Robotics 2 Target Tracking. Kai Arras, Cyrill Stachniss, Maren Bennewitz, Wolfram Burgard
|
|
|
- Nicholas Stevens
- 6 years ago
- Views:
Transcription


1 Robotics 2 Target Tracking Kai Arras, Cyrill Stachniss, Maren Bennewitz, Wolfram Burgard Slides by Kai Arras, Gian Diego Tipaldi, v.1.1, Jan 2012
2 Chapter Contents Target Tracking Overview Applications Types of Problems and Errors Algorithms Linear Discrete Systems (LDS) Kalman Filter (KF) Overview Error Propagation Esimation Cycle Limitations Extended Kalman Filter (EKF) Overview First-Order Error Propagation Tracking Example
3 Target Tracking Overview Tracking is the estimation of the state of a moving object based on remote measurements. [Bar-Shalom] Detection is knowing the presence of an object (possibly with some attribute information) Tracking is maintaining the state and identity of an object over time despite detection errors (false negatives, false alarms), occlusions, and the presence of other objects


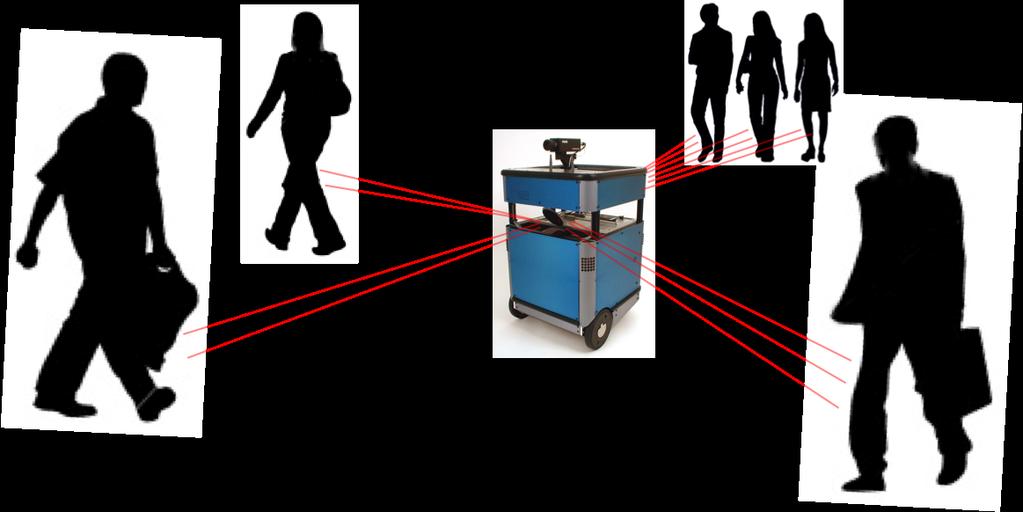


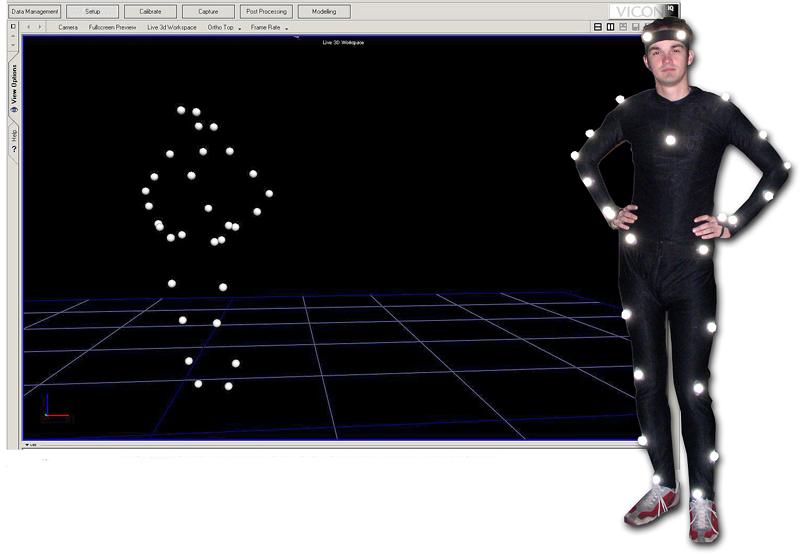
4 Target Tracking Applications Fleet Management Surveillance Air Traffic Control Motion Capture Military Applications Robotics, HRI
5 Tracking: Problem Types Track stage Track formation (initialization) Track maintenance (continuation) Number of sensors Single sensor Multiple sensors Sensor characteristics Detection probability (PD) False alarm rate (PF) Target behavior Nonmaneuvering Maneuvering Number of targets Single target Multiple targets Target size Point-like target Extended target
6 Tracking: Error Types 1. Uncertainty in the values of measurements: Called noise Solution: Filtering (State estimation theory) 2. Uncertainty in the origin of measurements: measurement might originate from sources different from the target of interest. Reasons : False alarms Decoys and countermeasures Multiple targets Solution: Data Association (Statistical decision theory)
7 Tracking: Problem Statement Given Model of the system dynamics (process or plant model). Decribes the evolution of the state Model of the sensor with which the target is observed Probabilistic models of the random factors (noise sources) and the prior information Wanted System state estimate such as kinematic (e.g. position), feature (e.g. target class) or parameters components In a way that... Accuracy and/or reliability is higher than the raw measurements Contains information not available in the measurements
8 Tracking Algorithms Single non-maneuvering target, no origin uncert. Kalman filter (KF)/Extended Kalman filter (EKF) Single maneuvering target, no origin uncertainty KF/EKF with variable process noise Muliple model approaches (MM) Single non-maneuvering target, origin uncertainty KF/EKF with Nearest/Strongest Neighbor Data Association Probabilistic Data Association filter (PDAF) Single maneuvering target, origin uncertainty Multiple model-pdaf
9 Tracking Algorithms Multiple non-maneuvering targets Joint Probabilistic Data Association filter (JPDAF) Multiple Hypothesis Tracker (MHT) Multiple maneuvering targets MM-variants of MHT (e.g. IMMMHT) Other Bayesian filtering schemes such as Particle filters have also been sucessfully applied to the tracking problem
10 Linear Dynamic System (LDS) A continuous-time Linear Dynamic System (LDS) can be described by a state equation of the form Called process or plant model The system can be observed remotely through Called observation or measurement model This is the State-Space Representation, omnipresent in physics, control or estimation theory Provides the mathematical formulation for our estimation task
11 Linear Dynamic System (LDS) Stochastic process governed by is the state vector is the input vector is the process noise is the system matrix is the input gain The system can be observed through is the measurement vector is the measurement noise is the measurement matrix
12 Discrete-Time LDS Continuous model are difficult to realize Algorithms work at discrete time steps Measurements are acquired with certain rates In practice, discrete models are employed Discrete-time LDS are governed by is the state transition matrix is the discrete-time input gain Same observation function of continuous models
13 Discrete-Time LDS Continuous model are difficult to realize Algorithms work at discrete time steps Measurements are acquired with certain rates In practice, discrete models are employed Discrete-time LDS are governed by In target tracking, the input is unknown! is the state transition matrix is the discrete-time input gain Same observation function of continuous models
14 LDS Example Throwing ball We want to throw a ball and compute its trajectory This can be easily done with a LDS No uncertainties, no tracking, just physics The ball s state shall be represented as We ignore winds but consider the gravity force g No floor constraints We observe the ball with a noise-free position sensor
 Measurement vector Measurement")
15 LDS Example Throwing ball Throwing a ball from s with initial velocity v Consider only the gravity force, g, of the ball y o s v x State vector Process matrices Initial state Input vector (scalar) Measurement vector Measurement matrix
16 LDS Example Throwing ball Initial State No noise
17 LDS Example Throwing ball System evolution Observations
18 LDS Example Throwing ball System evolution Observations
19 LDS Example Throwing ball System evolution Observations
20 LDS Example Throwing ball System evolution Observations
21 LDS Example Throwing ball System evolution Observations
22 LDS Example Throwing ball System evolution Observations
23 LDS Example Throwing ball System evolution Observations
24 LDS Example Throwing ball System evolution Observations
25 LDS Example Throwing ball System evolution Observations
26 LDS Example Throwing ball System evolution Observations
27 LDS Example Throwing ball System evolution Observations
28 LDS Example Throwing ball System evolution Observations
29 LDS Example Throwing ball Initial State It s windy and our sensor is imperfect: let s add Gaussian process and observation noise
30 LDS Example Throwing ball System evolution Observations
31 LDS Example Throwing ball System evolution Observations
32 LDS Example Throwing ball System evolution Observations
33 LDS Example Throwing ball System evolution Observations
34 LDS Example Throwing ball System evolution Observations
35 LDS Example Throwing ball System evolution Observations
36 LDS Example Throwing ball System evolution Observations
37 LDS Example Throwing ball System evolution Observations
38 LDS Example Throwing ball System evolution Observations
39 LDS Example Throwing ball System evolution Observations
40 LDS Example Throwing ball System evolution Observations
41 LDS Example Throwing ball System evolution Observations
42 Kalman Filter (KF) The Kalman filter is the workhorse of tracking Under linear Gaussian assumptions, the KF is the optimal minimum mean squared error (MMSE) estimator. It is still the optimal linear MMSE estimator if these conditions are not met An optimal estimator is an algorithm that processes observations to yield a state estimate that minimizes a certain error criterion (e.g. RMS, MSE) It is basically a (recursive) weighted sum of the prediction and observation. The weights are given by the process and the measurement covariances See literature for detailed tutorials
43 Kalman Filter (KF) Consider a discrete time LDS with dynamic model where is the process noise (no input assumed) The measurement model is where is the measurement noise The initial state is generally unknown and modeled as a Gaussian random variable State estimate Covariance estimate
44 Kalman Filter State Prediction Measurement Prediction Update
45 EKF: Error Propagation Error Propagation is everywhere in Kalman filtering From the uncertain previous state to the next state over the system dynamics From the uncertain inputs to the state over the input gain relationship From the uncertain predicted state to the predicted measurements over the measurement model
46 Error Propagation Law Given A linear system Y = F X X X, Y assumed to be Gaussian Input covariance matrix C X System matrix F X the Error Propagation Law computes the output covariance matrix C Y 46
47 Error Propagation Law Derivation in Matrix Notation Blackboard... 47
48 Error Propagation Law Derivation in Matrix Notation 48
49 Kalman Filter Cycle
50 Kalman Filter Cycle motion model predicted state posterior state innovation from matched landmarks observation model predicted measurements in sensor coordinates targets raw sensory data
