CS 534: Computer Vision Segmentation III Statistical Nonparametric Methods for Segmentation
|
|
|
- Arline Elliott
- 6 years ago
- Views:
Transcription
1 CS 534: Computer Vision Segmentation III Statistical Nonparametric Methods for Segmentation Ahmed Elgammal Dept of Computer Science CS 534 Segmentation III- Nonparametric Methods Outlines Density estimation Nonparametric kernel density estimation Mean shift Mean shift clustering Mean shift filtering and segmentation CS 534 Segmentation III- Nonparametric Methods
2 Statistical Background Density Estimation: Given a sample S={x i } i=1..n from a distribution obtain an estimate of the density function at any point. Parametric : Assume a parametric density family f (. θ), (ex. N(µ,σ 2 ) ) and obtain the best estimator of θ Advantages: Efficient Robust to noise: robust estimators can be used Problem with parametric methods An incorrectly specified parametric model has a bias that cannot be removed even by large number of samples. Nonparametric : directly obtain a good estimate from the sample. Most famous example: Histogram of the entire density CS 534 Segmentation III- Nonparametric Methods Kernel Density Estimation 1950s + (Fix & Hodges 51, Rosenblatt 56, Parzen 62, Cencov 62) Given a set of samples S={x i } i=1..n we can obtain an estimate for the density at x as: CS 534 Segmentation III- Nonparametric Methods
3 x i x i x i x i x i i x i x i x i where K h (t)=k(t/h)/h called kernel function (window function) h : scale or bandwidth K satisfies certain conditions, e.g.: CS 534 Segmentation III- Nonparametric Methods Kernel Estimation A variety of kernel shapes with different properties. Gaussian kernel is typically used for its continuity and differentiability. Multivariate case: Kernel Product Use same kernel function with different bandwidth h for each dimension. General form: avoid to store all the samples CS 534 Segmentation III- Nonparametric Methods

4 Kernel Density Estimation Advantages: Converge to any density shape with sufficient samples. asymptotically the estimate converges to any density. No need for model specification. Unlike histograms, density estimates are smooth, continuous and differentiable. Easily generalize to higher dimensions. All other parametric/nonparametric density estimation methods, e.g., histograms, are asymptotically kernel methods. In computer vision, the densities are multivariate and multimodal with irregular cluster shapes. CS 534 Segmentation III- Nonparametric Methods Example: color clusters Cluster shapes are irregular Cluster boundaries are not well defined. CS 534 Segmentation III- Nonparametric Methods
5 Conversion - KDE Estimation using Gaussian Kernel Estimation using Uniform Kernel CS 534 Segmentation III- Nonparametric Methods Conversion - KDE Estimation using Gaussian Kernel Estimation using Uniform Kernel CS 534 Segmentation III- Nonparametric Methods
6 Scale selection Important problem. Large literature. Small h results in ragged densities. Large h results in over smoothing. Best choice for h depends on the number of samples: small n, wide kernels large n, Narrow kernels CS 534 Segmentation III- Nonparametric Methods Optimal scale Optimal kernel and optimal scale can be achieved by minimizing the mean integrated square error if we know the density! Normal reference rule: CS 534 Segmentation III- Nonparametric Methods
7 Scale selection CS 534 Segmentation III- Nonparametric Methods From R. O. Duda, P. E. Hart, and D. G. Stork. Pattern Classification Wiley, New York, 2nd edition, 2000 CS 534 Segmentation III- Nonparametric Methods
8 Mean Shift Given a sample S={s i :s i R n } and a kernel K, the sample mean using K at point x: Iteration of the form x m(x) will lead to the density local mode Let x is the center of the window Iterate until conversion. Compute the sample mean m(x) from the samples inside the window. Replace x with m(x) CS 534 Segmentation III- Nonparametric Methods Mean Shift Given a sample S={s i :s i R n } and a kernel K, the sample mean using K at point x: Fukunaga and Hostler 1975 introduced the mean shift as the difference m(x)-x using a flat kernel. Iteration of the form x m(x) will lead to the density mode Cheng 1995 generalized the definition using general kernels and weighted data Recently popularized by D. Comaniciu and P. Meer 99+ Applications: Clustering[Cheng,Fu 85], image filtering, segmentation [Meer 99] and tracking [Meer 00]. CS 534 Segmentation III- Nonparametric Methods
9 Mean Shift Iterations of the form x m(x) are called mean shift algorithm. If K is a Gaussian (e.g.) and the density estimate using K is Using Gaussian Kernel K σ (x), the derivative is we can show that: the mean shift is in the gradient direction of the density estimate. CS 534 Segmentation III- Nonparametric Methods Mean Shift The mean shift is in the gradient direction of the density estimate. Successive iterations would converge to a local maxima of the density, i.e., a stationary point: m(x)=x. Mean shift is a steepest-ascent like procedure with variable size steps that leads to fast convergence well-adjusted steepest ascent. CS 534 Segmentation III- Nonparametric Methods

10 CS 534 Segmentation III- Nonparametric Methods Mean shift and Image Filtering Discontinuity preserving smoothing Recall, average or Gaussian filters blur images and do not preserve region boundaries. Mean shift application: Represent each pixel x as spatial location x s and range x r (color, intensity) Look for modes in the joint spatial-range space Use a product of two kernels: a spatial kernel with bandwidth h s and a range kernel with bandwidth h r Algorithm: For each pixel x i =(x is,x ir ) apply mean shift until conversion. Let the conversion point be (y is,y ir ) Assign z i = (x is,y ir ) as filter output Results: see the paper. CS 534 Segmentation III- Nonparametric Methods

11 CS 534 Segmentation III- Nonparametric Methods CS 534 Segmentation III- Nonparametric Methods
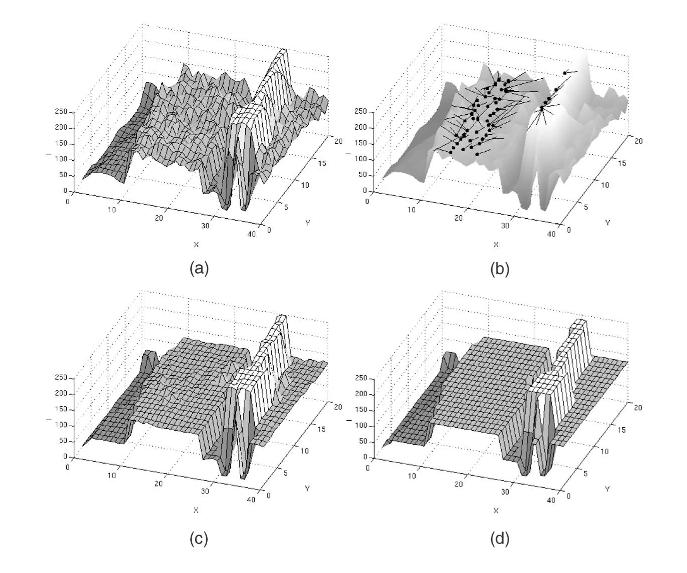
