EKF and SLAM. McGill COMP 765 Sept 18 th, 2017
|
|
|
- Osborne McDonald
- 5 years ago
- Views:
Transcription
1 EKF and SLAM McGill COMP 765 Sept 18 th, 2017
2 Outline News and information Instructions for paper presentations Continue on Kalman filter: EKF and extension to mapping Example of a real mapping system: visual structure from motion
3 Next 3 Lectures Sept 21 st Normal room Lead by Florian and Travis Required reading (at least quickly) the 2 papers listed on the list Sept 26 th and 28 th MC 103 Joint with COMP 417 Lead by Jose Ruis, Professor in intelligent control from Mexico
4 Paper Presentations Presenters: Read the paper carefully Prepare roughly 15 minutes of speaking. Can include showing the paper pdf and using their figures, probably better to show some powerpoint summary, say things in your own words Goal is to identify key points of the paper, teach the class something Goal is not to be a complete expert. It s OK to raise confusing points. Remember, all research papers are imperfect! Audience: Read the papers ahead, come up with questions on the spot. Fill out feedback forms afterwards.
5 Assumptions guarantee that if the prior belief before the prediction step is Gaussian Kalman Filter: an instance of Bayes Filter then the prior belief after the prediction step will be Gaussian and the posterior belief (after the update step) will be Gaussian. Linear observations with Gaussian noise Linear dynamics with Gaussian noise Initial belief is Gaussian
6 Assumptions guarantee that if the prior belief before the prediction step is Gaussian Kalman Filter: an instance of Bayes Filter then the prior belief after the prediction step will be Gaussian Suppose you replace the linear models with nonlinear models. and the posterior belief (after the update step) will be Gaussian. Does the posterior Gaussian? remain Linear observations with Gaussian noise Linear dynamics with Gaussian noise Initial belief is Gaussian
7 Assumptions guarantee that if the prior belief before the prediction step is Gaussian Kalman Filter: an instance of Bayes Filter then the prior belief after the prediction step will be Gaussian Suppose you replace the linear models with nonlinear models. and the posterior belief (after the update step) will be Gaussian. Does the posterior Gaussian? NO remain Linear observations with Gaussian noise Linear dynamics with Gaussian noise Initial belief is Gaussian
8 Linearity Assumption Revisited If and then 8
9 Nonlinear Function If and then y is not necessarily distributed as a Gaussian. 9
10 Nonlinear Function If and then y is not necessarily distributed as a Gaussian. How can we approximate p(y) using a single Gaussian, without having a formula for p(y)? IDEA #1: MONTE CARLO SAMPLING - Draw many (e.g. 10^6) samples xi ~ p(x) - Pass them through the nonlinear function yi = g(xi) - Compute the empirical mean (m) and covariance (S) of the samples yi - Return Normal(m, S) IDEA #2: LINEARIZE THE NONLINEAR FUNCTIONS f, h - Then we are in the case y = Gx +c, so p(y) is a Gaussian 10
11 Nonlinear Function This is how we computed the Gaussian approximation of p(y). If and then y is not necessarily distributed as a Gaussian. How can we approximate p(y) using a single Gaussian, without having a formula for p(y)? IDEA #1: MONTE CARLO SAMPLING - Draw many (e.g. 10^6) samples xi ~ p(x) - Pass them through the nonlinear function yi = g(xi) - Compute the empirical mean (m) and covariance (S) of the samples yi - Return Normal(m, S) IDEA #2: LINEARIZE THE NONLINEAR FUNCTIONS f, h - Then we are in the case y = Gx +c, so p(y) is a Gaussian 11
12 Nonlinear Function Bad idea to use in Kalman Filter because we want to approximate p(y) efficiently. If and then y is not necessarily distributed as a Gaussian. How can we approximate p(y) using a single Gaussian, without having a formula for p(y)? IDEA #1: MONTE CARLO SAMPLING - Draw many (e.g. 10^6) samples xi ~ p(x) - Pass them through the nonlinear function yi = g(xi) - Compute the empirical mean (m) and covariance (S) of the samples yi - Return Normal(m, S) IDEA #2: LINEARIZE THE NONLINEAR FUNCTIONS f, h - Then we are in the case y = Gx +c, so p(y) is a Gaussian 12
13 Linearization Notice how the Linearization approximation differs from the Monte Carlo approximation (which is better, provided sufficiently many samples). That said, the Linearization approximation can be computed efficiently, and can be integrated into the Kalman Filter estimator Extended Kalman Filter 13
14 Linearization with low approximation error The quality of the linearization approximation depends on the uncertainty of p(x) but also on the shape of the nonlinearity g(x). In this example p(x) has small variance so most points will be concentrated around 0.5 and will pass through a very small region of g(x), where g(x) is close to linear. In this case p(y) is nearly Gaussian, and the Linearization approximation matches the Monte Carlo approximation. 14
15 Linearization with high approximation error The quality of the linearization approximation depends on the uncertainty of p(x) but also on the shape of the nonlinearity g(x). In this example p(x) has high variance so points g(x) will be spread out around g(0.5), where g(x) is not close to linear. In this case p(y) is multimodal, and the Linearization approximation matches the Monte Carlo approximation are both suboptimal approximations. Again Monte Carlo is better, provided sufficient samples. 15

16 How do we linearize? Using the first order Taylor expansion around the mean of the previous update step s state estimate: Recall how to compute the Jacobian matrix. For example, if then the Jacobian of f with respect to at is Constant term with respect to the state


17 How do we linearize? Using the first-order Taylor expansion around the mean of the previous prediction step s state estimate: Recall how to compute the Jacobian matrix. For example, if then the Jacobian of f with respect to at is Constant term with respect to the state
18 Assumptions guarantee that if the prior belief before the prediction step is Gaussian Extended Kalman Filter: an instance of Bayes Filter then the prior belief after the prediction step will be Gaussian and the posterior belief (after the update step) will be Gaussian. Linear observations with Gaussian noise Linear dynamics with Gaussian noise Initial belief is Gaussian
19 Dynamics Measurements EKF in N dimensions Init Prediction Step Update Step Received measurement but expected to receive Prediction residual is a Gaussian random variable where the covariance of the residual is Kalman Gain (optimal correction factor):
20 EKF Summary As in KF, inverting the covariance of the residual is O(k^2.376) Efficient: Polynomial in measurement dimensionality k and state dimensionality n: O(k n 2 ) Not optimal (unlike the Kalman Filter for linear systems) Can diverge if nonlinearities are large Works surprisingly well even when all assumptions are violated 20
21 Example #1: EKF-Localization Using sensory information to locate the robot in its environment is the most fundamental problem to providing a mobile robot with autonomous capabilities. [Cox 91] Given Map of the environment. Sequence of sensor measurements. Wanted Estimate of the robot s position. Problem classes Position tracking Global localization Kidnapped robot problem (recovery) 21

22 Landmark-based Localization Landmarks, whose position in the world is known. Each robot measures its range and bearing from each landmark to localize itself. State of a robot: 22

23 Landmark-based Localization Measurement at time t, is a variable-sized vector, depending on the landmarks that are visible at time t. Each measurement is a 2D vector, containing range and bearing from the robot to a landmark. 23
24 Estimation Sequence (1) 24
25 Estimation Sequence (2) 25
26 Comparison to true trajectory 26
27 Introducing: The SLAM problem So far we have assumed measurement model is only a function of the state and observation: this assumes knowledge of the world map (example 3 doors environment) Robots often have the need to navigate without a pre-known map. This requires simultaneously building a map and localizing the robot: the SLAM problem (example, jointly determine where the doors and robot are located)

28 Given: The robot s controls Observations of nearby features Estimate: First method: EKF-SLAM A robot is exploring an unknown, static environment. Map of features Path of the robot 28

29 Structure of Landmark-based SLAM 29
30 Why is SLAM a hard problem? SLAM: robot path and map are both unknown Robot path error correlates errors in the map 30
31 Why is SLAM a hard problem? Robot pose uncertainty In the real world, the mapping between observations and landmarks is unknown Picking wrong data associations can have catastrophic consequences Pose error correlates data associations 31
32 , ), ( N N N N N N N N N N N l l l l l l yl xl l l l l l l yl xl l l l l l l yl xl l l l y x yl yl yl y y xy xl xl xl x xy x N t t l l l y x m x Bel Map with N landmarks: (3+2N)-dimensional Gaussian Can handle hundreds of dimensions EKF-SLAM
33 EKF-SLAM Map Covariance matrix 33

34 EKF-SLAM Map Covariance matrix 34

35 EKF-SLAM Map Covariance matrix 35
36 Properties of EKF-SLAM (Linear Case) [Dissanayake et al., 2001] Theorem: The determinant of any sub-matrix of the map covariance matrix decreases monotonically as successive observations are made. Theorem: In the limit the landmark estimates become fully correlated 36
37 Example 2: Particle Filter SLAM (the dumb way) Augment each particle s state estimate with full map information Each particle contains a full copy of the map What are the practical implications of this?
