Image Stitching II. Linda Shapiro CSE 455
|
|
|
- Erik Ramsey
- 5 years ago
- Views:
Transcription
1 Image Stitching II Linda Shapiro CSE 455


2 RANSAC for Homography Initial Matched Points
3 RANSAC for Homography Final Matched Points

4 RANSAC for Homography


5 Image Blending What s wrong?


6 Feathering =
7 Effect of window (ramp-width) size 1 left 1 0 right 0
8 Effect of window size

9 Good window size 1 Optimal window: smooth but not ghosted Doesn t always work... 0 What can we do instead?


, October 1983, 217-236.")
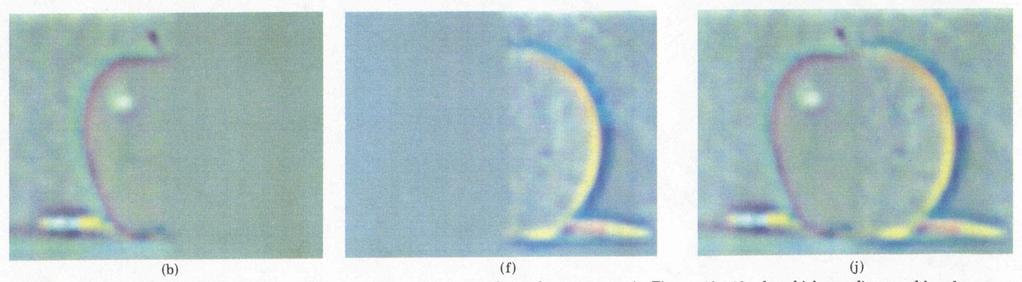
10 Pyramid blending apple orange Create a Laplacian pyramid, blend each level Burt, P. J. and Adelson, E. H., A Multiresolution Spline with Application to Image Mosaics, ACM Transactions on Graphics, 42(4), October 1983,
11 Forming a Gaussian Pyramid Start with the original image G 0 Perform a local Gaussian weighted averaging function in a neighborhood about each pixel, sampling so that the result is a reduced image of half the size in each dimension. Do this all the way up the pyramid G l = REDUCE(G l-1 ) Each level l node will represent a weighted average of a subarray of level l.
12 Making the Laplacians We want to subtract each level of the pyramid from the next lower one. But they are different sizes! In order to do the subtraction, we perform an interpolation process. We interpolate new samples between those of a given image to make it big enough to subtract. The operation is called EXPAND.



13 The Laplacian Pyramid L i = Gi i+ expand( G 1 ) Gaussian Pyramid Laplacian Pyramid G 2 G n L n = G n - = L2 G 1 - = L 1 G 0 L 0 - =




14 To blend two images, We ll combine two Laplacian pyramids Laplacian Pyramid LA Laplacian Pyramid LS Laplacian Pyramid LB to be filled in
15 Forming the New Pyramid Laplacian pyramids LB and LB are constructed for images A and B, respectively. A third Laplacian pyramid LS is constructed by copying nodes from the left half of LA to the corresponding nodes of LS and nodes from the right half of LB to the right half of LS. Nodes along the center line are set equal to the average of corresponding LA and LB nodes
16 Using the new Laplacian Pyramid Use the new Laplacian pyramid with the reverse of how it was created to create a Gaussian pyramid. G i = Li i+ + expand( G ) 1 The lowest level of the new Gaussian pyramid gives the final result.


17 Laplacian level 4 Laplacian level 2 Laplacian level 0 left pyramid right pyramid blended pyramid

18 Multiband blending (IJCV 2007) Laplacian pyramids 1. Compute Laplacian pyramid of images and mask 2. Create blended image at each level of pyramid 3. Reconstruct complete image

19 Blending comparison (IJCV 2007)

20 Poisson Image Editing For more info: Perez et al, SIGGRAPH
21 Alpha Blending I 3 p I 1 I 2 Optional: see Blinn (CGA, 1994) for details: =7531&prod=JNL&arnumber=310740&arSt=83&ared=87&arAu hor=blinn%2c+j.f. Encoding blend weights: I(x,y) = (αr, αg, αb, α ) color at p = Implement this in two steps: 1. accumulate: add up the (α premultiplied) RGB values at each pixel 2. normalize: divide each pixel s accumulated RGB by its α value
22 Choosing Seams: Where do we stitch? Easy method Assign each pixel to image with nearest center im1 im2 x x Image 2 Image 1
23 Choosing seams Easy method Assign each pixel to image with nearest center Create a mask: Smooth boundaries ( feathering ): Composite im1 im2 x x Image 2 Image 1

24 Choosing seams Better method: dynamic program to find seam along well-matched regions Illustration:




25 Gain Compensation: Getting rid of artifacts Simple gain adjustment Compute average RGB intensity of each image in overlapping region Normalize intensities by ratio of averages
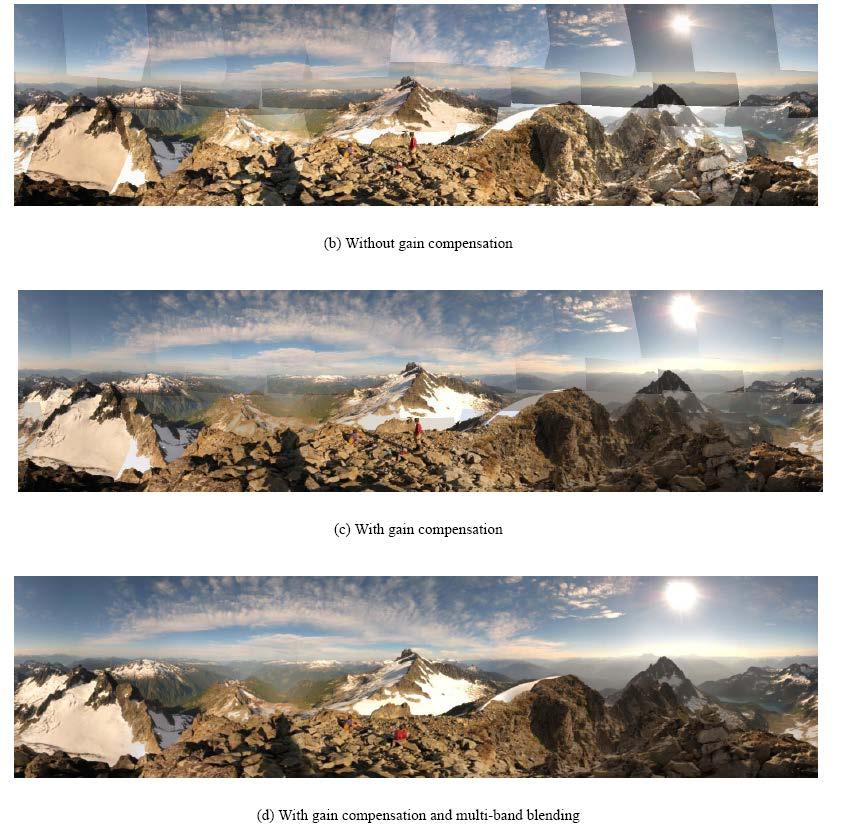
26 Blending Comparison
27 Recognizing Panoramas Some of following material from Brown and Lowe 2003 talk Brown and Lowe 2003, 2007
28 Recognizing Panoramas Input: N images 1. Extract SIFT points, descriptors from all images 2. Find K-nearest neighbors for each point (K=4) 3. For each image a) Select M candidate matching images by counting matched keypoints (m=6) b) Solve homography H ij for each matched image
29 Recognizing Panoramas Input: N images 1. Extract SIFT points, descriptors from all images 2. Find K-nearest neighbors for each point (K=4) 3. For each image a) Select M candidate matching images by counting matched keypoints (m=6) b) Solve homography H ij for each matched image c) Decide if match is valid (n i > n f ) # inliers # keypoints in overlapping area
30 Recognizing Panoramas (cont.) (now we have matched pairs of images) 4. Make a graph of matched pairs Find connected components of the graph
31 Finding the panoramas
32 Finding the panoramas
33 Recognizing Panoramas (cont.) (now we have matched pairs of images) 4. Find connected components 5. For each connected component a) Solve for rotation and f b) Project to a surface (plane, cylinder, or sphere) c) Render with multiband blending

