Colorado School of Mines Image and Multidimensional Signal Processing
|
|
|
- Everett Johnson
- 5 years ago
- Views:
Transcription

1 Image and Multidimensional Signal Processing Professor William Hoff Department of Electrical Engineering and Computer Science
2 Spatial Filtering
3 Main idea Spatial filtering Define a neighborhood of a pixel Define an operation on pixels in the neighborhood Output pixel value = result of the operation Topics Linear filtering Correlation, convolution Normalized cross correlation Important examples Smoothing filters (box average, Gaussian) Sharpening filters (Laplacian, Sobel) Non-linear filters Order-statistics filters (primarily median filter) 3
4 Linear Spatial Filtering Create a filter or mask w, size m x n Apply to image f, size M x N Compute the sum of products of mask coefficients with corresponding pixels under mask Slide mask over image, apply at each point m/ n/ g( x, y) w( s, t) f ( x s, y t) sm/ tn/ w( x, y) f ( x, y) Also called crosscorrelation It is a linear operation w( x, y) a f ( x, y) a w( x, y) f ( x, y) w( x, y) f ( x, y) g( x, y) w( x, y) f ( x, y) w( x, y) g( x, y) 4
5 / / / / ), ( ), ( ), ( m m s n n t t y s x f t s w y x g 5
6 Example 3x3 averaging ( box ) filters Do manual calculation on a corner f ( x, y) g( x, y) w( x, y) f ( x, y) : : : : : : :.. 6
7 Example 3x3 averaging filters Manual calculation on corner 7
8 Matlab Examples clear all close all % Synthetic image of a white square I = zeros(00,00); I(50:150, 50:150) = 1; imshow(i,[]); % Apply 3x3 box filter w = [ 1 1 1; 1 1 1; 1 1 1]/9; I = imfilter(i, w); imtool(i,[]); fspecial useful to create filters imfilter does cross correlation % Apply 15x15 box filter w = fspecial('average', [15 15]); I3 = imfilter(i, w); imtool(i3,[]); % Show that averaging reduces noise I = I + randn(00,00)*0.5; imshow(i,[]); w = fspecial('average', [5 5]); I4 = imfilter(i, w); figure, imshow(i4,[]); 8
9 Sharpening Spatial Filters First Derivative First derivative f ( x, y) f ( x, y) f ( x, y) lim x 0 In discrete form (can also do central difference) f ( x, y) f ( x 1, y) f ( x, y) f f ( x 1) f ( x 1) / x x As a filter Sobel operators combine smoothing with derivative dx filter dy filter
10 w( x, y) Example f ( x, y) g( x, y) w( x, y) f ( x, y)
11 w( x, y) Example f ( x, y) g( x, y) w( x, y) f ( x, y)
12 Gradient Compute gradient components using first derivative operators f f f x y Gradient magnitude indicates the location of edges in the image f f x f y 1/ Gradient direction shows direction of edge We can use the Sobel operators for df/dx, df/dy 1 f y tan f x 1
13 Matlab example clear all close all I = imread('moon.tif'); imshow(i,[]); % Create Sobel filters hy = [ % can also do hy = fspecial('sobel'); ; 0 0 0; ]; hx = hy'; Ix = imfilter(i, hx); Iy = imfilter(i, hy); figure; subplot(1,,1), imshow(ix,[]); subplot(1,,), imshow(iy,[]); Note - the result is not quite correct We should first convert the input image to type double before applying imfilter (why?) 13
14 Matlab example (continued) % Compute gradient magnitude (note the use of ".") Ig = (Ix.^ + Iy.^).^ 0.5; figure, imshow(ig, []); >> help atan atan Four quadrant inverse tangent. atan(y,x) is the four quadrant arctangent of the real parts of the elements of X and Y. -pi <= atan(y,x) <= pi. See also atan. Reference page in Help browser doc atan % Compute gradient direction Iang = atan(iy,ix); figure, imshow(iang, []); % Only display angles where gradient magnitude is large Mask = (Ig > 100); figure, imshow(double(mask).* Iang, []); colormap jet 14
15 Sharpening Spatial Filters nd derivative Second derivative f x y x x x (, ) f ( x, y) f ( x 1, y) f ( x, y) f ( x 1, y) As a filter Two dimensional the Laplacian As a filter f f f x y x x =
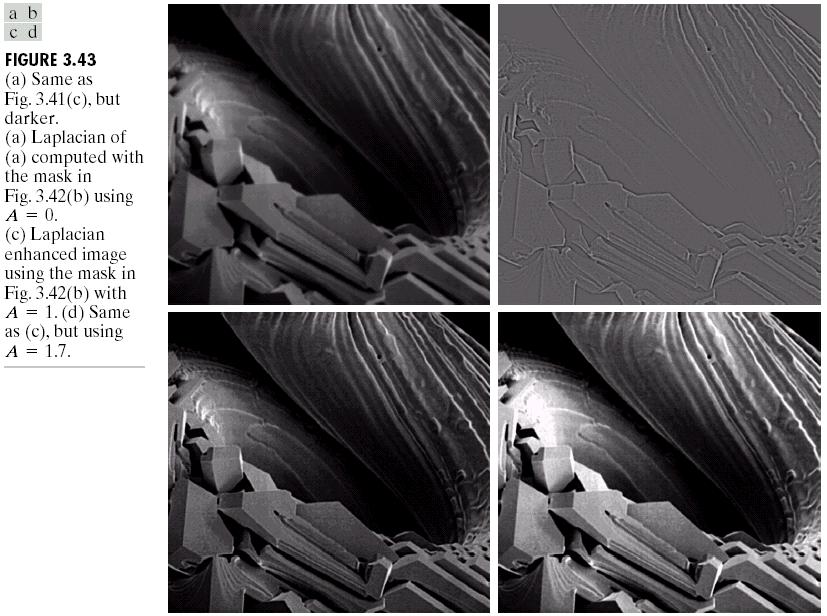
16 High Boost Filtering We combine original image with results of Laplacian result is the original image with enhanced detail g( x, y) f ( x, y) f Also called unsharp masking In general g( x, y) Af ( x, y) f ( x, y) 16
17 17
18 Vector representation of correlation Correlation is a sum of products of corresponding terms We can think of correlation as a dot product of vectors w and f c w f w f w f mn k1 1 1 wf k k m/ n/ c( x, y) w( s, t) f ( x s, y t) sm/ tn/ w( x, y) f ( x, y) T wf mn mn If images w and f are similar, their vectors are aligned 18
 is high where w matches f m/ n/ c( x, y) w( s, t) f ( x s, y t) sm/ tn/ w( x, y) f ( x,")
