of 8 Model Question paper-i SECTION-A 1.C.D 3.C. C 5. A 6.D 7.B 8.C 9.B 10. 11.B 1.B 13.B 1.D 15.A SECTION-B 16. P a, b, c, Q g,, x, y, R {a, e, f, s} R\ P Q {a,
www.rktuitioncentre.blogspot.in Page 1 of 8 Model Question paper-i SECTION-A 1.C.D 3.C. C 5. A 6.D 7.B 8.C 9.B 10. 11.B 1.B 13.B 1.D 15.A SECTION-B 16. P a, b, c, Q g,, x, y, R {a, e, f, s} R\ P Q {a,
Digital Image Processing. Lecture 6 (Enhancement) Bu-Ali Sina University Computer Engineering Dep. Fall 2009
 Bu-Ali Sina University Computer Engineering Dep. Fall 2009") Digital Image Processing Lecture 6 (Enhancement) Bu-Ali Sina University Computer Engineering Dep. Fall 009 Outline Image Enhancement in Spatial Domain Spatial Filtering Smoothing Filters Median Filter
Digital Image Processing Lecture 6 (Enhancement) Bu-Ali Sina University Computer Engineering Dep. Fall 009 Outline Image Enhancement in Spatial Domain Spatial Filtering Smoothing Filters Median Filter
Curvature of Digital Curves
 Curvature of Digital Curves Left: a symmetric curve (i.e., results should also be symmetric ). Right: high-curvature pixels should correspond to visual perception of corners. Page 1 March 2005 Categories
Curvature of Digital Curves Left: a symmetric curve (i.e., results should also be symmetric ). Right: high-curvature pixels should correspond to visual perception of corners. Page 1 March 2005 Categories
MULTIPLE CHOICE. Choose the one alternative that best completes the statement or answers the question. 3 2, 5 2 C) - 5 2
 - 5 2") Test Review (chap 0) Name MULTIPLE CHOICE. Choose the one alternative that best completes the statement or answers the question. Solve the problem. ) Find the point on the curve x = sin t, y = cos t, -
Test Review (chap 0) Name MULTIPLE CHOICE. Choose the one alternative that best completes the statement or answers the question. Solve the problem. ) Find the point on the curve x = sin t, y = cos t, -
a k 0, then k + 1 = 2 lim 1 + 1
 Math 7 - Midterm - Form A - Page From the desk of C. Davis Buenger. https://people.math.osu.edu/buenger.8/ Problem a) [3 pts] If lim a k = then a k converges. False: The divergence test states that if
Math 7 - Midterm - Form A - Page From the desk of C. Davis Buenger. https://people.math.osu.edu/buenger.8/ Problem a) [3 pts] If lim a k = then a k converges. False: The divergence test states that if
Medical Image Analysis
 Medical Image Analysis CS 593 / 791 Computer Science and Electrical Engineering Dept. West Virginia University 23rd January 2006 Outline 1 Recap 2 Edge Enhancement 3 Experimental Results 4 The rest of
Medical Image Analysis CS 593 / 791 Computer Science and Electrical Engineering Dept. West Virginia University 23rd January 2006 Outline 1 Recap 2 Edge Enhancement 3 Experimental Results 4 The rest of
MAC2313 Final A. (5 pts) 1. How many of the following are necessarily true? i. The vector field F = 2x + 3y, 3x 5y is conservative.
