What is Motion? As Visual Input: Change in the spatial distribution of light on the sensors.
|
|
|
- Warren Caldwell
- 5 years ago
- Views:
Transcription
1 What is Motion? As Visual Input: Change in the spatial distribution of light on the sensors. Minimally, di(x,y,t)/dt 0 As Perception: Inference about causes of intensity change, e.g. I(x,y,t) v OBJ (x,y,z,t)

2 Motion Field: Movement of Projected points
3 Essential Matrix O' x x'= R t x ' O x OO' = 0 x' r t Rx ( ) = 0 x' E x ( ) = 0 x'e x = 0 E = 0 t z t y t z 0 t x R t y t x 0
4 Differential Camera Motion For a small rotation around an axis ω, rotation of the camera frame can be r expressed: x '= Rx r + r t And motion of a point: Thus r x '= x r + (ω x r )dt + v r dt = (I + dt[ ω ]) x r + v r dt p'= p + dp dt dt Epipolar:
5
6
7 Basic Idea 1) Estimate point motions 2) use point motions to estimate camera/object motion Problem: Motion of projected points not directly measurable. -Movement of projected points creates displacements of image patches -- Infer point motion from image patch motion Matching across frames Differential approach Fourier/filtering methods
8
9
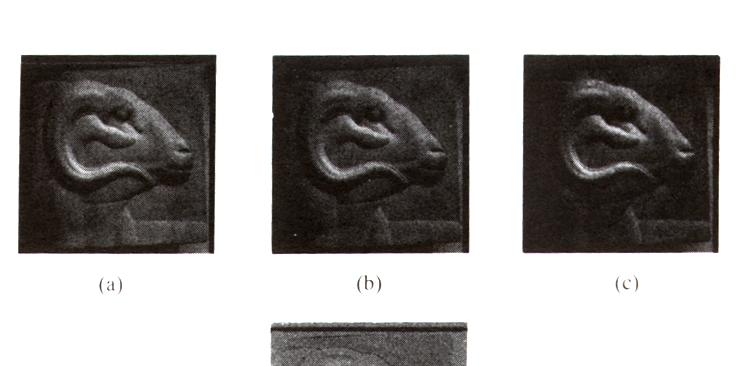
10 Assumption is frequently violatedneed invariant methods
11
12 h(x) = udt
13 Derivation I(x, y,τ) = I(x(τ + t),y(τ + t),τ + t) I(x, y,τ) I(x(τ),y(τ),τ) + I x I x x t + I y x t + I t = 0 I x v x + I y v y + I t = 0 I I t T v x v y = 0 1 x t + I y x t + I t I v T x = I v t y r A T v = I t r v = A(AA T ) 1 I t r v = I I t I 2
14
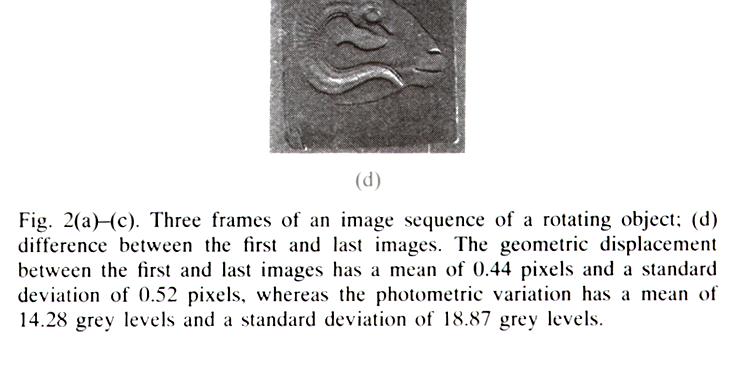
15 Brightness constraint revealed







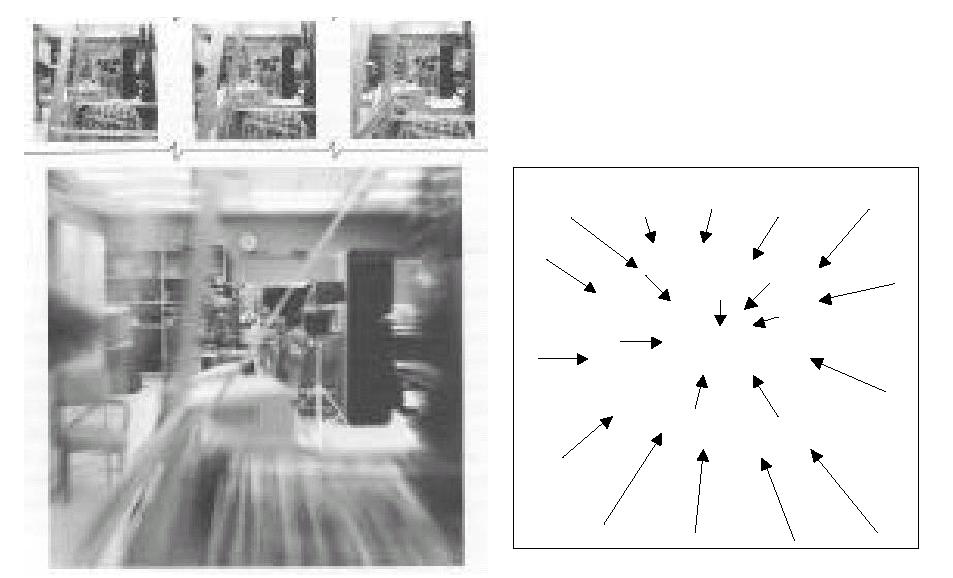
16 Image sequence from Egomotion
 Time ~100msec Space ~1-10deg Local")
17 OpticFlow: (Gibson,1950) Assigns local image velocities v(x,y,t) Time ~100msec Space ~1-10deg Local Translations