34 Finding the panoramas
Image Stitching II. Linda Shapiro EE/CSE 576
 Image Stitching II Linda Shapiro EE/CSE 576 RANSAC for Homography Initial Matched Points RANSAC for Homography Final Matched Points RANSAC for Homography Image Blending What s wrong? Feathering + 1 0 ramp
Image Stitching II Linda Shapiro EE/CSE 576 RANSAC for Homography Initial Matched Points RANSAC for Homography Final Matched Points RANSAC for Homography Image Blending What s wrong? Feathering + 1 0 ramp
Image Alignment and Mosaicing
 Image Alignment and Mosaicing Image Alignment Applications Local alignment: Tracking Stereo Global alignment: Camera jitter elimination Image enhancement Panoramic mosaicing Image Enhancement Original
Image Alignment and Mosaicing Image Alignment Applications Local alignment: Tracking Stereo Global alignment: Camera jitter elimination Image enhancement Panoramic mosaicing Image Enhancement Original
ECE Digital Image Processing and Introduction to Computer Vision
 ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 2017 Outline Recap, image degradation / restoration Template
ECE592-064 Digital Image Processing and Introduction to Computer Vision Depart. of ECE, NC State University Instructor: Tianfu (Matt) Wu Spring 2017 Outline Recap, image degradation / restoration Template
Lecture 8: Interest Point Detection. Saad J Bedros
 #1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Review of Edge Detectors #2 Today s Lecture Interest Points Detection What do we mean with Interest Point Detection in an Image Goal:
#1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Review of Edge Detectors #2 Today s Lecture Interest Points Detection What do we mean with Interest Point Detection in an Image Goal:
Edges and Scale. Image Features. Detecting edges. Origin of Edges. Solution: smooth first. Effects of noise
 Edges and Scale Image Features From Sandlot Science Slides revised from S. Seitz, R. Szeliski, S. Lazebnik, etc. Origin of Edges surface normal discontinuity depth discontinuity surface color discontinuity
Edges and Scale Image Features From Sandlot Science Slides revised from S. Seitz, R. Szeliski, S. Lazebnik, etc. Origin of Edges surface normal discontinuity depth discontinuity surface color discontinuity
Image Filtering. Slides, adapted from. Steve Seitz and Rick Szeliski, U.Washington
 Image Filtering Slides, adapted from Steve Seitz and Rick Szeliski, U.Washington The power of blur All is Vanity by Charles Allen Gillbert (1873-1929) Harmon LD & JuleszB (1973) The recognition of faces.
Image Filtering Slides, adapted from Steve Seitz and Rick Szeliski, U.Washington The power of blur All is Vanity by Charles Allen Gillbert (1873-1929) Harmon LD & JuleszB (1973) The recognition of faces.
The Frequency Domain, without tears. Many slides borrowed from Steve Seitz
 The Frequency Domain, without tears Many slides borrowed from Steve Seitz Somewhere in Cinque Terre, May 2005 CS194: Image Manipulation & Computational Photography Alexei Efros, UC Berkeley, Fall 2016
The Frequency Domain, without tears Many slides borrowed from Steve Seitz Somewhere in Cinque Terre, May 2005 CS194: Image Manipulation & Computational Photography Alexei Efros, UC Berkeley, Fall 2016
Multiscale Image Transforms
 Multiscale Image Transforms Goal: Develop filter-based representations to decompose images into component parts, to extract features/structures of interest, and to attenuate noise. Motivation: extract
Multiscale Image Transforms Goal: Develop filter-based representations to decompose images into component parts, to extract features/structures of interest, and to attenuate noise. Motivation: extract
CS 3710: Visual Recognition Describing Images with Features. Adriana Kovashka Department of Computer Science January 8, 2015
 CS 3710: Visual Recognition Describing Images with Features Adriana Kovashka Department of Computer Science January 8, 2015 Plan for Today Presentation assignments + schedule changes Image filtering Feature
CS 3710: Visual Recognition Describing Images with Features Adriana Kovashka Department of Computer Science January 8, 2015 Plan for Today Presentation assignments + schedule changes Image filtering Feature
6.869 Advances in Computer Vision. Bill Freeman, Antonio Torralba and Phillip Isola MIT Oct. 3, 2018
 6.869 Advances in Computer Vision Bill Freeman, Antonio Torralba and Phillip Isola MIT Oct. 3, 2018 1 Sampling Sampling Pixels Continuous world 3 Sampling 4 Sampling 5 Continuous image f (x, y) Sampling
6.869 Advances in Computer Vision Bill Freeman, Antonio Torralba and Phillip Isola MIT Oct. 3, 2018 1 Sampling Sampling Pixels Continuous world 3 Sampling 4 Sampling 5 Continuous image f (x, y) Sampling
LoG Blob Finding and Scale. Scale Selection. Blobs (and scale selection) Achieving scale covariance. Blob detection in 2D. Blob detection in 2D
 Achieving scale covariance. Blob detection in 2D. Blob detection in 2D") Achieving scale covariance Blobs (and scale selection) Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region
Achieving scale covariance Blobs (and scale selection) Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region
Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems
 Robots for People --- A project for intelligent integrated systems") 1 Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems V. Estivill-Castro 2 Perception Concepts Vision Chapter 4 (textbook) Sections 4.3 to 4.5 What is the course
1 Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems V. Estivill-Castro 2 Perception Concepts Vision Chapter 4 (textbook) Sections 4.3 to 4.5 What is the course
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely Lecture 5: Feature descriptors and matching Szeliski: 4.1 Reading Announcements Project 1 Artifacts due tomorrow, Friday 2/17, at 11:59pm Project 2 will be released
CS5670: Computer Vision Noah Snavely Lecture 5: Feature descriptors and matching Szeliski: 4.1 Reading Announcements Project 1 Artifacts due tomorrow, Friday 2/17, at 11:59pm Project 2 will be released
Achieving scale covariance
 Achieving scale covariance Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region size that is covariant
Achieving scale covariance Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region size that is covariant
Image matching. by Diva Sian. by swashford
 Image matching by Diva Sian by swashford Harder case by Diva Sian by scgbt Invariant local features Find features that are invariant to transformations geometric invariance: translation, rotation, scale
