Feature Extraction Line & Curve
|
|
|
- Rosamund Golden
- 5 years ago
- Views:
Transcription

1 Feature Extraction Line & Curve 2/25/11 ECEn 631
2 Standard Procedure Locate edges within the image Link broken edges Thin thick edges For every edge pixel, find possible parameters Locate all clusters of parameters Average each cluster to find accurate parameters
3 3
4 4
5 Given a number of edge or feature pixels How to extract a line, curve, circle, or ellipse?
6 Line Detection Detects complex patterns of points in binary image. Maps a complex pattern decision problem into a simple peak detection problem in the space of the parameters of the curve Any line, y = m x + c, can be represented by a point in the m, c plane. Any point, [x, y], corresponds to a line c = -m x + y in parameter space. Different m and c represent different lines that pass the same point [x, y]
7 Peak Detection Image Space x Parameter Space m c y (10,22) and (30,62) n=-10m+22 and n=-30m+62 Multiple lines passing the same point
8 Y = m x + c for a vertical line? It won t work. Ex. (c, r)=(50, 50) θ< θ d 50 c 50 θ d 50 c r θ=315 0 or r θ=330 0 or
9 Ex. (c, r)=(50, 50) θ = 0 0 θ = D=50 Θ=0 50 c D=50 50 c r θ=0 0 r θ=270 0 or
10 Ex. (c, r)=(50, 50) θ > 0 0 θ > d 50 c d 50 c 50 θ= r r θ=240 0 or
11 Ex. (c, r)=(50, 50) D=0 50 c Ex. (c, r)=(40, 30) D= c 50 r Θ~45 0 or r Θ~ or There is a discontinuity between 11
12 12
13 Example P = [c, r] = [50, 50] and θ = d = 50 cos(315) 50 sin(315) = 50(0.707)-50(-0.707) = 70 d θ 13
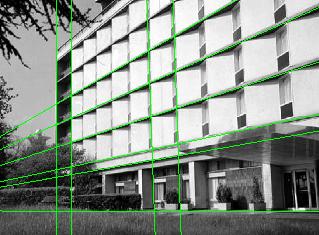
14 For each feature pixel, calculate d for all angles d θ
15 For each feature pixel, calculate d for all angles. d θ
16 What do you do next? Find Local Maxima. Why and how? Noise from edge detector and curved contour generate local and noisy peaks. A unique and single peak is almost impossible. Interpolation or weighted average will yield better accuracy (better than 5 degrees in this case) Set a limit on the closest distance between two peaks
17 θ = (1 ( 5 o )+1 0 o o + 4 ( 5 o )+ 6 0 o o + 2 ( 5 o )+1 0 o +1 5 o )/23 = 0.22 o d = ( )/22 =
18 18
19 19
20 An easier but not so accurate method E x E y
21 E x E y d θ o =90 o
22 Store points to a list: d θ 0 0 =(4,2)(5,2) 20 0 =(5,3) 40 0 =(4,3)(5,4) 60 0 =(4,4) 90 0 =(2,3)(2,4)(2,5)(3,3)(3,4) (3,5)(4,5)(5,5) 22
23 OpenCV Standard Hough transform (SHT) Accumulate all points HoughLines( Mat& image, vector<vec2f>& lines, double rho, double theta, int threshold, double srn=0, double stn=0 ); Progressive probabilissc Hough transform (PPPHT) Accumulate only a fracson of points to reduce computason Sme. HoughLinesP( Mat& image, vector<vec4i>& lines, double rho, double theta, int threshold, double minlinelength=0, double maxlinegap=0 ); 23
24 Circle Detection sinθ = E y /E cosθ = E x /E If a point [R, C] is given, a radius d is selected, and the direction of the vector from [R, C] to the center is computed, the coordinates of the center can be found. The radius d, row center r o, and column center c o are the three parameters used to vote for circles in the Hough Transform. It can be simplified if radius is known. 24
25 Circle Detection The accumulator is 3-dimensional (d, r o, c o ) Needs more memory and runs slower than line (2-D) Hough gradient method: Faster but not as accurate Find edge points Calculate their gradients local maxima selected as centers find points that have equal distance to a center H. K. Yuen, J. Princen, J. Illingworth, and J. Kittler. Comparative study of hough transform methods for circle finding. Image Vision Comput., 8(1):71 77,
26 Finding Any Curves A curve can be expressed as y = f (x,a), where a = [a 1,a 2,,a p ] is a vector of p parameters. Create an array A(s 1,s 2,,s p ) as an accumulator for all parameters, where s 1,s 2,,s p are the sizes of parameters. For each pixel E(i, j) such that when increment accumulator on the curve defined by y = f (x,a). Search local maxima. The output is a set of a 1,a 2,,a p that is the best representation of the curve. 2
27 Generalized Hough Transform Detects arbitrary shapes Select a localization point L within a template of the shape Move from an edge point to L Vote will peak at L D.H. Ballard, "Generalizing the Hough Transform to Detect Arbitrary Shapes", Pattern Recognition, Vol.13, No.2, p , 1981 θ R α L 27
28 HT is a voting algorithm (histogram) More efficient than pattern matching All points are processed independently Works well even with occlusion Robust to noise Computation time is long (ex. Line is faster than circle) Non-target shapes can cause problems 28
Master of Intelligent Systems - French-Czech Double Diploma. Hough transform
 Hough transform I- Introduction The Hough transform is used to isolate features of a particular shape within an image. Because it requires that the desired features be specified in some parametric form,
Hough transform I- Introduction The Hough transform is used to isolate features of a particular shape within an image. Because it requires that the desired features be specified in some parametric form,
Image Segmentation: Definition Importance. Digital Image Processing, 2nd ed. Chapter 10 Image Segmentation.
 : Definition Importance Detection of Discontinuities: 9 R = wi z i= 1 i Point Detection: 1. A Mask 2. Thresholding R T Line Detection: A Suitable Mask in desired direction Thresholding Line i : R R, j
: Definition Importance Detection of Discontinuities: 9 R = wi z i= 1 i Point Detection: 1. A Mask 2. Thresholding R T Line Detection: A Suitable Mask in desired direction Thresholding Line i : R R, j
Edges and Scale. Image Features. Detecting edges. Origin of Edges. Solution: smooth first. Effects of noise
 Edges and Scale Image Features From Sandlot Science Slides revised from S. Seitz, R. Szeliski, S. Lazebnik, etc. Origin of Edges surface normal discontinuity depth discontinuity surface color discontinuity
Edges and Scale Image Features From Sandlot Science Slides revised from S. Seitz, R. Szeliski, S. Lazebnik, etc. Origin of Edges surface normal discontinuity depth discontinuity surface color discontinuity
Chapter 5 Trigonometric Functions of Angles
 Chapter 5 Trigonometric Functions of Angles Section 3 Points on Circles Using Sine and Cosine Signs Signs I Signs (+, +) I Signs II (+, +) I Signs II (, +) (+, +) I Signs II (, +) (+, +) I III Signs II
Chapter 5 Trigonometric Functions of Angles Section 3 Points on Circles Using Sine and Cosine Signs Signs I Signs (+, +) I Signs II (+, +) I Signs II (, +) (+, +) I Signs II (, +) (+, +) I III Signs II
LoG Blob Finding and Scale. Scale Selection. Blobs (and scale selection) Achieving scale covariance. Blob detection in 2D. Blob detection in 2D
 Achieving scale covariance. Blob detection in 2D. Blob detection in 2D") Achieving scale covariance Blobs (and scale selection) Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region
Achieving scale covariance Blobs (and scale selection) Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region
Achieving scale covariance
 Achieving scale covariance Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region size that is covariant
Achieving scale covariance Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region size that is covariant
MAT 211 Final Exam. Spring Jennings. Show your work!