18 Brightness constraint
19 Photometric Motion
20
21 Measurement Problems Brightness constraint violations Ambiguity Aliasing Non-translational motions
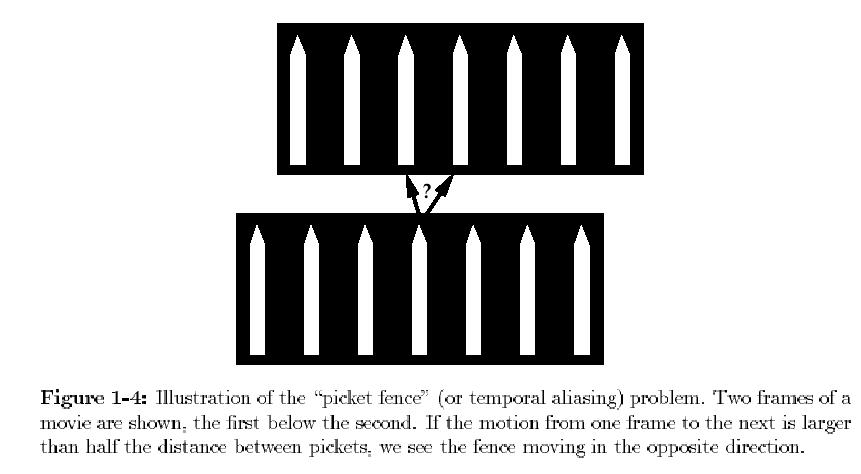
22 Aliasing
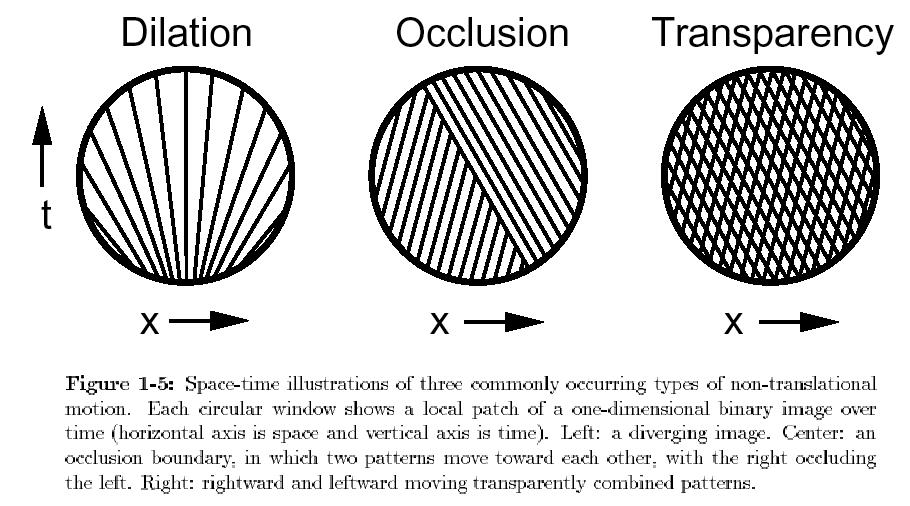
23 Non-translational motion
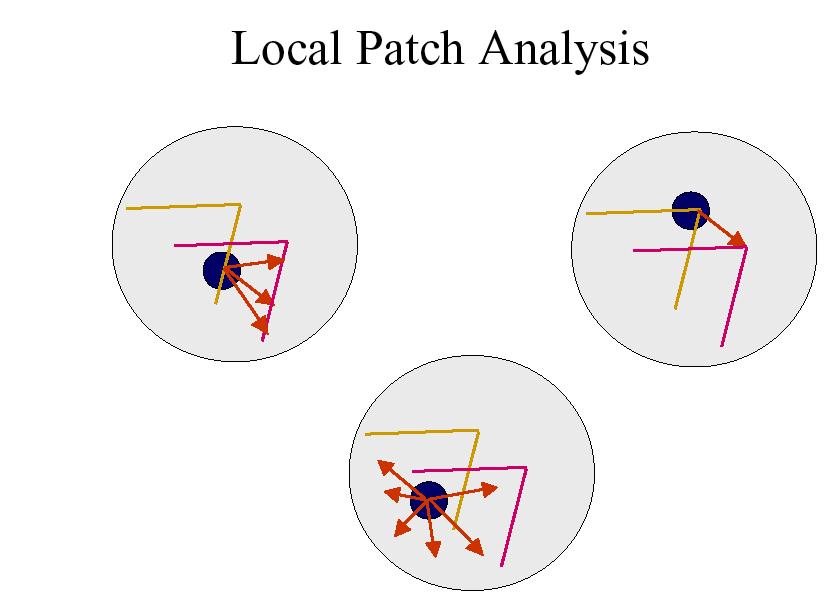
24 Problem: Images contain many edges-- Aperture problem Normal flow: Motion component in the direction of the edge
25
26
27 Find Least squares solution for multiple patches.
")

28 Aperture Problem (Motion/Form Ambiguity) Result: Early visual measurements are ambiguous w.r.t. motion.


29 Aperture Problem (Motion/Form Ambiguity) However, both the motion and the form of the pattern are implicitly encoded across the population of V1 neurons. Actual motion
30
31
32
33
34
35
36

37
38
39 Fourier Methods More fundamental than the Taylor approximation is the brightness constraint
40 Localizing by a windowing function: Which is the equation of a plane, weighted by the spatial texture Localizing the velocity to a patch using a windowing function: Has the effect of blurring the plane with the transform of the window: A Fourier Pancake.

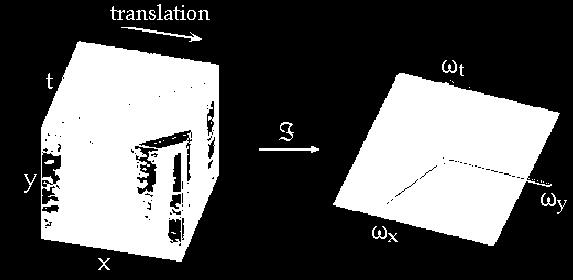
41 X-T Slice of Translating Camera y t x x

42 2-D Fourier Analysis Image translations: are Oriented in Space-Time have Power Spectra along a line in Fourier space

43 3-D Motion Information (x-y-t)
44 Information in Translating Images The power spectral density of a translating image lies on a plane in (ω x, ω y, ω t ) space. The orientation of this plane is uniquely determined by the velocity of the translation. The amplitudes on the plane are determined by the (spatial) image spectrum.



45 Solving the ambiguities Pool neurons tuned to frequencies in a common plane ω t ω x ω y Velocity plane V1 receptive field
46
47
48
49
50 Generalizations
51
52
53
54
55
56
57
58
59
60
61
62
63 The three main issues in tracking
64 Tracking Very general model: We assume there are moving objects, which have an underlying state X There are measurements Y, some of which are functions of this state There is a clock at each tick, the state changes at each tick, we get a new observation Examples object is ball, state is 3D position+velocity, measurements are stereo pairs object is person, state is body configuration, measurements are frames, clock is in camera (30 fps)
65 Three main steps
66 Simplifying Assumptions
67 Assumptions allow recursive solutions Decompose estimation problem part that depends on new observation part that can be computed from previous history E.g., running average: a t = 1 t a t = t 1 t y i = 1 i=1:t t a t t y t y i + 1 i=1:(t 1) t y t = t 1 t 1 t 1 Now in form that allows recursive application y i i=1:(t 1) + 1 t y t
68 Tracking as induction Assume data association is done a dangerous assumption--assumes good segmentation Do correction for the 0 th frame Assume we have corrected estimate for i th frame show we can do prediction for i+1, correction for i+1
69 Base case
70 Given Induction step
71 Induction step
72 Linear dynamic models Use notation ~ to mean has the pdf of, N(a, b) is a normal distribution with mean a and covariance b. Then a linear dynamic model has the form State Dynamics x i = N( D i 1 x i 1 ;Σ ) di y i = N( M i x i ;Σ ) mi This is much, much more general than it looks, and extremely powerful Measurement Dynamics
73 Examples Drifting points we assume that the new position of the point is the old one, plus noise. For the measurement model, we may not need to observe the whole state of the object e.g. a point moving in 3D, at the 3k th tick we see x, 3k+1 th tick we see y, 3k+2 th tick we see z in this case, we can still make decent estimates of all three coordinates at each tick. This property, which does not apply to every model, is called Observability
74 Examples Points moving with constant velocity Periodic motion Etc. Points moving with constant acceleration
75 Points moving with constant We have velocity u i = u i 1 + Δtv i 1 + ε i v i = v i 1 + ς i (the Greek letters denote noise terms) Stack (u, v) into a single state vector which is the form we had above u v i = 1 Δt 0 1 u v i 1 + noise
76 Points moving with constant acceleration We have u i = u i 1 + Δtv i 1 + ε i v i = v i 1 + Δta i 1 +ς i a i = a i 1 + ξ i (the Greek letters denote noise terms) Stack (u, v) into a single state vector which is the form we had above u v a i = 1 Δt 0 u 0 1 Δt v a i 1 + noise
77
78
79 The Kalman Filter Key ideas: Linear models interact uniquely well with Gaussian noise - make the prior Gaussian, everything else Gaussian and the calculations are easy Gaussians are really easy to represent --- once you know the mean and covariance, you re done
80
81 The Kalman Filter in 1D Dynamic Model Notation Predicted mean Corrected mean
82
83
84
85
86
87
88 Correction for 1D Kalman filter Pattern match to identities given in book basically, guess the integrals, get: Notice: if measurement noise is small, we rely mainly on the measurement, if it s large, mainly on the prediction
