Intensity Transformations and Spatial Filtering: WHICH ONE LOOKS BETTER? Intensity Transformations and Spatial Filtering: WHICH ONE LOOKS BETTER?
|
|
|
- Clement King
- 6 years ago
- Views:
Transcription



1 : WHICH ONE LOOKS BETTER? 3.1 : WHICH ONE LOOKS BETTER? 3.2 1
2 Goal: Image enhancement seeks to improve the visual appearance of an image, or convert it to a form suited for analysis by a human or a machine. Image enhancement does not, however, seek to restore the image, nor increase its information contents Peculiarity: actually, there is some evidence which suggests that a distorted image can be more pleasing than a perfect image! 3.3 Information Content Suppose a source, e.g. an image generates a discrete set of independent messages (grey levels) r k, with probabilities p k, k=1,...,l. Then the information associated with r k is defined as I k =-log 2 p k bits Since the sum of p k s is 1 and each p k 1, I k is nonnegative. This definition also implies that the information conveyed is large when an unlikely message is generated
3 Major Problem in Image Enhancement: the lack of a general standard dof image quality makes it very difficult to evaluate the performance of different IE schemes. Thus, Image Enhancement algorithms are mostly application-dependent, subjective and often ad- hoc. Therefore, mostly subjective criteria are used in evaluating image enhancement algorithms. 3.5 Subjective Criteria Used in Image Enhancement A. Goodness scale: how good an image is B. Impairment scale: how bad the degradation is in an image Overall goodness Group goodness scale not noticeable (1) scale just noticeable (2) Excellent (5) Best (7) definitely noticeable but only slight impairment (3) impairment acceptable (4) Good (4) Well above average (6) somewhat objectionable (5) definitely objectionable (6) Fair (3) Slightly above average (5) extremely objectionable (7) Poor (2) Average (4) Unsatisfactory (1) Slightly below average (3) Well below average (2) Worst (1) the numbers in parenthesis indicate a numerical weight attached to the rating
4 Spacial Domain: g(x, = T[f(x,] f(x, is the original image, g(x, is the output image and T[.] is an operator on f defined over a neighborhood of (x,. Special case: neighborhood size is 1 pixel T[.] is called 3.7 intensity or mapping transformation function. Lack of contrast 3.8 4
5 Contrast Stretching Poor contrast is the most common defect in images and is caused by reduced d and/or nonlinear amplitude range or poor lighting conditions. A typical contrast stretching transformation is shown below (examples are given later): v v c v b γ β v a α 0 a b L u 3.9 Contrast Stretching A special case of contrast stretching is illustrated above (bi-level output) and is called thresholding
![Basic Grey Level Transformations s = T[r] 3.](/docs-images/72/66494101/images/6-2.jpg "11 Image Negative s = L -1 - r r is the input grey level, s is the output grey level")
6 Basic Grey Level Transformations s = T[r] 3.11 Image Negative s = L -1 - r r is the input grey level, s is the output grey level and L-1 is the maximum value of r

7 Log Transformation s = c log(1+r) c is a constant and r 0. This transformation maps a narrow range of low gray-level input values into a wider range of output levels. USE: Expand values of dark pixels in an image while 3.13 compressing higher level values. Inverse log will do the opposite Power-Law transformations s = cr γ (c and γ are positive constants)



 image of a")
8 Power-law Transformation: Gamma Correction 3.15 Power-Law Transformation for MR Image Enhancement Magnetic Resonance (MR) image of a fractured human spine




9 Power-Law Transformation for Aerial Image Original aerial image has a washed-out appearance, i.e. compression of grey levels is needed Piecewise-Linear Transformations 1. Contrast Stretching a scanning electron microscope image of pollen magnified 700 times

.")


10 Piecewise-Linear Transformations 2. Level slicing an input image result after applying transformation in (a). Applications: enhancing features, e.g. masses of water in satellite imagery 3.19 and enhancing flaws in X-ray images. Piecewise-Linear Transformations, another example 10


11 3. Bit-plane Slicing Piecewise-Linear Transformations Bit-plane Slicing: example 1:


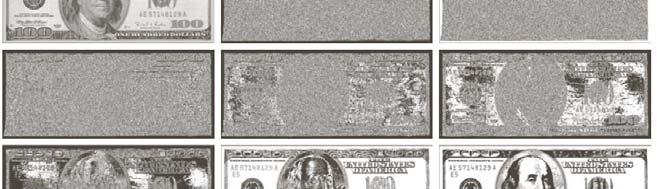
12 Bit-plane Slicing: Example 2: 12


13 Histogram Processing Basic image types: dark light low-contrast high-contrast 3.25 Histogram Processing Histogram processing re-scales an image so that the enhanced image histogram follows some desired form. The modification can take on many forms: histogram equalization, or histogram shaping e.g. exponential or hyperbolic histogram
14 Histogram Equalization To transfer the gray levels so that the histogram of the resulting image is equalized to be a constant: The purpose: to equally use all available gray levels; This figure shows that for any given mapping function between the input and output images, the following holds: i.e., the number of pixels mapped from x to y is unchanged Histogram Equalization To equalize the histogram of the input image, we let p( be a constant. Assume that the gray levels are in the range of 0 and 1 (0<x<1, 0<y<1). Then we have: i.e., the mapping function for histogram equalization is: where is the cumulative probability distribution of the input image, which is monotonically non-decreasing function
15 Histogram Equalization Histogram equalization is based on the following idea: If p(x) is large, y=f(x) has a steep slope, dy will be wide, causing p( to be low; If p(x) is small, y=f(x) has a shallow slope, dy will be narrow, causing p( to be high Histogram Equalization For discrete gray levels, the gray level of the input takes one of the discrete values; and the continuous mapping function: becomes discrete: where Pi is the probability for the gray level of any given pixel to be (0<i<L):
16 Histogram Equalization The resulting function is in the range and it needs to be converted to the gray levels by one of the two following ways: where is the floor, or the integer part of a real number x, and adding 0.5 is for proper rounding. Note that while both conversions map to the highest gray level L - 1, the second conversion also maps to 0 to stretch the gray levels of the output image to occupy the entire dynamic range Histogram Equalization Example: Assume the images have pixels in 8 gray levels. The following table shows the equalization process corresponding to the two conversion methods above: 0/ / / / / / / / / / /7 5/ / / / / /7 7/7 6/ /7 7/7 7/ / / y 1 j=[y (L-1)+0.5], y 2 j=[(y -y min)/(1-y min) (L-1) +0.5],


17 Intensity Transformations and Histogram Equalization 3.33 Histogram Equalization In the following example, the histogram of a given image is equalized. Although h the resulting histogram may not look constant, but the cumulative histogram is a exact linear ramp indicating that the density histogram is indeed equalized. The density histogram is not guaranteed to be a constant because the pixels of the same gray level cannot be separated to satisfy a constant distribution
18 Histogram Equalization Programming Hints: Find histogram of given image: Build lookup table: Image Mapping: 3.35 Histogram Equalization Histogram equalization produces an output image by point re- scaling such that the histogram of the new image is uniform. Assume an image R of size M=NxN. Let # pixels with value rj H R ( j) = M where j=1,2,..., J. H R (j) is just the fractional number of pixels whose amplitude is quantized to reconstruction level r j. We want to produce an enhanced image S whose histogram (normalized) is 1 H S ( i) = i = 1,2,..., K K i.e. a histogram that is as flat as possible
19 Histogram Equalization The scaling algorithm: 1. compute the average value of the histogram. 2. starting at the lowest gray level of the original, combine pixels in the quantization bands until the sum is closest to the average. 3. Rescale all of these pixels to the first reconstruction level at the midpoint of the enhanced image first quantization band. 4. Repeat for higher gray level values Histogram Equalization Remark: 1Hi 1. Histogram equalization i works best on images with ih details hidden in dark regions. 2. Good quality originals are usually degraded when their histograms are equalized. 3. Other histogram modifications are possible, ex. a useful one is called histogram hyperbolization
20 Histogram Equalization 4. However, a normalized image histogram is just an approximation of the image probability density function! Therefore, histogram modification is nothing but modification of the underlying pdf! E.g., in histogram equalization, the enhanced image is desired to have a uniform p.d.f. That is, if p r (r) is the pdf of the original image r, then the pdf p s (s) of the enhanced image s is uniform. This is not a difficult probability problem: Consider a random variable (RV) R with pdf p R (r) and cumulative distribution function (cdf) P R (r). Find a transformation T(.) such that the new RV S=T(R) is uniform, i.e., p S (s) is a uniform density Histogram Equalization Claim: S=T(R)= P R (r) will do it. Proof: r S = PR ( r) = pr ( t) dt 0 Let's find the cdf of S (P S (s)). Stop/Resume P ( s) = Pr ob[ P ( r) s] = Pr ob[ R P S P 1 ( s) R R = 1 pr ( t) dt = PR ( PR ( s)) = s 0 for 0 s 1. 1 R ( s)]
21 Histogram Equalization In discrete case, becomes S = P R ( r) = r 0 p R ( t) dt for k=0,1,...,l-1.,, s k = T ( r ) = k k j= 0 p ( r ) = R j k j= 0 n j n (*) 3.41 Histogram Equalization any transformation such as plotted above can be used as a transformation provided that it is single valued and monotonically increasing, and it takes values in [0,1] for inputs in [0,1]