 MAT 211 Final Exam. pring 215. Jennings. how your work! Hessian D = f xx f yy (f xy ) 2 (for optimization). Polar coordinates x = r cos(θ), y = r sin(θ), da = r dr dθ. ylindrical coordinates x = r cos(θ),
MAT 211 Final Exam. pring 215. Jennings. how your work! Hessian D = f xx f yy (f xy ) 2 (for optimization). Polar coordinates x = r cos(θ), y = r sin(θ), da = r dr dθ. ylindrical coordinates x = r cos(θ),
Feature extraction: Corners and blobs
 Feature extraction: Corners and blobs Review: Linear filtering and edge detection Name two different kinds of image noise Name a non-linear smoothing filter What advantages does median filtering have over
Feature extraction: Corners and blobs Review: Linear filtering and edge detection Name two different kinds of image noise Name a non-linear smoothing filter What advantages does median filtering have over
Laplacian Filters. Sobel Filters. Laplacian Filters. Laplacian Filters. Laplacian Filters. Laplacian Filters
 Sobel Filters Note that smoothing the image before applying a Sobel filter typically gives better results. Even thresholding the Sobel filtered image cannot usually create precise, i.e., -pixel wide, edges.
Sobel Filters Note that smoothing the image before applying a Sobel filter typically gives better results. Even thresholding the Sobel filtered image cannot usually create precise, i.e., -pixel wide, edges.
Machine vision. Summary # 4. The mask for Laplacian is given
 1 Machine vision Summary # 4 The mask for Laplacian is given L = 0 1 0 1 4 1 (6) 0 1 0 Another Laplacian mask that gives more importance to the center element is L = 1 1 1 1 8 1 (7) 1 1 1 Note that the
1 Machine vision Summary # 4 The mask for Laplacian is given L = 0 1 0 1 4 1 (6) 0 1 0 Another Laplacian mask that gives more importance to the center element is L = 1 1 1 1 8 1 (7) 1 1 1 Note that the
Lecture 8: Interest Point Detection. Saad J Bedros
 #1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Last Lecture : Edge Detection Preprocessing of image is desired to eliminate or at least minimize noise effects There is always tradeoff
#1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Last Lecture : Edge Detection Preprocessing of image is desired to eliminate or at least minimize noise effects There is always tradeoff
Machine vision, spring 2018 Summary 4
 Machine vision Summary # 4 The mask for Laplacian is given L = 4 (6) Another Laplacian mask that gives more importance to the center element is given by L = 8 (7) Note that the sum of the elements in the
Machine vision Summary # 4 The mask for Laplacian is given L = 4 (6) Another Laplacian mask that gives more importance to the center element is given by L = 8 (7) Note that the sum of the elements in the
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely Lecture 5: Feature descriptors and matching Szeliski: 4.1 Reading Announcements Project 1 Artifacts due tomorrow, Friday 2/17, at 11:59pm Project 2 will be released
CS5670: Computer Vision Noah Snavely Lecture 5: Feature descriptors and matching Szeliski: 4.1 Reading Announcements Project 1 Artifacts due tomorrow, Friday 2/17, at 11:59pm Project 2 will be released
INTEREST POINTS AT DIFFERENT SCALES
 INTEREST POINTS AT DIFFERENT SCALES Thank you for the slides. They come mostly from the following sources. Dan Huttenlocher Cornell U David Lowe U. of British Columbia Martial Hebert CMU Intuitively, junctions
INTEREST POINTS AT DIFFERENT SCALES Thank you for the slides. They come mostly from the following sources. Dan Huttenlocher Cornell U David Lowe U. of British Columbia Martial Hebert CMU Intuitively, junctions
Edge Detection. Image Processing - Computer Vision
 Image Processing - Lesson 10 Edge Detection Image Processing - Computer Vision Low Level Edge detection masks Gradient Detectors Compass Detectors Second Derivative - Laplace detectors Edge Linking Image
Image Processing - Lesson 10 Edge Detection Image Processing - Computer Vision Low Level Edge detection masks Gradient Detectors Compass Detectors Second Derivative - Laplace detectors Edge Linking Image
Lecture 8: Interest Point Detection. Saad J Bedros
 #1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Review of Edge Detectors #2 Today s Lecture Interest Points Detection What do we mean with Interest Point Detection in an Image Goal:
#1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Review of Edge Detectors #2 Today s Lecture Interest Points Detection What do we mean with Interest Point Detection in an Image Goal:
SURFACE quality plays a critical role in quality control of
 370 IEEE TRANSACTIONS ON SEMICONDUCTOR MANUFACTURING, VOL. 23, NO. 3, AUGUST 2010 Statistical Detection of Defect Patterns Using Hough Transform Qiang Zhou, Li Zeng, and Shiyu Zhou Abstract Surface defects
370 IEEE TRANSACTIONS ON SEMICONDUCTOR MANUFACTURING, VOL. 23, NO. 3, AUGUST 2010 Statistical Detection of Defect Patterns Using Hough Transform Qiang Zhou, Li Zeng, and Shiyu Zhou Abstract Surface defects
Detectors part II Descriptors
 EECS 442 Computer vision Detectors part II Descriptors Blob detectors Invariance Descriptors Some slides of this lectures are courtesy of prof F. Li, prof S. Lazebnik, and various other lecturers Goal:
EECS 442 Computer vision Detectors part II Descriptors Blob detectors Invariance Descriptors Some slides of this lectures are courtesy of prof F. Li, prof S. Lazebnik, and various other lecturers Goal:
CS 534: Computer Vision Segmentation III Statistical Nonparametric Methods for Segmentation
 CS 534: Computer Vision Segmentation III Statistical Nonparametric Methods for Segmentation Ahmed Elgammal Dept of Computer Science CS 534 Segmentation III- Nonparametric Methods - - 1 Outlines Density
CS 534: Computer Vision Segmentation III Statistical Nonparametric Methods for Segmentation Ahmed Elgammal Dept of Computer Science CS 534 Segmentation III- Nonparametric Methods - - 1 Outlines Density
Advanced Edge Detection 1
 Advanced Edge Detection 1 Lecture 4 See Sections 2.4 and 1.2.5 in Reinhard Klette: Concise Computer Vision Springer-Verlag, London, 2014 1 See last slide for copyright information. 1 / 27 Agenda 1 LoG
Advanced Edge Detection 1 Lecture 4 See Sections 2.4 and 1.2.5 in Reinhard Klette: Concise Computer Vision Springer-Verlag, London, 2014 1 See last slide for copyright information. 1 / 27 Agenda 1 LoG
SIFT: Scale Invariant Feature Transform
 1 SIFT: Scale Invariant Feature Transform With slides from Sebastian Thrun Stanford CS223B Computer Vision, Winter 2006 3 Pattern Recognition Want to find in here SIFT Invariances: Scaling Rotation Illumination
1 SIFT: Scale Invariant Feature Transform With slides from Sebastian Thrun Stanford CS223B Computer Vision, Winter 2006 3 Pattern Recognition Want to find in here SIFT Invariances: Scaling Rotation Illumination
Feature Tracking. 2/27/12 ECEn 631
 Corner Extraction Feature Tracking Mostly for multi-frame applications Object Tracking Motion detection Image matching Image mosaicing 3D modeling Object recognition Homography estimation... Global Features