89 In higher dimensions, derivation follows the same lines, but isn t as easy. Expressions here.
90
91
92
93
94 Smoothing Idea We don t have the best estimate of state - what about the future? Run two filters, one moving forward, the other backward in time. Now combine state estimates The crucial point here is that we can obtain a smoothed estimate by viewing the backward filter s prediction as yet another measurement for the forward filter so we ve already done the equations
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115 Data Association Nearest neighbours choose the measurement with highest probability given predicted state popular, but can lead to catastrophe Probabilistic Data Association combine measurements, weighting by probability given predicted state gate using predicted state
116
117
118

119
Announcements. Tracking. Comptuer Vision I. The Motion Field. = ω. Pure Translation. Motion Field Equation. Rigid Motion: General Case
 Announcements Tracking Computer Vision I CSE5A Lecture 17 HW 3 due toda HW 4 will be on web site tomorrow: Face recognition using 3 techniques Toda: Tracking Reading: Sections 17.1-17.3 The Motion Field
Announcements Tracking Computer Vision I CSE5A Lecture 17 HW 3 due toda HW 4 will be on web site tomorrow: Face recognition using 3 techniques Toda: Tracking Reading: Sections 17.1-17.3 The Motion Field
Image Alignment and Mosaicing Feature Tracking and the Kalman Filter
 Image Alignment and Mosaicing Feature Tracking and the Kalman Filter Image Alignment Applications Local alignment: Tracking Stereo Global alignment: Camera jitter elimination Image enhancement Panoramic
Image Alignment and Mosaicing Feature Tracking and the Kalman Filter Image Alignment Applications Local alignment: Tracking Stereo Global alignment: Camera jitter elimination Image enhancement Panoramic
Computer Vision Motion
 Computer Vision Motion Professor Hager http://www.cs.jhu.edu/~hager 12/1/12 CS 461, Copyright G.D. Hager Outline From Stereo to Motion The motion field and optical flow (2D motion) Factorization methods
Computer Vision Motion Professor Hager http://www.cs.jhu.edu/~hager 12/1/12 CS 461, Copyright G.D. Hager Outline From Stereo to Motion The motion field and optical flow (2D motion) Factorization methods
Kalman Filter Computer Vision (Kris Kitani) Carnegie Mellon University
 Carnegie Mellon University") Kalman Filter 16-385 Computer Vision (Kris Kitani) Carnegie Mellon University Examples up to now have been discrete (binary) random variables Kalman filtering can be seen as a special case of a temporal
Kalman Filter 16-385 Computer Vision (Kris Kitani) Carnegie Mellon University Examples up to now have been discrete (binary) random variables Kalman filtering can be seen as a special case of a temporal
Linear Dynamical Systems
 Linear Dynamical Systems Sargur N. srihari@cedar.buffalo.edu Machine Learning Course: http://www.cedar.buffalo.edu/~srihari/cse574/index.html Two Models Described by Same Graph Latent variables Observations
Linear Dynamical Systems Sargur N. srihari@cedar.buffalo.edu Machine Learning Course: http://www.cedar.buffalo.edu/~srihari/cse574/index.html Two Models Described by Same Graph Latent variables Observations
Convolution and Linear Systems
 CS 450: Introduction to Digital Signal and Image Processing Bryan Morse BYU Computer Science Introduction Analyzing Systems Goal: analyze a device that turns one signal into another. Notation: f (t) g(t)
CS 450: Introduction to Digital Signal and Image Processing Bryan Morse BYU Computer Science Introduction Analyzing Systems Goal: analyze a device that turns one signal into another. Notation: f (t) g(t)
Video and Motion Analysis Computer Vision Carnegie Mellon University (Kris Kitani)
") Video and Motion Analysis 16-385 Computer Vision Carnegie Mellon University (Kris Kitani) Optical flow used for feature tracking on a drone Interpolated optical flow used for super slow-mo optical flow
Video and Motion Analysis 16-385 Computer Vision Carnegie Mellon University (Kris Kitani) Optical flow used for feature tracking on a drone Interpolated optical flow used for super slow-mo optical flow
1 Kalman Filter Introduction
 1 Kalman Filter Introduction You should first read Chapter 1 of Stochastic models, estimation, and control: Volume 1 by Peter S. Maybec (available here). 1.1 Explanation of Equations (1-3) and (1-4) Equation
1 Kalman Filter Introduction You should first read Chapter 1 of Stochastic models, estimation, and control: Volume 1 by Peter S. Maybec (available here). 1.1 Explanation of Equations (1-3) and (1-4) Equation
Computer Vision I. Announcements
 Announcements Motion II No class Wednesda (Happ Thanksgiving) HW4 will be due Frida 1/8 Comment on Non-maximal supression CSE5A Lecture 15 Shi-Tomasi Corner Detector Filter image with a Gaussian. Compute
Announcements Motion II No class Wednesda (Happ Thanksgiving) HW4 will be due Frida 1/8 Comment on Non-maximal supression CSE5A Lecture 15 Shi-Tomasi Corner Detector Filter image with a Gaussian. Compute
Visual Object Recognition
 Visual Object Recognition Lecture 2: Image Formation Per-Erik Forssén, docent Computer Vision Laboratory Department of Electrical Engineering Linköping University Lecture 2: Image Formation Pin-hole, and
Visual Object Recognition Lecture 2: Image Formation Per-Erik Forssén, docent Computer Vision Laboratory Department of Electrical Engineering Linköping University Lecture 2: Image Formation Pin-hole, and
Lecture 8: Interest Point Detection. Saad J Bedros
 #1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Last Lecture : Edge Detection Preprocessing of image is desired to eliminate or at least minimize noise effects There is always tradeoff
#1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Last Lecture : Edge Detection Preprocessing of image is desired to eliminate or at least minimize noise effects There is always tradeoff
Hidden Markov Models (recap BNs)
") Probabilistic reasoning over time - Hidden Markov Models (recap BNs) Applied artificial intelligence (EDA132) Lecture 10 2016-02-17 Elin A. Topp Material based on course book, chapter 15 1 A robot s view
Probabilistic reasoning over time - Hidden Markov Models (recap BNs) Applied artificial intelligence (EDA132) Lecture 10 2016-02-17 Elin A. Topp Material based on course book, chapter 15 1 A robot s view
Optical Flow, Motion Segmentation, Feature Tracking
 BIL 719 - Computer Vision May 21, 2014 Optical Flow, Motion Segmentation, Feature Tracking Aykut Erdem Dept. of Computer Engineering Hacettepe University Motion Optical Flow Motion Segmentation Feature
BIL 719 - Computer Vision May 21, 2014 Optical Flow, Motion Segmentation, Feature Tracking Aykut Erdem Dept. of Computer Engineering Hacettepe University Motion Optical Flow Motion Segmentation Feature
Lecture 8: Interest Point Detection. Saad J Bedros
 #1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Review of Edge Detectors #2 Today s Lecture Interest Points Detection What do we mean with Interest Point Detection in an Image Goal:
#1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Review of Edge Detectors #2 Today s Lecture Interest Points Detection What do we mean with Interest Point Detection in an Image Goal:
EKF and SLAM. McGill COMP 765 Sept 18 th, 2017
 EKF and SLAM McGill COMP 765 Sept 18 th, 2017 Outline News and information Instructions for paper presentations Continue on Kalman filter: EKF and extension to mapping Example of a real mapping system:
EKF and SLAM McGill COMP 765 Sept 18 th, 2017 Outline News and information Instructions for paper presentations Continue on Kalman filter: EKF and extension to mapping Example of a real mapping system:
Motion Estimation (I)
") Motion Estimation (I) Ce Liu celiu@microsoft.com Microsoft Research New England We live in a moving world Perceiving, understanding and predicting motion is an important part of our daily lives Motion
Motion Estimation (I) Ce Liu celiu@microsoft.com Microsoft Research New England We live in a moving world Perceiving, understanding and predicting motion is an important part of our daily lives Motion
Linear-Quadratic-Gaussian (LQG) Controllers and Kalman Filters
 Controllers and Kalman Filters") Linear-Quadratic-Gaussian (LQG) Controllers and Kalman Filters Emo Todorov Applied Mathematics and Computer Science & Engineering University of Washington Winter 204 Emo Todorov (UW) AMATH/CSE 579, Winter
Linear-Quadratic-Gaussian (LQG) Controllers and Kalman Filters Emo Todorov Applied Mathematics and Computer Science & Engineering University of Washington Winter 204 Emo Todorov (UW) AMATH/CSE 579, Winter
Convolutional Neural Networks
 Convolutional Neural Networks Books» http://www.deeplearningbook.org/ Books http://neuralnetworksanddeeplearning.com/.org/ reviews» http://www.deeplearningbook.org/contents/linear_algebra.html» http://www.deeplearningbook.org/contents/prob.html»
Convolutional Neural Networks Books» http://www.deeplearningbook.org/ Books http://neuralnetworksanddeeplearning.com/.org/ reviews» http://www.deeplearningbook.org/contents/linear_algebra.html» http://www.deeplearningbook.org/contents/prob.html»
Bayes Filter Reminder. Kalman Filter Localization. Properties of Gaussians. Gaussians. Prediction. Correction. σ 2. Univariate. 1 2πσ e.