 1. How many of the following are necessarily true? i. The vector field F = 2x + 3y, 3x 5y is conservative.") MAC2313 Final A (5 pts) 1. How many of the following are necessarily true? i. The vector field F = 2x + 3y, 3x 5y is conservative. ii. The vector field F = 5(x 2 + y 2 ) 3/2 x, y is radial. iii. All constant
MAC2313 Final A (5 pts) 1. How many of the following are necessarily true? i. The vector field F = 2x + 3y, 3x 5y is conservative. ii. The vector field F = 5(x 2 + y 2 ) 3/2 x, y is radial. iii. All constant
IYGB Mathematical Methods 1
 IYGB Mathematical Methods Practice Paper B Time: 3 hours Candidates may use any non programmable, non graphical calculator which does not have the capability of storing data or manipulating algebraic expressions
IYGB Mathematical Methods Practice Paper B Time: 3 hours Candidates may use any non programmable, non graphical calculator which does not have the capability of storing data or manipulating algebraic expressions
Lecture 6: Edge Detection. CAP 5415: Computer Vision Fall 2008
 Lecture 6: Edge Detection CAP 5415: Computer Vision Fall 2008 Announcements PS 2 is available Please read it by Thursday During Thursday lecture, I will be going over it in some detail Monday - Computer
Lecture 6: Edge Detection CAP 5415: Computer Vision Fall 2008 Announcements PS 2 is available Please read it by Thursday During Thursday lecture, I will be going over it in some detail Monday - Computer
SOLUTIONS TO THE FINAL EXAM. December 14, 2010, 9:00am-12:00 (3 hours)
") SOLUTIONS TO THE 18.02 FINAL EXAM BJORN POONEN December 14, 2010, 9:00am-12:00 (3 hours) 1) For each of (a)-(e) below: If the statement is true, write TRUE. If the statement is false, write FALSE. (Please
SOLUTIONS TO THE 18.02 FINAL EXAM BJORN POONEN December 14, 2010, 9:00am-12:00 (3 hours) 1) For each of (a)-(e) below: If the statement is true, write TRUE. If the statement is false, write FALSE. (Please
Lecture 04 Image Filtering
 Institute of Informatics Institute of Neuroinformatics Lecture 04 Image Filtering Davide Scaramuzza 1 Lab Exercise 2 - Today afternoon Room ETH HG E 1.1 from 13:15 to 15:00 Work description: your first
Institute of Informatics Institute of Neuroinformatics Lecture 04 Image Filtering Davide Scaramuzza 1 Lab Exercise 2 - Today afternoon Room ETH HG E 1.1 from 13:15 to 15:00 Work description: your first
Electric Fields and Continuous Charge Distributions Challenge Problem Solutions
 Problem 1: Electric Fields and Continuous Charge Distributions Challenge Problem Solutions Two thin, semi-infinite rods lie in the same plane They make an angle of 45º with each other and they are joined
Problem 1: Electric Fields and Continuous Charge Distributions Challenge Problem Solutions Two thin, semi-infinite rods lie in the same plane They make an angle of 45º with each other and they are joined
Multimedia Databases. Previous Lecture. 4.1 Multiresolution Analysis. 4 Shape-based Features. 4.1 Multiresolution Analysis
 Previous Lecture Multimedia Databases Texture-Based Image Retrieval Low Level Features Tamura Measure, Random Field Model High-Level Features Fourier-Transform, Wavelets Wolf-Tilo Balke Silviu Homoceanu
Previous Lecture Multimedia Databases Texture-Based Image Retrieval Low Level Features Tamura Measure, Random Field Model High-Level Features Fourier-Transform, Wavelets Wolf-Tilo Balke Silviu Homoceanu
Directional Derivative and the Gradient Operator
 Chapter 4 Directional Derivative and the Gradient Operator The equation z = f(x, y) defines a surface in 3 dimensions. We can write this as z f(x, y) = 0, or g(x, y, z) = 0, where g(x, y, z) = z f(x, y).
Chapter 4 Directional Derivative and the Gradient Operator The equation z = f(x, y) defines a surface in 3 dimensions. We can write this as z f(x, y) = 0, or g(x, y, z) = 0, where g(x, y, z) = z f(x, y).
Detection of Artificial Satellites in Images Acquired in Track Rate Mode.