12 CS 534 A. Elgammal!"# $%%% &'()*(+&$,)*,) -(&&%') ()(./*$* ()0 1(+2$)% $)&%..$3%)+%4 1(/ #99# CS 534 Segmentation III- Nonparametric Methods :;<6 86 1'200( ;=><?6,@;<;A>B >AC D;BE?@?C6!"# $%%&$'%()* +)&'# +(#,- -#+(*#- (*./01 (2 ')345%#- $% #$'" 4(6#, $2 $ 7#'%)& 253 )+ 4$(&8(2# $++(*(%(#2 9#%8##* %"# '5&&#*% 4(6#, $*- $,, )%"#& 4(6#,2: 8(%" 2(3(,$&(%; 3#$25&#(* 9)%" 24$%($, $*- &$*<# -)3$(*2=!"# &#<()* 9)5*-$&(#2 $&# %"#* (-#*%(+(#- $2,)'( 8"#&# %"# +)&'# 7#'%)&2 -(7#&<#= >% (2 (*%#%(*< %) *)%# %"$%: +)& $ <(7#* 4(6#,: %"# 3$<*(%5-# $*- )&(#*%$%()* )+ %"# +)&'# +(#,- $&# 2(3(,$& %) %")2# )+ %"#?)(*% -)3$(* 3#$* 2"(+% 7#'%)& ')345%#- $% %"$% 4(6#, $*4&)?#'%#- (*%) %"# 24$%($, (* ')*%&$2% %)./01: %"# 3#$* 2"(+% 4&)'#-5&# 3)7#2 (* %"# -(&#'%()* )+ %"(2 7#'%)&: $8$; +&)3 %"# 9)5*-$&(#2=!"# #-<# +,)8 (*.AB1 (2 )9%$(*#- $% #$'",)'$%()* +)& $ <(7#* 2#% )+ -(&#'%()*2 $2 %"# 3$<*(%5-# )+ %"# <&$-(#*% )+ $ 23))%"#- (3$<#=!"# 9)5*-$&(#2 $&# -#%#'%#- $% (3$<#,)'$%()*2 8"('" #*')5*%#& %8) )44)2(%# -(&#'%()*2 )+ +,)8=!"# C5$*%(D$%()* )+ %"# #-<# +,)8 -(&#'%()*: ")8#7#&: 3$; (*%&)-5'# $&%(+$'%2= E#'$,, %"$% %"# -(&#'%()* )+ %"# 3#$* 2"(+% (2 -('%$%#- 2),#,; 9; %"# -$%$=!"# 3#$* 2"(+% 4&)'#-5&#F9$2#- (3$<# 2#<3#*%$%()* (2 $ 2%&$(<"%+)&8$&- #6%#*2()* )+ %"# -(2')*%(*5(%; 4#&7(*< 23))%"(*< $,<)&(%"3= G$'" 4(6#, (2 $22)'($%#- 8(%" $!"#$"%"&'$( 3)-# )+ %"#?)(*% -)3$(* -#*2(%;,)'$%#- (* (%2 *#(<"9)&"))-: $+%#& *#$&9; 3)-#2 8#&# 4&5*#- $2 (* %"# <#*#&(' +#$%5&# 24$'# $*$,;2(2 %#'"*(C5# HI#'%()* AJ= 5,.6 #74 ),6 84!"#"$ %&'( )*+,- )&./&(-'-+0( K#%!! $*- "! "!!!" " " " " #: 9# %"# $#$%&'()%*(+, (*45% $*+(,%#&#- (3$<# 4(6#,2 (* %"#?)(*% 24$%($,F&$*<# -)3$(* $*%! %"#,$9#, )+ %"#!-. 4(6#, (* %"# 2#<3#*%#- (3$<#=!" E5* %"# 3#$* 2"(+% +(,%#&(*< 4&)'#-5&# +)& %"# (3$<# $*- 2%)&# ')) %"# (*+)&3$%()* $9)5% %"# $#$%&'()%*(+, ')*7#&<#*'# 4)(*% (* "! : (=#=: "!! #!"& =! " #" L#,(*#$%# (* %"#?)(*% -)3$(* %"# ',52%#&2 $' '!!"""( 9; <&)54(*< %)<#%"#& ')) "! 8"('" $&# ',)2#& %"$* )* (* %"# 24$%($, -)3$(* $*- )+ (* %"# &$*<# -)3$(*: (=#=: ')*'$%#*$%# %"# 9$2(*2 )+ $%%&$'%()* )+ %"# ')&)*-(*< ')*7#&<#*'# 4)(*%2= $" M)& #$'"!!!" " " " " #: $22(<* %!! "' # "! $ $' %= %" N4%()*$,O G,(3(*$%# 24$%($, &#<()*2 ')*%$(*(*<,#22 %"$*, 4(6#,2=!"# ',52%#& -#,(*#$%()* 2%#4 '$* 9# &#+(*#- $'')&-(*< %) $ 4&()&( (*+)&3$%()* $*-: %"52: 4";2('2F9$2#- 2#<3#*%$%()* $,<)&(%"32: #=<=:.P1:.A/1: '$* 9# (*')&4)&$%#-= I(*'# %"(2 4&)'#22 (2 4#&+)&3#- )* &#<()* $-?$'#*'; <&$4"2: "(#&$&'"F ('$, %#'"*(C5#2,(Q#.AR1 '$* 4&)7(-# 2(<*(+('$*% 24##-F54=!"# #++#'% )+ %"# ',52%#& -#,(*#$%()* 2%#4 (2 2")8* (* M(<= B-= S)%# %"# +52()* (*%),$&<#& ")3)<#*#)52 &#<()*2 )+ %"# CS 534 Segmentation III- Nonparametric Methods

& 253 )+ 4$(&8(2# $++(*(%(#2 9#%8##* %\"# *% 4(6#, $*- $,, )%\"#& 4(6#,2: 8(%\" 2(3(,$&(%; 3#$25&#%\" 24$%($, $*- &$*<# -)3$(*2=!")
& ')345%#- $% %\"$% 4(6#, $*'%#- (*%) %\"# 24$%($, -)3$(*= @)8#7#&: (* ')*%&$2% %) \"# 3#$* 2\"(+% 4&)'#-5&# 3)7#2 (* %\"# -(&#'%()* )+ %\"(2 &: $8$; +&)3 %\"# 9)5*-$&(#2= # #-<# +,)8 (*.")
13 CS 534 A. Elgammal Mean Shift and Segmentation Similar to filtering but group clusters from the filtered image: group together all zi which are closer than hs in the spatial domain and closer than$%hr in the range # $%%&$'%()* +)&'# +(#,- -#+(*#- (*./01 (2 ')345%#!"#"$ %&'( domain. )*+,- )&./&(-'-+0( 1'200( ;=><?6,@;<;A>B >AC D;BE?@?C6 4(6#, $2 $ 7#'%)& 253 )+ 4$(&8(2# $++(*(%(#2 9#%8##* %"# *% 4(6#, $*- $,, )%"#& 4(6#,2: 8(%" 2(3(,$&(%; 3#$25&#%" 24$%($, $*- &$*<# -)3$(*2=!"# &#<()* 9)5*-$&(#2 #* (-#*%(+(#- $2,)'( 8"#&# %"# +)&'# 7#'%)&2 -(7#&<#= >% #%(*< %) *)%# %"$%: +)& $ <(7#* 4(6#,: %"# 3$<*(%5-# &(#*%$%()* )+ %"# +)&'# +(#,- $&# 2(3(,$& %) %")2# )+ %"# -)3$(* 3#$* 2"(+% 7#'%)& ')345%#- $% %"$% 4(6#, $*'%#- (*%) %"# 24$%($, (* ')*%&$2% %) "# 3#$* 2"(+% 4&)'#-5&# 3)7#2 (* %"# -(&#'%()* )+ %"(2 &: $8$; +&)3 %"# 9)5*-$&(#2= # #-<# +,)8 (*.AB1 (2 )9%$(*#- $% #$'",)'$%()* +)& $ 2#% )+ -(&#'%()*2 $2 %"# 3$<*(%5-# )+ %"# <&$-(#*% )+ $ %"#- (3$<#=!"# 9)5*-$&(#2 $&# -#%#'%#- $% (3$<# )*2 8"('" #*')5*%#& %8) )44)2(%# -(&#'%()*2 )+ +,)8= 5$*%(D$%()* )+ %"# #-<# +,)8 -(&#'%()*: ")8#7#&: 3$; -5'# $&%(+$'%2= E#'$,, %"$% %"# -(&#'%()* )+ %"# 3#$* 2 -('%$%#- 2),#,; 9; %"# -$%$= # 3#$* 2"(+% 4&)'#-5&#F9$2#- (3$<# 2#<3#*%$%()* (2 $ "%+)&8$&- #6%#*2()* )+ %"# -(2')*%(*5(%; 4#&7(*< %"(*< $,<)&(%"3= G$'" 4(6#, (2 $22)'($%#- 8(%" $ &'$( 3)-# )+ %"#?)(*% -)3$(* -#*2(%;,)'$%#- (* (%2 9)&"))-: $+%#& *#$&9; 3)-#2 8#&# 4&5*#- $2 (* %"# (' +#$%5&# 24$'# $*$,;2(2 %#'"*(C5# HI#'%()* AJ= K#%!! $*- "! "!!!" " " " " #: 9# %"# $#$%&'()%*(+, (*45% $*+(,%#&#- (3$<# 4(6#,2 (* %"#?)(*% 24$%($,F&$*<# -)3$(* $*%! %"#,$9#, )+ %"#!-. 4(6#, (* %"# 2#<3#*%#- (3$<#=!" E5* %"# 3#$* 2"(+% +(,%#&(*< 4&)'#-5&# +)& %"# (3$<# $*- 2%)&# ')) %"# (*+)&3$%()* $9)5% %"# $#$%&'()%*(+, ')*7#&<#*'# 4)(*% (* "! : (=#=: "!! #!"& =! " #" L#,(*#$%# (* %"#?)(*% -)3$(* %"# ',52%#&2 $' '!!"""( 9; <&)54(*< %)<#%"#& ')) "! 8"('" $&# ',)2#& %"$* )* (* %"# 24$%($, -)3$(* $*- )+ (* %"# &$*<# -)3$(*: (=#=: ')*'$%#*$%# %"# 9$2(*2 )+ $%%&$'%()* )+ %"# ')&)*-(*< ')*7#&<#*'# 4)(*%2= $" M)& #$'"!!!" " " " " #: $22(<* %!! "' # "! $ $' %= %" N4%()*$,O G,(3(*$%# 24$%($, &#<()*2 ')*%$(*(*<,#22 %"$*, 4(6#,2=!"# ',52%#& -#,(*#$%()* 2%#4 '$* 9# &#+(*#- $'')&-(*< %) $ 4&()&( (*+)&3$%()* $*-: %"52: 4";2('2F9$2#- 2#<3#*%$%()* $,<)&(%"32: #=<=:.P1:.A/1: '$* 9# (*')&4)&$%#-= I(*'# %"(2 CS 534 Segmentation III- Nonparametric Methods &)'#22 (2 4#&+)&3#- )* &#<()* $-?$'#*'; <&$4"2: "(#&$&'"F ('$, %#'"*(C5#2,(Q#.AR1 '$* 4&)7(-# 2(<*(+('$*% 24##-F54=!"# #++#'% )+ %"# ',52%#& -#,(*#$%()* 2%#4 (2 2")8* (* M(<= B-= S)%# %"# +52()* (*%),$&<#& ")3)<#*#)52 &#<()*2 )+ %"# CS 534 Segmentation III- Nonparametric Methods

14 Meanshift tracking!""#$%$&'#()$*#+, -%$'./&0 '1%%#&2,3%$4#,5 "%#6/71*,87'$2/7& 8/.#8/=77+,76#% 7BC#'2,87'$2/7& '1%%#&2,87'$2/7& $""#$%$&'#,47+#8 ;#<0<,/4$0#,2#4"8$2#D,7% 97+#(:##./&0 "$%2/'8#,3/82#%/&0A '787%>,/&2#&*/2E>,#+0#,=/*270%$4*A Slide from R. Collins CS 534 Segmentation III- Nonparametric Methods Sources R. O. Duda, P. E. Hart, and D. G. Stork. Pattern Classification. Wiley, New York, 2nd edition, 2000 CS 534 Segmentation III- Nonparametric Methods
CS 556: Computer Vision. Lecture 21
 CS 556: Computer Vision Lecture 21 Prof. Sinisa Todorovic sinisa@eecs.oregonstate.edu 1 Meanshift 2 Meanshift Clustering Assumption: There is an underlying pdf governing data properties in R Clustering
CS 556: Computer Vision Lecture 21 Prof. Sinisa Todorovic sinisa@eecs.oregonstate.edu 1 Meanshift 2 Meanshift Clustering Assumption: There is an underlying pdf governing data properties in R Clustering
Mean-Shift Tracker Computer Vision (Kris Kitani) Carnegie Mellon University
 Carnegie Mellon University") Mean-Shift Tracker 16-385 Computer Vision (Kris Kitani) Carnegie Mellon University Mean Shift Algorithm A mode seeking algorithm Fukunaga & Hostetler (1975) Mean Shift Algorithm A mode seeking algorithm
Mean-Shift Tracker 16-385 Computer Vision (Kris Kitani) Carnegie Mellon University Mean Shift Algorithm A mode seeking algorithm Fukunaga & Hostetler (1975) Mean Shift Algorithm A mode seeking algorithm
Nonparametric Methods Lecture 5
 Nonparametric Methods Lecture 5 Jason Corso SUNY at Buffalo 17 Feb. 29 J. Corso (SUNY at Buffalo) Nonparametric Methods Lecture 5 17 Feb. 29 1 / 49 Nonparametric Methods Lecture 5 Overview Previously,
Nonparametric Methods Lecture 5 Jason Corso SUNY at Buffalo 17 Feb. 29 J. Corso (SUNY at Buffalo) Nonparametric Methods Lecture 5 17 Feb. 29 1 / 49 Nonparametric Methods Lecture 5 Overview Previously,
Robert Collins CSE598G Mean-Shift Blob Tracking through Scale Space
