Introduction to Computer Vision
|
|
|
- Mervin Hunt
- 5 years ago
- Views:
Transcription
1 Introduction to Computer Vision Michael J. Black Sept 2009 Lecture 8: Pyramids and image derivatives
2 Goals Images as functions Derivatives of images Edges and gradients Laplacian pyramids
3 Code for lecture Matlab/lecture5Script.m Matlab/lecture6featureScript.m
4 Next week I m at ICCV in Japan Monday: Deqing Sun features and correlation (assignment 1) Wednesday: data for assignment 2. important that you attend. Friday: Silvia Zuffi color




5 Image Filtering Smoothing and sharpening Edge detection Feature detection/search Source: T. Darrell

")


6 Images as functions x f(x,y) y Image is a function, f, from R 2 to R: f( x, y ) gives the image intensity at position ( x, y ) Realistically, we expect the image only to be defined over a rectangle, with a finite range: f: [a,b] x [c,d] [0, 1.0] Source: S. Seitz
7 Images as functions A color image is just three functions pasted together. We can write this as a vector-valued function: Source: S. Seitz
8 Images as Functions Images are a discretely sampled representation of a continuous signal I(x) x
9 Images as Functions Images are a discretely sampled representation of a continuous signal I(x) x
10 Images as Functions What if I want to know I(x 0 +dx) for small dx<1? I(x) x 0 x
11 Taylor Series Approximation I(x) x 0 Locally linear approximation to the function using an estimate of the slope. How do we compute the partial derivatives of an image? x
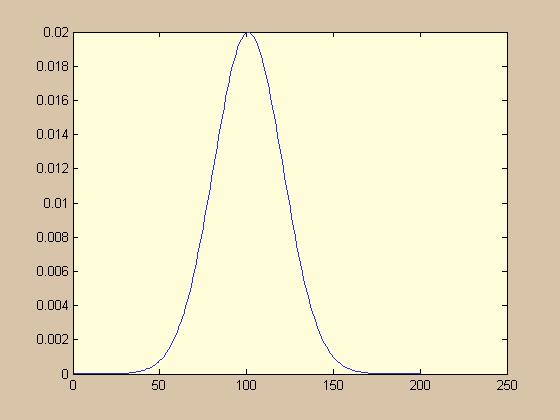
12 Simple Signal Discontinuous Smoothed with Gaussian
13
14 Extrema of first derivative
15 Idealized: step What are edges (1D) ramp line or bar roof

16 Actual 1D profile

17 Smoothed with a Gaussian
18 Edges Correspond to fast changes Where the magnitude of the derivative is large
19 Compute Derivatives We can implement this as a linear filter: [ -1 1] Or [-1 0 1] symmetric
20 Partial Derivatives Often approximated with simple filters: D x = D y = Finite differences
21 Barbara signal and derivatives
22 Derivatives and Smoothing? G

23 Derivatives and Smoothing G dg
24 In 2D Compare with [-1 0 1] filters.

25 1D Barbara signal Smoothed Signal First Derivative Note the amplification of small variations.
26 How can we detect edges? Find the peak in the derivative. Two issues: Should be a local maximum. Should be sufficiently high.
27 Thresholding the Derivative?


28 Finite differences Sept, 2007 Is this I x or I y Is the sign right?
 Ponce &")
29 Finite differences responding to noise Increasing noise (this is zero mean additive Gaussian noise) Ponce & Forsyth


30 1 pixel 3 pixels 7 pixels The scale of the smoothing filter affects derivative estimates, and also the semantics of the edges recovered. Note: strong edges persist across scales. Ponce & Forsyth
31 Barbara signal and derivatives What happens if we now take the derivative of the derivative?
32 Second Derivative Filter kernel? [1-2 1]
33 Maxima of first derivative zero crossings of second derivative
34 Step Edge The zero-crossings of the second derivative tell us the location of edges.
35 The Laplacian Just another linear filter.



36 The Laplacian center-surround Mexican hat
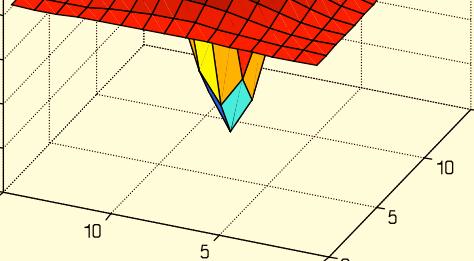
37 Approximating the Laplacian Difference of Gaussians at different scales.

38 Approximating the Laplacian Difference of Gaussians at different scales. DoG=fspecial('gaussian',15,2)- fspecial('gaussian',15,1); surf(dog)


