CSEP 573: Artificial Intelligence
|
|
|
- Emily Fitzgerald
- 5 years ago
- Views:
Transcription
1 CSEP 573: Artificial Intelligence Hidden Markov Models Luke Zettlemoyer Many slides over the course adapted from either Dan Klein, Stuart Russell, Andrew Moore, Ali Farhadi, or Dan Weld 1
2 Outline Probabilistic sequence models (and inference) Markov Chains Hidden Markov Models Particle Filters
 E.g. P(R = yellow G=(1,1)) = 0.")
3 Ghostbusters, Revisited Let s say we have two distributions: Prior distribution over ghost location: P(G) Let s say this is uniform Sensor reading model: P(R G) Given: we know what our sensors do R = reading color measured at (1,1) E.g. P(R = yellow G=(1,1)) = 0.1 We can calculate the posterior distribution P(G r) over ghost locations given a reading using Bayes rule:
4 Markov Models (Markov Chains) A Markov model is: a MDP with no actions (and no rewards) a chain-structured Bayesian Network (BN) X 1 X 2 X 3 X 4 X N A Markov model includes: Random variables X t for all time steps t (the state) Parameters: called transition probabilities or dynamics, specify how the state evolves over time (also, initial probs) and P (X t X t 1 )
5 Markov Models (Markov Chains) X 1 X 2 X 3 X 4 X N A Markov model defines a joint probability distribution: P (X 1,...,X n )=P (X 1 ) NY P (X t X t 1 ) t=2 One common inference problem: Compute marginals P(X t ) for all time steps t
6 Conditional Independence X 1 X 2 X 3 X 4 Basic conditional independence: Past and future independent of the present Each time step only depends on the previous This is called the (first order) Markov property Note that the chain is just a (growing) BN As we will see later, we can use generic BN reasoning on it if we truncate the chain at a fixed length
7 Example: Markov Chain Weather: States: X = {rain, sun} Transitions: rain 0.1 sun Initial distribution: 1.0 sun What s the probability distribution after one step? 0.1 This is a conditional distribution
8 Markov Chain Inference Question: probability of being in state x at time t? Slow answer: Enumerate all sequences of length t which end in s Add up their probabilities
9 Mini-Forward Algorithm Question: What s P(X) on some day t? We don t need to enumerate every sequence! sun sun sun sun rain rain rain rain Forward simulation
10 Proof that X P (x t )= P (x 1,...,x t ) x 1,...,x = X t 1 ty P (x 1 ) P (x i x i 1 ) x = X 1,...,x t 1 i=1 X ty 1 P (x t x t 1 ) P (x 1 ) P (x i x i 1 ) x t 1 x 1,...,x t 2 i=1 = X X P (x t x t 1 ) P (x 1,...,x t 1 ) x t 1 x 1,...,x t 2 = X x t 1 P (x t x t 1 )P (x t 1 )
11 Example From initial observation of sun P(X 1 ) P(X 2 ) P(X 3 ) P(X ) From initial observation of rain P(X 1 ) P(X 2 ) P(X 3 ) P(X )
12 Stationary Distributions If we simulate the chain long enough: What happens? Uncertainty accumulates Eventually, we have no idea what the state is! Stationary distributions: For most chains, the distribution we end up in is independent of the initial distribution Called the stationary distribution of the chain Usually, can only predict a short time out

13 Pac-man Markov Chain Pac-man knows the ghost s initial position, but gets no observations!
14 Web Link Analysis PageRank over a web graph Each web page is a state Initial distribution: uniform over pages Transitions: With prob. c, uniform jump to a random page (dotted lines, not all shown) With prob. 1-c, follow a random outlink (solid lines) Stationary distribution Will spend more time on highly reachable pages E.g. many ways to get to the Acrobat Reader download page Somewhat robust to link spam Google 1.0 returned the set of pages containing all your keywords in decreasing rank, now all search engines use link analysis along with many other factors (rank actually getting less important over time)
15 Hidden Markov Models Markov chains not so useful for most agents Eventually you don t know anything anymore Need observations to update your beliefs Hidden Markov models (HMMs) Underlying Markov chain over states S You observe outputs (effects) at each time step POMDPs without actions (or rewards). As a Bayes net: X 1 X 2 X 3 X 4 X N5 E 1 E 2 E 3 E 4 E 5 E N
16 Example An HMM is defined by: Initial distribution: Transitions: Emissions: P (X t X t 1 ) Y
17 Hidden Markov Models X 1 X 2 X 3 X 4 Y X N5 E 1 E 2 E 3 E 4 E N5 Defines a joint probability distribution: P (X 1,...,X n,e 1,...,E n )=P P (X 1:n,E 1:n )= Y Y P (X 1 )P (E 1 X 1 ) NY P (X t X t 1 )P (E t X t ) t=2
18 Ghostbusters HMM P(X 1 ) = uniform P(X X) = usually move clockwise, but sometimes move in a random direction or stay in place P(E X) = same sensor model as before: red means close, green means far away. 1/9 1/9 1/9 1/9 1/9 1/9 1/9 1/9 1/9 P(X 1 ) X 1 X 2 X 3 X 4 1/6 1/6 0 1/6 1/2 0 E 1 X 5 E 1 E 3 E 4 E P(X X=<1,2>)
19 HMM Computations Given joint P(X 1:n,E 1:n ) evidence E 1:n =e 1:n Inference problems include: Filtering, find P(X t e 1:t ) for all t Smoothing, find P(X t e 1:n ) for all t Most probable explanation, find x* 1:n = argmaxx 1:n P(x 1:n e 1:n )
20 Real HMM Examples Speech recognition HMMs: Observations are acoustic signals (continuous valued) States are specific positions in specific words (so, tens of thousands) Machine translation HMMs: Observations are words (tens of thousands) States are translation options Robot tracking: Observations are range readings (continuous) States are positions on a map (continuous)
21 Filtering / Monitoring Filtering, or monitoring, is the task of tracking the distribution B(X) (the belief state) over time We start with B(X) in an initial setting, usually uniform As time passes, or we get observations, we update B(X) The Kalman filter was invented in the 60 s and first implemented as a method of trajectory estimation for the Apollo program
22 Example: Robot Localization Example from Michael Pfeiffer Prob 0 1 t=0 Sensor model: never more than 1 mistake Motion model: may not execute action with small prob.