 = R j k j= 0 n j n (*) 3.")
22 Histogram Equalization 3.43 Histogram Equalization s k = T ( r ) = k k j= 0 p ( r ) = R j k j= 0 n j n (*)


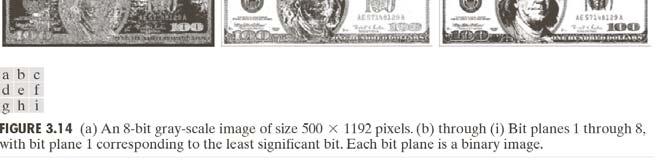
23 3.45 Histogram Equalization Photo of the Mars moon Phobos and its higtogram g
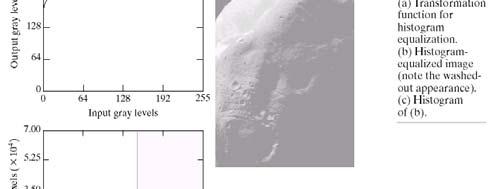
24 Histogram Equalization

25 Localized Histogram Equalization

26 3.51 m S ( x, σ S ( x, ( 1, E) E. f ( x, if ms x, < k0mg and k1σ G < σs( x, < k g( x, = f ( x, otherwise ( 2σG


27 E. f ( x, if ms x, < k0mg and k1σ G < σs( x, < k g( x, = f ( x, otherwise ( 2σG 3.53 Enhancement using logic operations AND OR



28 Enhancement using arithmetic operations 3.55 Note: Fig. 3.14(a) is the original picture in 3rd ed. 28
, they often have suffered from noise and interferences from several sources including: electrical sensor")
29 Enhancement using arithmetic operations 3.57 Enhancement using spatial averaging operations When images are displayed (or printed), they often have suffered from noise and interferences from several sources including: electrical sensor noise, photographic grain noise, and channel errors. These noise effects can usually be removed by simple ad hoc noise-cleaning techniques applied to local neighborhoods of input pixels

![Then, averaging K different noisy images: K 1 g ( x, y ) = g i ( x, y ) K i = 1 produces an output image with 2 1 2 [ g( x, ] =](/docs-images/72/66494101/images/30-1.jpg "f ( x, and σ σ η E g = K 3.")
30 Enhancement using spacial averaging operations Consider a noisy image: g ( x, y ) = f ( x, y ) + η ( x, y ) where the second term is noise which is uncorrelated with the input and has zero mean. Then, averaging K different noisy images: K 1 g ( x, y ) = g i ( x, y ) K i = 1 produces an output image with [ g( x, ] = f ( x, and σ σ η E g = K 3.59 Enhancement using averaging operations original i noisy image, N(0,64 2 ) result of aver 8 noisy images 16 noisy images 64 noisy images 128 noisy images


31 K=8 K=16 K=64 notice how the noise variance is decreasing with increasing K. K= Each pixel u(m,n) is replaced by a weighted average of its neighbourhood pixels
32 Linear Filtering g( x, M N ( m, n ) f ( x + m, y + m = M n= = N M w n ) m= M n= N where g(x, is the output image and f(x, is the input image. In the mask above, M=N=1. N w( m, n) 3.63 Consider again a noisy image: Spacial averaging operations g ( x, y ) = f ( x, y ) +η ( x, y ) in where the second term is noise which is uncorrelated with the input and has zero mean. Let s apply a local averaging filter (all weights are equal) with size K=(2M+1)x(2N+1): 1 1 g( x, g( x, = K ( x, W K produces an output image with = ( x, W f ( x, +η out ( x, σ = 2 out in K σ Therefore, if the input is constant over W, the SNR has improved by a factor of K!!




33 3.65 original 3 x 3 mask 5 x 5 mask 9 x 9 mask 15 x 15 mask 35 x 35 mask

34 Linear Filtering Example Image from the hubble space telescope in orbit around the Earth. Here, we want to blur the image in order to see large objects Q: What happen when important details must be preserved or the noise is non-gaussian? A: may consider a number of techniques: median and order statistics filtering, sharpening spacial filters directional filtering, i unsharp masking hybrid combinations

")
35 Nonlinear Filtering Median or order statistics filters may perform much better in the presence of non-gaussian noise (Nonlinear Signal Processing course!) 3.69 Sharpening Spacial Filters (subtract pixels from right to left) (subtract 1st derivative again from right to left)
36 First Order Derivative Second Order Derivatives Sharpening Spacial Filters First order derivative produces thicker edges has stronger response to grey-level steps Second order derivative has a much stronger response to details produces a double response at step changes in grey level has a stronger response to a line than to a step and to a point than to a line. Conclusion Second derivative is more useful to enhance image details 3.71 Sharpening Spacial Filters: Laplacian Isotropic 2nd order derivative (Laplacian) In digital form: 2 f 2 2 x f f f = x y = f ( x + 1, + f ( x 1, 2 f ( x, in the x-direction and in the y-direction: 2 f 2 y 2-D Laplacian: 2 = f ( x, y + 1) + f ( x, y 1) 2 f ( x, 2 2 f f = 2 2 x 2 f + 2 y this can be implemented using the mask in the next slide
37 isotropic for rotations in increments of 90 * 45 negatives of the above two masks 3.73 Sharpening Spacial Filters: Laplacian Enhancement using Laplacian: 2 f ( x, g( x, = 2 f ( x, + f ( x, f ( x, if the mask center coeff is negative if the mask center coeff is positive

 [ f ( x + 1, y ) + f ( x 1, y ) + f ( x, y + 1) + f ( x, y 1)] This operation can be implemented using the mask in the next slide. 3.")
38 image of the north pole of the moon result of filtering with the 45 o mask Laplacian image scaled for display purpose enhanced image 3.75 The previous expression : 2 f ( x, g( x, = 2 f ( x, + Sharpening Spacial Filters: Laplacian f ( x, f ( x, if the mask center coeff is negative if the mask center coeff is positive The above two operations can be combined and thus simplified: g ( x, y ) = 5 f ( x, y ) [ f ( x + 1, y ) + f ( x 1, y ) + f ( x, y + 1) + f ( x, y 1)] This operation can be implemented using the mask in the next slide


39 90 45 SEM image results for the 90 results for the 45 Notice how much sharper it is! 3.77 Laplacian with high-boost filtering gives better results if the original image is darker than desired, see example in next slide

![The gradient is given by: f Gx f = = f x G y y The magnitude of the gradient is given by: f = mag 2 1/ 2 2 2 2 1/ 2 f f ( f ) = [ G ] x + G y = + x](/docs-images/72/66494101/images/40-1.jpg "y note that components of the gradient are linear operators, but the magnitude is not!")
40 b Sharpening Spacial Filters: First Derivative, the Gradient First derivatives are implemented using the magnitude of the gradient. The gradient is given by: f Gx f = = f x G y y The magnitude of the gradient is given by: f = mag 2 1/ / 2 f f ( f ) = [ G ] x + G y = + x y note that components of the gradient are linear operators, but the magnitude is not! Also the partial derivatives are not isotropic, but the magnitude is! The magnitude can be (for implementation reasons) approximated by: f G x + G y
 Gy Gx 3.81 3.")
41 f(x, Roberts cross-gradient operator (2x2) } f z9 z5 + z8 z6 } Sobel operators (3x3) Gy Gx


 x (smoothed Sobel) orig + mask Final result")
42 Combining spatial enhancement methods original Laplacian of orig ginal Single technique may not produce desirable results Must thus devise a strategy for the given application at hand This application: nuclear whole body scan want to detect deseases, e.g. bone infection and tumors original+ Laplacian Strategy: Sobel of orig use Laplacian to highlight details, gradient to enhance edges, grey-level trans. to increase dynamic range 3.83 smoothed Sobel Mask obtained by: (orig + Lap) x (smoothed Sobel) orig + mask Final result power law to orig. + mask

