CS491/691: Introduction to Aerial Robotics
|
|
|
- Gregory Pearson
- 5 years ago
- Views:
Transcription
1 CS491/691: Introduction to Aerial Robotics Topic: State Estimation Dr. Kostas Alexis (CSE)

2 World state (or system state) Belief state: Our belief/estimate of the world state World state: Real state of the robot in the real world Parts of this talk are inspired from the edx lecture Autonomous Navigation for Flying Robots from TUM

3 State Estimation What parts of the world state are (most) relevant for a flying robot? Position Velocity Orientation Attitude rate Obstacles Map Positions and intentions of other robots/human beings


4 State Estimation Cannot observe world state directly Need to estimate the world state But How? Infer world state from sensor data Infer world state from executed motions/actions

5 Sensor Model Robot perceives the environment through its sensors: Where z is the sensor reading, h is the world state. Goal: Infer the state of the world from sensor readings.

6 Motion Model Robot executes an action (or control) u e.g: move forward at 1m/s Update belief state according to the motion model: Where x is the current state and x is the previous state.

7 Probabilistic Robotics Sensor observations are noisy, partial, potentially missing. All models are partially wrong and incomplete. Usually we have prior knowledge.
8 Probabilistic Robotics Probabilistic sensor models: Probabilistic motion models: Fuse data between multiple sensors (multi-modal): Fuse data over time (filtering):
9 CS491/691: Introduction to Aerial Robotics Topic: State Estimation Recap on Probabilities Dr. Kostas Alexis (CSE)
10 Probability theory Random experiment that can produce a number of outcomes, e.g. a rolling dice. Sample space, e.g.: {1,2,3,4,5,6} Event A is subset of outcomes, e.g. {1,3,5} Probability P(A), e.g. P(A)=0.5
11 Axioms of Probability theory
12 Discrete Random Variables X denotes a random variable X can take on a countable number of values in {x 1,x 2,,x n } P(X=x i ) is the probability that the random variable X takes on value x i P(.) is called the probability mass function Example: P(Room)=<0.6,0.3,0.06,0.03>, Room one of the office, corridor, lab, kitchen
 or P(x) is called the probability density function (PDF).")
13 Continuous Random Variables X takes on continuous values. P(X=x) or P(x) is called the probability density function (PDF). Thrun, Burgard, Fox, Probabilistic Robotics, MIT Press, 2005 Example:


14 Proper Distributions Sum To One Discrete Case Continuous Case
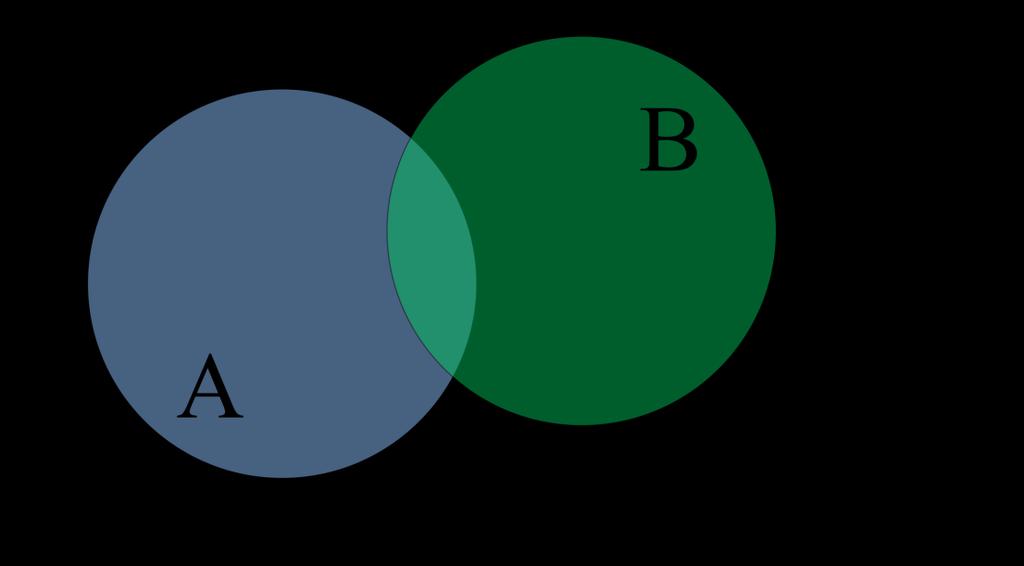
15 Joint and Conditional Probabilities If X and Y are independent then: Is the probability of x given y If X and Y are independent then:

16 Conditional Independence Definition of conditional independence: Equivalent to: Note: this does not necessarily mean that:
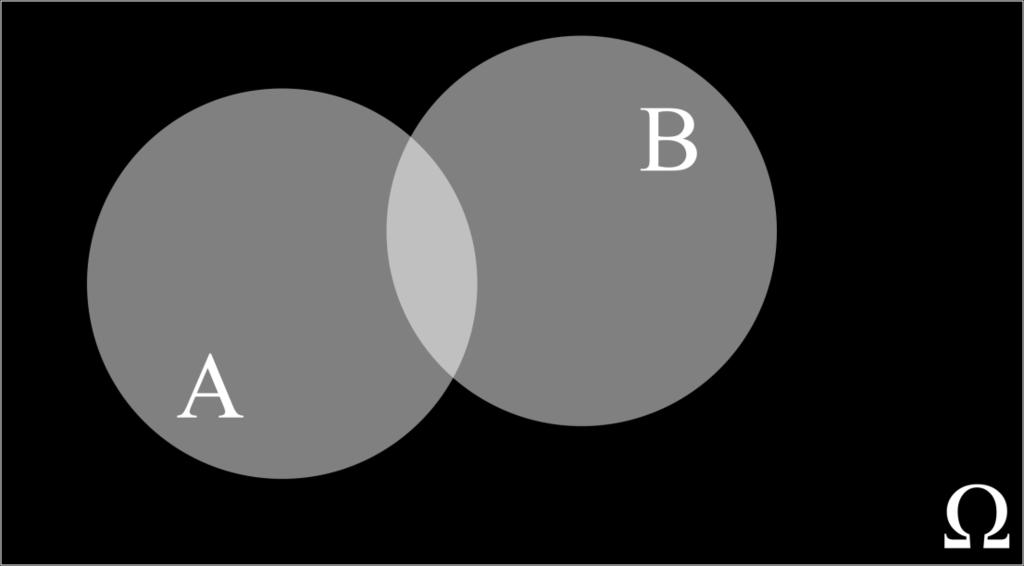
17 Marginalization Discrete case: Continuous case:
18 Marginalization example


19 Expected value of a Random Variable Discrete case: Continuous case: The expected value is the weighted average of all values a random variable can take on. Expectation is a linear operator:
20 Covariance of a Random Variable Measures the square expected deviation from the mean:

21 Estimation from Data Observations: Sample Mean: Sample Covariance:
22 CS491/691: Introduction to Aerial Robotics Topic: State Estimation Reasoning with Bayes Law Dr. Kostas Alexis (CSE)
23 The State Estimation problem We want to estimate the world state x from: Sensor measurements z and Controls u We need to model the relationship between these random variables, i.e:
24 Causal vs. Diagnostic Reasoning Is diagnostic Is causal Diagnostic reasoning is typically what we need. Often causal knowledge is easier to obtain. Bayes rule allows us to use causal knowledge in diagnostic reasoning.