39 The Laplacian Pyramid Gaussian Pyramid Laplacian Pyramid expand - = - = - = Sept, 2007


40 LoG zero crossings (where the filter response changes sign) sigma=4 sigma=2 Ponce & Forsyth
41

42


43
Lecture 6: Edge Detection. CAP 5415: Computer Vision Fall 2008
 Lecture 6: Edge Detection CAP 5415: Computer Vision Fall 2008 Announcements PS 2 is available Please read it by Thursday During Thursday lecture, I will be going over it in some detail Monday - Computer
Lecture 6: Edge Detection CAP 5415: Computer Vision Fall 2008 Announcements PS 2 is available Please read it by Thursday During Thursday lecture, I will be going over it in some detail Monday - Computer
Image Gradients and Gradient Filtering Computer Vision
 Image Gradients and Gradient Filtering 16-385 Computer Vision What is an image edge? Recall that an image is a 2D function f(x) edge edge How would you detect an edge? What kinds of filter would you use?
Image Gradients and Gradient Filtering 16-385 Computer Vision What is an image edge? Recall that an image is a 2D function f(x) edge edge How would you detect an edge? What kinds of filter would you use?
CSE 473/573 Computer Vision and Image Processing (CVIP)
") CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Lecture 11 Local Features 1 Schedule Last class We started local features Today More on local features Readings for
CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Lecture 11 Local Features 1 Schedule Last class We started local features Today More on local features Readings for
ECE Digital Image Processing and Introduction to Computer Vision. Outline
 2/9/7 ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 207. Recap Outline 2. Sharpening Filtering Illustration
2/9/7 ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 207. Recap Outline 2. Sharpening Filtering Illustration
Reading. 3. Image processing. Pixel movement. Image processing Y R I G Q
 Reading Jain, Kasturi, Schunck, Machine Vision. McGraw-Hill, 1995. Sections 4.-4.4, 4.5(intro), 4.5.5, 4.5.6, 5.1-5.4. 3. Image processing 1 Image processing An image processing operation typically defines
Reading Jain, Kasturi, Schunck, Machine Vision. McGraw-Hill, 1995. Sections 4.-4.4, 4.5(intro), 4.5.5, 4.5.6, 5.1-5.4. 3. Image processing 1 Image processing An image processing operation typically defines
Filtering and Edge Detection
 Filtering and Edge Detection Local Neighborhoods Hard to tell anything from a single pixel Example: you see a reddish pixel. Is this the object s color? Illumination? Noise? The next step in order of complexity
Filtering and Edge Detection Local Neighborhoods Hard to tell anything from a single pixel Example: you see a reddish pixel. Is this the object s color? Illumination? Noise? The next step in order of complexity
Edge Detection. Introduction to Computer Vision. Useful Mathematics Funcs. The bad news
 Edge Detection Introduction to Computer Vision CS / ECE 8B Thursday, April, 004 Edge detection (HO #5) Edge detection is a local area operator that seeks to find significant, meaningful changes in image
Edge Detection Introduction to Computer Vision CS / ECE 8B Thursday, April, 004 Edge detection (HO #5) Edge detection is a local area operator that seeks to find significant, meaningful changes in image
Image Filtering. Slides, adapted from. Steve Seitz and Rick Szeliski, U.Washington
 Image Filtering Slides, adapted from Steve Seitz and Rick Szeliski, U.Washington The power of blur All is Vanity by Charles Allen Gillbert (1873-1929) Harmon LD & JuleszB (1973) The recognition of faces.
Image Filtering Slides, adapted from Steve Seitz and Rick Szeliski, U.Washington The power of blur All is Vanity by Charles Allen Gillbert (1873-1929) Harmon LD & JuleszB (1973) The recognition of faces.
Lecture 04 Image Filtering
 Institute of Informatics Institute of Neuroinformatics Lecture 04 Image Filtering Davide Scaramuzza 1 Lab Exercise 2 - Today afternoon Room ETH HG E 1.1 from 13:15 to 15:00 Work description: your first
Institute of Informatics Institute of Neuroinformatics Lecture 04 Image Filtering Davide Scaramuzza 1 Lab Exercise 2 - Today afternoon Room ETH HG E 1.1 from 13:15 to 15:00 Work description: your first
Templates, Image Pyramids, and Filter Banks
 Templates, Image Pyramids, and Filter Banks 09/9/ Computer Vision James Hays, Brown Slides: Hoiem and others Review. Match the spatial domain image to the Fourier magnitude image 2 3 4 5 B A C D E Slide:
Templates, Image Pyramids, and Filter Banks 09/9/ Computer Vision James Hays, Brown Slides: Hoiem and others Review. Match the spatial domain image to the Fourier magnitude image 2 3 4 5 B A C D E Slide:
Lecture 7: Edge Detection
 #1 Lecture 7: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Definition of an Edge First Order Derivative Approximation as Edge Detector #2 This Lecture Examples of Edge Detection
#1 Lecture 7: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Definition of an Edge First Order Derivative Approximation as Edge Detector #2 This Lecture Examples of Edge Detection
Edge Detection. CS 650: Computer Vision
 CS 650: Computer Vision Edges and Gradients Edge: local indication of an object transition Edge detection: local operators that find edges (usually involves convolution) Local intensity transitions are
CS 650: Computer Vision Edges and Gradients Edge: local indication of an object transition Edge detection: local operators that find edges (usually involves convolution) Local intensity transitions are
Edge Detection. Computer Vision P. Schrater Spring 2003
 Edge Detection Computer Vision P. Schrater Spring 2003 Simplest Model: (Canny) Edge(x) = a U(x) + n(x) U(x)? x=0 Convolve image with U and find points with high magnitude. Choose value by comparing with
Edge Detection Computer Vision P. Schrater Spring 2003 Simplest Model: (Canny) Edge(x) = a U(x) + n(x) U(x)? x=0 Convolve image with U and find points with high magnitude. Choose value by comparing with
Lecture 3: Linear Filters
 Lecture 3: Linear Filters Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Images as functions Linear systems (filters) Convolution and correlation Discrete Fourier Transform (DFT)
Lecture 3: Linear Filters Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Images as functions Linear systems (filters) Convolution and correlation Discrete Fourier Transform (DFT)
Edge Detection PSY 5018H: Math Models Hum Behavior, Prof. Paul Schrater, Spring 2005
 Edge Detection PSY 5018H: Math Models Hum Behavior, Prof. Paul Schrater, Spring 2005 Gradients and edges Points of sharp change in an image are interesting: change in reflectance change in object change
