Properties of detectors Edge detectors Harris DoG Properties of descriptors SIFT HOG Shape context
|
|
|
- Emma Chambers
- 6 years ago
- Views:
Transcription


1 Lecture 10 Detectors and descriptors Properties of detectors Edge detectors Harris DoG Properties of descriptors SIFT HOG Shape context Silvio Savarese Lecture Feb-15
2 From the 3D to 2D & vice versa P = [x,y,z] p = [x,y] 3D world Image Let s now focus on 2D

3 How to represent images?
4 The big picture Feature Detection e.g. DoG Feature Description e.g. SIFT Estimation Matching Indexing Detection

5 Estimation Courtesy of TKK Automation Technology Laboratory

6 Estimation H
7 Estimation

8 Matching Image 1 Image 2

9 Object modeling and detection A
10 Lecture 10 Detectors and descriptors Properties of detectors Edge detectors Harris DoG Properties of descriptors SIFT HOG Shape context Silvio Savarese Lecture Feb-15
11 Edge detection
 Illumination discontinuity (e.")
12 Depth discontinuity Surface orientation discontinuity What causes an edge? Identifies sudden changes in an image Reflectance discontinuity (i.e., change in surface material properties) Illumination discontinuity (e.g., highlights; shadows)
13 Good detection accuracy: Edge Detection Criteria for optimal edge detection (Canny 86): minimize the probability of false positives (detecting spurious edges caused by noise), false negatives (missing real edges) Good localization: edges must be detected as close as possible to the true edges. Single response constraint: minimize the number of local maxima around the true edge (i.e. detector must return single point for each true edge point)
14 Examples: Edge Detection True edge Poor robustness to noise Poor localization Too many responses
15 Designing an edge detector Two ingredients: Use derivatives (in x and y direction) to define a location with high gradient. Need smoothing to reduce noise prior to taking derivative
16 Designing an edge detector f g f * g d dx ( f g) [Eq. 1] [Eq. 2] = dg dx f = derivative of Gaussian filter Source: S. Seitz
17 Edge detector in 2D Smoothing I' 1 2π σ 2 e 2σ 2 [Eq. 3] [Eq. 4] = g(x, y) I g(x, y) = x 2 +y 2 Derivative ( g I) = ( g) = S = I ' g x $ & g x I # = % I g " = $! & y # % g y I " g & g # $! & $ g x = g x! = $ $! % g y $ % y!" =! " S x S y # $ = gradient vector [Eq. 5] #! " [Eq. 6]



18 Canny Edge Detection (Canny 86): See CS131A for details original Canny with Canny with The choice of σ depends on desired behavior large σ detects large scale edges small σ detects fine features
19 Other edge detectors: - Sobel - Canny-Deriche - Differential
20 Corner/blob detectors
21 Corner/blob detectors Repeatability The same feature can be found in several images despite geometric and photometric transformations Saliency Each feature is found at an interesting region of the image Locality A feature occupies a relatively small area of the image;
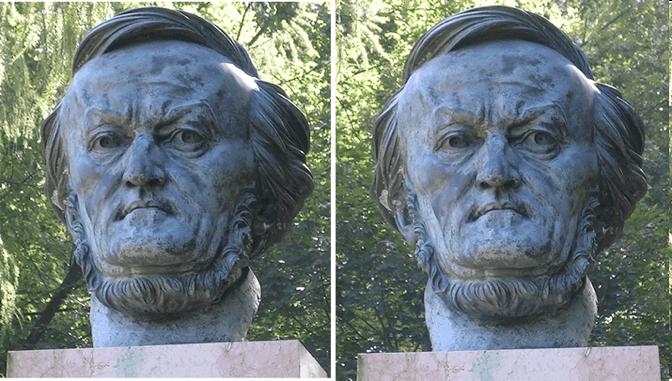
22 Repeatability Illumination invariance Scale invariance Pose invariance Rotation Affine
23 Saliency Locality
24 Corners detectors
25 Harris corner detector C.Harris and M.Stephens. "A Combined Corner and Edge Detector. Proceedings of the 4th Alvey Vision Conference: pages See CS131A for details
26 Harris Detector: Basic Idea Explore intensity changes within a window as the window changes location flat region: no change in all directions edge : no change along the edge direction corner : significant change in all directions

27 Results
28 Blob detectors
29 Edge detection f g f * g d dx ( f g) Source: S. Seitz
30 Edge detection f g f * g [Eq. 7] d dx 2 2 ( f g) [Eq. 8] d dx 2 f 2 g = second derivative of Gaussian filter = Laplacian of the gaussian
31 Edge detection as zero crossing f Edge d dx 2 2 g Laplacian d dx 2 f 2 [Eq. 8] g Edge = zero crossing of second derivative
32 Edge detection as zero crossing * = edge edge
33 From edges to blobs Can we use the laplacian to find a blob (RECT function)? * * * = = = maximum Magnitude of the Laplacian response achieves a maximum at the center of the blob, provided the scale of the Laplacian is matched to the scale of the blob
34 From edges to blobs Can we use the laplacian to find a blob (RECT function)? * * * = = = What if the blob is slightly thicker or slimmer? maximum
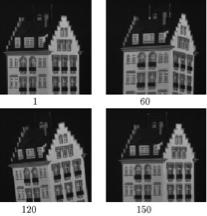
35 Scale selection Convolve signal with Laplacians at several sizes and looking for the maximum response increasing σ
36 Scale normalization To keep the energy of the response the same, must multiply Gaussian derivative by σ Laplacian is the second Gaussian derivative, so it must be multiplied by σ 2 Normalized Laplacian g(x) = 1 2π σ e x 2 2σ 2 σ 2 d 2 dx 2 g
37 Characteristic scale We define the characteristic scale as the scale that produces peak of Laplacian response Original signal Scale-normalized Laplacian response σ = 1 σ = 2 σ = 4 σ = 8 σ = 16 Maximum T. Lindeberg (1998). "Feature detection with automatic scale selection." International Journal of Computer Vision 30 (2): pp
38 Characteristic scale Here is what happens if we don t normalize the Laplacian: Original signal σ = 1 σ = 2 σ = 4 σ = 8 σ = 16 This should give the max response
39 Blob detection in 2D Laplacian of Gaussian: Circularly symmetric operator for blob detection in 2D Scale-normalized: [Eq. 9] & g g 2 g = σ 2 $ + norm % x 2 y #! "
40 Scale selection For a binary circle of radius r, the Laplacian achieves a maximum at σ = r / 2 r Laplacian response image r / 2 scale (σ)

41 Scale-space blob detector 1. Convolve image with scale-normalized Laplacian at several scales 2. Find maxima of squared Laplacian response in scale-space The maxima indicate that a blob has been detected and what s its intrinsic scale
42 Scale-space blob detector: Example

43 Scale-space blob detector: Example
44 Scale-space blob detector: Example
45 Difference of Gaussians (DoG) David G. Lowe. "Distinctive image features from scale-invariant keypoints. IJCV 60 (2), 04 Approximating the Laplacian with a difference of Gaussians: ( (,, ) (,, )) 2 L = Gxx x y + Gyy x y σ σ σ (Laplacian) DoG = G(x, y,2σ ) G(x, y,σ ) Difference of gaussian with scales 2 σ and σ [Eq. 10] [Eq. 11] In general: DoG = G(x, y,kσ ) G(x, y,σ ) (k 1)σ 2 L [Eq. 12]
:63-86, 2004.")