25 Bayes rule Definition of conditional probability: Bayes rule: Observation likelihood Prior on world state Prior on sensor observations
26 Normalization Direct computation of P(z) can be difficult. Idea: compute improper distribution, normalize afterwards. STEP 1: STEP 2: STEP 3:
27 Normalization Direct computation of P(z) can be difficult. Idea: compute improper distribution, normalize afterwards. STEP 1: STEP 2: STEP 3:

28 Example: Sensor Measurement Quadrotor seeks the Landing Zone The landing zone is marked with many bright lamps The quadrotor has a light sensor.
29 Example: Sensor Measurement Binary sensor Binary world state Sensor model Prior on world state Assume: robot observes light, i.e. What is the probability the robot is above the landing zone. that

30 Example: Sensor Measurement Sensor model: Prior on world state: Probability after observation (using Bayes):
31 CS491/691: Introduction to Aerial Robotics Topic: State Estimation Bayes Filter Dr. Kostas Alexis (CSE)
32 Markov Assumption Observations depend only on current state Current state depends only on previous state and current action
33 Markov Chain A Markov Chain is a stochastic process where, given the present state, the past and the future states are independent.
34 Underlying Assumptions Static world Independent noise Perfect model, no approximation errors
35 Bayes Filter Given Sequence of observations and actions: Sensor model: Action model: Prior probability of the system state: Desired Estimate of the state of the dynamic system: Posterior of the state is also called belief:
36 Bayes Filter Algorithm For each time step, do: Apply motion model: Apply sensor model: η is a normalization factor to ensure that the probability is maximum 1.
37 Notes Bayes filters also work on continuous state spaces (replace sum by integral). Bayes filter also works when actions and observations are asynchronous.

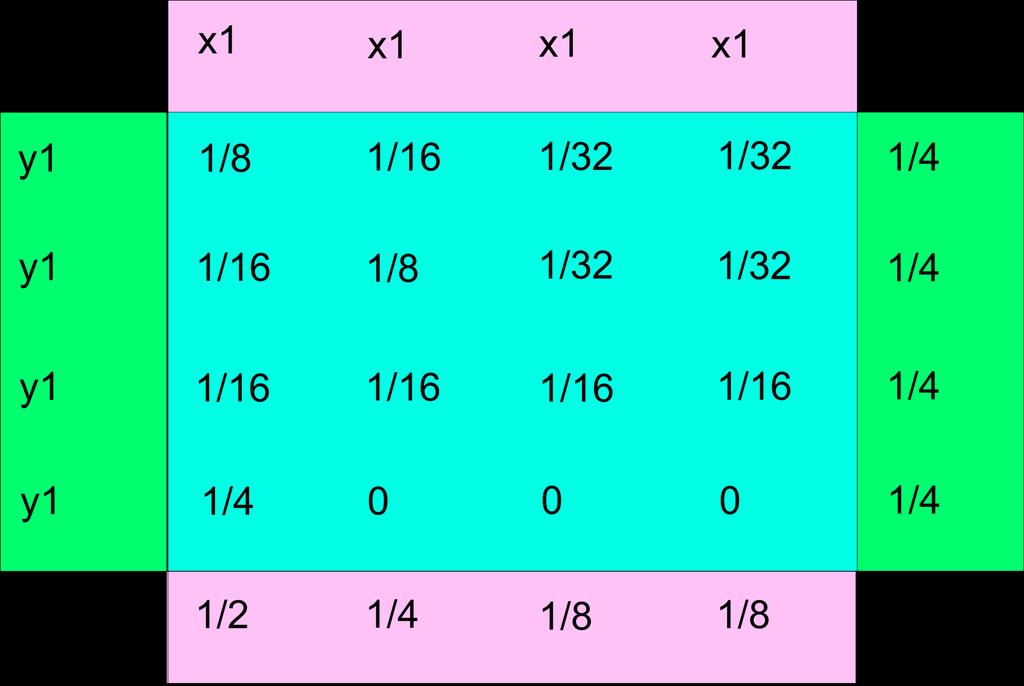
38 Example: Localization Discrete state: Belief distribution can be represented as a grid This is also called a historigram filter

39 Example: Localization Action: Robot can move one cell in each time step Actions are not perfectly executed

40 Example: Localization Action Robot can move one cell in each time step Actions are not perfectly executed Example: move east 60% success rate, 10% to stay/move too far/ move one up/ move one down

41 Example: Localization Binary observation: One (special) location has a marker Marker is sometimes also detected in neighboring cells
42 Example: Localization Let s start a simulation run
43 Example: Localization t=0 Prior distribution (initial belief) Assume that we know the initial location (if not, we could initialize with a uniform prior)

44 Example: Localization t=1, u =east, z=no-marker Bayes filter step 1: Apply motion model
45 Example: Localization t=1, u =east, z=no-marker Bayes filter step 2: Apply observation model

46 Example: Localization t=2, u =east, z=marker Bayes filter step 1: Apply motion model


47 Example: Localization t=2, u =east, z=marker Bayes filter step 2: Apply observation model Question: where is the robot?
48 CS491/691: Introduction to Aerial Robotics Topic: State Estimation Kalman Filter Dr. Kostas Alexis (CSE)
49 Kalman Filter Bayes filter is a useful tool for state estimation. Histogram filter with grid representation is not very efficient. How can we represent the state more efficiently?
50 Kalman Filter Bayes filter with continuous states State represented with a normal distribution Developed in the late 1950 s. A cornerstone. Designed and first application: estimate the trajectory of the Apollo missiles. Kalman Filter is very efficient (only requires a few matrix operations per time step). Applications range from economics, weather forecasting, satellite navigation to robotics and many more.



51 Kalman Filter Univariate distribution mean Variance (squared standard deviation)

52 Kalman Filter Multivariate normal distribution: Mean: Covariance: Probability density function:
53 Properties of Normal Distributions Linear transformation remains Gaussian Intersection of two Gaussians remains Gaussian


54 Properties of Normal Distributions Linear transformation remains Gaussian Intersection of two Gaussians remains Gaussian
55 Linear Process Model Consider a time-discrete stochastic process (Markov chain)
56 Linear Process Model Consider a time-discrete stochastic process Represent the estimated state (belief) with a Gaussian
57 Linear Process Model Consider a time-discrete stochastic process Represent the estimated state (belief) with a Gaussian Assume that the system evolves linearly over time, then
58 Linear Process Model Consider a time-discrete stochastic process Represent the estimated state (belief) with a Gaussian Assume that the system evolves linearly over time, then depends linearly on the controls
59 Linear Process Model Consider a time-discrete stochastic process Represent the estimated state (belief) with a Gaussian Assume that the system evolves linearly over time, then depends linearly on the controls, and has zero-mean, normally distributed process noise With
60 Linear Observations Further, assume we make observations that depend linearly on the state
61 Linear Observations Further, assume we make observations that depend linearly on the state and that are perturbed zero-mean, normally distributed observation noise With
62 Kalman Filter Estimates the state x t of a discrete-time controlled process that is governed by the linear stochastic difference equation And (linear) measurements of the state With and
63 Kalman Filter State Controls Observations Process equation nxn nxl Measurement equation nxk
64 Kalman Filter Initial belief is Gaussian Next state is also Gaussian (linear transformation) Observations are also Gaussian
65 Recall: Bayes Filter Algorithm For each step, do: Apply motion model Apply sensor model

66 From Bayes Filter to Kalman Filter For each step, do: Apply motion model

67 From Bayes Filter to Kalman Filter For each step, do: Apply motion model
68 From Bayes Filter to Kalman Filter For each step, do: Apply sensor model With (Kalman Gain)
69 From Bayes Filter to Kalman Filter Blends between our previous estimate and the discrepancy between our sensor observations and our predictions. The degree to which we believe in our sensor observations is the Kalman Gain. And this depends on a formula based on the errors of sensing etc. In fact it depends on the ratio between our uncertainty Σ and the uncertainty of our sensor observations R. old mean Kalman Gain

70 From Bayes Filter to Kalman Filter For each step, do: Apply sensor model With (Kalman Gain)
71 Kalman Filter Algorithm For each step, do: Apply motion model (prediction step) Apply sensor model (correction step) With
")

72 Kalman Filter Algorithm For each step, do: Apply motion model (prediction step) Prediction & Correction steps can happen in any order. Apply sensor model (correction step) With
73 Kalman Filter Algorithm Prediction & Correction steps can happen in any order. Prediction Correction