51 KF Cycle 1/4: State prediction State prediction In target tracking, no a priori knowledge of the dynamic equation is generally available Instead, different motion models (MM) are used Brownian MM Constant velocity MM Constant acceleration MM Constant turn MM Specialized models (problem-related, e.g. ship models)
52 Motion Models: Brownian No-motion assumption Useful to describe stop-and-go motion behavior State representation Ball example Initial state Transition matrix
53 Motion Models: Brownian No-motion assumption Useful to describe stop-and-go motion behavior State representation Ball example Initial state Transition matrix State prediction: Uncertainty grows
54 Motion Models: Brownian No-motion assumption Useful to describe stop-and-go motion behavior State representation Ball example Initial state Transition matrix State prediction: Uncertainty grows
55 Motion Models: Brownian No-motion assumption Useful to describe stop-and-go motion behavior State representation Ball example Initial state Transition matrix State prediction: Uncertainty grows
56 Motion Models: Brownian No-motion assumption Useful to describe stop-and-go motion behavior State representation Ball example Initial state Transition matrix State prediction: Uncertainty grows
57 MMs: Constant Velocity Constant target velocity assumption Useful to model smooth target motion State representation Ball example Initial state Transition matrix
58 MMs: Constant Velocity Constant target velocity assumption Useful to model smooth target motion State representation Ball example Initial state Transition matrix State prediction: Linear target motion Uncertainty grows
59 MMs: Constant Velocity Constant target velocity assumption Useful to model smooth target motion State representation Ball example Initial state Transition matrix State prediction: Linear target motion Uncertainty grows
60 MMs: Constant Velocity Constant target velocity assumption Useful to model smooth target motion State representation Ball example Initial state Transition matrix State prediction: Linear target motion Uncertainty grows
61 MMs: Constant Velocity Constant target velocity assumption Useful to model smooth target motion State representation Ball example Initial state Transition matrix State prediction: Linear target motion Uncertainty grows
62 MMs: Constant Acceleration Constant target acceleration assumed Useful to model target motion that is smooth in position and velocity changes State representation Ball example Initial state Transition matrix
63 MMs: Constant Acceleration Constant target acceleration assumed Useful to model target motion that is smooth in position and velocity changes State representation Ball example Initial state Transition matrix State prediction: Non-linear motion Uncertainty grows
64 MMs: Constant Acceleration Constant target acceleration assumed Useful to model target motion that is smooth in position and velocity changes State representation Ball example Initial state Transition matrix State prediction: Non-linear motion Uncertainty grows
65 MMs: Constant Acceleration Constant target acceleration assumed Useful to model target motion that is smooth in position and velocity changes State representation Ball example Initial state Transition matrix State prediction: Non-linear motion Uncertainty grows
66 MMs: Constant Acceleration Constant target acceleration assumed Useful to model target motion that is smooth in position and velocity changes State representation Ball example Initial state Transition matrix State prediction: Non-linear motion Uncertainty grows
67 MMs: Constant Acceleration Constant target acceleration assumed Useful to model target motion that is smooth in position and velocity changes State representation Ball example Initial state Transition matrix
68 MMs: Constant Acceleration Constant target acceleration assumed Useful to model target motion that is smooth in position and velocity changes State representation Ball example Initial state Transition matrix State prediction: Non-linear motion Uncertainty grows
69 MMs: Constant Acceleration Constant target acceleration assumed Useful to model target motion that is smooth in position and velocity changes State representation Ball example Initial state Transition matrix State prediction: Non-linear motion Uncertainty grows
70 MMs: Constant Acceleration Constant target acceleration assumed Useful to model target motion that is smooth in position and velocity changes State representation Ball example Initial state Transition matrix State prediction: Non-linear motion Uncertainty grows
71 MMs: Constant Acceleration Constant target acceleration assumed Useful to model target motion that is smooth in position and velocity changes State representation Ball example Initial state Transition matrix State prediction: Non-linear motion Uncertainty grows
72 KF Cycle 2/4: Meas. Prediction Measurement prediction Observation Typically, only the target position is observed. The measurement matrix is then Note: One can also observe Velocity (Doppler radar) Acceleration (accelerometers)
73 KF Cycle 3/4: Data Association Once measurements are predicted and observed, we have to associate them with each other This is resolving the origin uncertainty of observations Data association is typically done in the sensor reference frame Data association can be a hard problem and many advanced techniques exist More on this later in this course
74 KF Cycle 3/4: Data Association Step 1: Compute the pairing difference and its associated uncertainty The difference between predicted measurement and observation is called innovation The associated covariance estimate is called the innovation covariance The prediction-observation pair is often called pairing
75 KF Cycle 3/4: Data Association Step 2: Check if the pairing is statistically compatible Compute the Mahalanobis distance Compare it against the proper threshold from an cumulative ( chi square ) distribution Significance level Degrees of freedom Compatibility on level α is finally given if this is true
76 KF Cycle 3/4: Data Association Constant velocity model Process noise Measurement noise No false alarm No problem
77 KF Cycle 3/4: Data Association Constant velocity model Process noise Measurement noise Uniform false alarm False alarm rate = 3 Ambiguity: several observations in the validation gate
78 KF Cycle 3/4: Data Association Constant velocity model Process noise Measurement noise Uniform false alarm False alarm rate = 3 Wrong association as closest observation is false alarm
79 KF Cycle 4/4: Update Computation of the Kalman gain State and state covariance update


80 KF Cycle 4/4: Update prediction measurement correction It's a weighted mean! 80


81 Kalman Filter Cycle motion model predicted state posterior state innovation from matched landmarks observation model predicted measurements in sensor coordinates targets raw sensory data
82 Kalman Filter: Limitations Non-linear motion models and/or non-linear measurement models Extended Kalman filter Unknown inputs into the dynamic process model (values and modes) Enlarged process noise (simple but there are implications) Multiple model approaches (accounts for mode changes) Uncertain origin of measurements Data Association How many targets are there? Track formation and deletion techniques Multiple Hypothesis Tracker (MHT)
83 Extended Kalman Filter The Extended Kalman filter deals with non-linear process and non-linear measurement models Consider a discrete time LDS with dynamic model where is the process noise (no input assumed) The measurement model is where is the measurement noise The same KF-assumptions for the initial state
84 Kalman Filter State Prediction Measurement Prediction Update
85 Extended Kalman Filter State Prediction Jacobian Measurement Prediction Jacobian Update
86 First-Order Error Propagation Given A non-linear system Y = f(x) X,Y assumed to be Gaussian Input covariance matrix C X Jacobian matrix F X the Error Propagation Law computes the output covariance matrix C Y 86
87 First-Order Error Propagation Approximating f(x) by a first-order Taylor series expansion about the point X = µ X 87
88 Jacobian Matrix It s a non-square matrix in general Suppose you have a vector-valued function Let the gradient operator be the vector of (first-order) partial derivatives Then, the Jacobian matrix is defined as 88


89 Jacobian Matrix It s the orientation of the tangent plane to the vectorvalued function at a given point Generalizes the gradient of a scalar valued function 89