43 Digital Image Processing, 3rd ed. Gonzalez & Woods Chapter 3 Intensity Transformations & Self-study: Section 3.8. Using Fuzzy Techniques for Intensity Transformations and R. C. Gonzalez & R. E. Woods 43
Image Enhancement: Methods. Digital Image Processing. No Explicit definition. Spatial Domain: Frequency Domain:
 Image Enhancement: No Explicit definition Methods Spatial Domain: Linear Nonlinear Frequency Domain: Linear Nonlinear 1 Spatial Domain Process,, g x y T f x y 2 For 1 1 neighborhood: Contrast Enhancement/Stretching/Point
Image Enhancement: No Explicit definition Methods Spatial Domain: Linear Nonlinear Frequency Domain: Linear Nonlinear 1 Spatial Domain Process,, g x y T f x y 2 For 1 1 neighborhood: Contrast Enhancement/Stretching/Point
ECE Digital Image Processing and Introduction to Computer Vision. Outline
 2/9/7 ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 207. Recap Outline 2. Sharpening Filtering Illustration
2/9/7 ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 207. Recap Outline 2. Sharpening Filtering Illustration
Histogram Processing
 Histogram Processing The histogram of a digital image with gray levels in the range [0,L-] is a discrete function h ( r k ) = n k where r k n k = k th gray level = number of pixels in the image having
Histogram Processing The histogram of a digital image with gray levels in the range [0,L-] is a discrete function h ( r k ) = n k where r k n k = k th gray level = number of pixels in the image having
18/10/2017. Image Enhancement in the Spatial Domain: Gray-level transforms. Image Enhancement in the Spatial Domain: Gray-level transforms
 Gray-level transforms Gray-level transforms Generic, possibly nonlinear, pointwise operator (intensity mapping, gray-level transformation): Basic gray-level transformations: Negative: s L 1 r Generic log:
Gray-level transforms Gray-level transforms Generic, possibly nonlinear, pointwise operator (intensity mapping, gray-level transformation): Basic gray-level transformations: Negative: s L 1 r Generic log:
3.8 Combining Spatial Enhancement Methods 137
 3.8 Combining Spatial Enhancement Methods 137 a b FIGURE 3.45 Optical image of contact lens (note defects on the boundary at 4 and 5 o clock). (b) Sobel gradient. (Original image courtesy of Mr. Pete Sites,
3.8 Combining Spatial Enhancement Methods 137 a b FIGURE 3.45 Optical image of contact lens (note defects on the boundary at 4 and 5 o clock). (b) Sobel gradient. (Original image courtesy of Mr. Pete Sites,
Local Enhancement. Local enhancement
 Local Enhancement Local Enhancement Median filtering (see notes/slides, 3.5.2) HW4 due next Wednesday Required Reading: Sections 3.3, 3.4, 3.5, 3.6, 3.7 Local Enhancement 1 Local enhancement Sometimes
Local Enhancement Local Enhancement Median filtering (see notes/slides, 3.5.2) HW4 due next Wednesday Required Reading: Sections 3.3, 3.4, 3.5, 3.6, 3.7 Local Enhancement 1 Local enhancement Sometimes
Computer Vision & Digital Image Processing
 Computer Vision & Digital Image Processing Image Restoration and Reconstruction I Dr. D. J. Jackson Lecture 11-1 Image restoration Restoration is an objective process that attempts to recover an image
Computer Vision & Digital Image Processing Image Restoration and Reconstruction I Dr. D. J. Jackson Lecture 11-1 Image restoration Restoration is an objective process that attempts to recover an image
Local enhancement. Local Enhancement. Local histogram equalized. Histogram equalized. Local Contrast Enhancement. Fig 3.23: Another example
 Local enhancement Local Enhancement Median filtering Local Enhancement Sometimes Local Enhancement is Preferred. Malab: BlkProc operation for block processing. Left: original tire image. 0/07/00 Local
Local enhancement Local Enhancement Median filtering Local Enhancement Sometimes Local Enhancement is Preferred. Malab: BlkProc operation for block processing. Left: original tire image. 0/07/00 Local
Image Processing. Waleed A. Yousef Faculty of Computers and Information, Helwan University. April 3, 2010
 Image Processing Waleed A. Yousef Faculty of Computers and Information, Helwan University. April 3, 2010 Ch3. Image Enhancement in the Spatial Domain Note that T (m) = 0.5 E. The general law of contrast
Image Processing Waleed A. Yousef Faculty of Computers and Information, Helwan University. April 3, 2010 Ch3. Image Enhancement in the Spatial Domain Note that T (m) = 0.5 E. The general law of contrast
Digital Image Processing. Lecture 6 (Enhancement) Bu-Ali Sina University Computer Engineering Dep. Fall 2009
 Bu-Ali Sina University Computer Engineering Dep. Fall 2009") Digital Image Processing Lecture 6 (Enhancement) Bu-Ali Sina University Computer Engineering Dep. Fall 009 Outline Image Enhancement in Spatial Domain Spatial Filtering Smoothing Filters Median Filter
Digital Image Processing Lecture 6 (Enhancement) Bu-Ali Sina University Computer Engineering Dep. Fall 009 Outline Image Enhancement in Spatial Domain Spatial Filtering Smoothing Filters Median Filter
Introduction to Computer Vision. 2D Linear Systems
 Introduction to Computer Vision D Linear Systems Review: Linear Systems We define a system as a unit that converts an input function into an output function Independent variable System operator or Transfer
Introduction to Computer Vision D Linear Systems Review: Linear Systems We define a system as a unit that converts an input function into an output function Independent variable System operator or Transfer
Review Smoothing Spatial Filters Sharpening Spatial Filters. Spatial Filtering. Dr. Praveen Sankaran. Department of ECE NIT Calicut.
 Spatial Filtering Dr. Praveen Sankaran Department of ECE NIT Calicut January 7, 203 Outline 2 Linear Nonlinear 3 Spatial Domain Refers to the image plane itself. Direct manipulation of image pixels. Figure:
Spatial Filtering Dr. Praveen Sankaran Department of ECE NIT Calicut January 7, 203 Outline 2 Linear Nonlinear 3 Spatial Domain Refers to the image plane itself. Direct manipulation of image pixels. Figure:
Image Processing. Transforms. Mylène Christine Queiroz de Farias
 Image Processing Transforms Mylène Christine Queiroz de Farias Departamento de Engenharia Elétrica Universidade de Brasília (UnB) Brasília, DF 70910-900 mylene@unb.br 13 de Março de 2017 Class 03: Chapter
Image Processing Transforms Mylène Christine Queiroz de Farias Departamento de Engenharia Elétrica Universidade de Brasília (UnB) Brasília, DF 70910-900 mylene@unb.br 13 de Março de 2017 Class 03: Chapter
Fourier Transforms 1D
 Fourier Transforms 1D 3D Image Processing Alireza Ghane 1 Overview Recap Intuitions Function representations shift-invariant spaces linear, time-invariant (LTI) systems complex numbers Fourier Transforms
Fourier Transforms 1D 3D Image Processing Alireza Ghane 1 Overview Recap Intuitions Function representations shift-invariant spaces linear, time-invariant (LTI) systems complex numbers Fourier Transforms
Lecture 7: Edge Detection
 #1 Lecture 7: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Definition of an Edge First Order Derivative Approximation as Edge Detector #2 This Lecture Examples of Edge Detection
#1 Lecture 7: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Definition of an Edge First Order Derivative Approximation as Edge Detector #2 This Lecture Examples of Edge Detection
Empirical Mean and Variance!
 Global Image Properties! Global image properties refer to an image as a whole rather than components. Computation of global image properties is often required for image enhancement, preceding image analysis.!
Global Image Properties! Global image properties refer to an image as a whole rather than components. Computation of global image properties is often required for image enhancement, preceding image analysis.!
Basics on 2-D 2 D Random Signal
 Basics on -D D Random Signal Spring 06 Instructor: K. J. Ray Liu ECE Department, Univ. of Maryland, College Park Overview Last Time: Fourier Analysis for -D signals Image enhancement via spatial filtering