 Mean-Shift Blob Tracking through Scale Space Robert Collins, CVPR 03 Abstract Mean-shift tracking Choosing scale of kernel is an issue Scale-space feature selection provides inspiration Perform mean-shift
Mean-Shift Blob Tracking through Scale Space Robert Collins, CVPR 03 Abstract Mean-shift tracking Choosing scale of kernel is an issue Scale-space feature selection provides inspiration Perform mean-shift
A NOTE ON THE CHOICE OF THE SMOOTHING PARAMETER IN THE KERNEL DENSITY ESTIMATE
 BRAC University Journal, vol. V1, no. 1, 2009, pp. 59-68 A NOTE ON THE CHOICE OF THE SMOOTHING PARAMETER IN THE KERNEL DENSITY ESTIMATE Daniel F. Froelich Minnesota State University, Mankato, USA and Mezbahur
BRAC University Journal, vol. V1, no. 1, 2009, pp. 59-68 A NOTE ON THE CHOICE OF THE SMOOTHING PARAMETER IN THE KERNEL DENSITY ESTIMATE Daniel F. Froelich Minnesota State University, Mankato, USA and Mezbahur
Curve Fitting Re-visited, Bishop1.2.5
 Curve Fitting Re-visited, Bishop1.2.5 Maximum Likelihood Bishop 1.2.5 Model Likelihood differentiation p(t x, w, β) = Maximum Likelihood N N ( t n y(x n, w), β 1). (1.61) n=1 As we did in the case of the
Curve Fitting Re-visited, Bishop1.2.5 Maximum Likelihood Bishop 1.2.5 Model Likelihood differentiation p(t x, w, β) = Maximum Likelihood N N ( t n y(x n, w), β 1). (1.61) n=1 As we did in the case of the
CS 664 Segmentation (2) Daniel Huttenlocher
 Daniel Huttenlocher") CS 664 Segmentation (2) Daniel Huttenlocher Recap Last time covered perceptual organization more broadly, focused in on pixel-wise segmentation Covered local graph-based methods such as MST and Felzenszwalb-Huttenlocher
CS 664 Segmentation (2) Daniel Huttenlocher Recap Last time covered perceptual organization more broadly, focused in on pixel-wise segmentation Covered local graph-based methods such as MST and Felzenszwalb-Huttenlocher
Improved Fast Gauss Transform. Fast Gauss Transform (FGT)
") 10/11/011 Improved Fast Gauss Transform Based on work by Changjiang Yang (00), Vikas Raykar (005), and Vlad Morariu (007) Fast Gauss Transform (FGT) Originally proposed by Greengard and Strain (1991) to
10/11/011 Improved Fast Gauss Transform Based on work by Changjiang Yang (00), Vikas Raykar (005), and Vlad Morariu (007) Fast Gauss Transform (FGT) Originally proposed by Greengard and Strain (1991) to
Efficient Inference in Fully Connected CRFs with Gaussian Edge Potentials
 Efficient Inference in Fully Connected CRFs with Gaussian Edge Potentials by Phillip Krahenbuhl and Vladlen Koltun Presented by Adam Stambler Multi-class image segmentation Assign a class label to each
Efficient Inference in Fully Connected CRFs with Gaussian Edge Potentials by Phillip Krahenbuhl and Vladlen Koltun Presented by Adam Stambler Multi-class image segmentation Assign a class label to each
Statistical and Learning Techniques in Computer Vision Lecture 2: Maximum Likelihood and Bayesian Estimation Jens Rittscher and Chuck Stewart
 Statistical and Learning Techniques in Computer Vision Lecture 2: Maximum Likelihood and Bayesian Estimation Jens Rittscher and Chuck Stewart 1 Motivation and Problem In Lecture 1 we briefly saw how histograms
Statistical and Learning Techniques in Computer Vision Lecture 2: Maximum Likelihood and Bayesian Estimation Jens Rittscher and Chuck Stewart 1 Motivation and Problem In Lecture 1 we briefly saw how histograms
Instance-based Learning CE-717: Machine Learning Sharif University of Technology. M. Soleymani Fall 2016
 Instance-based Learning CE-717: Machine Learning Sharif University of Technology M. Soleymani Fall 2016 Outline Non-parametric approach Unsupervised: Non-parametric density estimation Parzen Windows Kn-Nearest
Instance-based Learning CE-717: Machine Learning Sharif University of Technology M. Soleymani Fall 2016 Outline Non-parametric approach Unsupervised: Non-parametric density estimation Parzen Windows Kn-Nearest
PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 2: PROBABILITY DISTRIBUTIONS
 PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 2: PROBABILITY DISTRIBUTIONS Parametric Distributions Basic building blocks: Need to determine given Representation: or? Recall Curve Fitting Binary Variables
PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 2: PROBABILITY DISTRIBUTIONS Parametric Distributions Basic building blocks: Need to determine given Representation: or? Recall Curve Fitting Binary Variables
Lecture Notes on the Gaussian Distribution
 Lecture Notes on the Gaussian Distribution Hairong Qi The Gaussian distribution is also referred to as the normal distribution or the bell curve distribution for its bell-shaped density curve. There s
Lecture Notes on the Gaussian Distribution Hairong Qi The Gaussian distribution is also referred to as the normal distribution or the bell curve distribution for its bell-shaped density curve. There s
Improved Fast Gauss Transform. (based on work by Changjiang Yang and Vikas Raykar)
") Improved Fast Gauss Transform (based on work by Changjiang Yang and Vikas Raykar) Fast Gauss Transform (FGT) Originally proposed by Greengard and Strain (1991) to efficiently evaluate the weighted sum
Improved Fast Gauss Transform (based on work by Changjiang Yang and Vikas Raykar) Fast Gauss Transform (FGT) Originally proposed by Greengard and Strain (1991) to efficiently evaluate the weighted sum
Machine vision. Summary # 4. The mask for Laplacian is given
 1 Machine vision Summary # 4 The mask for Laplacian is given L = 0 1 0 1 4 1 (6) 0 1 0 Another Laplacian mask that gives more importance to the center element is L = 1 1 1 1 8 1 (7) 1 1 1 Note that the
1 Machine vision Summary # 4 The mask for Laplacian is given L = 0 1 0 1 4 1 (6) 0 1 0 Another Laplacian mask that gives more importance to the center element is L = 1 1 1 1 8 1 (7) 1 1 1 Note that the
Machine vision, spring 2018 Summary 4
 Machine vision Summary # 4 The mask for Laplacian is given L = 4 (6) Another Laplacian mask that gives more importance to the center element is given by L = 8 (7) Note that the sum of the elements in the
Machine vision Summary # 4 The mask for Laplacian is given L = 4 (6) Another Laplacian mask that gives more importance to the center element is given by L = 8 (7) Note that the sum of the elements in the
Pattern Recognition Problem. Pattern Recognition Problems. Pattern Recognition Problems. Pattern Recognition: OCR. Pattern Recognition Books
 Introduction to Statistical Pattern Recognition Pattern Recognition Problem R.P.W. Duin Pattern Recognition Group Delft University of Technology The Netherlands prcourse@prtools.org What is this? What
Introduction to Statistical Pattern Recognition Pattern Recognition Problem R.P.W. Duin Pattern Recognition Group Delft University of Technology The Netherlands prcourse@prtools.org What is this? What