46 Affine invariant detectors K. Mikolajczyk and C. Schmid, Scale and Affine invariant interest point detectors, IJCV 60(1):63-86, Similarly to characteristic scale, we can define the characteristic shape of a blob
47 Detector Illumination Rotation Scale View point Lowe 99 (DoG) Properties of detectors Yes Yes Yes No Scale-normalized: & g g = $ normg σ % x y #! "
48 Detector Illumination Rotation Scale View point Lowe 99 (DoG) Properties of detectors Yes Yes Yes No Harris corner Yes Yes No No Mikolajczyk & Schmid 01, 02 Yes Yes Yes Yes Tuytelaars, 00 Yes Yes No (Yes 04 ) Yes Kadir & Brady, 01 Yes Yes Yes no Matas, 02 Yes Yes Yes no
49 Lecture 10 Detectors and descriptors Properties of detectors Edge detectors Harris DoG Properties of descriptors SIFT HOG Shape context Silvio Savarese Lecture Feb-15

50 The big picture Feature Detection e.g. DoG Feature Description e.g. SIFT Estimation Matching Indexing Detection
51 Invariant w.r.t: Properties Depending on the application a descriptor must incorporate information that is: Illumination Pose Scale Intraclass variability A a Highly distinctive (allows a single feature to find its correct match with good probability in a large database of features)
52 The simplest descriptor M N 1 x NM vector of pixel intensities w= [ ]
53 Normalized vector of intensities M 1 x NM vector of pixel intensities w= [ ] w n = (w (w w) w) Makes the descriptor invariant with respect to affine transformation of the illumination condition [Eq. 13] N
54 Illumination normalization Affine intensity change: w w + b a w + b [Eq. 14] w n = (w (w w) w) w Make each patch zero mean: remove b Make unit variance: remove a Index of w
55 Why can t we just use this? Sensitive to small variation of: location Pose Scale intra-class variability Poorly distinctive
(w! w)(w! w!) w!")
56 Sensitive to pose variations Normalized Correlation: NCC w n w! n = (w (w w)(w! w)(w! w!) w!) u
57 Properties of descriptors Descriptor Illumination Pose Intra-class variab. PATCH Good Poor Poor



58 Bank of filters * = image filter bank filter responses More robust but still quite sensitive to pose variations descriptor A. Oliva and A. Torralba. Modeling the shape of the scene: a holistic representation of the spatial envelope. IJCV, 2001.
59 Properties of descriptors Descriptor Illumination Pose Intra-class variab. PATCH Good Poor Poor FILTERS Good Medium Medium
60 SIFT descriptor David G. Lowe. "Distinctive image features from scale-invariant keypoints. IJCV 60 (2), 04 Alternative representation for image regions Location and characteristic scale s given by DoG detector s Image window
61 SIFT descriptor Alternative representation for image regions Location and characteristic scale s given by DoG detector s Compute gradient at each pixel N x N spatial bins Compute an histogram h i of M orientations for each bin i θ 1 θ 2 θ M-1 θ M
62 SIFT descriptor Alternative representation for image regions Location and characteristic scale s given by DoG detector s Compute gradient at each pixel N x N spatial bins Compute an histogram h i of M orientations for each bin i Concatenate h i for i=1 to N 2 to form a 1xMN 2 vector H



63 SIFT descriptor Alternative representation for image regions Location and characteristic scale s given by DoG detector s Compute gradient at each pixel N x N spatial bins Compute an histogram h i of M orientations for each bin i Concatenate h i for i=1 to N 2 to form a 1xMN 2 vector H Normalize to unit norm Gaussian center-weighting Typically M = 8; N= 4 H = 1 x 128 descriptor
64 SIFT descriptor Robust w.r.t. small variation in: Illumination (thanks to gradient & normalization) Pose (small affine variation thanks to orientation histogram ) Scale (scale is fixed by DOG) Intra-class variability (small variations thanks to histograms)
65 Rotational invariance Find dominant orientation by building a orientation histogram Rotate all orientations by the dominant orientation 0 2 π This makes the SIFT descriptor rotational invariant
66 Properties of descriptors Descriptor Illumination Pose Intra-class variab. PATCH Good Poor Poor FILTERS Good Medium Medium SIFT Good Good Medium
67 HoG = Histogram of Oriented Gradients Navneet Dalal and Bill Triggs, Histograms of Oriented Gradients for Human Detection, CVPR05 Like SIFT, but Sampled on a dense, regular grid around the object Gradients are contrast normalized in overlapping blocks
68 Shape context descriptor Belongie et al Histogram (occurrences within each bin) A // Bin # 13 th

69 Shape context descriptor Courtesy of S. Belongie and J. Malik descriptor 1 descriptor 2 descriptor 3
70 Other detectors/descriptors HOG: Histogram of oriented gradients Dalal & Triggs, 2005 SURF: Speeded Up Robust Features Herbert Bay, Andreas Ess, Tinne Tuytelaars, Luc Van Gool, "SURF: Speeded Up Robust Features", Computer Vision and Image Understanding (CVIU), Vol. 110, No. 3, pp , 2008 FAST (corner detector) Rosten. Machine Learning for High- speed Corner Detection, ORB: an efficient alternative to SIFT or SURF Ethan Rublee, Vincent Rabaud, Kurt Konolige, Gary R. Bradski: ORB: An efficient alternative to SIFT or SURF. ICCV 2011 Fast Retina Key- point (FREAK) A. Alahi, R. Ortiz, and P. Vandergheynst. FREAK: Fast Retina Keypoint. In IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2012 Open Source Award Winner.
71 Next lecture: Image Classification by Deep Networks by Ronan Collobert (Facebook)
Detectors part II Descriptors
 EECS 442 Computer vision Detectors part II Descriptors Blob detectors Invariance Descriptors Some slides of this lectures are courtesy of prof F. Li, prof S. Lazebnik, and various other lecturers Goal:
EECS 442 Computer vision Detectors part II Descriptors Blob detectors Invariance Descriptors Some slides of this lectures are courtesy of prof F. Li, prof S. Lazebnik, and various other lecturers Goal:
Feature extraction: Corners and blobs
 Feature extraction: Corners and blobs Review: Linear filtering and edge detection Name two different kinds of image noise Name a non-linear smoothing filter What advantages does median filtering have over
Feature extraction: Corners and blobs Review: Linear filtering and edge detection Name two different kinds of image noise Name a non-linear smoothing filter What advantages does median filtering have over
Corners, Blobs & Descriptors. With slides from S. Lazebnik & S. Seitz, D. Lowe, A. Efros
 Corners, Blobs & Descriptors With slides from S. Lazebnik & S. Seitz, D. Lowe, A. Efros Motivation: Build a Panorama M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 How do we build panorama?
Corners, Blobs & Descriptors With slides from S. Lazebnik & S. Seitz, D. Lowe, A. Efros Motivation: Build a Panorama M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 How do we build panorama?
Edges and Scale. Image Features. Detecting edges. Origin of Edges. Solution: smooth first. Effects of noise
 Edges and Scale Image Features From Sandlot Science Slides revised from S. Seitz, R. Szeliski, S. Lazebnik, etc. Origin of Edges surface normal discontinuity depth discontinuity surface color discontinuity
Edges and Scale Image Features From Sandlot Science Slides revised from S. Seitz, R. Szeliski, S. Lazebnik, etc. Origin of Edges surface normal discontinuity depth discontinuity surface color discontinuity
CSE 473/573 Computer Vision and Image Processing (CVIP)
") CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Lecture 11 Local Features 1 Schedule Last class We started local features Today More on local features Readings for
CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Lecture 11 Local Features 1 Schedule Last class We started local features Today More on local features Readings for
Extract useful building blocks: blobs. the same image like for the corners
 Extract useful building blocks: blobs the same image like for the corners Here were the corners... Blob detection in 2D Laplacian of Gaussian: Circularly symmetric operator for blob detection in 2D 2 g=
Extract useful building blocks: blobs the same image like for the corners Here were the corners... Blob detection in 2D Laplacian of Gaussian: Circularly symmetric operator for blob detection in 2D 2 g=
SIFT keypoint detection. D. Lowe, Distinctive image features from scale-invariant keypoints, IJCV 60 (2), pp , 2004.