74 Complexity Highly efficient: Polynomial in the measurement dimensionality k and state dimensionality n Optimal for linear Gaussian systems But most robots are nonlinear! This is why in practice we use Extended Kalman Filters and other approaches.
75 Python KF Implementation
76 Assignment 1: Estimating a Random Constant The goal of this task is to estimate a scalar random constant, which may be a voltage level. Let's assume that we have the ability to take measurements of the constant, but that the measurements are corrupted by 0.1 Volt RMS white measurement noise (e.g. our analog to digital converter is not very accurate). In this example, the process is governed by the linear difference equation: with a measurement z that is: The state does not change from step to step, this is why A=1. There is no control input, therefore B =0,u=0. Our noisy measurement, directly measures the state - therefore H=1. Notice that the subscript k was dropped in several places because the respective parameters remain constant in our simple model. Programming Language: preferably one Python, MATLAB, C++, or JAVA Form of the Report: 1. Brief report with the code and the relevant plots indicating the correct estimate of the constant, 2. Comments on what you understood about the filter operation. Deadline: March 11, 2016


77 Assignment 1 Bonus: Develop an EKF to estimate the attitude of the UAV based on its IMU data Use the IMU data that you can download following this URL, and develop an Extended Kalman Filter solution to estimate the attitude of the aerial robot. For your development you can use any of the following languages: C++, Python, MATLAB Note that the data are available in the form of a ROS bag. The IMU data are collected using the VI-Sensor on-board the Firefly MAV. ROSBAG with IMU Data: Download Programming Language: C++, Python, MATLAB Deadline: March 18, 2016
78 Find out more ersion.pdf