Corner Extraction Feature Tracking Mostly for multi-frame applications Object Tracking Motion detection Image matching Image mosaicing 3D modeling Object recognition Homography estimation... Global Features
Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems
 Robots for People --- A project for intelligent integrated systems") 1 Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems V. Estivill-Castro 2 Perception Concepts Vision Chapter 4 (textbook) Sections 4.3 to 4.5 What is the course
1 Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems V. Estivill-Castro 2 Perception Concepts Vision Chapter 4 (textbook) Sections 4.3 to 4.5 What is the course
CS 3710: Visual Recognition Describing Images with Features. Adriana Kovashka Department of Computer Science January 8, 2015
 CS 3710: Visual Recognition Describing Images with Features Adriana Kovashka Department of Computer Science January 8, 2015 Plan for Today Presentation assignments + schedule changes Image filtering Feature
CS 3710: Visual Recognition Describing Images with Features Adriana Kovashka Department of Computer Science January 8, 2015 Plan for Today Presentation assignments + schedule changes Image filtering Feature
Corner. Corners are the intersections of two edges of sufficiently different orientations.
 2D Image Features Two dimensional image features are interesting local structures. They include junctions of different types like Y, T, X, and L. Much of the work on 2D features focuses on junction L,
2D Image Features Two dimensional image features are interesting local structures. They include junctions of different types like Y, T, X, and L. Much of the work on 2D features focuses on junction L,
Feature detectors and descriptors. Fei-Fei Li
 Feature detectors and descriptors Fei-Fei Li Feature Detection e.g. DoG detected points (~300) coordinates, neighbourhoods Feature Description e.g. SIFT local descriptors (invariant) vectors database of
Feature detectors and descriptors Fei-Fei Li Feature Detection e.g. DoG detected points (~300) coordinates, neighbourhoods Feature Description e.g. SIFT local descriptors (invariant) vectors database of
Edge Detection in Computer Vision Systems
 1 CS332 Visual Processing in Computer and Biological Vision Systems Edge Detection in Computer Vision Systems This handout summarizes much of the material on the detection and description of intensity
1 CS332 Visual Processing in Computer and Biological Vision Systems Edge Detection in Computer Vision Systems This handout summarizes much of the material on the detection and description of intensity
Ch 4. Linear Models for Classification
 Ch 4. Linear Models for Classification Pattern Recognition and Machine Learning, C. M. Bishop, 2006. Department of Computer Science and Engineering Pohang University of Science and echnology 77 Cheongam-ro,
Ch 4. Linear Models for Classification Pattern Recognition and Machine Learning, C. M. Bishop, 2006. Department of Computer Science and Engineering Pohang University of Science and echnology 77 Cheongam-ro,
A. Correct! These are the corresponding rectangular coordinates.
 Precalculus - Problem Drill 20: Polar Coordinates No. 1 of 10 1. Find the rectangular coordinates given the point (0, π) in polar (A) (0, 0) (B) (2, 0) (C) (0, 2) (D) (2, 2) (E) (0, -2) A. Correct! These
Precalculus - Problem Drill 20: Polar Coordinates No. 1 of 10 1. Find the rectangular coordinates given the point (0, π) in polar (A) (0, 0) (B) (2, 0) (C) (0, 2) (D) (2, 2) (E) (0, -2) A. Correct! These
Edge Detection. CS 650: Computer Vision
 CS 650: Computer Vision Edges and Gradients Edge: local indication of an object transition Edge detection: local operators that find edges (usually involves convolution) Local intensity transitions are
CS 650: Computer Vision Edges and Gradients Edge: local indication of an object transition Edge detection: local operators that find edges (usually involves convolution) Local intensity transitions are
Feature detectors and descriptors. Fei-Fei Li
 Feature detectors and descriptors Fei-Fei Li Feature Detection e.g. DoG detected points (~300) coordinates, neighbourhoods Feature Description e.g. SIFT local descriptors (invariant) vectors database of
Feature detectors and descriptors Fei-Fei Li Feature Detection e.g. DoG detected points (~300) coordinates, neighbourhoods Feature Description e.g. SIFT local descriptors (invariant) vectors database of
Harris Corner Detector
 Multimedia Computing: Algorithms, Systems, and Applications: Feature Extraction By Dr. Yu Cao Department of Computer Science The University of Massachusetts Lowell Lowell, MA 01854, USA Part of the slides
Multimedia Computing: Algorithms, Systems, and Applications: Feature Extraction By Dr. Yu Cao Department of Computer Science The University of Massachusetts Lowell Lowell, MA 01854, USA Part of the slides
Things You Should Know Coming Into Calc I
 Things You Should Know Coming Into Calc I Algebraic Rules, Properties, Formulas, Ideas and Processes: 1) Rules and Properties of Exponents. Let x and y be positive real numbers, let a and b represent real
Things You Should Know Coming Into Calc I Algebraic Rules, Properties, Formulas, Ideas and Processes: 1) Rules and Properties of Exponents. Let x and y be positive real numbers, let a and b represent real
Deformation and Viewpoint Invariant Color Histograms
 1 Deformation and Viewpoint Invariant Histograms Justin Domke and Yiannis Aloimonos Computer Vision Laboratory, Department of Computer Science University of Maryland College Park, MD 274, USA domke@cs.umd.edu,
1 Deformation and Viewpoint Invariant Histograms Justin Domke and Yiannis Aloimonos Computer Vision Laboratory, Department of Computer Science University of Maryland College Park, MD 274, USA domke@cs.umd.edu,
Blob Detection CSC 767
 Blob Detection CSC 767 Blob detection Slides: S. Lazebnik Feature detection with scale selection We want to extract features with characteristic scale that is covariant with the image transformation Blob
Blob Detection CSC 767 Blob detection Slides: S. Lazebnik Feature detection with scale selection We want to extract features with characteristic scale that is covariant with the image transformation Blob
An Algorithm to Identify and Track Objects on Spatial Grids
 An Algorithm to Identify and Track Objects on Spatial Grids VA L L I A P PA L A K S H M A N A N N AT I O N A L S E V E R E S T O R M S L A B O R AT O R Y / U N I V E R S I T Y O F O K L A H O M A S E P,
An Algorithm to Identify and Track Objects on Spatial Grids VA L L I A P PA L A K S H M A N A N N AT I O N A L S E V E R E S T O R M S L A B O R AT O R Y / U N I V E R S I T Y O F O K L A H O M A S E P,
Corners, Blobs & Descriptors. With slides from S. Lazebnik & S. Seitz, D. Lowe, A. Efros
 Corners, Blobs & Descriptors With slides from S. Lazebnik & S. Seitz, D. Lowe, A. Efros Motivation: Build a Panorama M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 How do we build panorama?