Image matching by Diva Sian by swashford Harder case by Diva Sian by scgbt Invariant local features Find features that are invariant to transformations geometric invariance: translation, rotation, scale
INTEREST POINTS AT DIFFERENT SCALES
 INTEREST POINTS AT DIFFERENT SCALES Thank you for the slides. They come mostly from the following sources. Dan Huttenlocher Cornell U David Lowe U. of British Columbia Martial Hebert CMU Intuitively, junctions
INTEREST POINTS AT DIFFERENT SCALES Thank you for the slides. They come mostly from the following sources. Dan Huttenlocher Cornell U David Lowe U. of British Columbia Martial Hebert CMU Intuitively, junctions
Lecture 8: Interest Point Detection. Saad J Bedros
 #1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Last Lecture : Edge Detection Preprocessing of image is desired to eliminate or at least minimize noise effects There is always tradeoff
#1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Last Lecture : Edge Detection Preprocessing of image is desired to eliminate or at least minimize noise effects There is always tradeoff
CSE 473/573 Computer Vision and Image Processing (CVIP)
") CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Lecture 11 Local Features 1 Schedule Last class We started local features Today More on local features Readings for
CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Lecture 11 Local Features 1 Schedule Last class We started local features Today More on local features Readings for
Blobs & Scale Invariance
 Blobs & Scale Invariance Prof. Didier Stricker Doz. Gabriele Bleser Computer Vision: Object and People Tracking With slides from Bebis, S. Lazebnik & S. Seitz, D. Lowe, A. Efros 1 Apertizer: some videos
Blobs & Scale Invariance Prof. Didier Stricker Doz. Gabriele Bleser Computer Vision: Object and People Tracking With slides from Bebis, S. Lazebnik & S. Seitz, D. Lowe, A. Efros 1 Apertizer: some videos
Scale-space image processing
 Scale-space image processing Corresponding image features can appear at different scales Like shift-invariance, scale-invariance of image processing algorithms is often desirable. Scale-space representation
Scale-space image processing Corresponding image features can appear at different scales Like shift-invariance, scale-invariance of image processing algorithms is often desirable. Scale-space representation
Lecture 12. Local Feature Detection. Matching with Invariant Features. Why extract features? Why extract features? Why extract features?
 Lecture 1 Why extract eatures? Motivation: panorama stitching We have two images how do we combine them? Local Feature Detection Guest lecturer: Alex Berg Reading: Harris and Stephens David Lowe IJCV We
Lecture 1 Why extract eatures? Motivation: panorama stitching We have two images how do we combine them? Local Feature Detection Guest lecturer: Alex Berg Reading: Harris and Stephens David Lowe IJCV We
Multiresolution image processing
 Multiresolution image processing Laplacian pyramids Some applications of Laplacian pyramids Discrete Wavelet Transform (DWT) Wavelet theory Wavelet image compression Bernd Girod: EE368 Digital Image Processing
Multiresolution image processing Laplacian pyramids Some applications of Laplacian pyramids Discrete Wavelet Transform (DWT) Wavelet theory Wavelet image compression Bernd Girod: EE368 Digital Image Processing
Advances in Computer Vision. Prof. Bill Freeman. Image and shape descriptors. Readings: Mikolajczyk and Schmid; Belongie et al.
 6.869 Advances in Computer Vision Prof. Bill Freeman March 3, 2005 Image and shape descriptors Affine invariant features Comparison of feature descriptors Shape context Readings: Mikolajczyk and Schmid;
6.869 Advances in Computer Vision Prof. Bill Freeman March 3, 2005 Image and shape descriptors Affine invariant features Comparison of feature descriptors Shape context Readings: Mikolajczyk and Schmid;
Corners, Blobs & Descriptors. With slides from S. Lazebnik & S. Seitz, D. Lowe, A. Efros
 Corners, Blobs & Descriptors With slides from S. Lazebnik & S. Seitz, D. Lowe, A. Efros Motivation: Build a Panorama M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 How do we build panorama?
Corners, Blobs & Descriptors With slides from S. Lazebnik & S. Seitz, D. Lowe, A. Efros Motivation: Build a Panorama M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 How do we build panorama?
Reprinted from Proceedings of the Pattern Recognition and Information Processing Conference (pp ), Dallas, TX (1981).
, Dallas, TX (1981).") Reprinted from Proceedings of the Pattern Recognition and Information Processing Conference (pp. 18-3), Dallas, TX (1981). IMAGE DATA COMPRESSION WITH THE LAPLACIAN PYRAMID* Edward H. Adelson Psychology
Reprinted from Proceedings of the Pattern Recognition and Information Processing Conference (pp. 18-3), Dallas, TX (1981). IMAGE DATA COMPRESSION WITH THE LAPLACIAN PYRAMID* Edward H. Adelson Psychology
Missing Data Interpolation with Gaussian Pyramids
 Stanford Exploration Project, Report 124, April 4, 2006, pages 33?? Missing Data Interpolation with Gaussian Pyramids Satyakee Sen ABSTRACT I describe a technique for interpolation of missing data in which
Stanford Exploration Project, Report 124, April 4, 2006, pages 33?? Missing Data Interpolation with Gaussian Pyramids Satyakee Sen ABSTRACT I describe a technique for interpolation of missing data in which
Review for Exam 1. Erik G. Learned-Miller Department of Computer Science University of Massachusetts, Amherst Amherst, MA
 Review for Exam Erik G. Learned-Miller Department of Computer Science University of Massachusetts, Amherst Amherst, MA 0003 March 26, 204 Abstract Here are some things you need to know for the in-class
Review for Exam Erik G. Learned-Miller Department of Computer Science University of Massachusetts, Amherst Amherst, MA 0003 March 26, 204 Abstract Here are some things you need to know for the in-class
Feature extraction: Corners and blobs
 Feature extraction: Corners and blobs Review: Linear filtering and edge detection Name two different kinds of image noise Name a non-linear smoothing filter What advantages does median filtering have over
Feature extraction: Corners and blobs Review: Linear filtering and edge detection Name two different kinds of image noise Name a non-linear smoothing filter What advantages does median filtering have over
Lecture 4.3 Estimating homographies from feature correspondences. Thomas Opsahl
 Lecture 4.3 Estimating homographies from feature correspondences Thomas Opsahl Homographies induced by central projection 1 H 2 1 H 2 u uu 2 3 1 Homography Hu = u H = h 1 h 2 h 3 h 4 h 5 h 6 h 7 h 8 h