79 Thank you! Please ask your question!
Autonomous Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 6.2: Kalman Filter Jürgen Sturm Technische Universität München Motivation Bayes filter is a useful tool for state
Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 6.2: Kalman Filter Jürgen Sturm Technische Universität München Motivation Bayes filter is a useful tool for state
Introduction to Mobile Robotics Probabilistic Robotics
 Introduction to Mobile Robotics Probabilistic Robotics Wolfram Burgard 1 Probabilistic Robotics Key idea: Explicit representation of uncertainty (using the calculus of probability theory) Perception Action
Introduction to Mobile Robotics Probabilistic Robotics Wolfram Burgard 1 Probabilistic Robotics Key idea: Explicit representation of uncertainty (using the calculus of probability theory) Perception Action
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: Extended Kalman Filter Dr. Kostas Alexis (CSE) These slides relied on the lectures from C. Stachniss, J. Sturm and the book Probabilistic Robotics from Thurn et al.
Autonomous Mobile Robot Design Topic: Extended Kalman Filter Dr. Kostas Alexis (CSE) These slides relied on the lectures from C. Stachniss, J. Sturm and the book Probabilistic Robotics from Thurn et al.
2D Image Processing. Bayes filter implementation: Kalman filter
 2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
Probabilistic Robotics
 Probabilistic Robotics Overview of probability, Representing uncertainty Propagation of uncertainty, Bayes Rule Application to Localization and Mapping Slides from Autonomous Robots (Siegwart and Nourbaksh),
Probabilistic Robotics Overview of probability, Representing uncertainty Propagation of uncertainty, Bayes Rule Application to Localization and Mapping Slides from Autonomous Robots (Siegwart and Nourbaksh),
2D Image Processing. Bayes filter implementation: Kalman filter
 2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Dr. Gabriele Bleser Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche
2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Dr. Gabriele Bleser Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche
Markov localization uses an explicit, discrete representation for the probability of all position in the state space.
 Markov Kalman Filter Localization Markov localization localization starting from any unknown position recovers from ambiguous situation. However, to update the probability of all positions within the whole
Markov Kalman Filter Localization Markov localization localization starting from any unknown position recovers from ambiguous situation. However, to update the probability of all positions within the whole
Bayes Filter Reminder. Kalman Filter Localization. Properties of Gaussians. Gaussians. Prediction. Correction. σ 2. Univariate. 1 2πσ e.
 Kalman Filter Localization Bayes Filter Reminder Prediction Correction Gaussians p(x) ~ N(µ,σ 2 ) : Properties of Gaussians Univariate p(x) = 1 1 2πσ e 2 (x µ) 2 σ 2 µ Univariate -σ σ Multivariate µ Multivariate
Kalman Filter Localization Bayes Filter Reminder Prediction Correction Gaussians p(x) ~ N(µ,σ 2 ) : Properties of Gaussians Univariate p(x) = 1 1 2πσ e 2 (x µ) 2 σ 2 µ Univariate -σ σ Multivariate µ Multivariate
Introduction to Mobile Robotics Bayes Filter Kalman Filter
 Introduction to Mobile Robotics Bayes Filter Kalman Filter Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Giorgio Grisetti, Kai Arras 1 Bayes Filter Reminder 1. Algorithm Bayes_filter( Bel(x),d ):
Introduction to Mobile Robotics Bayes Filter Kalman Filter Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Giorgio Grisetti, Kai Arras 1 Bayes Filter Reminder 1. Algorithm Bayes_filter( Bel(x),d ):
Modeling and state estimation Examples State estimation Probabilities Bayes filter Particle filter. Modeling. CSC752 Autonomous Robotic Systems
 Modeling CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami February 21, 2017 Outline 1 Modeling and state estimation 2 Examples 3 State estimation 4 Probabilities
Modeling CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami February 21, 2017 Outline 1 Modeling and state estimation 2 Examples 3 State estimation 4 Probabilities
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: Particle Filter for Localization Dr. Kostas Alexis (CSE) These slides relied on the lectures from C. Stachniss, and the book Probabilistic Robotics from Thurn et al.
Autonomous Mobile Robot Design Topic: Particle Filter for Localization Dr. Kostas Alexis (CSE) These slides relied on the lectures from C. Stachniss, and the book Probabilistic Robotics from Thurn et al.
CIS 390 Fall 2016 Robotics: Planning and Perception Final Review Questions
 CIS 390 Fall 2016 Robotics: Planning and Perception Final Review Questions December 14, 2016 Questions Throughout the following questions we will assume that x t is the state vector at time t, z t is the
CIS 390 Fall 2016 Robotics: Planning and Perception Final Review Questions December 14, 2016 Questions Throughout the following questions we will assume that x t is the state vector at time t, z t is the
Kalman filtering and friends: Inference in time series models. Herke van Hoof slides mostly by Michael Rubinstein
 Kalman filtering and friends: Inference in time series models Herke van Hoof slides mostly by Michael Rubinstein Problem overview Goal Estimate most probable state at time k using measurement up to time
Kalman filtering and friends: Inference in time series models Herke van Hoof slides mostly by Michael Rubinstein Problem overview Goal Estimate most probable state at time k using measurement up to time
CS491/691: Introduction to Aerial Robotics
 CS491/691: Introduction to Aerial Robotics Topic: Midterm Preparation Dr. Kostas Alexis (CSE) Areas of Focus Coordinate system transformations (CST) MAV Dynamics (MAVD) Navigation Sensors (NS) State Estimation
CS491/691: Introduction to Aerial Robotics Topic: Midterm Preparation Dr. Kostas Alexis (CSE) Areas of Focus Coordinate system transformations (CST) MAV Dynamics (MAVD) Navigation Sensors (NS) State Estimation
Probabilistic Robotics. Slides from Autonomous Robots (Siegwart and Nourbaksh), Chapter 5 Probabilistic Robotics (S. Thurn et al.
, Chapter 5 Probabilistic Robotics (S. Thurn et al.") robabilistic Robotics Slides from Autonomous Robots Siegwart and Nourbaksh Chapter 5 robabilistic Robotics S. Thurn et al. Today Overview of probability Representing uncertainty ropagation of uncertainty
robabilistic Robotics Slides from Autonomous Robots Siegwart and Nourbaksh Chapter 5 robabilistic Robotics S. Thurn et al. Today Overview of probability Representing uncertainty ropagation of uncertainty
Mobile Robotics II: Simultaneous localization and mapping
 Mobile Robotics II: Simultaneous localization and mapping Introduction: probability theory, estimation Miroslav Kulich Intelligent and Mobile Robotics Group Gerstner Laboratory for Intelligent Decision
Mobile Robotics II: Simultaneous localization and mapping Introduction: probability theory, estimation Miroslav Kulich Intelligent and Mobile Robotics Group Gerstner Laboratory for Intelligent Decision
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Probabilistic Fundamentals in Robotics Gaussian Filters Course Outline Basic mathematical framework Probabilistic models of mobile robots Mobile
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Probabilistic Fundamentals in Robotics Gaussian Filters Course Outline Basic mathematical framework Probabilistic models of mobile robots Mobile
CSE 473: Artificial Intelligence
 CSE 473: Artificial Intelligence Hidden Markov Models Dieter Fox --- University of Washington [Most slides were created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All CS188 materials
CSE 473: Artificial Intelligence Hidden Markov Models Dieter Fox --- University of Washington [Most slides were created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All CS188 materials
Linear Dynamical Systems
 Linear Dynamical Systems Sargur N. srihari@cedar.buffalo.edu Machine Learning Course: http://www.cedar.buffalo.edu/~srihari/cse574/index.html Two Models Described by Same Graph Latent variables Observations
Linear Dynamical Systems Sargur N. srihari@cedar.buffalo.edu Machine Learning Course: http://www.cedar.buffalo.edu/~srihari/cse574/index.html Two Models Described by Same Graph Latent variables Observations
CS 532: 3D Computer Vision 6 th Set of Notes
 1 CS 532: 3D Computer Vision 6 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Lecture Outline Intro to Covariance
1 CS 532: 3D Computer Vision 6 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Lecture Outline Intro to Covariance
EKF and SLAM. McGill COMP 765 Sept 18 th, 2017
 EKF and SLAM McGill COMP 765 Sept 18 th, 2017 Outline News and information Instructions for paper presentations Continue on Kalman filter: EKF and extension to mapping Example of a real mapping system:
EKF and SLAM McGill COMP 765 Sept 18 th, 2017 Outline News and information Instructions for paper presentations Continue on Kalman filter: EKF and extension to mapping Example of a real mapping system:
CS 188: Artificial Intelligence Spring 2009
 CS 188: Artificial Intelligence Spring 2009 Lecture 21: Hidden Markov Models 4/7/2009 John DeNero UC Berkeley Slides adapted from Dan Klein Announcements Written 3 deadline extended! Posted last Friday
CS 188: Artificial Intelligence Spring 2009 Lecture 21: Hidden Markov Models 4/7/2009 John DeNero UC Berkeley Slides adapted from Dan Klein Announcements Written 3 deadline extended! Posted last Friday
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: Micro Aerial Vehicle Dynamics Dr. Kostas Alexis (CSE) Goal of this lecture The goal of this lecture is to derive the equations of motion that describe the motion of
Autonomous Mobile Robot Design Topic: Micro Aerial Vehicle Dynamics Dr. Kostas Alexis (CSE) Goal of this lecture The goal of this lecture is to derive the equations of motion that describe the motion of
Particle Filters. Pieter Abbeel UC Berkeley EECS. Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics
 Particle Filters Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Motivation For continuous spaces: often no analytical formulas for Bayes filter updates
Particle Filters Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Motivation For continuous spaces: often no analytical formulas for Bayes filter updates
Particle Filters; Simultaneous Localization and Mapping (Intelligent Autonomous Robotics) Subramanian Ramamoorthy School of Informatics
 Subramanian Ramamoorthy School of Informatics") Particle Filters; Simultaneous Localization and Mapping (Intelligent Autonomous Robotics) Subramanian Ramamoorthy School of Informatics Recap: State Estimation using Kalman Filter Project state and error
Particle Filters; Simultaneous Localization and Mapping (Intelligent Autonomous Robotics) Subramanian Ramamoorthy School of Informatics Recap: State Estimation using Kalman Filter Project state and error
2D Image Processing (Extended) Kalman and particle filter
 Kalman and particle filter") 2D Image Processing (Extended) Kalman and particle filter Prof. Didier Stricker Dr. Gabriele Bleser Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz
2D Image Processing (Extended) Kalman and particle filter Prof. Didier Stricker Dr. Gabriele Bleser Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz
CSEP 573: Artificial Intelligence
 CSEP 573: Artificial Intelligence Hidden Markov Models Luke Zettlemoyer Many slides over the course adapted from either Dan Klein, Stuart Russell, Andrew Moore, Ali Farhadi, or Dan Weld 1 Outline Probabilistic
CSEP 573: Artificial Intelligence Hidden Markov Models Luke Zettlemoyer Many slides over the course adapted from either Dan Klein, Stuart Russell, Andrew Moore, Ali Farhadi, or Dan Weld 1 Outline Probabilistic
L06. LINEAR KALMAN FILTERS. NA568 Mobile Robotics: Methods & Algorithms
 L06. LINEAR KALMAN FILTERS NA568 Mobile Robotics: Methods & Algorithms 2 PS2 is out! Landmark-based Localization: EKF, UKF, PF Today s Lecture Minimum Mean Square Error (MMSE) Linear Kalman Filter Gaussian
L06. LINEAR KALMAN FILTERS NA568 Mobile Robotics: Methods & Algorithms 2 PS2 is out! Landmark-based Localization: EKF, UKF, PF Today s Lecture Minimum Mean Square Error (MMSE) Linear Kalman Filter Gaussian
Probabilistic Fundamentals in Robotics. DAUIN Politecnico di Torino July 2010
 Probabilistic Fundamentals in Robotics Gaussian Filters Basilio Bona DAUIN Politecnico di Torino July 2010 Course Outline Basic mathematical framework Probabilistic models of mobile robots Mobile robot
Probabilistic Fundamentals in Robotics Gaussian Filters Basilio Bona DAUIN Politecnico di Torino July 2010 Course Outline Basic mathematical framework Probabilistic models of mobile robots Mobile robot
Announcements. CS 188: Artificial Intelligence Fall Markov Models. Example: Markov Chain. Mini-Forward Algorithm. Example
 CS 88: Artificial Intelligence Fall 29 Lecture 9: Hidden Markov Models /3/29 Announcements Written 3 is up! Due on /2 (i.e. under two weeks) Project 4 up very soon! Due on /9 (i.e. a little over two weeks)
CS 88: Artificial Intelligence Fall 29 Lecture 9: Hidden Markov Models /3/29 Announcements Written 3 is up! Due on /2 (i.e. under two weeks) Project 4 up very soon! Due on /9 (i.e. a little over two weeks)
From Bayes to Extended Kalman Filter
 From Bayes to Extended Kalman Filter Michal Reinštein Czech Technical University in Prague Faculty of Electrical Engineering, Department of Cybernetics Center for Machine Perception http://cmp.felk.cvut.cz/
From Bayes to Extended Kalman Filter Michal Reinštein Czech Technical University in Prague Faculty of Electrical Engineering, Department of Cybernetics Center for Machine Perception http://cmp.felk.cvut.cz/
L11. EKF SLAM: PART I. NA568 Mobile Robotics: Methods & Algorithms
 L11. EKF SLAM: PART I NA568 Mobile Robotics: Methods & Algorithms Today s Topic EKF Feature-Based SLAM State Representation Process / Observation Models Landmark Initialization Robot-Landmark Correlation
L11. EKF SLAM: PART I NA568 Mobile Robotics: Methods & Algorithms Today s Topic EKF Feature-Based SLAM State Representation Process / Observation Models Landmark Initialization Robot-Landmark Correlation
AUTOMOTIVE ENVIRONMENT SENSORS
 AUTOMOTIVE ENVIRONMENT SENSORS Lecture 5. Localization BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Related concepts Concepts related to vehicles moving
AUTOMOTIVE ENVIRONMENT SENSORS Lecture 5. Localization BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Related concepts Concepts related to vehicles moving
Dynamic System Identification using HDMR-Bayesian Technique
 Dynamic System Identification using HDMR-Bayesian Technique *Shereena O A 1) and Dr. B N Rao 2) 1), 2) Department of Civil Engineering, IIT Madras, Chennai 600036, Tamil Nadu, India 1) ce14d020@smail.iitm.ac.in
Dynamic System Identification using HDMR-Bayesian Technique *Shereena O A 1) and Dr. B N Rao 2) 1), 2) Department of Civil Engineering, IIT Madras, Chennai 600036, Tamil Nadu, India 1) ce14d020@smail.iitm.ac.in
Lecture 9. Time series prediction
 Lecture 9 Time series prediction Prediction is about function fitting To predict we need to model There are a bewildering number of models for data we look at some of the major approaches in this lecture
Lecture 9 Time series prediction Prediction is about function fitting To predict we need to model There are a bewildering number of models for data we look at some of the major approaches in this lecture
Simultaneous Localization and Mapping (SLAM) Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo") Simultaneous Localization and Mapping (SLAM) Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Introduction SLAM asks the following question: Is it possible for an autonomous vehicle
Simultaneous Localization and Mapping (SLAM) Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Introduction SLAM asks the following question: Is it possible for an autonomous vehicle
State Estimation of Linear and Nonlinear Dynamic Systems
 State Estimation of Linear and Nonlinear Dynamic Systems Part I: Linear Systems with Gaussian Noise James B. Rawlings and Fernando V. Lima Department of Chemical and Biological Engineering University of
State Estimation of Linear and Nonlinear Dynamic Systems Part I: Linear Systems with Gaussian Noise James B. Rawlings and Fernando V. Lima Department of Chemical and Biological Engineering University of
Lecture Note 2: Estimation and Information Theory
 Univ. of Michigan - NAME 568/EECS 568/ROB 530 Winter 2018 Lecture Note 2: Estimation and Information Theory Lecturer: Maani Ghaffari Jadidi Date: April 6, 2018 2.1 Estimation A static estimation problem
Univ. of Michigan - NAME 568/EECS 568/ROB 530 Winter 2018 Lecture Note 2: Estimation and Information Theory Lecturer: Maani Ghaffari Jadidi Date: April 6, 2018 2.1 Estimation A static estimation problem
Ensemble Data Assimilation and Uncertainty Quantification
 Ensemble Data Assimilation and Uncertainty Quantification Jeff Anderson National Center for Atmospheric Research pg 1 What is Data Assimilation? Observations combined with a Model forecast + to produce
Ensemble Data Assimilation and Uncertainty Quantification Jeff Anderson National Center for Atmospheric Research pg 1 What is Data Assimilation? Observations combined with a Model forecast + to produce
Mobile Robot Localization
 Mobile Robot Localization 1 The Problem of Robot Localization Given a map of the environment, how can a robot determine its pose (planar coordinates + orientation)? Two sources of uncertainty: - observations
Mobile Robot Localization 1 The Problem of Robot Localization Given a map of the environment, how can a robot determine its pose (planar coordinates + orientation)? Two sources of uncertainty: - observations
Mobile Robot Localization