, pp , 2004.") SIFT keypoint detection D. Lowe, Distinctive image features from scale-invariant keypoints, IJCV 60 (), pp. 91-110, 004. Keypoint detection with scale selection We want to extract keypoints with characteristic
SIFT keypoint detection D. Lowe, Distinctive image features from scale-invariant keypoints, IJCV 60 (), pp. 91-110, 004. Keypoint detection with scale selection We want to extract keypoints with characteristic
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely Lecture 5: Feature descriptors and matching Szeliski: 4.1 Reading Announcements Project 1 Artifacts due tomorrow, Friday 2/17, at 11:59pm Project 2 will be released
CS5670: Computer Vision Noah Snavely Lecture 5: Feature descriptors and matching Szeliski: 4.1 Reading Announcements Project 1 Artifacts due tomorrow, Friday 2/17, at 11:59pm Project 2 will be released
Blobs & Scale Invariance
 Blobs & Scale Invariance Prof. Didier Stricker Doz. Gabriele Bleser Computer Vision: Object and People Tracking With slides from Bebis, S. Lazebnik & S. Seitz, D. Lowe, A. Efros 1 Apertizer: some videos
Blobs & Scale Invariance Prof. Didier Stricker Doz. Gabriele Bleser Computer Vision: Object and People Tracking With slides from Bebis, S. Lazebnik & S. Seitz, D. Lowe, A. Efros 1 Apertizer: some videos
Overview. Harris interest points. Comparing interest points (SSD, ZNCC, SIFT) Scale & affine invariant interest points
 Scale & affine invariant interest points") Overview Harris interest points Comparing interest points (SSD, ZNCC, SIFT) Scale & affine invariant interest points Evaluation and comparison of different detectors Region descriptors and their performance
Overview Harris interest points Comparing interest points (SSD, ZNCC, SIFT) Scale & affine invariant interest points Evaluation and comparison of different detectors Region descriptors and their performance
Blob Detection CSC 767
 Blob Detection CSC 767 Blob detection Slides: S. Lazebnik Feature detection with scale selection We want to extract features with characteristic scale that is covariant with the image transformation Blob
Blob Detection CSC 767 Blob detection Slides: S. Lazebnik Feature detection with scale selection We want to extract features with characteristic scale that is covariant with the image transformation Blob
Overview. Introduction to local features. Harris interest points + SSD, ZNCC, SIFT. Evaluation and comparison of different detectors
 Overview Introduction to local features Harris interest points + SSD, ZNCC, SIFT Scale & affine invariant interest point detectors Evaluation and comparison of different detectors Region descriptors and
Overview Introduction to local features Harris interest points + SSD, ZNCC, SIFT Scale & affine invariant interest point detectors Evaluation and comparison of different detectors Region descriptors and
CS 3710: Visual Recognition Describing Images with Features. Adriana Kovashka Department of Computer Science January 8, 2015
 CS 3710: Visual Recognition Describing Images with Features Adriana Kovashka Department of Computer Science January 8, 2015 Plan for Today Presentation assignments + schedule changes Image filtering Feature
CS 3710: Visual Recognition Describing Images with Features Adriana Kovashka Department of Computer Science January 8, 2015 Plan for Today Presentation assignments + schedule changes Image filtering Feature
LoG Blob Finding and Scale. Scale Selection. Blobs (and scale selection) Achieving scale covariance. Blob detection in 2D. Blob detection in 2D
 Achieving scale covariance. Blob detection in 2D. Blob detection in 2D") Achieving scale covariance Blobs (and scale selection) Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region
Achieving scale covariance Blobs (and scale selection) Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region
Recap: edge detection. Source: D. Lowe, L. Fei-Fei
 Recap: edge detection Source: D. Lowe, L. Fei-Fei Canny edge detector 1. Filter image with x, y derivatives of Gaussian 2. Find magnitude and orientation of gradient 3. Non-maximum suppression: Thin multi-pixel
Recap: edge detection Source: D. Lowe, L. Fei-Fei Canny edge detector 1. Filter image with x, y derivatives of Gaussian 2. Find magnitude and orientation of gradient 3. Non-maximum suppression: Thin multi-pixel
Advances in Computer Vision. Prof. Bill Freeman. Image and shape descriptors. Readings: Mikolajczyk and Schmid; Belongie et al.
 6.869 Advances in Computer Vision Prof. Bill Freeman March 3, 2005 Image and shape descriptors Affine invariant features Comparison of feature descriptors Shape context Readings: Mikolajczyk and Schmid;
6.869 Advances in Computer Vision Prof. Bill Freeman March 3, 2005 Image and shape descriptors Affine invariant features Comparison of feature descriptors Shape context Readings: Mikolajczyk and Schmid;
Achieving scale covariance
 Achieving scale covariance Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region size that is covariant
Achieving scale covariance Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region size that is covariant
Feature detectors and descriptors. Fei-Fei Li
 Feature detectors and descriptors Fei-Fei Li Feature Detection e.g. DoG detected points (~300) coordinates, neighbourhoods Feature Description e.g. SIFT local descriptors (invariant) vectors database of
Feature detectors and descriptors Fei-Fei Li Feature Detection e.g. DoG detected points (~300) coordinates, neighbourhoods Feature Description e.g. SIFT local descriptors (invariant) vectors database of
Feature detectors and descriptors. Fei-Fei Li
 Feature detectors and descriptors Fei-Fei Li Feature Detection e.g. DoG detected points (~300) coordinates, neighbourhoods Feature Description e.g. SIFT local descriptors (invariant) vectors database of
Feature detectors and descriptors Fei-Fei Li Feature Detection e.g. DoG detected points (~300) coordinates, neighbourhoods Feature Description e.g. SIFT local descriptors (invariant) vectors database of
Scale & Affine Invariant Interest Point Detectors
 Scale & Affine Invariant Interest Point Detectors Krystian Mikolajczyk and Cordelia Schmid Presented by Hunter Brown & Gaurav Pandey, February 19, 2009 Roadmap: Motivation Scale Invariant Detector Affine
Scale & Affine Invariant Interest Point Detectors Krystian Mikolajczyk and Cordelia Schmid Presented by Hunter Brown & Gaurav Pandey, February 19, 2009 Roadmap: Motivation Scale Invariant Detector Affine
Lecture 8: Interest Point Detection. Saad J Bedros
 #1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Review of Edge Detectors #2 Today s Lecture Interest Points Detection What do we mean with Interest Point Detection in an Image Goal:
#1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Review of Edge Detectors #2 Today s Lecture Interest Points Detection What do we mean with Interest Point Detection in an Image Goal:
Image Analysis. Feature extraction: corners and blobs
 Image Analysis Feature extraction: corners and blobs Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Svetlana Lazebnik, University of North Carolina at Chapel Hill (http://www.cs.unc.edu/~lazebnik/spring10/).
Image Analysis Feature extraction: corners and blobs Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Svetlana Lazebnik, University of North Carolina at Chapel Hill (http://www.cs.unc.edu/~lazebnik/spring10/).