 Detection of Artificial Satellites in Images Acquired in Track Rate Mode. Martin P. Lévesque Defence R&D Canada- Valcartier, 2459 Boul. Pie-XI North, Québec, QC, G3J 1X5 Canada, martin.levesque@drdc-rddc.gc.ca
Detection of Artificial Satellites in Images Acquired in Track Rate Mode. Martin P. Lévesque Defence R&D Canada- Valcartier, 2459 Boul. Pie-XI North, Québec, QC, G3J 1X5 Canada, martin.levesque@drdc-rddc.gc.ca
An Algorithm to Identify and Track Objects on Spatial Grids
 An Algorithm to Identify and Track Objects on Spatial Grids VA L L I A P PA L A K S H M A N A N N AT I O N A L S E V E R E S T O R M S L A B O R AT O R Y / U N I V E R S I T Y O F O K L A H O M A S E P,
An Algorithm to Identify and Track Objects on Spatial Grids VA L L I A P PA L A K S H M A N A N N AT I O N A L S E V E R E S T O R M S L A B O R AT O R Y / U N I V E R S I T Y O F O K L A H O M A S E P,
PIV Basics: Correlation
 PIV Basics: Correlation Ken Kiger (UMD) SEDITRANS summer school on Measurement techniques for turbulent open-channel flows Lisbon, Portugal 2015 With some slides contributed by Christian Poelma and Jerry
PIV Basics: Correlation Ken Kiger (UMD) SEDITRANS summer school on Measurement techniques for turbulent open-channel flows Lisbon, Portugal 2015 With some slides contributed by Christian Poelma and Jerry
MATH 1080 Test 2 -Version A-SOLUTIONS Fall a. (8 pts) Find the exact length of the curve on the given interval.
 Find the exact length of the curve on the given interval.") MATH 8 Test -Version A-SOLUTIONS Fall 4. Consider the curve defined by y = ln( sec x), x. a. (8 pts) Find the exact length of the curve on the given interval. sec x tan x = = tan x sec x L = + tan x =
MATH 8 Test -Version A-SOLUTIONS Fall 4. Consider the curve defined by y = ln( sec x), x. a. (8 pts) Find the exact length of the curve on the given interval. sec x tan x = = tan x sec x L = + tan x =
Multimedia Databases. Wolf-Tilo Balke Philipp Wille Institut für Informationssysteme Technische Universität Braunschweig
 Multimedia Databases Wolf-Tilo Balke Philipp Wille Institut für Informationssysteme Technische Universität Braunschweig http://www.ifis.cs.tu-bs.de 4 Previous Lecture Texture-Based Image Retrieval Low
Multimedia Databases Wolf-Tilo Balke Philipp Wille Institut für Informationssysteme Technische Universität Braunschweig http://www.ifis.cs.tu-bs.de 4 Previous Lecture Texture-Based Image Retrieval Low
Chapter 2: Statistical Methods. 4. Total Measurement System and Errors. 2. Characterizing statistical distribution. 3. Interpretation of Results
 36 Chapter : Statistical Methods 1. Introduction. Characterizing statistical distribution 3. Interpretation of Results 4. Total Measurement System and Errors 5. Regression Analysis 37 1.Introduction The
36 Chapter : Statistical Methods 1. Introduction. Characterizing statistical distribution 3. Interpretation of Results 4. Total Measurement System and Errors 5. Regression Analysis 37 1.Introduction The
Multimedia Databases. 4 Shape-based Features. 4.1 Multiresolution Analysis. 4.1 Multiresolution Analysis. 4.1 Multiresolution Analysis
 4 Shape-based Features Multimedia Databases Wolf-Tilo Balke Silviu Homoceanu Institut für Informationssysteme Technische Universität Braunschweig http://www.ifis.cs.tu-bs.de 4 Multiresolution Analysis
4 Shape-based Features Multimedia Databases Wolf-Tilo Balke Silviu Homoceanu Institut für Informationssysteme Technische Universität Braunschweig http://www.ifis.cs.tu-bs.de 4 Multiresolution Analysis
MA 351 Fall 2007 Exam #1 Review Solutions 1
 MA 35 Fall 27 Exam # Review Solutions THERE MAY BE TYPOS in these solutions. Please let me know if you find any.. Consider the two surfaces ρ 3 csc θ in spherical coordinates and r 3 in cylindrical coordinates.
MA 35 Fall 27 Exam # Review Solutions THERE MAY BE TYPOS in these solutions. Please let me know if you find any.. Consider the two surfaces ρ 3 csc θ in spherical coordinates and r 3 in cylindrical coordinates.