 Mobile Robot Localization 1 The Problem of Robot Localization Given a map of the environment, how can a robot determine its pose (planar coordinates + orientation)? Two sources of uncertainty: - observations
Mobile Robot Localization 1 The Problem of Robot Localization Given a map of the environment, how can a robot determine its pose (planar coordinates + orientation)? Two sources of uncertainty: - observations
Maximum Likelihood (ML), Expectation Maximization (EM) Pieter Abbeel UC Berkeley EECS
, Expectation Maximization (EM) Pieter Abbeel UC Berkeley EECS") Maximum Likelihood (ML), Expectation Maximization (EM) Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Outline Maximum likelihood (ML) Priors, and
Maximum Likelihood (ML), Expectation Maximization (EM) Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Outline Maximum likelihood (ML) Priors, and
Probabilistic Graphical Models
 Probabilistic Graphical Models Lecture 12 Dynamical Models CS/CNS/EE 155 Andreas Krause Homework 3 out tonight Start early!! Announcements Project milestones due today Please email to TAs 2 Parameter learning
Probabilistic Graphical Models Lecture 12 Dynamical Models CS/CNS/EE 155 Andreas Krause Homework 3 out tonight Start early!! Announcements Project milestones due today Please email to TAs 2 Parameter learning
Hidden Markov Models. Vibhav Gogate The University of Texas at Dallas
 Hidden Markov Models Vibhav Gogate The University of Texas at Dallas Intro to AI (CS 4365) Many slides over the course adapted from either Dan Klein, Luke Zettlemoyer, Stuart Russell or Andrew Moore 1
Hidden Markov Models Vibhav Gogate The University of Texas at Dallas Intro to AI (CS 4365) Many slides over the course adapted from either Dan Klein, Luke Zettlemoyer, Stuart Russell or Andrew Moore 1
Bayesian Regression Linear and Logistic Regression
 When we want more than point estimates Bayesian Regression Linear and Logistic Regression Nicole Beckage Ordinary Least Squares Regression and Lasso Regression return only point estimates But what if we
When we want more than point estimates Bayesian Regression Linear and Logistic Regression Nicole Beckage Ordinary Least Squares Regression and Lasso Regression return only point estimates But what if we
Miscellaneous. Regarding reading materials. Again, ask questions (if you have) and ask them earlier
 and ask them earlier") Miscellaneous Regarding reading materials Reading materials will be provided as needed If no assigned reading, it means I think the material from class is sufficient Should be enough for you to do your
Miscellaneous Regarding reading materials Reading materials will be provided as needed If no assigned reading, it means I think the material from class is sufficient Should be enough for you to do your
Discrete Probability and State Estimation
 6.01, Fall Semester, 2007 Lecture 12 Notes 1 MASSACHVSETTS INSTITVTE OF TECHNOLOGY Department of Electrical Engineering and Computer Science 6.01 Introduction to EECS I Fall Semester, 2007 Lecture 12 Notes
6.01, Fall Semester, 2007 Lecture 12 Notes 1 MASSACHVSETTS INSTITVTE OF TECHNOLOGY Department of Electrical Engineering and Computer Science 6.01 Introduction to EECS I Fall Semester, 2007 Lecture 12 Notes
CS 5522: Artificial Intelligence II
 CS 5522: Artificial Intelligence II Hidden Markov Models Instructor: Alan Ritter Ohio State University [These slides were adapted from CS188 Intro to AI at UC Berkeley. All materials available at http://ai.berkeley.edu.]
CS 5522: Artificial Intelligence II Hidden Markov Models Instructor: Alan Ritter Ohio State University [These slides were adapted from CS188 Intro to AI at UC Berkeley. All materials available at http://ai.berkeley.edu.]
CS 5522: Artificial Intelligence II
 CS 5522: Artificial Intelligence II Hidden Markov Models Instructor: Wei Xu Ohio State University [These slides were adapted from CS188 Intro to AI at UC Berkeley.] Pacman Sonar (P4) [Demo: Pacman Sonar
CS 5522: Artificial Intelligence II Hidden Markov Models Instructor: Wei Xu Ohio State University [These slides were adapted from CS188 Intro to AI at UC Berkeley.] Pacman Sonar (P4) [Demo: Pacman Sonar
Robotics. Mobile Robotics. Marc Toussaint U Stuttgart
 Robotics Mobile Robotics State estimation, Bayes filter, odometry, particle filter, Kalman filter, SLAM, joint Bayes filter, EKF SLAM, particle SLAM, graph-based SLAM Marc Toussaint U Stuttgart DARPA Grand
Robotics Mobile Robotics State estimation, Bayes filter, odometry, particle filter, Kalman filter, SLAM, joint Bayes filter, EKF SLAM, particle SLAM, graph-based SLAM Marc Toussaint U Stuttgart DARPA Grand
9 Forward-backward algorithm, sum-product on factor graphs
 Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science 6.438 Algorithms For Inference Fall 2014 9 Forward-backward algorithm, sum-product on factor graphs The previous
Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science 6.438 Algorithms For Inference Fall 2014 9 Forward-backward algorithm, sum-product on factor graphs The previous
Robotics. Lecture 4: Probabilistic Robotics. See course website for up to date information.
 Robotics Lecture 4: Probabilistic Robotics See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College London Review: Sensors
Robotics Lecture 4: Probabilistic Robotics See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College London Review: Sensors
COS Lecture 16 Autonomous Robot Navigation
 COS 495 - Lecture 16 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
COS 495 - Lecture 16 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
Mathematical Formulation of Our Example
 Mathematical Formulation of Our Example We define two binary random variables: open and, where is light on or light off. Our question is: What is? Computer Vision 1 Combining Evidence Suppose our robot
Mathematical Formulation of Our Example We define two binary random variables: open and, where is light on or light off. Our question is: What is? Computer Vision 1 Combining Evidence Suppose our robot
Recursive Bayes Filtering
 Recursive Bayes Filtering CS485 Autonomous Robotics Amarda Shehu Fall 2013 Notes modified from Wolfram Burgard, University of Freiburg Physical Agents are Inherently Uncertain Uncertainty arises from four
Recursive Bayes Filtering CS485 Autonomous Robotics Amarda Shehu Fall 2013 Notes modified from Wolfram Burgard, University of Freiburg Physical Agents are Inherently Uncertain Uncertainty arises from four
ECE295, Data Assimila0on and Inverse Problems, Spring 2015
 ECE295, Data Assimila0on and Inverse Problems, Spring 2015 1 April, Intro; Linear discrete Inverse problems (Aster Ch 1 and 2) Slides 8 April, SVD (Aster ch 2 and 3) Slides 15 April, RegularizaFon (ch
ECE295, Data Assimila0on and Inverse Problems, Spring 2015 1 April, Intro; Linear discrete Inverse problems (Aster Ch 1 and 2) Slides 8 April, SVD (Aster ch 2 and 3) Slides 15 April, RegularizaFon (ch
Preliminary Statistics Lecture 2: Probability Theory (Outline) prelimsoas.webs.com
 prelimsoas.webs.com") 1 School of Oriental and African Studies September 2015 Department of Economics Preliminary Statistics Lecture 2: Probability Theory (Outline) prelimsoas.webs.com Gujarati D. Basic Econometrics, Appendix
1 School of Oriental and African Studies September 2015 Department of Economics Preliminary Statistics Lecture 2: Probability Theory (Outline) prelimsoas.webs.com Gujarati D. Basic Econometrics, Appendix
Sensor Tasking and Control
 Sensor Tasking and Control Sensing Networking Leonidas Guibas Stanford University Computation CS428 Sensor systems are about sensing, after all... System State Continuous and Discrete Variables The quantities
Sensor Tasking and Control Sensing Networking Leonidas Guibas Stanford University Computation CS428 Sensor systems are about sensing, after all... System State Continuous and Discrete Variables The quantities
Artificial Intelligence
 Artificial Intelligence Roman Barták Department of Theoretical Computer Science and Mathematical Logic Summary of last lecture We know how to do probabilistic reasoning over time transition model P(X t
Artificial Intelligence Roman Barták Department of Theoretical Computer Science and Mathematical Logic Summary of last lecture We know how to do probabilistic reasoning over time transition model P(X t
Sensor Fusion: Particle Filter
 Sensor Fusion: Particle Filter By: Gordana Stojceska stojcesk@in.tum.de Outline Motivation Applications Fundamentals Tracking People Advantages and disadvantages Summary June 05 JASS '05, St.Petersburg,
Sensor Fusion: Particle Filter By: Gordana Stojceska stojcesk@in.tum.de Outline Motivation Applications Fundamentals Tracking People Advantages and disadvantages Summary June 05 JASS '05, St.Petersburg,
STA 4273H: Statistical Machine Learning
 STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Statistics! rsalakhu@utstat.toronto.edu! http://www.utstat.utoronto.ca/~rsalakhu/ Sidney Smith Hall, Room 6002 Lecture 3 Linear
STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Statistics! rsalakhu@utstat.toronto.edu! http://www.utstat.utoronto.ca/~rsalakhu/ Sidney Smith Hall, Room 6002 Lecture 3 Linear