23 Example: Robot Localization Prob 0 1 t=1
24 Example: Robot Localization Prob 0 1 t=2
25 Example: Robot Localization Prob 0 1 t=3
26 Example: Robot Localization Prob 0 1 t=4
27 Example: Robot Localization Prob 0 1 t=5
28 Inference: Simple Cases X 1 X 1 X2 E 1
29 Online Belief Updates Every time step, we start with current P(X evidence) We update for time: X 1 X 2 We update for evidence: X 2 E 2
30 Passage of Time Assume we have current belief P(X evidence to date) Then, after one time step passes: X 1 X 2 Or, compactly: Basic idea: beliefs get pushed through the transitions With the B notation, we have to be careful about what time step t the belief is about, and what evidence it includes


31 Example: Passage of Time As time passes, uncertainty accumulates T = 1 T = 2 T = 5 Transition model: ghosts usually go clockwise
32 Observation Assume we have current belief P(X previous evidence): Then: X 1 Or: E 1 Basic idea: beliefs reweighted by likelihood of evidence Unlike passage of time, we have to renormalize

33 Example: Observation As we get observations, beliefs get reweighted, uncertainty decreases Before observation After observation
34 The Forward Algorithm We to know: We can derive the following updates To get, compute each entry and normalize
35 Example: Run the Filter An HMM is defined by: Initial distribution: Transitions: Emissions: P (X t X t 1 ) Y
36 Example HMM
37 Example HMM

38 Example Pac-man
39 Summary: Filtering Filtering is the inference process of finding a distribution over X T given e 1 through e T : P( X T e 1:t ) We first compute P( X 1 e 1 ): For each t from 2 to T, we have P( X t-1 e 1:t-1 ) Elapse time: compute P( X t e 1:t-1 ) Observe: compute P(X t e 1:t-1, e t ) = P( X t e 1:t )
40 Filtering Complexity Problem size: X states, E observations, T time steps Each Time Step Computation: O( X 2 ) Space: O( X ) Total Computation: O( X 2 T) Space: O( X )
41 Recap: Reasoning Over Time Stationary Markov models X 1 X 3 X 4 rain sun X Hidden Markov models X 1 X 2 X 3 X 4 E 1 X 5 E 2 E 3 E 4 E 5 X E P rain umbrella 0.9 rain no umbrella 0.1 sun umbrella 0.2 sun no umbrella 0.8
42 Particle Filtering Sometimes X is too big to use exact inference X may be too big to even store B(X) E.g. X is continuous X 2 may be too big to do updates Solution: approximate inference Track samples of X, not all values Samples are called particles Time per step is linear in the number of samples But: number needed may be large In memory: list of particles, not states This is how robot localization works in practice
43 Representation: Particles Our representation of P(X) is now a list of N particles (samples) Generally, N << X Storing map from X to counts would defeat the point P(x) approximated by number of particles with value x So, many x will have P(x) = 0! More particles, more accuracy For now, all particles have a weight of 1 Particles: (3,3) (2,3) (3,3) (3,2) (3,3) (3,2) (2,1) (3,3) (3,3) (2,1)
44 Particle Filtering: Elapse Time Each particle is moved by sampling its next position from the transition model This is like prior sampling samples frequencies reflect the transition probs Here, most samples move clockwise, but some move in another direction or stay in place This captures the passage of time If we have enough samples, close to the exact values before and after (consistent)
45 Particle Filtering: Observe Slightly trickier: Don t do rejection sampling (why not?) We don t sample the observation, we fix it This is similar to likelihood weighting, so we downweight our samples based on the evidence Note that, as before, the probabilities don t sum to one, since most have been downweighted (in fact they sum to an approximation of P(e))
46 Particle Filtering: Resample Rather than tracking weighted samples, we resample N times, we choose from our weighted sample distribution (i.e. draw with replacement) This is equivalent to renormalizing the distribution Now the update is complete for this time step, continue with the next one Old Particles: (3,3) w=0.1 (2,1) w=0.9 (2,1) w=0.9 (3,1) w=0.4 (3,2) w=0.3 (2,2) w=0.4 (1,1) w=0.4 (3,1) w=0.4 (2,1) w=0.9 (3,2) w=0.3 New Particles: (2,1) w=1 (2,1) w=1 (2,1) w=1 (3,2) w=1 (2,2) w=1 (2,1) w=1 (1,1) w=1 (3,1) w=1 (2,1) w=1 (1,1) w=1
47 X Particle Filtering Summary Represent current belief P(X evidence to date) as set of n samples (actual assignments X=x) For each new observation e: 1. Sample transition, once for each current particle x 2. For each new sample x, compute importance weights for the new evidence e: w(x 0 ) = P (e x 0 ) 3. Finally, normalize the importance weights and resample N new particles
 and so we cannot store B(X) Particle filtering is a main")
48 Robot Localization In robot localization: We know the map, but not the robot s position Observations may be vectors of range finder readings State space and readings are typically continuous (works basically like a very fine grid) and so we cannot store B(X) Particle filtering is a main technique
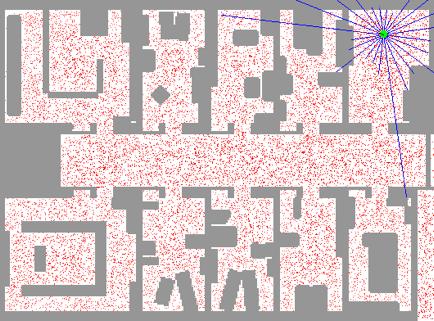
49 Robot Localization

50 Which Algorithm? Exact filter, uniform initial beliefs

51 Which Algorithm? Particle filter, uniform initial beliefs, 300 particles

52 Which Algorithm? Particle filter, uniform initial beliefs, 25 particles
53 P4: Ghostbusters Plot: Pacman's grandfather, Grandpac, learned to hunt ghosts for sport. He was blinded by his power, but could hear the ghosts banging and clanging. Transition Model: All ghosts move randomly, but are sometimes biased Emission Model: Pacman knows a noisy distance to each ghost Noisy distance prob True distance =
54 Dynamic Bayes Nets (DBNs) We want to track multiple variables over time, using multiple sources of evidence Idea: Repeat a fixed Bayes net structure at each time Variables from time t can condition on those from t-1 t =1 t =2 t =3 G 1 a G 2 a G 3 a G 1 b G 2 b G 3 b E 1 a E 1 b E 2 a E 2 b E 3 a E 3 b Discrete valued dynamic Bayes nets are also HMMs
55 DBN Particle Filters A particle is a complete sample for a time step Initialize: Generate prior samples for the t=1 Bayes net Example particle: G 1 a = (3,3) G 1 b = (5,3) Elapse time: Sample a successor for each particle Example successor: G 2 a = (2,3) G 2 b = (6,3) Observe: Weight each entire sample by the likelihood of the evidence conditioned on the sample Likelihood: P(E 1 a G 1 a ) * P(E 1 b G 1 b ) Resample: Select prior samples (tuples of values) in proportion to their likelihood
Hidden Markov Models. Vibhav Gogate The University of Texas at Dallas
 Hidden Markov Models Vibhav Gogate The University of Texas at Dallas Intro to AI (CS 4365) Many slides over the course adapted from either Dan Klein, Luke Zettlemoyer, Stuart Russell or Andrew Moore 1
Hidden Markov Models Vibhav Gogate The University of Texas at Dallas Intro to AI (CS 4365) Many slides over the course adapted from either Dan Klein, Luke Zettlemoyer, Stuart Russell or Andrew Moore 1
CS 188: Artificial Intelligence Spring Announcements
 CS 188: Artificial Intelligence Spring 2011 Lecture 18: HMMs and Particle Filtering 4/4/2011 Pieter Abbeel --- UC Berkeley Many slides over this course adapted from Dan Klein, Stuart Russell, Andrew Moore
CS 188: Artificial Intelligence Spring 2011 Lecture 18: HMMs and Particle Filtering 4/4/2011 Pieter Abbeel --- UC Berkeley Many slides over this course adapted from Dan Klein, Stuart Russell, Andrew Moore
Hidden Markov Models. Hal Daumé III. Computer Science University of Maryland CS 421: Introduction to Artificial Intelligence 19 Apr 2012
 Hidden Markov Models Hal Daumé III Computer Science University of Maryland me@hal3.name CS 421: Introduction to Artificial Intelligence 19 Apr 2012 Many slides courtesy of Dan Klein, Stuart Russell, or
Hidden Markov Models Hal Daumé III Computer Science University of Maryland me@hal3.name CS 421: Introduction to Artificial Intelligence 19 Apr 2012 Many slides courtesy of Dan Klein, Stuart Russell, or
Markov Models. CS 188: Artificial Intelligence Fall Example. Mini-Forward Algorithm. Stationary Distributions.