Solutions to Sample Questions for Final Exam
 olutions to ample Questions for Final Exam Find the points on the surface xy z 3 that are closest to the origin. We use the method of Lagrange Multipliers, with f(x, y, z) x + y + z for the square of the
olutions to ample Questions for Final Exam Find the points on the surface xy z 3 that are closest to the origin. We use the method of Lagrange Multipliers, with f(x, y, z) x + y + z for the square of the
Distance Formula in 3-D Given any two points P 1 (x 1, y 1, z 1 ) and P 2 (x 2, y 2, z 2 ) the distance between them is ( ) ( ) ( )
 and P 2 (x 2, y 2, z 2 ) the distance between them is ( ) ( ) ( )") Vectors and the Geometry of Space Vector Space The 3-D coordinate system (rectangular coordinates ) is the intersection of three perpendicular (orthogonal) lines called coordinate axis: x, y, and z. Their
Vectors and the Geometry of Space Vector Space The 3-D coordinate system (rectangular coordinates ) is the intersection of three perpendicular (orthogonal) lines called coordinate axis: x, y, and z. Their
THE INVERSE TRIGONOMETRIC FUNCTIONS
 THE INVERSE TRIGONOMETRIC FUNCTIONS Question 1 (**+) Solve the following trigonometric equation ( x ) π + 3arccos + 1 = 0. 1 x = Question (***) It is given that arcsin x = arccos y. Show, by a clear method,
THE INVERSE TRIGONOMETRIC FUNCTIONS Question 1 (**+) Solve the following trigonometric equation ( x ) π + 3arccos + 1 = 0. 1 x = Question (***) It is given that arcsin x = arccos y. Show, by a clear method,
2005 Mathematics. Advanced Higher. Finalised Marking Instructions
 2005 Mathematics Advanced Higher Finalised Marking Instructions These Marking Instructions have been prepared by Examination Teams for use by SQA Appointed Markers when marking External Course Assessments.
2005 Mathematics Advanced Higher Finalised Marking Instructions These Marking Instructions have been prepared by Examination Teams for use by SQA Appointed Markers when marking External Course Assessments.
Advanced Edge Detection 1
 Advanced Edge Detection 1 Lecture 4 See Sections 2.4 and 1.2.5 in Reinhard Klette: Concise Computer Vision Springer-Verlag, London, 2014 1 See last slide for copyright information. 1 / 27 Agenda 1 LoG
Advanced Edge Detection 1 Lecture 4 See Sections 2.4 and 1.2.5 in Reinhard Klette: Concise Computer Vision Springer-Verlag, London, 2014 1 See last slide for copyright information. 1 / 27 Agenda 1 LoG
Notes 19 Gradient and Laplacian
 ECE 3318 Applied Electricity and Magnetism Spring 218 Prof. David R. Jackson Dept. of ECE Notes 19 Gradient and Laplacian 1 Gradient Φ ( x, y, z) =scalar function Φ Φ Φ grad Φ xˆ + yˆ + zˆ x y z We can
ECE 3318 Applied Electricity and Magnetism Spring 218 Prof. David R. Jackson Dept. of ECE Notes 19 Gradient and Laplacian 1 Gradient Φ ( x, y, z) =scalar function Φ Φ Φ grad Φ xˆ + yˆ + zˆ x y z We can
INTEREST POINTS AT DIFFERENT SCALES
 INTEREST POINTS AT DIFFERENT SCALES Thank you for the slides. They come mostly from the following sources. Dan Huttenlocher Cornell U David Lowe U. of British Columbia Martial Hebert CMU Intuitively, junctions
INTEREST POINTS AT DIFFERENT SCALES Thank you for the slides. They come mostly from the following sources. Dan Huttenlocher Cornell U David Lowe U. of British Columbia Martial Hebert CMU Intuitively, junctions
Core A-level mathematics reproduced from the QCA s Subject criteria for Mathematics document
 Core A-level mathematics reproduced from the QCA s Subject criteria for Mathematics document Background knowledge: (a) The arithmetic of integers (including HCFs and LCMs), of fractions, and of real numbers.