CS325 Artificial Intelligence Ch. 15,20 Hidden Markov Models and Particle Filtering
 CS325 Artificial Intelligence Ch. 15,20 Hidden Markov Models and Particle Filtering Cengiz Günay, Emory Univ. Günay Ch. 15,20 Hidden Markov Models and Particle FilteringSpring 2013 1 / 21 Get Rich Fast!
CS325 Artificial Intelligence Ch. 15,20 Hidden Markov Models and Particle Filtering Cengiz Günay, Emory Univ. Günay Ch. 15,20 Hidden Markov Models and Particle FilteringSpring 2013 1 / 21 Get Rich Fast!
Reasoning Under Uncertainty: Conditioning, Bayes Rule & the Chain Rule
 Reasoning Under Uncertainty: Conditioning, Bayes Rule & the Chain Rule Alan Mackworth UBC CS 322 Uncertainty 2 March 13, 2013 Textbook 6.1.3 Lecture Overview Recap: Probability & Possible World Semantics
Reasoning Under Uncertainty: Conditioning, Bayes Rule & the Chain Rule Alan Mackworth UBC CS 322 Uncertainty 2 March 13, 2013 Textbook 6.1.3 Lecture Overview Recap: Probability & Possible World Semantics
Intro to Probability. Andrei Barbu
 Intro to Probability Andrei Barbu Some problems Some problems A means to capture uncertainty Some problems A means to capture uncertainty You have data from two sources, are they different? Some problems
Intro to Probability Andrei Barbu Some problems Some problems A means to capture uncertainty Some problems A means to capture uncertainty You have data from two sources, are they different? Some problems
Markov Models. CS 188: Artificial Intelligence Fall Example. Mini-Forward Algorithm. Stationary Distributions.
 CS 88: Artificial Intelligence Fall 27 Lecture 2: HMMs /6/27 Markov Models A Markov model is a chain-structured BN Each node is identically distributed (stationarity) Value of X at a given time is called
CS 88: Artificial Intelligence Fall 27 Lecture 2: HMMs /6/27 Markov Models A Markov model is a chain-structured BN Each node is identically distributed (stationarity) Value of X at a given time is called
ECE521 week 3: 23/26 January 2017
 ECE521 week 3: 23/26 January 2017 Outline Probabilistic interpretation of linear regression - Maximum likelihood estimation (MLE) - Maximum a posteriori (MAP) estimation Bias-variance trade-off Linear
ECE521 week 3: 23/26 January 2017 Outline Probabilistic interpretation of linear regression - Maximum likelihood estimation (MLE) - Maximum a posteriori (MAP) estimation Bias-variance trade-off Linear
Probabilistic Robotics
 University of Rome La Sapienza Master in Artificial Intelligence and Robotics Probabilistic Robotics Prof. Giorgio Grisetti Course web site: http://www.dis.uniroma1.it/~grisetti/teaching/probabilistic_ro
University of Rome La Sapienza Master in Artificial Intelligence and Robotics Probabilistic Robotics Prof. Giorgio Grisetti Course web site: http://www.dis.uniroma1.it/~grisetti/teaching/probabilistic_ro
Announcements. CS 188: Artificial Intelligence Fall VPI Example. VPI Properties. Reasoning over Time. Markov Models. Lecture 19: HMMs 11/4/2008
 CS 88: Artificial Intelligence Fall 28 Lecture 9: HMMs /4/28 Announcements Midterm solutions up, submit regrade requests within a week Midterm course evaluation up on web, please fill out! Dan Klein UC
CS 88: Artificial Intelligence Fall 28 Lecture 9: HMMs /4/28 Announcements Midterm solutions up, submit regrade requests within a week Midterm course evaluation up on web, please fill out! Dan Klein UC
Fundamentals of Data Assimila1on
 014 GSI Community Tutorial NCAR Foothills Campus, Boulder, CO July 14-16, 014 Fundamentals of Data Assimila1on Milija Zupanski Cooperative Institute for Research in the Atmosphere Colorado State University
014 GSI Community Tutorial NCAR Foothills Campus, Boulder, CO July 14-16, 014 Fundamentals of Data Assimila1on Milija Zupanski Cooperative Institute for Research in the Atmosphere Colorado State University
Probability Theory for Machine Learning. Chris Cremer September 2015
 Probability Theory for Machine Learning Chris Cremer September 2015 Outline Motivation Probability Definitions and Rules Probability Distributions MLE for Gaussian Parameter Estimation MLE and Least Squares
Probability Theory for Machine Learning Chris Cremer September 2015 Outline Motivation Probability Definitions and Rules Probability Distributions MLE for Gaussian Parameter Estimation MLE and Least Squares
Lecture 2: From Linear Regression to Kalman Filter and Beyond
 Lecture 2: From Linear Regression to Kalman Filter and Beyond Department of Biomedical Engineering and Computational Science Aalto University January 26, 2012 Contents 1 Batch and Recursive Estimation
Lecture 2: From Linear Regression to Kalman Filter and Beyond Department of Biomedical Engineering and Computational Science Aalto University January 26, 2012 Contents 1 Batch and Recursive Estimation
Outline. CSE 573: Artificial Intelligence Autumn Agent. Partial Observability. Markov Decision Process (MDP) 10/31/2012
 10/31/2012") CSE 573: Artificial Intelligence Autumn 2012 Reasoning about Uncertainty & Hidden Markov Models Daniel Weld Many slides adapted from Dan Klein, Stuart Russell, Andrew Moore & Luke Zettlemoyer 1 Outline
CSE 573: Artificial Intelligence Autumn 2012 Reasoning about Uncertainty & Hidden Markov Models Daniel Weld Many slides adapted from Dan Klein, Stuart Russell, Andrew Moore & Luke Zettlemoyer 1 Outline
Lecture 2: From Linear Regression to Kalman Filter and Beyond
 Lecture 2: From Linear Regression to Kalman Filter and Beyond January 18, 2017 Contents 1 Batch and Recursive Estimation 2 Towards Bayesian Filtering 3 Kalman Filter and Bayesian Filtering and Smoothing
Lecture 2: From Linear Regression to Kalman Filter and Beyond January 18, 2017 Contents 1 Batch and Recursive Estimation 2 Towards Bayesian Filtering 3 Kalman Filter and Bayesian Filtering and Smoothing
ME 597: AUTONOMOUS MOBILE ROBOTICS SECTION 2 PROBABILITY. Prof. Steven Waslander
 ME 597: AUTONOMOUS MOBILE ROBOTICS SECTION 2 Prof. Steven Waslander p(a): Probability that A is true 0 pa ( ) 1 p( True) 1, p( False) 0 p( A B) p( A) p( B) p( A B) A A B B 2 Discrete Random Variable X
ME 597: AUTONOMOUS MOBILE ROBOTICS SECTION 2 Prof. Steven Waslander p(a): Probability that A is true 0 pa ( ) 1 p( True) 1, p( False) 0 p( A B) p( A) p( B) p( A B) A A B B 2 Discrete Random Variable X
CS 188: Artificial Intelligence Spring Announcements
 CS 188: Artificial Intelligence Spring 2011 Lecture 18: HMMs and Particle Filtering 4/4/2011 Pieter Abbeel --- UC Berkeley Many slides over this course adapted from Dan Klein, Stuart Russell, Andrew Moore
CS 188: Artificial Intelligence Spring 2011 Lecture 18: HMMs and Particle Filtering 4/4/2011 Pieter Abbeel --- UC Berkeley Many slides over this course adapted from Dan Klein, Stuart Russell, Andrew Moore
Probability and Information Theory. Sargur N. Srihari
 Probability and Information Theory Sargur N. srihari@cedar.buffalo.edu 1 Topics in Probability and Information Theory Overview 1. Why Probability? 2. Random Variables 3. Probability Distributions 4. Marginal
Probability and Information Theory Sargur N. srihari@cedar.buffalo.edu 1 Topics in Probability and Information Theory Overview 1. Why Probability? 2. Random Variables 3. Probability Distributions 4. Marginal
Robots Autónomos. Depto. CCIA. 2. Bayesian Estimation and sensor models. Domingo Gallardo
 Robots Autónomos 2. Bayesian Estimation and sensor models Domingo Gallardo Depto. CCIA http://www.rvg.ua.es/master/robots References Recursive State Estimation: Thrun, chapter 2 Sensor models and robot
Robots Autónomos 2. Bayesian Estimation and sensor models Domingo Gallardo Depto. CCIA http://www.rvg.ua.es/master/robots References Recursive State Estimation: Thrun, chapter 2 Sensor models and robot
Why do we care? Examples. Bayes Rule. What room am I in? Handling uncertainty over time: predicting, estimating, recognizing, learning
 Handling uncertainty over time: predicting, estimating, recognizing, learning Chris Atkeson 004 Why do we care? Speech recognition makes use of dependence of words and phonemes across time. Knowing where
Handling uncertainty over time: predicting, estimating, recognizing, learning Chris Atkeson 004 Why do we care? Speech recognition makes use of dependence of words and phonemes across time. Knowing where
STA 4273H: Statistical Machine Learning
 STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Statistics! rsalakhu@utstat.toronto.edu! http://www.utstat.utoronto.ca/~rsalakhu/ Sidney Smith Hall, Room 6002 Lecture 11 Project
STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Statistics! rsalakhu@utstat.toronto.edu! http://www.utstat.utoronto.ca/~rsalakhu/ Sidney Smith Hall, Room 6002 Lecture 11 Project
Distributed Data Fusion with Kalman Filters. Simon Julier Computer Science Department University College London
 Distributed Data Fusion with Kalman Filters Simon Julier Computer Science Department University College London S.Julier@cs.ucl.ac.uk Structure of Talk Motivation Kalman Filters Double Counting Optimal