 CS 88: Artificial Intelligence Fall 27 Lecture 2: HMMs /6/27 Markov Models A Markov model is a chain-structured BN Each node is identically distributed (stationarity) Value of X at a given time is called
CS 88: Artificial Intelligence Fall 27 Lecture 2: HMMs /6/27 Markov Models A Markov model is a chain-structured BN Each node is identically distributed (stationarity) Value of X at a given time is called
Announcements. CS 188: Artificial Intelligence Fall Markov Models. Example: Markov Chain. Mini-Forward Algorithm. Example
 CS 88: Artificial Intelligence Fall 29 Lecture 9: Hidden Markov Models /3/29 Announcements Written 3 is up! Due on /2 (i.e. under two weeks) Project 4 up very soon! Due on /9 (i.e. a little over two weeks)
CS 88: Artificial Intelligence Fall 29 Lecture 9: Hidden Markov Models /3/29 Announcements Written 3 is up! Due on /2 (i.e. under two weeks) Project 4 up very soon! Due on /9 (i.e. a little over two weeks)
CS 188: Artificial Intelligence Spring 2009
 CS 188: Artificial Intelligence Spring 2009 Lecture 21: Hidden Markov Models 4/7/2009 John DeNero UC Berkeley Slides adapted from Dan Klein Announcements Written 3 deadline extended! Posted last Friday
CS 188: Artificial Intelligence Spring 2009 Lecture 21: Hidden Markov Models 4/7/2009 John DeNero UC Berkeley Slides adapted from Dan Klein Announcements Written 3 deadline extended! Posted last Friday
Announcements. CS 188: Artificial Intelligence Fall VPI Example. VPI Properties. Reasoning over Time. Markov Models. Lecture 19: HMMs 11/4/2008
 CS 88: Artificial Intelligence Fall 28 Lecture 9: HMMs /4/28 Announcements Midterm solutions up, submit regrade requests within a week Midterm course evaluation up on web, please fill out! Dan Klein UC
CS 88: Artificial Intelligence Fall 28 Lecture 9: HMMs /4/28 Announcements Midterm solutions up, submit regrade requests within a week Midterm course evaluation up on web, please fill out! Dan Klein UC
CS 343: Artificial Intelligence
 CS 343: Artificial Intelligence Hidden Markov Models Prof. Scott Niekum The University of Texas at Austin [These slides based on those of Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley.
CS 343: Artificial Intelligence Hidden Markov Models Prof. Scott Niekum The University of Texas at Austin [These slides based on those of Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley.
Markov Chains and Hidden Markov Models
 Markov Chains and Hidden Markov Models CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2018 Soleymani Slides are based on Klein and Abdeel, CS188, UC Berkeley. Reasoning
Markov Chains and Hidden Markov Models CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2018 Soleymani Slides are based on Klein and Abdeel, CS188, UC Berkeley. Reasoning
Probability, Markov models and HMMs. Vibhav Gogate The University of Texas at Dallas
 Probability, Markov models and HMMs Vibhav Gogate The University of Texas at Dallas CS 6364 Many slides over the course adapted from either Dan Klein, Luke Zettlemoyer, Stuart Russell and Andrew Moore
Probability, Markov models and HMMs Vibhav Gogate The University of Texas at Dallas CS 6364 Many slides over the course adapted from either Dan Klein, Luke Zettlemoyer, Stuart Russell and Andrew Moore
Approximate Inference
 Approximate Inference Simulation has a name: sampling Sampling is a hot topic in machine learning, and it s really simple Basic idea: Draw N samples from a sampling distribution S Compute an approximate
Approximate Inference Simulation has a name: sampling Sampling is a hot topic in machine learning, and it s really simple Basic idea: Draw N samples from a sampling distribution S Compute an approximate
Outline. CSE 573: Artificial Intelligence Autumn Agent. Partial Observability. Markov Decision Process (MDP) 10/31/2012
 10/31/2012") CSE 573: Artificial Intelligence Autumn 2012 Reasoning about Uncertainty & Hidden Markov Models Daniel Weld Many slides adapted from Dan Klein, Stuart Russell, Andrew Moore & Luke Zettlemoyer 1 Outline
CSE 573: Artificial Intelligence Autumn 2012 Reasoning about Uncertainty & Hidden Markov Models Daniel Weld Many slides adapted from Dan Klein, Stuart Russell, Andrew Moore & Luke Zettlemoyer 1 Outline
CSE 473: Ar+ficial Intelligence
 CSE 473: Ar+ficial Intelligence Hidden Markov Models Luke Ze@lemoyer - University of Washington [These slides were created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All CS188
CSE 473: Ar+ficial Intelligence Hidden Markov Models Luke Ze@lemoyer - University of Washington [These slides were created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All CS188
CSE 473: Artificial Intelligence Spring 2014
 CSE 473: Artificial Intelligence Spring 2014 Hidden Markov Models Hanna Hajishirzi Many slides adapted from Dan Weld, Pieter Abbeel, Dan Klein, Stuart Russell, Andrew Moore & Luke Zettlemoyer 1 Outline
CSE 473: Artificial Intelligence Spring 2014 Hidden Markov Models Hanna Hajishirzi Many slides adapted from Dan Weld, Pieter Abbeel, Dan Klein, Stuart Russell, Andrew Moore & Luke Zettlemoyer 1 Outline
CS 188: Artificial Intelligence
 CS 188: Artificial Intelligence Hidden Markov Models Instructor: Anca Dragan --- University of California, Berkeley [These slides were created by Dan Klein, Pieter Abbeel, and Anca. http://ai.berkeley.edu.]
CS 188: Artificial Intelligence Hidden Markov Models Instructor: Anca Dragan --- University of California, Berkeley [These slides were created by Dan Klein, Pieter Abbeel, and Anca. http://ai.berkeley.edu.]
CSE 473: Artificial Intelligence
 CSE 473: Artificial Intelligence Hidden Markov Models Dieter Fox --- University of Washington [Most slides were created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All CS188 materials
CSE 473: Artificial Intelligence Hidden Markov Models Dieter Fox --- University of Washington [Most slides were created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All CS188 materials
CS 5522: Artificial Intelligence II
 CS 5522: Artificial Intelligence II Hidden Markov Models Instructor: Alan Ritter Ohio State University [These slides were adapted from CS188 Intro to AI at UC Berkeley. All materials available at http://ai.berkeley.edu.]
CS 5522: Artificial Intelligence II Hidden Markov Models Instructor: Alan Ritter Ohio State University [These slides were adapted from CS188 Intro to AI at UC Berkeley. All materials available at http://ai.berkeley.edu.]
CS 5522: Artificial Intelligence II
 CS 5522: Artificial Intelligence II Hidden Markov Models Instructor: Wei Xu Ohio State University [These slides were adapted from CS188 Intro to AI at UC Berkeley.] Pacman Sonar (P4) [Demo: Pacman Sonar
CS 5522: Artificial Intelligence II Hidden Markov Models Instructor: Wei Xu Ohio State University [These slides were adapted from CS188 Intro to AI at UC Berkeley.] Pacman Sonar (P4) [Demo: Pacman Sonar
CSE 473: Ar+ficial Intelligence. Probability Recap. Markov Models - II. Condi+onal probability. Product rule. Chain rule.