Gaussian mean-shift algorithms
 Gaussian mean-shift algorithms Miguel Á. Carreira-Perpiñán Dept. of Computer Science & Electrical Engineering, OGI/OHSU http://www.csee.ogi.edu/~miguel Gaussian mean-shift (GMS) as an EM algorithm Gaussian
Gaussian mean-shift algorithms Miguel Á. Carreira-Perpiñán Dept. of Computer Science & Electrical Engineering, OGI/OHSU http://www.csee.ogi.edu/~miguel Gaussian mean-shift (GMS) as an EM algorithm Gaussian
Edges and Scale. Image Features. Detecting edges. Origin of Edges. Solution: smooth first. Effects of noise
 Edges and Scale Image Features From Sandlot Science Slides revised from S. Seitz, R. Szeliski, S. Lazebnik, etc. Origin of Edges surface normal discontinuity depth discontinuity surface color discontinuity
Edges and Scale Image Features From Sandlot Science Slides revised from S. Seitz, R. Szeliski, S. Lazebnik, etc. Origin of Edges surface normal discontinuity depth discontinuity surface color discontinuity
Mean Shift is a Bound Optimization
 IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL.??, NO.??, MONTH YEAR 1 Mean Shift is a Bound Optimization Mark Fashing and Carlo Tomasi, Member, IEEE M. Fashing and C. Tomasi are with
IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL.??, NO.??, MONTH YEAR 1 Mean Shift is a Bound Optimization Mark Fashing and Carlo Tomasi, Member, IEEE M. Fashing and C. Tomasi are with
ECE Digital Image Processing and Introduction to Computer Vision. Outline
 2/9/7 ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 207. Recap Outline 2. Sharpening Filtering Illustration
2/9/7 ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 207. Recap Outline 2. Sharpening Filtering Illustration
Edge Detection. CS 650: Computer Vision
 CS 650: Computer Vision Edges and Gradients Edge: local indication of an object transition Edge detection: local operators that find edges (usually involves convolution) Local intensity transitions are
CS 650: Computer Vision Edges and Gradients Edge: local indication of an object transition Edge detection: local operators that find edges (usually involves convolution) Local intensity transitions are
Nonparametric probability density estimation
 A temporary version for the 2018-04-11 lecture. Nonparametric probability density estimation Václav Hlaváč Czech Technical University in Prague Czech Institute of Informatics, Robotics and Cybernetics
A temporary version for the 2018-04-11 lecture. Nonparametric probability density estimation Václav Hlaváč Czech Technical University in Prague Czech Institute of Informatics, Robotics and Cybernetics
12 - Nonparametric Density Estimation
 ST 697 Fall 2017 1/49 12 - Nonparametric Density Estimation ST 697 Fall 2017 University of Alabama Density Review ST 697 Fall 2017 2/49 Continuous Random Variables ST 697 Fall 2017 3/49 1.0 0.8 F(x) 0.6
ST 697 Fall 2017 1/49 12 - Nonparametric Density Estimation ST 697 Fall 2017 University of Alabama Density Review ST 697 Fall 2017 2/49 Continuous Random Variables ST 697 Fall 2017 3/49 1.0 0.8 F(x) 0.6
Lecture 6: Edge Detection. CAP 5415: Computer Vision Fall 2008
 Lecture 6: Edge Detection CAP 5415: Computer Vision Fall 2008 Announcements PS 2 is available Please read it by Thursday During Thursday lecture, I will be going over it in some detail Monday - Computer
Lecture 6: Edge Detection CAP 5415: Computer Vision Fall 2008 Announcements PS 2 is available Please read it by Thursday During Thursday lecture, I will be going over it in some detail Monday - Computer
Reading. 3. Image processing. Pixel movement. Image processing Y R I G Q
 Reading Jain, Kasturi, Schunck, Machine Vision. McGraw-Hill, 1995. Sections 4.-4.4, 4.5(intro), 4.5.5, 4.5.6, 5.1-5.4. 3. Image processing 1 Image processing An image processing operation typically defines
Reading Jain, Kasturi, Schunck, Machine Vision. McGraw-Hill, 1995. Sections 4.-4.4, 4.5(intro), 4.5.5, 4.5.6, 5.1-5.4. 3. Image processing 1 Image processing An image processing operation typically defines
Econ 582 Nonparametric Regression
 Econ 582 Nonparametric Regression Eric Zivot May 28, 2013 Nonparametric Regression Sofarwehaveonlyconsideredlinearregressionmodels = x 0 β + [ x ]=0 [ x = x] =x 0 β = [ x = x] [ x = x] x = β The assume
Econ 582 Nonparametric Regression Eric Zivot May 28, 2013 Nonparametric Regression Sofarwehaveonlyconsideredlinearregressionmodels = x 0 β + [ x ]=0 [ x = x] =x 0 β = [ x = x] [ x = x] x = β The assume
Introduction to Computer Vision
 Introduction to Computer Vision Michael J. Black Sept 2009 Lecture 8: Pyramids and image derivatives Goals Images as functions Derivatives of images Edges and gradients Laplacian pyramids Code for lecture
Introduction to Computer Vision Michael J. Black Sept 2009 Lecture 8: Pyramids and image derivatives Goals Images as functions Derivatives of images Edges and gradients Laplacian pyramids Code for lecture
Probabilistic Methods in Bioinformatics. Pabitra Mitra
 Probabilistic Methods in Bioinformatics Pabitra Mitra pabitra@cse.iitkgp.ernet.in Probability in Bioinformatics Classification Categorize a new object into a known class Supervised learning/predictive
Probabilistic Methods in Bioinformatics Pabitra Mitra pabitra@cse.iitkgp.ernet.in Probability in Bioinformatics Classification Categorize a new object into a known class Supervised learning/predictive
Probability Models for Bayesian Recognition
 Intelligent Systems: Reasoning and Recognition James L. Crowley ENSIAG / osig Second Semester 06/07 Lesson 9 0 arch 07 Probability odels for Bayesian Recognition Notation... Supervised Learning for Bayesian
Intelligent Systems: Reasoning and Recognition James L. Crowley ENSIAG / osig Second Semester 06/07 Lesson 9 0 arch 07 Probability odels for Bayesian Recognition Notation... Supervised Learning for Bayesian
Machine Learning Lecture 3
 Announcements Machine Learning Lecture 3 Eam dates We re in the process of fiing the first eam date Probability Density Estimation II 9.0.207 Eercises The first eercise sheet is available on L2P now First
Announcements Machine Learning Lecture 3 Eam dates We re in the process of fiing the first eam date Probability Density Estimation II 9.0.207 Eercises The first eercise sheet is available on L2P now First
Nonparametric Methods
 Nonparametric Methods Michael R. Roberts Department of Finance The Wharton School University of Pennsylvania July 28, 2009 Michael R. Roberts Nonparametric Methods 1/42 Overview Great for data analysis
Nonparametric Methods Michael R. Roberts Department of Finance The Wharton School University of Pennsylvania July 28, 2009 Michael R. Roberts Nonparametric Methods 1/42 Overview Great for data analysis
Feature extraction: Corners and blobs