Basics on -D D Random Signal Spring 06 Instructor: K. J. Ray Liu ECE Department, Univ. of Maryland, College Park Overview Last Time: Fourier Analysis for -D signals Image enhancement via spatial filtering
IMAGE ENHANCEMENT II (CONVOLUTION)
") MOTIVATION Recorded images often exhibit problems such as: blurry noisy Image enhancement aims to improve visual quality Cosmetic processing Usually empirical techniques, with ad hoc parameters ( whatever
MOTIVATION Recorded images often exhibit problems such as: blurry noisy Image enhancement aims to improve visual quality Cosmetic processing Usually empirical techniques, with ad hoc parameters ( whatever
Image Enhancement (Spatial Filtering 2)
") Image Enhancement (Spatial Filtering ) Dr. Samir H. Abdul-Jauwad Electrical Engineering Department College o Engineering Sciences King Fahd University o Petroleum & Minerals Dhahran Saudi Arabia samara@kupm.edu.sa
Image Enhancement (Spatial Filtering ) Dr. Samir H. Abdul-Jauwad Electrical Engineering Department College o Engineering Sciences King Fahd University o Petroleum & Minerals Dhahran Saudi Arabia samara@kupm.edu.sa
Laplacian Filters. Sobel Filters. Laplacian Filters. Laplacian Filters. Laplacian Filters. Laplacian Filters
 Sobel Filters Note that smoothing the image before applying a Sobel filter typically gives better results. Even thresholding the Sobel filtered image cannot usually create precise, i.e., -pixel wide, edges.
Sobel Filters Note that smoothing the image before applying a Sobel filter typically gives better results. Even thresholding the Sobel filtered image cannot usually create precise, i.e., -pixel wide, edges.
Biomedical Image Analysis. Segmentation by Thresholding
 Biomedical Image Analysis Segmentation by Thresholding Contents: Thresholding principles Ridler & Calvard s method Ridler TW, Calvard S (1978). Picture thresholding using an iterative selection method,
Biomedical Image Analysis Segmentation by Thresholding Contents: Thresholding principles Ridler & Calvard s method Ridler TW, Calvard S (1978). Picture thresholding using an iterative selection method,
Image Segmentation: Definition Importance. Digital Image Processing, 2nd ed. Chapter 10 Image Segmentation.
 : Definition Importance Detection of Discontinuities: 9 R = wi z i= 1 i Point Detection: 1. A Mask 2. Thresholding R T Line Detection: A Suitable Mask in desired direction Thresholding Line i : R R, j
: Definition Importance Detection of Discontinuities: 9 R = wi z i= 1 i Point Detection: 1. A Mask 2. Thresholding R T Line Detection: A Suitable Mask in desired direction Thresholding Line i : R R, j
Spatial Enhancement Region operations: k'(x,y) = F( k(x-m, y-n), k(x,y), k(x+m,y+n) ]
![Spatial Enhancement Region operations: k'(x,y) = F( k(x-m, y-n), k(x,y), k(x+m,y+n) ]](/thumbs/77/75889528.jpg "Spatial Enhancement Region operations: k'(x,y) = F( k(x-m, y-n), k(x,y), k(x+m,y+n) ]") CEE 615: Digital Image Processing Spatial Enhancements 1 Spatial Enhancement Region operations: k'(x,y) = F( k(x-m, y-n), k(x,y), k(x+m,y+n) ] Template (Windowing) Operations Template (window, box, kernel)
CEE 615: Digital Image Processing Spatial Enhancements 1 Spatial Enhancement Region operations: k'(x,y) = F( k(x-m, y-n), k(x,y), k(x+m,y+n) ] Template (Windowing) Operations Template (window, box, kernel)
Digital Image Processing: Sharpening Filtering in Spatial Domain CSC Biomedical Imaging and Analysis Dr. Kazunori Okada
 Homework Exercise Start project coding work according to the project plan Adjust project plans according to my comments (reply ilearn threads) New Exercise: Install VTK & FLTK. Find a simple hello world
Homework Exercise Start project coding work according to the project plan Adjust project plans according to my comments (reply ilearn threads) New Exercise: Install VTK & FLTK. Find a simple hello world
Image Gradients and Gradient Filtering Computer Vision
 Image Gradients and Gradient Filtering 16-385 Computer Vision What is an image edge? Recall that an image is a 2D function f(x) edge edge How would you detect an edge? What kinds of filter would you use?
Image Gradients and Gradient Filtering 16-385 Computer Vision What is an image edge? Recall that an image is a 2D function f(x) edge edge How would you detect an edge? What kinds of filter would you use?
Colorado School of Mines Image and Multidimensional Signal Processing
 Image and Multidimensional Signal Processing Professor William Hoff Department of Electrical Engineering and Computer Science Spatial Filtering Main idea Spatial filtering Define a neighborhood of a pixel
Image and Multidimensional Signal Processing Professor William Hoff Department of Electrical Engineering and Computer Science Spatial Filtering Main idea Spatial filtering Define a neighborhood of a pixel
Edge Detection in Computer Vision Systems
 1 CS332 Visual Processing in Computer and Biological Vision Systems Edge Detection in Computer Vision Systems This handout summarizes much of the material on the detection and description of intensity
1 CS332 Visual Processing in Computer and Biological Vision Systems Edge Detection in Computer Vision Systems This handout summarizes much of the material on the detection and description of intensity
Compression methods: the 1 st generation
 Compression methods: the 1 st generation 1998-2017 Josef Pelikán CGG MFF UK Praha pepca@cgg.mff.cuni.cz http://cgg.mff.cuni.cz/~pepca/ Still1g 2017 Josef Pelikán, http://cgg.mff.cuni.cz/~pepca 1 / 32 Basic
Compression methods: the 1 st generation 1998-2017 Josef Pelikán CGG MFF UK Praha pepca@cgg.mff.cuni.cz http://cgg.mff.cuni.cz/~pepca/ Still1g 2017 Josef Pelikán, http://cgg.mff.cuni.cz/~pepca 1 / 32 Basic
Filtering and Edge Detection
 Filtering and Edge Detection Local Neighborhoods Hard to tell anything from a single pixel Example: you see a reddish pixel. Is this the object s color? Illumination? Noise? The next step in order of complexity
Filtering and Edge Detection Local Neighborhoods Hard to tell anything from a single pixel Example: you see a reddish pixel. Is this the object s color? Illumination? Noise? The next step in order of complexity
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 11 Oct 3 rd, 2017 Pranav Mantini Slides from Dr. Shishir K Shah, and Frank Liu Review: 2D Discrete Fourier Transform If I is an image of size N then Sin
Digital Image Processing COSC 6380/4393 Lecture 11 Oct 3 rd, 2017 Pranav Mantini Slides from Dr. Shishir K Shah, and Frank Liu Review: 2D Discrete Fourier Transform If I is an image of size N then Sin
Reading. 3. Image processing. Pixel movement. Image processing Y R I G Q
 Reading Jain, Kasturi, Schunck, Machine Vision. McGraw-Hill, 1995. Sections 4.-4.4, 4.5(intro), 4.5.5, 4.5.6, 5.1-5.4. 3. Image processing 1 Image processing An image processing operation typically defines
Reading Jain, Kasturi, Schunck, Machine Vision. McGraw-Hill, 1995. Sections 4.-4.4, 4.5(intro), 4.5.5, 4.5.6, 5.1-5.4. 3. Image processing 1 Image processing An image processing operation typically defines
at Some sort of quantization is necessary to represent continuous signals in digital form
 Quantization at Some sort of quantization is necessary to represent continuous signals in digital form x(n 1,n ) x(t 1,tt ) D Sampler Quantizer x q (n 1,nn ) Digitizer (A/D) Quantization is also used for
Quantization at Some sort of quantization is necessary to represent continuous signals in digital form x(n 1,n ) x(t 1,tt ) D Sampler Quantizer x q (n 1,nn ) Digitizer (A/D) Quantization is also used for
Over-enhancement Reduction in Local Histogram Equalization using its Degrees of Freedom. Alireza Avanaki
 Over-enhancement Reduction in Local Histogram Equalization using its Degrees of Freedom Alireza Avanaki ABSTRACT A well-known issue of local (adaptive) histogram equalization (LHE) is over-enhancement
Over-enhancement Reduction in Local Histogram Equalization using its Degrees of Freedom Alireza Avanaki ABSTRACT A well-known issue of local (adaptive) histogram equalization (LHE) is over-enhancement