 CSE 473: Ar+ficial Intelligence Markov Models - II Daniel S. Weld - - - University of Washington [Most slides were created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All CS188
CSE 473: Ar+ficial Intelligence Markov Models - II Daniel S. Weld - - - University of Washington [Most slides were created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All CS188
CS 343: Artificial Intelligence
 CS 343: Artificial Intelligence Particle Filters and Applications of HMMs Prof. Scott Niekum The University of Texas at Austin [These slides based on those of Dan Klein and Pieter Abbeel for CS188 Intro
CS 343: Artificial Intelligence Particle Filters and Applications of HMMs Prof. Scott Niekum The University of Texas at Austin [These slides based on those of Dan Klein and Pieter Abbeel for CS188 Intro
CS 188: Artificial Intelligence Fall Recap: Inference Example
 CS 188: Artificial Intelligence Fall 2007 Lecture 19: Decision Diagrams 11/01/2007 Dan Klein UC Berkeley Recap: Inference Example Find P( F=bad) Restrict all factors P() P(F=bad ) P() 0.7 0.3 eather 0.7
CS 188: Artificial Intelligence Fall 2007 Lecture 19: Decision Diagrams 11/01/2007 Dan Klein UC Berkeley Recap: Inference Example Find P( F=bad) Restrict all factors P() P(F=bad ) P() 0.7 0.3 eather 0.7
CS 343: Artificial Intelligence
 CS 343: Artificial Intelligence Particle Filters and Applications of HMMs Prof. Scott Niekum The University of Texas at Austin [These slides based on those of Dan Klein and Pieter Abbeel for CS188 Intro
CS 343: Artificial Intelligence Particle Filters and Applications of HMMs Prof. Scott Niekum The University of Texas at Austin [These slides based on those of Dan Klein and Pieter Abbeel for CS188 Intro
CS 5522: Artificial Intelligence II
 CS 5522: Artificial Intelligence II Particle Filters and Applications of HMMs Instructor: Alan Ritter Ohio State University [These slides were adapted from CS188 Intro to AI at UC Berkeley. All materials
CS 5522: Artificial Intelligence II Particle Filters and Applications of HMMs Instructor: Alan Ritter Ohio State University [These slides were adapted from CS188 Intro to AI at UC Berkeley. All materials
CS 5522: Artificial Intelligence II
 CS 5522: Artificial Intelligence II Particle Filters and Applications of HMMs Instructor: Wei Xu Ohio State University [These slides were adapted from CS188 Intro to AI at UC Berkeley.] Recap: Reasoning
CS 5522: Artificial Intelligence II Particle Filters and Applications of HMMs Instructor: Wei Xu Ohio State University [These slides were adapted from CS188 Intro to AI at UC Berkeley.] Recap: Reasoning
CSE 473: Ar+ficial Intelligence. Example. Par+cle Filters for HMMs. An HMM is defined by: Ini+al distribu+on: Transi+ons: Emissions:
 CSE 473: Ar+ficial Intelligence Par+cle Filters for HMMs Daniel S. Weld - - - University of Washington [Most slides were created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All
CSE 473: Ar+ficial Intelligence Par+cle Filters for HMMs Daniel S. Weld - - - University of Washington [Most slides were created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All
Mini-project 2 (really) due today! Turn in a printout of your work at the end of the class
 due today! Turn in a printout of your work at the end of the class") Administrivia Mini-project 2 (really) due today Turn in a printout of your work at the end of the class Project presentations April 23 (Thursday next week) and 28 (Tuesday the week after) Order will be
Administrivia Mini-project 2 (really) due today Turn in a printout of your work at the end of the class Project presentations April 23 (Thursday next week) and 28 (Tuesday the week after) Order will be
Markov Models and Hidden Markov Models
 Markov Models and Hidden Markov Models Robert Platt Northeastern University Some images and slides are used from: 1. CS188 UC Berkeley 2. RN, AIMA Markov Models We have already seen that an MDP provides
Markov Models and Hidden Markov Models Robert Platt Northeastern University Some images and slides are used from: 1. CS188 UC Berkeley 2. RN, AIMA Markov Models We have already seen that an MDP provides
CS 188: Artificial Intelligence
 CS 188: Artificial Intelligence Markov Models Instructors: Dan Klein and Pieter Abbeel --- University of California, Berkeley [These slides were created by Dan Klein and Pieter Abbeel for CS188 Intro to
CS 188: Artificial Intelligence Markov Models Instructors: Dan Klein and Pieter Abbeel --- University of California, Berkeley [These slides were created by Dan Klein and Pieter Abbeel for CS188 Intro to
CS 5522: Artificial Intelligence II
 CS 5522: Artificial Intelligence II Markov Models Instructor: Alan Ritter Ohio State University [These slides were adapted from CS188 Intro to AI at UC Berkeley. All materials available at http://ai.berkeley.edu.]
CS 5522: Artificial Intelligence II Markov Models Instructor: Alan Ritter Ohio State University [These slides were adapted from CS188 Intro to AI at UC Berkeley. All materials available at http://ai.berkeley.edu.]
CSE 473: Artificial Intelligence Probability Review à Markov Models. Outline
 CSE 473: Artificial Intelligence Probability Review à Markov Models Daniel Weld University of Washington [These slides were created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley.
CSE 473: Artificial Intelligence Probability Review à Markov Models Daniel Weld University of Washington [These slides were created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley.
CSE 473: Artificial Intelligence
 CSE 473: Artificial Intelligence Probability Steve Tanimoto University of Washington [These slides were created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All CS188 materials
CSE 473: Artificial Intelligence Probability Steve Tanimoto University of Washington [These slides were created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All CS188 materials
CS 188: Artificial Intelligence. Our Status in CS188
 CS 188: Artificial Intelligence Probability Pieter Abbeel UC Berkeley Many slides adapted from Dan Klein. 1 Our Status in CS188 We re done with Part I Search and Planning! Part II: Probabilistic Reasoning
CS 188: Artificial Intelligence Probability Pieter Abbeel UC Berkeley Many slides adapted from Dan Klein. 1 Our Status in CS188 We re done with Part I Search and Planning! Part II: Probabilistic Reasoning
CS188 Outline. We re done with Part I: Search and Planning! Part II: Probabilistic Reasoning. Part III: Machine Learning
 CS188 Outline We re done with Part I: Search and Planning! Part II: Probabilistic Reasoning Diagnosis Speech recognition Tracking objects Robot mapping Genetics Error correcting codes lots more! Part III:
CS188 Outline We re done with Part I: Search and Planning! Part II: Probabilistic Reasoning Diagnosis Speech recognition Tracking objects Robot mapping Genetics Error correcting codes lots more! Part III:
CS 188: Artificial Intelligence Spring Announcements
 CS 188: Artificial Intelligence Spring 2011 Lecture 12: Probability 3/2/2011 Pieter Abbeel UC Berkeley Many slides adapted from Dan Klein. 1 Announcements P3 due on Monday (3/7) at 4:59pm W3 going out
CS 188: Artificial Intelligence Spring 2011 Lecture 12: Probability 3/2/2011 Pieter Abbeel UC Berkeley Many slides adapted from Dan Klein. 1 Announcements P3 due on Monday (3/7) at 4:59pm W3 going out
Introduction to Artificial Intelligence (AI)
") Introduction to Artificial Intelligence (AI) Computer Science cpsc502, Lecture 9 Oct, 11, 2011 Slide credit Approx. Inference : S. Thrun, P, Norvig, D. Klein CPSC 502, Lecture 9 Slide 1 Today Oct 11 Bayesian
Introduction to Artificial Intelligence (AI) Computer Science cpsc502, Lecture 9 Oct, 11, 2011 Slide credit Approx. Inference : S. Thrun, P, Norvig, D. Klein CPSC 502, Lecture 9 Slide 1 Today Oct 11 Bayesian
CS188 Outline. CS 188: Artificial Intelligence. Today. Inference in Ghostbusters. Probability. We re done with Part I: Search and Planning!
 CS188 Outline We re done with art I: Search and lanning! CS 188: Artificial Intelligence robability art II: robabilistic Reasoning Diagnosis Speech recognition Tracking objects Robot mapping Genetics Error
CS188 Outline We re done with art I: Search and lanning! CS 188: Artificial Intelligence robability art II: robabilistic Reasoning Diagnosis Speech recognition Tracking objects Robot mapping Genetics Error
CSE 473: Ar+ficial Intelligence. Hidden Markov Models. Bayes Nets. Two random variable at each +me step Hidden state, X i Observa+on, E i
 CSE 473: Ar+ficial Intelligence Bayes Nets Daniel Weld [Most slides were created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All CS188 materials are available at hnp://ai.berkeley.edu.]
CSE 473: Ar+ficial Intelligence Bayes Nets Daniel Weld [Most slides were created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All CS188 materials are available at hnp://ai.berkeley.edu.]
