L11. EKF SLAM: PART I. NA568 Mobile Robotics: Methods & Algorithms
|
|
|
- Corey Banks
- 5 years ago
- Views:
Transcription





1 L11. EKF SLAM: PART I NA568 Mobile Robotics: Methods & Algorithms
2 Today s Topic EKF Feature-Based SLAM State Representation Process / Observation Models Landmark Initialization Robot-Landmark Correlation

3 The SLAM Problem 3 A robot is exploring an unknown, static environment. Given: The robot s controls Observations of nearby features Estimate: Map of features Path of the robot


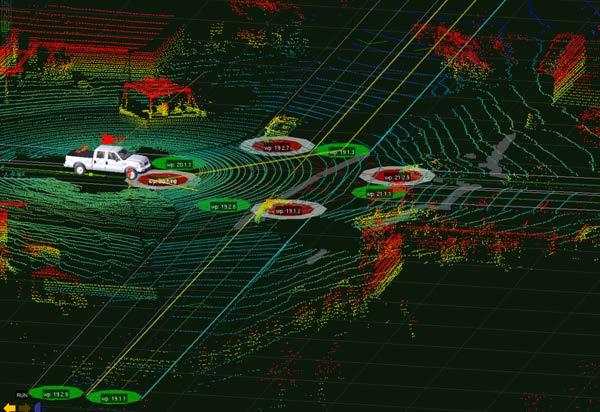
4 SLAM Applications 4 Indoors Undersea Space Underground






5 Representations 5 Grid maps or scans [Lu & Milios, 97; Gutmann, 98: Thrun 98; Burgard, 99; Konolige & Gutmann, 00; Thrun, 00; Arras, 99; Haehnel, 01; ] Landmark-based [Leonard et al., 98; Castelanos et al., 99: Dissanayake et al., 2001; Montemerlo et al., 2002;
6 Illustration of SLAM without Landmarks With only dead reckoning, vehicle pose uncertainty grows without bound Courtesy J. Leonard
7 Illustration of SLAM without Landmarks With only dead reckoning, vehicle pose uncertainty grows without bound Courtesy J. Leonard
8 Illustration of SLAM without Landmarks With only dead reckoning, vehicle pose uncertainty grows without bound Courtesy J. Leonard
9 Illustration of SLAM without Landmarks With only dead reckoning, vehicle pose uncertainty grows without bound Courtesy J. Leonard
10 Illustration of SLAM without Landmarks With only dead reckoning, vehicle pose uncertainty grows without bound Courtesy J. Leonard
11 Illustration of SLAM without Landmarks With only dead reckoning, vehicle pose uncertainty grows without bound Courtesy J. Leonard
12 Repeat, with Measurements of Landmarks First position: two features observed Courtesy J. Leonard
13 Illustration of SLAM with Landmarks Second position: two new features observed Courtesy J. Leonard
14 Illustration of SLAM with Landmarks Re-observation of first two features results in improved estimates for both vehicle and feature Courtesy J. Leonard
15 Illustration of SLAM with Landmarks Third position: two additional features added to map Courtesy J. Leonard
16 Illustration of SLAM with Landmarks Re-observation of first four features results in improved location estimates for vehicle and all features Courtesy J. Leonard
17 Illustration of SLAM with Landmarks Process continues as the vehicle moves through the environment Courtesy J. Leonard
18 SLAM Using Landmarks MIT Indoor Track Courtesy J. Leonard
 Courtesy J.")
19 Test Environment (Point Landmarks) Courtesy J. Leonard

20 View from Vehicle Courtesy J. Leonard

21 SLAM Using Landmarks 1. Move 2. Sense 3. Associate measurements with known features 4. Update state estimates for robot and previously mapped features 5. Find new features from unassociated measurements 6. Initialize new features 7. Repeat MIT Indoor Track
22 Comparison with Ground Truth odometry SLAM result Courtesy J. Leonard
23 Why is SLAM a hard problem? 23 SLAM: robot path and map are both unknown Robot path error correlates errors in the map
24 Why is SLAM a hard problem? 24 Robot pose uncertainty In the real world, the mapping between observations and landmarks is unknown Picking wrong data associations can have catastrophic consequences EKF SLAM is brittle in this regard Pose error correlates data associations

25 Simultaneous Localization and Mapping (SLAM) Building a map and locating the robot in the map at the same time Chicken-and-egg problem map localize Courtesy: Cyrill Stachniss
26 Definition of the SLAM Problem Given The robot s controls Observations Wanted Map of the environment Trajectory of the robot Courtesy: Cyrill Stachniss
27 Three Main Paradigms Kalman filter Particle filter Graphbased Courtesy: Cyrill Stachniss
28 Bayes Filter Recursive filter with prediction and correction step Prediction Correction Courtesy: Cyrill Stachniss

29 EKF for Online SLAM We consider here the Kalman filter as a solution to the online SLAM problem Courtesy: Thrun, Burgard, Fox
30 Extended Kalman Filter Algorithm Courtesy: Cyrill Stachniss
31 EKF SLAM Application of the EKF to SLAM Estimate robot s pose and locations of landmarks in the environment Assumption: known correspondences State space (for the 2D plane) is Courtesy: Cyrill Stachniss
-dimensional Gaussian Belief is represented by Courtesy:")
32 EKF SLAM: State Representation Map with n landmarks: (3+2n)-dimensional Gaussian Belief is represented by Courtesy: Cyrill Stachniss
33 EKF SLAM: State Representation More compactly Courtesy: Cyrill Stachniss
 Courtesy: Cyrill")
34 EKF SLAM: State Representation Even more compactly (note: ) Courtesy: Cyrill Stachniss
35 EKF SLAM: Filter Cycle 1. State prediction 2. Measurement prediction 3. Measurement 4. Data association 5. Update Courtesy: Cyrill Stachniss
36 EKF SLAM: State Prediction Courtesy: Cyrill Stachniss
37 EKF SLAM: Measurement Prediction Courtesy: Cyrill Stachniss
38 EKF SLAM: Obtained Measurement Courtesy: Cyrill Stachniss
39 EKF SLAM: Data Association and Difference Between h(x) and z Courtesy: Cyrill Stachniss
40 EKF SLAM: Update Step Courtesy: Cyrill Stachniss
41 EKF SLAM: Concrete Example Setup Robot moves in the 2D plane Velocity-based motion model Robot observes point landmarks Range-bearing sensor Known data association Known number of landmarks Courtesy: Cyrill Stachniss
 2n+3 dimensions Courtesy: Cyrill")
42 Initialization Robot starts in its own reference frame (all landmarks unknown) 2n+3 dimensions Courtesy: Cyrill Stachniss
43 Extended Kalman Filter Algorithm Courtesy: Cyrill Stachniss

44 Prediction Step (Motion) Goal: Update state space based on the robot s motion Robot motion in the plane How to map that to the 2n+3 dim space? Courtesy: Cyrill Stachniss

45 Update the State Space From the motion in the plane to the 2n+3 dimensional space Courtesy: Cyrill Stachniss
46 Extended Kalman Filter Algorithm DONE Courtesy: Cyrill Stachniss
47 Update Covariance The function only affects the robot s motion and not the landmarks Jacobian of the motion (3 3) Identity (2n 2n) Courtesy: Cyrill Stachniss
48 Jacobian of the Motion Courtesy: Cyrill Stachniss
49 Jacobian of the Motion Courtesy: Cyrill Stachniss
50 Jacobian of the Motion Courtesy: Cyrill Stachniss
51 Jacobian of the Motion Courtesy: Cyrill Stachniss