38 Example 3: Rao-Blackwellized Particle Filters (the modern way)
39 Visual SLAM Localization and mapping with measurements usually coming from tracking image features: keypoints/corners edges image intensity patches Can use one or more cameras Visual Odometry Real-time localization with measurements usually coming from tracking image features: keypoints/corners edges image intensity patches Can use one or more cameras
40 Structure from Motion How can we estimate both 3D point positions and the relative camera transformations? Sometimes also called bundle adjustment Q: Why is it different than SLAM? A: SLAM potentially includes - loop closure - dynamics constraints - velocities, accelerations
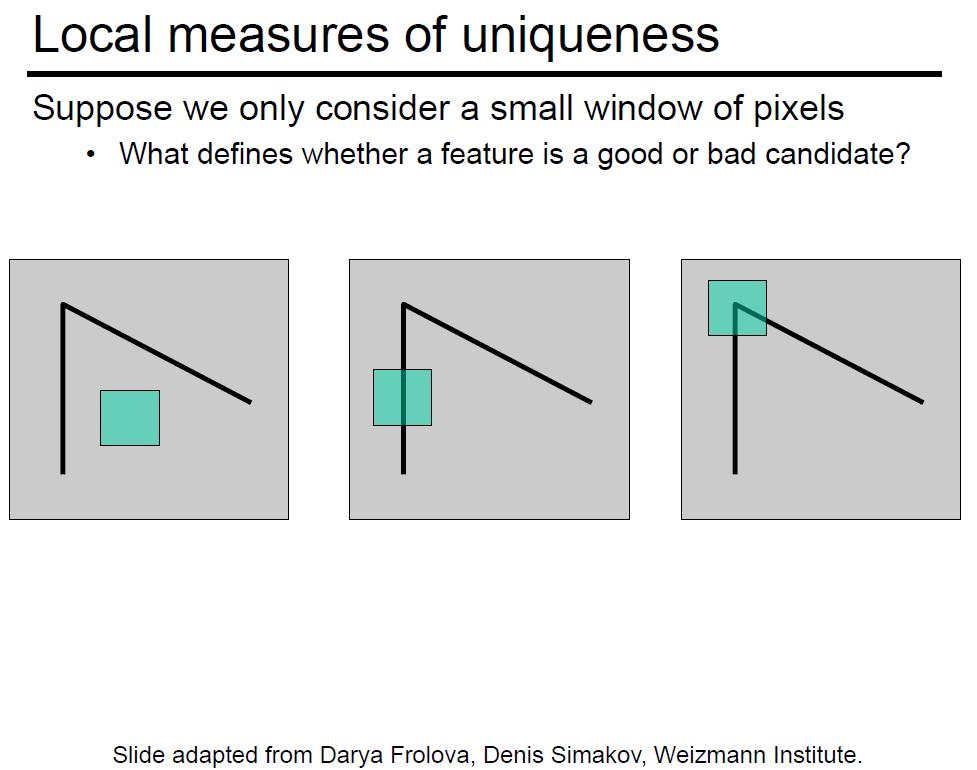
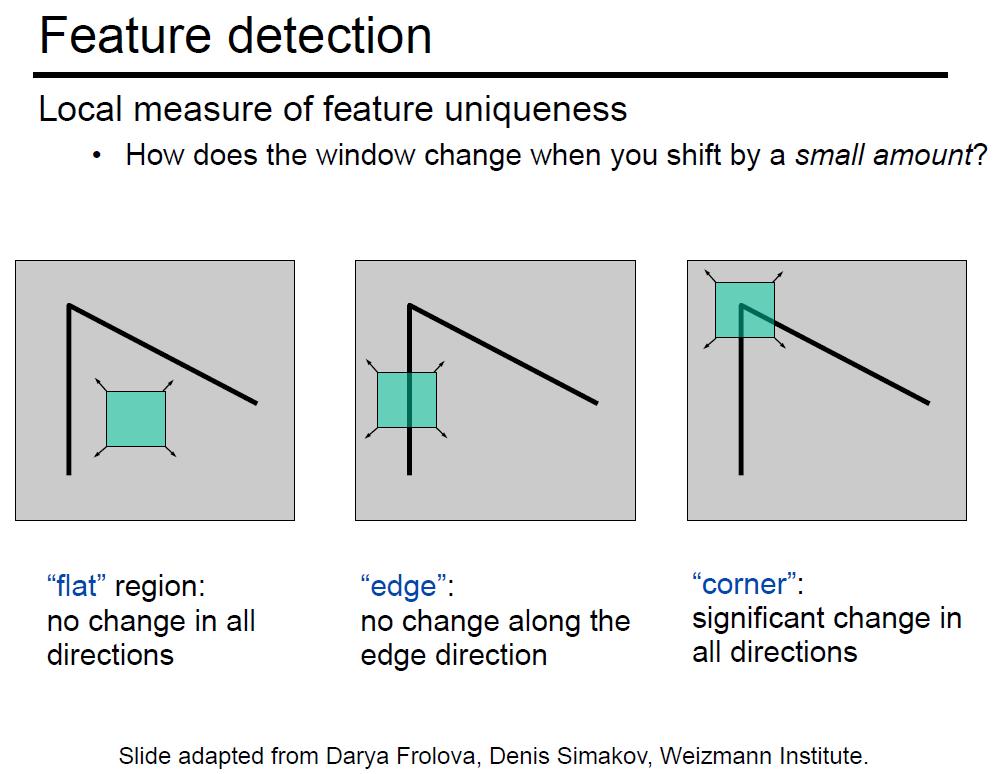
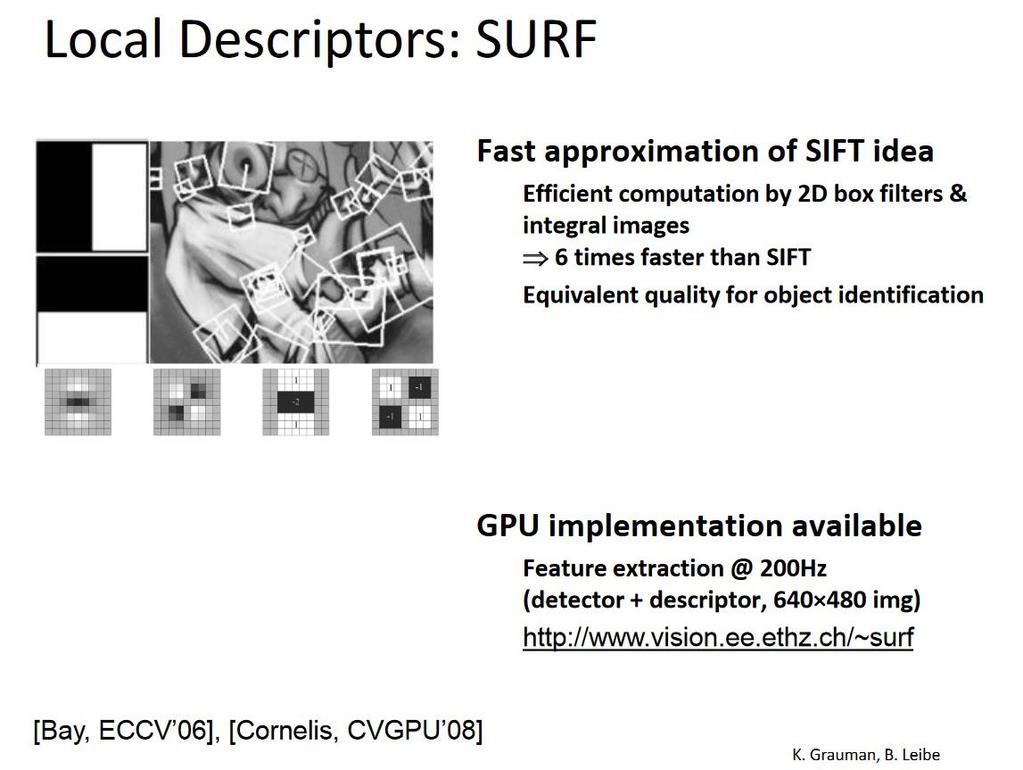
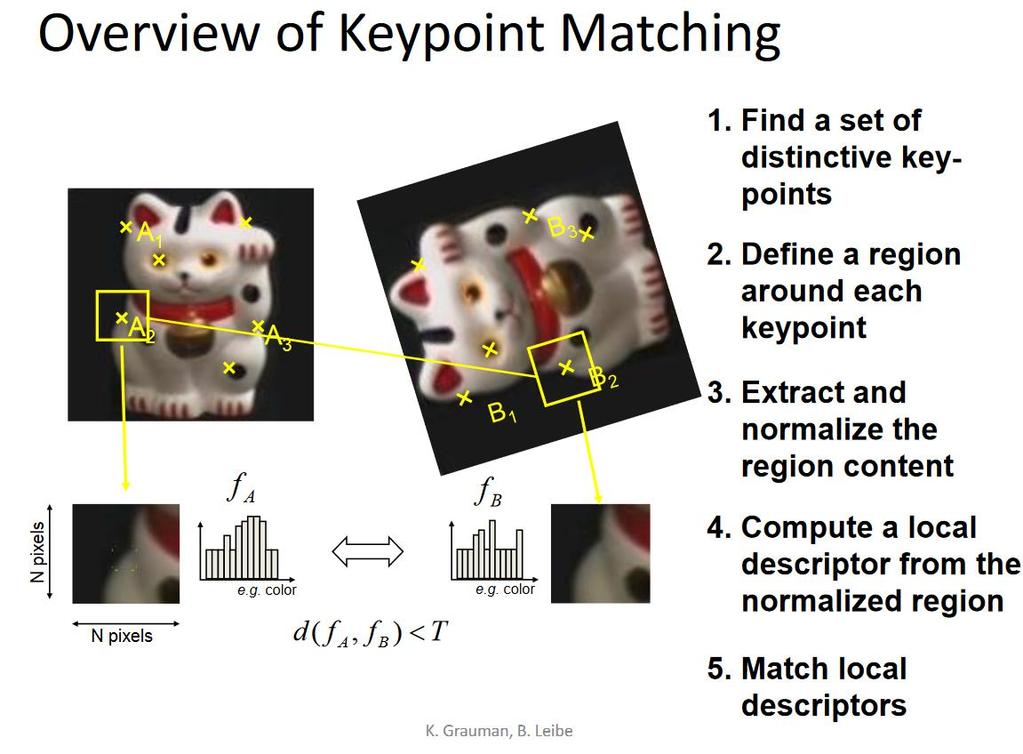
41 Basic underlying component in many of these problems: keypoint detection and matching across images
42
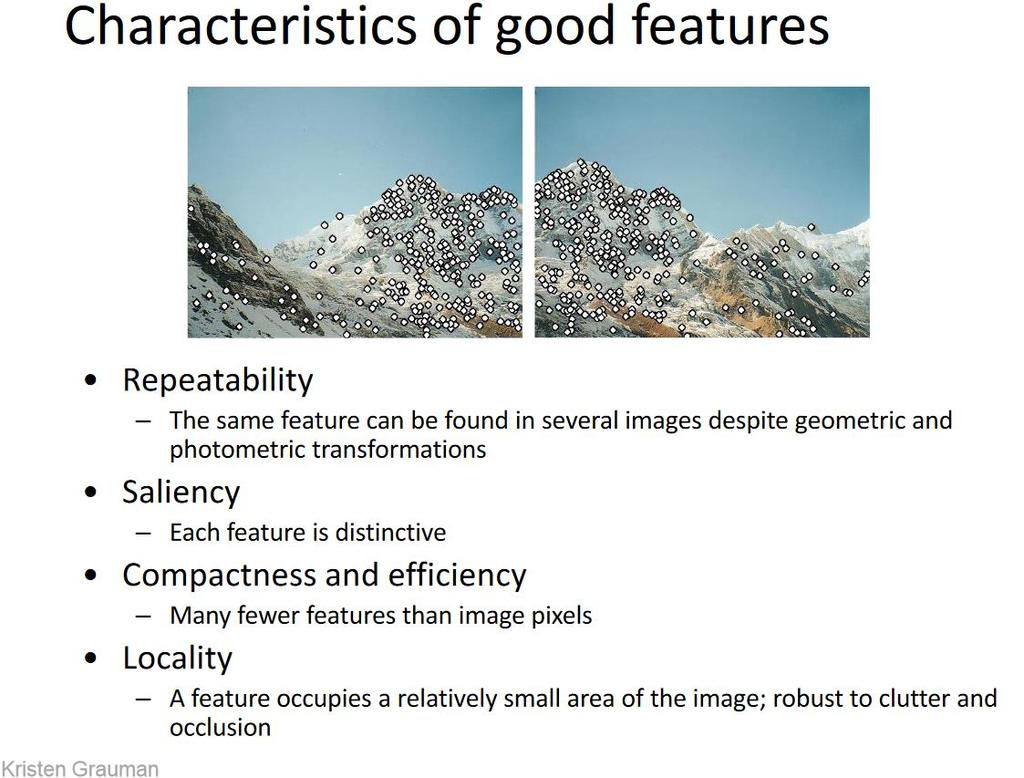
43 Ideally, we want the descriptor to be invariant (i.e. little to no change) when there are - viewpoint changes (small rotation or translation of the camera) - scale-changes - illumination changes
44
45
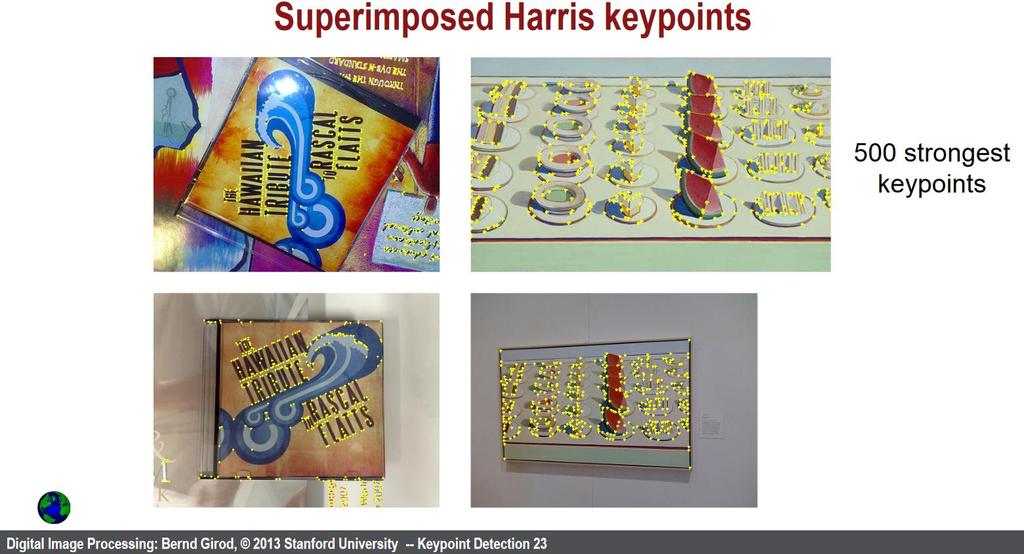
46 Corner detectors Harris FAST Laplacian of Gaussian detector SUSAN Forstner
47
")
48 Scale-space representation Feature detection: search for corners /keypoints across many scales, and return a list of (x, y, scale) keypoints
49
50
51
52
53
54 Many other local descriptors ORB BRIEF FREAK RootSIFT-PCA

55 Feature matching
56
57 Structure from Motion How can we estimate both 3D point positions and the relative camera transformations? Sometimes also called bundle adjustment Q: Why is it different than SLAM?
58 Structure from Motion How can we estimate both 3D point positions and the relative camera transformations? Sometimes also called bundle adjustment Q: Why is it different than SLAM? A: SLAM potentially includes - loop closure - dynamics constraints - velocities, accelerations

59 Loop Closure in Visual SLAM ORB-SLAM, Mur-Artal, Tardos, Montiel, Galvez-Lopez
60 Bundler (bundle adjustment/structure from motion)
61 Structure from Motion as Least Squares Indicates the frame of the k-th camera.
62 Structure from Motion as Least Squares Actual pixel measurement of 3D point from camera k Expected pixel projection of 3D point onto camera k
63 Structure from Motion as Least Squares
Bayes Filter Reminder. Kalman Filter Localization. Properties of Gaussians. Gaussians. Prediction. Correction. σ 2. Univariate. 1 2πσ e.
 Kalman Filter Localization Bayes Filter Reminder Prediction Correction Gaussians p(x) ~ N(µ,σ 2 ) : Properties of Gaussians Univariate p(x) = 1 1 2πσ e 2 (x µ) 2 σ 2 µ Univariate -σ σ Multivariate µ Multivariate
Kalman Filter Localization Bayes Filter Reminder Prediction Correction Gaussians p(x) ~ N(µ,σ 2 ) : Properties of Gaussians Univariate p(x) = 1 1 2πσ e 2 (x µ) 2 σ 2 µ Univariate -σ σ Multivariate µ Multivariate
L11. EKF SLAM: PART I. NA568 Mobile Robotics: Methods & Algorithms
 L11. EKF SLAM: PART I NA568 Mobile Robotics: Methods & Algorithms Today s Topic EKF Feature-Based SLAM State Representation Process / Observation Models Landmark Initialization Robot-Landmark Correlation