CS 188: Artificial Intelligence Fall 2011
 CS 188: Artificial Intelligence Fall 2011 Lecture 20: HMMs / Speech / ML 11/8/2011 Dan Klein UC Berkeley Today HMMs Demo bonanza! Most likely explanation queries Speech recognition A massive HMM! Details
CS 188: Artificial Intelligence Fall 2011 Lecture 20: HMMs / Speech / ML 11/8/2011 Dan Klein UC Berkeley Today HMMs Demo bonanza! Most likely explanation queries Speech recognition A massive HMM! Details
Bayesian Networks BY: MOHAMAD ALSABBAGH
 Bayesian Networks BY: MOHAMAD ALSABBAGH Outlines Introduction Bayes Rule Bayesian Networks (BN) Representation Size of a Bayesian Network Inference via BN BN Learning Dynamic BN Introduction Conditional
Bayesian Networks BY: MOHAMAD ALSABBAGH Outlines Introduction Bayes Rule Bayesian Networks (BN) Representation Size of a Bayesian Network Inference via BN BN Learning Dynamic BN Introduction Conditional
Our Status. We re done with Part I Search and Planning!
 Probability [These slides were created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All CS188 materials are available at http://ai.berkeley.edu.] Our Status We re done with Part
Probability [These slides were created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All CS188 materials are available at http://ai.berkeley.edu.] Our Status We re done with Part
CSE 473: Artificial Intelligence Autumn 2011
 CSE 473: Artificial Intelligence Autumn 2011 Bayesian Networks Luke Zettlemoyer Many slides over the course adapted from either Dan Klein, Stuart Russell or Andrew Moore 1 Outline Probabilistic models
CSE 473: Artificial Intelligence Autumn 2011 Bayesian Networks Luke Zettlemoyer Many slides over the course adapted from either Dan Klein, Stuart Russell or Andrew Moore 1 Outline Probabilistic models
CSEP 573: Artificial Intelligence
 CSEP 573: Artificial Intelligence Bayesian Networks: Inference Ali Farhadi Many slides over the course adapted from either Luke Zettlemoyer, Pieter Abbeel, Dan Klein, Stuart Russell or Andrew Moore 1 Outline
CSEP 573: Artificial Intelligence Bayesian Networks: Inference Ali Farhadi Many slides over the course adapted from either Luke Zettlemoyer, Pieter Abbeel, Dan Klein, Stuart Russell or Andrew Moore 1 Outline
Hidden Markov Models. AIMA Chapter 15, Sections 1 5. AIMA Chapter 15, Sections 1 5 1
 Hidden Markov Models AIMA Chapter 15, Sections 1 5 AIMA Chapter 15, Sections 1 5 1 Consider a target tracking problem Time and uncertainty X t = set of unobservable state variables at time t e.g., Position
Hidden Markov Models AIMA Chapter 15, Sections 1 5 AIMA Chapter 15, Sections 1 5 1 Consider a target tracking problem Time and uncertainty X t = set of unobservable state variables at time t e.g., Position
Our Status in CSE 5522
 Our Status in CSE 5522 We re done with Part I Search and Planning! Part II: Probabilistic Reasoning Diagnosis Speech recognition Tracking objects Robot mapping Genetics Error correcting codes lots more!
Our Status in CSE 5522 We re done with Part I Search and Planning! Part II: Probabilistic Reasoning Diagnosis Speech recognition Tracking objects Robot mapping Genetics Error correcting codes lots more!
CS 343: Artificial Intelligence
 CS 343: Artificial Intelligence Probability Prof. Scott Niekum The University of Texas at Austin [These slides based on those of Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All CS188
CS 343: Artificial Intelligence Probability Prof. Scott Niekum The University of Texas at Austin [These slides based on those of Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All CS188
CS 188: Artificial Intelligence Fall 2011
 CS 188: Artificial Intelligence Fall 2011 Lecture 12: Probability 10/4/2011 Dan Klein UC Berkeley 1 Today Probability Random Variables Joint and Marginal Distributions Conditional Distribution Product
CS 188: Artificial Intelligence Fall 2011 Lecture 12: Probability 10/4/2011 Dan Klein UC Berkeley 1 Today Probability Random Variables Joint and Marginal Distributions Conditional Distribution Product
Bayes Nets III: Inference
 1 Hal Daumé III (me@hal3.name) Bayes Nets III: Inference Hal Daumé III Computer Science University of Maryland me@hal3.name CS 421: Introduction to Artificial Intelligence 10 Apr 2012 Many slides courtesy
1 Hal Daumé III (me@hal3.name) Bayes Nets III: Inference Hal Daumé III Computer Science University of Maryland me@hal3.name CS 421: Introduction to Artificial Intelligence 10 Apr 2012 Many slides courtesy
CS 188: Artificial Intelligence Spring Announcements
 CS 188: Artificial Intelligence Spring 2011 Lecture 14: Bayes Nets II Independence 3/9/2011 Pieter Abbeel UC Berkeley Many slides over the course adapted from Dan Klein, Stuart Russell, Andrew Moore Announcements
CS 188: Artificial Intelligence Spring 2011 Lecture 14: Bayes Nets II Independence 3/9/2011 Pieter Abbeel UC Berkeley Many slides over the course adapted from Dan Klein, Stuart Russell, Andrew Moore Announcements
Hidden Markov models 1
 Hidden Markov models 1 Outline Time and uncertainty Markov process Hidden Markov models Inference: filtering, prediction, smoothing Most likely explanation: Viterbi 2 Time and uncertainty The world changes;
Hidden Markov models 1 Outline Time and uncertainty Markov process Hidden Markov models Inference: filtering, prediction, smoothing Most likely explanation: Viterbi 2 Time and uncertainty The world changes;
Bayesian Networks. Vibhav Gogate The University of Texas at Dallas
 Bayesian Networks Vibhav Gogate The University of Texas at Dallas Intro to AI (CS 4365) Many slides over the course adapted from either Dan Klein, Luke Zettlemoyer, Stuart Russell or Andrew Moore 1 Outline
Bayesian Networks Vibhav Gogate The University of Texas at Dallas Intro to AI (CS 4365) Many slides over the course adapted from either Dan Klein, Luke Zettlemoyer, Stuart Russell or Andrew Moore 1 Outline
CS 188: Artificial Intelligence Fall 2009
 CS 188: Artificial Intelligence Fall 2009 Lecture 13: Probability 10/8/2009 Dan Klein UC Berkeley 1 Announcements Upcoming P3 Due 10/12 W2 Due 10/15 Midterm in evening of 10/22 Review sessions: Probability
CS 188: Artificial Intelligence Fall 2009 Lecture 13: Probability 10/8/2009 Dan Klein UC Berkeley 1 Announcements Upcoming P3 Due 10/12 W2 Due 10/15 Midterm in evening of 10/22 Review sessions: Probability
Markov localization uses an explicit, discrete representation for the probability of all position in the state space.
 Markov Kalman Filter Localization Markov localization localization starting from any unknown position recovers from ambiguous situation. However, to update the probability of all positions within the whole
Markov Kalman Filter Localization Markov localization localization starting from any unknown position recovers from ambiguous situation. However, to update the probability of all positions within the whole
Bayesian Networks. Vibhav Gogate The University of Texas at Dallas
 Bayesian Networks Vibhav Gogate The University of Texas at Dallas Intro to AI (CS 6364) Many slides over the course adapted from either Dan Klein, Luke Zettlemoyer, Stuart Russell or Andrew Moore 1 Outline
Bayesian Networks Vibhav Gogate The University of Texas at Dallas Intro to AI (CS 6364) Many slides over the course adapted from either Dan Klein, Luke Zettlemoyer, Stuart Russell or Andrew Moore 1 Outline
CSCI 360 Introduc/on to Ar/ficial Intelligence Week 2: Problem Solving and Op/miza/on. Professor Wei-Min Shen Week 8.1 and 8.2
 CSCI 360 Introduc/on to Ar/ficial Intelligence Week 2: Problem Solving and Op/miza/on Professor Wei-Min Shen Week 8.1 and 8.2 Status Check Projects Project 2 Midterm is coming, please do your homework!