 Feature extraction: Corners and blobs Review: Linear filtering and edge detection Name two different kinds of image noise Name a non-linear smoothing filter What advantages does median filtering have over
Feature extraction: Corners and blobs Review: Linear filtering and edge detection Name two different kinds of image noise Name a non-linear smoothing filter What advantages does median filtering have over
Probabilistic modeling. The slides are closely adapted from Subhransu Maji s slides
 Probabilistic modeling The slides are closely adapted from Subhransu Maji s slides Overview So far the models and algorithms you have learned about are relatively disconnected Probabilistic modeling framework
Probabilistic modeling The slides are closely adapted from Subhransu Maji s slides Overview So far the models and algorithms you have learned about are relatively disconnected Probabilistic modeling framework
SIFT: Scale Invariant Feature Transform
 1 SIFT: Scale Invariant Feature Transform With slides from Sebastian Thrun Stanford CS223B Computer Vision, Winter 2006 3 Pattern Recognition Want to find in here SIFT Invariances: Scaling Rotation Illumination
1 SIFT: Scale Invariant Feature Transform With slides from Sebastian Thrun Stanford CS223B Computer Vision, Winter 2006 3 Pattern Recognition Want to find in here SIFT Invariances: Scaling Rotation Illumination
Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems
 Robots for People --- A project for intelligent integrated systems") 1 Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems V. Estivill-Castro 2 Perception Concepts Vision Chapter 4 (textbook) Sections 4.3 to 4.5 What is the course
1 Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems V. Estivill-Castro 2 Perception Concepts Vision Chapter 4 (textbook) Sections 4.3 to 4.5 What is the course
Maximum Likelihood Estimation. only training data is available to design a classifier
 Introduction to Pattern Recognition [ Part 5 ] Mahdi Vasighi Introduction Bayesian Decision Theory shows that we could design an optimal classifier if we knew: P( i ) : priors p(x i ) : class-conditional
Introduction to Pattern Recognition [ Part 5 ] Mahdi Vasighi Introduction Bayesian Decision Theory shows that we could design an optimal classifier if we knew: P( i ) : priors p(x i ) : class-conditional
OBJECT DETECTION AND RECOGNITION IN DIGITAL IMAGES
 OBJECT DETECTION AND RECOGNITION IN DIGITAL IMAGES THEORY AND PRACTICE Bogustaw Cyganek AGH University of Science and Technology, Poland WILEY A John Wiley &. Sons, Ltd., Publication Contents Preface Acknowledgements
OBJECT DETECTION AND RECOGNITION IN DIGITAL IMAGES THEORY AND PRACTICE Bogustaw Cyganek AGH University of Science and Technology, Poland WILEY A John Wiley &. Sons, Ltd., Publication Contents Preface Acknowledgements
Shape of Gaussians as Feature Descriptors
 Shape of Gaussians as Feature Descriptors Liyu Gong, Tianjiang Wang and Fang Liu Intelligent and Distributed Computing Lab, School of Computer Science and Technology Huazhong University of Science and
Shape of Gaussians as Feature Descriptors Liyu Gong, Tianjiang Wang and Fang Liu Intelligent and Distributed Computing Lab, School of Computer Science and Technology Huazhong University of Science and
Modelling Non-linear and Non-stationary Time Series
 Modelling Non-linear and Non-stationary Time Series Chapter 2: Non-parametric methods Henrik Madsen Advanced Time Series Analysis September 206 Henrik Madsen (02427 Adv. TS Analysis) Lecture Notes September
Modelling Non-linear and Non-stationary Time Series Chapter 2: Non-parametric methods Henrik Madsen Advanced Time Series Analysis September 206 Henrik Madsen (02427 Adv. TS Analysis) Lecture Notes September
Pattern Recognition and Machine Learning. Bishop Chapter 2: Probability Distributions
 Pattern Recognition and Machine Learning Chapter 2: Probability Distributions Cécile Amblard Alex Kläser Jakob Verbeek October 11, 27 Probability Distributions: General Density Estimation: given a finite
Pattern Recognition and Machine Learning Chapter 2: Probability Distributions Cécile Amblard Alex Kläser Jakob Verbeek October 11, 27 Probability Distributions: General Density Estimation: given a finite
O Combining cross-validation and plug-in methods - for kernel density bandwidth selection O
 O Combining cross-validation and plug-in methods - for kernel density selection O Carlos Tenreiro CMUC and DMUC, University of Coimbra PhD Program UC UP February 18, 2011 1 Overview The nonparametric problem
O Combining cross-validation and plug-in methods - for kernel density selection O Carlos Tenreiro CMUC and DMUC, University of Coimbra PhD Program UC UP February 18, 2011 1 Overview The nonparametric problem
BACKPROPAGATION. Neural network training optimization problem. Deriving backpropagation
 BACKPROPAGATION Neural network training optimization problem min J(w) w The application of gradient descent to this problem is called backpropagation. Backpropagation is gradient descent applied to J(w)
BACKPROPAGATION Neural network training optimization problem min J(w) w The application of gradient descent to this problem is called backpropagation. Backpropagation is gradient descent applied to J(w)
Image processing and nonparametric regression
 Image processing and nonparametric regression Rencontres R BoRdeaux 2012 B. Thieurmel Collaborators : P.A. Cornillon, N. Hengartner, E. Matzner-Løber, B. Wolhberg 2 Juillet 2012 Rencontres R BoRdeaux 2012
Image processing and nonparametric regression Rencontres R BoRdeaux 2012 B. Thieurmel Collaborators : P.A. Cornillon, N. Hengartner, E. Matzner-Løber, B. Wolhberg 2 Juillet 2012 Rencontres R BoRdeaux 2012
Statistics: Learning models from data
 DS-GA 1002 Lecture notes 5 October 19, 2015 Statistics: Learning models from data Learning models from data that are assumed to be generated probabilistically from a certain unknown distribution is a crucial
DS-GA 1002 Lecture notes 5 October 19, 2015 Statistics: Learning models from data Learning models from data that are assumed to be generated probabilistically from a certain unknown distribution is a crucial
Reconnaissance d objetsd et vision artificielle
 Reconnaissance d objetsd et vision artificielle http://www.di.ens.fr/willow/teaching/recvis09 Lecture 6 Face recognition Face detection Neural nets Attention! Troisième exercice de programmation du le
Reconnaissance d objetsd et vision artificielle http://www.di.ens.fr/willow/teaching/recvis09 Lecture 6 Face recognition Face detection Neural nets Attention! Troisième exercice de programmation du le
Signal Modeling Techniques in Speech Recognition. Hassan A. Kingravi
 Signal Modeling Techniques in Speech Recognition Hassan A. Kingravi Outline Introduction Spectral Shaping Spectral Analysis Parameter Transforms Statistical Modeling Discussion Conclusions 1: Introduction