Lecture 4.3 Estimating homographies from feature correspondences Thomas Opsahl Homographies induced by central projection 1 H 2 1 H 2 u uu 2 3 1 Homography Hu = u H = h 1 h 2 h 3 h 4 h 5 h 6 h 7 h 8 h
Subsampling and image pyramids
 Subsampling and image pyramids http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 3 Course announcements Homework 0 and homework 1 will be posted tonight. - Homework 0 is not required
Subsampling and image pyramids http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 3 Course announcements Homework 0 and homework 1 will be posted tonight. - Homework 0 is not required
EECS150 - Digital Design Lecture 15 SIFT2 + FSM. Recap and Outline
 EECS150 - Digital Design Lecture 15 SIFT2 + FSM Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
EECS150 - Digital Design Lecture 15 SIFT2 + FSM Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
Computer Vision, Laboratory session 2
 Centre for Mathematical Sciences, February 2011 Computer Vision, Laboratory session 2 In the first laboratory you downloaded datorsee.zip from the homepage: http://www.maths.lth.se/matematiklth/vision/datorsee
Centre for Mathematical Sciences, February 2011 Computer Vision, Laboratory session 2 In the first laboratory you downloaded datorsee.zip from the homepage: http://www.maths.lth.se/matematiklth/vision/datorsee
E27 SPRING 2015 ZUCKER PROJECT 2 LAPLACIAN PYRAMIDS AND IMAGE BLENDING
 E27 SPRING 2015 ZUCKER PROJECT 2 PROJECT 2 LAPLACIAN PYRAMIDS AND IMAGE BLENDING OVERVIEW In this project, you will investigate two applications: Laplacian pyramid blending and hybrid images. You can use
E27 SPRING 2015 ZUCKER PROJECT 2 PROJECT 2 LAPLACIAN PYRAMIDS AND IMAGE BLENDING OVERVIEW In this project, you will investigate two applications: Laplacian pyramid blending and hybrid images. You can use
Computer Vision Lecture 3
 Computer Vision Lecture 3 Linear Filters 03.11.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Demo Haribo Classification Code available on the class website...
Computer Vision Lecture 3 Linear Filters 03.11.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Demo Haribo Classification Code available on the class website...
Edge Detection. Introduction to Computer Vision. Useful Mathematics Funcs. The bad news
 Edge Detection Introduction to Computer Vision CS / ECE 8B Thursday, April, 004 Edge detection (HO #5) Edge detection is a local area operator that seeks to find significant, meaningful changes in image
Edge Detection Introduction to Computer Vision CS / ECE 8B Thursday, April, 004 Edge detection (HO #5) Edge detection is a local area operator that seeks to find significant, meaningful changes in image
Templates, Image Pyramids, and Filter Banks
 Templates, Image Pyramids, and Filter Banks 09/9/ Computer Vision James Hays, Brown Slides: Hoiem and others Review. Match the spatial domain image to the Fourier magnitude image 2 3 4 5 B A C D E Slide:
Templates, Image Pyramids, and Filter Banks 09/9/ Computer Vision James Hays, Brown Slides: Hoiem and others Review. Match the spatial domain image to the Fourier magnitude image 2 3 4 5 B A C D E Slide:
SIFT: SCALE INVARIANT FEATURE TRANSFORM BY DAVID LOWE
 SIFT: SCALE INVARIANT FEATURE TRANSFORM BY DAVID LOWE Overview Motivation of Work Overview of Algorithm Scale Space and Difference of Gaussian Keypoint Localization Orientation Assignment Descriptor Building
SIFT: SCALE INVARIANT FEATURE TRANSFORM BY DAVID LOWE Overview Motivation of Work Overview of Algorithm Scale Space and Difference of Gaussian Keypoint Localization Orientation Assignment Descriptor Building
SIFT: Scale Invariant Feature Transform
 1 SIFT: Scale Invariant Feature Transform With slides from Sebastian Thrun Stanford CS223B Computer Vision, Winter 2006 3 Pattern Recognition Want to find in here SIFT Invariances: Scaling Rotation Illumination
1 SIFT: Scale Invariant Feature Transform With slides from Sebastian Thrun Stanford CS223B Computer Vision, Winter 2006 3 Pattern Recognition Want to find in here SIFT Invariances: Scaling Rotation Illumination
Lecture 7: Finding Features (part 2/2)
") Lecture 7: Finding Features (part 2/2) Dr. Juan Carlos Niebles Stanford AI Lab Professor Fei- Fei Li Stanford Vision Lab 1 What we will learn today? Local invariant features MoPvaPon Requirements, invariances
Lecture 7: Finding Features (part 2/2) Dr. Juan Carlos Niebles Stanford AI Lab Professor Fei- Fei Li Stanford Vision Lab 1 What we will learn today? Local invariant features MoPvaPon Requirements, invariances
Feature detectors and descriptors. Fei-Fei Li
 Feature detectors and descriptors Fei-Fei Li Feature Detection e.g. DoG detected points (~300) coordinates, neighbourhoods Feature Description e.g. SIFT local descriptors (invariant) vectors database of
Feature detectors and descriptors Fei-Fei Li Feature Detection e.g. DoG detected points (~300) coordinates, neighbourhoods Feature Description e.g. SIFT local descriptors (invariant) vectors database of
Image Analysis. Feature extraction: corners and blobs
 Image Analysis Feature extraction: corners and blobs Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Svetlana Lazebnik, University of North Carolina at Chapel Hill (http://www.cs.unc.edu/~lazebnik/spring10/).
Image Analysis Feature extraction: corners and blobs Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Svetlana Lazebnik, University of North Carolina at Chapel Hill (http://www.cs.unc.edu/~lazebnik/spring10/).
Feature detectors and descriptors. Fei-Fei Li
 Feature detectors and descriptors Fei-Fei Li Feature Detection e.g. DoG detected points (~300) coordinates, neighbourhoods Feature Description e.g. SIFT local descriptors (invariant) vectors database of
Feature detectors and descriptors Fei-Fei Li Feature Detection e.g. DoG detected points (~300) coordinates, neighbourhoods Feature Description e.g. SIFT local descriptors (invariant) vectors database of
SIFT keypoint detection. D. Lowe, Distinctive image features from scale-invariant keypoints, IJCV 60 (2), pp , 2004.
, pp , 2004.") SIFT keypoint detection D. Lowe, Distinctive image features from scale-invariant keypoints, IJCV 60 (), pp. 91-110, 004. Keypoint detection with scale selection We want to extract keypoints with characteristic
SIFT keypoint detection D. Lowe, Distinctive image features from scale-invariant keypoints, IJCV 60 (), pp. 91-110, 004. Keypoint detection with scale selection We want to extract keypoints with characteristic
EE 6882 Visual Search Engine
 EE 6882 Visual Search Engine Prof. Shih Fu Chang, Feb. 13 th 2012 Lecture #4 Local Feature Matching Bag of Word image representation: coding and pooling (Many slides from A. Efors, W. Freeman, C. Kambhamettu,