52 This Leads to the Time Propagation Apply & DONE Courtesy: Cyrill Stachniss

53 EKF SLAM: Motion Prediction Step Courtesy: Cyrill Stachniss
54 Extended Kalman Filter Algorithm DONE DONE Courtesy: Cyrill Stachniss
55 Extended Kalman Filter Algorithm DONE DONE Courtesy: Cyrill Stachniss
56 EKF SLAM: Correction Step Known data association : i-th measurement at time t observes the landmark with index j Initialize landmark if unobserved Compute the expected observation Compute the Jacobian of Proceed with computing the Kalman gain Courtesy: Cyrill Stachniss


57 Range-Bearing Observation Range-Bearing observation If landmark has not been observed observed location of landmark j estimated robot s location relative measurement Can initialize from a single measurement b/c the observation function is bijective for range/bearing. If using either range or bearing only, would need to accumulate observations over a time window and triangulate to initialize. Courtesy: Cyrill Stachniss

58 Expected Observation Compute expected observation according to the current estimate Courtesy: Cyrill Stachniss

59 Jacobian for the Observation Based on Compute the Jacobian low-dim space Courtesy: Cyrill Stachniss

60 Jacobian for the Observation Based on Compute the Jacobian Courtesy: Cyrill Stachniss
61 The First Component Based on We obtain (by applying the chain rule) Courtesy: Cyrill Stachniss

62 Jacobian for the Observation Based on Compute the Jacobian Courtesy: Cyrill Stachniss

63 Jacobian for the Observation Use the computed Jacobian map it to the high dimensional space Courtesy: Cyrill Stachniss

64 In other words, what that projection matrix F x,j does r w.r.t. robot w.r.t. other landmarks w.r.t. m i w.r.t. other landmarks
65 Next Steps as Specified DONE DONE Courtesy: Cyrill Stachniss
66 Extended Kalman Filter Algorithm DONE DONE Apply & DONE Apply & DONE Apply & DONE Courtesy: Cyrill Stachniss

67 EKF SLAM Correction (1/2) Courtesy: Cyrill Stachniss

68 EKF SLAM Correction (2/2) Courtesy: Cyrill Stachniss

69 EKF-SLAM Stacked (Batch) Update Update K t is a (3+2n) (2k) gain matrix composed of a weighted linear combination of the columns of t associated with R and m i indices Hence, in general, because K t is full, it non-trivially changes all of the elements in t during the covariance update


70 EKF-SLAM Sequential Update for i=1:k Think of this loop as a zero motion prediction + update step endfor Return the updated state
 Not quite when observation models are nonlinear (EKF) Why?")
71 Batch vs Sequential Updates When can we do this? When sensor measurements are independent, i.e. Why? Because of conditional independence Are Batch vs. Sequential Updates Equivalent? Yes when observation models are linear (KF) Not quite when observation models are nonlinear (EKF) Why? because our linearization point for each H t i changes as we perform the updates sequentially
72 Implementation Notes Measurement update in a single step requires only one full belief update Always normalize the angular components You do not need to create the F projection matrices explicitly (e.g., in Matlab), they are shown for illustration of dimensionality. Prediction and update expressions can be more efficiently implemented accounting for the sparsity that exists in the Jacobians. Courtesy: Cyrill Stachniss
73 Done! Courtesy: Cyrill Stachniss
74 Loop-Closing Loop-closing means recognizing an already mapped area Data association under high ambiguity possible environment symmetries Uncertainties collapse after a loop-closure (whether the closure was correct or not) Courtesy: Cyrill Stachniss
75 Before the Loop-Closure Courtesy: K. Arras
76 After the Loop-Closure Courtesy: K. Arras
77 Loop-Closures in SLAM Loop-closing reduces the uncertainty in robot and landmark estimates This can be exploited when exploring an environment for the sake of better (e.g., more accurate) maps Wrong loop-closures lead to filter divergence Courtesy: Cyrill Stachniss

78 EKF SLAM Correlations In the limit, the landmark estimates become fully correlated Courtesy: Dissanayake
79 EKF SLAM Correlations 79 Blue path = true path Red path = estimated path Black path = odometry Approximate the SLAM posterior with a high-dimensional Gaussian [Smith & Cheesman, 1986] Single hypothesis data association Courtesy: M. Montemerlo
80 EKF SLAM Correlations Map Correlation matrix Courtesy: M. Montemerlo

81 EKF SLAM Correlations Map Correlation matrix Courtesy: M. Montemerlo

82 EKF SLAM Correlations Map Correlation matrix Courtesy: M. Montemerlo
83 EKF SLAM Correlations Covariance Matrix in the Linear Gaussian SLAM solution Pros : Enables us to transfer information from one part of the environment to the other parts Prevents overconfidence and divergence Cons : Increases computational complexity Maintain Slow Consistent Cross correlations Ignore Fast Inconsistent
84 EKF SLAM Correlations The correlation between the robot s pose and the landmarks cannot be ignored Assuming independence generates too optimistic estimates of the uncertainty Courtesy: J.M. Castellanos
85 EKF SLAM Uncertainties The determinant of any sub-matrix of the map covariance matrix decreases monotonically New landmarks are initialized with maximum uncertainty Courtesy: Dissanayake
86 EKF SLAM in the Limit In the limit, the covariance associated with any single landmark location estimate is determined only by the initial covariance in the vehicle location estimate. Courtesy: Dissanayake

87 Example: Victoria Park Dataset Courtesy: E. Nebot

88 Victoria Park: Data Acquisition Courtesy: E. Nebot
89 Victoria Park: EKF Estimate Courtesy: E. Nebot
90 Victoria Park: EKF Estimate Courtesy: E. Nebot