SURF Features. Jacky Baltes Dept. of Computer Science University of Manitoba WWW:
 SURF Features Jacky Baltes Dept. of Computer Science University of Manitoba Email: jacky@cs.umanitoba.ca WWW: http://www.cs.umanitoba.ca/~jacky Salient Spatial Features Trying to find interest points Points
SURF Features Jacky Baltes Dept. of Computer Science University of Manitoba Email: jacky@cs.umanitoba.ca WWW: http://www.cs.umanitoba.ca/~jacky Salient Spatial Features Trying to find interest points Points
INTEREST POINTS AT DIFFERENT SCALES
 INTEREST POINTS AT DIFFERENT SCALES Thank you for the slides. They come mostly from the following sources. Dan Huttenlocher Cornell U David Lowe U. of British Columbia Martial Hebert CMU Intuitively, junctions
INTEREST POINTS AT DIFFERENT SCALES Thank you for the slides. They come mostly from the following sources. Dan Huttenlocher Cornell U David Lowe U. of British Columbia Martial Hebert CMU Intuitively, junctions
Lecture 6: Finding Features (part 1/2)
") Lecture 6: Finding Features (part 1/2) Professor Fei- Fei Li Stanford Vision Lab Lecture 6 -! 1 What we will learn today? Local invariant features MoHvaHon Requirements, invariances Keypoint localizahon
Lecture 6: Finding Features (part 1/2) Professor Fei- Fei Li Stanford Vision Lab Lecture 6 -! 1 What we will learn today? Local invariant features MoHvaHon Requirements, invariances Keypoint localizahon
Overview. Introduction to local features. Harris interest points + SSD, ZNCC, SIFT. Evaluation and comparison of different detectors
 Overview Introduction to local features Harris interest points + SSD, ZNCC, SIFT Scale & affine invariant interest point detectors Evaluation and comparison of different detectors Region descriptors and
Overview Introduction to local features Harris interest points + SSD, ZNCC, SIFT Scale & affine invariant interest point detectors Evaluation and comparison of different detectors Region descriptors and
Wavelet-based Salient Points with Scale Information for Classification
 Wavelet-based Salient Points with Scale Information for Classification Alexandra Teynor and Hans Burkhardt Department of Computer Science, Albert-Ludwigs-Universität Freiburg, Germany {teynor, Hans.Burkhardt}@informatik.uni-freiburg.de
Wavelet-based Salient Points with Scale Information for Classification Alexandra Teynor and Hans Burkhardt Department of Computer Science, Albert-Ludwigs-Universität Freiburg, Germany {teynor, Hans.Burkhardt}@informatik.uni-freiburg.de
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil nfrastructure Eng. & Mgmt. Session 9- mage Detectors, Part Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering Lab e-mail:
CEE598 - Visual Sensing for Civil nfrastructure Eng. & Mgmt. Session 9- mage Detectors, Part Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering Lab e-mail:
Scale-space image processing
 Scale-space image processing Corresponding image features can appear at different scales Like shift-invariance, scale-invariance of image processing algorithms is often desirable. Scale-space representation
Scale-space image processing Corresponding image features can appear at different scales Like shift-invariance, scale-invariance of image processing algorithms is often desirable. Scale-space representation
Invariant local features. Invariant Local Features. Classes of transformations. (Good) invariant local features. Case study: panorama stitching
 invariant local features. Case study: panorama stitching") Invariant local eatures Invariant Local Features Tuesday, February 6 Subset o local eature types designed to be invariant to Scale Translation Rotation Aine transormations Illumination 1) Detect distinctive
Invariant local eatures Invariant Local Features Tuesday, February 6 Subset o local eature types designed to be invariant to Scale Translation Rotation Aine transormations Illumination 1) Detect distinctive
Maximally Stable Local Description for Scale Selection
 Maximally Stable Local Description for Scale Selection Gyuri Dorkó and Cordelia Schmid INRIA Rhône-Alpes, 655 Avenue de l Europe, 38334 Montbonnot, France {gyuri.dorko,cordelia.schmid}@inrialpes.fr Abstract.
Maximally Stable Local Description for Scale Selection Gyuri Dorkó and Cordelia Schmid INRIA Rhône-Alpes, 655 Avenue de l Europe, 38334 Montbonnot, France {gyuri.dorko,cordelia.schmid}@inrialpes.fr Abstract.
Lecture 12. Local Feature Detection. Matching with Invariant Features. Why extract features? Why extract features? Why extract features?
 Lecture 1 Why extract eatures? Motivation: panorama stitching We have two images how do we combine them? Local Feature Detection Guest lecturer: Alex Berg Reading: Harris and Stephens David Lowe IJCV We
Lecture 1 Why extract eatures? Motivation: panorama stitching We have two images how do we combine them? Local Feature Detection Guest lecturer: Alex Berg Reading: Harris and Stephens David Lowe IJCV We
Image matching. by Diva Sian. by swashford
 Image matching by Diva Sian by swashford Harder case by Diva Sian by scgbt Invariant local features Find features that are invariant to transformations geometric invariance: translation, rotation, scale
Image matching by Diva Sian by swashford Harder case by Diva Sian by scgbt Invariant local features Find features that are invariant to transformations geometric invariance: translation, rotation, scale
Lecture 7: Finding Features (part 2/2)
") Lecture 7: Finding Features (part 2/2) Professor Fei- Fei Li Stanford Vision Lab Lecture 7 -! 1 What we will learn today? Local invariant features MoHvaHon Requirements, invariances Keypoint localizahon
Lecture 7: Finding Features (part 2/2) Professor Fei- Fei Li Stanford Vision Lab Lecture 7 -! 1 What we will learn today? Local invariant features MoHvaHon Requirements, invariances Keypoint localizahon
Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems
 Robots for People --- A project for intelligent integrated systems") 1 Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems V. Estivill-Castro 2 Perception Concepts Vision Chapter 4 (textbook) Sections 4.3 to 4.5 What is the course
1 Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems V. Estivill-Castro 2 Perception Concepts Vision Chapter 4 (textbook) Sections 4.3 to 4.5 What is the course
arxiv: v1 [cs.cv] 10 Feb 2016
![arxiv: v1 [cs.cv] 10 Feb 2016](/thumbs/76/73522588.jpg "arxiv: v1 [cs.cv] 10 Feb 2016") GABOR WAVELETS IN IMAGE PROCESSING David Bařina Doctoral Degree Programme (2), FIT BUT E-mail: xbarin2@stud.fit.vutbr.cz Supervised by: Pavel Zemčík E-mail: zemcik@fit.vutbr.cz arxiv:162.338v1 [cs.cv]
GABOR WAVELETS IN IMAGE PROCESSING David Bařina Doctoral Degree Programme (2), FIT BUT E-mail: xbarin2@stud.fit.vutbr.cz Supervised by: Pavel Zemčík E-mail: zemcik@fit.vutbr.cz arxiv:162.338v1 [cs.cv]
Lecture 7: Finding Features (part 2/2)
") Lecture 7: Finding Features (part 2/2) Dr. Juan Carlos Niebles Stanford AI Lab Professor Fei- Fei Li Stanford Vision Lab 1 What we will learn today? Local invariant features MoPvaPon Requirements, invariances
Lecture 7: Finding Features (part 2/2) Dr. Juan Carlos Niebles Stanford AI Lab Professor Fei- Fei Li Stanford Vision Lab 1 What we will learn today? Local invariant features MoPvaPon Requirements, invariances
Lecture 8: Interest Point Detection. Saad J Bedros
 #1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Last Lecture : Edge Detection Preprocessing of image is desired to eliminate or at least minimize noise effects There is always tradeoff
#1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Last Lecture : Edge Detection Preprocessing of image is desired to eliminate or at least minimize noise effects There is always tradeoff
Affine Adaptation of Local Image Features Using the Hessian Matrix
 29 Advanced Video and Signal Based Surveillance Affine Adaptation of Local Image Features Using the Hessian Matrix Ruan Lakemond, Clinton Fookes, Sridha Sridharan Image and Video Research Laboratory Queensland
29 Advanced Video and Signal Based Surveillance Affine Adaptation of Local Image Features Using the Hessian Matrix Ruan Lakemond, Clinton Fookes, Sridha Sridharan Image and Video Research Laboratory Queensland
The state of the art and beyond
 Feature Detectors and Descriptors The state of the art and beyond Local covariant detectors and descriptors have been successful in many applications Registration Stereo vision Motion estimation Matching
Feature Detectors and Descriptors The state of the art and beyond Local covariant detectors and descriptors have been successful in many applications Registration Stereo vision Motion estimation Matching
Orientation Map Based Palmprint Recognition
 Orientation Map Based Palmprint Recognition (BM) 45 Orientation Map Based Palmprint Recognition B. H. Shekar, N. Harivinod bhshekar@gmail.com, harivinodn@gmail.com India, Mangalore University, Department
Orientation Map Based Palmprint Recognition (BM) 45 Orientation Map Based Palmprint Recognition B. H. Shekar, N. Harivinod bhshekar@gmail.com, harivinodn@gmail.com India, Mangalore University, Department
Given a feature in I 1, how to find the best match in I 2?