CSCI 360 Introduc/on to Ar/ficial Intelligence Week 2: Problem Solving and Op/miza/on Professor Wei-Min Shen Week 8.1 and 8.2 Status Check Projects Project 2 Midterm is coming, please do your homework!
Announcements. Inference. Mid-term. Inference by Enumeration. Reminder: Alarm Network. Introduction to Artificial Intelligence. V22.
 Introduction to Artificial Intelligence V22.0472-001 Fall 2009 Lecture 15: Bayes Nets 3 Midterms graded Assignment 2 graded Announcements Rob Fergus Dept of Computer Science, Courant Institute, NYU Slides
Introduction to Artificial Intelligence V22.0472-001 Fall 2009 Lecture 15: Bayes Nets 3 Midterms graded Assignment 2 graded Announcements Rob Fergus Dept of Computer Science, Courant Institute, NYU Slides
Introduction to Artificial Intelligence (AI)
") Introduction to Artificial Intelligence (AI) Computer Science cpsc502, Lecture 10 Oct, 13, 2011 CPSC 502, Lecture 10 Slide 1 Today Oct 13 Inference in HMMs More on Robot Localization CPSC 502, Lecture
Introduction to Artificial Intelligence (AI) Computer Science cpsc502, Lecture 10 Oct, 13, 2011 CPSC 502, Lecture 10 Slide 1 Today Oct 13 Inference in HMMs More on Robot Localization CPSC 502, Lecture
CS 343: Artificial Intelligence
 CS 343: Artificial Intelligence Bayes Nets: Sampling Prof. Scott Niekum The University of Texas at Austin [These slides based on those of Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley.
CS 343: Artificial Intelligence Bayes Nets: Sampling Prof. Scott Niekum The University of Texas at Austin [These slides based on those of Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley.
Forward algorithm vs. particle filtering
 Particle Filtering ØSometimes X is too big to use exact inference X may be too big to even store B(X) E.g. X is continuous X 2 may be too big to do updates ØSolution: approximate inference Track samples
Particle Filtering ØSometimes X is too big to use exact inference X may be too big to even store B(X) E.g. X is continuous X 2 may be too big to do updates ØSolution: approximate inference Track samples
CS 188: Artificial Intelligence. Bayes Nets
 CS 188: Artificial Intelligence Probabilistic Inference: Enumeration, Variable Elimination, Sampling Pieter Abbeel UC Berkeley Many slides over this course adapted from Dan Klein, Stuart Russell, Andrew
CS 188: Artificial Intelligence Probabilistic Inference: Enumeration, Variable Elimination, Sampling Pieter Abbeel UC Berkeley Many slides over this course adapted from Dan Klein, Stuart Russell, Andrew
Hidden Markov Models (recap BNs)
") Probabilistic reasoning over time - Hidden Markov Models (recap BNs) Applied artificial intelligence (EDA132) Lecture 10 2016-02-17 Elin A. Topp Material based on course book, chapter 15 1 A robot s view
Probabilistic reasoning over time - Hidden Markov Models (recap BNs) Applied artificial intelligence (EDA132) Lecture 10 2016-02-17 Elin A. Topp Material based on course book, chapter 15 1 A robot s view
CS532, Winter 2010 Hidden Markov Models
 CS532, Winter 2010 Hidden Markov Models Dr. Alan Fern, afern@eecs.oregonstate.edu March 8, 2010 1 Hidden Markov Models The world is dynamic and evolves over time. An intelligent agent in such a world needs
CS532, Winter 2010 Hidden Markov Models Dr. Alan Fern, afern@eecs.oregonstate.edu March 8, 2010 1 Hidden Markov Models The world is dynamic and evolves over time. An intelligent agent in such a world needs
CS 188: Artificial Intelligence Fall 2009
 CS 188: Artificial Intelligence Fall 2009 Lecture 14: Bayes Nets 10/13/2009 Dan Klein UC Berkeley Announcements Assignments P3 due yesterday W2 due Thursday W1 returned in front (after lecture) Midterm
CS 188: Artificial Intelligence Fall 2009 Lecture 14: Bayes Nets 10/13/2009 Dan Klein UC Berkeley Announcements Assignments P3 due yesterday W2 due Thursday W1 returned in front (after lecture) Midterm
PROBABILISTIC REASONING OVER TIME
 PROBABILISTIC REASONING OVER TIME In which we try to interpret the present, understand the past, and perhaps predict the future, even when very little is crystal clear. Outline Time and uncertainty Inference:
PROBABILISTIC REASONING OVER TIME In which we try to interpret the present, understand the past, and perhaps predict the future, even when very little is crystal clear. Outline Time and uncertainty Inference:
CS 188: Artificial Intelligence Spring Announcements
 CS 188: Artificial Intelligence Spring 2011 Lecture 16: Bayes Nets IV Inference 3/28/2011 Pieter Abbeel UC Berkeley Many slides over this course adapted from Dan Klein, Stuart Russell, Andrew Moore Announcements
CS 188: Artificial Intelligence Spring 2011 Lecture 16: Bayes Nets IV Inference 3/28/2011 Pieter Abbeel UC Berkeley Many slides over this course adapted from Dan Klein, Stuart Russell, Andrew Moore Announcements
Outline. CSE 573: Artificial Intelligence Autumn Bayes Nets: Big Picture. Bayes Net Semantics. Hidden Markov Models. Example Bayes Net: Car
 CSE 573: Artificial Intelligence Autumn 2012 Bayesian Networks Dan Weld Many slides adapted from Dan Klein, Stuart Russell, Andrew Moore & Luke Zettlemoyer Outline Probabilistic models (and inference)
CSE 573: Artificial Intelligence Autumn 2012 Bayesian Networks Dan Weld Many slides adapted from Dan Klein, Stuart Russell, Andrew Moore & Luke Zettlemoyer Outline Probabilistic models (and inference)
Today s Outline. Recap: MDPs. Bellman Equations. Q-Value Iteration. Bellman Backup 5/7/2012. CSE 473: Artificial Intelligence Reinforcement Learning
 CSE 473: Artificial Intelligence Reinforcement Learning Dan Weld Today s Outline Reinforcement Learning Q-value iteration Q-learning Exploration / exploitation Linear function approximation Many slides
CSE 473: Artificial Intelligence Reinforcement Learning Dan Weld Today s Outline Reinforcement Learning Q-value iteration Q-learning Exploration / exploitation Linear function approximation Many slides
Announcements. CS 188: Artificial Intelligence Fall Causality? Example: Traffic. Topology Limits Distributions. Example: Reverse Traffic
 CS 188: Artificial Intelligence Fall 2008 Lecture 16: Bayes Nets III 10/23/2008 Announcements Midterms graded, up on glookup, back Tuesday W4 also graded, back in sections / box Past homeworks in return
CS 188: Artificial Intelligence Fall 2008 Lecture 16: Bayes Nets III 10/23/2008 Announcements Midterms graded, up on glookup, back Tuesday W4 also graded, back in sections / box Past homeworks in return
Bayes Nets: Sampling
 Bayes Nets: Sampling [These slides were created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All CS188 materials are available at http://ai.berkeley.edu.] Approximate Inference:
Bayes Nets: Sampling [These slides were created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All CS188 materials are available at http://ai.berkeley.edu.] Approximate Inference:
Final Exam December 12, 2017
 Introduction to Artificial Intelligence CSE 473, Autumn 2017 Dieter Fox Final Exam December 12, 2017 Directions This exam has 7 problems with 111 points shown in the table below, and you have 110 minutes
Introduction to Artificial Intelligence CSE 473, Autumn 2017 Dieter Fox Final Exam December 12, 2017 Directions This exam has 7 problems with 111 points shown in the table below, and you have 110 minutes
Probabilistic Models
 Bayes Nets 1 Probabilistic Models Models describe how (a portion of) the world works Models are always simplifications May not account for every variable May not account for all interactions between variables
Bayes Nets 1 Probabilistic Models Models describe how (a portion of) the world works Models are always simplifications May not account for every variable May not account for all interactions between variables
Reinforcement Learning Wrap-up
 Reinforcement Learning Wrap-up Slides courtesy of Dan Klein and Pieter Abbeel University of California, Berkeley [These slides were created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley.