Image and Multidimensional Signal Processing
 Image and Multidimensional Signal Processing Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ Image Compression 2 Image Compression Goal: Reduce amount
Image and Multidimensional Signal Processing Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ Image Compression 2 Image Compression Goal: Reduce amount
Prof. Mohd Zaid Abdullah Room No:
 EEE 52/4 Advnced Digital Signal and Image Processing Tuesday, 00-300 hrs, Data Com. Lab. Friday, 0800-000 hrs, Data Com. Lab Prof. Mohd Zaid Abdullah Room No: 5 Email: mza@usm.my www.eng.usm.my Electromagnetic
EEE 52/4 Advnced Digital Signal and Image Processing Tuesday, 00-300 hrs, Data Com. Lab. Friday, 0800-000 hrs, Data Com. Lab Prof. Mohd Zaid Abdullah Room No: 5 Email: mza@usm.my www.eng.usm.my Electromagnetic
6 The SVD Applied to Signal and Image Deblurring
 6 The SVD Applied to Signal and Image Deblurring We will discuss the restoration of one-dimensional signals and two-dimensional gray-scale images that have been contaminated by blur and noise. After an
6 The SVD Applied to Signal and Image Deblurring We will discuss the restoration of one-dimensional signals and two-dimensional gray-scale images that have been contaminated by blur and noise. After an
Machine vision. Summary # 4. The mask for Laplacian is given
 1 Machine vision Summary # 4 The mask for Laplacian is given L = 0 1 0 1 4 1 (6) 0 1 0 Another Laplacian mask that gives more importance to the center element is L = 1 1 1 1 8 1 (7) 1 1 1 Note that the
1 Machine vision Summary # 4 The mask for Laplacian is given L = 0 1 0 1 4 1 (6) 0 1 0 Another Laplacian mask that gives more importance to the center element is L = 1 1 1 1 8 1 (7) 1 1 1 Note that the
Image Enhancement in the frequency domain. GZ Chapter 4
 Image Enhancement in the frequency domain GZ Chapter 4 Contents In this lecture we will look at image enhancement in the frequency domain The Fourier series & the Fourier transform Image Processing in
Image Enhancement in the frequency domain GZ Chapter 4 Contents In this lecture we will look at image enhancement in the frequency domain The Fourier series & the Fourier transform Image Processing in
8 The SVD Applied to Signal and Image Deblurring
 8 The SVD Applied to Signal and Image Deblurring We will discuss the restoration of one-dimensional signals and two-dimensional gray-scale images that have been contaminated by blur and noise. After an
8 The SVD Applied to Signal and Image Deblurring We will discuss the restoration of one-dimensional signals and two-dimensional gray-scale images that have been contaminated by blur and noise. After an
Lecture Outline. Basics of Spatial Filtering Smoothing Spatial Filters. Sharpening Spatial Filters
 1 Lecture Outline Basics o Spatial Filtering Smoothing Spatial Filters Averaging ilters Order-Statistics ilters Sharpening Spatial Filters Laplacian ilters High-boost ilters Gradient Masks Combining Spatial
1 Lecture Outline Basics o Spatial Filtering Smoothing Spatial Filters Averaging ilters Order-Statistics ilters Sharpening Spatial Filters Laplacian ilters High-boost ilters Gradient Masks Combining Spatial
CITS 4402 Computer Vision
 CITS 4402 Computer Vision Prof Ajmal Mian Adj/A/Prof Mehdi Ravanbakhsh, CEO at Mapizy (www.mapizy.com) and InFarm (www.infarm.io) Lecture 04 Greyscale Image Analysis Lecture 03 Summary Images as 2-D signals
CITS 4402 Computer Vision Prof Ajmal Mian Adj/A/Prof Mehdi Ravanbakhsh, CEO at Mapizy (www.mapizy.com) and InFarm (www.infarm.io) Lecture 04 Greyscale Image Analysis Lecture 03 Summary Images as 2-D signals
What is Image Deblurring?
 What is Image Deblurring? When we use a camera, we want the recorded image to be a faithful representation of the scene that we see but every image is more or less blurry, depending on the circumstances.
What is Image Deblurring? When we use a camera, we want the recorded image to be a faithful representation of the scene that we see but every image is more or less blurry, depending on the circumstances.
Machine vision, spring 2018 Summary 4
 Machine vision Summary # 4 The mask for Laplacian is given L = 4 (6) Another Laplacian mask that gives more importance to the center element is given by L = 8 (7) Note that the sum of the elements in the
Machine vision Summary # 4 The mask for Laplacian is given L = 4 (6) Another Laplacian mask that gives more importance to the center element is given by L = 8 (7) Note that the sum of the elements in the
Can the sample being transmitted be used to refine its own PDF estimate?
 Can the sample being transmitted be used to refine its own PDF estimate? Dinei A. Florêncio and Patrice Simard Microsoft Research One Microsoft Way, Redmond, WA 98052 {dinei, patrice}@microsoft.com Abstract
Can the sample being transmitted be used to refine its own PDF estimate? Dinei A. Florêncio and Patrice Simard Microsoft Research One Microsoft Way, Redmond, WA 98052 {dinei, patrice}@microsoft.com Abstract
Module 3 LOSSY IMAGE COMPRESSION SYSTEMS. Version 2 ECE IIT, Kharagpur
 Module 3 LOSSY IMAGE COMPRESSION SYSTEMS Lesson 7 Delta Modulation and DPCM Instructional Objectives At the end of this lesson, the students should be able to: 1. Describe a lossy predictive coding scheme.
Module 3 LOSSY IMAGE COMPRESSION SYSTEMS Lesson 7 Delta Modulation and DPCM Instructional Objectives At the end of this lesson, the students should be able to: 1. Describe a lossy predictive coding scheme.
INTERNATIONAL JOURNAL OF ELECTRONICS AND COMMUNICATION ENGINEERING & TECHNOLOGY (IJECET)
") INTERNATIONAL JOURNAL OF ELECTRONICS AND COMMUNICATION ENGINEERING & TECHNOLOGY (IJECET) International Journal of Electronics and Communication Engineering & Technology (IJECET), ISSN 0976 ISSN 0976 6464(Print)
INTERNATIONAL JOURNAL OF ELECTRONICS AND COMMUNICATION ENGINEERING & TECHNOLOGY (IJECET) International Journal of Electronics and Communication Engineering & Technology (IJECET), ISSN 0976 ISSN 0976 6464(Print)
TRACKING and DETECTION in COMPUTER VISION Filtering and edge detection
 Technischen Universität München Winter Semester 0/0 TRACKING and DETECTION in COMPUTER VISION Filtering and edge detection Slobodan Ilić Overview Image formation Convolution Non-liner filtering: Median
Technischen Universität München Winter Semester 0/0 TRACKING and DETECTION in COMPUTER VISION Filtering and edge detection Slobodan Ilić Overview Image formation Convolution Non-liner filtering: Median
8 The SVD Applied to Signal and Image Deblurring
 8 The SVD Applied to Signal and Image Deblurring We will discuss the restoration of one-dimensional signals and two-dimensional gray-scale images that have been contaminated by blur and noise. After an
8 The SVD Applied to Signal and Image Deblurring We will discuss the restoration of one-dimensional signals and two-dimensional gray-scale images that have been contaminated by blur and noise. After an
Noise, Image Reconstruction with Noise!
 Noise, Image Reconstruction with Noise! EE367/CS448I: Computational Imaging and Display! stanford.edu/class/ee367! Lecture 10! Gordon Wetzstein! Stanford University! What s a Pixel?! photon to electron
Noise, Image Reconstruction with Noise! EE367/CS448I: Computational Imaging and Display! stanford.edu/class/ee367! Lecture 10! Gordon Wetzstein! Stanford University! What s a Pixel?! photon to electron
Overview. Analog capturing device (camera, microphone) PCM encoded or raw signal ( wav, bmp, ) A/D CONVERTER. Compressed bit stream (mp3, jpg, )
 PCM encoded or raw signal ( wav, bmp, ) A/D CONVERTER. Compressed bit stream (mp3, jpg, )") Overview Analog capturing device (camera, microphone) Sampling Fine Quantization A/D CONVERTER PCM encoded or raw signal ( wav, bmp, ) Transform Quantizer VLC encoding Compressed bit stream (mp3, jpg,
Overview Analog capturing device (camera, microphone) Sampling Fine Quantization A/D CONVERTER PCM encoded or raw signal ( wav, bmp, ) Transform Quantizer VLC encoding Compressed bit stream (mp3, jpg,