Edge Detection PSY 5018H: Math Models Hum Behavior, Prof. Paul Schrater, Spring 2005 Gradients and edges Points of sharp change in an image are interesting: change in reflectance change in object change
Lecture 3: Linear Filters
 Lecture 3: Linear Filters Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Images as functions Linear systems (filters) Convolution and correlation Discrete Fourier Transform (DFT)
Lecture 3: Linear Filters Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Images as functions Linear systems (filters) Convolution and correlation Discrete Fourier Transform (DFT)
Edges and Scale. Image Features. Detecting edges. Origin of Edges. Solution: smooth first. Effects of noise
 Edges and Scale Image Features From Sandlot Science Slides revised from S. Seitz, R. Szeliski, S. Lazebnik, etc. Origin of Edges surface normal discontinuity depth discontinuity surface color discontinuity
Edges and Scale Image Features From Sandlot Science Slides revised from S. Seitz, R. Szeliski, S. Lazebnik, etc. Origin of Edges surface normal discontinuity depth discontinuity surface color discontinuity
Medical Image Analysis
 Medical Image Analysis CS 593 / 791 Computer Science and Electrical Engineering Dept. West Virginia University 23rd January 2006 Outline 1 Recap 2 Edge Enhancement 3 Experimental Results 4 The rest of
Medical Image Analysis CS 593 / 791 Computer Science and Electrical Engineering Dept. West Virginia University 23rd January 2006 Outline 1 Recap 2 Edge Enhancement 3 Experimental Results 4 The rest of
Introduction to Computer Vision
 Introduction to Computer Vision Michael J. Black Oct. 2009 Lecture 10: Images as vectors. Appearance-based models. News Assignment 1 parts 3&4 extension. Due tomorrow, Tuesday, 10/6 at 11am. Goals Images
Introduction to Computer Vision Michael J. Black Oct. 2009 Lecture 10: Images as vectors. Appearance-based models. News Assignment 1 parts 3&4 extension. Due tomorrow, Tuesday, 10/6 at 11am. Goals Images
Blobs & Scale Invariance
 Blobs & Scale Invariance Prof. Didier Stricker Doz. Gabriele Bleser Computer Vision: Object and People Tracking With slides from Bebis, S. Lazebnik & S. Seitz, D. Lowe, A. Efros 1 Apertizer: some videos
Blobs & Scale Invariance Prof. Didier Stricker Doz. Gabriele Bleser Computer Vision: Object and People Tracking With slides from Bebis, S. Lazebnik & S. Seitz, D. Lowe, A. Efros 1 Apertizer: some videos
Computer Vision Lecture 3
 Computer Vision Lecture 3 Linear Filters 03.11.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Demo Haribo Classification Code available on the class website...
Computer Vision Lecture 3 Linear Filters 03.11.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Demo Haribo Classification Code available on the class website...
LoG Blob Finding and Scale. Scale Selection. Blobs (and scale selection) Achieving scale covariance. Blob detection in 2D. Blob detection in 2D
 Achieving scale covariance. Blob detection in 2D. Blob detection in 2D") Achieving scale covariance Blobs (and scale selection) Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region
Achieving scale covariance Blobs (and scale selection) Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region
Lecture 8: Interest Point Detection. Saad J Bedros
 #1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Review of Edge Detectors #2 Today s Lecture Interest Points Detection What do we mean with Interest Point Detection in an Image Goal:
#1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Review of Edge Detectors #2 Today s Lecture Interest Points Detection What do we mean with Interest Point Detection in an Image Goal:
Laplacian Filters. Sobel Filters. Laplacian Filters. Laplacian Filters. Laplacian Filters. Laplacian Filters
 Sobel Filters Note that smoothing the image before applying a Sobel filter typically gives better results. Even thresholding the Sobel filtered image cannot usually create precise, i.e., -pixel wide, edges.
Sobel Filters Note that smoothing the image before applying a Sobel filter typically gives better results. Even thresholding the Sobel filtered image cannot usually create precise, i.e., -pixel wide, edges.
Achieving scale covariance
 Achieving scale covariance Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region size that is covariant
Achieving scale covariance Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region size that is covariant
Review Smoothing Spatial Filters Sharpening Spatial Filters. Spatial Filtering. Dr. Praveen Sankaran. Department of ECE NIT Calicut.
 Spatial Filtering Dr. Praveen Sankaran Department of ECE NIT Calicut January 7, 203 Outline 2 Linear Nonlinear 3 Spatial Domain Refers to the image plane itself. Direct manipulation of image pixels. Figure:
Spatial Filtering Dr. Praveen Sankaran Department of ECE NIT Calicut January 7, 203 Outline 2 Linear Nonlinear 3 Spatial Domain Refers to the image plane itself. Direct manipulation of image pixels. Figure:
Advanced Features. Advanced Features: Topics. Jana Kosecka. Slides from: S. Thurn, D. Lowe, Forsyth and Ponce. Advanced features and feature matching
 Advanced Features Jana Kosecka Slides from: S. Thurn, D. Lowe, Forsyth and Ponce Advanced Features: Topics Advanced features and feature matching Template matching SIFT features Haar features 2 1 Features
Advanced Features Jana Kosecka Slides from: S. Thurn, D. Lowe, Forsyth and Ponce Advanced Features: Topics Advanced features and feature matching Template matching SIFT features Haar features 2 1 Features
CS4495/6495 Introduction to Computer Vision. 2A-L6 Edge detection: 2D operators
 CS4495/6495 Introduction to Computer Vision 2A-L6 Edge detection: 2D operators Derivative theorem of convolution - 1D This saves us one operation: ( ) ( ) x h f h f x f h h x h x ( ) f Derivative of Gaussian
CS4495/6495 Introduction to Computer Vision 2A-L6 Edge detection: 2D operators Derivative theorem of convolution - 1D This saves us one operation: ( ) ( ) x h f h f x f h h x h x ( ) f Derivative of Gaussian
Machine vision. Summary # 4. The mask for Laplacian is given
 1 Machine vision Summary # 4 The mask for Laplacian is given L = 0 1 0 1 4 1 (6) 0 1 0 Another Laplacian mask that gives more importance to the center element is L = 1 1 1 1 8 1 (7) 1 1 1 Note that the
1 Machine vision Summary # 4 The mask for Laplacian is given L = 0 1 0 1 4 1 (6) 0 1 0 Another Laplacian mask that gives more importance to the center element is L = 1 1 1 1 8 1 (7) 1 1 1 Note that the
CS4495/6495 Introduction to Computer Vision. 6B-L1 Dense flow: Brightness constraint