Reinforcement Learning Wrap-up Slides courtesy of Dan Klein and Pieter Abbeel University of California, Berkeley [These slides were created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley.
Probability Hal Daumé III. Computer Science University of Maryland CS 421: Introduction to Artificial Intelligence 27 Mar 2012
 1 Hal Daumé III (me@hal3.name) Probability 101++ Hal Daumé III Computer Science University of Maryland me@hal3.name CS 421: Introduction to Artificial Intelligence 27 Mar 2012 Many slides courtesy of Dan
1 Hal Daumé III (me@hal3.name) Probability 101++ Hal Daumé III Computer Science University of Maryland me@hal3.name CS 421: Introduction to Artificial Intelligence 27 Mar 2012 Many slides courtesy of Dan
Human-Oriented Robotics. Temporal Reasoning. Kai Arras Social Robotics Lab, University of Freiburg
 Temporal Reasoning Kai Arras, University of Freiburg 1 Temporal Reasoning Contents Introduction Temporal Reasoning Hidden Markov Models Linear Dynamical Systems (LDS) Kalman Filter 2 Temporal Reasoning
Temporal Reasoning Kai Arras, University of Freiburg 1 Temporal Reasoning Contents Introduction Temporal Reasoning Hidden Markov Models Linear Dynamical Systems (LDS) Kalman Filter 2 Temporal Reasoning
CSE 473: Artificial Intelligence Spring 2014
 CSE 473: Artificial Intelligence Spring 2014 Hanna Hajishirzi Problem Spaces and Search slides from Dan Klein, Stuart Russell, Andrew Moore, Dan Weld, Pieter Abbeel, Luke Zettelmoyer Outline Agents that
CSE 473: Artificial Intelligence Spring 2014 Hanna Hajishirzi Problem Spaces and Search slides from Dan Klein, Stuart Russell, Andrew Moore, Dan Weld, Pieter Abbeel, Luke Zettelmoyer Outline Agents that
Final Exam December 12, 2017
 Introduction to Artificial Intelligence CSE 473, Autumn 2017 Dieter Fox Final Exam December 12, 2017 Directions This exam has 7 problems with 111 points shown in the table below, and you have 110 minutes
Introduction to Artificial Intelligence CSE 473, Autumn 2017 Dieter Fox Final Exam December 12, 2017 Directions This exam has 7 problems with 111 points shown in the table below, and you have 110 minutes
CSE 473: Artificial Intelligence Autumn Topics
 CSE 473: Artificial Intelligence Autumn 2014 Bayesian Networks Learning II Dan Weld Slides adapted from Jack Breese, Dan Klein, Daphne Koller, Stuart Russell, Andrew Moore & Luke Zettlemoyer 1 473 Topics
CSE 473: Artificial Intelligence Autumn 2014 Bayesian Networks Learning II Dan Weld Slides adapted from Jack Breese, Dan Klein, Daphne Koller, Stuart Russell, Andrew Moore & Luke Zettlemoyer 1 473 Topics
CS325 Artificial Intelligence Ch. 15,20 Hidden Markov Models and Particle Filtering
 CS325 Artificial Intelligence Ch. 15,20 Hidden Markov Models and Particle Filtering Cengiz Günay, Emory Univ. Günay Ch. 15,20 Hidden Markov Models and Particle FilteringSpring 2013 1 / 21 Get Rich Fast!
CS325 Artificial Intelligence Ch. 15,20 Hidden Markov Models and Particle Filtering Cengiz Günay, Emory Univ. Günay Ch. 15,20 Hidden Markov Models and Particle FilteringSpring 2013 1 / 21 Get Rich Fast!
Outline. CSE 473: Artificial Intelligence Spring Bayes Nets: Big Picture. Bayes Net Semantics. Hidden Markov Models. Example Bayes Net: Car
 CSE 473: rtificial Intelligence Spring 2012 ayesian Networks Dan Weld Outline Probabilistic models (and inference) ayesian Networks (Ns) Independence in Ns Efficient Inference in Ns Learning Many slides
CSE 473: rtificial Intelligence Spring 2012 ayesian Networks Dan Weld Outline Probabilistic models (and inference) ayesian Networks (Ns) Independence in Ns Efficient Inference in Ns Learning Many slides
Artificial Intelligence
 Artificial Intelligence Roman Barták Department of Theoretical Computer Science and Mathematical Logic Summary of last lecture We know how to do probabilistic reasoning over time transition model P(X t
Artificial Intelligence Roman Barták Department of Theoretical Computer Science and Mathematical Logic Summary of last lecture We know how to do probabilistic reasoning over time transition model P(X t
Probability and Time: Hidden Markov Models (HMMs)
") Probability and Time: Hidden Markov Models (HMMs) Computer Science cpsc322, Lecture 32 (Textbook Chpt 6.5.2) Nov, 25, 2013 CPSC 322, Lecture 32 Slide 1 Lecture Overview Recap Markov Models Markov Chain
Probability and Time: Hidden Markov Models (HMMs) Computer Science cpsc322, Lecture 32 (Textbook Chpt 6.5.2) Nov, 25, 2013 CPSC 322, Lecture 32 Slide 1 Lecture Overview Recap Markov Models Markov Chain
COMS 4771 Probabilistic Reasoning via Graphical Models. Nakul Verma
 COMS 4771 Probabilistic Reasoning via Graphical Models Nakul Verma Last time Dimensionality Reduction Linear vs non-linear Dimensionality Reduction Principal Component Analysis (PCA) Non-linear methods
COMS 4771 Probabilistic Reasoning via Graphical Models Nakul Verma Last time Dimensionality Reduction Linear vs non-linear Dimensionality Reduction Principal Component Analysis (PCA) Non-linear methods
CS 343: Artificial Intelligence
 CS 343: Artificial Intelligence Bayes Nets Prof. Scott Niekum The University of Texas at Austin [These slides based on those of Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All CS188
CS 343: Artificial Intelligence Bayes Nets Prof. Scott Niekum The University of Texas at Austin [These slides based on those of Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All CS188
Linear Dynamical Systems
 Linear Dynamical Systems Sargur N. srihari@cedar.buffalo.edu Machine Learning Course: http://www.cedar.buffalo.edu/~srihari/cse574/index.html Two Models Described by Same Graph Latent variables Observations
Linear Dynamical Systems Sargur N. srihari@cedar.buffalo.edu Machine Learning Course: http://www.cedar.buffalo.edu/~srihari/cse574/index.html Two Models Described by Same Graph Latent variables Observations
Introduction to Mobile Robotics Probabilistic Robotics
 Introduction to Mobile Robotics Probabilistic Robotics Wolfram Burgard 1 Probabilistic Robotics Key idea: Explicit representation of uncertainty (using the calculus of probability theory) Perception Action
Introduction to Mobile Robotics Probabilistic Robotics Wolfram Burgard 1 Probabilistic Robotics Key idea: Explicit representation of uncertainty (using the calculus of probability theory) Perception Action
Reasoning Under Uncertainty Over Time. CS 486/686: Introduction to Artificial Intelligence
 Reasoning Under Uncertainty Over Time CS 486/686: Introduction to Artificial Intelligence 1 Outline Reasoning under uncertainty over time Hidden Markov Models Dynamic Bayes Nets 2 Introduction So far we
Reasoning Under Uncertainty Over Time CS 486/686: Introduction to Artificial Intelligence 1 Outline Reasoning under uncertainty over time Hidden Markov Models Dynamic Bayes Nets 2 Introduction So far we
Machine Learning for Data Science (CS4786) Lecture 19
 Lecture 19") Machine Learning for Data Science (CS4786) Lecture 19 Hidden Markov Models Course Webpage : http://www.cs.cornell.edu/courses/cs4786/2017fa/ Quiz Quiz Two variables can be marginally independent but not
Machine Learning for Data Science (CS4786) Lecture 19 Hidden Markov Models Course Webpage : http://www.cs.cornell.edu/courses/cs4786/2017fa/ Quiz Quiz Two variables can be marginally independent but not
Temporal probability models. Chapter 15
 Temporal probability models Chapter 15 Outline Time and uncertainty Inference: filtering, prediction, smoothing Hidden Markov models Kalman filters (a brief mention) Dynamic Bayesian networks Particle
Temporal probability models Chapter 15 Outline Time and uncertainty Inference: filtering, prediction, smoothing Hidden Markov models Kalman filters (a brief mention) Dynamic Bayesian networks Particle
CS 5522: Artificial Intelligence II
 CS 5522: Artificial Intelligence II Bayes Nets Instructor: Alan Ritter Ohio State University [These slides were adapted from CS188 Intro to AI at UC Berkeley. All materials available at http://ai.berkeley.edu.]