 Feature Matching 1 Feature matching Given a feature in I 1, how to find the best match in I 2? 1. Define distance function that compares two descriptors 2. Test all the features in I 2, find the one with
Feature Matching 1 Feature matching Given a feature in I 1, how to find the best match in I 2? 1. Define distance function that compares two descriptors 2. Test all the features in I 2, find the one with
SIFT: SCALE INVARIANT FEATURE TRANSFORM BY DAVID LOWE
 SIFT: SCALE INVARIANT FEATURE TRANSFORM BY DAVID LOWE Overview Motivation of Work Overview of Algorithm Scale Space and Difference of Gaussian Keypoint Localization Orientation Assignment Descriptor Building
SIFT: SCALE INVARIANT FEATURE TRANSFORM BY DAVID LOWE Overview Motivation of Work Overview of Algorithm Scale Space and Difference of Gaussian Keypoint Localization Orientation Assignment Descriptor Building
Instance-level recognition: Local invariant features. Cordelia Schmid INRIA, Grenoble
 nstance-level recognition: ocal invariant features Cordelia Schmid NRA Grenoble Overview ntroduction to local features Harris interest points + SSD ZNCC SFT Scale & affine invariant interest point detectors
nstance-level recognition: ocal invariant features Cordelia Schmid NRA Grenoble Overview ntroduction to local features Harris interest points + SSD ZNCC SFT Scale & affine invariant interest point detectors
Edge Detection. CS 650: Computer Vision
 CS 650: Computer Vision Edges and Gradients Edge: local indication of an object transition Edge detection: local operators that find edges (usually involves convolution) Local intensity transitions are
CS 650: Computer Vision Edges and Gradients Edge: local indication of an object transition Edge detection: local operators that find edges (usually involves convolution) Local intensity transitions are
Corner detection: the basic idea
 Corner detection: the basic idea At a corner, shifting a window in any direction should give a large change in intensity flat region: no change in all directions edge : no change along the edge direction
Corner detection: the basic idea At a corner, shifting a window in any direction should give a large change in intensity flat region: no change in all directions edge : no change along the edge direction
Filtering and Edge Detection
 Filtering and Edge Detection Local Neighborhoods Hard to tell anything from a single pixel Example: you see a reddish pixel. Is this the object s color? Illumination? Noise? The next step in order of complexity
Filtering and Edge Detection Local Neighborhoods Hard to tell anything from a single pixel Example: you see a reddish pixel. Is this the object s color? Illumination? Noise? The next step in order of complexity
Local Features (contd.)
") Motivation Local Features (contd.) Readings: Mikolajczyk and Schmid; F&P Ch 10 Feature points are used also or: Image alignment (homography, undamental matrix) 3D reconstruction Motion tracking Object
Motivation Local Features (contd.) Readings: Mikolajczyk and Schmid; F&P Ch 10 Feature points are used also or: Image alignment (homography, undamental matrix) 3D reconstruction Motion tracking Object
Lecture 6: Edge Detection. CAP 5415: Computer Vision Fall 2008
 Lecture 6: Edge Detection CAP 5415: Computer Vision Fall 2008 Announcements PS 2 is available Please read it by Thursday During Thursday lecture, I will be going over it in some detail Monday - Computer
Lecture 6: Edge Detection CAP 5415: Computer Vision Fall 2008 Announcements PS 2 is available Please read it by Thursday During Thursday lecture, I will be going over it in some detail Monday - Computer
Accumulated Stability Voting: A Robust Descriptor from Descriptors of Multiple Scales
 Accumulated Stability Voting: A Robust Descriptor from Descriptors of Multiple Scales Tsun-Yi Yang,2 Yen-Yu Lin Yung-Yu Chuang 2 Academia Sinica, Taiwan 2 National Taiwan University, Taiwan {shamangary,yylin}@citi.sinica.edu.tw
Accumulated Stability Voting: A Robust Descriptor from Descriptors of Multiple Scales Tsun-Yi Yang,2 Yen-Yu Lin Yung-Yu Chuang 2 Academia Sinica, Taiwan 2 National Taiwan University, Taiwan {shamangary,yylin}@citi.sinica.edu.tw
Machine vision. Summary # 4. The mask for Laplacian is given
 1 Machine vision Summary # 4 The mask for Laplacian is given L = 0 1 0 1 4 1 (6) 0 1 0 Another Laplacian mask that gives more importance to the center element is L = 1 1 1 1 8 1 (7) 1 1 1 Note that the
1 Machine vision Summary # 4 The mask for Laplacian is given L = 0 1 0 1 4 1 (6) 0 1 0 Another Laplacian mask that gives more importance to the center element is L = 1 1 1 1 8 1 (7) 1 1 1 Note that the
SIFT: Scale Invariant Feature Transform
 1 SIFT: Scale Invariant Feature Transform With slides from Sebastian Thrun Stanford CS223B Computer Vision, Winter 2006 3 Pattern Recognition Want to find in here SIFT Invariances: Scaling Rotation Illumination
1 SIFT: Scale Invariant Feature Transform With slides from Sebastian Thrun Stanford CS223B Computer Vision, Winter 2006 3 Pattern Recognition Want to find in here SIFT Invariances: Scaling Rotation Illumination
Lecture 7: Edge Detection
 #1 Lecture 7: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Definition of an Edge First Order Derivative Approximation as Edge Detector #2 This Lecture Examples of Edge Detection
#1 Lecture 7: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Definition of an Edge First Order Derivative Approximation as Edge Detector #2 This Lecture Examples of Edge Detection
Machine vision, spring 2018 Summary 4
 Machine vision Summary # 4 The mask for Laplacian is given L = 4 (6) Another Laplacian mask that gives more importance to the center element is given by L = 8 (7) Note that the sum of the elements in the
Machine vision Summary # 4 The mask for Laplacian is given L = 4 (6) Another Laplacian mask that gives more importance to the center element is given by L = 8 (7) Note that the sum of the elements in the
EE 6882 Visual Search Engine
 EE 6882 Visual Search Engine Prof. Shih Fu Chang, Feb. 13 th 2012 Lecture #4 Local Feature Matching Bag of Word image representation: coding and pooling (Many slides from A. Efors, W. Freeman, C. Kambhamettu,
EE 6882 Visual Search Engine Prof. Shih Fu Chang, Feb. 13 th 2012 Lecture #4 Local Feature Matching Bag of Word image representation: coding and pooling (Many slides from A. Efors, W. Freeman, C. Kambhamettu,
Lesson 04. KAZE, Non-linear diffusion filtering, ORB, MSER. Ing. Marek Hrúz, Ph.D.