EE 6882 Visual Search Engine Prof. Shih Fu Chang, Feb. 13 th 2012 Lecture #4 Local Feature Matching Bag of Word image representation: coding and pooling (Many slides from A. Efors, W. Freeman, C. Kambhamettu,
Lecture 7: Finding Features (part 2/2)
") Lecture 7: Finding Features (part 2/2) Professor Fei- Fei Li Stanford Vision Lab Lecture 7 -! 1 What we will learn today? Local invariant features MoHvaHon Requirements, invariances Keypoint localizahon
Lecture 7: Finding Features (part 2/2) Professor Fei- Fei Li Stanford Vision Lab Lecture 7 -! 1 What we will learn today? Local invariant features MoHvaHon Requirements, invariances Keypoint localizahon
Poisson Matting. Abstract. 1 Introduction. Jian Sun 1 Jiaya Jia 2 Chi-Keung Tang 2 Heung-Yeung Shum 1
 Poisson Matting Jian Sun 1 Jiaya Jia 2 Chi-Keung Tang 2 Heung-Yeung Shum 1 1 Microsoft Research Asia 2 Hong Kong University of Science and Technology Figure 1: Pulling of matte from a complex scene. From
Poisson Matting Jian Sun 1 Jiaya Jia 2 Chi-Keung Tang 2 Heung-Yeung Shum 1 1 Microsoft Research Asia 2 Hong Kong University of Science and Technology Figure 1: Pulling of matte from a complex scene. From
Gradient-domain image processing
 Gradient-domain image processing http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 10 Course announcements Homework 3 is out. - (Much) smaller
Gradient-domain image processing http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 10 Course announcements Homework 3 is out. - (Much) smaller
Image Filtering, Edges and Image Representation
 Image Filtering, Edges and Image Representation Capturing what s important Req reading: Chapter 7, 9 F&P Adelson, Simoncelli and Freeman (handout online) Opt reading: Horn 7 & 8 FP 8 February 19, 8 A nice
Image Filtering, Edges and Image Representation Capturing what s important Req reading: Chapter 7, 9 F&P Adelson, Simoncelli and Freeman (handout online) Opt reading: Horn 7 & 8 FP 8 February 19, 8 A nice
Blob Detection CSC 767
 Blob Detection CSC 767 Blob detection Slides: S. Lazebnik Feature detection with scale selection We want to extract features with characteristic scale that is covariant with the image transformation Blob
Blob Detection CSC 767 Blob detection Slides: S. Lazebnik Feature detection with scale selection We want to extract features with characteristic scale that is covariant with the image transformation Blob
Detectors part II Descriptors
 EECS 442 Computer vision Detectors part II Descriptors Blob detectors Invariance Descriptors Some slides of this lectures are courtesy of prof F. Li, prof S. Lazebnik, and various other lecturers Goal:
EECS 442 Computer vision Detectors part II Descriptors Blob detectors Invariance Descriptors Some slides of this lectures are courtesy of prof F. Li, prof S. Lazebnik, and various other lecturers Goal:
Image Alignment and Mosaicing Feature Tracking and the Kalman Filter
 Image Alignment and Mosaicing Feature Tracking and the Kalman Filter Image Alignment Applications Local alignment: Tracking Stereo Global alignment: Camera jitter elimination Image enhancement Panoramic
Image Alignment and Mosaicing Feature Tracking and the Kalman Filter Image Alignment Applications Local alignment: Tracking Stereo Global alignment: Camera jitter elimination Image enhancement Panoramic
Lecture 7: Edge Detection
 #1 Lecture 7: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Definition of an Edge First Order Derivative Approximation as Edge Detector #2 This Lecture Examples of Edge Detection
#1 Lecture 7: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Definition of an Edge First Order Derivative Approximation as Edge Detector #2 This Lecture Examples of Edge Detection
Scale & Affine Invariant Interest Point Detectors
 Scale & Affine Invariant Interest Point Detectors Krystian Mikolajczyk and Cordelia Schmid Presented by Hunter Brown & Gaurav Pandey, February 19, 2009 Roadmap: Motivation Scale Invariant Detector Affine
Scale & Affine Invariant Interest Point Detectors Krystian Mikolajczyk and Cordelia Schmid Presented by Hunter Brown & Gaurav Pandey, February 19, 2009 Roadmap: Motivation Scale Invariant Detector Affine
Attributed Graph Matching for Image-Features Association using SIFT Descriptors
 Attributed Graph Matching for Image-Features Association using SIFT Descriptors Gerard Sanromà, René Alquézar 2, and Francesc Serratosa Departament d Enginyeria Informàtica i Matemàtiques, Universitat
Attributed Graph Matching for Image-Features Association using SIFT Descriptors Gerard Sanromà, René Alquézar 2, and Francesc Serratosa Departament d Enginyeria Informàtica i Matemàtiques, Universitat
Invariant local features. Invariant Local Features. Classes of transformations. (Good) invariant local features. Case study: panorama stitching
 invariant local features. Case study: panorama stitching") Invariant local eatures Invariant Local Features Tuesday, February 6 Subset o local eature types designed to be invariant to Scale Translation Rotation Aine transormations Illumination 1) Detect distinctive
Invariant local eatures Invariant Local Features Tuesday, February 6 Subset o local eature types designed to be invariant to Scale Translation Rotation Aine transormations Illumination 1) Detect distinctive
Poisson Image Editing
 Poisson Image Editing Sébastien Boisgérault, Mines ParisTech, under CC BY-NC-SA 4.0 January 21, 2016 Contents Introduction 1 Modelling the Problem 2 Harmonic Functions 5 The irichlet Problem 8 Harmonic/Fourier
Poisson Image Editing Sébastien Boisgérault, Mines ParisTech, under CC BY-NC-SA 4.0 January 21, 2016 Contents Introduction 1 Modelling the Problem 2 Harmonic Functions 5 The irichlet Problem 8 Harmonic/Fourier
Portfolio Optimization
 Statistical Techniques in Robotics (16-831, F12) Lecture#12 (Monday October 8) Portfolio Optimization Lecturer: Drew Bagnell Scribe: Ji Zhang 1 1 Portfolio Optimization - No Regret Portfolio We want to
Statistical Techniques in Robotics (16-831, F12) Lecture#12 (Monday October 8) Portfolio Optimization Lecturer: Drew Bagnell Scribe: Ji Zhang 1 1 Portfolio Optimization - No Regret Portfolio We want to
Computational Photography
 Computational Photography Si Lu Spring 208 http://web.cecs.pdx.edu/~lusi/cs50/cs50_computati onal_photography.htm 04/0/208 Last Time o Digital Camera History of Camera Controlling Camera o Photography
Computational Photography Si Lu Spring 208 http://web.cecs.pdx.edu/~lusi/cs50/cs50_computati onal_photography.htm 04/0/208 Last Time o Digital Camera History of Camera Controlling Camera o Photography