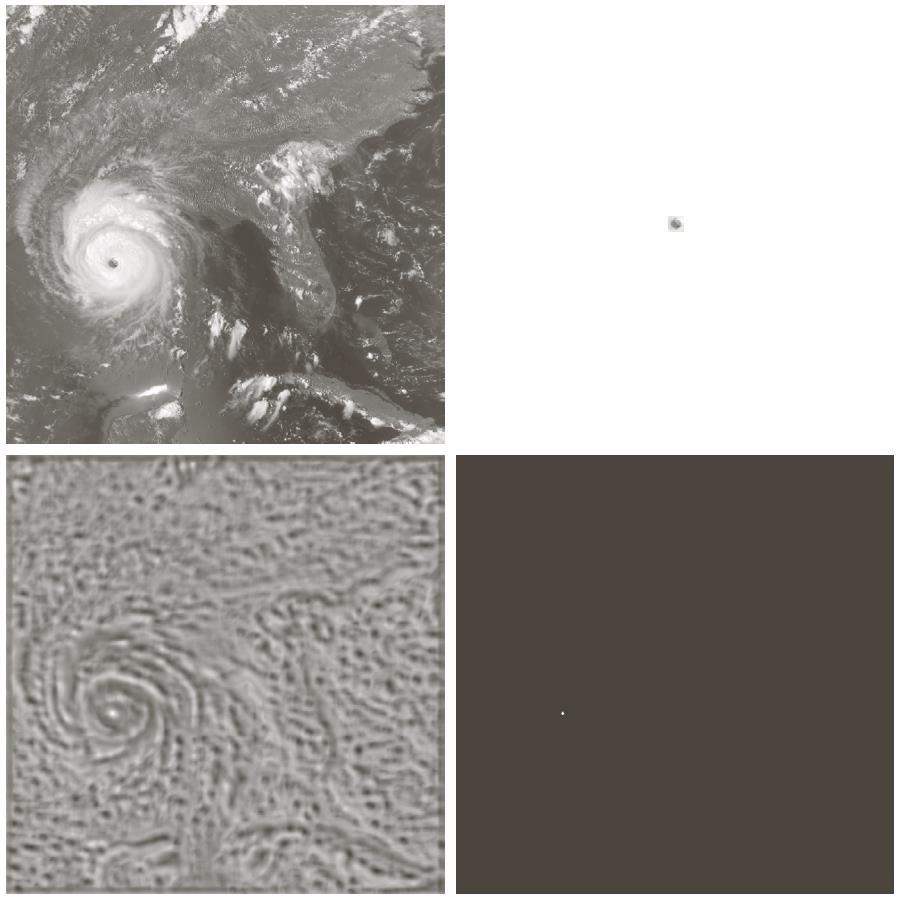
19 Correlation can do matching Let w(x,y) be a template subimage Try to find an instance of w in image f(x,y) The correlation score c(x,y) is high where w matches f m/ n/ c( x, y) w( s, t) f ( x s, y t) sm/ tn/ w( x, y) f ( x, y) 19
20 0
21 Template Matching (continued) Since f is not constant everywhere, we need to normalize c wf T w f where w w 1 w w 3 w N The result is between 0..1 (for positive valued images) We can get better precision by subtracting off means c( x, y) st, s, t s, t This result is between [ w( s, t) w][ f ( x s, y t) f ] [ w( s, t) w] [ f ( x s, y t) f ] 1/ This is the normalized correlation coefficient 1
22 Normalized Cross-correlation Normalized cross-correlation (values range from ) c( x, y) where st, s, t s, t w(s,t) is a subimage, size mxn f(x,y) is a large image, size MxN sums are taken over s=1..m, t=1..n [ w( s, t) w][ f ( x s, y t) f ( x, y)] [ w( s, t) w] [ f ( x s, y t) f ( x, y)] f ( x, y) is the local mean of f, in a mxn neighborhood around (x,y) 1/ 1 f ( x, y) f ( x s, y t) mn st, See pg. 870 in the Gonzalez & Woods textbook w(s,t) Size mxn f(x,y) c(x,y) Correlation scores Size MxN Size MxN
; T = imcrop(i1, [66, 13, 86, 33]); I = imread('test01.")

23 Matlab Example Crop a small subimage from left image, find its match in the right image I1 = imread('test000.jpg'); T = imcrop(i1, [66, 13, 86, 33]); I = imread('test01.jpg'); C = normxcorr(t, I); % The scores are in an image that is slightly bigger than the original % image... it is expanded by half the size of the template in all % directions. So we will crop out the center portion. Csub = imcrop(c, [(size(t,)-1)/+1 (size(t,1)-1)/+1 size(i,)-1 size(i,1)-1]); cmax = max(csub(:)); [y x] = find(csub==cmax); 3
24 Doing cross correlation in Matlab without normxcorr The easiest way is to implement the equation directly, using for loops You scan through the image... at every pixel (x,y): Extract the subimage fs(x,y) from the image f surrounding x,y Subtract off the local image mean value at (x,y) Compute the sum of the product of (fs-fmean) and (w-mean(w); this is the numerator The denominator can be similarly computed Dividing the two gives you the value of the normalized cross correlation at pixel (x,y) in the ouput Note - there are faster ways to do this, using Matlab s ability to operate on whole matrices 4
25 Doing cross correlation in Matlab without normxcorr (continued) Numerator where N [ w( s, t) w][ f ( x s, y t) f ( x, y)] st, w is the mean of all pixels in w; it can be computed once. It is a scalar. f ( x, y) is the local mean of pixels in f, in a mxn window centered at (x,y). This can be represented as an image of size MxN. Then st, [ w( s, t) w][ f ( x s, y t) f ( x, y)] [ w( s, t) w] f ( x s, y t) f ( x, y) [ w( s, t) w] s, t s, t The first term is the correlation of (w-wmean) and f. The second term is zero because [ w( s, t) w] w( s, t) w mnw mnw 0 So in Matlab: N = imfilter(f,w-mean(w)); s, t s, t s, t 5
26 Doing cross correlation in Matlab without normxcorr (continued) Denominator D [ w( s, t) w] [ f ( x s, y t) f ( x, y)] s, t s, t In Matlab, you can compute fmean at every pixel by filtering with a mxn rectangle of 1 s (and dividing by mxn): [m n] = size(w); fmean = imfilter(f, ones(m,n))/(m*n); The first term is a scalar, and can be computed once. We rewrite the second term: st, [ f ( x s, y t) f ( x, y)] f ( x s, y t) f ( x, y) f ( x s, y t) f ( x, y) s, t s, t s, t f ( x s, y t) ( mn) f ( x, y) ( mn) f ( x, y) st, f ( x s, y t) ( mn) f ( x, y) st, 1/ This can be computed by filtering again with a mxn rectangle of 1 s; i.e., imfilter(f.^, ones(m,n)) 6
27 Correlation and Convolution Correlation m/ n/ g( x, y) w( s, t) f ( x s, y t) sm/ tn/ w( x, y) f ( x, y) Convolution m/ n/ g( x, y) w( s, t) f ( x s, y t) sm/ tn/ w( x, y) f ( x, y) Note that Convolution is very similar to correlation, except that we flip one of the functions Also a linear operation m/ n/ m/ n/ w( s, t) f ( x s, y t) w( s, t) f ( x s, y t) sm/ tn/ sm/ tn/ So to implement convolution we can reflect w(x,y) and then do correlation 7
28 1D Examples Figure 3.9 8
29 1D Examples 9
30 D Examples 30
31 D Examples 31
32 Properties Convolution is Commutative f * g = g * f Associative f * (g * h) = (f * g) * h Distributive f * (g + h) = f * g + f * h Correlation is distributive but not commutative or associative Convolution of a filter h(x,y) with an impulse d(x,y) yields h(x,y) 3
 1 x e 0.")