 Lesson 04 KAZE, Non-linear diffusion filtering, ORB, MSER Ing. Marek Hrúz, Ph.D. Katedra Kybernetiky Fakulta aplikovaných věd Západočeská univerzita v Plzni Lesson 04 KAZE ORB: an efficient alternative
Lesson 04 KAZE, Non-linear diffusion filtering, ORB, MSER Ing. Marek Hrúz, Ph.D. Katedra Kybernetiky Fakulta aplikovaných věd Západočeská univerzita v Plzni Lesson 04 KAZE ORB: an efficient alternative
Roadmap. Introduction to image analysis (computer vision) Theory of edge detection. Applications
 Theory of edge detection. Applications") Edge Detection Roadmap Introduction to image analysis (computer vision) Its connection with psychology and neuroscience Why is image analysis difficult? Theory of edge detection Gradient operator Advanced
Edge Detection Roadmap Introduction to image analysis (computer vision) Its connection with psychology and neuroscience Why is image analysis difficult? Theory of edge detection Gradient operator Advanced
Instance-level l recognition. Cordelia Schmid INRIA
 nstance-level l recognition Cordelia Schmid NRA nstance-level recognition Particular objects and scenes large databases Application Search photos on the web for particular places Find these landmars...in
nstance-level l recognition Cordelia Schmid NRA nstance-level recognition Particular objects and scenes large databases Application Search photos on the web for particular places Find these landmars...in
Fast Explicit Diffusion for Accelerated Features in Nonlinear Scale Spaces
 ALCANTARILLA et al.: FAST EXPLICIT DIFFUSION FOR ACCELERATED FEATURES IN NONLINEAR SCALE SPACES 1 Fast Explicit Diffusion for Accelerated Features in Nonlinear Scale Spaces Pablo F. Alcantarilla pablo.alcantarilla@gatech.edu
ALCANTARILLA et al.: FAST EXPLICIT DIFFUSION FOR ACCELERATED FEATURES IN NONLINEAR SCALE SPACES 1 Fast Explicit Diffusion for Accelerated Features in Nonlinear Scale Spaces Pablo F. Alcantarilla pablo.alcantarilla@gatech.edu
SURVEY OF APPEARANCE-BASED METHODS FOR OBJECT RECOGNITION
 SURVEY OF APPEARANCE-BASED METHODS FOR OBJECT RECOGNITION Peter M. Roth and Martin Winter Inst. for Computer Graphics and Vision Graz University of Technology, Austria Technical Report ICG TR 01/08 Graz,
SURVEY OF APPEARANCE-BASED METHODS FOR OBJECT RECOGNITION Peter M. Roth and Martin Winter Inst. for Computer Graphics and Vision Graz University of Technology, Austria Technical Report ICG TR 01/08 Graz,
Robert Collins CSE598G Mean-Shift Blob Tracking through Scale Space
 Mean-Shift Blob Tracking through Scale Space Robert Collins, CVPR 03 Abstract Mean-shift tracking Choosing scale of kernel is an issue Scale-space feature selection provides inspiration Perform mean-shift
Mean-Shift Blob Tracking through Scale Space Robert Collins, CVPR 03 Abstract Mean-shift tracking Choosing scale of kernel is an issue Scale-space feature selection provides inspiration Perform mean-shift
KAZE Features. 1 Introduction. Pablo Fernández Alcantarilla 1, Adrien Bartoli 1, and Andrew J. Davison 2
 KAZE Features Pablo Fernández Alcantarilla 1, Adrien Bartoli 1, and Andrew J. Davison 2 1 ISIT-UMR 6284 CNRS, Université d Auvergne, Clermont Ferrand, France {pablo.alcantarilla,adrien.bartoli}@gmail.com
KAZE Features Pablo Fernández Alcantarilla 1, Adrien Bartoli 1, and Andrew J. Davison 2 1 ISIT-UMR 6284 CNRS, Université d Auvergne, Clermont Ferrand, France {pablo.alcantarilla,adrien.bartoli}@gmail.com
Keypoint extraction: Corners Harris Corners Pkwy, Charlotte, NC
 Kepoint etraction: Corners 9300 Harris Corners Pkw Charlotte NC Wh etract kepoints? Motivation: panorama stitching We have two images how do we combine them? Wh etract kepoints? Motivation: panorama stitching
Kepoint etraction: Corners 9300 Harris Corners Pkw Charlotte NC Wh etract kepoints? Motivation: panorama stitching We have two images how do we combine them? Wh etract kepoints? Motivation: panorama stitching
CS4670: Computer Vision Kavita Bala. Lecture 7: Harris Corner Detec=on
 CS4670: Computer Vision Kavita Bala Lecture 7: Harris Corner Detec=on Announcements HW 1 will be out soon Sign up for demo slots for PA 1 Remember that both partners have to be there We will ask you to
CS4670: Computer Vision Kavita Bala Lecture 7: Harris Corner Detec=on Announcements HW 1 will be out soon Sign up for demo slots for PA 1 Remember that both partners have to be there We will ask you to
Instance-level recognition: Local invariant features. Cordelia Schmid INRIA, Grenoble
 nstance-level recognition: ocal invariant features Cordelia Schmid NRA Grenoble Overview ntroduction to local features Harris interest points + SSD ZNCC SFT Scale & affine invariant interest point detectors
nstance-level recognition: ocal invariant features Cordelia Schmid NRA Grenoble Overview ntroduction to local features Harris interest points + SSD ZNCC SFT Scale & affine invariant interest point detectors
Edge Detection. Introduction to Computer Vision. Useful Mathematics Funcs. The bad news
 Edge Detection Introduction to Computer Vision CS / ECE 8B Thursday, April, 004 Edge detection (HO #5) Edge detection is a local area operator that seeks to find significant, meaningful changes in image
Edge Detection Introduction to Computer Vision CS / ECE 8B Thursday, April, 004 Edge detection (HO #5) Edge detection is a local area operator that seeks to find significant, meaningful changes in image
Instance-level l recognition. Cordelia Schmid & Josef Sivic INRIA
 nstance-level l recognition Cordelia Schmid & Josef Sivic NRA nstance-level recognition Particular objects and scenes large databases Application Search photos on the web for particular places Find these
nstance-level l recognition Cordelia Schmid & Josef Sivic NRA nstance-level recognition Particular objects and scenes large databases Application Search photos on the web for particular places Find these
Scale Space Smoothing, Image Feature Extraction and Bessel Filters
 Scale Space Smoothing, Image Feature Extraction and Bessel Filters Sasan Mahmoodi and Steve Gunn School of Electronics and Computer Science, Building 1, Southampton University, Southampton, SO17 1BJ, UK
Scale Space Smoothing, Image Feature Extraction and Bessel Filters Sasan Mahmoodi and Steve Gunn School of Electronics and Computer Science, Building 1, Southampton University, Southampton, SO17 1BJ, UK