CS 5522: Artificial Intelligence II Bayes Nets Instructor: Alan Ritter Ohio State University [These slides were adapted from CS188 Intro to AI at UC Berkeley. All materials available at http://ai.berkeley.edu.]
Why do we care? Measurements. Handling uncertainty over time: predicting, estimating, recognizing, learning. Dealing with time
 Handling uncertainty over time: predicting, estimating, recognizing, learning Chris Atkeson 2004 Why do we care? Speech recognition makes use of dependence of words and phonemes across time. Knowing where
Handling uncertainty over time: predicting, estimating, recognizing, learning Chris Atkeson 2004 Why do we care? Speech recognition makes use of dependence of words and phonemes across time. Knowing where
The Particle Filter. PD Dr. Rudolph Triebel Computer Vision Group. Machine Learning for Computer Vision
 The Particle Filter Non-parametric implementation of Bayes filter Represents the belief (posterior) random state samples. by a set of This representation is approximate. Can represent distributions that
The Particle Filter Non-parametric implementation of Bayes filter Represents the belief (posterior) random state samples. by a set of This representation is approximate. Can represent distributions that
Probabilistic Robotics
 University of Rome La Sapienza Master in Artificial Intelligence and Robotics Probabilistic Robotics Prof. Giorgio Grisetti Course web site: http://www.dis.uniroma1.it/~grisetti/teaching/probabilistic_ro
University of Rome La Sapienza Master in Artificial Intelligence and Robotics Probabilistic Robotics Prof. Giorgio Grisetti Course web site: http://www.dis.uniroma1.it/~grisetti/teaching/probabilistic_ro
Announcements. CS 188: Artificial Intelligence Spring Probability recap. Outline. Bayes Nets: Big Picture. Graphical Model Notation
 CS 188: Artificial Intelligence Spring 2010 Lecture 15: Bayes Nets II Independence 3/9/2010 Pieter Abbeel UC Berkeley Many slides over the course adapted from Dan Klein, Stuart Russell, Andrew Moore Current
CS 188: Artificial Intelligence Spring 2010 Lecture 15: Bayes Nets II Independence 3/9/2010 Pieter Abbeel UC Berkeley Many slides over the course adapted from Dan Klein, Stuart Russell, Andrew Moore Current
Bayes Net Representation. CS 188: Artificial Intelligence. Approximate Inference: Sampling. Variable Elimination. Sampling.
 188: Artificial Intelligence Bayes Nets: ampling Bayes Net epresentation A directed, acyclic graph, one node per random variable A conditional probability table (PT) for each node A collection of distributions
188: Artificial Intelligence Bayes Nets: ampling Bayes Net epresentation A directed, acyclic graph, one node per random variable A conditional probability table (PT) for each node A collection of distributions
CS 188: Artificial Intelligence Fall Announcements
 CS 188: Artificil Intelligence Fll 2009 Lecture 20: Prticle Filtering 11/5/2009 Dn Klein UC Berkeley Announcements Written 3 out: due 10/12 Project 4 out: due 10/19 Written 4 proly xed, Project 5 moving
CS 188: Artificil Intelligence Fll 2009 Lecture 20: Prticle Filtering 11/5/2009 Dn Klein UC Berkeley Announcements Written 3 out: due 10/12 Project 4 out: due 10/19 Written 4 proly xed, Project 5 moving
Hidden Markov Models. George Konidaris
 Hidden Markov Models George Konidaris gdk@cs.brown.edu Fall 2018 Recall: Bayesian Network Flu Allergy Sinus Nose Headache Recall: BN Flu Allergy Flu P True 0.6 False 0.4 Sinus Allergy P True 0.2 False
Hidden Markov Models George Konidaris gdk@cs.brown.edu Fall 2018 Recall: Bayesian Network Flu Allergy Sinus Nose Headache Recall: BN Flu Allergy Flu P True 0.6 False 0.4 Sinus Allergy P True 0.2 False
Temporal probability models. Chapter 15, Sections 1 5 1
 Temporal probability models Chapter 15, Sections 1 5 Chapter 15, Sections 1 5 1 Outline Time and uncertainty Inference: filtering, prediction, smoothing Hidden Markov models Kalman filters (a brief mention)
Temporal probability models Chapter 15, Sections 1 5 Chapter 15, Sections 1 5 1 Outline Time and uncertainty Inference: filtering, prediction, smoothing Hidden Markov models Kalman filters (a brief mention)
Probabilistic Robotics
 Probabilistic Robotics Overview of probability, Representing uncertainty Propagation of uncertainty, Bayes Rule Application to Localization and Mapping Slides from Autonomous Robots (Siegwart and Nourbaksh),
Probabilistic Robotics Overview of probability, Representing uncertainty Propagation of uncertainty, Bayes Rule Application to Localization and Mapping Slides from Autonomous Robots (Siegwart and Nourbaksh),
Hidden Markov Models,99,100! Markov, here I come!
 Hidden Markov Models,99,100! Markov, here I come! 16.410/413 Principles of Autonomy and Decision-Making Pedro Santana (psantana@mit.edu) October 7 th, 2015. Based on material by Brian Williams and Emilio
Hidden Markov Models,99,100! Markov, here I come! 16.410/413 Principles of Autonomy and Decision-Making Pedro Santana (psantana@mit.edu) October 7 th, 2015. Based on material by Brian Williams and Emilio
Extensions of Bayesian Networks. Outline. Bayesian Network. Reasoning under Uncertainty. Features of Bayesian Networks.
 Extensions of Bayesian Networks Outline Ethan Howe, James Lenfestey, Tom Temple Intro to Dynamic Bayesian Nets (Tom Exact inference in DBNs with demo (Ethan Approximate inference and learning (Tom Probabilistic
Extensions of Bayesian Networks Outline Ethan Howe, James Lenfestey, Tom Temple Intro to Dynamic Bayesian Nets (Tom Exact inference in DBNs with demo (Ethan Approximate inference and learning (Tom Probabilistic
LEARNING DYNAMIC SYSTEMS: MARKOV MODELS
 LEARNING DYNAMIC SYSTEMS: MARKOV MODELS Markov Process and Markov Chains Hidden Markov Models Kalman Filters Types of dynamic systems Problem of future state prediction Predictability Observability Easily
LEARNING DYNAMIC SYSTEMS: MARKOV MODELS Markov Process and Markov Chains Hidden Markov Models Kalman Filters Types of dynamic systems Problem of future state prediction Predictability Observability Easily