 Kalman Filter Localization Bayes Filter Reminder Prediction Correction Gaussians p(x) ~ N(µ,σ 2 ) : Properties of Gaussians Univariate p(x) = 1 1 2πσ e 2 (x µ) 2 σ 2 µ Univariate -σ σ Multivariate µ Multivariate
Kalman Filter Localization Bayes Filter Reminder Prediction Correction Gaussians p(x) ~ N(µ,σ 2 ) : Properties of Gaussians Univariate p(x) = 1 1 2πσ e 2 (x µ) 2 σ 2 µ Univariate -σ σ Multivariate µ Multivariate
ECO 513 Fall 2008 C.Sims KALMAN FILTER. s t = As t 1 + ε t Measurement equation : y t = Hs t + ν t. u t = r t. u 0 0 t 1 + y t = [ H I ] u t.
![ECO 513 Fall 2008 C.Sims KALMAN FILTER. s t = As t 1 + ε t Measurement equation : y t = Hs t + ν t. u t = r t. u 0 0 t 1 + y t = [ H I ] u t.](/thumbs/87/95887004.jpg "ECO 513 Fall 2008 C.Sims KALMAN FILTER. s t = As t 1 + ε t Measurement equation : y t = Hs t + ν t. u t = r t. u 0 0 t 1 + y t = [ H I ] u t.") ECO 513 Fall 2008 C.Sims KALMAN FILTER Model in the form 1. THE KALMAN FILTER Plant equation : s t = As t 1 + ε t Measurement equation : y t = Hs t + ν t. Var(ε t ) = Ω, Var(ν t ) = Ξ. ε t ν t and (ε t,
ECO 513 Fall 2008 C.Sims KALMAN FILTER Model in the form 1. THE KALMAN FILTER Plant equation : s t = As t 1 + ε t Measurement equation : y t = Hs t + ν t. Var(ε t ) = Ω, Var(ν t ) = Ξ. ε t ν t and (ε t,
Visual features: From Fourier to Gabor
 Visual features: From Fourier to Gabor Deep Learning Summer School 2015, Montreal Hubel and Wiesel, 1959 from: Natural Image Statistics (Hyvarinen, Hurri, Hoyer; 2009) Alexnet ICA from: Natural Image Statistics
Visual features: From Fourier to Gabor Deep Learning Summer School 2015, Montreal Hubel and Wiesel, 1959 from: Natural Image Statistics (Hyvarinen, Hurri, Hoyer; 2009) Alexnet ICA from: Natural Image Statistics
Controlled Diffusions and Hamilton-Jacobi Bellman Equations
 Controlled Diffusions and Hamilton-Jacobi Bellman Equations Emo Todorov Applied Mathematics and Computer Science & Engineering University of Washington Winter 2014 Emo Todorov (UW) AMATH/CSE 579, Winter
Controlled Diffusions and Hamilton-Jacobi Bellman Equations Emo Todorov Applied Mathematics and Computer Science & Engineering University of Washington Winter 2014 Emo Todorov (UW) AMATH/CSE 579, Winter
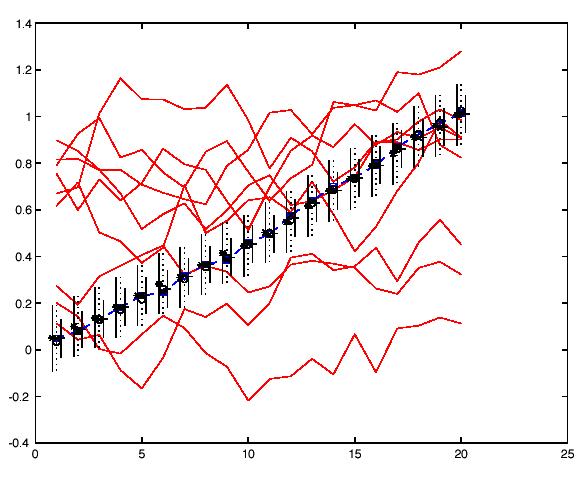
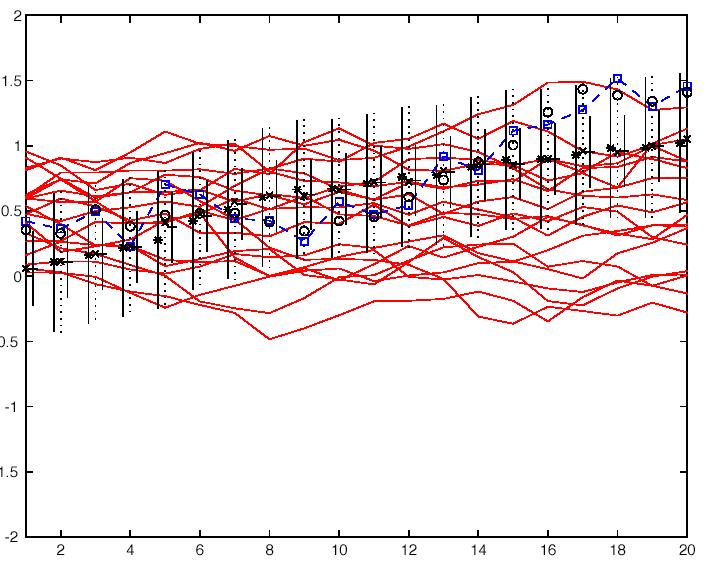
Time Series Prediction by Kalman Smoother with Cross-Validated Noise Density
 Time Series Prediction by Kalman Smoother with Cross-Validated Noise Density Simo Särkkä E-mail: simo.sarkka@hut.fi Aki Vehtari E-mail: aki.vehtari@hut.fi Jouko Lampinen E-mail: jouko.lampinen@hut.fi Abstract
Time Series Prediction by Kalman Smoother with Cross-Validated Noise Density Simo Särkkä E-mail: simo.sarkka@hut.fi Aki Vehtari E-mail: aki.vehtari@hut.fi Jouko Lampinen E-mail: jouko.lampinen@hut.fi Abstract
Motion Estimation (I) Ce Liu Microsoft Research New England
 Ce Liu Microsoft Research New England") Motion Estimation (I) Ce Liu celiu@microsoft.com Microsoft Research New England We live in a moving world Perceiving, understanding and predicting motion is an important part of our daily lives Motion
Motion Estimation (I) Ce Liu celiu@microsoft.com Microsoft Research New England We live in a moving world Perceiving, understanding and predicting motion is an important part of our daily lives Motion
TRACKING and DETECTION in COMPUTER VISION Filtering and edge detection
 Technischen Universität München Winter Semester 0/0 TRACKING and DETECTION in COMPUTER VISION Filtering and edge detection Slobodan Ilić Overview Image formation Convolution Non-liner filtering: Median
Technischen Universität München Winter Semester 0/0 TRACKING and DETECTION in COMPUTER VISION Filtering and edge detection Slobodan Ilić Overview Image formation Convolution Non-liner filtering: Median
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: Extended Kalman Filter Dr. Kostas Alexis (CSE) These slides relied on the lectures from C. Stachniss, J. Sturm and the book Probabilistic Robotics from Thurn et al.
Autonomous Mobile Robot Design Topic: Extended Kalman Filter Dr. Kostas Alexis (CSE) These slides relied on the lectures from C. Stachniss, J. Sturm and the book Probabilistic Robotics from Thurn et al.