91 Victoria Park: Landmarks Courtesy: E. Nebot

92 92 Victoria Park: Landmark Covariance Courtesy: E. Nebot

93 Andrew Davison: MonoSLAM
94 EKF SLAM Complexity Cubic complexity depends only on the measurement dimensionality Cost per step: dominated by the number of landmarks: Memory consumption: The EKF becomes computationally intractable for large maps! Courtesy: Cyrill Stachniss
95 EKF SLAM Summary The first SLAM solution Convergence proof for the linear Gaussian case Can diverge if non-linearities are large (and the reality is non-linear...) Can deal only with a single mode Successful in medium-scale scenes Approximations exists to reduce the computational complexity Courtesy: Cyrill Stachniss
96 EKF SLAM Summary 96 Quadratic in the number of landmarks: O(n 2 ) Convergence results for the linear case. Can diverge if nonlinearities are large! Have been applied successfully in large-scale environments. Approximations reduce the computational complexity.
97 Next Lecture Data Association Incremental Maximum Likelihood (i.e., Nearest Neighbor) Joint Compatibility Branch and Bound
98 Literature EKF SLAM Thrun et al.: Probabilistic Robotics, Chapter 10 Smith, Self, & Cheeseman: Estimating Uncertain Spatial Relationships in Robotics Dissanayake et al.: A Solution to the Simultaneous Localization and Map Building (SLAM) Problem Durrant-Whyte & Bailey: SLAM Part 1 and SLAM Part 2 tutorials Courtesy: Cyrill Stachniss
Introduction to Mobile Robotics SLAM: Simultaneous Localization and Mapping
 Introduction to Mobile Robotics SLAM: Simultaneous Localization and Mapping Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz What is SLAM? Estimate the pose of a robot and the map of the environment
Introduction to Mobile Robotics SLAM: Simultaneous Localization and Mapping Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz What is SLAM? Estimate the pose of a robot and the map of the environment
Particle Filters; Simultaneous Localization and Mapping (Intelligent Autonomous Robotics) Subramanian Ramamoorthy School of Informatics
 Subramanian Ramamoorthy School of Informatics") Particle Filters; Simultaneous Localization and Mapping (Intelligent Autonomous Robotics) Subramanian Ramamoorthy School of Informatics Recap: State Estimation using Kalman Filter Project state and error
Particle Filters; Simultaneous Localization and Mapping (Intelligent Autonomous Robotics) Subramanian Ramamoorthy School of Informatics Recap: State Estimation using Kalman Filter Project state and error
Robotics. Mobile Robotics. Marc Toussaint U Stuttgart
 Robotics Mobile Robotics State estimation, Bayes filter, odometry, particle filter, Kalman filter, SLAM, joint Bayes filter, EKF SLAM, particle SLAM, graph-based SLAM Marc Toussaint U Stuttgart DARPA Grand
Robotics Mobile Robotics State estimation, Bayes filter, odometry, particle filter, Kalman filter, SLAM, joint Bayes filter, EKF SLAM, particle SLAM, graph-based SLAM Marc Toussaint U Stuttgart DARPA Grand
Simultaneous Localization and Mapping
 Simultaneous Localization and Mapping Miroslav Kulich Intelligent and Mobile Robotics Group Czech Institute of Informatics, Robotics and Cybernetics Czech Technical University in Prague Winter semester
Simultaneous Localization and Mapping Miroslav Kulich Intelligent and Mobile Robotics Group Czech Institute of Informatics, Robotics and Cybernetics Czech Technical University in Prague Winter semester
Robotics 2 Data Association. Giorgio Grisetti, Cyrill Stachniss, Kai Arras, Wolfram Burgard
 Robotics 2 Data Association Giorgio Grisetti, Cyrill Stachniss, Kai Arras, Wolfram Burgard Data Association Data association is the process of associating uncertain measurements to known tracks. Problem
Robotics 2 Data Association Giorgio Grisetti, Cyrill Stachniss, Kai Arras, Wolfram Burgard Data Association Data association is the process of associating uncertain measurements to known tracks. Problem
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Probabilistic Fundamentals in Robotics Gaussian Filters Course Outline Basic mathematical framework Probabilistic models of mobile robots Mobile
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Probabilistic Fundamentals in Robotics Gaussian Filters Course Outline Basic mathematical framework Probabilistic models of mobile robots Mobile
Simultaneous Localization and Mapping (SLAM) Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo") Simultaneous Localization and Mapping (SLAM) Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Introduction SLAM asks the following question: Is it possible for an autonomous vehicle
Simultaneous Localization and Mapping (SLAM) Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Introduction SLAM asks the following question: Is it possible for an autonomous vehicle
Robotics 2 Target Tracking. Kai Arras, Cyrill Stachniss, Maren Bennewitz, Wolfram Burgard
 Robotics 2 Target Tracking Kai Arras, Cyrill Stachniss, Maren Bennewitz, Wolfram Burgard Slides by Kai Arras, Gian Diego Tipaldi, v.1.1, Jan 2012 Chapter Contents Target Tracking Overview Applications
Robotics 2 Target Tracking Kai Arras, Cyrill Stachniss, Maren Bennewitz, Wolfram Burgard Slides by Kai Arras, Gian Diego Tipaldi, v.1.1, Jan 2012 Chapter Contents Target Tracking Overview Applications
Using the Kalman Filter for SLAM AIMS 2015
 Using the Kalman Filter for SLAM AIMS 2015 Contents Trivial Kinematics Rapid sweep over localisation and mapping (components of SLAM) Basic EKF Feature Based SLAM Feature types and representations Implementation
Using the Kalman Filter for SLAM AIMS 2015 Contents Trivial Kinematics Rapid sweep over localisation and mapping (components of SLAM) Basic EKF Feature Based SLAM Feature types and representations Implementation
EKF and SLAM. McGill COMP 765 Sept 18 th, 2017
 EKF and SLAM McGill COMP 765 Sept 18 th, 2017 Outline News and information Instructions for paper presentations Continue on Kalman filter: EKF and extension to mapping Example of a real mapping system:
EKF and SLAM McGill COMP 765 Sept 18 th, 2017 Outline News and information Instructions for paper presentations Continue on Kalman filter: EKF and extension to mapping Example of a real mapping system:
Probabilistic Fundamentals in Robotics. DAUIN Politecnico di Torino July 2010
 Probabilistic Fundamentals in Robotics Gaussian Filters Basilio Bona DAUIN Politecnico di Torino July 2010 Course Outline Basic mathematical framework Probabilistic models of mobile robots Mobile robot
Probabilistic Fundamentals in Robotics Gaussian Filters Basilio Bona DAUIN Politecnico di Torino July 2010 Course Outline Basic mathematical framework Probabilistic models of mobile robots Mobile robot
Mobile Robot Localization
 Mobile Robot Localization 1 The Problem of Robot Localization Given a map of the environment, how can a robot determine its pose (planar coordinates + orientation)? Two sources of uncertainty: - observations
Mobile Robot Localization 1 The Problem of Robot Localization Given a map of the environment, how can a robot determine its pose (planar coordinates + orientation)? Two sources of uncertainty: - observations
Mobile Robot Localization
 Mobile Robot Localization 1 The Problem of Robot Localization Given a map of the environment, how can a robot determine its pose (planar coordinates + orientation)? Two sources of uncertainty: - observations
Mobile Robot Localization 1 The Problem of Robot Localization Given a map of the environment, how can a robot determine its pose (planar coordinates + orientation)? Two sources of uncertainty: - observations
Exact State and Covariance Sub-matrix Recovery for Submap Based Sparse EIF SLAM Algorithm
 8 IEEE International Conference on Robotics and Automation Pasadena, CA, USA, May 19-3, 8 Exact State and Covariance Sub-matrix Recovery for Submap Based Sparse EIF SLAM Algorithm Shoudong Huang, Zhan