L11. EKF SLAM: PART I NA568 Mobile Robotics: Methods & Algorithms Today s Topic EKF Feature-Based SLAM State Representation Process / Observation Models Landmark Initialization Robot-Landmark Correlation
2D Image Processing (Extended) Kalman and particle filter
 Kalman and particle filter") 2D Image Processing (Extended) Kalman and particle filter Prof. Didier Stricker Dr. Gabriele Bleser Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz
2D Image Processing (Extended) Kalman and particle filter Prof. Didier Stricker Dr. Gabriele Bleser Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz
SLAM Techniques and Algorithms. Jack Collier. Canada. Recherche et développement pour la défense Canada. Defence Research and Development Canada
 SLAM Techniques and Algorithms Jack Collier Defence Research and Development Canada Recherche et développement pour la défense Canada Canada Goals What will we learn Gain an appreciation for what SLAM
SLAM Techniques and Algorithms Jack Collier Defence Research and Development Canada Recherche et développement pour la défense Canada Canada Goals What will we learn Gain an appreciation for what SLAM
Mobile Robot Localization
 Mobile Robot Localization 1 The Problem of Robot Localization Given a map of the environment, how can a robot determine its pose (planar coordinates + orientation)? Two sources of uncertainty: - observations
Mobile Robot Localization 1 The Problem of Robot Localization Given a map of the environment, how can a robot determine its pose (planar coordinates + orientation)? Two sources of uncertainty: - observations
Introduction to Mobile Robotics SLAM: Simultaneous Localization and Mapping
 Introduction to Mobile Robotics SLAM: Simultaneous Localization and Mapping Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz What is SLAM? Estimate the pose of a robot and the map of the environment
Introduction to Mobile Robotics SLAM: Simultaneous Localization and Mapping Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz What is SLAM? Estimate the pose of a robot and the map of the environment
Mobile Robot Localization
 Mobile Robot Localization 1 The Problem of Robot Localization Given a map of the environment, how can a robot determine its pose (planar coordinates + orientation)? Two sources of uncertainty: - observations
Mobile Robot Localization 1 The Problem of Robot Localization Given a map of the environment, how can a robot determine its pose (planar coordinates + orientation)? Two sources of uncertainty: - observations
Autonomous Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 6.2: Kalman Filter Jürgen Sturm Technische Universität München Motivation Bayes filter is a useful tool for state
Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 6.2: Kalman Filter Jürgen Sturm Technische Universität München Motivation Bayes filter is a useful tool for state
Robotics. Mobile Robotics. Marc Toussaint U Stuttgart
 Robotics Mobile Robotics State estimation, Bayes filter, odometry, particle filter, Kalman filter, SLAM, joint Bayes filter, EKF SLAM, particle SLAM, graph-based SLAM Marc Toussaint U Stuttgart DARPA Grand
Robotics Mobile Robotics State estimation, Bayes filter, odometry, particle filter, Kalman filter, SLAM, joint Bayes filter, EKF SLAM, particle SLAM, graph-based SLAM Marc Toussaint U Stuttgart DARPA Grand