Distributed Data Fusion with Kalman Filters Simon Julier Computer Science Department University College London S.Julier@cs.ucl.ac.uk Structure of Talk Motivation Kalman Filters Double Counting Optimal
Markov Chains and Hidden Markov Models
 Markov Chains and Hidden Markov Models CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2018 Soleymani Slides are based on Klein and Abdeel, CS188, UC Berkeley. Reasoning
Markov Chains and Hidden Markov Models CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2018 Soleymani Slides are based on Klein and Abdeel, CS188, UC Berkeley. Reasoning
Approximate Inference
 Approximate Inference Simulation has a name: sampling Sampling is a hot topic in machine learning, and it s really simple Basic idea: Draw N samples from a sampling distribution S Compute an approximate
Approximate Inference Simulation has a name: sampling Sampling is a hot topic in machine learning, and it s really simple Basic idea: Draw N samples from a sampling distribution S Compute an approximate
Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization
 Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras 1 Motivation Recall: Discrete filter Discretize the
Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras 1 Motivation Recall: Discrete filter Discretize the
Introduction to Stochastic Processes
 Stat251/551 (Spring 2017) Stochastic Processes Lecture: 1 Introduction to Stochastic Processes Lecturer: Sahand Negahban Scribe: Sahand Negahban 1 Organization Issues We will use canvas as the course webpage.
Stat251/551 (Spring 2017) Stochastic Processes Lecture: 1 Introduction to Stochastic Processes Lecturer: Sahand Negahban Scribe: Sahand Negahban 1 Organization Issues We will use canvas as the course webpage.
EKF, UKF. Pieter Abbeel UC Berkeley EECS. Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics
 EKF, UKF Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Kalman Filter Kalman Filter = special case of a Bayes filter with dynamics model and sensory
EKF, UKF Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Kalman Filter Kalman Filter = special case of a Bayes filter with dynamics model and sensory
Kalman Filter Computer Vision (Kris Kitani) Carnegie Mellon University
 Carnegie Mellon University") Kalman Filter 16-385 Computer Vision (Kris Kitani) Carnegie Mellon University Examples up to now have been discrete (binary) random variables Kalman filtering can be seen as a special case of a temporal
Kalman Filter 16-385 Computer Vision (Kris Kitani) Carnegie Mellon University Examples up to now have been discrete (binary) random variables Kalman filtering can be seen as a special case of a temporal
EKF, UKF. Pieter Abbeel UC Berkeley EECS. Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics
 EKF, UKF Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Kalman Filter Kalman Filter = special case of a Bayes filter with dynamics model and sensory
EKF, UKF Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Kalman Filter Kalman Filter = special case of a Bayes filter with dynamics model and sensory
Data Assimilation Research Testbed Tutorial
 Data Assimilation Research Testbed Tutorial Section 2: How should observations of a state variable impact an unobserved state variable? Multivariate assimilation. Single observed variable, single unobserved
Data Assimilation Research Testbed Tutorial Section 2: How should observations of a state variable impact an unobserved state variable? Multivariate assimilation. Single observed variable, single unobserved
Bayesian Networks BY: MOHAMAD ALSABBAGH
 Bayesian Networks BY: MOHAMAD ALSABBAGH Outlines Introduction Bayes Rule Bayesian Networks (BN) Representation Size of a Bayesian Network Inference via BN BN Learning Dynamic BN Introduction Conditional
Bayesian Networks BY: MOHAMAD ALSABBAGH Outlines Introduction Bayes Rule Bayesian Networks (BN) Representation Size of a Bayesian Network Inference via BN BN Learning Dynamic BN Introduction Conditional
Dynamic models 1 Kalman filters, linearization,
 Koller & Friedman: Chapter 16 Jordan: Chapters 13, 15 Uri Lerner s Thesis: Chapters 3,9 Dynamic models 1 Kalman filters, linearization, Switching KFs, Assumed density filters Probabilistic Graphical Models
Koller & Friedman: Chapter 16 Jordan: Chapters 13, 15 Uri Lerner s Thesis: Chapters 3,9 Dynamic models 1 Kalman filters, linearization, Switching KFs, Assumed density filters Probabilistic Graphical Models
Partially Observable Markov Decision Processes (POMDPs)
") Partially Observable Markov Decision Processes (POMDPs) Sachin Patil Guest Lecture: CS287 Advanced Robotics Slides adapted from Pieter Abbeel, Alex Lee Outline Introduction to POMDPs Locally Optimal Solutions
Partially Observable Markov Decision Processes (POMDPs) Sachin Patil Guest Lecture: CS287 Advanced Robotics Slides adapted from Pieter Abbeel, Alex Lee Outline Introduction to POMDPs Locally Optimal Solutions
Localization. Howie Choset Adapted from slides by Humphrey Hu, Trevor Decker, and Brad Neuman
 Localization Howie Choset Adapted from slides by Humphrey Hu, Trevor Decker, and Brad Neuman Localization General robotic task Where am I? Techniques generalize to many estimation tasks System parameter
Localization Howie Choset Adapted from slides by Humphrey Hu, Trevor Decker, and Brad Neuman Localization General robotic task Where am I? Techniques generalize to many estimation tasks System parameter
The Kalman Filter ImPr Talk
 The Kalman Filter ImPr Talk Ged Ridgway Centre for Medical Image Computing November, 2006 Outline What is the Kalman Filter? State Space Models Kalman Filter Overview Bayesian Updating of Estimates Kalman
The Kalman Filter ImPr Talk Ged Ridgway Centre for Medical Image Computing November, 2006 Outline What is the Kalman Filter? State Space Models Kalman Filter Overview Bayesian Updating of Estimates Kalman
Probability, Entropy, and Inference / More About Inference
 Probability, Entropy, and Inference / More About Inference Mário S. Alvim (msalvim@dcc.ufmg.br) Information Theory DCC-UFMG (2018/02) Mário S. Alvim (msalvim@dcc.ufmg.br) Probability, Entropy, and Inference
Probability, Entropy, and Inference / More About Inference Mário S. Alvim (msalvim@dcc.ufmg.br) Information Theory DCC-UFMG (2018/02) Mário S. Alvim (msalvim@dcc.ufmg.br) Probability, Entropy, and Inference
CSE 473: Artificial Intelligence Spring 2014
 CSE 473: Artificial Intelligence Spring 2014 Hidden Markov Models Hanna Hajishirzi Many slides adapted from Dan Weld, Pieter Abbeel, Dan Klein, Stuart Russell, Andrew Moore & Luke Zettlemoyer 1 Outline
CSE 473: Artificial Intelligence Spring 2014 Hidden Markov Models Hanna Hajishirzi Many slides adapted from Dan Weld, Pieter Abbeel, Dan Klein, Stuart Russell, Andrew Moore & Luke Zettlemoyer 1 Outline
PROBABILISTIC REASONING OVER TIME
 PROBABILISTIC REASONING OVER TIME In which we try to interpret the present, understand the past, and perhaps predict the future, even when very little is crystal clear. Outline Time and uncertainty Inference:
PROBABILISTIC REASONING OVER TIME In which we try to interpret the present, understand the past, and perhaps predict the future, even when very little is crystal clear. Outline Time and uncertainty Inference:
Gaussians. Pieter Abbeel UC Berkeley EECS. Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics
 Gaussians Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Outline Univariate Gaussian Multivariate Gaussian Law of Total Probability Conditioning
Gaussians Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Outline Univariate Gaussian Multivariate Gaussian Law of Total Probability Conditioning
Navigation. Global Pathing. The Idea. Diagram I: Overall Navigation
 Navigation Diagram I: Overall Navigation Global Pathing The Idea (focus on 2D coordinates Takes advantage of prior info: navigation space/ dimensions target destination location Risks: Map Resolution too
Navigation Diagram I: Overall Navigation Global Pathing The Idea (focus on 2D coordinates Takes advantage of prior info: navigation space/ dimensions target destination location Risks: Map Resolution too
Bayesian Approaches Data Mining Selected Technique
 Bayesian Approaches Data Mining Selected Technique Henry Xiao xiao@cs.queensu.ca School of Computing Queen s University Henry Xiao CISC 873 Data Mining p. 1/17 Probabilistic Bases Review the fundamentals
Bayesian Approaches Data Mining Selected Technique Henry Xiao xiao@cs.queensu.ca School of Computing Queen s University Henry Xiao CISC 873 Data Mining p. 1/17 Probabilistic Bases Review the fundamentals
Nonparametric Bayesian Methods (Gaussian Processes)
") [70240413 Statistical Machine Learning, Spring, 2015] Nonparametric Bayesian Methods (Gaussian Processes) Jun Zhu dcszj@mail.tsinghua.edu.cn http://bigml.cs.tsinghua.edu.cn/~jun State Key Lab of Intelligent
[70240413 Statistical Machine Learning, Spring, 2015] Nonparametric Bayesian Methods (Gaussian Processes) Jun Zhu dcszj@mail.tsinghua.edu.cn http://bigml.cs.tsinghua.edu.cn/~jun State Key Lab of Intelligent