Localization. Howie Choset Adapted from slides by Humphrey Hu, Trevor Decker, and Brad Neuman
 Localization Howie Choset Adapted from slides by Humphrey Hu, Trevor Decker, and Brad Neuman Localization General robotic task Where am I? Techniques generalize to many estimation tasks System parameter
Localization Howie Choset Adapted from slides by Humphrey Hu, Trevor Decker, and Brad Neuman Localization General robotic task Where am I? Techniques generalize to many estimation tasks System parameter
Image Alignment and Mosaicing
 Image Alignment and Mosaicing Image Alignment Applications Local alignment: Tracking Stereo Global alignment: Camera jitter elimination Image enhancement Panoramic mosaicing Image Enhancement Original
Image Alignment and Mosaicing Image Alignment Applications Local alignment: Tracking Stereo Global alignment: Camera jitter elimination Image enhancement Panoramic mosaicing Image Enhancement Original
 5.1 2D example 59 Figure 5.1: Parabolic velocity field in a straight two-dimensional pipe. Figure 5.2: Concentration on the input boundary of the pipe. The vertical axis corresponds to r 2 -coordinate,
5.1 2D example 59 Figure 5.1: Parabolic velocity field in a straight two-dimensional pipe. Figure 5.2: Concentration on the input boundary of the pipe. The vertical axis corresponds to r 2 -coordinate,
6.869 Advances in Computer Vision. Prof. Bill Freeman March 1, 2005
 6.869 Advances in Computer Vision Prof. Bill Freeman March 1 2005 1 2 Local Features Matching points across images important for: object identification instance recognition object class recognition pose
6.869 Advances in Computer Vision Prof. Bill Freeman March 1 2005 1 2 Local Features Matching points across images important for: object identification instance recognition object class recognition pose
Human Pose Tracking I: Basics. David Fleet University of Toronto
 Human Pose Tracking I: Basics David Fleet University of Toronto CIFAR Summer School, 2009 Looking at People Challenges: Complex pose / motion People have many degrees of freedom, comprising an articulated
Human Pose Tracking I: Basics David Fleet University of Toronto CIFAR Summer School, 2009 Looking at People Challenges: Complex pose / motion People have many degrees of freedom, comprising an articulated
Robot Localization and Kalman Filters
 Robot Localization and Kalman Filters Rudy Negenborn rudy@negenborn.net August 26, 2003 Outline Robot Localization Probabilistic Localization Kalman Filters Kalman Localization Kalman Localization with
Robot Localization and Kalman Filters Rudy Negenborn rudy@negenborn.net August 26, 2003 Outline Robot Localization Probabilistic Localization Kalman Filters Kalman Localization Kalman Localization with
Lecture 2: From Linear Regression to Kalman Filter and Beyond
 Lecture 2: From Linear Regression to Kalman Filter and Beyond Department of Biomedical Engineering and Computational Science Aalto University January 26, 2012 Contents 1 Batch and Recursive Estimation
Lecture 2: From Linear Regression to Kalman Filter and Beyond Department of Biomedical Engineering and Computational Science Aalto University January 26, 2012 Contents 1 Batch and Recursive Estimation
Comparision of Probabilistic Navigation methods for a Swimming Robot
 Comparision of Probabilistic Navigation methods for a Swimming Robot Anwar Ahmad Quraishi Semester Project, Autumn 2013 Supervisor: Yannic Morel BioRobotics Laboratory Headed by Prof. Aue Jan Ijspeert
Comparision of Probabilistic Navigation methods for a Swimming Robot Anwar Ahmad Quraishi Semester Project, Autumn 2013 Supervisor: Yannic Morel BioRobotics Laboratory Headed by Prof. Aue Jan Ijspeert
Convolutional networks. Sebastian Seung
 Convolutional networks Sebastian Seung Convolutional network Neural network with spatial organization every neuron has a location usually on a grid Translation invariance synaptic strength depends on locations
Convolutional networks Sebastian Seung Convolutional network Neural network with spatial organization every neuron has a location usually on a grid Translation invariance synaptic strength depends on locations
STA 414/2104: Lecture 8
 STA 414/2104: Lecture 8 6-7 March 2017: Continuous Latent Variable Models, Neural networks With thanks to Russ Salakhutdinov, Jimmy Ba and others Outline Continuous latent variable models Background PCA
STA 414/2104: Lecture 8 6-7 March 2017: Continuous Latent Variable Models, Neural networks With thanks to Russ Salakhutdinov, Jimmy Ba and others Outline Continuous latent variable models Background PCA
Space Surveillance with Star Trackers. Part II: Orbit Estimation
 AAS -3 Space Surveillance with Star Trackers. Part II: Orbit Estimation Ossama Abdelkhalik, Daniele Mortari, and John L. Junkins Texas A&M University, College Station, Texas 7783-3 Abstract The problem
AAS -3 Space Surveillance with Star Trackers. Part II: Orbit Estimation Ossama Abdelkhalik, Daniele Mortari, and John L. Junkins Texas A&M University, College Station, Texas 7783-3 Abstract The problem
Time and Spatial Series and Transforms
 Time and Spatial Series and Transforms Z- and Fourier transforms Gibbs' phenomenon Transforms and linear algebra Wavelet transforms Reading: Sheriff and Geldart, Chapter 15 Z-Transform Consider a digitized
Time and Spatial Series and Transforms Z- and Fourier transforms Gibbs' phenomenon Transforms and linear algebra Wavelet transforms Reading: Sheriff and Geldart, Chapter 15 Z-Transform Consider a digitized
Continuous Fourier transform of a Gaussian Function
 Continuous Fourier transform of a Gaussian Function Gaussian function: e t2 /(2σ 2 ) The CFT of a Gaussian function is also a Gaussian function (i.e., time domain is Gaussian, then the frequency domain
Continuous Fourier transform of a Gaussian Function Gaussian function: e t2 /(2σ 2 ) The CFT of a Gaussian function is also a Gaussian function (i.e., time domain is Gaussian, then the frequency domain
Where is the bark, the tree and the forest, mathematical foundations of multi-scale analysis
 Where is the bark, the tree and the forest, mathematical foundations of multi-scale analysis What we observe is not nature itself, but nature exposed to our method of questioning. -Werner Heisenberg M.
Where is the bark, the tree and the forest, mathematical foundations of multi-scale analysis What we observe is not nature itself, but nature exposed to our method of questioning. -Werner Heisenberg M.
L11. EKF SLAM: PART I. NA568 Mobile Robotics: Methods & Algorithms
 L11. EKF SLAM: PART I NA568 Mobile Robotics: Methods & Algorithms Today s Topic EKF Feature-Based SLAM State Representation Process / Observation Models Landmark Initialization Robot-Landmark Correlation
L11. EKF SLAM: PART I NA568 Mobile Robotics: Methods & Algorithms Today s Topic EKF Feature-Based SLAM State Representation Process / Observation Models Landmark Initialization Robot-Landmark Correlation
Lecture 2: From Linear Regression to Kalman Filter and Beyond
 Lecture 2: From Linear Regression to Kalman Filter and Beyond January 18, 2017 Contents 1 Batch and Recursive Estimation 2 Towards Bayesian Filtering 3 Kalman Filter and Bayesian Filtering and Smoothing
Lecture 2: From Linear Regression to Kalman Filter and Beyond January 18, 2017 Contents 1 Batch and Recursive Estimation 2 Towards Bayesian Filtering 3 Kalman Filter and Bayesian Filtering and Smoothing
2D Image Processing (Extended) Kalman and particle filter
 Kalman and particle filter") 2D Image Processing (Extended) Kalman and particle filter Prof. Didier Stricker Dr. Gabriele Bleser Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz
2D Image Processing (Extended) Kalman and particle filter Prof. Didier Stricker Dr. Gabriele Bleser Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz
encoding and estimation bottleneck and limits to visual fidelity
 Retina Light Optic Nerve photoreceptors encoding and estimation bottleneck and limits to visual fidelity interneurons ganglion cells light The Neural Coding Problem s(t) {t i } Central goals for today:
Retina Light Optic Nerve photoreceptors encoding and estimation bottleneck and limits to visual fidelity interneurons ganglion cells light The Neural Coding Problem s(t) {t i } Central goals for today:
Three-way connections and dynamic routing
 Three-way connections and dynamic routing Reference frames require structured representations mapping units Hinton (1981) Which way are the triangles pointing? From Attneave Dynamic routing circuits (Olshausen,
Three-way connections and dynamic routing Reference frames require structured representations mapping units Hinton (1981) Which way are the triangles pointing? From Attneave Dynamic routing circuits (Olshausen,
Machine Learning for OR & FE
 Machine Learning for OR & FE Hidden Markov Models Martin Haugh Department of Industrial Engineering and Operations Research Columbia University Email: martin.b.haugh@gmail.com Additional References: David
Machine Learning for OR & FE Hidden Markov Models Martin Haugh Department of Industrial Engineering and Operations Research Columbia University Email: martin.b.haugh@gmail.com Additional References: David
System identification and sensor fusion in dynamical systems. Thomas Schön Division of Systems and Control, Uppsala University, Sweden.
 System identification and sensor fusion in dynamical systems Thomas Schön Division of Systems and Control, Uppsala University, Sweden. The system identification and sensor fusion problem Inertial sensors
System identification and sensor fusion in dynamical systems Thomas Schön Division of Systems and Control, Uppsala University, Sweden. The system identification and sensor fusion problem Inertial sensors
Tutorial on Blind Source Separation and Independent Component Analysis
 Tutorial on Blind Source Separation and Independent Component Analysis Lucas Parra Adaptive Image & Signal Processing Group Sarnoff Corporation February 09, 2002 Linear Mixtures... problem statement...