 CS4495/6495 Introduction to Computer Vision 6B-L1 Dense flow: Brightness constraint Motion estimation techniques Feature-based methods Direct, dense methods Motion estimation techniques Direct, dense methods
CS4495/6495 Introduction to Computer Vision 6B-L1 Dense flow: Brightness constraint Motion estimation techniques Feature-based methods Direct, dense methods Motion estimation techniques Direct, dense methods
Detectors part II Descriptors
 EECS 442 Computer vision Detectors part II Descriptors Blob detectors Invariance Descriptors Some slides of this lectures are courtesy of prof F. Li, prof S. Lazebnik, and various other lecturers Goal:
EECS 442 Computer vision Detectors part II Descriptors Blob detectors Invariance Descriptors Some slides of this lectures are courtesy of prof F. Li, prof S. Lazebnik, and various other lecturers Goal:
SIFT: Scale Invariant Feature Transform
 1 SIFT: Scale Invariant Feature Transform With slides from Sebastian Thrun Stanford CS223B Computer Vision, Winter 2006 3 Pattern Recognition Want to find in here SIFT Invariances: Scaling Rotation Illumination
1 SIFT: Scale Invariant Feature Transform With slides from Sebastian Thrun Stanford CS223B Computer Vision, Winter 2006 3 Pattern Recognition Want to find in here SIFT Invariances: Scaling Rotation Illumination
Machine vision, spring 2018 Summary 4
 Machine vision Summary # 4 The mask for Laplacian is given L = 4 (6) Another Laplacian mask that gives more importance to the center element is given by L = 8 (7) Note that the sum of the elements in the
Machine vision Summary # 4 The mask for Laplacian is given L = 4 (6) Another Laplacian mask that gives more importance to the center element is given by L = 8 (7) Note that the sum of the elements in the
Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems
 Robots for People --- A project for intelligent integrated systems") 1 Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems V. Estivill-Castro 2 Perception Concepts Vision Chapter 4 (textbook) Sections 4.3 to 4.5 What is the course
1 Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems V. Estivill-Castro 2 Perception Concepts Vision Chapter 4 (textbook) Sections 4.3 to 4.5 What is the course
I Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung University. Computer Vision: 4. Filtering
 I Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung University Computer Vision: 4. Filtering Outline Impulse response and convolution. Linear filter and image pyramid. Textbook: David A. Forsyth
I Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung University Computer Vision: 4. Filtering Outline Impulse response and convolution. Linear filter and image pyramid. Textbook: David A. Forsyth
Edge Detection in Computer Vision Systems
 1 CS332 Visual Processing in Computer and Biological Vision Systems Edge Detection in Computer Vision Systems This handout summarizes much of the material on the detection and description of intensity
1 CS332 Visual Processing in Computer and Biological Vision Systems Edge Detection in Computer Vision Systems This handout summarizes much of the material on the detection and description of intensity
Linear Diffusion. E9 242 STIP- R. Venkatesh Babu IISc
 Linear Diffusion Derivation of Heat equation Consider a 2D hot plate with Initial temperature profile I 0 (x, y) Uniform (isotropic) conduction coefficient c Unit thickness (along z) Problem: What is temperature
Linear Diffusion Derivation of Heat equation Consider a 2D hot plate with Initial temperature profile I 0 (x, y) Uniform (isotropic) conduction coefficient c Unit thickness (along z) Problem: What is temperature
Properties of detectors Edge detectors Harris DoG Properties of descriptors SIFT HOG Shape context
 Lecture 10 Detectors and descriptors Properties of detectors Edge detectors Harris DoG Properties of descriptors SIFT HOG Shape context Silvio Savarese Lecture 10-16-Feb-15 From the 3D to 2D & vice versa
Lecture 10 Detectors and descriptors Properties of detectors Edge detectors Harris DoG Properties of descriptors SIFT HOG Shape context Silvio Savarese Lecture 10-16-Feb-15 From the 3D to 2D & vice versa
Image Analysis. Feature extraction: corners and blobs
 Image Analysis Feature extraction: corners and blobs Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Svetlana Lazebnik, University of North Carolina at Chapel Hill (http://www.cs.unc.edu/~lazebnik/spring10/).
Image Analysis Feature extraction: corners and blobs Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Svetlana Lazebnik, University of North Carolina at Chapel Hill (http://www.cs.unc.edu/~lazebnik/spring10/).
Feature extraction: Corners and blobs
 Feature extraction: Corners and blobs Review: Linear filtering and edge detection Name two different kinds of image noise Name a non-linear smoothing filter What advantages does median filtering have over
Feature extraction: Corners and blobs Review: Linear filtering and edge detection Name two different kinds of image noise Name a non-linear smoothing filter What advantages does median filtering have over
Taking derivative by convolution
 Taking derivative by convolution Partial derivatives with convolution For 2D function f(x,y), the partial derivative is: For discrete data, we can approximate using finite differences: To implement above
Taking derivative by convolution Partial derivatives with convolution For 2D function f(x,y), the partial derivative is: For discrete data, we can approximate using finite differences: To implement above
CITS 4402 Computer Vision
 CITS 4402 Computer Vision Prof Ajmal Mian Adj/A/Prof Mehdi Ravanbakhsh, CEO at Mapizy (www.mapizy.com) and InFarm (www.infarm.io) Lecture 04 Greyscale Image Analysis Lecture 03 Summary Images as 2-D signals
CITS 4402 Computer Vision Prof Ajmal Mian Adj/A/Prof Mehdi Ravanbakhsh, CEO at Mapizy (www.mapizy.com) and InFarm (www.infarm.io) Lecture 04 Greyscale Image Analysis Lecture 03 Summary Images as 2-D signals
Advanced Edge Detection 1
 Advanced Edge Detection 1 Lecture 4 See Sections 2.4 and 1.2.5 in Reinhard Klette: Concise Computer Vision Springer-Verlag, London, 2014 1 See last slide for copyright information. 1 / 27 Agenda 1 LoG
Advanced Edge Detection 1 Lecture 4 See Sections 2.4 and 1.2.5 in Reinhard Klette: Concise Computer Vision Springer-Verlag, London, 2014 1 See last slide for copyright information. 1 / 27 Agenda 1 LoG
CS 3710: Visual Recognition Describing Images with Features. Adriana Kovashka Department of Computer Science January 8, 2015