Corners, Blobs & Descriptors With slides from S. Lazebnik & S. Seitz, D. Lowe, A. Efros Motivation: Build a Panorama M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 How do we build panorama?
4.4: Optimization. Problem 2 Find the radius of a cylindrical container with a volume of 2π m 3 that minimizes the surface area.
 4.4: Optimization Problem 1 Suppose you want to maximize a continuous function on a closed interval, but you find that it only has one local extremum on the interval which happens to be a local minimum.
4.4: Optimization Problem 1 Suppose you want to maximize a continuous function on a closed interval, but you find that it only has one local extremum on the interval which happens to be a local minimum.
and ( x, y) in a domain D R a unique real number denoted x y and b) = x y = {(, ) + 36} that is all points inside and on
 in a domain D R a unique real number denoted x y and b) = x y = {(, ) + 36} that is all points inside and on") Mat 7 Calculus III Updated on 10/4/07 Dr. Firoz Chapter 14 Partial Derivatives Section 14.1 Functions o Several Variables Deinition: A unction o two variables is a rule that assigns to each ordered pair
Mat 7 Calculus III Updated on 10/4/07 Dr. Firoz Chapter 14 Partial Derivatives Section 14.1 Functions o Several Variables Deinition: A unction o two variables is a rule that assigns to each ordered pair
CS 1674: Intro to Computer Vision. Final Review. Prof. Adriana Kovashka University of Pittsburgh December 7, 2016
 CS 1674: Intro to Computer Vision Final Review Prof. Adriana Kovashka University of Pittsburgh December 7, 2016 Final info Format: multiple-choice, true/false, fill in the blank, short answers, apply an
CS 1674: Intro to Computer Vision Final Review Prof. Adriana Kovashka University of Pittsburgh December 7, 2016 Final info Format: multiple-choice, true/false, fill in the blank, short answers, apply an
Least squares contour alignment
 Least squares contour alignment Ivan Markovsky and Sasan Mahmoodi School of Electronics and Computer Science University of Southampton, SO7 BJ, UK Emails: {im,sm3}@ecssotonacuk Abstract The contour alignment
Least squares contour alignment Ivan Markovsky and Sasan Mahmoodi School of Electronics and Computer Science University of Southampton, SO7 BJ, UK Emails: {im,sm3}@ecssotonacuk Abstract The contour alignment
SYMMETRY is a highly salient visual phenomenon and
 JOURNAL OF L A T E X CLASS FILES, VOL. 6, NO. 1, JANUARY 2011 1 Symmetry-Growing for Skewed Rotational Symmetry Detection Hyo Jin Kim, Student Member, IEEE, Minsu Cho, Student Member, IEEE, and Kyoung
JOURNAL OF L A T E X CLASS FILES, VOL. 6, NO. 1, JANUARY 2011 1 Symmetry-Growing for Skewed Rotational Symmetry Detection Hyo Jin Kim, Student Member, IEEE, Minsu Cho, Student Member, IEEE, and Kyoung
Understanding Misclassification in a Five Particle CNN Jonathan Karp 8/04/2016
 Understanding Misclassification in a Five Particle CNN Jonathan Karp 8/04/2016 Abstract In this paper, I present the results of my research as an REU student working on the MicroBooNE experiment at Fermilab.
Understanding Misclassification in a Five Particle CNN Jonathan Karp 8/04/2016 Abstract In this paper, I present the results of my research as an REU student working on the MicroBooNE experiment at Fermilab.
Templates, Image Pyramids, and Filter Banks
 Templates, Image Pyramids, and Filter Banks 09/9/ Computer Vision James Hays, Brown Slides: Hoiem and others Review. Match the spatial domain image to the Fourier magnitude image 2 3 4 5 B A C D E Slide:
Templates, Image Pyramids, and Filter Banks 09/9/ Computer Vision James Hays, Brown Slides: Hoiem and others Review. Match the spatial domain image to the Fourier magnitude image 2 3 4 5 B A C D E Slide:
Problem Session #5. EE368/CS232 Digital Image Processing
 Problem Session #5 EE368/CS232 Digital Image Processing 1. Solving a Jigsaw Puzzle Please download the image hw5_puzzle_pieces.jpg from the handouts webpage, which shows the pieces of a jigsaw puzzle.
Problem Session #5 EE368/CS232 Digital Image Processing 1. Solving a Jigsaw Puzzle Please download the image hw5_puzzle_pieces.jpg from the handouts webpage, which shows the pieces of a jigsaw puzzle.
POLAR FORMS: [SST 6.3]
![POLAR FORMS: [SST 6.3]](/thumbs/92/108633266.jpg "POLAR FORMS: [SST 6.3]") POLAR FORMS: [SST 6.3] RECTANGULAR CARTESIAN COORDINATES: Form: x, y where x, y R Origin: x, y = 0, 0 Notice the origin has a unique rectangular coordinate Coordinate x, y is unique. POLAR COORDINATES:
POLAR FORMS: [SST 6.3] RECTANGULAR CARTESIAN COORDINATES: Form: x, y where x, y R Origin: x, y = 0, 0 Notice the origin has a unique rectangular coordinate Coordinate x, y is unique. POLAR COORDINATES:
Image Analysis. Feature extraction: corners and blobs
 Image Analysis Feature extraction: corners and blobs Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Svetlana Lazebnik, University of North Carolina at Chapel Hill (http://www.cs.unc.edu/~lazebnik/spring10/).