Tutorial on Blind Source Separation and Independent Component Analysis Lucas Parra Adaptive Image & Signal Processing Group Sarnoff Corporation February 09, 2002 Linear Mixtures... problem statement...
Tracking for VR and AR
 Tracking for VR and AR Hakan Bilen November 17, 2017 Computer Graphics University of Edinburgh Slide credits: Gordon Wetzstein and Steven M. La Valle 1 Overview VR and AR Inertial Sensors Gyroscopes Accelerometers
Tracking for VR and AR Hakan Bilen November 17, 2017 Computer Graphics University of Edinburgh Slide credits: Gordon Wetzstein and Steven M. La Valle 1 Overview VR and AR Inertial Sensors Gyroscopes Accelerometers
CSC487/2503: Foundations of Computer Vision. Visual Tracking. David Fleet
 CSC487/2503: Foundations of Computer Vision Visual Tracking David Fleet Introduction What is tracking? Major players: Dynamics (model of temporal variation of target parameters) Measurements (relation
CSC487/2503: Foundations of Computer Vision Visual Tracking David Fleet Introduction What is tracking? Major players: Dynamics (model of temporal variation of target parameters) Measurements (relation
Factor Analysis and Kalman Filtering (11/2/04)
") CS281A/Stat241A: Statistical Learning Theory Factor Analysis and Kalman Filtering (11/2/04) Lecturer: Michael I. Jordan Scribes: Byung-Gon Chun and Sunghoon Kim 1 Factor Analysis Factor analysis is used
CS281A/Stat241A: Statistical Learning Theory Factor Analysis and Kalman Filtering (11/2/04) Lecturer: Michael I. Jordan Scribes: Byung-Gon Chun and Sunghoon Kim 1 Factor Analysis Factor analysis is used
Natural Image Statistics
 Natural Image Statistics A probabilistic approach to modelling early visual processing in the cortex Dept of Computer Science Early visual processing LGN V1 retina From the eye to the primary visual cortex
Natural Image Statistics A probabilistic approach to modelling early visual processing in the cortex Dept of Computer Science Early visual processing LGN V1 retina From the eye to the primary visual cortex
Musimathics The Mathematical Foundations of Music Volume 2. Gareth Loy. Foreword by John Chowning
 Musimathics The Mathematical Foundations of Music Volume 2 Gareth Loy Foreword by John Chowning The MIT Press Cambridge, Massachusetts London, England ..2.3.4.5.6.7.8.9.0..2.3.4 2 2. 2.2 2.3 2.4 2.5 2.6
Musimathics The Mathematical Foundations of Music Volume 2 Gareth Loy Foreword by John Chowning The MIT Press Cambridge, Massachusetts London, England ..2.3.4.5.6.7.8.9.0..2.3.4 2 2. 2.2 2.3 2.4 2.5 2.6
Error Analysis in Experimental Physical Science Mini-Version
 Error Analysis in Experimental Physical Science Mini-Version by David Harrison and Jason Harlow Last updated July 13, 2012 by Jason Harlow. Original version written by David M. Harrison, Department of
Error Analysis in Experimental Physical Science Mini-Version by David Harrison and Jason Harlow Last updated July 13, 2012 by Jason Harlow. Original version written by David M. Harrison, Department of
Spacetime and 4 vectors
 Spacetime and 4 vectors 1 Minkowski space = 4 dimensional spacetime Euclidean 4 space Each point in Minkowski space is an event. In SR, Minkowski space is an absolute structure (like space in Newtonian
Spacetime and 4 vectors 1 Minkowski space = 4 dimensional spacetime Euclidean 4 space Each point in Minkowski space is an event. In SR, Minkowski space is an absolute structure (like space in Newtonian
Robotics 2 Target Tracking. Giorgio Grisetti, Cyrill Stachniss, Kai Arras, Wolfram Burgard
 Robotics 2 Target Tracking Giorgio Grisetti, Cyrill Stachniss, Kai Arras, Wolfram Burgard Linear Dynamical System (LDS) Stochastic process governed by is the state vector is the input vector is the process
Robotics 2 Target Tracking Giorgio Grisetti, Cyrill Stachniss, Kai Arras, Wolfram Burgard Linear Dynamical System (LDS) Stochastic process governed by is the state vector is the input vector is the process
Feature extraction: Corners and blobs
 Feature extraction: Corners and blobs Review: Linear filtering and edge detection Name two different kinds of image noise Name a non-linear smoothing filter What advantages does median filtering have over
Feature extraction: Corners and blobs Review: Linear filtering and edge detection Name two different kinds of image noise Name a non-linear smoothing filter What advantages does median filtering have over
Reading. 3. Image processing. Pixel movement. Image processing Y R I G Q
 Reading Jain, Kasturi, Schunck, Machine Vision. McGraw-Hill, 1995. Sections 4.-4.4, 4.5(intro), 4.5.5, 4.5.6, 5.1-5.4. 3. Image processing 1 Image processing An image processing operation typically defines
Reading Jain, Kasturi, Schunck, Machine Vision. McGraw-Hill, 1995. Sections 4.-4.4, 4.5(intro), 4.5.5, 4.5.6, 5.1-5.4. 3. Image processing 1 Image processing An image processing operation typically defines
Using the Kalman Filter for SLAM AIMS 2015
 Using the Kalman Filter for SLAM AIMS 2015 Contents Trivial Kinematics Rapid sweep over localisation and mapping (components of SLAM) Basic EKF Feature Based SLAM Feature types and representations Implementation
Using the Kalman Filter for SLAM AIMS 2015 Contents Trivial Kinematics Rapid sweep over localisation and mapping (components of SLAM) Basic EKF Feature Based SLAM Feature types and representations Implementation
Space Surveillance using Star Trackers. Part I: Simulations
 AAS 06-231 Space Surveillance using Star Trackers. Part I: Simulations Iohan Ettouati, Daniele Mortari, and Thomas Pollock Texas A&M University, College Station, Texas 77843-3141 Abstract This paper presents
AAS 06-231 Space Surveillance using Star Trackers. Part I: Simulations Iohan Ettouati, Daniele Mortari, and Thomas Pollock Texas A&M University, College Station, Texas 77843-3141 Abstract This paper presents
Neural networks and optimization
 Neural networks and optimization Nicolas Le Roux INRIA 8 Nov 2011 Nicolas Le Roux (INRIA) Neural networks and optimization 8 Nov 2011 1 / 80 1 Introduction 2 Linear classifier 3 Convolutional neural networks
Neural networks and optimization Nicolas Le Roux INRIA 8 Nov 2011 Nicolas Le Roux (INRIA) Neural networks and optimization 8 Nov 2011 1 / 80 1 Introduction 2 Linear classifier 3 Convolutional neural networks
Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems
 Robots for People --- A project for intelligent integrated systems") 1 Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems V. Estivill-Castro 2 Uncertainty representation Localization Chapter 5 (textbook) What is the course about?
1 Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems V. Estivill-Castro 2 Uncertainty representation Localization Chapter 5 (textbook) What is the course about?
Mobile Robot Localization
 Mobile Robot Localization 1 The Problem of Robot Localization Given a map of the environment, how can a robot determine its pose (planar coordinates + orientation)? Two sources of uncertainty: - observations
Mobile Robot Localization 1 The Problem of Robot Localization Given a map of the environment, how can a robot determine its pose (planar coordinates + orientation)? Two sources of uncertainty: - observations
Introduction to Signal Processing
 to Signal Processing Davide Bacciu Dipartimento di Informatica Università di Pisa bacciu@di.unipi.it Intelligent Systems for Pattern Recognition Signals = Time series Definitions Motivations A sequence
to Signal Processing Davide Bacciu Dipartimento di Informatica Università di Pisa bacciu@di.unipi.it Intelligent Systems for Pattern Recognition Signals = Time series Definitions Motivations A sequence
Robotics 2 Target Tracking. Kai Arras, Cyrill Stachniss, Maren Bennewitz, Wolfram Burgard
 Robotics 2 Target Tracking Kai Arras, Cyrill Stachniss, Maren Bennewitz, Wolfram Burgard Slides by Kai Arras, Gian Diego Tipaldi, v.1.1, Jan 2012 Chapter Contents Target Tracking Overview Applications
Robotics 2 Target Tracking Kai Arras, Cyrill Stachniss, Maren Bennewitz, Wolfram Burgard Slides by Kai Arras, Gian Diego Tipaldi, v.1.1, Jan 2012 Chapter Contents Target Tracking Overview Applications
Partially Observable Markov Decision Processes (POMDPs)
") Partially Observable Markov Decision Processes (POMDPs) Sachin Patil Guest Lecture: CS287 Advanced Robotics Slides adapted from Pieter Abbeel, Alex Lee Outline Introduction to POMDPs Locally Optimal Solutions
Partially Observable Markov Decision Processes (POMDPs) Sachin Patil Guest Lecture: CS287 Advanced Robotics Slides adapted from Pieter Abbeel, Alex Lee Outline Introduction to POMDPs Locally Optimal Solutions
The Kalman Filter (part 1) Definition. Rudolf Emil Kalman. Why do we need a filter? Definition. HCI/ComS 575X: Computational Perception.