8 IEEE International Conference on Robotics and Automation Pasadena, CA, USA, May 19-3, 8 Exact State and Covariance Sub-matrix Recovery for Submap Based Sparse EIF SLAM Algorithm Shoudong Huang, Zhan
Robot Mapping. Least Squares. Cyrill Stachniss
 Robot Mapping Least Squares Cyrill Stachniss 1 Three Main SLAM Paradigms Kalman filter Particle filter Graphbased least squares approach to SLAM 2 Least Squares in General Approach for computing a solution
Robot Mapping Least Squares Cyrill Stachniss 1 Three Main SLAM Paradigms Kalman filter Particle filter Graphbased least squares approach to SLAM 2 Least Squares in General Approach for computing a solution
Probabilistic Fundamentals in Robotics. DAUIN Politecnico di Torino July 2010
 Probabilistic Fundamentals in Robotics Probabilistic Models of Mobile Robots Robotic mapping Basilio Bona DAUIN Politecnico di Torino July 2010 Course Outline Basic mathematical framework Probabilistic
Probabilistic Fundamentals in Robotics Probabilistic Models of Mobile Robots Robotic mapping Basilio Bona DAUIN Politecnico di Torino July 2010 Course Outline Basic mathematical framework Probabilistic
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: Extended Kalman Filter Dr. Kostas Alexis (CSE) These slides relied on the lectures from C. Stachniss, J. Sturm and the book Probabilistic Robotics from Thurn et al.
Autonomous Mobile Robot Design Topic: Extended Kalman Filter Dr. Kostas Alexis (CSE) These slides relied on the lectures from C. Stachniss, J. Sturm and the book Probabilistic Robotics from Thurn et al.
Robotics 2 Target Tracking. Giorgio Grisetti, Cyrill Stachniss, Kai Arras, Wolfram Burgard
 Robotics 2 Target Tracking Giorgio Grisetti, Cyrill Stachniss, Kai Arras, Wolfram Burgard Linear Dynamical System (LDS) Stochastic process governed by is the state vector is the input vector is the process
Robotics 2 Target Tracking Giorgio Grisetti, Cyrill Stachniss, Kai Arras, Wolfram Burgard Linear Dynamical System (LDS) Stochastic process governed by is the state vector is the input vector is the process
Simultaneous Localization and Map Building Using Natural features in Outdoor Environments
 Simultaneous Localization and Map Building Using Natural features in Outdoor Environments Jose Guivant, Eduardo Nebot, Hugh Durrant Whyte Australian Centre for Field Robotics Department of Mechanical and
Simultaneous Localization and Map Building Using Natural features in Outdoor Environments Jose Guivant, Eduardo Nebot, Hugh Durrant Whyte Australian Centre for Field Robotics Department of Mechanical and
Introduction to Mobile Robotics Information Gain-Based Exploration. Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Giorgio Grisetti, Kai Arras
 Introduction to Mobile Robotics Information Gain-Based Exploration Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Giorgio Grisetti, Kai Arras 1 Tasks of Mobile Robots mapping SLAM localization integrated
Introduction to Mobile Robotics Information Gain-Based Exploration Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Giorgio Grisetti, Kai Arras 1 Tasks of Mobile Robots mapping SLAM localization integrated
2D Image Processing. Bayes filter implementation: Kalman filter
 2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
SLAM for Ship Hull Inspection using Exactly Sparse Extended Information Filters
 SLAM for Ship Hull Inspection using Exactly Sparse Extended Information Filters Matthew Walter 1,2, Franz Hover 1, & John Leonard 1,2 Massachusetts Institute of Technology 1 Department of Mechanical Engineering
SLAM for Ship Hull Inspection using Exactly Sparse Extended Information Filters Matthew Walter 1,2, Franz Hover 1, & John Leonard 1,2 Massachusetts Institute of Technology 1 Department of Mechanical Engineering
SLAM Techniques and Algorithms. Jack Collier. Canada. Recherche et développement pour la défense Canada. Defence Research and Development Canada
 SLAM Techniques and Algorithms Jack Collier Defence Research and Development Canada Recherche et développement pour la défense Canada Canada Goals What will we learn Gain an appreciation for what SLAM
SLAM Techniques and Algorithms Jack Collier Defence Research and Development Canada Recherche et développement pour la défense Canada Canada Goals What will we learn Gain an appreciation for what SLAM
L06. LINEAR KALMAN FILTERS. NA568 Mobile Robotics: Methods & Algorithms
 L06. LINEAR KALMAN FILTERS NA568 Mobile Robotics: Methods & Algorithms 2 PS2 is out! Landmark-based Localization: EKF, UKF, PF Today s Lecture Minimum Mean Square Error (MMSE) Linear Kalman Filter Gaussian
L06. LINEAR KALMAN FILTERS NA568 Mobile Robotics: Methods & Algorithms 2 PS2 is out! Landmark-based Localization: EKF, UKF, PF Today s Lecture Minimum Mean Square Error (MMSE) Linear Kalman Filter Gaussian
Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization
 Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras 1 Motivation Recall: Discrete filter Discretize the
Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras 1 Motivation Recall: Discrete filter Discretize the
From Bayes to Extended Kalman Filter
 From Bayes to Extended Kalman Filter Michal Reinštein Czech Technical University in Prague Faculty of Electrical Engineering, Department of Cybernetics Center for Machine Perception http://cmp.felk.cvut.cz/
From Bayes to Extended Kalman Filter Michal Reinštein Czech Technical University in Prague Faculty of Electrical Engineering, Department of Cybernetics Center for Machine Perception http://cmp.felk.cvut.cz/
Bayes Filter Reminder. Kalman Filter Localization. Properties of Gaussians. Gaussians. Prediction. Correction. σ 2. Univariate. 1 2πσ e.
 Kalman Filter Localization Bayes Filter Reminder Prediction Correction Gaussians p(x) ~ N(µ,σ 2 ) : Properties of Gaussians Univariate p(x) = 1 1 2πσ e 2 (x µ) 2 σ 2 µ Univariate -σ σ Multivariate µ Multivariate
Kalman Filter Localization Bayes Filter Reminder Prediction Correction Gaussians p(x) ~ N(µ,σ 2 ) : Properties of Gaussians Univariate p(x) = 1 1 2πσ e 2 (x µ) 2 σ 2 µ Univariate -σ σ Multivariate µ Multivariate
Advanced Techniques for Mobile Robotics Least Squares. Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz
 Advanced Techniques for Mobile Robotics Least Squares Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz Problem Given a system described by a set of n observation functions {f i (x)} i=1:n
Advanced Techniques for Mobile Robotics Least Squares Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz Problem Given a system described by a set of n observation functions {f i (x)} i=1:n
Probabilistic Robotics SLAM
 Probabilisic Roboics SLAM The SLAM Problem SLAM is he process by which a robo builds a map of he environmen and, a he same ime, uses his map o compue is locaion Localizaion: inferring locaion given a map
Probabilisic Roboics SLAM The SLAM Problem SLAM is he process by which a robo builds a map of he environmen and, a he same ime, uses his map o compue is locaion Localizaion: inferring locaion given a map
Amortized Constant Time State Estimation in SLAM using a Mixed Kalman-Information Filter
 1 Amortized Constant Time State Estimation in SLAM using a Mixed Kalman-Information Filter Viorela Ila Josep M. Porta Juan Andrade-Cetto Institut de Robòtica i Informàtica Industrial, CSIC-UPC, Barcelona,
1 Amortized Constant Time State Estimation in SLAM using a Mixed Kalman-Information Filter Viorela Ila Josep M. Porta Juan Andrade-Cetto Institut de Robòtica i Informàtica Industrial, CSIC-UPC, Barcelona,
2D Image Processing. Bayes filter implementation: Kalman filter
 2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Dr. Gabriele Bleser Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche
2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Dr. Gabriele Bleser Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche
Probabilistic Fundamentals in Robotics
 Probabilistic Fundamentals in Robotics Probabilistic Models of Mobile Robots Robot localization Basilio Bona DAUIN Politecnico di Torino June 2011 Course Outline Basic mathematical framework Probabilistic