EE5356 Digital Image Processing
 EE5356 Digital Image Processing INSTRUCTOR: Dr KR Rao Spring 007, Final Thursday, 10 April 007 11:00 AM 1:00 PM ( hours) (Room 111 NH) INSTRUCTIONS: 1 Closed books and closed notes All problems carry weights
EE5356 Digital Image Processing INSTRUCTOR: Dr KR Rao Spring 007, Final Thursday, 10 April 007 11:00 AM 1:00 PM ( hours) (Room 111 NH) INSTRUCTIONS: 1 Closed books and closed notes All problems carry weights
ECE Homework Set 2
 1 Solve these problems after Lecture #4: Homework Set 2 1. Two dice are tossed; let X be the sum of the numbers appearing. a. Graph the CDF, FX(x), and the pdf, fx(x). b. Use the CDF to find: Pr(7 X 9).
1 Solve these problems after Lecture #4: Homework Set 2 1. Two dice are tossed; let X be the sum of the numbers appearing. a. Graph the CDF, FX(x), and the pdf, fx(x). b. Use the CDF to find: Pr(7 X 9).
Linear Diffusion. E9 242 STIP- R. Venkatesh Babu IISc
 Linear Diffusion Derivation of Heat equation Consider a 2D hot plate with Initial temperature profile I 0 (x, y) Uniform (isotropic) conduction coefficient c Unit thickness (along z) Problem: What is temperature
Linear Diffusion Derivation of Heat equation Consider a 2D hot plate with Initial temperature profile I 0 (x, y) Uniform (isotropic) conduction coefficient c Unit thickness (along z) Problem: What is temperature
Today s lecture. Local neighbourhood processing. The convolution. Removing uncorrelated noise from an image The Fourier transform
 Cris Luengo TD396 fall 4 cris@cbuuse Today s lecture Local neighbourhood processing smoothing an image sharpening an image The convolution What is it? What is it useful for? How can I compute it? Removing
Cris Luengo TD396 fall 4 cris@cbuuse Today s lecture Local neighbourhood processing smoothing an image sharpening an image The convolution What is it? What is it useful for? How can I compute it? Removing
Statistics for Data Analysis. Niklaus Berger. PSI Practical Course Physics Institute, University of Heidelberg
 Statistics for Data Analysis PSI Practical Course 2014 Niklaus Berger Physics Institute, University of Heidelberg Overview You are going to perform a data analysis: Compare measured distributions to theoretical
Statistics for Data Analysis PSI Practical Course 2014 Niklaus Berger Physics Institute, University of Heidelberg Overview You are going to perform a data analysis: Compare measured distributions to theoretical
Communication Engineering Prof. Surendra Prasad Department of Electrical Engineering Indian Institute of Technology, Delhi
 Communication Engineering Prof. Surendra Prasad Department of Electrical Engineering Indian Institute of Technology, Delhi Lecture - 41 Pulse Code Modulation (PCM) So, if you remember we have been talking
Communication Engineering Prof. Surendra Prasad Department of Electrical Engineering Indian Institute of Technology, Delhi Lecture - 41 Pulse Code Modulation (PCM) So, if you remember we have been talking
Statistical Methods in Particle Physics
 Statistical Methods in Particle Physics Lecture 3 October 29, 2012 Silvia Masciocchi, GSI Darmstadt s.masciocchi@gsi.de Winter Semester 2012 / 13 Outline Reminder: Probability density function Cumulative
Statistical Methods in Particle Physics Lecture 3 October 29, 2012 Silvia Masciocchi, GSI Darmstadt s.masciocchi@gsi.de Winter Semester 2012 / 13 Outline Reminder: Probability density function Cumulative
!P x. !E x. Bad Things Happen to Good Signals Spring 2011 Lecture #6. Signal-to-Noise Ratio (SNR) Definition of Mean, Power, Energy ( ) 2.
 Definition of Mean, Power, Energy ( ) 2.") Bad Things Happen to Good Signals oise, broadly construed, is any change to the signal from its expected value, x[n] h[n], when it arrives at the receiver. We ll look at additive noise and assume the noise
Bad Things Happen to Good Signals oise, broadly construed, is any change to the signal from its expected value, x[n] h[n], when it arrives at the receiver. We ll look at additive noise and assume the noise
ITK Filters. Thresholding Edge Detection Gradients Second Order Derivatives Neighborhood Filters Smoothing Filters Distance Map Image Transforms
 ITK Filters Thresholding Edge Detection Gradients Second Order Derivatives Neighborhood Filters Smoothing Filters Distance Map Image Transforms ITCS 6010:Biomedical Imaging and Visualization 1 ITK Filters:
ITK Filters Thresholding Edge Detection Gradients Second Order Derivatives Neighborhood Filters Smoothing Filters Distance Map Image Transforms ITCS 6010:Biomedical Imaging and Visualization 1 ITK Filters:
Image Degradation Model (Linear/Additive)
") Image Degradation Model (Linear/Additive),,,,,,,, g x y h x y f x y x y G uv H uv F uv N uv 1 Source of noise Image acquisition (digitization) Image transmission Spatial properties of noise Statistical
Image Degradation Model (Linear/Additive),,,,,,,, g x y h x y f x y x y G uv H uv F uv N uv 1 Source of noise Image acquisition (digitization) Image transmission Spatial properties of noise Statistical
Locality function LOC(.) and loss function LOSS (.) and a priori knowledge on images inp
 and loss function LOSS (.) and a priori knowledge on images inp") L. Yaroslavsky. Course 0510.7211 Digital Image Processing: Applications Lecture 12. Nonlinear filters for image restoration and enhancement Local criteria of image quality: AVLOSS( k, l) = AV LOC( m, n;
L. Yaroslavsky. Course 0510.7211 Digital Image Processing: Applications Lecture 12. Nonlinear filters for image restoration and enhancement Local criteria of image quality: AVLOSS( k, l) = AV LOC( m, n;
Edge Detection. Image Processing - Computer Vision
 Image Processing - Lesson 10 Edge Detection Image Processing - Computer Vision Low Level Edge detection masks Gradient Detectors Compass Detectors Second Derivative - Laplace detectors Edge Linking Image
Image Processing - Lesson 10 Edge Detection Image Processing - Computer Vision Low Level Edge detection masks Gradient Detectors Compass Detectors Second Derivative - Laplace detectors Edge Linking Image
Lecture 04 Image Filtering
 Institute of Informatics Institute of Neuroinformatics Lecture 04 Image Filtering Davide Scaramuzza 1 Lab Exercise 2 - Today afternoon Room ETH HG E 1.1 from 13:15 to 15:00 Work description: your first
Institute of Informatics Institute of Neuroinformatics Lecture 04 Image Filtering Davide Scaramuzza 1 Lab Exercise 2 - Today afternoon Room ETH HG E 1.1 from 13:15 to 15:00 Work description: your first
Image Filtering. Slides, adapted from. Steve Seitz and Rick Szeliski, U.Washington
 Image Filtering Slides, adapted from Steve Seitz and Rick Szeliski, U.Washington The power of blur All is Vanity by Charles Allen Gillbert (1873-1929) Harmon LD & JuleszB (1973) The recognition of faces.
Image Filtering Slides, adapted from Steve Seitz and Rick Szeliski, U.Washington The power of blur All is Vanity by Charles Allen Gillbert (1873-1929) Harmon LD & JuleszB (1973) The recognition of faces.
Digital Image Processing Lectures 25 & 26
 Lectures 25 & 26, Professor Department of Electrical and Computer Engineering Colorado State University Spring 2015 Area 4: Image Encoding and Compression Goal: To exploit the redundancies in the image
Lectures 25 & 26, Professor Department of Electrical and Computer Engineering Colorado State University Spring 2015 Area 4: Image Encoding and Compression Goal: To exploit the redundancies in the image
Chapter 4 Image Enhancement in the Frequency Domain
 Chapter 4 Image Enhancement in the Frequency Domain Yinghua He School of Computer Science and Technology Tianjin University Background Introduction to the Fourier Transform and the Frequency Domain Smoothing
Chapter 4 Image Enhancement in the Frequency Domain Yinghua He School of Computer Science and Technology Tianjin University Background Introduction to the Fourier Transform and the Frequency Domain Smoothing