33 Gaussian an important smoothing filter 1D Notes: h( x) 1 x e is the standard deviation Values should sum to 1 Mask size should be at least ±3 D x y 1 h( x, y) e
34 Convolving with two Gaussians You can convolve a function with a Gaussian, then convolve again with a Gaussian. The effect is the same as convolving with a single, larger Gaussian Why? Since convolution is associative g g f g g f 1 1 and if then x x 1 1 1, 1 g e g e 1 1 g1g e 1 x 1 i.e., it is a Gaussian with standard deviation new 1 34
35 Proof You can prove this from the definition of convolution f g f ( t) g( t x) dt And use the idea that t x t x/ e e e e e t t txx x / where the last term does not depend on t and the first one is just another Gaussian, but centered around a different point. 35
36 Interesting fact If you repeatedly convolve an image N times with any filter, the effect (for large N) is that of convolving with a Gaussian This comes from the Central Limit Theorem: The sum of N mutually independent random variables with zero means and finite variances tends toward the normal probability distribution And the fact that the pdf of the sum of two independent random variables is the convolution of their pdf s
37 Separable kernels (filter masks) If a D correlation (or convolution) kernel can be separated into two 1D kernels, the operation is much faster If then h ( x, y) h1 ( x) h ( y) h( x, y) f ( x, y) h ( x) h ( y) f ( x, y) 1 Namely, do a 1D correlation with h (y) along the individual columns of the input image, then do a 1D correlation with h 1 (x) along the rows of the result from the previous step If h(x,y) is nxn, and f(x,y) is NxN Cost of a D correlation? Cost of two 1D correlations? 37
38 Separable kernels (filter masks) If a D correlation (or convolution) kernel can be separated into two 1D kernels, the operation is much faster If then h( x, y) h1 ( x) h ( y) h( x, y) f ( x, y) h ( x) h ( y) f ( x, y) 1 Prove this (HW) Namely, do a 1D correlation with h (y) along the individual columns of the input image, then do a 1D correlation with h 1 (x) along the rows of the result from the previous step If h(x,y) is nxn, and f(x,y) is NxN Cost of a D correlation? Cost of two 1D correlations? 38
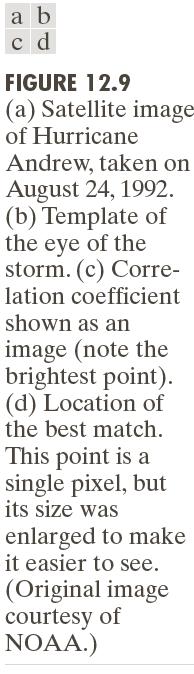
39 Nonlinear Filters Median filter - a non-linear smoothing filter Steps: Order (sort) pixel values within neighborhood Replace center with some value based on the ordering (i.e., median) Advantages Especially good for reducing impulse, or shot-and-pepper noise Doesn t blur sharp edges in the image 1 1 Matlab functions medfilt1, medfilt, ordfilt D noisy step edge median filtered, filter width=7 39
40 Example on ramp edge f( x) x x 1: 4,6 :10 0 x
41 Example on ramp edge f( x) x x 1: 4,6 :10 0 x
42 4
43 Read image eight.tif Add noise: imnoise Examples - Matlab Compare imfilter, medfilt clear all close all I = imread('eight.tif'); imshow(i,[]); Inoisy = imnoise(i, 'salt & pepper', 0.05); imtool(inoisy,[]); I1 = imfilter(inoisy, fspecial('average')); imshow(i1, []); I = medfilt(inoisy); imshow(i, []); 43
44 Summary A spatial filter operates on a neighborhood of a pixel. The output pixel value is the result of the operation. A linear spatial filter performs a sum of products of the neighborhood values with the corresponding filter values. The median filter is an example of a non-linear filter. Filters can be used for smoothing and sharpening. 44
45 Questions Is the D Gaussian filter separable? Why or why not? What is the difference between convolution and correlation? Why might the median filter be preferable for some situations? 45
Review Smoothing Spatial Filters Sharpening Spatial Filters. Spatial Filtering. Dr. Praveen Sankaran. Department of ECE NIT Calicut.
 Spatial Filtering Dr. Praveen Sankaran Department of ECE NIT Calicut January 7, 203 Outline 2 Linear Nonlinear 3 Spatial Domain Refers to the image plane itself. Direct manipulation of image pixels. Figure:
Spatial Filtering Dr. Praveen Sankaran Department of ECE NIT Calicut January 7, 203 Outline 2 Linear Nonlinear 3 Spatial Domain Refers to the image plane itself. Direct manipulation of image pixels. Figure:
Image Enhancement: Methods. Digital Image Processing. No Explicit definition. Spatial Domain: Frequency Domain:
 Image Enhancement: No Explicit definition Methods Spatial Domain: Linear Nonlinear Frequency Domain: Linear Nonlinear 1 Spatial Domain Process,, g x y T f x y 2 For 1 1 neighborhood: Contrast Enhancement/Stretching/Point
Image Enhancement: No Explicit definition Methods Spatial Domain: Linear Nonlinear Frequency Domain: Linear Nonlinear 1 Spatial Domain Process,, g x y T f x y 2 For 1 1 neighborhood: Contrast Enhancement/Stretching/Point
Lecture 04 Image Filtering
 Institute of Informatics Institute of Neuroinformatics Lecture 04 Image Filtering Davide Scaramuzza 1 Lab Exercise 2 - Today afternoon Room ETH HG E 1.1 from 13:15 to 15:00 Work description: your first
Institute of Informatics Institute of Neuroinformatics Lecture 04 Image Filtering Davide Scaramuzza 1 Lab Exercise 2 - Today afternoon Room ETH HG E 1.1 from 13:15 to 15:00 Work description: your first
Computer Vision Lecture 3
 Computer Vision Lecture 3 Linear Filters 03.11.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Demo Haribo Classification Code available on the class website...
Computer Vision Lecture 3 Linear Filters 03.11.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Demo Haribo Classification Code available on the class website...
Local Enhancement. Local enhancement
 Local Enhancement Local Enhancement Median filtering (see notes/slides, 3.5.2) HW4 due next Wednesday Required Reading: Sections 3.3, 3.4, 3.5, 3.6, 3.7 Local Enhancement 1 Local enhancement Sometimes
Local Enhancement Local Enhancement Median filtering (see notes/slides, 3.5.2) HW4 due next Wednesday Required Reading: Sections 3.3, 3.4, 3.5, 3.6, 3.7 Local Enhancement 1 Local enhancement Sometimes
Local enhancement. Local Enhancement. Local histogram equalized. Histogram equalized. Local Contrast Enhancement. Fig 3.23: Another example
 Local enhancement Local Enhancement Median filtering Local Enhancement Sometimes Local Enhancement is Preferred. Malab: BlkProc operation for block processing. Left: original tire image. 0/07/00 Local
Local enhancement Local Enhancement Median filtering Local Enhancement Sometimes Local Enhancement is Preferred. Malab: BlkProc operation for block processing. Left: original tire image. 0/07/00 Local
Taking derivative by convolution
 Taking derivative by convolution Partial derivatives with convolution For 2D function f(x,y), the partial derivative is: For discrete data, we can approximate using finite differences: To implement above
Taking derivative by convolution Partial derivatives with convolution For 2D function f(x,y), the partial derivative is: For discrete data, we can approximate using finite differences: To implement above
ECE Digital Image Processing and Introduction to Computer Vision. Outline
 2/9/7 ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 207. Recap Outline 2. Sharpening Filtering Illustration
2/9/7 ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 207. Recap Outline 2. Sharpening Filtering Illustration
Gaussian derivatives
 Gaussian derivatives UCU Winter School 2017 James Pritts Czech Tecnical University January 16, 2017 1 Images taken from Noah Snavely s and Robert Collins s course notes Definition An image (grayscale)
Gaussian derivatives UCU Winter School 2017 James Pritts Czech Tecnical University January 16, 2017 1 Images taken from Noah Snavely s and Robert Collins s course notes Definition An image (grayscale)
Histogram Processing
 Histogram Processing The histogram of a digital image with gray levels in the range [0,L-] is a discrete function h ( r k ) = n k where r k n k = k th gray level = number of pixels in the image having
Histogram Processing The histogram of a digital image with gray levels in the range [0,L-] is a discrete function h ( r k ) = n k where r k n k = k th gray level = number of pixels in the image having
Computational Photography
 Computational Photography Si Lu Spring 208 http://web.cecs.pdx.edu/~lusi/cs50/cs50_computati onal_photography.htm 04/0/208 Last Time o Digital Camera History of Camera Controlling Camera o Photography
Computational Photography Si Lu Spring 208 http://web.cecs.pdx.edu/~lusi/cs50/cs50_computati onal_photography.htm 04/0/208 Last Time o Digital Camera History of Camera Controlling Camera o Photography