90 Track Management Formation When to create a new track? What is the initial state? Occlusion/deletion When to delete a track? Is it just occluded? Heuristics: Greedy initialization Every observation not associated is a new track Initialize only position Lazy initialization Accumulate several unassociated observations Initialize position & velocity Heuristics: Greedy deletion Delete if no observation can be associated No occlusion handling Lazy deletion Delete if no observation can be associated for several time steps Implicit occlusion handling
91 Example: Tracking the Ball Unlike the previous experiment in which we had a model of the ball s trajectory and just observed it, we now want to track the ball Comparison: small versus large process noise Q and the effect of the three different motion models For simplicity, we perform no gaiting (i.e. no Mahalanobis test) but accept the pairing every time
92 Ball Tracking: Brownian Small process noise Large process noise Ground truth Observations State estimate
93 Ball Tracking: Brownian Ground truth Observations State estimate
94 Ball Tracking: Brownian Ground truth Observations State estimate
95 Ball Tracking: Brownian Ground truth Observations State estimate
96 Ball Tracking: Brownian Ground truth Observations State estimate
97 Ball Tracking: Brownian Ground truth Observations State estimate
98 Ball Tracking: Brownian Ground truth Observations State estimate
99 Ball Tracking: Brownian Ground truth Observations State estimate
100 Ball Tracking: Brownian Ground truth Observations State estimate
101 Ball Tracking: Brownian Ground truth Observations State estimate
102 Ball Tracking: Brownian Ground truth Observations State estimate
103 Ball Tracking: Brownian Ground truth Observations State estimate
104 Ball Tracking: Brownian Ground truth Observations State estimate
105 Ball Tracking: Brownian Ground truth Observations State estimate
106 Ball Tracking: Brownian large difference! Ground truth Observations State estimate
107 Ball Tracking: Constant Velocity Small process noise Large process noise Ground truth Observations State estimate
108 Ball Tracking: Constant Velocity Ground truth Observations State estimate
109 Ball Tracking: Constant Velocity Ground truth Observations State estimate
110 Ball Tracking: Constant Velocity Ground truth Observations State estimate
111 Ball Tracking: Constant Velocity Ground truth Observations State estimate
112 Ball Tracking: Constant Velocity Ground truth Observations State estimate
113 Ball Tracking: Constant Velocity Ground truth Observations State estimate
114 Ball Tracking: Constant Velocity Ground truth Observations State estimate
115 Ball Tracking: Constant Velocity Ground truth Observations State estimate
116 Ball Tracking: Constant Velocity Ground truth Observations State estimate
117 Ball Tracking: Constant Velocity Ground truth Observations State estimate
118 Ball Tracking: Constant Velocity Ground truth Observations State estimate
119 Ball Tracking: Constant Velocity Ground truth Observations State estimate
120 Ball Tracking: Constant Velocity Ground truth Observations State estimate
121 Ball Tracking: Constant Velocity smaller difference Ground truth Observations State estimate
122 Ball Tracking: Const. Acceleration Small process noise Large process noise Ground truth Observations State estimate
123 Ball Tracking: Const. Acceleration Ground truth Observations State estimate
124 Ball Tracking: Const. Acceleration Ground truth Observations State estimate
125 Ball Tracking: Const. Acceleration Ground truth Observations State estimate
126 Ball Tracking: Const. Acceleration Ground truth Observations State estimate
127 Ball Tracking: Const. Acceleration Ground truth Observations State estimate
128 Ball Tracking: Const. Acceleration Ground truth Observations State estimate
129 Ball Tracking: Const. Acceleration Ground truth Observations State estimate
130 Ball Tracking: Const. Acceleration Ground truth Observations State estimate
131 Ball Tracking: Const. Acceleration Ground truth Observations State estimate
132 Ball Tracking: Const. Acceleration Ground truth Observations State estimate
133 Ball Tracking: Const. Acceleration Ground truth Observations State estimate
134 Ball Tracking: Const. Acceleration Ground truth Observations State estimate
135 Ball Tracking: Const. Acceleration Ground truth Observations State estimate
136 Ball Tracking: Const. Acceleration very small difference! Ground truth Observations State estimate
137 Summary Tracking is maintaining the state and identity of a moving object over time despite detection errors (false negatives, false alarms), occlusions, and the presence of other objects Linear Dynamic Systems (a.k.a. the state-space representation) provide the mathematical framework for estimation For tracking, there is no control input u in the process model. Therefore good motion models are key The Kalman filter is a recurse Bayes filter that follows the typical predict-update cycle
138 Summary The Extended Kalman filter (EKF) is for cases of non-linear process or measurement models. It computes the Jacobians, first-order linearizations of the models, and has the same expressions than the KF A large process noise covariance can partly compensate a poor motion model for maneuvering targets But: large process noise covariances cause the validation gates to be large which in turn increases the level of ambiguity for data association. This is potentially problematic in case of multiple targets
Robotics 2 Target Tracking. Giorgio Grisetti, Cyrill Stachniss, Kai Arras, Wolfram Burgard
 Robotics 2 Target Tracking Giorgio Grisetti, Cyrill Stachniss, Kai Arras, Wolfram Burgard Linear Dynamical System (LDS) Stochastic process governed by is the state vector is the input vector is the process
Robotics 2 Target Tracking Giorgio Grisetti, Cyrill Stachniss, Kai Arras, Wolfram Burgard Linear Dynamical System (LDS) Stochastic process governed by is the state vector is the input vector is the process
Robotics 2 Data Association. Giorgio Grisetti, Cyrill Stachniss, Kai Arras, Wolfram Burgard
 Robotics 2 Data Association Giorgio Grisetti, Cyrill Stachniss, Kai Arras, Wolfram Burgard Data Association Data association is the process of associating uncertain measurements to known tracks. Problem
Robotics 2 Data Association Giorgio Grisetti, Cyrill Stachniss, Kai Arras, Wolfram Burgard Data Association Data association is the process of associating uncertain measurements to known tracks. Problem
L11. EKF SLAM: PART I. NA568 Mobile Robotics: Methods & Algorithms
 L11. EKF SLAM: PART I NA568 Mobile Robotics: Methods & Algorithms Today s Topic EKF Feature-Based SLAM State Representation Process / Observation Models Landmark Initialization Robot-Landmark Correlation
L11. EKF SLAM: PART I NA568 Mobile Robotics: Methods & Algorithms Today s Topic EKF Feature-Based SLAM State Representation Process / Observation Models Landmark Initialization Robot-Landmark Correlation
Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization
 Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras 1 Motivation Recall: Discrete filter Discretize the
Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras 1 Motivation Recall: Discrete filter Discretize the
Bayes Filter Reminder. Kalman Filter Localization. Properties of Gaussians. Gaussians. Prediction. Correction. σ 2. Univariate. 1 2πσ e.
 Kalman Filter Localization Bayes Filter Reminder Prediction Correction Gaussians p(x) ~ N(µ,σ 2 ) : Properties of Gaussians Univariate p(x) = 1 1 2πσ e 2 (x µ) 2 σ 2 µ Univariate -σ σ Multivariate µ Multivariate
Kalman Filter Localization Bayes Filter Reminder Prediction Correction Gaussians p(x) ~ N(µ,σ 2 ) : Properties of Gaussians Univariate p(x) = 1 1 2πσ e 2 (x µ) 2 σ 2 µ Univariate -σ σ Multivariate µ Multivariate
L06. LINEAR KALMAN FILTERS. NA568 Mobile Robotics: Methods & Algorithms
 L06. LINEAR KALMAN FILTERS NA568 Mobile Robotics: Methods & Algorithms 2 PS2 is out! Landmark-based Localization: EKF, UKF, PF Today s Lecture Minimum Mean Square Error (MMSE) Linear Kalman Filter Gaussian
L06. LINEAR KALMAN FILTERS NA568 Mobile Robotics: Methods & Algorithms 2 PS2 is out! Landmark-based Localization: EKF, UKF, PF Today s Lecture Minimum Mean Square Error (MMSE) Linear Kalman Filter Gaussian
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: Extended Kalman Filter Dr. Kostas Alexis (CSE) These slides relied on the lectures from C. Stachniss, J. Sturm and the book Probabilistic Robotics from Thurn et al.
Autonomous Mobile Robot Design Topic: Extended Kalman Filter Dr. Kostas Alexis (CSE) These slides relied on the lectures from C. Stachniss, J. Sturm and the book Probabilistic Robotics from Thurn et al.