Slide a window along the input arc sequence S. Least-squares estimate. σ 2. σ Estimate 1. Statistically test the difference between θ 1 and θ 2
 Corner Detection 2D Image Features Corners are important two dimensional features. Two dimensional image features are interesting local structures. They include junctions of dierent types Slide 3 They
Corner Detection 2D Image Features Corners are important two dimensional features. Two dimensional image features are interesting local structures. They include junctions of dierent types Slide 3 They
A NO-REFERENCE SHARPNESS METRIC SENSITIVE TO BLUR AND NOISE. Xiang Zhu and Peyman Milanfar
 A NO-REFERENCE SARPNESS METRIC SENSITIVE TO BLUR AND NOISE Xiang Zhu and Peyman Milanfar Electrical Engineering Department University of California at Santa Cruz, CA, 9564 xzhu@soeucscedu ABSTRACT A no-reference
A NO-REFERENCE SARPNESS METRIC SENSITIVE TO BLUR AND NOISE Xiang Zhu and Peyman Milanfar Electrical Engineering Department University of California at Santa Cruz, CA, 9564 xzhu@soeucscedu ABSTRACT A no-reference
Random Signal Transformations and Quantization
 York University Department of Electrical Engineering and Computer Science EECS 4214 Lab #3 Random Signal Transformations and Quantization 1 Purpose In this lab, you will be introduced to transformations
York University Department of Electrical Engineering and Computer Science EECS 4214 Lab #3 Random Signal Transformations and Quantization 1 Purpose In this lab, you will be introduced to transformations
Old painting digital color restoration
 Old painting digital color restoration Michail Pappas Ioannis Pitas Dept. of Informatics, Aristotle University of Thessaloniki GR-54643 Thessaloniki, Greece Abstract Many old paintings suffer from the
Old painting digital color restoration Michail Pappas Ioannis Pitas Dept. of Informatics, Aristotle University of Thessaloniki GR-54643 Thessaloniki, Greece Abstract Many old paintings suffer from the
Random Number Generation. CS1538: Introduction to simulations
 Random Number Generation CS1538: Introduction to simulations Random Numbers Stochastic simulations require random data True random data cannot come from an algorithm We must obtain it from some process
Random Number Generation CS1538: Introduction to simulations Random Numbers Stochastic simulations require random data True random data cannot come from an algorithm We must obtain it from some process
Lecture 5 Channel Coding over Continuous Channels
 Lecture 5 Channel Coding over Continuous Channels I-Hsiang Wang Department of Electrical Engineering National Taiwan University ihwang@ntu.edu.tw November 14, 2014 1 / 34 I-Hsiang Wang NIT Lecture 5 From
Lecture 5 Channel Coding over Continuous Channels I-Hsiang Wang Department of Electrical Engineering National Taiwan University ihwang@ntu.edu.tw November 14, 2014 1 / 34 I-Hsiang Wang NIT Lecture 5 From
Nonlinear Diffusion. 1 Introduction: Motivation for non-standard diffusion
 Nonlinear Diffusion These notes summarize the way I present this material, for my benefit. But everything in here is said in more detail, and better, in Weickert s paper. 1 Introduction: Motivation for
Nonlinear Diffusion These notes summarize the way I present this material, for my benefit. But everything in here is said in more detail, and better, in Weickert s paper. 1 Introduction: Motivation for
p. 6-1 Continuous Random Variables p. 6-2
 Continuous Random Variables Recall: For discrete random variables, only a finite or countably infinite number of possible values with positive probability (>). Often, there is interest in random variables
Continuous Random Variables Recall: For discrete random variables, only a finite or countably infinite number of possible values with positive probability (>). Often, there is interest in random variables
Summary of Lecture 3
 Summary of Lecture 3 Simple histogram based image segmentation and its limitations. the his- Continuous and discrete amplitude random variables properties togram equalizing point function. Images as matrices
Summary of Lecture 3 Simple histogram based image segmentation and its limitations. the his- Continuous and discrete amplitude random variables properties togram equalizing point function. Images as matrices
Towards a more physically based approach to Extreme Value Analysis in the climate system
 N O A A E S R L P H Y S IC A L S C IE N C E S D IV IS IO N C IR E S Towards a more physically based approach to Extreme Value Analysis in the climate system Prashant Sardeshmukh Gil Compo Cecile Penland
N O A A E S R L P H Y S IC A L S C IE N C E S D IV IS IO N C IR E S Towards a more physically based approach to Extreme Value Analysis in the climate system Prashant Sardeshmukh Gil Compo Cecile Penland
ELEG 833. Nonlinear Signal Processing
 Nonlinear Signal Processing ELEG 833 Gonzalo R. Arce Department of Electrical and Computer Engineering University of Delaware arce@ee.udel.edu February 15, 2005 1 INTRODUCTION 1 Introduction Signal processing
Nonlinear Signal Processing ELEG 833 Gonzalo R. Arce Department of Electrical and Computer Engineering University of Delaware arce@ee.udel.edu February 15, 2005 1 INTRODUCTION 1 Introduction Signal processing
Image preprocessing in spatial domain
 Image preprocessing in spatial domain Sharpening, image derivatives, Laplacian, edges Revision: 1.2, dated: May 25, 2007 Tomáš Svoboda Czech Technical University, Faculty of Electrical Engineering Center
Image preprocessing in spatial domain Sharpening, image derivatives, Laplacian, edges Revision: 1.2, dated: May 25, 2007 Tomáš Svoboda Czech Technical University, Faculty of Electrical Engineering Center
Case Studies of Logical Computation on Stochastic Bit Streams
 Case Studies of Logical Computation on Stochastic Bit Streams Peng Li 1, Weikang Qian 2, David J. Lilja 1, Kia Bazargan 1, and Marc D. Riedel 1 1 Electrical and Computer Engineering, University of Minnesota,
Case Studies of Logical Computation on Stochastic Bit Streams Peng Li 1, Weikang Qian 2, David J. Lilja 1, Kia Bazargan 1, and Marc D. Riedel 1 1 Electrical and Computer Engineering, University of Minnesota,
No. of dimensions 1. No. of centers
 Contents 8.6 Course of dimensionality............................ 15 8.7 Computational aspects of linear estimators.................. 15 8.7.1 Diagonalization of circulant andblock-circulant matrices......
Contents 8.6 Course of dimensionality............................ 15 8.7 Computational aspects of linear estimators.................. 15 8.7.1 Diagonalization of circulant andblock-circulant matrices......
Optimum Notch Filtering - I
 Notch Filtering 1 Optimum Notch Filtering - I Methods discussed before: filter too much image information. Optimum: minimizes local variances of the restored image fˆ x First Step: Extract principal freq.
Notch Filtering 1 Optimum Notch Filtering - I Methods discussed before: filter too much image information. Optimum: minimizes local variances of the restored image fˆ x First Step: Extract principal freq.
ECE Information theory Final (Fall 2008)
") ECE 776 - Information theory Final (Fall 2008) Q.1. (1 point) Consider the following bursty transmission scheme for a Gaussian channel with noise power N and average power constraint P (i.e., 1/n X n i=1
ECE 776 - Information theory Final (Fall 2008) Q.1. (1 point) Consider the following bursty transmission scheme for a Gaussian channel with noise power N and average power constraint P (i.e., 1/n X n i=1
Chapter 16. Local Operations
 Chapter 16 Local Operations g[x, y] =O{f[x ± x, y ± y]} In many common image processing operations, the output pixel is a weighted combination of the gray values of pixels in the neighborhood of the input
Chapter 16 Local Operations g[x, y] =O{f[x ± x, y ± y]} In many common image processing operations, the output pixel is a weighted combination of the gray values of pixels in the neighborhood of the input
Gaussian source Assumptions d = (x-y) 2, given D, find lower bound of I(X;Y)