Core A-level mathematics reproduced from the QCA s Subject criteria for Mathematics document Background knowledge: (a) The arithmetic of integers (including HCFs and LCMs), of fractions, and of real numbers.
UNSUPERVISED change detection plays an important role
 18 IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 45, NO. 1, JANUARY 7 A Theoretical Framework for Unsupervised Change Detection Based on Change Vector Analysis in the Polar Domain Francesca
18 IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 45, NO. 1, JANUARY 7 A Theoretical Framework for Unsupervised Change Detection Based on Change Vector Analysis in the Polar Domain Francesca
SYMMETRY is a highly salient visual phenomenon and
 JOURNAL OF L A T E X CLASS FILES, VOL. 6, NO. 1, JANUARY 2011 1 Symmetry-Growing for Skewed Rotational Symmetry Detection Hyo Jin Kim, Student Member, IEEE, Minsu Cho, Student Member, IEEE, and Kyoung
JOURNAL OF L A T E X CLASS FILES, VOL. 6, NO. 1, JANUARY 2011 1 Symmetry-Growing for Skewed Rotational Symmetry Detection Hyo Jin Kim, Student Member, IEEE, Minsu Cho, Student Member, IEEE, and Kyoung
Engineering Mechanics: Statics in SI Units, 12e Force Vectors
 Engineering Mechanics: Statics in SI Units, 1e orce Vectors 1 Chapter Objectives Parallelogram Law Cartesian vector form Dot product and angle between vectors Chapter Outline 1. Scalars and Vectors. Vector
Engineering Mechanics: Statics in SI Units, 1e orce Vectors 1 Chapter Objectives Parallelogram Law Cartesian vector form Dot product and angle between vectors Chapter Outline 1. Scalars and Vectors. Vector
SOUTH AFRICAN TERTIARY MATHEMATICS OLYMPIAD
 SOUTH AFRICAN TERTIARY MATHEMATICS OLYMPIAD. Determine the following value: 7 August 6 Solutions π + π. Solution: Since π
SOUTH AFRICAN TERTIARY MATHEMATICS OLYMPIAD. Determine the following value: 7 August 6 Solutions π + π. Solution: Since π
POLAR FORMS: [SST 6.3]
![POLAR FORMS: [SST 6.3]](/thumbs/92/108633266.jpg "POLAR FORMS: [SST 6.3]") POLAR FORMS: [SST 6.3] RECTANGULAR CARTESIAN COORDINATES: Form: x, y where x, y R Origin: x, y = 0, 0 Notice the origin has a unique rectangular coordinate Coordinate x, y is unique. POLAR COORDINATES:
POLAR FORMS: [SST 6.3] RECTANGULAR CARTESIAN COORDINATES: Form: x, y where x, y R Origin: x, y = 0, 0 Notice the origin has a unique rectangular coordinate Coordinate x, y is unique. POLAR COORDINATES:
Parametric Equations and Polar Coordinates
 Parametric Equations and Polar Coordinates Parametrizations of Plane Curves In previous chapters, we have studied curves as the graphs of functions or equations involving the two variables x and y. Another
Parametric Equations and Polar Coordinates Parametrizations of Plane Curves In previous chapters, we have studied curves as the graphs of functions or equations involving the two variables x and y. Another
General review: - a) Dot Product
 Dot Product") General review: - a) Dot Product If θ is the angle between the vectors a and b, then a b = a b cos θ NOTE: Two vectors a and b are orthogonal, if and only if a b = 0. Properties of the Dot Product If a,
General review: - a) Dot Product If θ is the angle between the vectors a and b, then a b = a b cos θ NOTE: Two vectors a and b are orthogonal, if and only if a b = 0. Properties of the Dot Product If a,
Section 6.2 Trigonometric Functions: Unit Circle Approach
 Section. Trigonometric Functions: Unit Circle Approach The unit circle is a circle of radius centered at the origin. If we have an angle in standard position superimposed on the unit circle, the terminal
Section. Trigonometric Functions: Unit Circle Approach The unit circle is a circle of radius centered at the origin. If we have an angle in standard position superimposed on the unit circle, the terminal