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Probabilistic Fundamentals in Robotics Gaussian Filters Course Outline Basic mathematical framework Probabilistic models of mobile robots Mobile
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Probabilistic Fundamentals in Robotics Gaussian Filters Course Outline Basic mathematical framework Probabilistic models of mobile robots Mobile
Probabilistic Fundamentals in Robotics. DAUIN Politecnico di Torino July 2010
 Probabilistic Fundamentals in Robotics Gaussian Filters Basilio Bona DAUIN Politecnico di Torino July 2010 Course Outline Basic mathematical framework Probabilistic models of mobile robots Mobile robot
Probabilistic Fundamentals in Robotics Gaussian Filters Basilio Bona DAUIN Politecnico di Torino July 2010 Course Outline Basic mathematical framework Probabilistic models of mobile robots Mobile robot
Tracking and Identification of Multiple targets
 Tracking and Identification of Multiple targets Samir Hachour, François Delmotte, Eric Lefèvre, David Mercier Laboratoire de Génie Informatique et d'automatique de l'artois, EA 3926 LGI2A first name.last
Tracking and Identification of Multiple targets Samir Hachour, François Delmotte, Eric Lefèvre, David Mercier Laboratoire de Génie Informatique et d'automatique de l'artois, EA 3926 LGI2A first name.last
EKF, UKF. Pieter Abbeel UC Berkeley EECS. Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics
 EKF, UKF Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Kalman Filter Kalman Filter = special case of a Bayes filter with dynamics model and sensory
EKF, UKF Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Kalman Filter Kalman Filter = special case of a Bayes filter with dynamics model and sensory
EKF, UKF. Pieter Abbeel UC Berkeley EECS. Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics
 EKF, UKF Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Kalman Filter Kalman Filter = special case of a Bayes filter with dynamics model and sensory
EKF, UKF Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Kalman Filter Kalman Filter = special case of a Bayes filter with dynamics model and sensory
SLAM Techniques and Algorithms. Jack Collier. Canada. Recherche et développement pour la défense Canada. Defence Research and Development Canada
 SLAM Techniques and Algorithms Jack Collier Defence Research and Development Canada Recherche et développement pour la défense Canada Canada Goals What will we learn Gain an appreciation for what SLAM
SLAM Techniques and Algorithms Jack Collier Defence Research and Development Canada Recherche et développement pour la défense Canada Canada Goals What will we learn Gain an appreciation for what SLAM
Instituto de Sistemas e Robótica * Pólo de Coimbra * Tracking and Data Association Using Data from a LRF
 Instituto de Sistemas e Robótica * Pólo de Coimbra * Tracing and Data Association Using Data from a LRF Technical Report Nº ISRLM2005/04 Cristiano Premebida October, 2005. Departamento de Engenharia Electrotécnica
Instituto de Sistemas e Robótica * Pólo de Coimbra * Tracing and Data Association Using Data from a LRF Technical Report Nº ISRLM2005/04 Cristiano Premebida October, 2005. Departamento de Engenharia Electrotécnica
Introduction to Mobile Robotics Bayes Filter Kalman Filter
 Introduction to Mobile Robotics Bayes Filter Kalman Filter Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Giorgio Grisetti, Kai Arras 1 Bayes Filter Reminder 1. Algorithm Bayes_filter( Bel(x),d ):
Introduction to Mobile Robotics Bayes Filter Kalman Filter Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Giorgio Grisetti, Kai Arras 1 Bayes Filter Reminder 1. Algorithm Bayes_filter( Bel(x),d ):
Advanced Techniques for Mobile Robotics Least Squares. Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz
 Advanced Techniques for Mobile Robotics Least Squares Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz Problem Given a system described by a set of n observation functions {f i (x)} i=1:n
Advanced Techniques for Mobile Robotics Least Squares Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz Problem Given a system described by a set of n observation functions {f i (x)} i=1:n
Data association uncertainty occurs when remote sensing devices, such as radar,
 The Probabilistic Data Association Filter ESTIMATION IN THE PRESENCE OF MEASUREMENT ORIGIN UNCERTAINTY YAAKOV BAR-SHALOM, FRED DAUM, and JIM HUANG Data association uncertainty occurs when remote sensing
The Probabilistic Data Association Filter ESTIMATION IN THE PRESENCE OF MEASUREMENT ORIGIN UNCERTAINTY YAAKOV BAR-SHALOM, FRED DAUM, and JIM HUANG Data association uncertainty occurs when remote sensing
Introduction to Mobile Robotics SLAM: Simultaneous Localization and Mapping
 Introduction to Mobile Robotics SLAM: Simultaneous Localization and Mapping Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz What is SLAM? Estimate the pose of a robot and the map of the environment
Introduction to Mobile Robotics SLAM: Simultaneous Localization and Mapping Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz What is SLAM? Estimate the pose of a robot and the map of the environment
9 Multi-Model State Estimation
 Technion Israel Institute of Technology, Department of Electrical Engineering Estimation and Identification in Dynamical Systems (048825) Lecture Notes, Fall 2009, Prof. N. Shimkin 9 Multi-Model State
Technion Israel Institute of Technology, Department of Electrical Engineering Estimation and Identification in Dynamical Systems (048825) Lecture Notes, Fall 2009, Prof. N. Shimkin 9 Multi-Model State
Kalman filtering and friends: Inference in time series models. Herke van Hoof slides mostly by Michael Rubinstein
 Kalman filtering and friends: Inference in time series models Herke van Hoof slides mostly by Michael Rubinstein Problem overview Goal Estimate most probable state at time k using measurement up to time
Kalman filtering and friends: Inference in time series models Herke van Hoof slides mostly by Michael Rubinstein Problem overview Goal Estimate most probable state at time k using measurement up to time
Robotics 2 Least Squares Estimation. Giorgio Grisetti, Cyrill Stachniss, Kai Arras, Maren Bennewitz, Wolfram Burgard
 Robotics 2 Least Squares Estimation Giorgio Grisetti, Cyrill Stachniss, Kai Arras, Maren Bennewitz, Wolfram Burgard Problem Given a system described by a set of n observation functions {f i (x)} i=1:n
Robotics 2 Least Squares Estimation Giorgio Grisetti, Cyrill Stachniss, Kai Arras, Maren Bennewitz, Wolfram Burgard Problem Given a system described by a set of n observation functions {f i (x)} i=1:n
2D Image Processing (Extended) Kalman and particle filter
 Kalman and particle filter") 2D Image Processing (Extended) Kalman and particle filter Prof. Didier Stricker Dr. Gabriele Bleser Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz
2D Image Processing (Extended) Kalman and particle filter Prof. Didier Stricker Dr. Gabriele Bleser Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz
From Bayes to Extended Kalman Filter
 From Bayes to Extended Kalman Filter Michal Reinštein Czech Technical University in Prague Faculty of Electrical Engineering, Department of Cybernetics Center for Machine Perception http://cmp.felk.cvut.cz/
From Bayes to Extended Kalman Filter Michal Reinštein Czech Technical University in Prague Faculty of Electrical Engineering, Department of Cybernetics Center for Machine Perception http://cmp.felk.cvut.cz/
EKF and SLAM. McGill COMP 765 Sept 18 th, 2017
 EKF and SLAM McGill COMP 765 Sept 18 th, 2017 Outline News and information Instructions for paper presentations Continue on Kalman filter: EKF and extension to mapping Example of a real mapping system:
EKF and SLAM McGill COMP 765 Sept 18 th, 2017 Outline News and information Instructions for paper presentations Continue on Kalman filter: EKF and extension to mapping Example of a real mapping system:
2D Image Processing. Bayes filter implementation: Kalman filter
 2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
1 Kalman Filter Introduction
 1 Kalman Filter Introduction You should first read Chapter 1 of Stochastic models, estimation, and control: Volume 1 by Peter S. Maybec (available here). 1.1 Explanation of Equations (1-3) and (1-4) Equation
1 Kalman Filter Introduction You should first read Chapter 1 of Stochastic models, estimation, and control: Volume 1 by Peter S. Maybec (available here). 1.1 Explanation of Equations (1-3) and (1-4) Equation
Introduction to Mobile Robotics Information Gain-Based Exploration. Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Giorgio Grisetti, Kai Arras
 Introduction to Mobile Robotics Information Gain-Based Exploration Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Giorgio Grisetti, Kai Arras 1 Tasks of Mobile Robots mapping SLAM localization integrated
Introduction to Mobile Robotics Information Gain-Based Exploration Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Giorgio Grisetti, Kai Arras 1 Tasks of Mobile Robots mapping SLAM localization integrated