Image Analysis Feature extraction: corners and blobs Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Svetlana Lazebnik, University of North Carolina at Chapel Hill (http://www.cs.unc.edu/~lazebnik/spring10/).
Robust Angle Invariant 1D Barcode Detection
 Robust Angle Invariant 1D Barcode Detection Alessandro Zamberletti A. Zamberletti, I. Gallo and S. Albertini Department of Theoretical and Applied Science (DiSTA) University of Insubria ACPR2013 8 November
Robust Angle Invariant 1D Barcode Detection Alessandro Zamberletti A. Zamberletti, I. Gallo and S. Albertini Department of Theoretical and Applied Science (DiSTA) University of Insubria ACPR2013 8 November
Image Processing 1 (IP1) Bildverarbeitung 1
 Bildverarbeitung 1") MIN-Fakultät Fachbereich Informatik Arbeitsbereich SAV/BV KOGS Image Processing 1 IP1 Bildverarbeitung 1 Lecture : Object Recognition Winter Semester 015/16 Slides: Prof. Bernd Neumann Slightly revised
MIN-Fakultät Fachbereich Informatik Arbeitsbereich SAV/BV KOGS Image Processing 1 IP1 Bildverarbeitung 1 Lecture : Object Recognition Winter Semester 015/16 Slides: Prof. Bernd Neumann Slightly revised
Properties of detectors Edge detectors Harris DoG Properties of descriptors SIFT HOG Shape context
 Lecture 10 Detectors and descriptors Properties of detectors Edge detectors Harris DoG Properties of descriptors SIFT HOG Shape context Silvio Savarese Lecture 10-16-Feb-15 From the 3D to 2D & vice versa
Lecture 10 Detectors and descriptors Properties of detectors Edge detectors Harris DoG Properties of descriptors SIFT HOG Shape context Silvio Savarese Lecture 10-16-Feb-15 From the 3D to 2D & vice versa
Section 15.6 Directional Derivatives and the Gradient Vector
 Section 15.6 Directional Derivatives and te Gradient Vector Finding rates of cange in different directions Recall tat wen we first started considering derivatives of functions of more tan one variable,
Section 15.6 Directional Derivatives and te Gradient Vector Finding rates of cange in different directions Recall tat wen we first started considering derivatives of functions of more tan one variable,
Representing regions in 2 ways:
 Representing regions in 2 ways: Based on their external characteristics (its boundary): Shape characteristics Based on their internal characteristics (its region): Both Regional properties: color, texture,
Representing regions in 2 ways: Based on their external characteristics (its boundary): Shape characteristics Based on their internal characteristics (its region): Both Regional properties: color, texture,
Pole searching algorithm for Wide-field all-sky image analyzing monitoring system
 Contrib. Astron. Obs. Skalnaté Pleso 47, 220 225, (2017) Pole searching algorithm for Wide-field all-sky image analyzing monitoring system J. Bednář, P. Skala and P. Páta Czech Technical University in
Contrib. Astron. Obs. Skalnaté Pleso 47, 220 225, (2017) Pole searching algorithm for Wide-field all-sky image analyzing monitoring system J. Bednář, P. Skala and P. Páta Czech Technical University in
Lecture 12. Local Feature Detection. Matching with Invariant Features. Why extract features? Why extract features? Why extract features?
 Lecture 1 Why extract eatures? Motivation: panorama stitching We have two images how do we combine them? Local Feature Detection Guest lecturer: Alex Berg Reading: Harris and Stephens David Lowe IJCV We
Lecture 1 Why extract eatures? Motivation: panorama stitching We have two images how do we combine them? Local Feature Detection Guest lecturer: Alex Berg Reading: Harris and Stephens David Lowe IJCV We
Lecture 4: Perceptrons and Multilayer Perceptrons
 Lecture 4: Perceptrons and Multilayer Perceptrons Cognitive Systems II - Machine Learning SS 2005 Part I: Basic Approaches of Concept Learning Perceptrons, Artificial Neuronal Networks Lecture 4: Perceptrons
Lecture 4: Perceptrons and Multilayer Perceptrons Cognitive Systems II - Machine Learning SS 2005 Part I: Basic Approaches of Concept Learning Perceptrons, Artificial Neuronal Networks Lecture 4: Perceptrons
1 Matrices and matrix algebra
 1 Matrices and matrix algebra 1.1 Examples of matrices A matrix is a rectangular array of numbers and/or variables. For instance 4 2 0 3 1 A = 5 1.2 0.7 x 3 π 3 4 6 27 is a matrix with 3 rows and 5 columns
1 Matrices and matrix algebra 1.1 Examples of matrices A matrix is a rectangular array of numbers and/or variables. For instance 4 2 0 3 1 A = 5 1.2 0.7 x 3 π 3 4 6 27 is a matrix with 3 rows and 5 columns
3D Coordinate Transformations. Tuesday September 8 th 2015
 3D Coordinate Transformations Tuesday September 8 th 25 CS 4 Ross Beveridge & Bruce Draper Questions / Practice (from last week I messed up!) Write a matrix to rotate a set of 2D points about the origin
3D Coordinate Transformations Tuesday September 8 th 25 CS 4 Ross Beveridge & Bruce Draper Questions / Practice (from last week I messed up!) Write a matrix to rotate a set of 2D points about the origin
Flux Invariants for Shape
 Flux Invariants for Shape avel Dimitrov James N. Damon Kaleem Siddiqi School of Computer Science Department of Mathematics McGill University University of North Carolina, Chapel Hill Montreal, Canada Chapel
Flux Invariants for Shape avel Dimitrov James N. Damon Kaleem Siddiqi School of Computer Science Department of Mathematics McGill University University of North Carolina, Chapel Hill Montreal, Canada Chapel
Multimedia Databases. Previous Lecture. 4.1 Multiresolution Analysis. 4 Shape-based Features. 4.1 Multiresolution Analysis
 Previous Lecture Multimedia Databases Texture-Based Image Retrieval Low Level Features Tamura Measure, Random Field Model High-Level Features Fourier-Transform, Wavelets Wolf-Tilo Balke Silviu Homoceanu
Previous Lecture Multimedia Databases Texture-Based Image Retrieval Low Level Features Tamura Measure, Random Field Model High-Level Features Fourier-Transform, Wavelets Wolf-Tilo Balke Silviu Homoceanu
worked out from first principles by parameterizing the path, etc. If however C is a A path C is a simple closed path if and only if the starting point
 III.c Green s Theorem As mentioned repeatedly, if F is not a gradient field then F dr must be worked out from first principles by parameterizing the path, etc. If however is a simple closed path in the
III.c Green s Theorem As mentioned repeatedly, if F is not a gradient field then F dr must be worked out from first principles by parameterizing the path, etc. If however is a simple closed path in the
Calculus 1 Exam 1 MAT 250, Spring 2011 D. Ivanšić. Name: Show all your work!