Fast Local Laplacian Filters: Theory and Applications
 Fast Local Laplacian Filters: Theory and Applications Mathieu Aubry (INRIA, ENPC), Sylvain Paris (Adobe), Sam Hasinoff (Google), Jan Kautz (UCL), and Frédo Durand (MIT) Input Unsharp Mask, not edge-aware
Fast Local Laplacian Filters: Theory and Applications Mathieu Aubry (INRIA, ENPC), Sylvain Paris (Adobe), Sam Hasinoff (Google), Jan Kautz (UCL), and Frédo Durand (MIT) Input Unsharp Mask, not edge-aware
Harris Corner Detector
 Multimedia Computing: Algorithms, Systems, and Applications: Feature Extraction By Dr. Yu Cao Department of Computer Science The University of Massachusetts Lowell Lowell, MA 01854, USA Part of the slides
Multimedia Computing: Algorithms, Systems, and Applications: Feature Extraction By Dr. Yu Cao Department of Computer Science The University of Massachusetts Lowell Lowell, MA 01854, USA Part of the slides
Poisson Image Editing
 Poisson Image Editing Sébastien Boisgérault, Mines ParisTech, under CC BY-NC-SA 4.0 November 28, 2017 Contents Introduction 1 Modelling the Problem 2 Harmonic Functions 5 The irichlet Problem 8 Harmonic/Fourier
Poisson Image Editing Sébastien Boisgérault, Mines ParisTech, under CC BY-NC-SA 4.0 November 28, 2017 Contents Introduction 1 Modelling the Problem 2 Harmonic Functions 5 The irichlet Problem 8 Harmonic/Fourier
The Frequency Domain : Computational Photography Alexei Efros, CMU, Fall Many slides borrowed from Steve Seitz
 The Frequency Domain 15-463: Computational Photography Alexei Efros, CMU, Fall 2008 Somewhere in Cinque Terre, May 2005 Many slides borrowed from Steve Seitz Salvador Dali Gala Contemplating the Mediterranean
The Frequency Domain 15-463: Computational Photography Alexei Efros, CMU, Fall 2008 Somewhere in Cinque Terre, May 2005 Many slides borrowed from Steve Seitz Salvador Dali Gala Contemplating the Mediterranean
Multimedia Databases. Wolf-Tilo Balke Philipp Wille Institut für Informationssysteme Technische Universität Braunschweig
 Multimedia Databases Wolf-Tilo Balke Philipp Wille Institut für Informationssysteme Technische Universität Braunschweig http://www.ifis.cs.tu-bs.de 4 Previous Lecture Texture-Based Image Retrieval Low
Multimedia Databases Wolf-Tilo Balke Philipp Wille Institut für Informationssysteme Technische Universität Braunschweig http://www.ifis.cs.tu-bs.de 4 Previous Lecture Texture-Based Image Retrieval Low
SuperGIS Server 3.3 Functionality Matrix
 Functionality Matrix Apr 2017 Functionality Matrix SuperGIS Server, a comprehensive and server-based GIS, is designed for the organizations to create, manage, integrate and distribute a variety of GIS
Functionality Matrix Apr 2017 Functionality Matrix SuperGIS Server, a comprehensive and server-based GIS, is designed for the organizations to create, manage, integrate and distribute a variety of GIS
Multimedia Databases. Previous Lecture. 4.1 Multiresolution Analysis. 4 Shape-based Features. 4.1 Multiresolution Analysis
 Previous Lecture Multimedia Databases Texture-Based Image Retrieval Low Level Features Tamura Measure, Random Field Model High-Level Features Fourier-Transform, Wavelets Wolf-Tilo Balke Silviu Homoceanu
Previous Lecture Multimedia Databases Texture-Based Image Retrieval Low Level Features Tamura Measure, Random Field Model High-Level Features Fourier-Transform, Wavelets Wolf-Tilo Balke Silviu Homoceanu
SCALE-SPACE - Theory and Applications
 SCALE-SPACE - Theory and Applications Scale is embedded in the task: do you want only coins or TREASURE? SCALE-SPACE Theory and Applications - Scale-space theory is a framework of multiscale image/signal
SCALE-SPACE - Theory and Applications Scale is embedded in the task: do you want only coins or TREASURE? SCALE-SPACE Theory and Applications - Scale-space theory is a framework of multiscale image/signal
SIFT, GLOH, SURF descriptors. Dipartimento di Sistemi e Informatica
 SIFT, GLOH, SURF descriptors Dipartimento di Sistemi e Informatica Invariant local descriptor: Useful for Object RecogniAon and Tracking. Robot LocalizaAon and Mapping. Image RegistraAon and SAtching.
SIFT, GLOH, SURF descriptors Dipartimento di Sistemi e Informatica Invariant local descriptor: Useful for Object RecogniAon and Tracking. Robot LocalizaAon and Mapping. Image RegistraAon and SAtching.
Laplacian Filters. Sobel Filters. Laplacian Filters. Laplacian Filters. Laplacian Filters. Laplacian Filters
 Sobel Filters Note that smoothing the image before applying a Sobel filter typically gives better results. Even thresholding the Sobel filtered image cannot usually create precise, i.e., -pixel wide, edges.
Sobel Filters Note that smoothing the image before applying a Sobel filter typically gives better results. Even thresholding the Sobel filtered image cannot usually create precise, i.e., -pixel wide, edges.
The Frequency Domain. Many slides borrowed from Steve Seitz
 The Frequency Domain Many slides borrowed from Steve Seitz Somewhere in Cinque Terre, May 2005 15-463: Computational Photography Alexei Efros, CMU, Spring 2010 Salvador Dali Gala Contemplating the Mediterranean
The Frequency Domain Many slides borrowed from Steve Seitz Somewhere in Cinque Terre, May 2005 15-463: Computational Photography Alexei Efros, CMU, Spring 2010 Salvador Dali Gala Contemplating the Mediterranean
Review Smoothing Spatial Filters Sharpening Spatial Filters. Spatial Filtering. Dr. Praveen Sankaran. Department of ECE NIT Calicut.
 Spatial Filtering Dr. Praveen Sankaran Department of ECE NIT Calicut January 7, 203 Outline 2 Linear Nonlinear 3 Spatial Domain Refers to the image plane itself. Direct manipulation of image pixels. Figure:
Spatial Filtering Dr. Praveen Sankaran Department of ECE NIT Calicut January 7, 203 Outline 2 Linear Nonlinear 3 Spatial Domain Refers to the image plane itself. Direct manipulation of image pixels. Figure:
Overview. Introduction to local features. Harris interest points + SSD, ZNCC, SIFT. Evaluation and comparison of different detectors
 Overview Introduction to local features Harris interest points + SSD, ZNCC, SIFT Scale & affine invariant interest point detectors Evaluation and comparison of different detectors Region descriptors and
Overview Introduction to local features Harris interest points + SSD, ZNCC, SIFT Scale & affine invariant interest point detectors Evaluation and comparison of different detectors Region descriptors and
Scale & Affine Invariant Interest Point Detectors
 Scale & Affine Invariant Interest Point Detectors KRYSTIAN MIKOLAJCZYK AND CORDELIA SCHMID [2004] Shreyas Saxena Gurkirit Singh 23/11/2012 Introduction We are interested in finding interest points. What