 CS 3710: Visual Recognition Describing Images with Features Adriana Kovashka Department of Computer Science January 8, 2015 Plan for Today Presentation assignments + schedule changes Image filtering Feature
CS 3710: Visual Recognition Describing Images with Features Adriana Kovashka Department of Computer Science January 8, 2015 Plan for Today Presentation assignments + schedule changes Image filtering Feature
INTEREST POINTS AT DIFFERENT SCALES
 INTEREST POINTS AT DIFFERENT SCALES Thank you for the slides. They come mostly from the following sources. Dan Huttenlocher Cornell U David Lowe U. of British Columbia Martial Hebert CMU Intuitively, junctions
INTEREST POINTS AT DIFFERENT SCALES Thank you for the slides. They come mostly from the following sources. Dan Huttenlocher Cornell U David Lowe U. of British Columbia Martial Hebert CMU Intuitively, junctions
CS 534: Computer Vision Segmentation III Statistical Nonparametric Methods for Segmentation
 CS 534: Computer Vision Segmentation III Statistical Nonparametric Methods for Segmentation Ahmed Elgammal Dept of Computer Science CS 534 Segmentation III- Nonparametric Methods - - 1 Outlines Density
CS 534: Computer Vision Segmentation III Statistical Nonparametric Methods for Segmentation Ahmed Elgammal Dept of Computer Science CS 534 Segmentation III- Nonparametric Methods - - 1 Outlines Density
SIFT: SCALE INVARIANT FEATURE TRANSFORM BY DAVID LOWE
 SIFT: SCALE INVARIANT FEATURE TRANSFORM BY DAVID LOWE Overview Motivation of Work Overview of Algorithm Scale Space and Difference of Gaussian Keypoint Localization Orientation Assignment Descriptor Building
SIFT: SCALE INVARIANT FEATURE TRANSFORM BY DAVID LOWE Overview Motivation of Work Overview of Algorithm Scale Space and Difference of Gaussian Keypoint Localization Orientation Assignment Descriptor Building
The Frequency Domain : Computational Photography Alexei Efros, CMU, Fall Many slides borrowed from Steve Seitz
 The Frequency Domain 15-463: Computational Photography Alexei Efros, CMU, Fall 2008 Somewhere in Cinque Terre, May 2005 Many slides borrowed from Steve Seitz Salvador Dali Gala Contemplating the Mediterranean
The Frequency Domain 15-463: Computational Photography Alexei Efros, CMU, Fall 2008 Somewhere in Cinque Terre, May 2005 Many slides borrowed from Steve Seitz Salvador Dali Gala Contemplating the Mediterranean
Blob Detection CSC 767
 Blob Detection CSC 767 Blob detection Slides: S. Lazebnik Feature detection with scale selection We want to extract features with characteristic scale that is covariant with the image transformation Blob
Blob Detection CSC 767 Blob detection Slides: S. Lazebnik Feature detection with scale selection We want to extract features with characteristic scale that is covariant with the image transformation Blob
Analysis of Functions
 Lecture for Week 11 (Secs. 5.1 3) Analysis of Functions (We used to call this topic curve sketching, before students could sketch curves by typing formulas into their calculators. It is still important
Lecture for Week 11 (Secs. 5.1 3) Analysis of Functions (We used to call this topic curve sketching, before students could sketch curves by typing formulas into their calculators. It is still important
Harris Corner Detector
 Multimedia Computing: Algorithms, Systems, and Applications: Feature Extraction By Dr. Yu Cao Department of Computer Science The University of Massachusetts Lowell Lowell, MA 01854, USA Part of the slides
Multimedia Computing: Algorithms, Systems, and Applications: Feature Extraction By Dr. Yu Cao Department of Computer Science The University of Massachusetts Lowell Lowell, MA 01854, USA Part of the slides
Image preprocessing in spatial domain
 Image preprocessing in spatial domain Sharpening, image derivatives, Laplacian, edges Revision: 1.2, dated: May 25, 2007 Tomáš Svoboda Czech Technical University, Faculty of Electrical Engineering Center
Image preprocessing in spatial domain Sharpening, image derivatives, Laplacian, edges Revision: 1.2, dated: May 25, 2007 Tomáš Svoboda Czech Technical University, Faculty of Electrical Engineering Center
TRACKING and DETECTION in COMPUTER VISION Filtering and edge detection
 Technischen Universität München Winter Semester 0/0 TRACKING and DETECTION in COMPUTER VISION Filtering and edge detection Slobodan Ilić Overview Image formation Convolution Non-liner filtering: Median
Technischen Universität München Winter Semester 0/0 TRACKING and DETECTION in COMPUTER VISION Filtering and edge detection Slobodan Ilić Overview Image formation Convolution Non-liner filtering: Median
Scale & Affine Invariant Interest Point Detectors
 Scale & Affine Invariant Interest Point Detectors Krystian Mikolajczyk and Cordelia Schmid Presented by Hunter Brown & Gaurav Pandey, February 19, 2009 Roadmap: Motivation Scale Invariant Detector Affine
Scale & Affine Invariant Interest Point Detectors Krystian Mikolajczyk and Cordelia Schmid Presented by Hunter Brown & Gaurav Pandey, February 19, 2009 Roadmap: Motivation Scale Invariant Detector Affine
The Frequency Domain. Many slides borrowed from Steve Seitz
 The Frequency Domain Many slides borrowed from Steve Seitz Somewhere in Cinque Terre, May 2005 15-463: Computational Photography Alexei Efros, CMU, Spring 2010 Salvador Dali Gala Contemplating the Mediterranean
The Frequency Domain Many slides borrowed from Steve Seitz Somewhere in Cinque Terre, May 2005 15-463: Computational Photography Alexei Efros, CMU, Spring 2010 Salvador Dali Gala Contemplating the Mediterranean
Introduction to Computer Vision. 2D Linear Systems
 Introduction to Computer Vision D Linear Systems Review: Linear Systems We define a system as a unit that converts an input function into an output function Independent variable System operator or Transfer
Introduction to Computer Vision D Linear Systems Review: Linear Systems We define a system as a unit that converts an input function into an output function Independent variable System operator or Transfer
Additional Pointers. Introduction to Computer Vision. Convolution. Area operations: Linear filtering
 Additional Pointers Introduction to Computer Vision CS / ECE 181B andout #4 : Available this afternoon Midterm: May 6, 2004 W #2 due tomorrow Ack: Prof. Matthew Turk for the lecture slides. See my ECE
Additional Pointers Introduction to Computer Vision CS / ECE 181B andout #4 : Available this afternoon Midterm: May 6, 2004 W #2 due tomorrow Ack: Prof. Matthew Turk for the lecture slides. See my ECE
ECE Digital Image Processing and Introduction to Computer Vision
 ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 2017 Outline Recap, image degradation / restoration Template
ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 2017 Outline Recap, image degradation / restoration Template
Lecture 7: Finding Features (part 2/2)
") Lecture 7: Finding Features (part 2/2) Dr. Juan Carlos Niebles Stanford AI Lab Professor Fei- Fei Li Stanford Vision Lab 1 What we will learn today? Local invariant features MoPvaPon Requirements, invariances
Lecture 7: Finding Features (part 2/2) Dr. Juan Carlos Niebles Stanford AI Lab Professor Fei- Fei Li Stanford Vision Lab 1 What we will learn today? Local invariant features MoPvaPon Requirements, invariances
Scale & Affine Invariant Interest Point Detectors
 Scale & Affine Invariant Interest Point Detectors KRYSTIAN MIKOLAJCZYK AND CORDELIA SCHMID [2004] Shreyas Saxena Gurkirit Singh 23/11/2012 Introduction We are interested in finding interest points. What
Scale & Affine Invariant Interest Point Detectors KRYSTIAN MIKOLAJCZYK AND CORDELIA SCHMID [2004] Shreyas Saxena Gurkirit Singh 23/11/2012 Introduction We are interested in finding interest points. What
Thinking in Frequency
 09/05/17 Thinking in Frequency Computational Photography University of Illinois Derek Hoiem Administrative Matlab/linear algebra tutorial tomorrow, planned for 6:30pm Probably 1214 DCL (will send confirmation
09/05/17 Thinking in Frequency Computational Photography University of Illinois Derek Hoiem Administrative Matlab/linear algebra tutorial tomorrow, planned for 6:30pm Probably 1214 DCL (will send confirmation
SIFT keypoint detection. D. Lowe, Distinctive image features from scale-invariant keypoints, IJCV 60 (2), pp , 2004.
, pp , 2004.") SIFT keypoint detection D. Lowe, Distinctive image features from scale-invariant keypoints, IJCV 60 (), pp. 91-110, 004. Keypoint detection with scale selection We want to extract keypoints with characteristic
SIFT keypoint detection D. Lowe, Distinctive image features from scale-invariant keypoints, IJCV 60 (), pp. 91-110, 004. Keypoint detection with scale selection We want to extract keypoints with characteristic
Corners, Blobs & Descriptors. With slides from S. Lazebnik & S. Seitz, D. Lowe, A. Efros
 Corners, Blobs & Descriptors With slides from S. Lazebnik & S. Seitz, D. Lowe, A. Efros Motivation: Build a Panorama M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 How do we build panorama?
Corners, Blobs & Descriptors With slides from S. Lazebnik & S. Seitz, D. Lowe, A. Efros Motivation: Build a Panorama M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 How do we build panorama?
Fourier Analysis and Imaging Ronald Bracewell L.M. Terman Professor of Electrical Engineering Emeritus Stanford University Stanford, California
 Fourier Analysis and Imaging Ronald Bracewell L.M. Terman Professor of Electrical Engineering Emeritus Stanford University Stanford, California 4u Springer Contents fa 1 PREFACE INTRODUCTION xiii 1 11
Fourier Analysis and Imaging Ronald Bracewell L.M. Terman Professor of Electrical Engineering Emeritus Stanford University Stanford, California 4u Springer Contents fa 1 PREFACE INTRODUCTION xiii 1 11
Digital Image Processing ERRATA. Wilhelm Burger Mark J. Burge. An algorithmic introduction using Java. Second Edition. Springer
 Wilhelm Burger Mark J. Burge Digital Image Processing An algorithmic introduction using Java Second Edition ERRATA Springer Berlin Heidelberg NewYork Hong Kong London Milano Paris Tokyo 5 Filters K K No
Wilhelm Burger Mark J. Burge Digital Image Processing An algorithmic introduction using Java Second Edition ERRATA Springer Berlin Heidelberg NewYork Hong Kong London Milano Paris Tokyo 5 Filters K K No
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely Lecture 5: Feature descriptors and matching Szeliski: 4.1 Reading Announcements Project 1 Artifacts due tomorrow, Friday 2/17, at 11:59pm Project 2 will be released
CS5670: Computer Vision Noah Snavely Lecture 5: Feature descriptors and matching Szeliski: 4.1 Reading Announcements Project 1 Artifacts due tomorrow, Friday 2/17, at 11:59pm Project 2 will be released
Today s lecture. Local neighbourhood processing. The convolution. Removing uncorrelated noise from an image The Fourier transform
 Cris Luengo TD396 fall 4 cris@cbuuse Today s lecture Local neighbourhood processing smoothing an image sharpening an image The convolution What is it? What is it useful for? How can I compute it? Removing
Cris Luengo TD396 fall 4 cris@cbuuse Today s lecture Local neighbourhood processing smoothing an image sharpening an image The convolution What is it? What is it useful for? How can I compute it? Removing
Colorado School of Mines Image and Multidimensional Signal Processing
 Image and Multidimensional Signal Processing Professor William Hoff Department of Electrical Engineering and Computer Science Spatial Filtering Main idea Spatial filtering Define a neighborhood of a pixel
Image and Multidimensional Signal Processing Professor William Hoff Department of Electrical Engineering and Computer Science Spatial Filtering Main idea Spatial filtering Define a neighborhood of a pixel
Digital Image Processing: Sharpening Filtering in Spatial Domain CSC Biomedical Imaging and Analysis Dr. Kazunori Okada
 Homework Exercise Start project coding work according to the project plan Adjust project plans according to my comments (reply ilearn threads) New Exercise: Install VTK & FLTK. Find a simple hello world
Homework Exercise Start project coding work according to the project plan Adjust project plans according to my comments (reply ilearn threads) New Exercise: Install VTK & FLTK. Find a simple hello world
Computational Photography
 Computational Photography Si Lu Spring 208 http://web.cecs.pdx.edu/~lusi/cs50/cs50_computati onal_photography.htm 04/0/208 Last Time o Digital Camera History of Camera Controlling Camera o Photography
Computational Photography Si Lu Spring 208 http://web.cecs.pdx.edu/~lusi/cs50/cs50_computati onal_photography.htm 04/0/208 Last Time o Digital Camera History of Camera Controlling Camera o Photography
Local Enhancement. Local enhancement
 Local Enhancement Local Enhancement Median filtering (see notes/slides, 3.5.2) HW4 due next Wednesday Required Reading: Sections 3.3, 3.4, 3.5, 3.6, 3.7 Local Enhancement 1 Local enhancement Sometimes
Local Enhancement Local Enhancement Median filtering (see notes/slides, 3.5.2) HW4 due next Wednesday Required Reading: Sections 3.3, 3.4, 3.5, 3.6, 3.7 Local Enhancement 1 Local enhancement Sometimes
Lecture 7: Finding Features (part 2/2)
") Lecture 7: Finding Features (part 2/2) Professor Fei- Fei Li Stanford Vision Lab Lecture 7 -! 1 What we will learn today? Local invariant features MoHvaHon Requirements, invariances Keypoint localizahon