 Calculus 1 Exam 1 MAT 250, Spring 2011 D. Ivanšić Name: Show all your work! 1. (16pts) Use the graph of the function to answer the following. Justify your answer if a limit does not exist. lim x 2 f(x)
Calculus 1 Exam 1 MAT 250, Spring 2011 D. Ivanšić Name: Show all your work! 1. (16pts) Use the graph of the function to answer the following. Justify your answer if a limit does not exist. lim x 2 f(x)
Using edge information in time frequency representations for chirp parameter estimation
 Appl. Comput. Harmon. Anal. 18 (2005) 186 197 www.elsevier.com/locate/acha Letter to the Editor Using edge information in time frequency representations for chirp parameter estimation Nicholas N. Bennett
Appl. Comput. Harmon. Anal. 18 (2005) 186 197 www.elsevier.com/locate/acha Letter to the Editor Using edge information in time frequency representations for chirp parameter estimation Nicholas N. Bennett
The choice of origin, axes, and length is completely arbitrary.
 Polar Coordinates There are many ways to mark points in the plane or in 3-dim space for purposes of navigation. In the familiar rectangular coordinate system, a point is chosen as the origin and a perpendicular
Polar Coordinates There are many ways to mark points in the plane or in 3-dim space for purposes of navigation. In the familiar rectangular coordinate system, a point is chosen as the origin and a perpendicular
Example 2.1. Draw the points with polar coordinates: (i) (3, π) (ii) (2, π/4) (iii) (6, 2π/4) We illustrate all on the following graph:
 (3, π) (ii) (2, π/4) (iii) (6, 2π/4) We illustrate all on the following graph:") Section 10.3: Polar Coordinates The polar coordinate system is another way to coordinatize the Cartesian plane. It is particularly useful when examining regions which are circular. 1. Cartesian Coordinates
Section 10.3: Polar Coordinates The polar coordinate system is another way to coordinatize the Cartesian plane. It is particularly useful when examining regions which are circular. 1. Cartesian Coordinates
Multimedia Databases. Wolf-Tilo Balke Philipp Wille Institut für Informationssysteme Technische Universität Braunschweig
 Multimedia Databases Wolf-Tilo Balke Philipp Wille Institut für Informationssysteme Technische Universität Braunschweig http://www.ifis.cs.tu-bs.de 4 Previous Lecture Texture-Based Image Retrieval Low
Multimedia Databases Wolf-Tilo Balke Philipp Wille Institut für Informationssysteme Technische Universität Braunschweig http://www.ifis.cs.tu-bs.de 4 Previous Lecture Texture-Based Image Retrieval Low
Multimedia Databases. 4 Shape-based Features. 4.1 Multiresolution Analysis. 4.1 Multiresolution Analysis. 4.1 Multiresolution Analysis
 4 Shape-based Features Multimedia Databases Wolf-Tilo Balke Silviu Homoceanu Institut für Informationssysteme Technische Universität Braunschweig http://www.ifis.cs.tu-bs.de 4 Multiresolution Analysis
4 Shape-based Features Multimedia Databases Wolf-Tilo Balke Silviu Homoceanu Institut für Informationssysteme Technische Universität Braunschweig http://www.ifis.cs.tu-bs.de 4 Multiresolution Analysis
Integrals in cylindrical, spherical coordinates (Sect. 15.7)
") Integrals in clindrical, spherical coordinates (Sect. 15.7 Integration in spherical coordinates. Review: Clindrical coordinates. Spherical coordinates in space. Triple integral in spherical coordinates.
Integrals in clindrical, spherical coordinates (Sect. 15.7 Integration in spherical coordinates. Review: Clindrical coordinates. Spherical coordinates in space. Triple integral in spherical coordinates.
Metric-based classifiers. Nuno Vasconcelos UCSD
 Metric-based classifiers Nuno Vasconcelos UCSD Statistical learning goal: given a function f. y f and a collection of eample data-points, learn what the function f. is. this is called training. two major
Metric-based classifiers Nuno Vasconcelos UCSD Statistical learning goal: given a function f. y f and a collection of eample data-points, learn what the function f. is. this is called training. two major
ARNOLD PIZER rochester problib from CVS Summer 2003
 WeBWorK assignment VmultivariableFunctions due 3/3/08 at 2:00 AM.( pt) setvmultivariablefunctions/ur VC 5.pg Match the surfaces with the verbal description of the level curves by placing the letter of
WeBWorK assignment VmultivariableFunctions due 3/3/08 at 2:00 AM.( pt) setvmultivariablefunctions/ur VC 5.pg Match the surfaces with the verbal description of the level curves by placing the letter of
Strain analysis.
 Strain analysis ecalais@purdue.edu Plates vs. continuum Gordon and Stein, 1991 Most plates are rigid at the until know we have studied a purely discontinuous approach where plates are
Strain analysis ecalais@purdue.edu Plates vs. continuum Gordon and Stein, 1991 Most plates are rigid at the until know we have studied a purely discontinuous approach where plates are
Slide a window along the input arc sequence S. Least-squares estimate. σ 2. σ Estimate 1. Statistically test the difference between θ 1 and θ 2
 Corner Detection 2D Image Features Corners are important two dimensional features. Two dimensional image features are interesting local structures. They include junctions of dierent types Slide 3 They
Corner Detection 2D Image Features Corners are important two dimensional features. Two dimensional image features are interesting local structures. They include junctions of dierent types Slide 3 They
A Robust Modular Wavelet Network Based Symbol Classifier
 A Robust Modular Wavelet Network Based Symbol Classifier A.K. Mishra, P.W. Fieguth, D.A. Clausi University of Waterloo, Vision and Image Processing Group akmishra, pfieguth, dclausi@uwaterloo.ca Abstract.
A Robust Modular Wavelet Network Based Symbol Classifier A.K. Mishra, P.W. Fieguth, D.A. Clausi University of Waterloo, Vision and Image Processing Group akmishra, pfieguth, dclausi@uwaterloo.ca Abstract.