Scale & Affine Invariant Interest Point Detectors KRYSTIAN MIKOLAJCZYK AND CORDELIA SCHMID [2004] Shreyas Saxena Gurkirit Singh 23/11/2012 Introduction We are interested in finding interest points. What
Face and Straight Line Detection in Equirectangular Images
 04-07 de Julho - FCT/UNESP - P. Prudente VI Workshop de Visão Computacional Face and Straight Line Detection in Equirectangular Images Leonardo K. Sacht, Paulo C. Carvalho, Luiz Velho Visgraf - IMPA Estrada
04-07 de Julho - FCT/UNESP - P. Prudente VI Workshop de Visão Computacional Face and Straight Line Detection in Equirectangular Images Leonardo K. Sacht, Paulo C. Carvalho, Luiz Velho Visgraf - IMPA Estrada
Video and Motion Analysis Computer Vision Carnegie Mellon University (Kris Kitani)
") Video and Motion Analysis 16-385 Computer Vision Carnegie Mellon University (Kris Kitani) Optical flow used for feature tracking on a drone Interpolated optical flow used for super slow-mo optical flow
Video and Motion Analysis 16-385 Computer Vision Carnegie Mellon University (Kris Kitani) Optical flow used for feature tracking on a drone Interpolated optical flow used for super slow-mo optical flow
Overview. Harris interest points. Comparing interest points (SSD, ZNCC, SIFT) Scale & affine invariant interest points
 Scale & affine invariant interest points") Overview Harris interest points Comparing interest points (SSD, ZNCC, SIFT) Scale & affine invariant interest points Evaluation and comparison of different detectors Region descriptors and their performance
Overview Harris interest points Comparing interest points (SSD, ZNCC, SIFT) Scale & affine invariant interest points Evaluation and comparison of different detectors Region descriptors and their performance
Section 20: Arrow Diagrams on the Integers
 Section 0: Arrow Diagrams on the Integers Most of the material we have discussed so far concerns the idea and representations of functions. A function is a relationship between a set of inputs (the leave
Section 0: Arrow Diagrams on the Integers Most of the material we have discussed so far concerns the idea and representations of functions. A function is a relationship between a set of inputs (the leave
Lecture 3: Linear Filters
 Lecture 3: Linear Filters Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Images as functions Linear systems (filters) Convolution and correlation Discrete Fourier Transform (DFT)
Lecture 3: Linear Filters Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Images as functions Linear systems (filters) Convolution and correlation Discrete Fourier Transform (DFT)
Interest Operators. All lectures are from posted research papers. Harris Corner Detector: the first and most basic interest operator
 Interest Operators All lectures are from posted research papers. Harris Corner Detector: the first and most basic interest operator SIFT interest point detector and region descriptor Kadir Entrop Detector
Interest Operators All lectures are from posted research papers. Harris Corner Detector: the first and most basic interest operator SIFT interest point detector and region descriptor Kadir Entrop Detector
Wavelets and Multiresolution Processing
 Wavelets and Multiresolution Processing Wavelets Fourier transform has it basis functions in sinusoids Wavelets based on small waves of varying frequency and limited duration In addition to frequency,
Wavelets and Multiresolution Processing Wavelets Fourier transform has it basis functions in sinusoids Wavelets based on small waves of varying frequency and limited duration In addition to frequency,
Image Segmentation: Definition Importance. Digital Image Processing, 2nd ed. Chapter 10 Image Segmentation.
 : Definition Importance Detection of Discontinuities: 9 R = wi z i= 1 i Point Detection: 1. A Mask 2. Thresholding R T Line Detection: A Suitable Mask in desired direction Thresholding Line i : R R, j
: Definition Importance Detection of Discontinuities: 9 R = wi z i= 1 i Point Detection: 1. A Mask 2. Thresholding R T Line Detection: A Suitable Mask in desired direction Thresholding Line i : R R, j
Distinguish between different types of scenes. Matching human perception Understanding the environment
 Scene Recognition Adriana Kovashka UTCS, PhD student Problem Statement Distinguish between different types of scenes Applications Matching human perception Understanding the environment Indexing of images
Scene Recognition Adriana Kovashka UTCS, PhD student Problem Statement Distinguish between different types of scenes Applications Matching human perception Understanding the environment Indexing of images
Statistical Learning Notes III-Section 2.4.3
 Statistical Learning Notes III-Section 2.4.3 "Graphical" Spectral Features Stephen Vardeman Analytics Iowa LLC January 2019 Stephen Vardeman (Analytics Iowa LLC) Statistical Learning Notes III-Section
Statistical Learning Notes III-Section 2.4.3 "Graphical" Spectral Features Stephen Vardeman Analytics Iowa LLC January 2019 Stephen Vardeman (Analytics Iowa LLC) Statistical Learning Notes III-Section
CS 4495 Computer Vision. Frequency and Fourier Transforms. Aaron Bobick School of Interactive Computing. Frequency and Fourier Transform
 CS 4495 Computer Vision Frequency and Fourier Transforms Aaron Bobick School of Interactive Computing Administrivia Project 1 is (still) on line get started now! Readings for this week: FP Chapter 4 (which
CS 4495 Computer Vision Frequency and Fourier Transforms Aaron Bobick School of Interactive Computing Administrivia Project 1 is (still) on line get started now! Readings for this week: FP Chapter 4 (which
Lecture 04 Image Filtering
 Institute of Informatics Institute of Neuroinformatics Lecture 04 Image Filtering Davide Scaramuzza 1 Lab Exercise 2 - Today afternoon Room ETH HG E 1.1 from 13:15 to 15:00 Work description: your first
Institute of Informatics Institute of Neuroinformatics Lecture 04 Image Filtering Davide Scaramuzza 1 Lab Exercise 2 - Today afternoon Room ETH HG E 1.1 from 13:15 to 15:00 Work description: your first
Bananagrams Tile Extraction and Letter Recognition for Rapid Word Suggestion
 Bananagrams Tile Extraction and Letter Recognition for Rapid Word Suggestion Steven Leung, Steffi Perkins, and Colleen Rhoades Department of Bioengineering Stanford University Stanford, CA Abstract Bananagrams
Bananagrams Tile Extraction and Letter Recognition for Rapid Word Suggestion Steven Leung, Steffi Perkins, and Colleen Rhoades Department of Bioengineering Stanford University Stanford, CA Abstract Bananagrams