Lecture 7: Finding Features (part 2/2) Professor Fei- Fei Li Stanford Vision Lab Lecture 7 -! 1 What we will learn today? Local invariant features MoHvaHon Requirements, invariances Keypoint localizahon
Computer Vision & Digital Image Processing
 Computer Vision & Digital Image Processing Image Segmentation Dr. D. J. Jackson Lecture 6- Image segmentation Segmentation divides an image into its constituent parts or objects Level of subdivision depends
Computer Vision & Digital Image Processing Image Segmentation Dr. D. J. Jackson Lecture 6- Image segmentation Segmentation divides an image into its constituent parts or objects Level of subdivision depends
Feature detectors and descriptors. Fei-Fei Li
 Feature detectors and descriptors Fei-Fei Li Feature Detection e.g. DoG detected points (~300) coordinates, neighbourhoods Feature Description e.g. SIFT local descriptors (invariant) vectors database of
Feature detectors and descriptors Fei-Fei Li Feature Detection e.g. DoG detected points (~300) coordinates, neighbourhoods Feature Description e.g. SIFT local descriptors (invariant) vectors database of
Image Enhancement: Methods. Digital Image Processing. No Explicit definition. Spatial Domain: Frequency Domain:
 Image Enhancement: No Explicit definition Methods Spatial Domain: Linear Nonlinear Frequency Domain: Linear Nonlinear 1 Spatial Domain Process,, g x y T f x y 2 For 1 1 neighborhood: Contrast Enhancement/Stretching/Point
Image Enhancement: No Explicit definition Methods Spatial Domain: Linear Nonlinear Frequency Domain: Linear Nonlinear 1 Spatial Domain Process,, g x y T f x y 2 For 1 1 neighborhood: Contrast Enhancement/Stretching/Point
Total Variation Image Edge Detection
 Total Variation Image Edge Detection PETER NDAJAH Graduate School of Science and Technology, Niigata University, 8050, Ikarashi 2-no-cho, Nishi-ku, Niigata, 950-28, JAPAN ndajah@telecom0.eng.niigata-u.ac.jp
Total Variation Image Edge Detection PETER NDAJAH Graduate School of Science and Technology, Niigata University, 8050, Ikarashi 2-no-cho, Nishi-ku, Niigata, 950-28, JAPAN ndajah@telecom0.eng.niigata-u.ac.jp
Scale-space image processing
 Scale-space image processing Corresponding image features can appear at different scales Like shift-invariance, scale-invariance of image processing algorithms is often desirable. Scale-space representation
Scale-space image processing Corresponding image features can appear at different scales Like shift-invariance, scale-invariance of image processing algorithms is often desirable. Scale-space representation
Feature detectors and descriptors. Fei-Fei Li
 Feature detectors and descriptors Fei-Fei Li Feature Detection e.g. DoG detected points (~300) coordinates, neighbourhoods Feature Description e.g. SIFT local descriptors (invariant) vectors database of
Feature detectors and descriptors Fei-Fei Li Feature Detection e.g. DoG detected points (~300) coordinates, neighbourhoods Feature Description e.g. SIFT local descriptors (invariant) vectors database of
Lucas-Kanade Optical Flow. Computer Vision Carnegie Mellon University (Kris Kitani)
") Lucas-Kanade Optical Flow Computer Vision 16-385 Carnegie Mellon University (Kris Kitani) I x u + I y v + I t =0 I x = @I @x I y = @I u = dx v = dy I @y t = @I dt dt @t spatial derivative optical flow
Lucas-Kanade Optical Flow Computer Vision 16-385 Carnegie Mellon University (Kris Kitani) I x u + I y v + I t =0 I x = @I @x I y = @I u = dx v = dy I @y t = @I dt dt @t spatial derivative optical flow
Image Enhancement in the frequency domain. Inel 5046 Prof. Vidya Manian
 Image Enhancement in the frequency domain Inel 5046 Prof. Vidya Manian Introduction 2D Fourier transform Basics of filtering in frequency domain Ideal low pass filter Gaussian low pass filter Ideal high
Image Enhancement in the frequency domain Inel 5046 Prof. Vidya Manian Introduction 2D Fourier transform Basics of filtering in frequency domain Ideal low pass filter Gaussian low pass filter Ideal high
Corner detection: the basic idea
 Corner detection: the basic idea At a corner, shifting a window in any direction should give a large change in intensity flat region: no change in all directions edge : no change along the edge direction
Corner detection: the basic idea At a corner, shifting a window in any direction should give a large change in intensity flat region: no change in all directions edge : no change along the edge direction
Announcements. Filtering. Image Filtering. Linear Filters. Example: Smoothing by Averaging. Homework 2 is due Apr 26, 11:59 PM Reading:
 Announcements Filtering Homework 2 is due Apr 26, :59 PM eading: Chapter 4: Linear Filters CSE 52 Lecture 6 mage Filtering nput Output Filter (From Bill Freeman) Example: Smoothing by Averaging Linear
Announcements Filtering Homework 2 is due Apr 26, :59 PM eading: Chapter 4: Linear Filters CSE 52 Lecture 6 mage Filtering nput Output Filter (From Bill Freeman) Example: Smoothing by Averaging Linear
Numerical Methods in TEM Convolution and Deconvolution
 Numerical Methods in TEM Convolution and Deconvolution Christoph T. Koch Max Planck Institut für Metallforschung http://hrem.mpi-stuttgart.mpg.de/koch/vorlesung Applications of Convolution in TEM Smoothing
Numerical Methods in TEM Convolution and Deconvolution Christoph T. Koch Max Planck Institut für Metallforschung http://hrem.mpi-stuttgart.mpg.de/koch/vorlesung Applications of Convolution in TEM Smoothing
Local enhancement. Local Enhancement. Local histogram equalized. Histogram equalized. Local Contrast Enhancement. Fig 3.23: Another example
 Local enhancement Local Enhancement Median filtering Local Enhancement Sometimes Local Enhancement is Preferred. Malab: BlkProc operation for block processing. Left: original tire image. 0/07/00 Local
Local enhancement Local Enhancement Median filtering Local Enhancement Sometimes Local Enhancement is Preferred. Malab: BlkProc operation for block processing. Left: original tire image. 0/07/00 Local
CS 556: Computer Vision. Lecture 21
 CS 556: Computer Vision Lecture 21 Prof. Sinisa Todorovic sinisa@eecs.oregonstate.edu 1 Meanshift 2 Meanshift Clustering Assumption: There is an underlying pdf governing data properties in R Clustering
CS 556: Computer Vision Lecture 21 Prof. Sinisa Todorovic sinisa@eecs.oregonstate.edu 1 Meanshift 2 Meanshift Clustering Assumption: There is an underlying pdf governing data properties in R Clustering
Mixture Models and EM
 Mixture Models and EM Goal: Introduction to probabilistic mixture models and the expectationmaximization (EM) algorithm. Motivation: simultaneous fitting of multiple model instances unsupervised clustering