Probabilistic Fundamentals in Robotics Probabilistic Models of Mobile Robots Robot localization Basilio Bona DAUIN Politecnico di Torino June 2011 Course Outline Basic mathematical framework Probabilistic
2D Image Processing (Extended) Kalman and particle filter
 Kalman and particle filter") 2D Image Processing (Extended) Kalman and particle filter Prof. Didier Stricker Dr. Gabriele Bleser Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz
2D Image Processing (Extended) Kalman and particle filter Prof. Didier Stricker Dr. Gabriele Bleser Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz
Robot Localisation. Henrik I. Christensen. January 12, 2007
 Robot Henrik I. Robotics and Intelligent Machines @ GT College of Computing Georgia Institute of Technology Atlanta, GA hic@cc.gatech.edu January 12, 2007 The Robot Structure Outline 1 2 3 4 Sum of 5 6
Robot Henrik I. Robotics and Intelligent Machines @ GT College of Computing Georgia Institute of Technology Atlanta, GA hic@cc.gatech.edu January 12, 2007 The Robot Structure Outline 1 2 3 4 Sum of 5 6
Robotics 2 Least Squares Estimation. Giorgio Grisetti, Cyrill Stachniss, Kai Arras, Maren Bennewitz, Wolfram Burgard
 Robotics 2 Least Squares Estimation Giorgio Grisetti, Cyrill Stachniss, Kai Arras, Maren Bennewitz, Wolfram Burgard Problem Given a system described by a set of n observation functions {f i (x)} i=1:n
Robotics 2 Least Squares Estimation Giorgio Grisetti, Cyrill Stachniss, Kai Arras, Maren Bennewitz, Wolfram Burgard Problem Given a system described by a set of n observation functions {f i (x)} i=1:n
Kalman filtering and friends: Inference in time series models. Herke van Hoof slides mostly by Michael Rubinstein
 Kalman filtering and friends: Inference in time series models Herke van Hoof slides mostly by Michael Rubinstein Problem overview Goal Estimate most probable state at time k using measurement up to time
Kalman filtering and friends: Inference in time series models Herke van Hoof slides mostly by Michael Rubinstein Problem overview Goal Estimate most probable state at time k using measurement up to time
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: Particle Filter for Localization Dr. Kostas Alexis (CSE) These slides relied on the lectures from C. Stachniss, and the book Probabilistic Robotics from Thurn et al.
Autonomous Mobile Robot Design Topic: Particle Filter for Localization Dr. Kostas Alexis (CSE) These slides relied on the lectures from C. Stachniss, and the book Probabilistic Robotics from Thurn et al.
Probabilistic Robotics SLAM
 Probabilisic Roboics SLAM The SLAM Problem SLAM is he process by which a robo builds a map of he environmen and, a he same ime, uses his map o compue is locaion Localizaion: inferring locaion given a map
Probabilisic Roboics SLAM The SLAM Problem SLAM is he process by which a robo builds a map of he environmen and, a he same ime, uses his map o compue is locaion Localizaion: inferring locaion given a map
ESTIMATOR STABILITY ANALYSIS IN SLAM. Teresa Vidal-Calleja, Juan Andrade-Cetto, Alberto Sanfeliu
 ESTIMATOR STABILITY ANALYSIS IN SLAM Teresa Vidal-Calleja, Juan Andrade-Cetto, Alberto Sanfeliu Institut de Robtica i Informtica Industrial, UPC-CSIC Llorens Artigas 4-6, Barcelona, 88 Spain {tvidal, cetto,
ESTIMATOR STABILITY ANALYSIS IN SLAM Teresa Vidal-Calleja, Juan Andrade-Cetto, Alberto Sanfeliu Institut de Robtica i Informtica Industrial, UPC-CSIC Llorens Artigas 4-6, Barcelona, 88 Spain {tvidal, cetto,
Probabilistic Fundamentals in Robotics. DAUIN Politecnico di Torino July 2010
 Probabilistic Fundamentals in Robotics Probabilistic Models of Mobile Robots Robot localization Basilio Bona DAUIN Politecnico di Torino July 2010 Course Outline Basic mathematical framework Probabilistic
Probabilistic Fundamentals in Robotics Probabilistic Models of Mobile Robots Robot localization Basilio Bona DAUIN Politecnico di Torino July 2010 Course Outline Basic mathematical framework Probabilistic
Introduction to Mobile Robotics SLAM: Simultaneous Localization and Mapping
 Inroducion o Mobile Roboics SLAM: Simulaneous Localizaion and Mapping Wolfram Burgard, Maren Bennewiz, Diego Tipaldi, Luciano Spinello Wha is SLAM? Esimae he pose of a robo and he map of he environmen
Inroducion o Mobile Roboics SLAM: Simulaneous Localizaion and Mapping Wolfram Burgard, Maren Bennewiz, Diego Tipaldi, Luciano Spinello Wha is SLAM? Esimae he pose of a robo and he map of he environmen
CIS 390 Fall 2016 Robotics: Planning and Perception Final Review Questions
 CIS 390 Fall 2016 Robotics: Planning and Perception Final Review Questions December 14, 2016 Questions Throughout the following questions we will assume that x t is the state vector at time t, z t is the
CIS 390 Fall 2016 Robotics: Planning and Perception Final Review Questions December 14, 2016 Questions Throughout the following questions we will assume that x t is the state vector at time t, z t is the
CS491/691: Introduction to Aerial Robotics
 CS491/691: Introduction to Aerial Robotics Topic: State Estimation Dr. Kostas Alexis (CSE) World state (or system state) Belief state: Our belief/estimate of the world state World state: Real state of
CS491/691: Introduction to Aerial Robotics Topic: State Estimation Dr. Kostas Alexis (CSE) World state (or system state) Belief state: Our belief/estimate of the world state World state: Real state of
On the Treatment of Relative-Pose Measurements for Mobile Robot Localization
 On the Treatment of Relative-Pose Measurements for Mobile Robot Localization Anastasios I. Mourikis and Stergios I. Roumeliotis Dept. of Computer Science & Engineering, University of Minnesota, Minneapolis,
On the Treatment of Relative-Pose Measurements for Mobile Robot Localization Anastasios I. Mourikis and Stergios I. Roumeliotis Dept. of Computer Science & Engineering, University of Minnesota, Minneapolis,
Sensor Tasking and Control
 Sensor Tasking and Control Sensing Networking Leonidas Guibas Stanford University Computation CS428 Sensor systems are about sensing, after all... System State Continuous and Discrete Variables The quantities
Sensor Tasking and Control Sensing Networking Leonidas Guibas Stanford University Computation CS428 Sensor systems are about sensing, after all... System State Continuous and Discrete Variables The quantities
10 Robotic Exploration and Information Gathering
 NAVARCH/EECS 568, ROB 530 - Winter 2018 10 Robotic Exploration and Information Gathering Maani Ghaffari April 2, 2018 Robotic Information Gathering: Exploration and Monitoring In information gathering
NAVARCH/EECS 568, ROB 530 - Winter 2018 10 Robotic Exploration and Information Gathering Maani Ghaffari April 2, 2018 Robotic Information Gathering: Exploration and Monitoring In information gathering
(W: 12:05-1:50, 50-N201)
") 2015 School of Information Technology and Electrical Engineering at the University of Queensland Schedule Week Date Lecture (W: 12:05-1:50, 50-N201) 1 29-Jul Introduction Representing Position & Orientation
2015 School of Information Technology and Electrical Engineering at the University of Queensland Schedule Week Date Lecture (W: 12:05-1:50, 50-N201) 1 29-Jul Introduction Representing Position & Orientation
Square Root Unscented Particle Filtering for Grid Mapping
 Square Root Unscented Particle Filtering for Grid Mapping Technical Report 2009/246 Simone Zandara and Ann E. Nicholson Clayton School of Information Technology Monash University Clayton, Victoria Australia.
Square Root Unscented Particle Filtering for Grid Mapping Technical Report 2009/246 Simone Zandara and Ann E. Nicholson Clayton School of Information Technology Monash University Clayton, Victoria Australia.
Particle Filters. Pieter Abbeel UC Berkeley EECS. Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics
 Particle Filters Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Motivation For continuous spaces: often no analytical formulas for Bayes filter updates
Particle Filters Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Motivation For continuous spaces: often no analytical formulas for Bayes filter updates
Fast Incremental Square Root Information Smoothing
 Fast Incremental Square Root Information Smoothing Michael Kaess, Ananth Ranganathan, and Frank Dellaert Center for Robotics and Intelligent Machines, College of Computing Georgia Institute of Technology,
Fast Incremental Square Root Information Smoothing Michael Kaess, Ananth Ranganathan, and Frank Dellaert Center for Robotics and Intelligent Machines, College of Computing Georgia Institute of Technology,
A Provably Consistent Method for Imposing Sparsity in Feature-based SLAM Information Filters
 A Provably Consistent Method for Imposing Sparsity in Feature-based SLAM Information Filters Matthew Walter, Ryan Eustice, John Leonard Computer Science and Artificial Intelligence Laboratory Department
A Provably Consistent Method for Imposing Sparsity in Feature-based SLAM Information Filters Matthew Walter, Ryan Eustice, John Leonard Computer Science and Artificial Intelligence Laboratory Department
Observability-based Rules for Designing Consistent EKF SLAM Estimators
 The International Journal of Robotics Research OnlineFirst, published on December 11, 2009 as doi:10.1177/0278364909353640 Guoquan P. Huang Department of Computer Science and Engineering, University of
The International Journal of Robotics Research OnlineFirst, published on December 11, 2009 as doi:10.1177/0278364909353640 Guoquan P. Huang Department of Computer Science and Engineering, University of
A Provably Consistent Method for Imposing Sparsity in Feature-based SLAM Information Filters
 A Provably Consistent Method for Imposing Sparsity in Feature-based SLAM Information Filters Matthew Walter 1,RyanEustice 2,and John Leonard 1 1 Computer Science and Artificial Intelligence Laboratory
A Provably Consistent Method for Imposing Sparsity in Feature-based SLAM Information Filters Matthew Walter 1,RyanEustice 2,and John Leonard 1 1 Computer Science and Artificial Intelligence Laboratory
EKF, UKF. Pieter Abbeel UC Berkeley EECS. Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics
 EKF, UKF Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Kalman Filter Kalman Filter = special case of a Bayes filter with dynamics model and sensory
EKF, UKF Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Kalman Filter Kalman Filter = special case of a Bayes filter with dynamics model and sensory
EKF, UKF. Pieter Abbeel UC Berkeley EECS. Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics
 EKF, UKF Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Kalman Filter Kalman Filter = special case of a Bayes filter with dynamics model and sensory
EKF, UKF Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Kalman Filter Kalman Filter = special case of a Bayes filter with dynamics model and sensory
Recursive Bayes Filtering
 Recursive Bayes Filtering CS485 Autonomous Robotics Amarda Shehu Fall 2013 Notes modified from Wolfram Burgard, University of Freiburg Physical Agents are Inherently Uncertain Uncertainty arises from four
Recursive Bayes Filtering CS485 Autonomous Robotics Amarda Shehu Fall 2013 Notes modified from Wolfram Burgard, University of Freiburg Physical Agents are Inherently Uncertain Uncertainty arises from four
The Belief Roadmap: Efficient Planning in Belief Space by Factoring the Covariance. Samuel Prentice and Nicholas Roy Presentation by Elaine Short
 The Belief Roadmap: Efficient Planning in Belief Space by Factoring the Covariance Samuel Prentice and Nicholas Roy Presentation by Elaine Short 1 Outline" Motivation Review of PRM and EKF Factoring the
The Belief Roadmap: Efficient Planning in Belief Space by Factoring the Covariance Samuel Prentice and Nicholas Roy Presentation by Elaine Short 1 Outline" Motivation Review of PRM and EKF Factoring the
Sparse Extended Information Filters: Insights into Sparsification
 Sparse Extended Information Filters: Insights into Sparsification Ryan Eustice Department of Applied Ocean Physics and Engineering Woods Hole Oceanographic Institution Woods Hole, MA, USA ryan@whoi.edu
Sparse Extended Information Filters: Insights into Sparsification Ryan Eustice Department of Applied Ocean Physics and Engineering Woods Hole Oceanographic Institution Woods Hole, MA, USA ryan@whoi.edu
An alternative to the Mahalanobis distance for determining optimal correspondences in data association
 IEEE Transactions on Robotics, vol.28, no.4, pp.980-986, Aug. 2012. doi: 10.1109/TRO.2012.2193706 1 An alternative to the Mahalanobis distance for determining optimal correspondences in data association
IEEE Transactions on Robotics, vol.28, no.4, pp.980-986, Aug. 2012. doi: 10.1109/TRO.2012.2193706 1 An alternative to the Mahalanobis distance for determining optimal correspondences in data association
AUTOMOTIVE ENVIRONMENT SENSORS
 AUTOMOTIVE ENVIRONMENT SENSORS Lecture 5. Localization BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Related concepts Concepts related to vehicles moving
AUTOMOTIVE ENVIRONMENT SENSORS Lecture 5. Localization BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Related concepts Concepts related to vehicles moving
THE goal of simultaneous localization and mapping
 IEEE TRANSACTIONS ON ROBOTICS, MANUSCRIPT SEPTEMBER 7, 2008 1 isam: Incremental Smoothing and Mapping Michael Kaess, Student Member, IEEE, Ananth Ranganathan, Student Member, IEEE, and Fran Dellaert, Member,
IEEE TRANSACTIONS ON ROBOTICS, MANUSCRIPT SEPTEMBER 7, 2008 1 isam: Incremental Smoothing and Mapping Michael Kaess, Student Member, IEEE, Ananth Ranganathan, Student Member, IEEE, and Fran Dellaert, Member,
Lecture 2: From Linear Regression to Kalman Filter and Beyond
 Lecture 2: From Linear Regression to Kalman Filter and Beyond Department of Biomedical Engineering and Computational Science Aalto University January 26, 2012 Contents 1 Batch and Recursive Estimation
Lecture 2: From Linear Regression to Kalman Filter and Beyond Department of Biomedical Engineering and Computational Science Aalto University January 26, 2012 Contents 1 Batch and Recursive Estimation
Simultaneous Mapping and Localization With Sparse Extended Information Filters: Theory and Initial Results
 Simultaneous Mapping and Localization With Sparse Extended Information Filters: Theory and Initial Results Sebastian Thrun 1, Daphne Koller 2, Zoubin Ghahramani 3, Hugh Durrant-Whyte 4, and Andrew Y. Ng
Simultaneous Mapping and Localization With Sparse Extended Information Filters: Theory and Initial Results Sebastian Thrun 1, Daphne Koller 2, Zoubin Ghahramani 3, Hugh Durrant-Whyte 4, and Andrew Y. Ng
Unscented Transformation of Vehicle States in SLAM
 Unscented Transformation of Vehicle States in SLAM Juan Andrade-Cetto, Teresa Vidal-Calleja, and Alberto Sanfeliu Institut de Robòtica i Informàtica Industrial, UPC-CSIC Llorens Artigas 4-6, Barcelona,
Unscented Transformation of Vehicle States in SLAM Juan Andrade-Cetto, Teresa Vidal-Calleja, and Alberto Sanfeliu Institut de Robòtica i Informàtica Industrial, UPC-CSIC Llorens Artigas 4-6, Barcelona,
1 Introduction 1.1 Problem Denition The general problem we want tosolve is to let a mobile robot explore an unknown environment using range sensing an
 Globally Consistent Range Scan Alignment for Environment Mapping F. Lu, E. Milios Department of Computer Science, York University, North York, Ontario, Canada flufeng, eemg@cs.yorku.ca April 17, 1997 Abstract
Globally Consistent Range Scan Alignment for Environment Mapping F. Lu, E. Milios Department of Computer Science, York University, North York, Ontario, Canada flufeng, eemg@cs.yorku.ca April 17, 1997 Abstract
Information Gain-based Exploration Using Rao-Blackwellized Particle Filters