Lecture Outline. Target Tracking: Lecture 3 Maneuvering Target Tracking Issues. Maneuver Illustration. Maneuver Illustration. Maneuver Detection
 REGLERTEKNIK Lecture Outline AUTOMATIC CONTROL Target Tracking: Lecture 3 Maneuvering Target Tracking Issues Maneuver Detection Emre Özkan emre@isy.liu.se Division of Automatic Control Department of Electrical
REGLERTEKNIK Lecture Outline AUTOMATIC CONTROL Target Tracking: Lecture 3 Maneuvering Target Tracking Issues Maneuver Detection Emre Özkan emre@isy.liu.se Division of Automatic Control Department of Electrical
Partially Observable Markov Decision Processes (POMDPs)
") Partially Observable Markov Decision Processes (POMDPs) Sachin Patil Guest Lecture: CS287 Advanced Robotics Slides adapted from Pieter Abbeel, Alex Lee Outline Introduction to POMDPs Locally Optimal Solutions
Partially Observable Markov Decision Processes (POMDPs) Sachin Patil Guest Lecture: CS287 Advanced Robotics Slides adapted from Pieter Abbeel, Alex Lee Outline Introduction to POMDPs Locally Optimal Solutions
Particle Filters; Simultaneous Localization and Mapping (Intelligent Autonomous Robotics) Subramanian Ramamoorthy School of Informatics
 Subramanian Ramamoorthy School of Informatics") Particle Filters; Simultaneous Localization and Mapping (Intelligent Autonomous Robotics) Subramanian Ramamoorthy School of Informatics Recap: State Estimation using Kalman Filter Project state and error
Particle Filters; Simultaneous Localization and Mapping (Intelligent Autonomous Robotics) Subramanian Ramamoorthy School of Informatics Recap: State Estimation using Kalman Filter Project state and error
L03. PROBABILITY REVIEW II COVARIANCE PROJECTION. NA568 Mobile Robotics: Methods & Algorithms
 L03. PROBABILITY REVIEW II COVARIANCE PROJECTION NA568 Mobile Robotics: Methods & Algorithms Today s Agenda State Representation and Uncertainty Multivariate Gaussian Covariance Projection Probabilistic
L03. PROBABILITY REVIEW II COVARIANCE PROJECTION NA568 Mobile Robotics: Methods & Algorithms Today s Agenda State Representation and Uncertainty Multivariate Gaussian Covariance Projection Probabilistic
ADDRESSING TRACK COALESCENCE IN SEQUENTIAL K-BEST MULTIPLE HYPOTHESIS TRACKING
 ADDRESSING TRACK COALESCENCE IN SEQUENTIAL K-BEST MULTIPLE HYPOTHESIS TRACKING A Thesis Presented to The Academic Faculty By Ryan D. Palkki In Partial Fulfillment of the Requirements for the Degree Master
ADDRESSING TRACK COALESCENCE IN SEQUENTIAL K-BEST MULTIPLE HYPOTHESIS TRACKING A Thesis Presented to The Academic Faculty By Ryan D. Palkki In Partial Fulfillment of the Requirements for the Degree Master
2D Image Processing. Bayes filter implementation: Kalman filter
 2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Dr. Gabriele Bleser Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche
2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Dr. Gabriele Bleser Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche
Robotics. Mobile Robotics. Marc Toussaint U Stuttgart
 Robotics Mobile Robotics State estimation, Bayes filter, odometry, particle filter, Kalman filter, SLAM, joint Bayes filter, EKF SLAM, particle SLAM, graph-based SLAM Marc Toussaint U Stuttgart DARPA Grand
Robotics Mobile Robotics State estimation, Bayes filter, odometry, particle filter, Kalman filter, SLAM, joint Bayes filter, EKF SLAM, particle SLAM, graph-based SLAM Marc Toussaint U Stuttgart DARPA Grand
Mobile Robot Localization
 Mobile Robot Localization 1 The Problem of Robot Localization Given a map of the environment, how can a robot determine its pose (planar coordinates + orientation)? Two sources of uncertainty: - observations
Mobile Robot Localization 1 The Problem of Robot Localization Given a map of the environment, how can a robot determine its pose (planar coordinates + orientation)? Two sources of uncertainty: - observations
Rao-Blackwellized Particle Filter for Multiple Target Tracking
 Rao-Blackwellized Particle Filter for Multiple Target Tracking Simo Särkkä, Aki Vehtari, Jouko Lampinen Helsinki University of Technology, Finland Abstract In this article we propose a new Rao-Blackwellized
Rao-Blackwellized Particle Filter for Multiple Target Tracking Simo Särkkä, Aki Vehtari, Jouko Lampinen Helsinki University of Technology, Finland Abstract In this article we propose a new Rao-Blackwellized
A Probabilistic Relational Model for Characterizing Situations in Dynamic Multi-Agent Systems
 A Probabilistic Relational Model for Characterizing Situations in Dynamic Multi-Agent Systems Daniel Meyer-Delius 1, Christian Plagemann 1, Georg von Wichert 2, Wendelin Feiten 2, Gisbert Lawitzky 2, and
A Probabilistic Relational Model for Characterizing Situations in Dynamic Multi-Agent Systems Daniel Meyer-Delius 1, Christian Plagemann 1, Georg von Wichert 2, Wendelin Feiten 2, Gisbert Lawitzky 2, and
Introduction p. 1 Fundamental Problems p. 2 Core of Fundamental Theory and General Mathematical Ideas p. 3 Classical Statistical Decision p.
 Preface p. xiii Acknowledgment p. xix Introduction p. 1 Fundamental Problems p. 2 Core of Fundamental Theory and General Mathematical Ideas p. 3 Classical Statistical Decision p. 4 Bayes Decision p. 5
Preface p. xiii Acknowledgment p. xix Introduction p. 1 Fundamental Problems p. 2 Core of Fundamental Theory and General Mathematical Ideas p. 3 Classical Statistical Decision p. 4 Bayes Decision p. 5
PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 13: SEQUENTIAL DATA
 PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 13: SEQUENTIAL DATA Contents in latter part Linear Dynamical Systems What is different from HMM? Kalman filter Its strength and limitation Particle Filter
PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 13: SEQUENTIAL DATA Contents in latter part Linear Dynamical Systems What is different from HMM? Kalman filter Its strength and limitation Particle Filter
State estimation of linear dynamic system with unknown input and uncertain observation using dynamic programming
 Control and Cybernetics vol. 35 (2006) No. 4 State estimation of linear dynamic system with unknown input and uncertain observation using dynamic programming by Dariusz Janczak and Yuri Grishin Department
Control and Cybernetics vol. 35 (2006) No. 4 State estimation of linear dynamic system with unknown input and uncertain observation using dynamic programming by Dariusz Janczak and Yuri Grishin Department
Abnormal Activity Detection and Tracking Namrata Vaswani Dept. of Electrical and Computer Engineering Iowa State University
 Abnormal Activity Detection and Tracking Namrata Vaswani Dept. of Electrical and Computer Engineering Iowa State University Abnormal Activity Detection and Tracking 1 The Problem Goal: To track activities
Abnormal Activity Detection and Tracking Namrata Vaswani Dept. of Electrical and Computer Engineering Iowa State University Abnormal Activity Detection and Tracking 1 The Problem Goal: To track activities
Human Pose Tracking I: Basics. David Fleet University of Toronto
 Human Pose Tracking I: Basics David Fleet University of Toronto CIFAR Summer School, 2009 Looking at People Challenges: Complex pose / motion People have many degrees of freedom, comprising an articulated
Human Pose Tracking I: Basics David Fleet University of Toronto CIFAR Summer School, 2009 Looking at People Challenges: Complex pose / motion People have many degrees of freedom, comprising an articulated
Introduction to Unscented Kalman Filter
 Introduction to Unscented Kalman Filter 1 Introdution In many scientific fields, we use certain models to describe the dynamics of system, such as mobile robot, vision tracking and so on. The word dynamics
Introduction to Unscented Kalman Filter 1 Introdution In many scientific fields, we use certain models to describe the dynamics of system, such as mobile robot, vision tracking and so on. The word dynamics
Probabilistic Fundamentals in Robotics
 Probabilistic Fundamentals in Robotics Probabilistic Models of Mobile Robots Robot localization Basilio Bona DAUIN Politecnico di Torino June 2011 Course Outline Basic mathematical framework Probabilistic
Probabilistic Fundamentals in Robotics Probabilistic Models of Mobile Robots Robot localization Basilio Bona DAUIN Politecnico di Torino June 2011 Course Outline Basic mathematical framework Probabilistic
Mobile Robot Localization
 Mobile Robot Localization 1 The Problem of Robot Localization Given a map of the environment, how can a robot determine its pose (planar coordinates + orientation)? Two sources of uncertainty: - observations
Mobile Robot Localization 1 The Problem of Robot Localization Given a map of the environment, how can a robot determine its pose (planar coordinates + orientation)? Two sources of uncertainty: - observations
TARGET TRACKING AND DATA FUSION: How to Get the Most Out of Your Sensors and make a living out of it FUSION 2017