Machine vision, spring 2018 Summary 4
 Machine vision Summary # 4 The mask for Laplacian is given L = 4 (6) Another Laplacian mask that gives more importance to the center element is given by L = 8 (7) Note that the sum of the elements in the
Machine vision Summary # 4 The mask for Laplacian is given L = 4 (6) Another Laplacian mask that gives more importance to the center element is given by L = 8 (7) Note that the sum of the elements in the
Edge Detection. Introduction to Computer Vision. Useful Mathematics Funcs. The bad news
 Edge Detection Introduction to Computer Vision CS / ECE 8B Thursday, April, 004 Edge detection (HO #5) Edge detection is a local area operator that seeks to find significant, meaningful changes in image
Edge Detection Introduction to Computer Vision CS / ECE 8B Thursday, April, 004 Edge detection (HO #5) Edge detection is a local area operator that seeks to find significant, meaningful changes in image
CITS 4402 Computer Vision
 CITS 4402 Computer Vision Prof Ajmal Mian Adj/A/Prof Mehdi Ravanbakhsh, CEO at Mapizy (www.mapizy.com) and InFarm (www.infarm.io) Lecture 04 Greyscale Image Analysis Lecture 03 Summary Images as 2-D signals
CITS 4402 Computer Vision Prof Ajmal Mian Adj/A/Prof Mehdi Ravanbakhsh, CEO at Mapizy (www.mapizy.com) and InFarm (www.infarm.io) Lecture 04 Greyscale Image Analysis Lecture 03 Summary Images as 2-D signals
Today s lecture. Local neighbourhood processing. The convolution. Removing uncorrelated noise from an image The Fourier transform
 Cris Luengo TD396 fall 4 cris@cbuuse Today s lecture Local neighbourhood processing smoothing an image sharpening an image The convolution What is it? What is it useful for? How can I compute it? Removing
Cris Luengo TD396 fall 4 cris@cbuuse Today s lecture Local neighbourhood processing smoothing an image sharpening an image The convolution What is it? What is it useful for? How can I compute it? Removing
Machine vision. Summary # 4. The mask for Laplacian is given
 1 Machine vision Summary # 4 The mask for Laplacian is given L = 0 1 0 1 4 1 (6) 0 1 0 Another Laplacian mask that gives more importance to the center element is L = 1 1 1 1 8 1 (7) 1 1 1 Note that the
1 Machine vision Summary # 4 The mask for Laplacian is given L = 0 1 0 1 4 1 (6) 0 1 0 Another Laplacian mask that gives more importance to the center element is L = 1 1 1 1 8 1 (7) 1 1 1 Note that the
Introduction to Computer Vision. 2D Linear Systems
 Introduction to Computer Vision D Linear Systems Review: Linear Systems We define a system as a unit that converts an input function into an output function Independent variable System operator or Transfer
Introduction to Computer Vision D Linear Systems Review: Linear Systems We define a system as a unit that converts an input function into an output function Independent variable System operator or Transfer
Reading. 3. Image processing. Pixel movement. Image processing Y R I G Q
 Reading Jain, Kasturi, Schunck, Machine Vision. McGraw-Hill, 1995. Sections 4.-4.4, 4.5(intro), 4.5.5, 4.5.6, 5.1-5.4. 3. Image processing 1 Image processing An image processing operation typically defines
Reading Jain, Kasturi, Schunck, Machine Vision. McGraw-Hill, 1995. Sections 4.-4.4, 4.5(intro), 4.5.5, 4.5.6, 5.1-5.4. 3. Image processing 1 Image processing An image processing operation typically defines
Digital Image Processing. Lecture 6 (Enhancement) Bu-Ali Sina University Computer Engineering Dep. Fall 2009
 Bu-Ali Sina University Computer Engineering Dep. Fall 2009") Digital Image Processing Lecture 6 (Enhancement) Bu-Ali Sina University Computer Engineering Dep. Fall 009 Outline Image Enhancement in Spatial Domain Spatial Filtering Smoothing Filters Median Filter
Digital Image Processing Lecture 6 (Enhancement) Bu-Ali Sina University Computer Engineering Dep. Fall 009 Outline Image Enhancement in Spatial Domain Spatial Filtering Smoothing Filters Median Filter
Lecture Outline. Basics of Spatial Filtering Smoothing Spatial Filters. Sharpening Spatial Filters
 1 Lecture Outline Basics o Spatial Filtering Smoothing Spatial Filters Averaging ilters Order-Statistics ilters Sharpening Spatial Filters Laplacian ilters High-boost ilters Gradient Masks Combining Spatial
1 Lecture Outline Basics o Spatial Filtering Smoothing Spatial Filters Averaging ilters Order-Statistics ilters Sharpening Spatial Filters Laplacian ilters High-boost ilters Gradient Masks Combining Spatial
Edges and Scale. Image Features. Detecting edges. Origin of Edges. Solution: smooth first. Effects of noise
 Edges and Scale Image Features From Sandlot Science Slides revised from S. Seitz, R. Szeliski, S. Lazebnik, etc. Origin of Edges surface normal discontinuity depth discontinuity surface color discontinuity
Edges and Scale Image Features From Sandlot Science Slides revised from S. Seitz, R. Szeliski, S. Lazebnik, etc. Origin of Edges surface normal discontinuity depth discontinuity surface color discontinuity
Announcements. Filtering. Image Filtering. Linear Filters. Example: Smoothing by Averaging. Homework 2 is due Apr 26, 11:59 PM Reading:
 Announcements Filtering Homework 2 is due Apr 26, :59 PM eading: Chapter 4: Linear Filters CSE 52 Lecture 6 mage Filtering nput Output Filter (From Bill Freeman) Example: Smoothing by Averaging Linear
Announcements Filtering Homework 2 is due Apr 26, :59 PM eading: Chapter 4: Linear Filters CSE 52 Lecture 6 mage Filtering nput Output Filter (From Bill Freeman) Example: Smoothing by Averaging Linear
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 11 Oct 3 rd, 2017 Pranav Mantini Slides from Dr. Shishir K Shah, and Frank Liu Review: 2D Discrete Fourier Transform If I is an image of size N then Sin
Digital Image Processing COSC 6380/4393 Lecture 11 Oct 3 rd, 2017 Pranav Mantini Slides from Dr. Shishir K Shah, and Frank Liu Review: 2D Discrete Fourier Transform If I is an image of size N then Sin
TRACKING and DETECTION in COMPUTER VISION Filtering and edge detection
 Technischen Universität München Winter Semester 0/0 TRACKING and DETECTION in COMPUTER VISION Filtering and edge detection Slobodan Ilić Overview Image formation Convolution Non-liner filtering: Median
Technischen Universität München Winter Semester 0/0 TRACKING and DETECTION in COMPUTER VISION Filtering and edge detection Slobodan Ilić Overview Image formation Convolution Non-liner filtering: Median
Edge Detection PSY 5018H: Math Models Hum Behavior, Prof. Paul Schrater, Spring 2005
 Edge Detection PSY 5018H: Math Models Hum Behavior, Prof. Paul Schrater, Spring 2005 Gradients and edges Points of sharp change in an image are interesting: change in reflectance change in object change
Edge Detection PSY 5018H: Math Models Hum Behavior, Prof. Paul Schrater, Spring 2005 Gradients and edges Points of sharp change in an image are interesting: change in reflectance change in object change
Image preprocessing in spatial domain
 Image preprocessing in spatial domain Sharpening, image derivatives, Laplacian, edges Revision: 1.2, dated: May 25, 2007 Tomáš Svoboda Czech Technical University, Faculty of Electrical Engineering Center
Image preprocessing in spatial domain Sharpening, image derivatives, Laplacian, edges Revision: 1.2, dated: May 25, 2007 Tomáš Svoboda Czech Technical University, Faculty of Electrical Engineering Center
Templates, Image Pyramids, and Filter Banks
 Templates, Image Pyramids, and Filter Banks 09/9/ Computer Vision James Hays, Brown Slides: Hoiem and others Review. Match the spatial domain image to the Fourier magnitude image 2 3 4 5 B A C D E Slide:
Templates, Image Pyramids, and Filter Banks 09/9/ Computer Vision James Hays, Brown Slides: Hoiem and others Review. Match the spatial domain image to the Fourier magnitude image 2 3 4 5 B A C D E Slide:
Intensity Transformations and Spatial Filtering: WHICH ONE LOOKS BETTER? Intensity Transformations and Spatial Filtering: WHICH ONE LOOKS BETTER?
 : WHICH ONE LOOKS BETTER? 3.1 : WHICH ONE LOOKS BETTER? 3.2 1 Goal: Image enhancement seeks to improve the visual appearance of an image, or convert it to a form suited for analysis by a human or a machine.
: WHICH ONE LOOKS BETTER? 3.1 : WHICH ONE LOOKS BETTER? 3.2 1 Goal: Image enhancement seeks to improve the visual appearance of an image, or convert it to a form suited for analysis by a human or a machine.