Feature extraction: Corners and blobs
 Featre etraction: Corners and blobs Wh etract featres? Motiation: panorama stitching We hae two images how do we combine them? Wh etract featres? Motiation: panorama stitching We hae two images how do
Featre etraction: Corners and blobs Wh etract featres? Motiation: panorama stitching We hae two images how do we combine them? Wh etract featres? Motiation: panorama stitching We hae two images how do
Feature Vector Similarity Based on Local Structure
 Feature Vector Similarity Based on Local Structure Evgeniya Balmachnova, Luc Florack, and Bart ter Haar Romeny Eindhoven University of Technology, P.O. Box 53, 5600 MB Eindhoven, The Netherlands {E.Balmachnova,L.M.J.Florack,B.M.terHaarRomeny}@tue.nl
Feature Vector Similarity Based on Local Structure Evgeniya Balmachnova, Luc Florack, and Bart ter Haar Romeny Eindhoven University of Technology, P.O. Box 53, 5600 MB Eindhoven, The Netherlands {E.Balmachnova,L.M.J.Florack,B.M.terHaarRomeny}@tue.nl
Face detection and recognition. Detection Recognition Sally
 Face detection and recognition Detection Recognition Sally Face detection & recognition Viola & Jones detector Available in open CV Face recognition Eigenfaces for face recognition Metric learning identification
Face detection and recognition Detection Recognition Sally Face detection & recognition Viola & Jones detector Available in open CV Face recognition Eigenfaces for face recognition Metric learning identification
Hilbert-Huang Transform-based Local Regions Descriptors
 Hilbert-Huang Transform-based Local Regions Descriptors Dongfeng Han, Wenhui Li, Wu Guo Computer Science and Technology, Key Laboratory of Symbol Computation and Knowledge Engineering of the Ministry of
Hilbert-Huang Transform-based Local Regions Descriptors Dongfeng Han, Wenhui Li, Wu Guo Computer Science and Technology, Key Laboratory of Symbol Computation and Knowledge Engineering of the Ministry of
Edge Detection PSY 5018H: Math Models Hum Behavior, Prof. Paul Schrater, Spring 2005
 Edge Detection PSY 5018H: Math Models Hum Behavior, Prof. Paul Schrater, Spring 2005 Gradients and edges Points of sharp change in an image are interesting: change in reflectance change in object change
Edge Detection PSY 5018H: Math Models Hum Behavior, Prof. Paul Schrater, Spring 2005 Gradients and edges Points of sharp change in an image are interesting: change in reflectance change in object change
ECE Digital Image Processing and Introduction to Computer Vision. Outline
 2/9/7 ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 207. Recap Outline 2. Sharpening Filtering Illustration
2/9/7 ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 207. Recap Outline 2. Sharpening Filtering Illustration
Visual Object Recognition
 Visual Object Recognition Lecture 2: Image Formation Per-Erik Forssén, docent Computer Vision Laboratory Department of Electrical Engineering Linköping University Lecture 2: Image Formation Pin-hole, and
Visual Object Recognition Lecture 2: Image Formation Per-Erik Forssén, docent Computer Vision Laboratory Department of Electrical Engineering Linköping University Lecture 2: Image Formation Pin-hole, and
SIFT, GLOH, SURF descriptors. Dipartimento di Sistemi e Informatica
 SIFT, GLOH, SURF descriptors Dipartimento di Sistemi e Informatica Invariant local descriptor: Useful for Object RecogniAon and Tracking. Robot LocalizaAon and Mapping. Image RegistraAon and SAtching.
SIFT, GLOH, SURF descriptors Dipartimento di Sistemi e Informatica Invariant local descriptor: Useful for Object RecogniAon and Tracking. Robot LocalizaAon and Mapping. Image RegistraAon and SAtching.
38 1 Vol. 38, No ACTA AUTOMATICA SINICA January, Bag-of-phrases.. Image Representation Using Bag-of-phrases
 38 1 Vol. 38, No. 1 2012 1 ACTA AUTOMATICA SINICA January, 2012 Bag-of-phrases 1, 2 1 1 1, Bag-of-words,,, Bag-of-words, Bag-of-phrases, Bag-of-words DOI,, Bag-of-words, Bag-of-phrases, SIFT 10.3724/SP.J.1004.2012.00046
38 1 Vol. 38, No. 1 2012 1 ACTA AUTOMATICA SINICA January, 2012 Bag-of-phrases 1, 2 1 1 1, Bag-of-words,,, Bag-of-words, Bag-of-phrases, Bag-of-words DOI,, Bag-of-words, Bag-of-phrases, SIFT 10.3724/SP.J.1004.2012.00046
Instance-level recognition: Local invariant features. Cordelia Schmid INRIA, Grenoble
 nstance-level recognition: ocal invariant features Cordelia Schmid NRA Grenoble Overview ntroduction to local features Harris interest t points + SSD ZNCC SFT Scale & affine invariant interest point detectors
nstance-level recognition: ocal invariant features Cordelia Schmid NRA Grenoble Overview ntroduction to local features Harris interest t points + SSD ZNCC SFT Scale & affine invariant interest point detectors
Scale & Affine Invariant Interest Point Detectors
 Scale & Affine Invariant Interest Point Detectors KRYSTIAN MIKOLAJCZYK AND CORDELIA SCHMID [2004] Shreyas Saxena Gurkirit Singh 23/11/2012 Introduction We are interested in finding interest points. What
Scale & Affine Invariant Interest Point Detectors KRYSTIAN MIKOLAJCZYK AND CORDELIA SCHMID [2004] Shreyas Saxena Gurkirit Singh 23/11/2012 Introduction We are interested in finding interest points. What
Global Scene Representations. Tilke Judd
 Global Scene Representations Tilke Judd Papers Oliva and Torralba [2001] Fei Fei and Perona [2005] Labzebnik, Schmid and Ponce [2006] Commonalities Goal: Recognize natural scene categories Extract features
Global Scene Representations Tilke Judd Papers Oliva and Torralba [2001] Fei Fei and Perona [2005] Labzebnik, Schmid and Ponce [2006] Commonalities Goal: Recognize natural scene categories Extract features
Advanced Features. Advanced Features: Topics. Jana Kosecka. Slides from: S. Thurn, D. Lowe, Forsyth and Ponce. Advanced features and feature matching
 Advanced Features Jana Kosecka Slides from: S. Thurn, D. Lowe, Forsyth and Ponce Advanced Features: Topics Advanced features and feature matching Template matching SIFT features Haar features 2 1 Features
Advanced Features Jana Kosecka Slides from: S. Thurn, D. Lowe, Forsyth and Ponce Advanced Features: Topics Advanced features and feature matching Template matching SIFT features Haar features 2 1 Features
Feature detection.