 TARGET TRACKING AND DATA FUSION: How to Get the Most Out of Your Sensors and make a living out of it AN OVERVIEW OF TRACKING ALGORITHMS FOR CLUTTERED AND MULTITARGET-MULTISENSOR ENVIRONMENTS Yaakov Bar-Shalom,
TARGET TRACKING AND DATA FUSION: How to Get the Most Out of Your Sensors and make a living out of it AN OVERVIEW OF TRACKING ALGORITHMS FOR CLUTTERED AND MULTITARGET-MULTISENSOR ENVIRONMENTS Yaakov Bar-Shalom,
Kalman Filter. Predict: Update: x k k 1 = F k x k 1 k 1 + B k u k P k k 1 = F k P k 1 k 1 F T k + Q
 Kalman Filter Kalman Filter Predict: x k k 1 = F k x k 1 k 1 + B k u k P k k 1 = F k P k 1 k 1 F T k + Q Update: K = P k k 1 Hk T (H k P k k 1 Hk T + R) 1 x k k = x k k 1 + K(z k H k x k k 1 ) P k k =(I
Kalman Filter Kalman Filter Predict: x k k 1 = F k x k 1 k 1 + B k u k P k k 1 = F k P k 1 k 1 F T k + Q Update: K = P k k 1 Hk T (H k P k k 1 Hk T + R) 1 x k k = x k k 1 + K(z k H k x k k 1 ) P k k =(I
CS 532: 3D Computer Vision 6 th Set of Notes
 1 CS 532: 3D Computer Vision 6 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Lecture Outline Intro to Covariance
1 CS 532: 3D Computer Vision 6 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Lecture Outline Intro to Covariance
Probabilistic Fundamentals in Robotics. DAUIN Politecnico di Torino July 2010
 Probabilistic Fundamentals in Robotics Probabilistic Models of Mobile Robots Robot localization Basilio Bona DAUIN Politecnico di Torino July 2010 Course Outline Basic mathematical framework Probabilistic
Probabilistic Fundamentals in Robotics Probabilistic Models of Mobile Robots Robot localization Basilio Bona DAUIN Politecnico di Torino July 2010 Course Outline Basic mathematical framework Probabilistic
Nonlinear Estimation Techniques for Impact Point Prediction of Ballistic Targets
 Nonlinear Estimation Techniques for Impact Point Prediction of Ballistic Targets J. Clayton Kerce a, George C. Brown a, and David F. Hardiman b a Georgia Tech Research Institute, Georgia Institute of Technology,
Nonlinear Estimation Techniques for Impact Point Prediction of Ballistic Targets J. Clayton Kerce a, George C. Brown a, and David F. Hardiman b a Georgia Tech Research Institute, Georgia Institute of Technology,
Using the Kalman Filter for SLAM AIMS 2015
 Using the Kalman Filter for SLAM AIMS 2015 Contents Trivial Kinematics Rapid sweep over localisation and mapping (components of SLAM) Basic EKF Feature Based SLAM Feature types and representations Implementation
Using the Kalman Filter for SLAM AIMS 2015 Contents Trivial Kinematics Rapid sweep over localisation and mapping (components of SLAM) Basic EKF Feature Based SLAM Feature types and representations Implementation
Tactical Ballistic Missile Tracking using the Interacting Multiple Model Algorithm
 Tactical Ballistic Missile Tracking using the Interacting Multiple Model Algorithm Robert L Cooperman Raytheon Co C 3 S Division St Petersburg, FL Robert_L_Cooperman@raytheoncom Abstract The problem of
Tactical Ballistic Missile Tracking using the Interacting Multiple Model Algorithm Robert L Cooperman Raytheon Co C 3 S Division St Petersburg, FL Robert_L_Cooperman@raytheoncom Abstract The problem of
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: Particle Filter for Localization Dr. Kostas Alexis (CSE) These slides relied on the lectures from C. Stachniss, and the book Probabilistic Robotics from Thurn et al.
Autonomous Mobile Robot Design Topic: Particle Filter for Localization Dr. Kostas Alexis (CSE) These slides relied on the lectures from C. Stachniss, and the book Probabilistic Robotics from Thurn et al.
Sensor Tasking and Control
 Sensor Tasking and Control Sensing Networking Leonidas Guibas Stanford University Computation CS428 Sensor systems are about sensing, after all... System State Continuous and Discrete Variables The quantities
Sensor Tasking and Control Sensing Networking Leonidas Guibas Stanford University Computation CS428 Sensor systems are about sensing, after all... System State Continuous and Discrete Variables The quantities
A Multiple Target Range and Range-Rate. Tracker Using an Extended Kalman Filter and. a Multilayered Association Scheme
 A Multiple Target Range and Range-Rate Tracker Using an Extended Kalman Filter and a Multilayered Association Scheme A thesis submitted by Leah Uftring In partial fufillment of the degree requirements
A Multiple Target Range and Range-Rate Tracker Using an Extended Kalman Filter and a Multilayered Association Scheme A thesis submitted by Leah Uftring In partial fufillment of the degree requirements
Markov chain Monte Carlo methods for visual tracking
 Markov chain Monte Carlo methods for visual tracking Ray Luo rluo@cory.eecs.berkeley.edu Department of Electrical Engineering and Computer Sciences University of California, Berkeley Berkeley, CA 94720
Markov chain Monte Carlo methods for visual tracking Ray Luo rluo@cory.eecs.berkeley.edu Department of Electrical Engineering and Computer Sciences University of California, Berkeley Berkeley, CA 94720
ESTIMATOR STABILITY ANALYSIS IN SLAM. Teresa Vidal-Calleja, Juan Andrade-Cetto, Alberto Sanfeliu
 ESTIMATOR STABILITY ANALYSIS IN SLAM Teresa Vidal-Calleja, Juan Andrade-Cetto, Alberto Sanfeliu Institut de Robtica i Informtica Industrial, UPC-CSIC Llorens Artigas 4-6, Barcelona, 88 Spain {tvidal, cetto,
ESTIMATOR STABILITY ANALYSIS IN SLAM Teresa Vidal-Calleja, Juan Andrade-Cetto, Alberto Sanfeliu Institut de Robtica i Informtica Industrial, UPC-CSIC Llorens Artigas 4-6, Barcelona, 88 Spain {tvidal, cetto,
Previously on TT, Target Tracking: Lecture 2 Single Target Tracking Issues. Lecture-2 Outline. Basic ideas on track life
 REGLERTEKNIK Previously on TT, AUTOMATIC CONTROL Target Tracing: Lecture 2 Single Target Tracing Issues Emre Özan emre@isy.liu.se Division of Automatic Control Department of Electrical Engineering Linöping
REGLERTEKNIK Previously on TT, AUTOMATIC CONTROL Target Tracing: Lecture 2 Single Target Tracing Issues Emre Özan emre@isy.liu.se Division of Automatic Control Department of Electrical Engineering Linöping
Bayesian Methods in Positioning Applications
 Bayesian Methods in Positioning Applications Vedran Dizdarević v.dizdarevic@tugraz.at Graz University of Technology, Austria 24. May 2006 Bayesian Methods in Positioning Applications p.1/21 Outline Problem
Bayesian Methods in Positioning Applications Vedran Dizdarević v.dizdarevic@tugraz.at Graz University of Technology, Austria 24. May 2006 Bayesian Methods in Positioning Applications p.1/21 Outline Problem
Data Fusion Kalman Filtering Self Localization
 Data Fusion Kalman Filtering Self Localization Armando Jorge Sousa http://www.fe.up.pt/asousa asousa@fe.up.pt Faculty of Engineering, University of Porto, Portugal Department of Electrical and Computer
Data Fusion Kalman Filtering Self Localization Armando Jorge Sousa http://www.fe.up.pt/asousa asousa@fe.up.pt Faculty of Engineering, University of Porto, Portugal Department of Electrical and Computer
A Two-Stage Approach to Multi-Sensor Temporal Data Fusion
 A Two-Stage Approach to Multi-Sensor Temporal Data Fusion D.Hutber and Z.Zhang INRIA, 2004 Route des Lucioles, B.P.93, 06902 Sophia Antipolis Cedex, France. dhutber@sophia.inria.fr, zzhangosophia.inria.fr
A Two-Stage Approach to Multi-Sensor Temporal Data Fusion D.Hutber and Z.Zhang INRIA, 2004 Route des Lucioles, B.P.93, 06902 Sophia Antipolis Cedex, France. dhutber@sophia.inria.fr, zzhangosophia.inria.fr
Introduction to Mobile Robotics Compact Course on Linear Algebra. Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello
 Introduction to Mobile Robotics Compact Course on Linear Algebra Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello Vectors Arrays of numbers Vectors represent a point
Introduction to Mobile Robotics Compact Course on Linear Algebra Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello Vectors Arrays of numbers Vectors represent a point
A Sufficient Comparison of Trackers
 A Sufficient Comparison of Trackers David Bizup University of Virginia Department of Systems and Information Engineering P.O. Box 400747 151 Engineer's Way Charlottesville, VA 22904 Donald E. Brown University
A Sufficient Comparison of Trackers David Bizup University of Virginia Department of Systems and Information Engineering P.O. Box 400747 151 Engineer's Way Charlottesville, VA 22904 Donald E. Brown University
CSC487/2503: Foundations of Computer Vision. Visual Tracking. David Fleet
 CSC487/2503: Foundations of Computer Vision Visual Tracking David Fleet Introduction What is tracking? Major players: Dynamics (model of temporal variation of target parameters) Measurements (relation
CSC487/2503: Foundations of Computer Vision Visual Tracking David Fleet Introduction What is tracking? Major players: Dynamics (model of temporal variation of target parameters) Measurements (relation
Simultaneous Localization and Mapping (SLAM) Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo") Simultaneous Localization and Mapping (SLAM) Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Introduction SLAM asks the following question: Is it possible for an autonomous vehicle