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 13 Oct 2 nd, 2018 Pranav Mantini Slides from Dr. Shishir K Shah, and Frank Liu Review f 0 0 0 1 0 0 0 0 w 1 2 3 2 8 Zero Padding 0 0 0 0 0 0 0 1 0 0 0 0
Digital Image Processing COSC 6380/4393 Lecture 13 Oct 2 nd, 2018 Pranav Mantini Slides from Dr. Shishir K Shah, and Frank Liu Review f 0 0 0 1 0 0 0 0 w 1 2 3 2 8 Zero Padding 0 0 0 0 0 0 0 1 0 0 0 0
Edge Detection. Computer Vision P. Schrater Spring 2003
 Edge Detection Computer Vision P. Schrater Spring 2003 Simplest Model: (Canny) Edge(x) = a U(x) + n(x) U(x)? x=0 Convolve image with U and find points with high magnitude. Choose value by comparing with
Edge Detection Computer Vision P. Schrater Spring 2003 Simplest Model: (Canny) Edge(x) = a U(x) + n(x) U(x)? x=0 Convolve image with U and find points with high magnitude. Choose value by comparing with
Lecture 3: Linear Filters
 Lecture 3: Linear Filters Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Images as functions Linear systems (filters) Convolution and correlation Discrete Fourier Transform (DFT)
Lecture 3: Linear Filters Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Images as functions Linear systems (filters) Convolution and correlation Discrete Fourier Transform (DFT)
Lecture 7: Edge Detection
 #1 Lecture 7: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Definition of an Edge First Order Derivative Approximation as Edge Detector #2 This Lecture Examples of Edge Detection
#1 Lecture 7: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Definition of an Edge First Order Derivative Approximation as Edge Detector #2 This Lecture Examples of Edge Detection
Spatial Enhancement Region operations: k'(x,y) = F( k(x-m, y-n), k(x,y), k(x+m,y+n) ]
![Spatial Enhancement Region operations: k'(x,y) = F( k(x-m, y-n), k(x,y), k(x+m,y+n) ]](/thumbs/77/75889528.jpg "Spatial Enhancement Region operations: k'(x,y) = F( k(x-m, y-n), k(x,y), k(x+m,y+n) ]") CEE 615: Digital Image Processing Spatial Enhancements 1 Spatial Enhancement Region operations: k'(x,y) = F( k(x-m, y-n), k(x,y), k(x+m,y+n) ] Template (Windowing) Operations Template (window, box, kernel)
CEE 615: Digital Image Processing Spatial Enhancements 1 Spatial Enhancement Region operations: k'(x,y) = F( k(x-m, y-n), k(x,y), k(x+m,y+n) ] Template (Windowing) Operations Template (window, box, kernel)
Lecture 3: Linear Filters
 Lecture 3: Linear Filters Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Images as functions Linear systems (filters) Convolution and correlation Discrete Fourier Transform (DFT)
Lecture 3: Linear Filters Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Images as functions Linear systems (filters) Convolution and correlation Discrete Fourier Transform (DFT)
Empirical Mean and Variance!
 Global Image Properties! Global image properties refer to an image as a whole rather than components. Computation of global image properties is often required for image enhancement, preceding image analysis.!
Global Image Properties! Global image properties refer to an image as a whole rather than components. Computation of global image properties is often required for image enhancement, preceding image analysis.!
CAP 5415 Computer Vision Fall 2011
 CAP 545 Computer Vision Fall 2 Dr. Mubarak Sa Univ. o Central Florida www.cs.uc.edu/~vision/courses/cap545/all22 Oice 247-F HEC Filtering Lecture-2 General Binary Gray Scale Color Binary Images Y Row X
CAP 545 Computer Vision Fall 2 Dr. Mubarak Sa Univ. o Central Florida www.cs.uc.edu/~vision/courses/cap545/all22 Oice 247-F HEC Filtering Lecture-2 General Binary Gray Scale Color Binary Images Y Row X
Image Filtering. Slides, adapted from. Steve Seitz and Rick Szeliski, U.Washington
 Image Filtering Slides, adapted from Steve Seitz and Rick Szeliski, U.Washington The power of blur All is Vanity by Charles Allen Gillbert (1873-1929) Harmon LD & JuleszB (1973) The recognition of faces.
Image Filtering Slides, adapted from Steve Seitz and Rick Szeliski, U.Washington The power of blur All is Vanity by Charles Allen Gillbert (1873-1929) Harmon LD & JuleszB (1973) The recognition of faces.
Computer Vision Lecture 3
 Demo Haribo Classification Computer Vision Lecture 3 Linear Filters 23..24 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Code available on the class website...
Demo Haribo Classification Computer Vision Lecture 3 Linear Filters 23..24 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Code available on the class website...
Linear Operators and Fourier Transform
 Linear Operators and Fourier Transform DD2423 Image Analysis and Computer Vision Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 13, 2013
Linear Operators and Fourier Transform DD2423 Image Analysis and Computer Vision Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 13, 2013
Laplacian Filters. Sobel Filters. Laplacian Filters. Laplacian Filters. Laplacian Filters. Laplacian Filters
 Sobel Filters Note that smoothing the image before applying a Sobel filter typically gives better results. Even thresholding the Sobel filtered image cannot usually create precise, i.e., -pixel wide, edges.
Sobel Filters Note that smoothing the image before applying a Sobel filter typically gives better results. Even thresholding the Sobel filtered image cannot usually create precise, i.e., -pixel wide, edges.
Outline. Convolution. Filtering
 Filtering Outline Convolution Filtering Logistics HW1 HW2 - out tomorrow Recall: what is a digital (grayscale) image? Matrix of integer values Images as height fields Let s think of image as zero-padded
Filtering Outline Convolution Filtering Logistics HW1 HW2 - out tomorrow Recall: what is a digital (grayscale) image? Matrix of integer values Images as height fields Let s think of image as zero-padded
CAP 5415 Computer Vision
 CAP 545 Computer Vision Dr. Mubarak Sa Univ. o Central Florida Filtering Lecture-2 Contents Filtering/Smooting/Removing Noise Convolution/Correlation Image Derivatives Histogram Some Matlab Functions General
CAP 545 Computer Vision Dr. Mubarak Sa Univ. o Central Florida Filtering Lecture-2 Contents Filtering/Smooting/Removing Noise Convolution/Correlation Image Derivatives Histogram Some Matlab Functions General
Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems
 Robots for People --- A project for intelligent integrated systems") 1 Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems V. Estivill-Castro 2 Perception Concepts Vision Chapter 4 (textbook) Sections 4.3 to 4.5 What is the course
1 Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems V. Estivill-Castro 2 Perception Concepts Vision Chapter 4 (textbook) Sections 4.3 to 4.5 What is the course
Filtering and Edge Detection
 Filtering and Edge Detection Local Neighborhoods Hard to tell anything from a single pixel Example: you see a reddish pixel. Is this the object s color? Illumination? Noise? The next step in order of complexity
Filtering and Edge Detection Local Neighborhoods Hard to tell anything from a single pixel Example: you see a reddish pixel. Is this the object s color? Illumination? Noise? The next step in order of complexity
Edge Detection in Computer Vision Systems
 1 CS332 Visual Processing in Computer and Biological Vision Systems Edge Detection in Computer Vision Systems This handout summarizes much of the material on the detection and description of intensity
1 CS332 Visual Processing in Computer and Biological Vision Systems Edge Detection in Computer Vision Systems This handout summarizes much of the material on the detection and description of intensity
Edge Detection. CS 650: Computer Vision
 CS 650: Computer Vision Edges and Gradients Edge: local indication of an object transition Edge detection: local operators that find edges (usually involves convolution) Local intensity transitions are
CS 650: Computer Vision Edges and Gradients Edge: local indication of an object transition Edge detection: local operators that find edges (usually involves convolution) Local intensity transitions are
CS4670: Computer Vision Kavita Bala. Lecture 7: Harris Corner Detec=on
 CS4670: Computer Vision Kavita Bala Lecture 7: Harris Corner Detec=on Announcements HW 1 will be out soon Sign up for demo slots for PA 1 Remember that both partners have to be there We will ask you to