CIS 390 Fall 2016 Robotics: Planning and Perception Final Review Questions
 CIS 390 Fall 2016 Robotics: Planning and Perception Final Review Questions December 14, 2016 Questions Throughout the following questions we will assume that x t is the state vector at time t, z t is the
CIS 390 Fall 2016 Robotics: Planning and Perception Final Review Questions December 14, 2016 Questions Throughout the following questions we will assume that x t is the state vector at time t, z t is the
2D Image Processing. Bayes filter implementation: Kalman filter
 2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
Robot Localization and Kalman Filters
 Robot Localization and Kalman Filters Rudy Negenborn rudy@negenborn.net August 26, 2003 Outline Robot Localization Probabilistic Localization Kalman Filters Kalman Localization Kalman Localization with
Robot Localization and Kalman Filters Rudy Negenborn rudy@negenborn.net August 26, 2003 Outline Robot Localization Probabilistic Localization Kalman Filters Kalman Localization Kalman Localization with
EKF, UKF. Pieter Abbeel UC Berkeley EECS. Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics
 EKF, UKF Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Kalman Filter Kalman Filter = special case of a Bayes filter with dynamics model and sensory
EKF, UKF Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Kalman Filter Kalman Filter = special case of a Bayes filter with dynamics model and sensory
Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization
 Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras 1 Motivation Recall: Discrete filter Discretize the
Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras 1 Motivation Recall: Discrete filter Discretize the
EKF, UKF. Pieter Abbeel UC Berkeley EECS. Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics
 EKF, UKF Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Kalman Filter Kalman Filter = special case of a Bayes filter with dynamics model and sensory
EKF, UKF Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Kalman Filter Kalman Filter = special case of a Bayes filter with dynamics model and sensory
Particle Filters; Simultaneous Localization and Mapping (Intelligent Autonomous Robotics) Subramanian Ramamoorthy School of Informatics
 Subramanian Ramamoorthy School of Informatics") Particle Filters; Simultaneous Localization and Mapping (Intelligent Autonomous Robotics) Subramanian Ramamoorthy School of Informatics Recap: State Estimation using Kalman Filter Project state and error
Particle Filters; Simultaneous Localization and Mapping (Intelligent Autonomous Robotics) Subramanian Ramamoorthy School of Informatics Recap: State Estimation using Kalman Filter Project state and error
Probabilistic Fundamentals in Robotics. DAUIN Politecnico di Torino July 2010
 Probabilistic Fundamentals in Robotics Probabilistic Models of Mobile Robots Robotic mapping Basilio Bona DAUIN Politecnico di Torino July 2010 Course Outline Basic mathematical framework Probabilistic
Probabilistic Fundamentals in Robotics Probabilistic Models of Mobile Robots Robotic mapping Basilio Bona DAUIN Politecnico di Torino July 2010 Course Outline Basic mathematical framework Probabilistic
2D Image Processing. Bayes filter implementation: Kalman filter