 2, given D, find lower bound of I(X;Y)") Gaussian source Assumptions d = (x-y) 2, given D, find lower bound of I(X;Y) E{(X-Y) 2 } D
Gaussian source Assumptions d = (x-y) 2, given D, find lower bound of I(X;Y) E{(X-Y) 2 } D
Recall the Basics of Hypothesis Testing
 Recall the Basics of Hypothesis Testing The level of significance α, (size of test) is defined as the probability of X falling in w (rejecting H 0 ) when H 0 is true: P(X w H 0 ) = α. H 0 TRUE H 1 TRUE
Recall the Basics of Hypothesis Testing The level of significance α, (size of test) is defined as the probability of X falling in w (rejecting H 0 ) when H 0 is true: P(X w H 0 ) = α. H 0 TRUE H 1 TRUE
Digital Image Processing ERRATA. Wilhelm Burger Mark J. Burge. An algorithmic introduction using Java. Second Edition. Springer
 Wilhelm Burger Mark J. Burge Digital Image Processing An algorithmic introduction using Java Second Edition ERRATA Springer Berlin Heidelberg NewYork Hong Kong London Milano Paris Tokyo 5 Filters K K No
Wilhelm Burger Mark J. Burge Digital Image Processing An algorithmic introduction using Java Second Edition ERRATA Springer Berlin Heidelberg NewYork Hong Kong London Milano Paris Tokyo 5 Filters K K No
From Fourier Series to Analysis of Non-stationary Signals - II
 From Fourier Series to Analysis of Non-stationary Signals - II prof. Miroslav Vlcek October 10, 2017 Contents Signals 1 Signals 2 3 4 Contents Signals 1 Signals 2 3 4 Contents Signals 1 Signals 2 3 4 Contents
From Fourier Series to Analysis of Non-stationary Signals - II prof. Miroslav Vlcek October 10, 2017 Contents Signals 1 Signals 2 3 4 Contents Signals 1 Signals 2 3 4 Contents Signals 1 Signals 2 3 4 Contents
Bell-shaped curves, variance
 November 7, 2017 Pop-in lunch on Wednesday Pop-in lunch tomorrow, November 8, at high noon. Please join our group at the Faculty Club for lunch. Means If X is a random variable with PDF equal to f (x),
November 7, 2017 Pop-in lunch on Wednesday Pop-in lunch tomorrow, November 8, at high noon. Please join our group at the Faculty Club for lunch. Means If X is a random variable with PDF equal to f (x),
ECE472/572 - Lecture 11. Roadmap. Roadmap. Image Compression Fundamentals and Lossless Compression Techniques 11/03/11.
 ECE47/57 - Lecture Image Compression Fundamentals and Lossless Compression Techniques /03/ Roadmap Preprocessing low level Image Enhancement Image Restoration Image Segmentation Image Acquisition Image
ECE47/57 - Lecture Image Compression Fundamentals and Lossless Compression Techniques /03/ Roadmap Preprocessing low level Image Enhancement Image Restoration Image Segmentation Image Acquisition Image
Chapter 3 sections. SKIP: 3.10 Markov Chains. SKIP: pages Chapter 3 - continued
 Chapter 3 sections Chapter 3 - continued 3.1 Random Variables and Discrete Distributions 3.2 Continuous Distributions 3.3 The Cumulative Distribution Function 3.4 Bivariate Distributions 3.5 Marginal Distributions
Chapter 3 sections Chapter 3 - continued 3.1 Random Variables and Discrete Distributions 3.2 Continuous Distributions 3.3 The Cumulative Distribution Function 3.4 Bivariate Distributions 3.5 Marginal Distributions
Image Processing in Astrophysics
 AIM-CEA Saclay, France Image Processing in Astrophysics Sandrine Pires sandrine.pires@cea.fr NDPI 2011 Image Processing : Goals Image processing is used once the image acquisition is done by the telescope
AIM-CEA Saclay, France Image Processing in Astrophysics Sandrine Pires sandrine.pires@cea.fr NDPI 2011 Image Processing : Goals Image processing is used once the image acquisition is done by the telescope
Detection of Cosmic-Ray Hits for Single Spectroscopic CCD Images
 PUBLICATIONS OF THE ASTRONOMICAL SOCIETY OF THE PACIFIC, 12:814 82, 28 June 28. The Astronomical Society of the Pacific. All rights reserved. Printed in U.S.A. Detection of Cosmic-Ray Hits for Single Spectroscopic
PUBLICATIONS OF THE ASTRONOMICAL SOCIETY OF THE PACIFIC, 12:814 82, 28 June 28. The Astronomical Society of the Pacific. All rights reserved. Printed in U.S.A. Detection of Cosmic-Ray Hits for Single Spectroscopic
L. Yaroslavsky. Fundamentals of Digital Image Processing. Course
 L. Yaroslavsky. Fundamentals of Digital Image Processing. Course 0555.330 Lec. 6. Principles of image coding The term image coding or image compression refers to processing image digital data aimed at
L. Yaroslavsky. Fundamentals of Digital Image Processing. Course 0555.330 Lec. 6. Principles of image coding The term image coding or image compression refers to processing image digital data aimed at
CHAPTER 4 PRINCIPAL COMPONENT ANALYSIS-BASED FUSION
 59 CHAPTER 4 PRINCIPAL COMPONENT ANALYSIS-BASED FUSION 4. INTRODUCTION Weighted average-based fusion algorithms are one of the widely used fusion methods for multi-sensor data integration. These methods
59 CHAPTER 4 PRINCIPAL COMPONENT ANALYSIS-BASED FUSION 4. INTRODUCTION Weighted average-based fusion algorithms are one of the widely used fusion methods for multi-sensor data integration. These methods
Multimedia Databases. Previous Lecture. 4.1 Multiresolution Analysis. 4 Shape-based Features. 4.1 Multiresolution Analysis
 Previous Lecture Multimedia Databases Texture-Based Image Retrieval Low Level Features Tamura Measure, Random Field Model High-Level Features Fourier-Transform, Wavelets Wolf-Tilo Balke Silviu Homoceanu
Previous Lecture Multimedia Databases Texture-Based Image Retrieval Low Level Features Tamura Measure, Random Field Model High-Level Features Fourier-Transform, Wavelets Wolf-Tilo Balke Silviu Homoceanu
Multimedia Databases. Wolf-Tilo Balke Philipp Wille Institut für Informationssysteme Technische Universität Braunschweig
 Multimedia Databases Wolf-Tilo Balke Philipp Wille Institut für Informationssysteme Technische Universität Braunschweig http://www.ifis.cs.tu-bs.de 4 Previous Lecture Texture-Based Image Retrieval Low
Multimedia Databases Wolf-Tilo Balke Philipp Wille Institut für Informationssysteme Technische Universität Braunschweig http://www.ifis.cs.tu-bs.de 4 Previous Lecture Texture-Based Image Retrieval Low
Multimedia Databases. 4 Shape-based Features. 4.1 Multiresolution Analysis. 4.1 Multiresolution Analysis. 4.1 Multiresolution Analysis
 4 Shape-based Features Multimedia Databases Wolf-Tilo Balke Silviu Homoceanu Institut für Informationssysteme Technische Universität Braunschweig http://www.ifis.cs.tu-bs.de 4 Multiresolution Analysis
4 Shape-based Features Multimedia Databases Wolf-Tilo Balke Silviu Homoceanu Institut für Informationssysteme Technische Universität Braunschweig http://www.ifis.cs.tu-bs.de 4 Multiresolution Analysis
COMP344 Digital Image Processing Fall 2007 Final Examination
 COMP344 Digital Image Processing Fall 2007 Final Examination Time allowed: 2 hours Name Student ID Email Question 1 Question 2 Question 3 Question 4 Question 5 Question 6 Total With model answer HK University
COMP344 Digital Image Processing Fall 2007 Final Examination Time allowed: 2 hours Name Student ID Email Question 1 Question 2 Question 3 Question 4 Question 5 Question 6 Total With model answer HK University
Single Exposure Enhancement and Reconstruction. Some slides are from: J. Kosecka, Y. Chuang, A. Efros, C. B. Owen, W. Freeman
 Single Exposure Enhancement and Reconstruction Some slides are from: J. Kosecka, Y. Chuang, A. Efros, C. B. Owen, W. Freeman 1 Reconstruction as an Inverse Problem Original image f Distortion & Sampling
Single Exposure Enhancement and Reconstruction Some slides are from: J. Kosecka, Y. Chuang, A. Efros, C. B. Owen, W. Freeman 1 Reconstruction as an Inverse Problem Original image f Distortion & Sampling
Multimedia Networking ECE 599
 Multimedia Networking ECE 599 Prof. Thinh Nguyen School of Electrical Engineering and Computer Science Based on lectures from B. Lee, B. Girod, and A. Mukherjee 1 Outline Digital Signal Representation
Multimedia Networking ECE 599 Prof. Thinh Nguyen School of Electrical Engineering and Computer Science Based on lectures from B. Lee, B. Girod, and A. Mukherjee 1 Outline Digital Signal Representation