CS4670: Computer Vision Kavita Bala Lecture 7: Harris Corner Detec=on Announcements HW 1 will be out soon Sign up for demo slots for PA 1 Remember that both partners have to be there We will ask you to
Introduction to Linear Systems
 cfl David J Fleet, 998 Introduction to Linear Systems David Fleet For operator T, input I, and response R = T [I], T satisfies: ffl homogeniety: iff T [ai] = at[i] 8a 2 C ffl additivity: iff T [I + I 2
cfl David J Fleet, 998 Introduction to Linear Systems David Fleet For operator T, input I, and response R = T [I], T satisfies: ffl homogeniety: iff T [ai] = at[i] 8a 2 C ffl additivity: iff T [I + I 2
Image Filtering, Edges and Image Representation
 Image Filtering, Edges and Image Representation Capturing what s important Req reading: Chapter 7, 9 F&P Adelson, Simoncelli and Freeman (handout online) Opt reading: Horn 7 & 8 FP 8 February 19, 8 A nice
Image Filtering, Edges and Image Representation Capturing what s important Req reading: Chapter 7, 9 F&P Adelson, Simoncelli and Freeman (handout online) Opt reading: Horn 7 & 8 FP 8 February 19, 8 A nice
The Frequency Domain, without tears. Many slides borrowed from Steve Seitz
 The Frequency Domain, without tears Many slides borrowed from Steve Seitz Somewhere in Cinque Terre, May 2005 CS194: Image Manipulation & Computational Photography Alexei Efros, UC Berkeley, Fall 2016
The Frequency Domain, without tears Many slides borrowed from Steve Seitz Somewhere in Cinque Terre, May 2005 CS194: Image Manipulation & Computational Photography Alexei Efros, UC Berkeley, Fall 2016
Basic Linear Algebra in MATLAB
 Basic Linear Algebra in MATLAB 9.29 Optional Lecture 2 In the last optional lecture we learned the the basic type in MATLAB is a matrix of double precision floating point numbers. You learned a number
Basic Linear Algebra in MATLAB 9.29 Optional Lecture 2 In the last optional lecture we learned the the basic type in MATLAB is a matrix of double precision floating point numbers. You learned a number
Lecture 8: Interest Point Detection. Saad J Bedros
 #1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Review of Edge Detectors #2 Today s Lecture Interest Points Detection What do we mean with Interest Point Detection in an Image Goal:
#1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Review of Edge Detectors #2 Today s Lecture Interest Points Detection What do we mean with Interest Point Detection in an Image Goal:
Computer Vision & Digital Image Processing
 Computer Vision & Digital Image Processing Image Restoration and Reconstruction I Dr. D. J. Jackson Lecture 11-1 Image restoration Restoration is an objective process that attempts to recover an image
Computer Vision & Digital Image Processing Image Restoration and Reconstruction I Dr. D. J. Jackson Lecture 11-1 Image restoration Restoration is an objective process that attempts to recover an image
Image Processing. Waleed A. Yousef Faculty of Computers and Information, Helwan University. April 3, 2010
 Image Processing Waleed A. Yousef Faculty of Computers and Information, Helwan University. April 3, 2010 Ch3. Image Enhancement in the Spatial Domain Note that T (m) = 0.5 E. The general law of contrast
Image Processing Waleed A. Yousef Faculty of Computers and Information, Helwan University. April 3, 2010 Ch3. Image Enhancement in the Spatial Domain Note that T (m) = 0.5 E. The general law of contrast
18/10/2017. Image Enhancement in the Spatial Domain: Gray-level transforms. Image Enhancement in the Spatial Domain: Gray-level transforms
 Gray-level transforms Gray-level transforms Generic, possibly nonlinear, pointwise operator (intensity mapping, gray-level transformation): Basic gray-level transformations: Negative: s L 1 r Generic log:
Gray-level transforms Gray-level transforms Generic, possibly nonlinear, pointwise operator (intensity mapping, gray-level transformation): Basic gray-level transformations: Negative: s L 1 r Generic log:
ITK Filters. Thresholding Edge Detection Gradients Second Order Derivatives Neighborhood Filters Smoothing Filters Distance Map Image Transforms
 ITK Filters Thresholding Edge Detection Gradients Second Order Derivatives Neighborhood Filters Smoothing Filters Distance Map Image Transforms ITCS 6010:Biomedical Imaging and Visualization 1 ITK Filters:
ITK Filters Thresholding Edge Detection Gradients Second Order Derivatives Neighborhood Filters Smoothing Filters Distance Map Image Transforms ITCS 6010:Biomedical Imaging and Visualization 1 ITK Filters:
Prof. Mohd Zaid Abdullah Room No:
 EEE 52/4 Advnced Digital Signal and Image Processing Tuesday, 00-300 hrs, Data Com. Lab. Friday, 0800-000 hrs, Data Com. Lab Prof. Mohd Zaid Abdullah Room No: 5 Email: mza@usm.my www.eng.usm.my Electromagnetic
EEE 52/4 Advnced Digital Signal and Image Processing Tuesday, 00-300 hrs, Data Com. Lab. Friday, 0800-000 hrs, Data Com. Lab Prof. Mohd Zaid Abdullah Room No: 5 Email: mza@usm.my www.eng.usm.my Electromagnetic
The Frequency Domain : Computational Photography Alexei Efros, CMU, Fall Many slides borrowed from Steve Seitz
 The Frequency Domain 15-463: Computational Photography Alexei Efros, CMU, Fall 2008 Somewhere in Cinque Terre, May 2005 Many slides borrowed from Steve Seitz Salvador Dali Gala Contemplating the Mediterranean
The Frequency Domain 15-463: Computational Photography Alexei Efros, CMU, Fall 2008 Somewhere in Cinque Terre, May 2005 Many slides borrowed from Steve Seitz Salvador Dali Gala Contemplating the Mediterranean
IMAGE ENHANCEMENT II (CONVOLUTION)
") MOTIVATION Recorded images often exhibit problems such as: blurry noisy Image enhancement aims to improve visual quality Cosmetic processing Usually empirical techniques, with ad hoc parameters ( whatever
MOTIVATION Recorded images often exhibit problems such as: blurry noisy Image enhancement aims to improve visual quality Cosmetic processing Usually empirical techniques, with ad hoc parameters ( whatever
Enhancement Using Local Histogram
 Enhancement Using Local Histogram Used to enhance details over small portions o the image. Deine a square or rectangular neighborhood hose center moves rom piel to piel. Compute local histogram based on
Enhancement Using Local Histogram Used to enhance details over small portions o the image. Deine a square or rectangular neighborhood hose center moves rom piel to piel. Compute local histogram based on
Introduction to Computer Vision
 Introduction to Computer Vision Michael J. Black Sept 2009 Lecture 8: Pyramids and image derivatives Goals Images as functions Derivatives of images Edges and gradients Laplacian pyramids Code for lecture
Introduction to Computer Vision Michael J. Black Sept 2009 Lecture 8: Pyramids and image derivatives Goals Images as functions Derivatives of images Edges and gradients Laplacian pyramids Code for lecture
CS 3710: Visual Recognition Describing Images with Features. Adriana Kovashka Department of Computer Science January 8, 2015
 CS 3710: Visual Recognition Describing Images with Features Adriana Kovashka Department of Computer Science January 8, 2015 Plan for Today Presentation assignments + schedule changes Image filtering Feature
CS 3710: Visual Recognition Describing Images with Features Adriana Kovashka Department of Computer Science January 8, 2015 Plan for Today Presentation assignments + schedule changes Image filtering Feature
I Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung University. Computer Vision: 4. Filtering
 I Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung University Computer Vision: 4. Filtering Outline Impulse response and convolution. Linear filter and image pyramid. Textbook: David A. Forsyth
I Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung University Computer Vision: 4. Filtering Outline Impulse response and convolution. Linear filter and image pyramid. Textbook: David A. Forsyth
PDEs in Image Processing, Tutorials
 PDEs in Image Processing, Tutorials Markus Grasmair Vienna, Winter Term 2010 2011 Direct Methods Let X be a topological space and R: X R {+ } some functional. following definitions: The mapping R is lower
PDEs in Image Processing, Tutorials Markus Grasmair Vienna, Winter Term 2010 2011 Direct Methods Let X be a topological space and R: X R {+ } some functional. following definitions: The mapping R is lower