 2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Dr. Gabriele Bleser Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche
2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Dr. Gabriele Bleser Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Probabilistic Fundamentals in Robotics Gaussian Filters Course Outline Basic mathematical framework Probabilistic models of mobile robots Mobile
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Probabilistic Fundamentals in Robotics Gaussian Filters Course Outline Basic mathematical framework Probabilistic models of mobile robots Mobile
Modeling and state estimation Examples State estimation Probabilities Bayes filter Particle filter. Modeling. CSC752 Autonomous Robotic Systems
 Modeling CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami February 21, 2017 Outline 1 Modeling and state estimation 2 Examples 3 State estimation 4 Probabilities
Modeling CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami February 21, 2017 Outline 1 Modeling and state estimation 2 Examples 3 State estimation 4 Probabilities
Simultaneous Localization and Mapping
 Simultaneous Localization and Mapping Miroslav Kulich Intelligent and Mobile Robotics Group Czech Institute of Informatics, Robotics and Cybernetics Czech Technical University in Prague Winter semester
Simultaneous Localization and Mapping Miroslav Kulich Intelligent and Mobile Robotics Group Czech Institute of Informatics, Robotics and Cybernetics Czech Technical University in Prague Winter semester
AUTOMOTIVE ENVIRONMENT SENSORS
 AUTOMOTIVE ENVIRONMENT SENSORS Lecture 5. Localization BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Related concepts Concepts related to vehicles moving
AUTOMOTIVE ENVIRONMENT SENSORS Lecture 5. Localization BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Related concepts Concepts related to vehicles moving
Localization. Howie Choset Adapted from slides by Humphrey Hu, Trevor Decker, and Brad Neuman
 Localization Howie Choset Adapted from slides by Humphrey Hu, Trevor Decker, and Brad Neuman Localization General robotic task Where am I? Techniques generalize to many estimation tasks System parameter
Localization Howie Choset Adapted from slides by Humphrey Hu, Trevor Decker, and Brad Neuman Localization General robotic task Where am I? Techniques generalize to many estimation tasks System parameter
Introduction to Unscented Kalman Filter
 Introduction to Unscented Kalman Filter 1 Introdution In many scientific fields, we use certain models to describe the dynamics of system, such as mobile robot, vision tracking and so on. The word dynamics
Introduction to Unscented Kalman Filter 1 Introdution In many scientific fields, we use certain models to describe the dynamics of system, such as mobile robot, vision tracking and so on. The word dynamics
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: Extended Kalman Filter Dr. Kostas Alexis (CSE) These slides relied on the lectures from C. Stachniss, J. Sturm and the book Probabilistic Robotics from Thurn et al.
Autonomous Mobile Robot Design Topic: Extended Kalman Filter Dr. Kostas Alexis (CSE) These slides relied on the lectures from C. Stachniss, J. Sturm and the book Probabilistic Robotics from Thurn et al.