Signal Modeling Techniques in Speech Recognition Hassan A. Kingravi Outline Introduction Spectral Shaping Spectral Analysis Parameter Transforms Statistical Modeling Discussion Conclusions 1: Introduction
CS4670: Computer Vision Kavita Bala. Lecture 7: Harris Corner Detec=on
 CS4670: Computer Vision Kavita Bala Lecture 7: Harris Corner Detec=on Announcements HW 1 will be out soon Sign up for demo slots for PA 1 Remember that both partners have to be there We will ask you to
CS4670: Computer Vision Kavita Bala Lecture 7: Harris Corner Detec=on Announcements HW 1 will be out soon Sign up for demo slots for PA 1 Remember that both partners have to be there We will ask you to
Mixture Models and EM
 Mixture Models and EM Goal: Introduction to probabilistic mixture models and the expectationmaximization (EM) algorithm. Motivation: simultaneous fitting of multiple model instances unsupervised clustering
Mixture Models and EM Goal: Introduction to probabilistic mixture models and the expectationmaximization (EM) algorithm. Motivation: simultaneous fitting of multiple model instances unsupervised clustering
Probabilistic & Unsupervised Learning
 Probabilistic & Unsupervised Learning Gaussian Processes Maneesh Sahani maneesh@gatsby.ucl.ac.uk Gatsby Computational Neuroscience Unit, and MSc ML/CSML, Dept Computer Science University College London
Probabilistic & Unsupervised Learning Gaussian Processes Maneesh Sahani maneesh@gatsby.ucl.ac.uk Gatsby Computational Neuroscience Unit, and MSc ML/CSML, Dept Computer Science University College London
Learning Methods for Linear Detectors
 Intelligent Systems: Reasoning and Recognition James L. Crowley ENSIMAG 2 / MoSIG M1 Second Semester 2011/2012 Lesson 20 27 April 2012 Contents Learning Methods for Linear Detectors Learning Linear Detectors...2
Intelligent Systems: Reasoning and Recognition James L. Crowley ENSIMAG 2 / MoSIG M1 Second Semester 2011/2012 Lesson 20 27 April 2012 Contents Learning Methods for Linear Detectors Learning Linear Detectors...2
Nonparametric Inference via Bootstrapping the Debiased Estimator
 Nonparametric Inference via Bootstrapping the Debiased Estimator Yen-Chi Chen Department of Statistics, University of Washington ICSA-Canada Chapter Symposium 2017 1 / 21 Problem Setup Let X 1,, X n be
Nonparametric Inference via Bootstrapping the Debiased Estimator Yen-Chi Chen Department of Statistics, University of Washington ICSA-Canada Chapter Symposium 2017 1 / 21 Problem Setup Let X 1,, X n be
Medical Image Analysis
 Medical Image Analysis CS 593 / 791 Computer Science and Electrical Engineering Dept. West Virginia University 20th January 2006 Outline 1 Discretizing the heat equation 2 Outline 1 Discretizing the heat
Medical Image Analysis CS 593 / 791 Computer Science and Electrical Engineering Dept. West Virginia University 20th January 2006 Outline 1 Discretizing the heat equation 2 Outline 1 Discretizing the heat
ITK Filters. Thresholding Edge Detection Gradients Second Order Derivatives Neighborhood Filters Smoothing Filters Distance Map Image Transforms
 ITK Filters Thresholding Edge Detection Gradients Second Order Derivatives Neighborhood Filters Smoothing Filters Distance Map Image Transforms ITCS 6010:Biomedical Imaging and Visualization 1 ITK Filters:
ITK Filters Thresholding Edge Detection Gradients Second Order Derivatives Neighborhood Filters Smoothing Filters Distance Map Image Transforms ITCS 6010:Biomedical Imaging and Visualization 1 ITK Filters:
SURF Features. Jacky Baltes Dept. of Computer Science University of Manitoba WWW:
 SURF Features Jacky Baltes Dept. of Computer Science University of Manitoba Email: jacky@cs.umanitoba.ca WWW: http://www.cs.umanitoba.ca/~jacky Salient Spatial Features Trying to find interest points Points
SURF Features Jacky Baltes Dept. of Computer Science University of Manitoba Email: jacky@cs.umanitoba.ca WWW: http://www.cs.umanitoba.ca/~jacky Salient Spatial Features Trying to find interest points Points
Lecture 8: Interest Point Detection. Saad J Bedros
 #1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Review of Edge Detectors #2 Today s Lecture Interest Points Detection What do we mean with Interest Point Detection in an Image Goal:
#1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Review of Edge Detectors #2 Today s Lecture Interest Points Detection What do we mean with Interest Point Detection in an Image Goal:
Master of Intelligent Systems - French-Czech Double Diploma. Hough transform
 Hough transform I- Introduction The Hough transform is used to isolate features of a particular shape within an image. Because it requires that the desired features be specified in some parametric form,
Hough transform I- Introduction The Hough transform is used to isolate features of a particular shape within an image. Because it requires that the desired features be specified in some parametric form,
Do Markov-Switching Models Capture Nonlinearities in the Data? Tests using Nonparametric Methods
 Do Markov-Switching Models Capture Nonlinearities in the Data? Tests using Nonparametric Methods Robert V. Breunig Centre for Economic Policy Research, Research School of Social Sciences and School of
Do Markov-Switching Models Capture Nonlinearities in the Data? Tests using Nonparametric Methods Robert V. Breunig Centre for Economic Policy Research, Research School of Social Sciences and School of
Nonparametric Density Estimation
 Nonparametric Density Estimation Econ 690 Purdue University Justin L. Tobias (Purdue) Nonparametric Density Estimation 1 / 29 Density Estimation Suppose that you had some data, say on wages, and you wanted
Nonparametric Density Estimation Econ 690 Purdue University Justin L. Tobias (Purdue) Nonparametric Density Estimation 1 / 29 Density Estimation Suppose that you had some data, say on wages, and you wanted
Cheng Soon Ong & Christian Walder. Canberra February June 2018
 Cheng Soon Ong & Christian Walder Research Group and College of Engineering and Computer Science Canberra February June 2018 Outlines Overview Introduction Linear Algebra Probability Linear Regression
Cheng Soon Ong & Christian Walder Research Group and College of Engineering and Computer Science Canberra February June 2018 Outlines Overview Introduction Linear Algebra Probability Linear Regression
Information Theory in Computer Vision and Pattern Recognition
 Francisco Escolano Pablo Suau Boyan Bonev Information Theory in Computer Vision and Pattern Recognition Foreword by Alan Yuille ~ Springer Contents 1 Introduction...............................................
Francisco Escolano Pablo Suau Boyan Bonev Information Theory in Computer Vision and Pattern Recognition Foreword by Alan Yuille ~ Springer Contents 1 Introduction...............................................