 Definition. Rudolf Emil Kalman. Why do we need a filter? Definition. HCI/ComS 575X: Computational Perception.") The Kalman Filter (part 1) HCI/ComS 575X: Computational Perception Instructor: Alexander Stoytchev http://www.cs.iastate.edu/~alex/classes/2007_spring_575x/ March 5, 2007 HCI/ComS 575X: Computational Perception
The Kalman Filter (part 1) HCI/ComS 575X: Computational Perception Instructor: Alexander Stoytchev http://www.cs.iastate.edu/~alex/classes/2007_spring_575x/ March 5, 2007 HCI/ComS 575X: Computational Perception
Probabilistic Graphical Models
 Probabilistic Graphical Models Brown University CSCI 2950-P, Spring 2013 Prof. Erik Sudderth Lecture 12: Gaussian Belief Propagation, State Space Models and Kalman Filters Guest Kalman Filter Lecture by
Probabilistic Graphical Models Brown University CSCI 2950-P, Spring 2013 Prof. Erik Sudderth Lecture 12: Gaussian Belief Propagation, State Space Models and Kalman Filters Guest Kalman Filter Lecture by
L7: Linear prediction of speech
 L7: Linear prediction of speech Introduction Linear prediction Finding the linear prediction coefficients Alternative representations This lecture is based on [Dutoit and Marques, 2009, ch1; Taylor, 2009,
L7: Linear prediction of speech Introduction Linear prediction Finding the linear prediction coefficients Alternative representations This lecture is based on [Dutoit and Marques, 2009, ch1; Taylor, 2009,
Artificial Intelligence
 Artificial Intelligence Roman Barták Department of Theoretical Computer Science and Mathematical Logic Summary of last lecture We know how to do probabilistic reasoning over time transition model P(X t
Artificial Intelligence Roman Barták Department of Theoretical Computer Science and Mathematical Logic Summary of last lecture We know how to do probabilistic reasoning over time transition model P(X t
Particle Filters; Simultaneous Localization and Mapping (Intelligent Autonomous Robotics) Subramanian Ramamoorthy School of Informatics
 Subramanian Ramamoorthy School of Informatics") Particle Filters; Simultaneous Localization and Mapping (Intelligent Autonomous Robotics) Subramanian Ramamoorthy School of Informatics Recap: State Estimation using Kalman Filter Project state and error
Particle Filters; Simultaneous Localization and Mapping (Intelligent Autonomous Robotics) Subramanian Ramamoorthy School of Informatics Recap: State Estimation using Kalman Filter Project state and error
Lecture 6: Bayesian Inference in SDE Models
 Lecture 6: Bayesian Inference in SDE Models Bayesian Filtering and Smoothing Point of View Simo Särkkä Aalto University Simo Särkkä (Aalto) Lecture 6: Bayesian Inference in SDEs 1 / 45 Contents 1 SDEs
Lecture 6: Bayesian Inference in SDE Models Bayesian Filtering and Smoothing Point of View Simo Särkkä Aalto University Simo Särkkä (Aalto) Lecture 6: Bayesian Inference in SDEs 1 / 45 Contents 1 SDEs
2D Image Processing. Bayes filter implementation: Kalman filter
 2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
Achieving scale covariance
 Achieving scale covariance Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region size that is covariant
Achieving scale covariance Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region size that is covariant
Feature detectors and descriptors. Fei-Fei Li
 Feature detectors and descriptors Fei-Fei Li Feature Detection e.g. DoG detected points (~300) coordinates, neighbourhoods Feature Description e.g. SIFT local descriptors (invariant) vectors database of
Feature detectors and descriptors Fei-Fei Li Feature Detection e.g. DoG detected points (~300) coordinates, neighbourhoods Feature Description e.g. SIFT local descriptors (invariant) vectors database of
Gaussian Processes for Audio Feature Extraction
 Gaussian Processes for Audio Feature Extraction Dr. Richard E. Turner (ret26@cam.ac.uk) Computational and Biological Learning Lab Department of Engineering University of Cambridge Machine hearing pipeline
Gaussian Processes for Audio Feature Extraction Dr. Richard E. Turner (ret26@cam.ac.uk) Computational and Biological Learning Lab Department of Engineering University of Cambridge Machine hearing pipeline
Computer Vision & Digital Image Processing
 Computer Vision & Digital Image Processing Image Restoration and Reconstruction I Dr. D. J. Jackson Lecture 11-1 Image restoration Restoration is an objective process that attempts to recover an image
Computer Vision & Digital Image Processing Image Restoration and Reconstruction I Dr. D. J. Jackson Lecture 11-1 Image restoration Restoration is an objective process that attempts to recover an image
Chapter 2 Motion in One Dimension. Slide 2-1
 Chapter 2 Motion in One Dimension Slide 2-1 MasteringPhysics, PackBack Answers You should be on both by now. MasteringPhysics first reading quiz Wednesday PackBack should have email & be signed up 2014
Chapter 2 Motion in One Dimension Slide 2-1 MasteringPhysics, PackBack Answers You should be on both by now. MasteringPhysics first reading quiz Wednesday PackBack should have email & be signed up 2014
Hidden Markov Models
 Hidden Markov Models Slides mostly from Mitch Marcus and Eric Fosler (with lots of modifications). Have you seen HMMs? Have you seen Kalman filters? Have you seen dynamic programming? HMMs are dynamic
Hidden Markov Models Slides mostly from Mitch Marcus and Eric Fosler (with lots of modifications). Have you seen HMMs? Have you seen Kalman filters? Have you seen dynamic programming? HMMs are dynamic
Assessment of the orbits from the 1st IGS reprocessing campaign
 Assessment of the orbits from the 1st IGS reprocessing campaign results from combined reprocessed IGS GPS orbits and EOPs assessment of IG1 orbit repeatability items to consider for next reprocessing Jake
Assessment of the orbits from the 1st IGS reprocessing campaign results from combined reprocessed IGS GPS orbits and EOPs assessment of IG1 orbit repeatability items to consider for next reprocessing Jake
If x = 180 then the arc subtended by x is a semicircle which we know has length πr. Now we argue that:
 Arclength Consider a circle of radius r and an angle of x degrees as shown in the figure below. The segment of the circle opposite the angle x is called the arc subtended by x. We need a formula for its
Arclength Consider a circle of radius r and an angle of x degrees as shown in the figure below. The segment of the circle opposite the angle x is called the arc subtended by x. We need a formula for its
STA 414/2104: Lecture 8
 STA 414/2104: Lecture 8 6-7 March 2017: Continuous Latent Variable Models, Neural networks Delivered by Mark Ebden With thanks to Russ Salakhutdinov, Jimmy Ba and others Outline Continuous latent variable
STA 414/2104: Lecture 8 6-7 March 2017: Continuous Latent Variable Models, Neural networks Delivered by Mark Ebden With thanks to Russ Salakhutdinov, Jimmy Ba and others Outline Continuous latent variable
Probabilistic Graphical Models
 Probabilistic Graphical Models Lecture 12 Dynamical Models CS/CNS/EE 155 Andreas Krause Homework 3 out tonight Start early!! Announcements Project milestones due today Please email to TAs 2 Parameter learning
Probabilistic Graphical Models Lecture 12 Dynamical Models CS/CNS/EE 155 Andreas Krause Homework 3 out tonight Start early!! Announcements Project milestones due today Please email to TAs 2 Parameter learning
UCSD SIO221c: (Gille) 1
 1") UCSD SIO221c: (Gille) 1 Edge effects in spectra: detrending, windowing and pre-whitening One of the big challenges in computing spectra is to figure out how to deal with edge effects. Edge effects matter