Multimedia Databases. 4 Shape-based Features. 4.1 Multiresolution Analysis. 4.1 Multiresolution Analysis. 4.1 Multiresolution Analysis
 4 Shape-based Features Multimedia Databases Wolf-Tilo Balke Silviu Homoceanu Institut für Informationssysteme Technische Universität Braunschweig http://www.ifis.cs.tu-bs.de 4 Multiresolution Analysis
4 Shape-based Features Multimedia Databases Wolf-Tilo Balke Silviu Homoceanu Institut für Informationssysteme Technische Universität Braunschweig http://www.ifis.cs.tu-bs.de 4 Multiresolution Analysis
Medical Image Analysis
 Medical Image Analysis CS 593 / 791 Computer Science and Electrical Engineering Dept. West Virginia University 23rd January 2006 Outline 1 Recap 2 Edge Enhancement 3 Experimental Results 4 The rest of
Medical Image Analysis CS 593 / 791 Computer Science and Electrical Engineering Dept. West Virginia University 23rd January 2006 Outline 1 Recap 2 Edge Enhancement 3 Experimental Results 4 The rest of
CSE 408 Multimedia Information System Yezhou Yang
 Image and Video Compression CSE 408 Multimedia Information System Yezhou Yang Lots of slides from Hassan Mansour Class plan Today: Project 2 roundup Today: Image and Video compression Nov 10: final project
Image and Video Compression CSE 408 Multimedia Information System Yezhou Yang Lots of slides from Hassan Mansour Class plan Today: Project 2 roundup Today: Image and Video compression Nov 10: final project
Smoothed Particle Hydrodynamics (SPH) Huamin Wang
 Huamin Wang") Smoothed Particle Hydrodynamics (SPH) Huamin Wang Fluid Representation Fluid is represented using a set of particles. Particle i has position x i, velocity v i, and mass m i. Animation Example Using 10
Smoothed Particle Hydrodynamics (SPH) Huamin Wang Fluid Representation Fluid is represented using a set of particles. Particle i has position x i, velocity v i, and mass m i. Animation Example Using 10
Edge Detection in Computer Vision Systems
 1 CS332 Visual Processing in Computer and Biological Vision Systems Edge Detection in Computer Vision Systems This handout summarizes much of the material on the detection and description of intensity
1 CS332 Visual Processing in Computer and Biological Vision Systems Edge Detection in Computer Vision Systems This handout summarizes much of the material on the detection and description of intensity
Recap: edge detection. Source: D. Lowe, L. Fei-Fei
 Recap: edge detection Source: D. Lowe, L. Fei-Fei Canny edge detector 1. Filter image with x, y derivatives of Gaussian 2. Find magnitude and orientation of gradient 3. Non-maximum suppression: Thin multi-pixel
Recap: edge detection Source: D. Lowe, L. Fei-Fei Canny edge detector 1. Filter image with x, y derivatives of Gaussian 2. Find magnitude and orientation of gradient 3. Non-maximum suppression: Thin multi-pixel
CS 188: Artificial Intelligence Spring Announcements
 CS 188: Artificial Intelligence Spring 2010 Lecture 22: Nearest Neighbors, Kernels 4/18/2011 Pieter Abbeel UC Berkeley Slides adapted from Dan Klein Announcements On-going: contest (optional and FUN!)
CS 188: Artificial Intelligence Spring 2010 Lecture 22: Nearest Neighbors, Kernels 4/18/2011 Pieter Abbeel UC Berkeley Slides adapted from Dan Klein Announcements On-going: contest (optional and FUN!)
8.EE The Intersection of Two
 8.EE The Intersection of Two Lines Alignments to Content Standards: 8.EE.C.8.a Task a. Draw the two lines that intersect only at the point. One of the lines should pass (0, ) through the point. b. Write
8.EE The Intersection of Two Lines Alignments to Content Standards: 8.EE.C.8.a Task a. Draw the two lines that intersect only at the point. One of the lines should pass (0, ) through the point. b. Write
Wavelets, Filter Banks and Multiresolution Signal Processing
 Wavelets, Filter Banks and Multiresolution Signal Processing It is with logic that one proves; it is with intuition that one invents. Henri Poincaré Introduction - 1 A bit of history: from Fourier to Haar
Wavelets, Filter Banks and Multiresolution Signal Processing It is with logic that one proves; it is with intuition that one invents. Henri Poincaré Introduction - 1 A bit of history: from Fourier to Haar
A Laplacian of Gaussian-based Approach for Spot Detection in Two-Dimensional Gel Electrophoresis Images
 A Laplacian of Gaussian-based Approach for Spot Detection in Two-Dimensional Gel Electrophoresis Images Feng He 1, Bangshu Xiong 1, Chengli Sun 1, Xiaobin Xia 1 1 Key Laboratory of Nondestructive Test
A Laplacian of Gaussian-based Approach for Spot Detection in Two-Dimensional Gel Electrophoresis Images Feng He 1, Bangshu Xiong 1, Chengli Sun 1, Xiaobin Xia 1 1 Key Laboratory of Nondestructive Test
Advanced Features. Advanced Features: Topics. Jana Kosecka. Slides from: S. Thurn, D. Lowe, Forsyth and Ponce. Advanced features and feature matching
 Advanced Features Jana Kosecka Slides from: S. Thurn, D. Lowe, Forsyth and Ponce Advanced Features: Topics Advanced features and feature matching Template matching SIFT features Haar features 2 1 Features
Advanced Features Jana Kosecka Slides from: S. Thurn, D. Lowe, Forsyth and Ponce Advanced Features: Topics Advanced features and feature matching Template matching SIFT features Haar features 2 1 Features
Image processing and nonparametric regression
 Image processing and nonparametric regression Rencontres R BoRdeaux 2012 B. Thieurmel Collaborators : P.A. Cornillon, N. Hengartner, E. Matzner-Løber, B. Wolhberg 2 Juillet 2012 Rencontres R BoRdeaux 2012
Image processing and nonparametric regression Rencontres R BoRdeaux 2012 B. Thieurmel Collaborators : P.A. Cornillon, N. Hengartner, E. Matzner-Løber, B. Wolhberg 2 Juillet 2012 Rencontres R BoRdeaux 2012
Advanced Edge Detection 1
 Advanced Edge Detection 1 Lecture 4 See Sections 2.4 and 1.2.5 in Reinhard Klette: Concise Computer Vision Springer-Verlag, London, 2014 1 See last slide for copyright information. 1 / 27 Agenda 1 LoG
Advanced Edge Detection 1 Lecture 4 See Sections 2.4 and 1.2.5 in Reinhard Klette: Concise Computer Vision Springer-Verlag, London, 2014 1 See last slide for copyright information. 1 / 27 Agenda 1 LoG
Thinking in Frequency
 09/05/17 Thinking in Frequency Computational Photography University of Illinois Derek Hoiem Administrative Matlab/linear algebra tutorial tomorrow, planned for 6:30pm Probably 1214 DCL (will send confirmation
09/05/17 Thinking in Frequency Computational Photography University of Illinois Derek Hoiem Administrative Matlab/linear algebra tutorial tomorrow, planned for 6:30pm Probably 1214 DCL (will send confirmation