More with Angles Reference Angles
 More with Angles Reference Angles A reference angle is the angle formed by the terminal side of an angle θ, and the (closest) x axis. A reference angle, θ', is always 0 o
More with Angles Reference Angles A reference angle is the angle formed by the terminal side of an angle θ, and the (closest) x axis. A reference angle, θ', is always 0 o
Math 111D Calculus 1 Exam 2 Practice Problems Fall 2001
 Math D Calculus Exam Practice Problems Fall This is not a comprehensive set of problems, but I ve added some more problems since Monday in class.. Find the derivatives of the following functions a) y =
Math D Calculus Exam Practice Problems Fall This is not a comprehensive set of problems, but I ve added some more problems since Monday in class.. Find the derivatives of the following functions a) y =
IYGB Mathematical Methods 1
 IYGB Mathematical Methods Practice Paper B Time: 3 hours Candidates may use any non programmable, non graphical calculator which does not have the capability of storing data or manipulating algebraic expressions
IYGB Mathematical Methods Practice Paper B Time: 3 hours Candidates may use any non programmable, non graphical calculator which does not have the capability of storing data or manipulating algebraic expressions
Unit 2 Maths Methods (CAS) Exam
 Exam") Name: Teacher: Unit Maths Methods (CAS) Exam 1 014 Monday November 17 (9.00-10.45am) Reading time: 15 Minutes Writing time: 90 Minutes Instruction to candidates: Students are permitted to bring into the
Name: Teacher: Unit Maths Methods (CAS) Exam 1 014 Monday November 17 (9.00-10.45am) Reading time: 15 Minutes Writing time: 90 Minutes Instruction to candidates: Students are permitted to bring into the
3. On the grid below, sketch and label graphs of the following functions: y = sin x, y = cos x, and y = sin(x π/2). π/2 π 3π/2 2π 5π/2
. π/2 π 3π/2 2π 5π/2") AP Physics C Calculus C.1 Name Trigonometric Functions 1. Consider the right triangle to the right. In terms of a, b, and c, write the expressions for the following: c a sin θ = cos θ = tan θ =. Using
AP Physics C Calculus C.1 Name Trigonometric Functions 1. Consider the right triangle to the right. In terms of a, b, and c, write the expressions for the following: c a sin θ = cos θ = tan θ =. Using
MULTIPLE CHOICE. Choose the one alternative that best completes the statement or answers the question. 3 2, 5 2 C) - 5 2
 - 5 2") Test Review (chap 0) Name MULTIPLE CHOICE. Choose the one alternative that best completes the statement or answers the question. Solve the problem. ) Find the point on the curve x = sin t, y = cos t, -
Test Review (chap 0) Name MULTIPLE CHOICE. Choose the one alternative that best completes the statement or answers the question. Solve the problem. ) Find the point on the curve x = sin t, y = cos t, -
Blur Image Edge to Enhance Zernike Moments for Object Recognition
 Journal of Computer and Communications, 2016, 4, 79-91 http://www.scirp.org/journal/jcc ISSN Online: 2327-5227 ISSN Print: 2327-5219 Blur Image Edge to Enhance Zernike Moments for Object Recognition Chihying
Journal of Computer and Communications, 2016, 4, 79-91 http://www.scirp.org/journal/jcc ISSN Online: 2327-5227 ISSN Print: 2327-5219 Blur Image Edge to Enhance Zernike Moments for Object Recognition Chihying
Mixture Models and EM
 Mixture Models and EM Goal: Introduction to probabilistic mixture models and the expectationmaximization (EM) algorithm. Motivation: simultaneous fitting of multiple model instances unsupervised clustering
Mixture Models and EM Goal: Introduction to probabilistic mixture models and the expectationmaximization (EM) algorithm. Motivation: simultaneous fitting of multiple model instances unsupervised clustering
Solve for an unknown rate of change using related rates of change.
 Objectives: Solve for an unknown rate of change using related rates of change. 1. Draw a diagram. 2. Label your diagram, including units. If a quantity in the diagram is not changing, label it with a number.
Objectives: Solve for an unknown rate of change using related rates of change. 1. Draw a diagram. 2. Label your diagram, including units. If a quantity in the diagram is not changing, label it with a number.
Review exercise 2. 1 The equation of the line is: = 5 a The gradient of l1 is 3. y y x x. So the gradient of l2 is. The equation of line l2 is: y =
 Review exercise The equation of the line is: y y x x y y x x y 8 x+ 6 8 + y 8 x+ 6 y x x + y 0 y ( ) ( x 9) y+ ( x 9) y+ x 9 x y 0 a, b, c Using points A and B: y y x x y y x x y x 0 k 0 y x k ky k x a
Review exercise The equation of the line is: y y x x y y x x y 8 x+ 6 8 + y 8 x+ 6 y x x + y 0 y ( ) ( x 9) y+ ( x 9) y+ x 9 x y 0 a, b, c Using points A and B: y y x x y y x x y x 0 k 0 y x k ky k x a
b g 6. P 2 4 π b g b g of the way from A to B. LATE AND ABSENT HOMEWORK IS ACCEPTED UP TO THE TIME OF THE CHAPTER TEST ON ASSIGNMENT DUE
 A Trig/Math Anal Name No LATE AND ABSENT HOMEWORK IS ACCEPTED UP TO THE TIME OF THE CHAPTER TEST ON HW NO. SECTIONS (Brown Book) ASSIGNMENT DUE V 1 1 1/1 Practice Set A V 1 3 Practice Set B #1 1 V B 1
A Trig/Math Anal Name No LATE AND ABSENT HOMEWORK IS ACCEPTED UP TO THE TIME OF THE CHAPTER TEST ON HW NO. SECTIONS (Brown Book) ASSIGNMENT DUE V 1 1 1/1 Practice Set A V 1 3 Practice Set B #1 1 V B 1
Huw W. Lewis *, Dawn L. Harrison and Malcolm Kitchen Met Office, United Kingdom
 2.6 LOCAL VERTICAL PROFILE CORRECTIONS USING DATA FROM MULTIPLE SCAN ELEVATIONS Huw W. Lewis *, Dawn L. Harrison and Malcolm Kitchen Met Office, United Kingdom 1. INTRODUCTION The variation of reflectivity
2.6 LOCAL VERTICAL PROFILE CORRECTIONS USING DATA FROM MULTIPLE SCAN ELEVATIONS Huw W. Lewis *, Dawn L. Harrison and Malcolm Kitchen Met Office, United Kingdom 1. INTRODUCTION The variation of reflectivity
Least squares and Eigenvalues
 Lab 1 Least squares and Eigenvalues Lab Objective: Use least squares to fit curves to data and use QR decomposition to find eigenvalues. Least Squares A linear system Ax = b is overdetermined if it has
Lab 1 Least squares and Eigenvalues Lab Objective: Use least squares to fit curves to data and use QR decomposition to find eigenvalues. Least Squares A linear system Ax = b is overdetermined if it has
Conditions for Segmentation of Motion with Affine Fundamental Matrix
 Conditions for Segmentation of Motion with Affine Fundamental Matrix Shafriza Nisha Basah 1, Reza Hoseinnezhad 2, and Alireza Bab-Hadiashar 1 Faculty of Engineering and Industrial Sciences, Swinburne University