 Information Gain-based Exploration Using Rao-Blackwellized Particle Filters Cyrill Stachniss Giorgio Grisetti Wolfram Burgard University of Freiburg, Department of Computer Science, D-79110 Freiburg, Germany
Information Gain-based Exploration Using Rao-Blackwellized Particle Filters Cyrill Stachniss Giorgio Grisetti Wolfram Burgard University of Freiburg, Department of Computer Science, D-79110 Freiburg, Germany
Square Root Iterated Kalman Filter for Bearing-Only SLAM
 Square Root Iterated Kalman Filter for Bearing-Only SLAM Hyungpil Moon, George Kantor, Howie Choset he Robotics Institute, Carnegie Mellon University, USA hyungpil,kantor@cmu.edu, choset@cs.cmu.edu Stephen
Square Root Iterated Kalman Filter for Bearing-Only SLAM Hyungpil Moon, George Kantor, Howie Choset he Robotics Institute, Carnegie Mellon University, USA hyungpil,kantor@cmu.edu, choset@cs.cmu.edu Stephen
Online estimation of covariance parameters using extended Kalman filtering and application to robot localization
 Online estimation of covariance parameters using extended Kalman filtering and application to robot localization Gianluigi Pillonetto Gorkem Erinc and Stefano Carpin Department of Information Engineering,
Online estimation of covariance parameters using extended Kalman filtering and application to robot localization Gianluigi Pillonetto Gorkem Erinc and Stefano Carpin Department of Information Engineering,
Simultaneous Localization and Mapping - A Discussion
 Simultaneous Localization and Mapping - A Discussion U. Frese and G. Hirzinger Deutsches Zentrum für Luft- und Raumfahrt (DLR) Institut für Robotik und Mechatronik Email: Udo.Frese@dlr.de www.robotic.dlr.de
Simultaneous Localization and Mapping - A Discussion U. Frese and G. Hirzinger Deutsches Zentrum für Luft- und Raumfahrt (DLR) Institut für Robotik und Mechatronik Email: Udo.Frese@dlr.de www.robotic.dlr.de
Conditions for Suboptimal Filter Stability in SLAM
 Conditions for Suboptimal Filter Stability in SLAM Teresa Vidal-Calleja, Juan Andrade-Cetto and Alberto Sanfeliu Institut de Robòtica i Informàtica Industrial, UPC-CSIC Llorens Artigas -, Barcelona, Spain
Conditions for Suboptimal Filter Stability in SLAM Teresa Vidal-Calleja, Juan Andrade-Cetto and Alberto Sanfeliu Institut de Robòtica i Informàtica Industrial, UPC-CSIC Llorens Artigas -, Barcelona, Spain
Lecture 22: Graph-SLAM (2)
") Lecture 22: Graph-SLAM (2) Dr. J.B. Hayet CENTRO DE INVESTIGACIÓN EN MATEMÁTICAS Abril 2014 J.B. Hayet Probabilistic robotics Abril 2014 1 / 35 Outline 1 Data association in Graph-SLAM 2 Improvements and
Lecture 22: Graph-SLAM (2) Dr. J.B. Hayet CENTRO DE INVESTIGACIÓN EN MATEMÁTICAS Abril 2014 J.B. Hayet Probabilistic robotics Abril 2014 1 / 35 Outline 1 Data association in Graph-SLAM 2 Improvements and
Mobile Robots Localization
 Mobile Robots Localization Institute for Software Technology 1 Today s Agenda Motivation for Localization Odometry Odometry Calibration Error Model 2 Robotics is Easy control behavior perception modelling
Mobile Robots Localization Institute for Software Technology 1 Today s Agenda Motivation for Localization Odometry Odometry Calibration Error Model 2 Robotics is Easy control behavior perception modelling
Robot Localization and Kalman Filters
 Robot Localization and Kalman Filters Rudy Negenborn rudy@negenborn.net August 26, 2003 Outline Robot Localization Probabilistic Localization Kalman Filters Kalman Localization Kalman Localization with
Robot Localization and Kalman Filters Rudy Negenborn rudy@negenborn.net August 26, 2003 Outline Robot Localization Probabilistic Localization Kalman Filters Kalman Localization Kalman Localization with
A Comparison of the EKF, SPKF, and the Bayes Filter for Landmark-Based Localization
 A Comparison of the EKF, SPKF, and the Bayes Filter for Landmark-Based Localization and Timothy D. Barfoot CRV 2 Outline Background Objective Experimental Setup Results Discussion Conclusion 2 Outline
A Comparison of the EKF, SPKF, and the Bayes Filter for Landmark-Based Localization and Timothy D. Barfoot CRV 2 Outline Background Objective Experimental Setup Results Discussion Conclusion 2 Outline
A decentralized Polynomial based SLAM algorithm for a team of mobile robots
 Preprints of the 19th World Congress The International Federation of Automatic Control A decentralized Polynomial based SLAM algorithm for a team of mobile robots Luigi D Alfonso, Antonio Grano, Pietro
Preprints of the 19th World Congress The International Federation of Automatic Control A decentralized Polynomial based SLAM algorithm for a team of mobile robots Luigi D Alfonso, Antonio Grano, Pietro
CS 532: 3D Computer Vision 6 th Set of Notes
 1 CS 532: 3D Computer Vision 6 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Lecture Outline Intro to Covariance
1 CS 532: 3D Computer Vision 6 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Lecture Outline Intro to Covariance
Why Bayesian? Rigorous approach to address statistical estimation problems. The Bayesian philosophy is mature and powerful.
 Why Bayesian? Rigorous approach to address statistical estimation problems. The Bayesian philosophy is mature and powerful. Even if you aren t Bayesian, you can define an uninformative prior and everything
Why Bayesian? Rigorous approach to address statistical estimation problems. The Bayesian philosophy is mature and powerful. Even if you aren t Bayesian, you can define an uninformative prior and everything
Introduction to Mobile Robotics Bayes Filter Kalman Filter
 Introduction to Mobile Robotics Bayes Filter Kalman Filter Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Giorgio Grisetti, Kai Arras 1 Bayes Filter Reminder 1. Algorithm Bayes_filter( Bel(x),d ):
Introduction to Mobile Robotics Bayes Filter Kalman Filter Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Giorgio Grisetti, Kai Arras 1 Bayes Filter Reminder 1. Algorithm Bayes_filter( Bel(x),d ):
Bayesian Interaction Primitives: A SLAM Approach to Human-Robot Interaction
 Bayesian Interaction Primitives: A SLAM Approach to Human-Robot Interaction Joseph Campbell CIDSE Arizona State University, United States jacampb1@asu.edu Heni Ben Amor CIDSE Arizona State University,
Bayesian Interaction Primitives: A SLAM Approach to Human-Robot Interaction Joseph Campbell CIDSE Arizona State University, United States jacampb1@asu.edu Heni Ben Amor CIDSE Arizona State University,
Towards Uncertainty-Aware Path Planning On Road Networks Using Augmented-MDPs. Lorenzo Nardi and Cyrill Stachniss
 Towards Uncertainty-Aware Path Planning On Road Networks Using Augmented-MDPs Lorenzo Nardi and Cyrill Stachniss Navigation under uncertainty C B C B A A 2 `B` is the most likely position C B C B A A 3
Towards Uncertainty-Aware Path Planning On Road Networks Using Augmented-MDPs Lorenzo Nardi and Cyrill Stachniss Navigation under uncertainty C B C B A A 2 `B` is the most likely position C B C B A A 3
9 Multi-Model State Estimation
 Technion Israel Institute of Technology, Department of Electrical Engineering Estimation and Identification in Dynamical Systems (048825) Lecture Notes, Fall 2009, Prof. N. Shimkin 9 Multi-Model State
Technion Israel Institute of Technology, Department of Electrical Engineering Estimation and Identification in Dynamical Systems (048825) Lecture Notes, Fall 2009, Prof. N. Shimkin 9 Multi-Model State
Information Exchange in Multi-rover SLAM
 nformation Exchange in Multi-rover SLAM Brandon M Jones and Lang Tong School of Electrical and Computer Engineering Cornell University, thaca, NY 53 {bmj3,lt35}@cornelledu Abstract We investigate simultaneous
nformation Exchange in Multi-rover SLAM Brandon M Jones and Lang Tong School of Electrical and Computer Engineering Cornell University, thaca, NY 53 {bmj3,lt35}@cornelledu Abstract We investigate simultaneous
Kalman Filter. Predict: Update: x k k 1 = F k x k 1 k 1 + B k u k P k k 1 = F k P k 1 k 1 F T k + Q
 Kalman Filter Kalman Filter Predict: x k k 1 = F k x k 1 k 1 + B k u k P k k 1 = F k P k 1 k 1 F T k + Q Update: K = P k k 1 Hk T (H k P k k 1 Hk T + R) 1 x k k = x k k 1 + K(z k H k x k k 1 ) P k k =(I