Convolution Spatial Aliasing Frequency domain filtering fundamentals Applications Image smoothing Image sharpening
 Frequency Domain Filtering Correspondence between Spatial and Frequency Filtering Fourier Transform Brief Introduction Sampling Theory 2 D Discrete Fourier Transform Convolution Spatial Aliasing Frequency
Frequency Domain Filtering Correspondence between Spatial and Frequency Filtering Fourier Transform Brief Introduction Sampling Theory 2 D Discrete Fourier Transform Convolution Spatial Aliasing Frequency
Additional Pointers. Introduction to Computer Vision. Convolution. Area operations: Linear filtering
 Additional Pointers Introduction to Computer Vision CS / ECE 181B andout #4 : Available this afternoon Midterm: May 6, 2004 W #2 due tomorrow Ack: Prof. Matthew Turk for the lecture slides. See my ECE
Additional Pointers Introduction to Computer Vision CS / ECE 181B andout #4 : Available this afternoon Midterm: May 6, 2004 W #2 due tomorrow Ack: Prof. Matthew Turk for the lecture slides. See my ECE
Convolution and Linear Systems
 CS 450: Introduction to Digital Signal and Image Processing Bryan Morse BYU Computer Science Introduction Analyzing Systems Goal: analyze a device that turns one signal into another. Notation: f (t) g(t)
CS 450: Introduction to Digital Signal and Image Processing Bryan Morse BYU Computer Science Introduction Analyzing Systems Goal: analyze a device that turns one signal into another. Notation: f (t) g(t)
COMP344 Digital Image Processing Fall 2007 Final Examination
 COMP344 Digital Image Processing Fall 2007 Final Examination Time allowed: 2 hours Name Student ID Email Question 1 Question 2 Question 3 Question 4 Question 5 Question 6 Total With model answer HK University
COMP344 Digital Image Processing Fall 2007 Final Examination Time allowed: 2 hours Name Student ID Email Question 1 Question 2 Question 3 Question 4 Question 5 Question 6 Total With model answer HK University
ECG782: Multidimensional Digital Signal Processing
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 05 Image Processing Basics 13/02/04 http://www.ee.unlv.edu/~b1morris/ecg782/
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 05 Image Processing Basics 13/02/04 http://www.ee.unlv.edu/~b1morris/ecg782/
Image Enhancement in the frequency domain. Inel 5046 Prof. Vidya Manian
 Image Enhancement in the frequency domain Inel 5046 Prof. Vidya Manian Introduction 2D Fourier transform Basics of filtering in frequency domain Ideal low pass filter Gaussian low pass filter Ideal high
Image Enhancement in the frequency domain Inel 5046 Prof. Vidya Manian Introduction 2D Fourier transform Basics of filtering in frequency domain Ideal low pass filter Gaussian low pass filter Ideal high
The Frequency Domain. Many slides borrowed from Steve Seitz
 The Frequency Domain Many slides borrowed from Steve Seitz Somewhere in Cinque Terre, May 2005 15-463: Computational Photography Alexei Efros, CMU, Spring 2010 Salvador Dali Gala Contemplating the Mediterranean
The Frequency Domain Many slides borrowed from Steve Seitz Somewhere in Cinque Terre, May 2005 15-463: Computational Photography Alexei Efros, CMU, Spring 2010 Salvador Dali Gala Contemplating the Mediterranean
Image Gradients and Gradient Filtering Computer Vision
 Image Gradients and Gradient Filtering 16-385 Computer Vision What is an image edge? Recall that an image is a 2D function f(x) edge edge How would you detect an edge? What kinds of filter would you use?
Image Gradients and Gradient Filtering 16-385 Computer Vision What is an image edge? Recall that an image is a 2D function f(x) edge edge How would you detect an edge? What kinds of filter would you use?
Lecture 8: Interest Point Detection. Saad J Bedros
 #1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Last Lecture : Edge Detection Preprocessing of image is desired to eliminate or at least minimize noise effects There is always tradeoff
#1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Last Lecture : Edge Detection Preprocessing of image is desired to eliminate or at least minimize noise effects There is always tradeoff
Feature extraction: Corners and blobs
 Feature extraction: Corners and blobs Review: Linear filtering and edge detection Name two different kinds of image noise Name a non-linear smoothing filter What advantages does median filtering have over
Feature extraction: Corners and blobs Review: Linear filtering and edge detection Name two different kinds of image noise Name a non-linear smoothing filter What advantages does median filtering have over
Digital Image Processing. Filtering in the Frequency Domain
 2D Linear Systems 2D Fourier Transform and its Properties The Basics of Filtering in Frequency Domain Image Smoothing Image Sharpening Selective Filtering Implementation Tips 1 General Definition: System
2D Linear Systems 2D Fourier Transform and its Properties The Basics of Filtering in Frequency Domain Image Smoothing Image Sharpening Selective Filtering Implementation Tips 1 General Definition: System
LoG Blob Finding and Scale. Scale Selection. Blobs (and scale selection) Achieving scale covariance. Blob detection in 2D. Blob detection in 2D
 Achieving scale covariance. Blob detection in 2D. Blob detection in 2D") Achieving scale covariance Blobs (and scale selection) Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region
Achieving scale covariance Blobs (and scale selection) Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region
Lecture 4 Filtering in the Frequency Domain. Lin ZHANG, PhD School of Software Engineering Tongji University Spring 2016
 Lecture 4 Filtering in the Frequency Domain Lin ZHANG, PhD School of Software Engineering Tongji University Spring 2016 Outline Background From Fourier series to Fourier transform Properties of the Fourier
Lecture 4 Filtering in the Frequency Domain Lin ZHANG, PhD School of Software Engineering Tongji University Spring 2016 Outline Background From Fourier series to Fourier transform Properties of the Fourier
Medical Image Analysis
 Medical Image Analysis CS 593 / 791 Computer Science and Electrical Engineering Dept. West Virginia University 20th January 2006 Outline 1 Discretizing the heat equation 2 Outline 1 Discretizing the heat
Medical Image Analysis CS 593 / 791 Computer Science and Electrical Engineering Dept. West Virginia University 20th January 2006 Outline 1 Discretizing the heat equation 2 Outline 1 Discretizing the heat
Discrete Fourier Transform
 Discrete Fourier Transform DD2423 Image Analysis and Computer Vision Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 13, 2013 Mårten Björkman
Discrete Fourier Transform DD2423 Image Analysis and Computer Vision Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 13, 2013 Mårten Björkman
Lifting Detail from Darkness
 Lifting Detail from Darkness J.P.Lewis zilla@computer.org Disney The Secret Lab Lewis / Detail from Darkness p.1/38 Brightness-Detail Decomposition detail image image intensity Separate detail by Wiener
Lifting Detail from Darkness J.P.Lewis zilla@computer.org Disney The Secret Lab Lewis / Detail from Darkness p.1/38 Brightness-Detail Decomposition detail image image intensity Separate detail by Wiener
Image processing and Computer Vision
 1 / 1 Image processing and Computer Vision Continuous Optimization and applications to image processing Martin de La Gorce martin.de-la-gorce@enpc.fr February 2015 Optimization 2 / 1 We have a function
1 / 1 Image processing and Computer Vision Continuous Optimization and applications to image processing Martin de La Gorce martin.de-la-gorce@enpc.fr February 2015 Optimization 2 / 1 We have a function
Image Enhancement in the frequency domain. GZ Chapter 4
 Image Enhancement in the frequency domain GZ Chapter 4 Contents In this lecture we will look at image enhancement in the frequency domain The Fourier series & the Fourier transform Image Processing in
Image Enhancement in the frequency domain GZ Chapter 4 Contents In this lecture we will look at image enhancement in the frequency domain The Fourier series & the Fourier transform Image Processing in
Slow mo guys Saccades. https://youtu.be/fmg9zohesgq?t=4s
 Slow mo guys Saccades https://youtu.be/fmg9zohesgq?t=4s Thinking in Frequency Computer Vision James Hays Slides: Hoiem, Efros, and others Recap of Wednesday Linear filtering is dot product at each position