 Feature detection Kim Steenstrup Pedersen kimstp@itu.dk The IT University of Copenhagen Feature detection, The IT University of Copenhagen p.1/20 What is a feature? Features can be thought of as symbolic
Feature detection Kim Steenstrup Pedersen kimstp@itu.dk The IT University of Copenhagen Feature detection, The IT University of Copenhagen p.1/20 What is a feature? Features can be thought of as symbolic
On the Completeness of Coding with Image Features
 FÖRSTNER ET AL.: COMPLETENESS OF CODING WITH FEATURES 1 On the Completeness of Coding with Image Features Wolfgang Förstner http://www.ipb.uni-bonn.de/foerstner/ Timo Dickscheid http://www.ipb.uni-bonn.de/timodickscheid/
FÖRSTNER ET AL.: COMPLETENESS OF CODING WITH FEATURES 1 On the Completeness of Coding with Image Features Wolfgang Förstner http://www.ipb.uni-bonn.de/foerstner/ Timo Dickscheid http://www.ipb.uni-bonn.de/timodickscheid/
Templates, Image Pyramids, and Filter Banks
 Templates, Image Pyramids, and Filter Banks 09/9/ Computer Vision James Hays, Brown Slides: Hoiem and others Review. Match the spatial domain image to the Fourier magnitude image 2 3 4 5 B A C D E Slide:
Templates, Image Pyramids, and Filter Banks 09/9/ Computer Vision James Hays, Brown Slides: Hoiem and others Review. Match the spatial domain image to the Fourier magnitude image 2 3 4 5 B A C D E Slide:
ECE 468: Digital Image Processing. Lecture 8
 ECE 68: Digital Image Processing Lecture 8 Prof. Sinisa Todorovic sinisa@eecs.oregonstate.edu 1 Point Descriptors Point Descriptors Describe image properties in the neighborhood of a keypoint Descriptors
ECE 68: Digital Image Processing Lecture 8 Prof. Sinisa Todorovic sinisa@eecs.oregonstate.edu 1 Point Descriptors Point Descriptors Describe image properties in the neighborhood of a keypoint Descriptors
Large-scale classification of traffic signs under real-world conditions
 Large-scale classification of traffic signs under real-world conditions Lykele Hazelhoff a,b, Ivo Creusen a,b, Dennis van de Wouw a,b and Peter H.N. de With a,b a CycloMedia Technology B.V., Achterweg
Large-scale classification of traffic signs under real-world conditions Lykele Hazelhoff a,b, Ivo Creusen a,b, Dennis van de Wouw a,b and Peter H.N. de With a,b a CycloMedia Technology B.V., Achterweg
Region Moments: Fast invariant descriptors for detecting small image structures
 Region Moments: Fast invariant descriptors for detecting small image structures Gianfranco Doretto Yi Yao Visualization and Computer Vision Lab, GE Global Research, Niskayuna, NY 39 doretto@research.ge.com
Region Moments: Fast invariant descriptors for detecting small image structures Gianfranco Doretto Yi Yao Visualization and Computer Vision Lab, GE Global Research, Niskayuna, NY 39 doretto@research.ge.com
Harris Corner Detector
 Multimedia Computing: Algorithms, Systems, and Applications: Feature Extraction By Dr. Yu Cao Department of Computer Science The University of Massachusetts Lowell Lowell, MA 01854, USA Part of the slides
Multimedia Computing: Algorithms, Systems, and Applications: Feature Extraction By Dr. Yu Cao Department of Computer Science The University of Massachusetts Lowell Lowell, MA 01854, USA Part of the slides
Image Processing 1 (IP1) Bildverarbeitung 1
 Bildverarbeitung 1") MIN-Fakultät Fachbereich Informatik Arbeitsbereich SAV/BV KOGS Image Processing 1 IP1 Bildverarbeitung 1 Lecture : Object Recognition Winter Semester 015/16 Slides: Prof. Bernd Neumann Slightly revised
MIN-Fakultät Fachbereich Informatik Arbeitsbereich SAV/BV KOGS Image Processing 1 IP1 Bildverarbeitung 1 Lecture : Object Recognition Winter Semester 015/16 Slides: Prof. Bernd Neumann Slightly revised
Edge Detection. Computer Vision P. Schrater Spring 2003
 Edge Detection Computer Vision P. Schrater Spring 2003 Simplest Model: (Canny) Edge(x) = a U(x) + n(x) U(x)? x=0 Convolve image with U and find points with high magnitude. Choose value by comparing with
Edge Detection Computer Vision P. Schrater Spring 2003 Simplest Model: (Canny) Edge(x) = a U(x) + n(x) U(x)? x=0 Convolve image with U and find points with high magnitude. Choose value by comparing with
Shape of Gaussians as Feature Descriptors
 Shape of Gaussians as Feature Descriptors Liyu Gong, Tianjiang Wang and Fang Liu Intelligent and Distributed Computing Lab, School of Computer Science and Technology Huazhong University of Science and
Shape of Gaussians as Feature Descriptors Liyu Gong, Tianjiang Wang and Fang Liu Intelligent and Distributed Computing Lab, School of Computer Science and Technology Huazhong University of Science and
Learning Discriminative and Transformation Covariant Local Feature Detectors
 Learning Discriminative and Transformation Covariant Local Feature Detectors Xu Zhang 1, Felix X. Yu 2, Svebor Karaman 1, Shih-Fu Chang 1 1 Columbia University, 2 Google Research {xu.zhang, svebor.karaman,
Learning Discriminative and Transformation Covariant Local Feature Detectors Xu Zhang 1, Felix X. Yu 2, Svebor Karaman 1, Shih-Fu Chang 1 1 Columbia University, 2 Google Research {xu.zhang, svebor.karaman,
Fisher Vector image representation
 Fisher Vector image representation Machine Learning and Category Representation 2014-2015 Jakob Verbeek, January 9, 2015 Course website: http://lear.inrialpes.fr/~verbeek/mlcr.14.15 A brief recap on kernel
Fisher Vector image representation Machine Learning and Category Representation 2014-2015 Jakob Verbeek, January 9, 2015 Course website: http://lear.inrialpes.fr/~verbeek/mlcr.14.15 A brief recap on kernel
Urban land use information retrieval based on scene classification of Google Street View images
 Urban land use information retrieval based on scene classification of Google Street View images Xiaojiang Li 1, Chuanrong Zhang 1 1 Department of Geography, University of Connecticut, Storrs Email: {xiaojiang.li;chuanrong.zhang}@uconn.edu
Urban land use information retrieval based on scene classification of Google Street View images Xiaojiang Li 1, Chuanrong Zhang 1 1 Department of Geography, University of Connecticut, Storrs Email: {xiaojiang.li;chuanrong.zhang}@uconn.edu
Space-time Zernike Moments and Pyramid Kernel Descriptors for Action Classification
 Space-time Zernike Moments and Pyramid Kernel Descriptors for Action Classification Luca Costantini 2, Lorenzo Seidenari 1, Giuseppe Serra 1, Licia Capodiferro 2, and Alberto Del Bimbo 1 1 Media Integration
Space-time Zernike Moments and Pyramid Kernel Descriptors for Action Classification Luca Costantini 2, Lorenzo Seidenari 1, Giuseppe Serra 1, Licia Capodiferro 2, and Alberto Del Bimbo 1 1 Media Integration
Introduction to Computer Vision
 Introduction to Computer Vision Michael J. Black Sept 2009 Lecture 8: Pyramids and image derivatives Goals Images as functions Derivatives of images Edges and gradients Laplacian pyramids Code for lecture
Introduction to Computer Vision Michael J. Black Sept 2009 Lecture 8: Pyramids and image derivatives Goals Images as functions Derivatives of images Edges and gradients Laplacian pyramids Code for lecture
Edge Detection in Computer Vision Systems
 1 CS332 Visual Processing in Computer and Biological Vision Systems Edge Detection in Computer Vision Systems This handout summarizes much of the material on the detection and description of intensity
1 CS332 Visual Processing in Computer and Biological Vision Systems Edge Detection in Computer Vision Systems This handout summarizes much of the material on the detection and description of intensity
Distinguish between different types of scenes. Matching human perception Understanding the environment
 Scene Recognition Adriana Kovashka UTCS, PhD student Problem Statement Distinguish between different types of scenes Applications Matching human perception Understanding the environment Indexing of images
Scene Recognition Adriana Kovashka UTCS, PhD student Problem Statement Distinguish between different types of scenes Applications Matching human perception Understanding the environment Indexing of images
Discriminative part-based models. Many slides based on P. Felzenszwalb
 More sliding window detection: ti Discriminative part-based models Many slides based on P. Felzenszwalb Challenge: Generic object detection Pedestrian detection Features: Histograms of oriented gradients
More sliding window detection: ti Discriminative part-based models Many slides based on P. Felzenszwalb Challenge: Generic object detection Pedestrian detection Features: Histograms of oriented gradients