CS491/691: Introduction to Aerial Robotics
 CS491/691: Introduction to Aerial Robotics Topic: State Estimation Dr. Kostas Alexis (CSE) World state (or system state) Belief state: Our belief/estimate of the world state World state: Real state of
CS491/691: Introduction to Aerial Robotics Topic: State Estimation Dr. Kostas Alexis (CSE) World state (or system state) Belief state: Our belief/estimate of the world state World state: Real state of
Using the Kalman Filter for SLAM AIMS 2015
 Using the Kalman Filter for SLAM AIMS 2015 Contents Trivial Kinematics Rapid sweep over localisation and mapping (components of SLAM) Basic EKF Feature Based SLAM Feature types and representations Implementation
Using the Kalman Filter for SLAM AIMS 2015 Contents Trivial Kinematics Rapid sweep over localisation and mapping (components of SLAM) Basic EKF Feature Based SLAM Feature types and representations Implementation
Introduction to Mobile Robotics Probabilistic Robotics
 Introduction to Mobile Robotics Probabilistic Robotics Wolfram Burgard 1 Probabilistic Robotics Key idea: Explicit representation of uncertainty (using the calculus of probability theory) Perception Action
Introduction to Mobile Robotics Probabilistic Robotics Wolfram Burgard 1 Probabilistic Robotics Key idea: Explicit representation of uncertainty (using the calculus of probability theory) Perception Action
L06. LINEAR KALMAN FILTERS. NA568 Mobile Robotics: Methods & Algorithms
 L06. LINEAR KALMAN FILTERS NA568 Mobile Robotics: Methods & Algorithms 2 PS2 is out! Landmark-based Localization: EKF, UKF, PF Today s Lecture Minimum Mean Square Error (MMSE) Linear Kalman Filter Gaussian
L06. LINEAR KALMAN FILTERS NA568 Mobile Robotics: Methods & Algorithms 2 PS2 is out! Landmark-based Localization: EKF, UKF, PF Today s Lecture Minimum Mean Square Error (MMSE) Linear Kalman Filter Gaussian
L03. PROBABILITY REVIEW II COVARIANCE PROJECTION. NA568 Mobile Robotics: Methods & Algorithms
 L03. PROBABILITY REVIEW II COVARIANCE PROJECTION NA568 Mobile Robotics: Methods & Algorithms Today s Agenda State Representation and Uncertainty Multivariate Gaussian Covariance Projection Probabilistic
L03. PROBABILITY REVIEW II COVARIANCE PROJECTION NA568 Mobile Robotics: Methods & Algorithms Today s Agenda State Representation and Uncertainty Multivariate Gaussian Covariance Projection Probabilistic
Probabilistic Fundamentals in Robotics. DAUIN Politecnico di Torino July 2010
 Probabilistic Fundamentals in Robotics Gaussian Filters Basilio Bona DAUIN Politecnico di Torino July 2010 Course Outline Basic mathematical framework Probabilistic models of mobile robots Mobile robot
Probabilistic Fundamentals in Robotics Gaussian Filters Basilio Bona DAUIN Politecnico di Torino July 2010 Course Outline Basic mathematical framework Probabilistic models of mobile robots Mobile robot
Robotics 2 Target Tracking. Kai Arras, Cyrill Stachniss, Maren Bennewitz, Wolfram Burgard
 Robotics 2 Target Tracking Kai Arras, Cyrill Stachniss, Maren Bennewitz, Wolfram Burgard Slides by Kai Arras, Gian Diego Tipaldi, v.1.1, Jan 2012 Chapter Contents Target Tracking Overview Applications
Robotics 2 Target Tracking Kai Arras, Cyrill Stachniss, Maren Bennewitz, Wolfram Burgard Slides by Kai Arras, Gian Diego Tipaldi, v.1.1, Jan 2012 Chapter Contents Target Tracking Overview Applications
Kalman filtering and friends: Inference in time series models. Herke van Hoof slides mostly by Michael Rubinstein
 Kalman filtering and friends: Inference in time series models Herke van Hoof slides mostly by Michael Rubinstein Problem overview Goal Estimate most probable state at time k using measurement up to time
Kalman filtering and friends: Inference in time series models Herke van Hoof slides mostly by Michael Rubinstein Problem overview Goal Estimate most probable state at time k using measurement up to time
TSRT14: Sensor Fusion Lecture 9
 TSRT14: Sensor Fusion Lecture 9 Simultaneous localization and mapping (SLAM) Gustaf Hendeby gustaf.hendeby@liu.se TSRT14 Lecture 9 Gustaf Hendeby Spring 2018 1 / 28 Le 9: simultaneous localization and
TSRT14: Sensor Fusion Lecture 9 Simultaneous localization and mapping (SLAM) Gustaf Hendeby gustaf.hendeby@liu.se TSRT14 Lecture 9 Gustaf Hendeby Spring 2018 1 / 28 Le 9: simultaneous localization and
Introduction to Mobile Robotics Bayes Filter Kalman Filter
 Introduction to Mobile Robotics Bayes Filter Kalman Filter Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Giorgio Grisetti, Kai Arras 1 Bayes Filter Reminder 1. Algorithm Bayes_filter( Bel(x),d ):
Introduction to Mobile Robotics Bayes Filter Kalman Filter Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Giorgio Grisetti, Kai Arras 1 Bayes Filter Reminder 1. Algorithm Bayes_filter( Bel(x),d ):
ESTIMATOR STABILITY ANALYSIS IN SLAM. Teresa Vidal-Calleja, Juan Andrade-Cetto, Alberto Sanfeliu
 ESTIMATOR STABILITY ANALYSIS IN SLAM Teresa Vidal-Calleja, Juan Andrade-Cetto, Alberto Sanfeliu Institut de Robtica i Informtica Industrial, UPC-CSIC Llorens Artigas 4-6, Barcelona, 88 Spain {tvidal, cetto,
ESTIMATOR STABILITY ANALYSIS IN SLAM Teresa Vidal-Calleja, Juan Andrade-Cetto, Alberto Sanfeliu Institut de Robtica i Informtica Industrial, UPC-CSIC Llorens Artigas 4-6, Barcelona, 88 Spain {tvidal, cetto,
Computer Vision Group Prof. Daniel Cremers. 14. Sampling Methods
 Prof. Daniel Cremers 14. Sampling Methods Sampling Methods Sampling Methods are widely used in Computer Science as an approximation of a deterministic algorithm to represent uncertainty without a parametric
Prof. Daniel Cremers 14. Sampling Methods Sampling Methods Sampling Methods are widely used in Computer Science as an approximation of a deterministic algorithm to represent uncertainty without a parametric
Robot Localisation. Henrik I. Christensen. January 12, 2007
 Robot Henrik I. Robotics and Intelligent Machines @ GT College of Computing Georgia Institute of Technology Atlanta, GA hic@cc.gatech.edu January 12, 2007 The Robot Structure Outline 1 2 3 4 Sum of 5 6
Robot Henrik I. Robotics and Intelligent Machines @ GT College of Computing Georgia Institute of Technology Atlanta, GA hic@cc.gatech.edu January 12, 2007 The Robot Structure Outline 1 2 3 4 Sum of 5 6
Simultaneous Localization and Mapping (SLAM) Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo") Simultaneous Localization and Mapping (SLAM) Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Introduction SLAM asks the following question: Is it possible for an autonomous vehicle
Simultaneous Localization and Mapping (SLAM) Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Introduction SLAM asks the following question: Is it possible for an autonomous vehicle
Computer Vision Group Prof. Daniel Cremers. 11. Sampling Methods
 Prof. Daniel Cremers 11. Sampling Methods Sampling Methods Sampling Methods are widely used in Computer Science as an approximation of a deterministic algorithm to represent uncertainty without a parametric
Prof. Daniel Cremers 11. Sampling Methods Sampling Methods Sampling Methods are widely used in Computer Science as an approximation of a deterministic algorithm to represent uncertainty without a parametric
Vlad Estivill-Castro. Robots for People --- A project for intelligent integrated systems
 1 Vlad Estivill-Castro Robots for People --- A project for intelligent integrated systems V. Estivill-Castro 2 Probabilistic Map-based Localization (Kalman Filter) Chapter 5 (textbook) Based on textbook