Kalman Filter Kalman Filter Predict: x k k 1 = F k x k 1 k 1 + B k u k P k k 1 = F k P k 1 k 1 F T k + Q Update: K = P k k 1 Hk T (H k P k k 1 Hk T + R) 1 x k k = x k k 1 + K(z k H k x k k 1 ) P k k =(I
Lecture 2: From Linear Regression to Kalman Filter and Beyond
 Lecture 2: From Linear Regression to Kalman Filter and Beyond January 18, 2017 Contents 1 Batch and Recursive Estimation 2 Towards Bayesian Filtering 3 Kalman Filter and Bayesian Filtering and Smoothing
Lecture 2: From Linear Regression to Kalman Filter and Beyond January 18, 2017 Contents 1 Batch and Recursive Estimation 2 Towards Bayesian Filtering 3 Kalman Filter and Bayesian Filtering and Smoothing
Stochastic Mapping Frameworks
 Stochastic Mapping Frameworks Richard J. Rikoski, John J. Leonard, and Paul M. Newman Marine Robotics Laboratory Massachusetts Institute of Technology 77 Mass Ave., Cambridge, MA 9 rikoski@mit.edu,jleonard@mit.edu,pnewman@mit.edu
Stochastic Mapping Frameworks Richard J. Rikoski, John J. Leonard, and Paul M. Newman Marine Robotics Laboratory Massachusetts Institute of Technology 77 Mass Ave., Cambridge, MA 9 rikoski@mit.edu,jleonard@mit.edu,pnewman@mit.edu
Cooperative relative robot localization with audible acoustic sensing
 Cooperative relative robot localization with audible acoustic sensing Yuanqing Lin, Paul Vernaza, Jihun Ham, and Daniel D. Lee GRASP Laboratory, Department of Electrical and Systems Engineering, University
Cooperative relative robot localization with audible acoustic sensing Yuanqing Lin, Paul Vernaza, Jihun Ham, and Daniel D. Lee GRASP Laboratory, Department of Electrical and Systems Engineering, University
Analysis and Improvement of the Consistency of Extended Kalman Filter based SLAM
 Analysis and Improvement of the Consistency of Extended Kalman Filter based SLAM Guoquan Huang, Anastasios I Mourikis and Stergios I Roumeliotis Multiple Autonomous Robotic Systems Labroratory Technical
Analysis and Improvement of the Consistency of Extended Kalman Filter based SLAM Guoquan Huang, Anastasios I Mourikis and Stergios I Roumeliotis Multiple Autonomous Robotic Systems Labroratory Technical
Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems
 Robots for People --- A project for intelligent integrated systems") 1 Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems V. Estivill-Castro 2 Uncertainty representation Localization Chapter 5 (textbook) What is the course about?
1 Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems V. Estivill-Castro 2 Uncertainty representation Localization Chapter 5 (textbook) What is the course about?
Results: MCMC Dancers, q=10, n=500
 Motivation Sampling Methods for Bayesian Inference How to track many INTERACTING targets? A Tutorial Frank Dellaert Results: MCMC Dancers, q=10, n=500 1 Probabilistic Topological Maps Results Real-Time
Motivation Sampling Methods for Bayesian Inference How to track many INTERACTING targets? A Tutorial Frank Dellaert Results: MCMC Dancers, q=10, n=500 1 Probabilistic Topological Maps Results Real-Time
CSE 473: Artificial Intelligence
 CSE 473: Artificial Intelligence Hidden Markov Models Dieter Fox --- University of Washington [Most slides were created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All CS188 materials
CSE 473: Artificial Intelligence Hidden Markov Models Dieter Fox --- University of Washington [Most slides were created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All CS188 materials
1 Kalman Filter Introduction
 1 Kalman Filter Introduction You should first read Chapter 1 of Stochastic models, estimation, and control: Volume 1 by Peter S. Maybec (available here). 1.1 Explanation of Equations (1-3) and (1-4) Equation
1 Kalman Filter Introduction You should first read Chapter 1 of Stochastic models, estimation, and control: Volume 1 by Peter S. Maybec (available here). 1.1 Explanation of Equations (1-3) and (1-4) Equation
Simultaneous Localization and Mapping Techniques
 Simultaneous Localization and Mapping Techniques Andrew Hogue Oral Exam: June 20, 2005 Contents 1 Introduction 1 1.1 Why is SLAM necessary?.................................. 2 1.2 A Brief History of SLAM...................................
Simultaneous Localization and Mapping Techniques Andrew Hogue Oral Exam: June 20, 2005 Contents 1 Introduction 1 1.1 Why is SLAM necessary?.................................. 2 1.2 A Brief History of SLAM...................................
Autonomous Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 6.2: Kalman Filter Jürgen Sturm Technische Universität München Motivation Bayes filter is a useful tool for state
Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 6.2: Kalman Filter Jürgen Sturm Technische Universität München Motivation Bayes filter is a useful tool for state
SC-KF Mobile Robot Localization: A Stochastic-Cloning Kalman Filter for Processing Relative-State Measurements
 1 SC-KF Mobile Robot Localization: A Stochastic-Cloning Kalman Filter for Processing Relative-State Measurements Anastasios I. Mourikis, Stergios I. Roumeliotis, and Joel W. Burdick Abstract This paper
1 SC-KF Mobile Robot Localization: A Stochastic-Cloning Kalman Filter for Processing Relative-State Measurements Anastasios I. Mourikis, Stergios I. Roumeliotis, and Joel W. Burdick Abstract This paper
Robotics. Lecture 4: Probabilistic Robotics. See course website for up to date information.
 Robotics Lecture 4: Probabilistic Robotics See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College London Review: Sensors
Robotics Lecture 4: Probabilistic Robotics See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College London Review: Sensors
Data Fusion Kalman Filtering Self Localization
 Data Fusion Kalman Filtering Self Localization Armando Jorge Sousa http://www.fe.up.pt/asousa asousa@fe.up.pt Faculty of Engineering, University of Porto, Portugal Department of Electrical and Computer
Data Fusion Kalman Filtering Self Localization Armando Jorge Sousa http://www.fe.up.pt/asousa asousa@fe.up.pt Faculty of Engineering, University of Porto, Portugal Department of Electrical and Computer
Hidden Markov Models. Hal Daumé III. Computer Science University of Maryland CS 421: Introduction to Artificial Intelligence 19 Apr 2012
 Hidden Markov Models Hal Daumé III Computer Science University of Maryland me@hal3.name CS 421: Introduction to Artificial Intelligence 19 Apr 2012 Many slides courtesy of Dan Klein, Stuart Russell, or
Hidden Markov Models Hal Daumé III Computer Science University of Maryland me@hal3.name CS 421: Introduction to Artificial Intelligence 19 Apr 2012 Many slides courtesy of Dan Klein, Stuart Russell, or
Localización Dinámica de Robots Móviles Basada en Filtrado de Kalman y Triangulación
 Universidad Pública de Navarra 13 de Noviembre de 2008 Departamento de Ingeniería Mecánica, Energética y de Materiales Localización Dinámica de Robots Móviles Basada en Filtrado de Kalman y Triangulación
Universidad Pública de Navarra 13 de Noviembre de 2008 Departamento de Ingeniería Mecánica, Energética y de Materiales Localización Dinámica de Robots Móviles Basada en Filtrado de Kalman y Triangulación
COS Lecture 16 Autonomous Robot Navigation
 COS 495 - Lecture 16 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
COS 495 - Lecture 16 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
Markov Models. CS 188: Artificial Intelligence Fall Example. Mini-Forward Algorithm. Stationary Distributions.
 CS 88: Artificial Intelligence Fall 27 Lecture 2: HMMs /6/27 Markov Models A Markov model is a chain-structured BN Each node is identically distributed (stationarity) Value of X at a given time is called
CS 88: Artificial Intelligence Fall 27 Lecture 2: HMMs /6/27 Markov Models A Markov model is a chain-structured BN Each node is identically distributed (stationarity) Value of X at a given time is called