Simultaneous Localization and Mapping (SLAM) Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Introduction SLAM asks the following question: Is it possible for an autonomous vehicle
Human-Oriented Robotics. Probability Refresher. Kai Arras Social Robotics Lab, University of Freiburg Winter term 2014/2015
 Probability Refresher Kai Arras, University of Freiburg Winter term 2014/2015 Probability Refresher Introduction to Probability Random variables Joint distribution Marginalization Conditional probability
Probability Refresher Kai Arras, University of Freiburg Winter term 2014/2015 Probability Refresher Introduction to Probability Random variables Joint distribution Marginalization Conditional probability
Vlad Estivill-Castro. Robots for People --- A project for intelligent integrated systems
 1 Vlad Estivill-Castro Robots for People --- A project for intelligent integrated systems V. Estivill-Castro 2 Probabilistic Map-based Localization (Kalman Filter) Chapter 5 (textbook) Based on textbook
1 Vlad Estivill-Castro Robots for People --- A project for intelligent integrated systems V. Estivill-Castro 2 Probabilistic Map-based Localization (Kalman Filter) Chapter 5 (textbook) Based on textbook
Introduction to Mobile Robotics Probabilistic Robotics
 Introduction to Mobile Robotics Probabilistic Robotics Wolfram Burgard 1 Probabilistic Robotics Key idea: Explicit representation of uncertainty (using the calculus of probability theory) Perception Action
Introduction to Mobile Robotics Probabilistic Robotics Wolfram Burgard 1 Probabilistic Robotics Key idea: Explicit representation of uncertainty (using the calculus of probability theory) Perception Action
Particle Filters. Pieter Abbeel UC Berkeley EECS. Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics
 Particle Filters Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Motivation For continuous spaces: often no analytical formulas for Bayes filter updates
Particle Filters Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Motivation For continuous spaces: often no analytical formulas for Bayes filter updates
Robot Localisation. Henrik I. Christensen. January 12, 2007
 Robot Henrik I. Robotics and Intelligent Machines @ GT College of Computing Georgia Institute of Technology Atlanta, GA hic@cc.gatech.edu January 12, 2007 The Robot Structure Outline 1 2 3 4 Sum of 5 6
Robot Henrik I. Robotics and Intelligent Machines @ GT College of Computing Georgia Institute of Technology Atlanta, GA hic@cc.gatech.edu January 12, 2007 The Robot Structure Outline 1 2 3 4 Sum of 5 6
Tracking Groups of People with a Multi-Model Hypothesis Tracker
 Tracking Groups of People with a Multi-Model Hypothesis Tracker Boris Lau Kai O. Arras Wolfram Burgard Abstract People in densely populated environments typically form groups that split and merge. In this
Tracking Groups of People with a Multi-Model Hypothesis Tracker Boris Lau Kai O. Arras Wolfram Burgard Abstract People in densely populated environments typically form groups that split and merge. In this
Artificial Intelligence
 Artificial Intelligence Roman Barták Department of Theoretical Computer Science and Mathematical Logic Summary of last lecture We know how to do probabilistic reasoning over time transition model P(X t
Artificial Intelligence Roman Barták Department of Theoretical Computer Science and Mathematical Logic Summary of last lecture We know how to do probabilistic reasoning over time transition model P(X t
UAV Navigation: Airborne Inertial SLAM
 Introduction UAV Navigation: Airborne Inertial SLAM Jonghyuk Kim Faculty of Engineering and Information Technology Australian National University, Australia Salah Sukkarieh ARC Centre of Excellence in
Introduction UAV Navigation: Airborne Inertial SLAM Jonghyuk Kim Faculty of Engineering and Information Technology Australian National University, Australia Salah Sukkarieh ARC Centre of Excellence in
CS491/691: Introduction to Aerial Robotics
 CS491/691: Introduction to Aerial Robotics Topic: State Estimation Dr. Kostas Alexis (CSE) World state (or system state) Belief state: Our belief/estimate of the world state World state: Real state of
CS491/691: Introduction to Aerial Robotics Topic: State Estimation Dr. Kostas Alexis (CSE) World state (or system state) Belief state: Our belief/estimate of the world state World state: Real state of
MMSE-Based Filtering for Linear and Nonlinear Systems in the Presence of Non-Gaussian System and Measurement Noise
 MMSE-Based Filtering for Linear and Nonlinear Systems in the Presence of Non-Gaussian System and Measurement Noise I. Bilik 1 and J. Tabrikian 2 1 Dept. of Electrical and Computer Engineering, University
MMSE-Based Filtering for Linear and Nonlinear Systems in the Presence of Non-Gaussian System and Measurement Noise I. Bilik 1 and J. Tabrikian 2 1 Dept. of Electrical and Computer Engineering, University
A NEW FORMULATION OF IPDAF FOR TRACKING IN CLUTTER
 A NEW FRMULATIN F IPDAF FR TRACKING IN CLUTTER Jean Dezert NERA, 29 Av. Division Leclerc 92320 Châtillon, France fax:+33146734167 dezert@onera.fr Ning Li, X. Rong Li University of New rleans New rleans,
A NEW FRMULATIN F IPDAF FR TRACKING IN CLUTTER Jean Dezert NERA, 29 Av. Division Leclerc 92320 Châtillon, France fax:+33146734167 dezert@onera.fr Ning Li, X. Rong Li University of New rleans New rleans,
GEO Optical Data Association with Concurrent Metric and Photometric Information Phan Dao 1 and Dave Monet 2
 GEO Optical Data Association with Concurrent Metric and Photometric Information Phan Dao 1 and Dave Monet 1 Air Force Research Laboratory, Kirtland AFB US Naval Observatory, Flagstaff Station Abstract
GEO Optical Data Association with Concurrent Metric and Photometric Information Phan Dao 1 and Dave Monet 1 Air Force Research Laboratory, Kirtland AFB US Naval Observatory, Flagstaff Station Abstract
TSRT14: Sensor Fusion Lecture 8
 TSRT14: Sensor Fusion Lecture 8 Particle filter theory Marginalized particle filter Gustaf Hendeby gustaf.hendeby@liu.se TSRT14 Lecture 8 Gustaf Hendeby Spring 2018 1 / 25 Le 8: particle filter theory,
TSRT14: Sensor Fusion Lecture 8 Particle filter theory Marginalized particle filter Gustaf Hendeby gustaf.hendeby@liu.se TSRT14 Lecture 8 Gustaf Hendeby Spring 2018 1 / 25 Le 8: particle filter theory,
Robot Mapping. Least Squares. Cyrill Stachniss
 Robot Mapping Least Squares Cyrill Stachniss 1 Three Main SLAM Paradigms Kalman filter Particle filter Graphbased least squares approach to SLAM 2 Least Squares in General Approach for computing a solution
Robot Mapping Least Squares Cyrill Stachniss 1 Three Main SLAM Paradigms Kalman filter Particle filter Graphbased least squares approach to SLAM 2 Least Squares in General Approach for computing a solution
Using the Kalman Filter to Estimate the State of a Maneuvering Aircraft
 1 Using the Kalman Filter to Estimate the State of a Maneuvering Aircraft K. Meier and A. Desai Abstract Using sensors that only measure the bearing angle and range of an aircraft, a Kalman filter is implemented
1 Using the Kalman Filter to Estimate the State of a Maneuvering Aircraft K. Meier and A. Desai Abstract Using sensors that only measure the bearing angle and range of an aircraft, a Kalman filter is implemented
Recursive Bayes Filtering
 Recursive Bayes Filtering CS485 Autonomous Robotics Amarda Shehu Fall 2013 Notes modified from Wolfram Burgard, University of Freiburg Physical Agents are Inherently Uncertain Uncertainty arises from four
Recursive Bayes Filtering CS485 Autonomous Robotics Amarda Shehu Fall 2013 Notes modified from Wolfram Burgard, University of Freiburg Physical Agents are Inherently Uncertain Uncertainty arises from four
Suppression of impulse noise in Track-Before-Detect Algorithms
 Computer Applications in Electrical Engineering Suppression of impulse noise in Track-Before-Detect Algorithms Przemysław Mazurek West-Pomeranian University of Technology 71-126 Szczecin, ul. 26. Kwietnia
Computer Applications in Electrical Engineering Suppression of impulse noise in Track-Before-Detect Algorithms Przemysław Mazurek West-Pomeranian University of Technology 71-126 Szczecin, ul. 26. Kwietnia
Modeling and state estimation Examples State estimation Probabilities Bayes filter Particle filter. Modeling. CSC752 Autonomous Robotic Systems
 Modeling CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami February 21, 2017 Outline 1 Modeling and state estimation 2 Examples 3 State estimation 4 Probabilities
Modeling CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami February 21, 2017 Outline 1 Modeling and state estimation 2 Examples 3 State estimation 4 Probabilities
Place-Dependent People Tracking
 Place-Dependent People Tracking Matthias Luber, Gian Diego Tipaldi and Kai O. Arras Abstract People typically move and act under the constraints of an environment, making human behavior strongly place-dependent.