1 Vlad Estivill-Castro Robots for People --- A project for intelligent integrated systems V. Estivill-Castro 2 Probabilistic Map-based Localization (Kalman Filter) Chapter 5 (textbook) Based on textbook
Introduction to Mobile Robotics Information Gain-Based Exploration. Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Giorgio Grisetti, Kai Arras
 Introduction to Mobile Robotics Information Gain-Based Exploration Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Giorgio Grisetti, Kai Arras 1 Tasks of Mobile Robots mapping SLAM localization integrated
Introduction to Mobile Robotics Information Gain-Based Exploration Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Giorgio Grisetti, Kai Arras 1 Tasks of Mobile Robots mapping SLAM localization integrated
TSRT14: Sensor Fusion Lecture 8
 TSRT14: Sensor Fusion Lecture 8 Particle filter theory Marginalized particle filter Gustaf Hendeby gustaf.hendeby@liu.se TSRT14 Lecture 8 Gustaf Hendeby Spring 2018 1 / 25 Le 8: particle filter theory,
TSRT14: Sensor Fusion Lecture 8 Particle filter theory Marginalized particle filter Gustaf Hendeby gustaf.hendeby@liu.se TSRT14 Lecture 8 Gustaf Hendeby Spring 2018 1 / 25 Le 8: particle filter theory,
1 Kalman Filter Introduction
 1 Kalman Filter Introduction You should first read Chapter 1 of Stochastic models, estimation, and control: Volume 1 by Peter S. Maybec (available here). 1.1 Explanation of Equations (1-3) and (1-4) Equation
1 Kalman Filter Introduction You should first read Chapter 1 of Stochastic models, estimation, and control: Volume 1 by Peter S. Maybec (available here). 1.1 Explanation of Equations (1-3) and (1-4) Equation
Probabilistic Fundamentals in Robotics. DAUIN Politecnico di Torino July 2010
 Probabilistic Fundamentals in Robotics Probabilistic Models of Mobile Robots Robot localization Basilio Bona DAUIN Politecnico di Torino July 2010 Course Outline Basic mathematical framework Probabilistic
Probabilistic Fundamentals in Robotics Probabilistic Models of Mobile Robots Robot localization Basilio Bona DAUIN Politecnico di Torino July 2010 Course Outline Basic mathematical framework Probabilistic
Probabilistic Fundamentals in Robotics
 Probabilistic Fundamentals in Robotics Probabilistic Models of Mobile Robots Robot localization Basilio Bona DAUIN Politecnico di Torino June 2011 Course Outline Basic mathematical framework Probabilistic
Probabilistic Fundamentals in Robotics Probabilistic Models of Mobile Robots Robot localization Basilio Bona DAUIN Politecnico di Torino June 2011 Course Outline Basic mathematical framework Probabilistic
ECE276A: Sensing & Estimation in Robotics Lecture 10: Gaussian Mixture and Particle Filtering
 ECE276A: Sensing & Estimation in Robotics Lecture 10: Gaussian Mixture and Particle Filtering Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Siwei Guo: s9guo@eng.ucsd.edu Anwesan Pal:
ECE276A: Sensing & Estimation in Robotics Lecture 10: Gaussian Mixture and Particle Filtering Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Siwei Guo: s9guo@eng.ucsd.edu Anwesan Pal:
Lecture 8: Interest Point Detection. Saad J Bedros
 #1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Review of Edge Detectors #2 Today s Lecture Interest Points Detection What do we mean with Interest Point Detection in an Image Goal:
#1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Review of Edge Detectors #2 Today s Lecture Interest Points Detection What do we mean with Interest Point Detection in an Image Goal:
Dynamic models 1 Kalman filters, linearization,
 Koller & Friedman: Chapter 16 Jordan: Chapters 13, 15 Uri Lerner s Thesis: Chapters 3,9 Dynamic models 1 Kalman filters, linearization, Switching KFs, Assumed density filters Probabilistic Graphical Models
Koller & Friedman: Chapter 16 Jordan: Chapters 13, 15 Uri Lerner s Thesis: Chapters 3,9 Dynamic models 1 Kalman filters, linearization, Switching KFs, Assumed density filters Probabilistic Graphical Models
Rao-Blackwellized Particle Filtering for 6-DOF Estimation of Attitude and Position via GPS and Inertial Sensors
 Rao-Blackwellized Particle Filtering for 6-DOF Estimation of Attitude and Position via GPS and Inertial Sensors GRASP Laboratory University of Pennsylvania June 6, 06 Outline Motivation Motivation 3 Problem
Rao-Blackwellized Particle Filtering for 6-DOF Estimation of Attitude and Position via GPS and Inertial Sensors GRASP Laboratory University of Pennsylvania June 6, 06 Outline Motivation Motivation 3 Problem
9 Multi-Model State Estimation
 Technion Israel Institute of Technology, Department of Electrical Engineering Estimation and Identification in Dynamical Systems (048825) Lecture Notes, Fall 2009, Prof. N. Shimkin 9 Multi-Model State
Technion Israel Institute of Technology, Department of Electrical Engineering Estimation and Identification in Dynamical Systems (048825) Lecture Notes, Fall 2009, Prof. N. Shimkin 9 Multi-Model State
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: Particle Filter for Localization Dr. Kostas Alexis (CSE) These slides relied on the lectures from C. Stachniss, and the book Probabilistic Robotics from Thurn et al.
Autonomous Mobile Robot Design Topic: Particle Filter for Localization Dr. Kostas Alexis (CSE) These slides relied on the lectures from C. Stachniss, and the book Probabilistic Robotics from Thurn et al.
Particle Filters. Outline
 Particle Filters M. Sami Fadali Professor of EE University of Nevada Outline Monte Carlo integration. Particle filter. Importance sampling. Degeneracy Resampling Example. 1 2 Monte Carlo Integration Numerical
Particle Filters M. Sami Fadali Professor of EE University of Nevada Outline Monte Carlo integration. Particle filter. Importance sampling. Degeneracy Resampling Example. 1 2 Monte Carlo Integration Numerical
PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 13: SEQUENTIAL DATA
 PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 13: SEQUENTIAL DATA Contents in latter part Linear Dynamical Systems What is different from HMM? Kalman filter Its strength and limitation Particle Filter
PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 13: SEQUENTIAL DATA Contents in latter part Linear Dynamical Systems What is different from HMM? Kalman filter Its strength and limitation Particle Filter
Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems
 Robots for People --- A project for intelligent integrated systems") 1 Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems V. Estivill-Castro 2 Perception Concepts Vision Chapter 4 (textbook) Sections 4.3 to 4.5 What is the course
1 Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems V. Estivill-Castro 2 Perception Concepts Vision Chapter 4 (textbook) Sections 4.3 to 4.5 What is the course
From Bayes to Extended Kalman Filter
 From Bayes to Extended Kalman Filter Michal Reinštein Czech Technical University in Prague Faculty of Electrical Engineering, Department of Cybernetics Center for Machine Perception http://cmp.felk.cvut.cz/
From Bayes to Extended Kalman Filter Michal Reinštein Czech Technical University in Prague Faculty of Electrical Engineering, Department of Cybernetics Center for Machine Perception http://cmp.felk.cvut.cz/
Robotics. Lecture 4: Probabilistic Robotics. See course website for up to date information.