Mixture Models and EM Goal: Introduction to probabilistic mixture models and the expectationmaximization (EM) algorithm. Motivation: simultaneous fitting of multiple model instances unsupervised clustering
Image enhancement. Why image enhancement? Why image enhancement? Why image enhancement? Example of artifacts caused by image encoding
 13 Why image enhancement? Image enhancement Example of artifacts caused by image encoding Computer Vision, Lecture 14 Michael Felsberg Computer Vision Laboratory Department of Electrical Engineering 12
13 Why image enhancement? Image enhancement Example of artifacts caused by image encoding Computer Vision, Lecture 14 Michael Felsberg Computer Vision Laboratory Department of Electrical Engineering 12
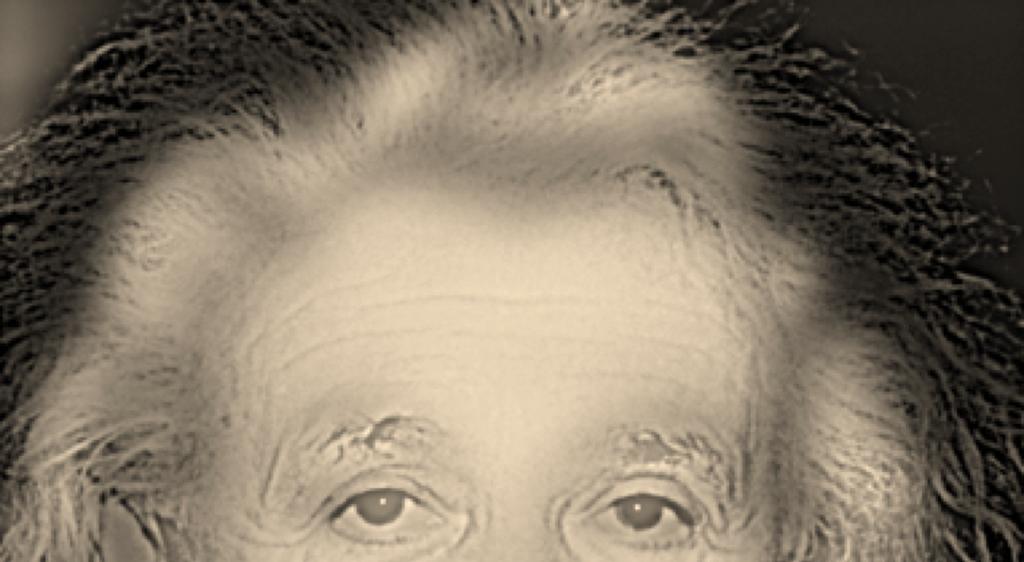
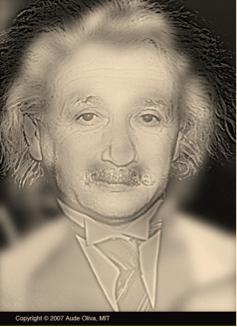
Why does a lower resolution image still make sense to us? What do we lose? Image:
 2D FREQUENCY DOMAIN The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their
2D FREQUENCY DOMAIN The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their
Image Filtering, Edges and Image Representation
 Image Filtering, Edges and Image Representation Capturing what s important Req reading: Chapter 7, 9 F&P Adelson, Simoncelli and Freeman (handout online) Opt reading: Horn 7 & 8 FP 8 February 19, 8 A nice
Image Filtering, Edges and Image Representation Capturing what s important Req reading: Chapter 7, 9 F&P Adelson, Simoncelli and Freeman (handout online) Opt reading: Horn 7 & 8 FP 8 February 19, 8 A nice
Vectors [and more on masks] Vector space theory applies directly to several image processing/ representation problems
![Vectors [and more on masks] Vector space theory applies directly to several image processing/ representation problems](/thumbs/74/71250091.jpg "Vectors [and more on masks] Vector space theory applies directly to several image processing/ representation problems") Vectors [and more on masks] Vector space theory applies directly to several image processing/ representation problems 1 Image as a sum of basic images What if every person s portrait photo could be expressed
Vectors [and more on masks] Vector space theory applies directly to several image processing/ representation problems 1 Image as a sum of basic images What if every person s portrait photo could be expressed
Edge Detection. Image Processing - Computer Vision
 Image Processing - Lesson 10 Edge Detection Image Processing - Computer Vision Low Level Edge detection masks Gradient Detectors Compass Detectors Second Derivative - Laplace detectors Edge Linking Image
Image Processing - Lesson 10 Edge Detection Image Processing - Computer Vision Low Level Edge detection masks Gradient Detectors Compass Detectors Second Derivative - Laplace detectors Edge Linking Image
Computer Vision Lecture 3
 Demo Haribo Classification Computer Vision Lecture 3 Linear Filters 23..24 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Code available on the class website...
Demo Haribo Classification Computer Vision Lecture 3 Linear Filters 23..24 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Code available on the class website...
Roadmap. Introduction to image analysis (computer vision) Theory of edge detection. Applications
 Theory of edge detection. Applications") Edge Detection Roadmap Introduction to image analysis (computer vision) Its connection with psychology and neuroscience Why is image analysis difficult? Theory of edge detection Gradient operator Advanced
Edge Detection Roadmap Introduction to image analysis (computer vision) Its connection with psychology and neuroscience Why is image analysis difficult? Theory of edge detection Gradient operator Advanced
Gradient Descent and Implementation Solving the Euler-Lagrange Equations in Practice
 1 Lecture Notes, HCI, 4.1.211 Chapter 2 Gradient Descent and Implementation Solving the Euler-Lagrange Equations in Practice Bastian Goldlücke Computer Vision Group Technical University of Munich 2 Bastian
1 Lecture Notes, HCI, 4.1.211 Chapter 2 Gradient Descent and Implementation Solving the Euler-Lagrange Equations in Practice Bastian Goldlücke Computer Vision Group Technical University of Munich 2 Bastian
Multiscale Image Transforms
 Multiscale Image Transforms Goal: Develop filter-based representations to decompose images into component parts, to extract features/structures of interest, and to attenuate noise. Motivation: extract
Multiscale Image Transforms Goal: Develop filter-based representations to decompose images into component parts, to extract features/structures of interest, and to attenuate noise. Motivation: extract
Subsampling and image pyramids
 Subsampling and image pyramids http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 3 Course announcements Homework 0 and homework 1 will be posted tonight. - Homework 0 is not required
Subsampling and image pyramids http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 3 Course announcements Homework 0 and homework 1 will be posted tonight. - Homework 0 is not required
Extract useful building blocks: blobs. the same image like for the corners
 Extract useful building blocks: blobs the same image like for the corners Here were the corners... Blob detection in 2D Laplacian of Gaussian: Circularly symmetric operator for blob detection in 2D 2 g=
Extract useful building blocks: blobs the same image like for the corners Here were the corners... Blob detection in 2D Laplacian of Gaussian: Circularly symmetric operator for blob detection in 2D 2 g=
A Novel Method for Generating Scale Space Kernels Based on Wavelet Theory
 A Novel Method for Generating Scale Space Kernels Based on Wavelet Theory Dionísio Doering1 Adalberto Schuck Júnior Abstract: The linear scale-space kernel is a Gaussian or Poisson function. These functions
A Novel Method for Generating Scale Space Kernels Based on Wavelet Theory Dionísio Doering1 Adalberto Schuck Júnior Abstract: The linear scale-space kernel is a Gaussian or Poisson function. These functions
Advances in Computer Vision. Prof. Bill Freeman. Image and shape descriptors. Readings: Mikolajczyk and Schmid; Belongie et al.
 6.869 Advances in Computer Vision Prof. Bill Freeman March 3, 2005 Image and shape descriptors Affine invariant features Comparison of feature descriptors Shape context Readings: Mikolajczyk and Schmid;
6.869 Advances in Computer Vision Prof. Bill Freeman March 3, 2005 Image and shape descriptors Affine invariant features Comparison of feature descriptors Shape context Readings: Mikolajczyk and Schmid;