UCSD SIO221c: (Gille) 1 Edge effects in spectra: detrending, windowing and pre-whitening One of the big challenges in computing spectra is to figure out how to deal with edge effects. Edge effects matter
From Bayes to Extended Kalman Filter
 From Bayes to Extended Kalman Filter Michal Reinštein Czech Technical University in Prague Faculty of Electrical Engineering, Department of Cybernetics Center for Machine Perception http://cmp.felk.cvut.cz/
From Bayes to Extended Kalman Filter Michal Reinštein Czech Technical University in Prague Faculty of Electrical Engineering, Department of Cybernetics Center for Machine Perception http://cmp.felk.cvut.cz/
BME 50500: Image and Signal Processing in Biomedicine. Lecture 5: Correlation and Power-Spectrum CCNY
 1 BME 50500: Image and Signal Processing in Biomedicine Lecture 5: Correlation and Power-Spectrum Lucas C. Parra Biomedical Engineering Department CCNY http://bme.ccny.cuny.edu/faculty/parra/teaching/signal-and-image/
1 BME 50500: Image and Signal Processing in Biomedicine Lecture 5: Correlation and Power-Spectrum Lucas C. Parra Biomedical Engineering Department CCNY http://bme.ccny.cuny.edu/faculty/parra/teaching/signal-and-image/
Miscellaneous. Regarding reading materials. Again, ask questions (if you have) and ask them earlier
 and ask them earlier") Miscellaneous Regarding reading materials Reading materials will be provided as needed If no assigned reading, it means I think the material from class is sufficient Should be enough for you to do your
Miscellaneous Regarding reading materials Reading materials will be provided as needed If no assigned reading, it means I think the material from class is sufficient Should be enough for you to do your
Data Assimilation: Finding the Initial Conditions in Large Dynamical Systems. Eric Kostelich Data Mining Seminar, Feb. 6, 2006
 Data Assimilation: Finding the Initial Conditions in Large Dynamical Systems Eric Kostelich Data Mining Seminar, Feb. 6, 2006 kostelich@asu.edu Co-Workers Istvan Szunyogh, Gyorgyi Gyarmati, Ed Ott, Brian
Data Assimilation: Finding the Initial Conditions in Large Dynamical Systems Eric Kostelich Data Mining Seminar, Feb. 6, 2006 kostelich@asu.edu Co-Workers Istvan Szunyogh, Gyorgyi Gyarmati, Ed Ott, Brian
CODING SAMPLE DIFFERENCES ATTEMPT 1: NAIVE DIFFERENTIAL CODING
 5 0 DPCM (Differential Pulse Code Modulation) Making scalar quantization work for a correlated source -- a sequential approach. Consider quantizing a slowly varying source (AR, Gauss, ρ =.95, σ 2 = 3.2).
5 0 DPCM (Differential Pulse Code Modulation) Making scalar quantization work for a correlated source -- a sequential approach. Consider quantizing a slowly varying source (AR, Gauss, ρ =.95, σ 2 = 3.2).
Unstable Oscillations!
 Unstable Oscillations X( t ) = [ A 0 + A( t ) ] sin( ω t + Φ 0 + Φ( t ) ) Amplitude modulation: A( t ) Phase modulation: Φ( t ) S(ω) S(ω) Special case: C(ω) Unstable oscillation has a broader periodogram
Unstable Oscillations X( t ) = [ A 0 + A( t ) ] sin( ω t + Φ 0 + Φ( t ) ) Amplitude modulation: A( t ) Phase modulation: Φ( t ) S(ω) S(ω) Special case: C(ω) Unstable oscillation has a broader periodogram
Gaussian Processes for Sequential Prediction
 Gaussian Processes for Sequential Prediction Michael A. Osborne Machine Learning Research Group Department of Engineering Science University of Oxford Gaussian processes are useful for sequential data,
Gaussian Processes for Sequential Prediction Michael A. Osborne Machine Learning Research Group Department of Engineering Science University of Oxford Gaussian processes are useful for sequential data,
SENSOR-ASSISTED ADAPTIVE MOTOR CONTROL UNDER CONTINUOUSLY VARYING CONTEXT
 SENSOR-ASSISTED ADAPTIVE MOTOR CONTROL UNDER CONTINUOUSLY VARYING CONTEXT Heiko Hoffmann, Georgios Petkos, Sebastian Bitzer, and Sethu Vijayakumar Institute of Perception, Action and Behavior, School of
SENSOR-ASSISTED ADAPTIVE MOTOR CONTROL UNDER CONTINUOUSLY VARYING CONTEXT Heiko Hoffmann, Georgios Petkos, Sebastian Bitzer, and Sethu Vijayakumar Institute of Perception, Action and Behavior, School of
Lecture 4 - Spectral Estimation
 Lecture 4 - Spectral Estimation The Discrete Fourier Transform The Discrete Fourier Transform (DFT) is the equivalent of the continuous Fourier Transform for signals known only at N instants separated
Lecture 4 - Spectral Estimation The Discrete Fourier Transform The Discrete Fourier Transform (DFT) is the equivalent of the continuous Fourier Transform for signals known only at N instants separated
Kalman filtering and friends: Inference in time series models. Herke van Hoof slides mostly by Michael Rubinstein
 Kalman filtering and friends: Inference in time series models Herke van Hoof slides mostly by Michael Rubinstein Problem overview Goal Estimate most probable state at time k using measurement up to time
Kalman filtering and friends: Inference in time series models Herke van Hoof slides mostly by Michael Rubinstein Problem overview Goal Estimate most probable state at time k using measurement up to time
Reverberation Impulse Response Analysis
 MUS424: Signal Processing Techniques for Digital Audio Effects Handout #18 Jonathan Abel, David Berners April 27, 24 Lecture #9: April 27, 24 Lecture Notes 7 Reverberation Impulse Response Analysis 1 CCRMA
MUS424: Signal Processing Techniques for Digital Audio Effects Handout #18 Jonathan Abel, David Berners April 27, 24 Lecture #9: April 27, 24 Lecture Notes 7 Reverberation Impulse Response Analysis 1 CCRMA
Gaussians. Pieter Abbeel UC Berkeley EECS. Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics
 Gaussians Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Outline Univariate Gaussian Multivariate Gaussian Law of Total Probability Conditioning
Gaussians Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Outline Univariate Gaussian Multivariate Gaussian Law of Total Probability Conditioning
Lecture 6: Edge Detection. CAP 5415: Computer Vision Fall 2008
 Lecture 6: Edge Detection CAP 5415: Computer Vision Fall 2008 Announcements PS 2 is available Please read it by Thursday During Thursday lecture, I will be going over it in some detail Monday - Computer
Lecture 6: Edge Detection CAP 5415: Computer Vision Fall 2008 Announcements PS 2 is available Please read it by Thursday During Thursday lecture, I will be going over it in some detail Monday - Computer
Detecting and Manipulating Musical Rhythms
 Detecting and Manipulating Musical Rhythms Beat tracking methods attempt to automatically synchronize to complex nonperiodic (yet repetitive) waveforms; to create an algorithm that can tap its foot in
Detecting and Manipulating Musical Rhythms Beat tracking methods attempt to automatically synchronize to complex nonperiodic (yet repetitive) waveforms; to create an algorithm that can tap its foot in
COMP344 Digital Image Processing Fall 2007 Final Examination
 COMP344 Digital Image Processing Fall 2007 Final Examination Time allowed: 2 hours Name Student ID Email Question 1 Question 2 Question 3 Question 4 Question 5 Question 6 Total With model answer HK University
COMP344 Digital Image Processing Fall 2007 Final Examination Time allowed: 2 hours Name Student ID Email Question 1 Question 2 Question 3 Question 4 Question 5 Question 6 Total With model answer HK University
Sensor Tasking and Control
 Sensor Tasking and Control Sensing Networking Leonidas Guibas Stanford University Computation CS428 Sensor systems are about sensing, after all... System State Continuous and Discrete Variables The quantities
Sensor Tasking and Control Sensing Networking Leonidas Guibas Stanford University Computation CS428 Sensor systems are about sensing, after all... System State Continuous and Discrete Variables The quantities