Statistical and Learning Techniques in Computer Vision Lecture 1: Random Variables Jens Rittscher and Chuck Stewart
 Statistical and Learning Techniques in Computer Vision Lecture 1: Random Variables Jens Rittscher and Chuck Stewart 1 Motivation Imaging is a stochastic process: If we take all the different sources of
Statistical and Learning Techniques in Computer Vision Lecture 1: Random Variables Jens Rittscher and Chuck Stewart 1 Motivation Imaging is a stochastic process: If we take all the different sources of
Biomedical Image Analysis. Segmentation by Thresholding
 Biomedical Image Analysis Segmentation by Thresholding Contents: Thresholding principles Ridler & Calvard s method Ridler TW, Calvard S (1978). Picture thresholding using an iterative selection method,
Biomedical Image Analysis Segmentation by Thresholding Contents: Thresholding principles Ridler & Calvard s method Ridler TW, Calvard S (1978). Picture thresholding using an iterative selection method,
ECE Digital Image Processing and Introduction to Computer Vision
 ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 2017 Outline Recap, image degradation / restoration Template
ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 2017 Outline Recap, image degradation / restoration Template
Optimization II: Unconstrained Multivariable
 Optimization II: Unconstrained Multivariable CS 205A: Mathematical Methods for Robotics, Vision, and Graphics Justin Solomon CS 205A: Mathematical Methods Optimization II: Unconstrained Multivariable 1
Optimization II: Unconstrained Multivariable CS 205A: Mathematical Methods for Robotics, Vision, and Graphics Justin Solomon CS 205A: Mathematical Methods Optimization II: Unconstrained Multivariable 1
CPSC 540: Machine Learning
 CPSC 540: Machine Learning Kernel Density Estimation, Factor Analysis Mark Schmidt University of British Columbia Winter 2017 Admin Assignment 2: 2 late days to hand it in tonight. Assignment 3: Due Feburary
CPSC 540: Machine Learning Kernel Density Estimation, Factor Analysis Mark Schmidt University of British Columbia Winter 2017 Admin Assignment 2: 2 late days to hand it in tonight. Assignment 3: Due Feburary
Computer Vision Lecture 3
 Computer Vision Lecture 3 Linear Filters 03.11.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Demo Haribo Classification Code available on the class website...
Computer Vision Lecture 3 Linear Filters 03.11.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Demo Haribo Classification Code available on the class website...
Lecture 8: Interest Point Detection. Saad J Bedros
 #1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Last Lecture : Edge Detection Preprocessing of image is desired to eliminate or at least minimize noise effects There is always tradeoff
#1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Last Lecture : Edge Detection Preprocessing of image is desired to eliminate or at least minimize noise effects There is always tradeoff
Joint Optimization of Segmentation and Appearance Models
 Joint Optimization of Segmentation and Appearance Models David Mandle, Sameep Tandon April 29, 2013 David Mandle, Sameep Tandon (Stanford) April 29, 2013 1 / 19 Overview 1 Recap: Image Segmentation 2 Optimization
Joint Optimization of Segmentation and Appearance Models David Mandle, Sameep Tandon April 29, 2013 David Mandle, Sameep Tandon (Stanford) April 29, 2013 1 / 19 Overview 1 Recap: Image Segmentation 2 Optimization
PATTERN CLASSIFICATION
 PATTERN CLASSIFICATION Second Edition Richard O. Duda Peter E. Hart David G. Stork A Wiley-lnterscience Publication JOHN WILEY & SONS, INC. New York Chichester Weinheim Brisbane Singapore Toronto CONTENTS
PATTERN CLASSIFICATION Second Edition Richard O. Duda Peter E. Hart David G. Stork A Wiley-lnterscience Publication JOHN WILEY & SONS, INC. New York Chichester Weinheim Brisbane Singapore Toronto CONTENTS
Efficient Inference in Fully Connected CRFs with Gaussian Edge Potentials
 Efficient Inference in Fully Connected CRFs with Gaussian Edge Potentials Philipp Krähenbühl and Vladlen Koltun Stanford University Presenter: Yuan-Ting Hu 1 Conditional Random Field (CRF) E x I = φ u
Efficient Inference in Fully Connected CRFs with Gaussian Edge Potentials Philipp Krähenbühl and Vladlen Koltun Stanford University Presenter: Yuan-Ting Hu 1 Conditional Random Field (CRF) E x I = φ u
Feature Extraction Line & Curve
 Feature Extraction Line & Curve 2/25/11 ECEn 631 Standard Procedure Locate edges within the image Link broken edges Thin thick edges For every edge pixel, find possible parameters Locate all clusters of
Feature Extraction Line & Curve 2/25/11 ECEn 631 Standard Procedure Locate edges within the image Link broken edges Thin thick edges For every edge pixel, find possible parameters Locate all clusters of
LoG Blob Finding and Scale. Scale Selection. Blobs (and scale selection) Achieving scale covariance. Blob detection in 2D. Blob detection in 2D
 Achieving scale covariance. Blob detection in 2D. Blob detection in 2D") Achieving scale covariance Blobs (and scale selection) Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region
Achieving scale covariance Blobs (and scale selection) Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region
Kernel-based density. Nuno Vasconcelos ECE Department, UCSD
 Kernel-based density estimation Nuno Vasconcelos ECE Department, UCSD Announcement last week of classes we will have Cheetah Day (exact day TBA) what: 4 teams of 6 people each team will write a report
Kernel-based density estimation Nuno Vasconcelos ECE Department, UCSD Announcement last week of classes we will have Cheetah Day (exact day TBA) what: 4 teams of 6 people each team will write a report
EEL 851: Biometrics. An Overview of Statistical Pattern Recognition EEL 851 1
 EEL 851: Biometrics An Overview of Statistical Pattern Recognition EEL 851 1 Outline Introduction Pattern Feature Noise Example Problem Analysis Segmentation Feature Extraction Classification Design Cycle
EEL 851: Biometrics An Overview of Statistical Pattern Recognition EEL 851 1 Outline Introduction Pattern Feature Noise Example Problem Analysis Segmentation Feature Extraction Classification Design Cycle
Confidence intervals for kernel density estimation
 Stata User Group - 9th UK meeting - 19/20 May 2003 Confidence intervals for kernel density estimation Carlo Fiorio c.fiorio@lse.ac.uk London School of Economics and STICERD Stata User Group - 9th UK meeting
Stata User Group - 9th UK meeting - 19/20 May 2003 Confidence intervals for kernel density estimation Carlo Fiorio c.fiorio@lse.ac.uk London School of Economics and STICERD Stata User Group - 9th UK meeting
Forecasting Wind Ramps
 Forecasting Wind Ramps Erin Summers and Anand Subramanian Jan 5, 20 Introduction The recent increase in the number of wind power producers has necessitated changes in the methods power system operators
Forecasting Wind Ramps Erin Summers and Anand Subramanian Jan 5, 20 Introduction The recent increase in the number of wind power producers has necessitated changes in the methods power system operators
Maximum Smoothed Likelihood for Multivariate Nonparametric Mixtures
 Maximum Smoothed Likelihood for Multivariate Nonparametric Mixtures David Hunter Pennsylvania State University, USA Joint work with: Tom Hettmansperger, Hoben Thomas, Didier Chauveau, Pierre Vandekerkhove,
Maximum Smoothed Likelihood for Multivariate Nonparametric Mixtures David Hunter Pennsylvania State University, USA Joint work with: Tom Hettmansperger, Hoben Thomas, Didier Chauveau, Pierre Vandekerkhove,
3.4 Linear Least-Squares Filter
 X(n) = [x(1), x(2),..., x(n)] T 1 3.4 Linear Least-Squares Filter Two characteristics of linear least-squares filter: 1. The filter is built around a single linear neuron. 2. The cost function is the sum
X(n) = [x(1), x(2),..., x(n)] T 1 3.4 Linear Least-Squares Filter Two characteristics of linear least-squares filter: 1. The filter is built around a single linear neuron. 2. The cost function is the sum
p(d θ ) l(θ ) 1.2 x x x
 l(θ ) 1.2 x x x") p(d θ ).2 x 0-7 0.8 x 0-7 0.4 x 0-7 l(θ ) -20-40 -60-80 -00 2 3 4 5 6 7 θ ˆ 2 3 4 5 6 7 θ ˆ 2 3 4 5 6 7 θ θ x FIGURE 3.. The top graph shows several training points in one dimension, known or assumed to
p(d θ ).2 x 0-7 0.8 x 0-7 0.4 x 0-7 l(θ ) -20-40 -60-80 -00 2 3 4 5 6 7 θ ˆ 2 3 4 5 6 7 θ ˆ 2 3 4 5 6 7 θ θ x FIGURE 3.. The top graph shows several training points in one dimension, known or assumed to