Slow mo guys Saccades https://youtu.be/fmg9zohesgq?t=4s Thinking in Frequency Computer Vision James Hays Slides: Hoiem, Efros, and others Recap of Wednesday Linear filtering is dot product at each position
Vectors [and more on masks] Vector space theory applies directly to several image processing/ representation problems
![Vectors [and more on masks] Vector space theory applies directly to several image processing/ representation problems](/thumbs/74/71250091.jpg "Vectors [and more on masks] Vector space theory applies directly to several image processing/ representation problems") Vectors [and more on masks] Vector space theory applies directly to several image processing/ representation problems 1 Image as a sum of basic images What if every person s portrait photo could be expressed
Vectors [and more on masks] Vector space theory applies directly to several image processing/ representation problems 1 Image as a sum of basic images What if every person s portrait photo could be expressed
Achieving scale covariance
 Achieving scale covariance Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region size that is covariant
Achieving scale covariance Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region size that is covariant
Basics on 2-D 2 D Random Signal
 Basics on -D D Random Signal Spring 06 Instructor: K. J. Ray Liu ECE Department, Univ. of Maryland, College Park Overview Last Time: Fourier Analysis for -D signals Image enhancement via spatial filtering
Basics on -D D Random Signal Spring 06 Instructor: K. J. Ray Liu ECE Department, Univ. of Maryland, College Park Overview Last Time: Fourier Analysis for -D signals Image enhancement via spatial filtering
ECG782: Multidimensional Digital Signal Processing
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Filtering in the Frequency Domain http://www.ee.unlv.edu/~b1morris/ecg782/ 2 Outline Background
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Filtering in the Frequency Domain http://www.ee.unlv.edu/~b1morris/ecg782/ 2 Outline Background
Roadmap. Introduction to image analysis (computer vision) Theory of edge detection. Applications
 Theory of edge detection. Applications") Edge Detection Roadmap Introduction to image analysis (computer vision) Its connection with psychology and neuroscience Why is image analysis difficult? Theory of edge detection Gradient operator Advanced
Edge Detection Roadmap Introduction to image analysis (computer vision) Its connection with psychology and neuroscience Why is image analysis difficult? Theory of edge detection Gradient operator Advanced
Image Analysis. Feature extraction: corners and blobs
 Image Analysis Feature extraction: corners and blobs Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Svetlana Lazebnik, University of North Carolina at Chapel Hill (http://www.cs.unc.edu/~lazebnik/spring10/).
Image Analysis Feature extraction: corners and blobs Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Svetlana Lazebnik, University of North Carolina at Chapel Hill (http://www.cs.unc.edu/~lazebnik/spring10/).
Image Degradation Model (Linear/Additive)
") Image Degradation Model (Linear/Additive),,,,,,,, g x y h x y f x y x y G uv H uv F uv N uv 1 Source of noise Image acquisition (digitization) Image transmission Spatial properties of noise Statistical
Image Degradation Model (Linear/Additive),,,,,,,, g x y h x y f x y x y G uv H uv F uv N uv 1 Source of noise Image acquisition (digitization) Image transmission Spatial properties of noise Statistical
DISCRETE FOURIER TRANSFORM
 DD2423 Image Processing and Computer Vision DISCRETE FOURIER TRANSFORM Mårten Björkman Computer Vision and Active Perception School of Computer Science and Communication November 1, 2012 1 Terminology:
DD2423 Image Processing and Computer Vision DISCRETE FOURIER TRANSFORM Mårten Björkman Computer Vision and Active Perception School of Computer Science and Communication November 1, 2012 1 Terminology:
Used to extract image components that are useful in the representation and description of region shape, such as
 Used to extract image components that are useful in the representation and description of region shape, such as boundaries extraction skeletons convex hull morphological filtering thinning pruning Sets
Used to extract image components that are useful in the representation and description of region shape, such as boundaries extraction skeletons convex hull morphological filtering thinning pruning Sets
Numerical Methods in TEM Convolution and Deconvolution
 Numerical Methods in TEM Convolution and Deconvolution Christoph T. Koch Max Planck Institut für Metallforschung http://hrem.mpi-stuttgart.mpg.de/koch/vorlesung Applications of Convolution in TEM Smoothing
Numerical Methods in TEM Convolution and Deconvolution Christoph T. Koch Max Planck Institut für Metallforschung http://hrem.mpi-stuttgart.mpg.de/koch/vorlesung Applications of Convolution in TEM Smoothing
Why does a lower resolution image still make sense to us? What do we lose? Image:
 2D FREQUENCY DOMAIN The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their
2D FREQUENCY DOMAIN The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their
Gaussian Basics Random Processes Filtering of Random Processes Signal Space Concepts
 White Gaussian Noise I Definition: A (real-valued) random process X t is called white Gaussian Noise if I X t is Gaussian for each time instance t I Mean: m X (t) =0 for all t I Autocorrelation function:
White Gaussian Noise I Definition: A (real-valued) random process X t is called white Gaussian Noise if I X t is Gaussian for each time instance t I Mean: m X (t) =0 for all t I Autocorrelation function:
Suppose we have a one-dimensional discrete signal f(x). The convolution of f with a kernel g is defined as h(x) = f(x)*g(x) = w 1. f(i)g(x i), (3.
. The convolution of f with a kernel g is defined as h(x) = f(x)*g(x) = w 1. f(i)g(x i), (3.") Chapter 3 Image filtering Filtering an image involves transforming the values of the pixels by taking into account the values of the neighboring pixels. Filtering is a basic concept of signal and image
Chapter 3 Image filtering Filtering an image involves transforming the values of the pixels by taking into account the values of the neighboring pixels. Filtering is a basic concept of signal and image
Digital Image Processing. Chapter 4: Image Enhancement in the Frequency Domain
 Digital Image Processing Chapter 4: Image Enhancement in the Frequency Domain Image Enhancement in Frequency Domain Objective: To understand the Fourier Transform and frequency domain and how to apply
Digital Image Processing Chapter 4: Image Enhancement in the Frequency Domain Image Enhancement in Frequency Domain Objective: To understand the Fourier Transform and frequency domain and how to apply
Chapter 16. Local Operations
 Chapter 16 Local Operations g[x, y] =O{f[x ± x, y ± y]} In many common image processing operations, the output pixel is a weighted combination of the gray values of pixels in the neighborhood of the input
Chapter 16 Local Operations g[x, y] =O{f[x ± x, y ± y]} In many common image processing operations, the output pixel is a weighted combination of the gray values of pixels in the neighborhood of the input
Recap of Monday. Linear filtering. Be aware of details for filter size, extrapolation, cropping
 Recap of Monday Linear filtering h[ m, n] k, l f [ k, l] I[ m Not a matrix multiplication Sum over Hadamard product k, n l] Can smooth, sharpen, translate (among many other uses) 1 1 1 1 1 1 1 1 1 Be aware
Recap of Monday Linear filtering h[ m, n] k, l f [ k, l] I[ m Not a matrix multiplication Sum over Hadamard product k, n l] Can smooth, sharpen, translate (among many other uses) 1 1 1 1 1 1 1 1 1 Be aware
Linear Diffusion. E9 242 STIP- R. Venkatesh Babu IISc
 Linear Diffusion Derivation of Heat equation Consider a 2D hot plate with Initial temperature profile I 0 (x, y) Uniform (isotropic) conduction coefficient c Unit thickness (along z) Problem: What is temperature
Linear Diffusion Derivation of Heat equation Consider a 2D hot plate with Initial temperature profile I 0 (x, y) Uniform (isotropic) conduction coefficient c Unit thickness (along z) Problem: What is temperature