Place-Dependent People Tracking Matthias Luber, Gian Diego Tipaldi and Kai O. Arras Abstract People typically move and act under the constraints of an environment, making human behavior strongly place-dependent.
Time Series Prediction by Kalman Smoother with Cross-Validated Noise Density
 Time Series Prediction by Kalman Smoother with Cross-Validated Noise Density Simo Särkkä E-mail: simo.sarkka@hut.fi Aki Vehtari E-mail: aki.vehtari@hut.fi Jouko Lampinen E-mail: jouko.lampinen@hut.fi Abstract
Time Series Prediction by Kalman Smoother with Cross-Validated Noise Density Simo Särkkä E-mail: simo.sarkka@hut.fi Aki Vehtari E-mail: aki.vehtari@hut.fi Jouko Lampinen E-mail: jouko.lampinen@hut.fi Abstract
Robot Localization and Kalman Filters
 Robot Localization and Kalman Filters Rudy Negenborn rudy@negenborn.net August 26, 2003 Outline Robot Localization Probabilistic Localization Kalman Filters Kalman Localization Kalman Localization with
Robot Localization and Kalman Filters Rudy Negenborn rudy@negenborn.net August 26, 2003 Outline Robot Localization Probabilistic Localization Kalman Filters Kalman Localization Kalman Localization with
Lecture 2: From Linear Regression to Kalman Filter and Beyond
 Lecture 2: From Linear Regression to Kalman Filter and Beyond Department of Biomedical Engineering and Computational Science Aalto University January 26, 2012 Contents 1 Batch and Recursive Estimation
Lecture 2: From Linear Regression to Kalman Filter and Beyond Department of Biomedical Engineering and Computational Science Aalto University January 26, 2012 Contents 1 Batch and Recursive Estimation
Statistical Multisource-Multitarget Information Fusion
 Statistical Multisource-Multitarget Information Fusion Ronald P. S. Mahler ARTECH H O U S E BOSTON LONDON artechhouse.com Contents Preface Acknowledgments xxm xxv Chapter 1 Introduction to the Book 1 1.1
Statistical Multisource-Multitarget Information Fusion Ronald P. S. Mahler ARTECH H O U S E BOSTON LONDON artechhouse.com Contents Preface Acknowledgments xxm xxv Chapter 1 Introduction to the Book 1 1.1
Partially Observable Markov Decision Processes (POMDPs) Pieter Abbeel UC Berkeley EECS
 Pieter Abbeel UC Berkeley EECS") Partially Observable Markov Decision Processes (POMDPs) Pieter Abbeel UC Berkeley EECS Many slides adapted from Jur van den Berg Outline POMDPs Separation Principle / Certainty Equivalence Locally Optimal
Partially Observable Markov Decision Processes (POMDPs) Pieter Abbeel UC Berkeley EECS Many slides adapted from Jur van den Berg Outline POMDPs Separation Principle / Certainty Equivalence Locally Optimal
Lagrangian Data Assimilation and Manifold Detection for a Point-Vortex Model. David Darmon, AMSC Kayo Ide, AOSC, IPST, CSCAMM, ESSIC
 Lagrangian Data Assimilation and Manifold Detection for a Point-Vortex Model David Darmon, AMSC Kayo Ide, AOSC, IPST, CSCAMM, ESSIC Background Data Assimilation Iterative process Forecast Analysis Background
Lagrangian Data Assimilation and Manifold Detection for a Point-Vortex Model David Darmon, AMSC Kayo Ide, AOSC, IPST, CSCAMM, ESSIC Background Data Assimilation Iterative process Forecast Analysis Background
STONY BROOK UNIVERSITY. CEAS Technical Report 829
 1 STONY BROOK UNIVERSITY CEAS Technical Report 829 Variable and Multiple Target Tracking by Particle Filtering and Maximum Likelihood Monte Carlo Method Jaechan Lim January 4, 2006 2 Abstract In most applications
1 STONY BROOK UNIVERSITY CEAS Technical Report 829 Variable and Multiple Target Tracking by Particle Filtering and Maximum Likelihood Monte Carlo Method Jaechan Lim January 4, 2006 2 Abstract In most applications
Miscellaneous. Regarding reading materials. Again, ask questions (if you have) and ask them earlier
 and ask them earlier") Miscellaneous Regarding reading materials Reading materials will be provided as needed If no assigned reading, it means I think the material from class is sufficient Should be enough for you to do your
Miscellaneous Regarding reading materials Reading materials will be provided as needed If no assigned reading, it means I think the material from class is sufficient Should be enough for you to do your
Combined Particle and Smooth Variable Structure Filtering for Nonlinear Estimation Problems
 14th International Conference on Information Fusion Chicago, Illinois, USA, July 5-8, 2011 Combined Particle and Smooth Variable Structure Filtering for Nonlinear Estimation Problems S. Andrew Gadsden
14th International Conference on Information Fusion Chicago, Illinois, USA, July 5-8, 2011 Combined Particle and Smooth Variable Structure Filtering for Nonlinear Estimation Problems S. Andrew Gadsden
The Kalman Filter ImPr Talk
 The Kalman Filter ImPr Talk Ged Ridgway Centre for Medical Image Computing November, 2006 Outline What is the Kalman Filter? State Space Models Kalman Filter Overview Bayesian Updating of Estimates Kalman
The Kalman Filter ImPr Talk Ged Ridgway Centre for Medical Image Computing November, 2006 Outline What is the Kalman Filter? State Space Models Kalman Filter Overview Bayesian Updating of Estimates Kalman
Introduction to Mobile Robotics Compact Course on Linear Algebra. Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz
 Introduction to Mobile Robotics Compact Course on Linear Algebra Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz Vectors Arrays of numbers Vectors represent a point in a n dimensional space
Introduction to Mobile Robotics Compact Course on Linear Algebra Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz Vectors Arrays of numbers Vectors represent a point in a n dimensional space
Tracking of Extended Objects and Group Targets using Random Matrices A New Approach
 Tracing of Extended Objects and Group Targets using Random Matrices A New Approach Michael Feldmann FGAN Research Institute for Communication, Information Processing and Ergonomics FKIE D-53343 Wachtberg,
Tracing of Extended Objects and Group Targets using Random Matrices A New Approach Michael Feldmann FGAN Research Institute for Communication, Information Processing and Ergonomics FKIE D-53343 Wachtberg,
Distributed Data Fusion with Kalman Filters. Simon Julier Computer Science Department University College London
 Distributed Data Fusion with Kalman Filters Simon Julier Computer Science Department University College London S.Julier@cs.ucl.ac.uk Structure of Talk Motivation Kalman Filters Double Counting Optimal
Distributed Data Fusion with Kalman Filters Simon Julier Computer Science Department University College London S.Julier@cs.ucl.ac.uk Structure of Talk Motivation Kalman Filters Double Counting Optimal
Multi-Sensor Multi-Target Tracking - Strategies for Events that Become Invisible
 Multi-Sensor Multi-Target Tracking - Strategies for Events that Become Invisible D.Hutber and Z.Zhang INRIA, 2004 Route des Lucioles, B.P.93, 06902 Sophia Antipolis Cedex, France. dhutber@sophia.inria.fr,
Multi-Sensor Multi-Target Tracking - Strategies for Events that Become Invisible D.Hutber and Z.Zhang INRIA, 2004 Route des Lucioles, B.P.93, 06902 Sophia Antipolis Cedex, France. dhutber@sophia.inria.fr,
ASSOCIATION OF SATELLITE OBSERVATIONS USING BAYESIAN INFERENCE
 AAS 13-245 ASSOCIATION OF SATELLITE OBSERVATIONS USING BAYESIAN INFERENCE Christopher Binz and Liam Healy When observing satellites in an increasingly cluttered space environment, ambiguity in measurement
AAS 13-245 ASSOCIATION OF SATELLITE OBSERVATIONS USING BAYESIAN INFERENCE Christopher Binz and Liam Healy When observing satellites in an increasingly cluttered space environment, ambiguity in measurement
Markov localization uses an explicit, discrete representation for the probability of all position in the state space.
 Markov Kalman Filter Localization Markov localization localization starting from any unknown position recovers from ambiguous situation. However, to update the probability of all positions within the whole
Markov Kalman Filter Localization Markov localization localization starting from any unknown position recovers from ambiguous situation. However, to update the probability of all positions within the whole