Research Article Thalamus Segmentation from Diffusion Tensor Magnetic Resonance Imaging
 Biomedical Imaging Volume 2007, Article ID 90216, 5 pages doi:10.1155/2007/90216 Research Article Thalamus Segmentation from Diffusion Tensor Magnetic Resonance Imaging Ye Duan, Xiaoling Li, and Yongjian
Biomedical Imaging Volume 2007, Article ID 90216, 5 pages doi:10.1155/2007/90216 Research Article Thalamus Segmentation from Diffusion Tensor Magnetic Resonance Imaging Ye Duan, Xiaoling Li, and Yongjian
Nonparametric Bayesian Methods (Gaussian Processes)
") [70240413 Statistical Machine Learning, Spring, 2015] Nonparametric Bayesian Methods (Gaussian Processes) Jun Zhu dcszj@mail.tsinghua.edu.cn http://bigml.cs.tsinghua.edu.cn/~jun State Key Lab of Intelligent
[70240413 Statistical Machine Learning, Spring, 2015] Nonparametric Bayesian Methods (Gaussian Processes) Jun Zhu dcszj@mail.tsinghua.edu.cn http://bigml.cs.tsinghua.edu.cn/~jun State Key Lab of Intelligent
Machine Learning. Nonparametric Methods. Space of ML Problems. Todo. Histograms. Instance-Based Learning (aka non-parametric methods)
") Machine Learning InstanceBased Learning (aka nonparametric methods) Supervised Learning Unsupervised Learning Reinforcement Learning Parametric Non parametric CSE 446 Machine Learning Daniel Weld March
Machine Learning InstanceBased Learning (aka nonparametric methods) Supervised Learning Unsupervised Learning Reinforcement Learning Parametric Non parametric CSE 446 Machine Learning Daniel Weld March
Automatic detection and of dipoles in large area SQUID magnetometry
 Automatic detection and of dipoles in large area SQUID magnetometry Lisa Qian December 4, Introduction. Scanning SQUID magnetometry Scanning SQUID magnetometry is a powerful tool for metrology of individual
Automatic detection and of dipoles in large area SQUID magnetometry Lisa Qian December 4, Introduction. Scanning SQUID magnetometry Scanning SQUID magnetometry is a powerful tool for metrology of individual
Contrastive Divergence
 Contrastive Divergence Training Products of Experts by Minimizing CD Hinton, 2002 Helmut Puhr Institute for Theoretical Computer Science TU Graz June 9, 2010 Contents 1 Theory 2 Argument 3 Contrastive
Contrastive Divergence Training Products of Experts by Minimizing CD Hinton, 2002 Helmut Puhr Institute for Theoretical Computer Science TU Graz June 9, 2010 Contents 1 Theory 2 Argument 3 Contrastive
Achieving scale covariance
 Achieving scale covariance Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region size that is covariant
Achieving scale covariance Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region size that is covariant
Lecture 7: Edge Detection
 #1 Lecture 7: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Definition of an Edge First Order Derivative Approximation as Edge Detector #2 This Lecture Examples of Edge Detection
#1 Lecture 7: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Definition of an Edge First Order Derivative Approximation as Edge Detector #2 This Lecture Examples of Edge Detection
Medical Image Analysis
 Medical Image Analysis CS 593 / 791 Computer Science and Electrical Engineering Dept. West Virginia University 23rd January 2006 Outline 1 Recap 2 Edge Enhancement 3 Experimental Results 4 The rest of
Medical Image Analysis CS 593 / 791 Computer Science and Electrical Engineering Dept. West Virginia University 23rd January 2006 Outline 1 Recap 2 Edge Enhancement 3 Experimental Results 4 The rest of
Visuelle Perzeption für Mensch- Maschine Schnittstellen
 Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2008 Dr. Rainer Stiefelhagen Dr. Edgar Seemann Interactive Systems Laboratories Universität Karlsruhe (TH) http://isl.ira.uka.de/msmmi/teaching/visionhci
Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2008 Dr. Rainer Stiefelhagen Dr. Edgar Seemann Interactive Systems Laboratories Universität Karlsruhe (TH) http://isl.ira.uka.de/msmmi/teaching/visionhci
Over-enhancement Reduction in Local Histogram Equalization using its Degrees of Freedom. Alireza Avanaki
 Over-enhancement Reduction in Local Histogram Equalization using its Degrees of Freedom Alireza Avanaki ABSTRACT A well-known issue of local (adaptive) histogram equalization (LHE) is over-enhancement
Over-enhancement Reduction in Local Histogram Equalization using its Degrees of Freedom Alireza Avanaki ABSTRACT A well-known issue of local (adaptive) histogram equalization (LHE) is over-enhancement
Templates, Image Pyramids, and Filter Banks
 Templates, Image Pyramids, and Filter Banks 09/9/ Computer Vision James Hays, Brown Slides: Hoiem and others Review. Match the spatial domain image to the Fourier magnitude image 2 3 4 5 B A C D E Slide:
Templates, Image Pyramids, and Filter Banks 09/9/ Computer Vision James Hays, Brown Slides: Hoiem and others Review. Match the spatial domain image to the Fourier magnitude image 2 3 4 5 B A C D E Slide:
Single Index Quantile Regression for Heteroscedastic Data
 Single Index Quantile Regression for Heteroscedastic Data E. Christou M. G. Akritas Department of Statistics The Pennsylvania State University JSM, 2015 E. Christou, M. G. Akritas (PSU) SIQR JSM, 2015
Single Index Quantile Regression for Heteroscedastic Data E. Christou M. G. Akritas Department of Statistics The Pennsylvania State University JSM, 2015 E. Christou, M. G. Akritas (PSU) SIQR JSM, 2015
Linear Discrimination Functions
 Laurea Magistrale in Informatica Nicola Fanizzi Dipartimento di Informatica Università degli Studi di Bari November 4, 2009 Outline Linear models Gradient descent Perceptron Minimum square error approach
Laurea Magistrale in Informatica Nicola Fanizzi Dipartimento di Informatica Università degli Studi di Bari November 4, 2009 Outline Linear models Gradient descent Perceptron Minimum square error approach
Feature detectors and descriptors. Fei-Fei Li
 Feature detectors and descriptors Fei-Fei Li Feature Detection e.g. DoG detected points (~300) coordinates, neighbourhoods Feature Description e.g. SIFT local descriptors (invariant) vectors database of
Feature detectors and descriptors Fei-Fei Li Feature Detection e.g. DoG detected points (~300) coordinates, neighbourhoods Feature Description e.g. SIFT local descriptors (invariant) vectors database of
Roadmap. Introduction to image analysis (computer vision) Theory of edge detection. Applications
 Theory of edge detection. Applications") Edge Detection Roadmap Introduction to image analysis (computer vision) Its connection with psychology and neuroscience Why is image analysis difficult? Theory of edge detection Gradient operator Advanced
Edge Detection Roadmap Introduction to image analysis (computer vision) Its connection with psychology and neuroscience Why is image analysis difficult? Theory of edge detection Gradient operator Advanced
Diffusion/Inference geometries of data features, situational awareness and visualization. Ronald R Coifman Mathematics Yale University
 Diffusion/Inference geometries of data features, situational awareness and visualization Ronald R Coifman Mathematics Yale University Digital data is generally converted to point clouds in high dimensional
Diffusion/Inference geometries of data features, situational awareness and visualization Ronald R Coifman Mathematics Yale University Digital data is generally converted to point clouds in high dimensional
Feature detectors and descriptors. Fei-Fei Li
 Feature detectors and descriptors Fei-Fei Li Feature Detection e.g. DoG detected points (~300) coordinates, neighbourhoods Feature Description e.g. SIFT local descriptors (invariant) vectors database of
Feature detectors and descriptors Fei-Fei Li Feature Detection e.g. DoG detected points (~300) coordinates, neighbourhoods Feature Description e.g. SIFT local descriptors (invariant) vectors database of
Low-level Image Processing
 Low-level Image Processing In-Place Covariance Operators for Computer Vision Terry Caelli and Mark Ollila School of Computing, Curtin University of Technology, Perth, Western Australia, Box U 1987, Emaihtmc@cs.mu.oz.au
Low-level Image Processing In-Place Covariance Operators for Computer Vision Terry Caelli and Mark Ollila School of Computing, Curtin University of Technology, Perth, Western Australia, Box U 1987, Emaihtmc@cs.mu.oz.au