Conditions for Segmentation of Motion with Affine Fundamental Matrix Shafriza Nisha Basah 1, Reza Hoseinnezhad 2, and Alireza Bab-Hadiashar 1 Faculty of Engineering and Industrial Sciences, Swinburne University
Computational Modeling of N-body Collisions
 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems IROS Congress Center Hamburg Sept 28 - Oct 2, 2015. Hamburg, Germany Computational Modeling of N-body Collisions Feifei Wang, Huan
2015 IEEE/RSJ International Conference on Intelligent Robots and Systems IROS Congress Center Hamburg Sept 28 - Oct 2, 2015. Hamburg, Germany Computational Modeling of N-body Collisions Feifei Wang, Huan
MIRA, SVM, k-nn. Lirong Xia
 MIRA, SVM, k-nn Lirong Xia Linear Classifiers (perceptrons) Inputs are feature values Each feature has a weight Sum is the activation activation w If the activation is: Positive: output +1 Negative, output
MIRA, SVM, k-nn Lirong Xia Linear Classifiers (perceptrons) Inputs are feature values Each feature has a weight Sum is the activation activation w If the activation is: Positive: output +1 Negative, output
Vector Operations. Vector Operations. Graphical Operations. Component Operations. ( ) ˆk
 ˆk") Vector Operations Vector Operations ME 202 Multiplication by a scalar Addition/subtraction Scalar multiplication (dot product) Vector multiplication (cross product) 1 2 Graphical Operations Component Operations
Vector Operations Vector Operations ME 202 Multiplication by a scalar Addition/subtraction Scalar multiplication (dot product) Vector multiplication (cross product) 1 2 Graphical Operations Component Operations
Lecture 7: Finding Features (part 2/2)
") Lecture 7: Finding Features (part 2/2) Professor Fei- Fei Li Stanford Vision Lab Lecture 7 -! 1 What we will learn today? Local invariant features MoHvaHon Requirements, invariances Keypoint localizahon
Lecture 7: Finding Features (part 2/2) Professor Fei- Fei Li Stanford Vision Lab Lecture 7 -! 1 What we will learn today? Local invariant features MoHvaHon Requirements, invariances Keypoint localizahon
For at finde den danske version af prøven, begynd i den modsatte ende!
 For at finde den danske version af prøven, begynd i den modsatte ende! Please disregard the Danish version on the back if you participate in this English version of the exam. Exam in Calculus First Year
For at finde den danske version af prøven, begynd i den modsatte ende! Please disregard the Danish version on the back if you participate in this English version of the exam. Exam in Calculus First Year
Lecture 7: Finding Features (part 2/2)
") Lecture 7: Finding Features (part 2/2) Dr. Juan Carlos Niebles Stanford AI Lab Professor Fei- Fei Li Stanford Vision Lab 1 What we will learn today? Local invariant features MoPvaPon Requirements, invariances
Lecture 7: Finding Features (part 2/2) Dr. Juan Carlos Niebles Stanford AI Lab Professor Fei- Fei Li Stanford Vision Lab 1 What we will learn today? Local invariant features MoPvaPon Requirements, invariances
Roadmap. Introduction to image analysis (computer vision) Theory of edge detection. Applications
 Theory of edge detection. Applications") Edge Detection Roadmap Introduction to image analysis (computer vision) Its connection with psychology and neuroscience Why is image analysis difficult? Theory of edge detection Gradient operator Advanced
Edge Detection Roadmap Introduction to image analysis (computer vision) Its connection with psychology and neuroscience Why is image analysis difficult? Theory of edge detection Gradient operator Advanced
Analytic Trigonometry. Copyright Cengage Learning. All rights reserved.
 Analytic Trigonometry Copyright Cengage Learning. All rights reserved. 7.1 Trigonometric Identities Copyright Cengage Learning. All rights reserved. Objectives Simplifying Trigonometric Expressions Proving
Analytic Trigonometry Copyright Cengage Learning. All rights reserved. 7.1 Trigonometric Identities Copyright Cengage Learning. All rights reserved. Objectives Simplifying Trigonometric Expressions Proving
Unit IV: Introduction to Vector Analysis
 Unit IV: Introduction to Vector nalysis s you learned in the last unit, there is a difference between speed and velocity. Speed is an example of a scalar: a quantity that has only magnitude. Velocity is
Unit IV: Introduction to Vector nalysis s you learned in the last unit, there is a difference between speed and velocity. Speed is an example of a scalar: a quantity that has only magnitude. Velocity is
Method 1: Geometric Error Optimization
 Method 1: Geometric Error Optimization we need to encode the constraints ŷ i F ˆx i = 0, rank F = 2 idea: reconstruct 3D point via equivalent projection matrices and use reprojection error equivalent projection
Method 1: Geometric Error Optimization we need to encode the constraints ŷ i F ˆx i = 0, rank F = 2 idea: reconstruct 3D point via equivalent projection matrices and use reprojection error equivalent projection
INF Shape descriptors
 3.09.09 Shape descriptors Anne Solberg 3.09.009 1 Mandatory exercise1 http://www.uio.no/studier/emner/matnat/ifi/inf4300/h09/undervisningsmateriale/inf4300 termprojecti 009 final.pdf / t / / t t/ifi/inf4300/h09/
3.09.09 Shape descriptors Anne Solberg 3.09.009 1 Mandatory exercise1 http://www.uio.no/studier/emner/matnat/ifi/inf4300/h09/undervisningsmateriale/inf4300 termprojecti 009 final.pdf / t / / t t/ifi/inf4300/h09/
Lesson 4-A. = 2.2, a = 2.0, b = 0.5 = 1.0, 2 = 3.0, 3
 Lesson 4-A Procedures in Computational Kinematics For computational kinematics, we consider two solution methods: Coordinate Partitioning method Appended Constraint method These methods are introduced
Lesson 4-A Procedures in Computational Kinematics For computational kinematics, we consider two solution methods: Coordinate Partitioning method Appended Constraint method These methods are introduced
Types of Real Integrals
 Math B: Complex Variables Types of Real Integrals p(x) I. Integrals of the form P.V. dx where p(x) and q(x) are polynomials and q(x) q(x) has no eros (for < x < ) and evaluate its integral along the fol-
Math B: Complex Variables Types of Real Integrals p(x) I. Integrals of the form P.V. dx where p(x) and q(x) are polynomials and q(x) q(x) has no eros (for < x < ) and evaluate its integral along the fol-
Simple Co-ordinate geometry problems
 Simple Co-ordinate geometry problems 1. Find the equation of straight line passing through the point P(5,2) with equal intercepts. 1. Method 1 Let the equation of straight line be + =1, a,b 0 (a) If a=b
Simple Co-ordinate geometry problems 1. Find the equation of straight line passing through the point P(5,2) with equal intercepts. 1. Method 1 Let the equation of straight line be + =1, a,b 0 (a) If a=b