 Robotics Lecture 4: Probabilistic Robotics See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College London Review: Sensors
Robotics Lecture 4: Probabilistic Robotics See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College London Review: Sensors
COS Lecture 16 Autonomous Robot Navigation
 COS 495 - Lecture 16 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
COS 495 - Lecture 16 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
Corners, Blobs & Descriptors. With slides from S. Lazebnik & S. Seitz, D. Lowe, A. Efros
 Corners, Blobs & Descriptors With slides from S. Lazebnik & S. Seitz, D. Lowe, A. Efros Motivation: Build a Panorama M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 How do we build panorama?
Corners, Blobs & Descriptors With slides from S. Lazebnik & S. Seitz, D. Lowe, A. Efros Motivation: Build a Panorama M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 How do we build panorama?
Sensor Fusion: Particle Filter
 Sensor Fusion: Particle Filter By: Gordana Stojceska stojcesk@in.tum.de Outline Motivation Applications Fundamentals Tracking People Advantages and disadvantages Summary June 05 JASS '05, St.Petersburg,
Sensor Fusion: Particle Filter By: Gordana Stojceska stojcesk@in.tum.de Outline Motivation Applications Fundamentals Tracking People Advantages and disadvantages Summary June 05 JASS '05, St.Petersburg,
Robotics 2 Target Tracking. Giorgio Grisetti, Cyrill Stachniss, Kai Arras, Wolfram Burgard
 Robotics 2 Target Tracking Giorgio Grisetti, Cyrill Stachniss, Kai Arras, Wolfram Burgard Linear Dynamical System (LDS) Stochastic process governed by is the state vector is the input vector is the process
Robotics 2 Target Tracking Giorgio Grisetti, Cyrill Stachniss, Kai Arras, Wolfram Burgard Linear Dynamical System (LDS) Stochastic process governed by is the state vector is the input vector is the process
The Particle Filter. PD Dr. Rudolph Triebel Computer Vision Group. Machine Learning for Computer Vision
 The Particle Filter Non-parametric implementation of Bayes filter Represents the belief (posterior) random state samples. by a set of This representation is approximate. Can represent distributions that
The Particle Filter Non-parametric implementation of Bayes filter Represents the belief (posterior) random state samples. by a set of This representation is approximate. Can represent distributions that
Partially Observable Markov Decision Processes (POMDPs)
") Partially Observable Markov Decision Processes (POMDPs) Sachin Patil Guest Lecture: CS287 Advanced Robotics Slides adapted from Pieter Abbeel, Alex Lee Outline Introduction to POMDPs Locally Optimal Solutions
Partially Observable Markov Decision Processes (POMDPs) Sachin Patil Guest Lecture: CS287 Advanced Robotics Slides adapted from Pieter Abbeel, Alex Lee Outline Introduction to POMDPs Locally Optimal Solutions
E190Q Lecture 10 Autonomous Robot Navigation
 E190Q Lecture 10 Autonomous Robot Navigation Instructor: Chris Clark Semester: Spring 2015 1 Figures courtesy of Siegwart & Nourbakhsh Kilobots 2 https://www.youtube.com/watch?v=2ialuwgafd0 Control Structures
E190Q Lecture 10 Autonomous Robot Navigation Instructor: Chris Clark Semester: Spring 2015 1 Figures courtesy of Siegwart & Nourbakhsh Kilobots 2 https://www.youtube.com/watch?v=2ialuwgafd0 Control Structures
L09. PARTICLE FILTERING. NA568 Mobile Robotics: Methods & Algorithms
 L09. PARTICLE FILTERING NA568 Mobile Robotics: Methods & Algorithms Particle Filters Different approach to state estimation Instead of parametric description of state (and uncertainty), use a set of state
L09. PARTICLE FILTERING NA568 Mobile Robotics: Methods & Algorithms Particle Filters Different approach to state estimation Instead of parametric description of state (and uncertainty), use a set of state
Recursive Bayes Filtering
 Recursive Bayes Filtering CS485 Autonomous Robotics Amarda Shehu Fall 2013 Notes modified from Wolfram Burgard, University of Freiburg Physical Agents are Inherently Uncertain Uncertainty arises from four
Recursive Bayes Filtering CS485 Autonomous Robotics Amarda Shehu Fall 2013 Notes modified from Wolfram Burgard, University of Freiburg Physical Agents are Inherently Uncertain Uncertainty arises from four
A Comparison of the EKF, SPKF, and the Bayes Filter for Landmark-Based Localization
 A Comparison of the EKF, SPKF, and the Bayes Filter for Landmark-Based Localization and Timothy D. Barfoot CRV 2 Outline Background Objective Experimental Setup Results Discussion Conclusion 2 Outline
A Comparison of the EKF, SPKF, and the Bayes Filter for Landmark-Based Localization and Timothy D. Barfoot CRV 2 Outline Background Objective Experimental Setup Results Discussion Conclusion 2 Outline
CS 532: 3D Computer Vision 6 th Set of Notes
 1 CS 532: 3D Computer Vision 6 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Lecture Outline Intro to Covariance
1 CS 532: 3D Computer Vision 6 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Lecture Outline Intro to Covariance
Kalman Filter. Predict: Update: x k k 1 = F k x k 1 k 1 + B k u k P k k 1 = F k P k 1 k 1 F T k + Q
 Kalman Filter Kalman Filter Predict: x k k 1 = F k x k 1 k 1 + B k u k P k k 1 = F k P k 1 k 1 F T k + Q Update: K = P k k 1 Hk T (H k P k k 1 Hk T + R) 1 x k k = x k k 1 + K(z k H k x k k 1 ) P k k =(I
Kalman Filter Kalman Filter Predict: x k k 1 = F k x k 1 k 1 + B k u k P k k 1 = F k P k 1 k 1 F T k + Q Update: K = P k k 1 Hk T (H k P k k 1 Hk T + R) 1 x k k = x k k 1 + K(z k H k x k k 1 ) P k k =(I
Mobile Robotics II: Simultaneous localization and mapping
 Mobile Robotics II: Simultaneous localization and mapping Introduction: probability theory, estimation Miroslav Kulich Intelligent and Mobile Robotics Group Gerstner Laboratory for Intelligent Decision
Mobile Robotics II: Simultaneous localization and mapping Introduction: probability theory, estimation Miroslav Kulich Intelligent and Mobile Robotics Group Gerstner Laboratory for Intelligent Decision
Markov localization uses an explicit, discrete representation for the probability of all position in the state space.
 Markov Kalman Filter Localization Markov localization localization starting from any unknown position recovers from ambiguous situation. However, to update the probability of all positions within the whole
Markov Kalman Filter Localization Markov localization localization starting from any unknown position recovers from ambiguous situation. However, to update the probability of all positions within the whole
Lecture 2: From Linear Regression to Kalman Filter and Beyond
 Lecture 2: From Linear Regression to Kalman Filter and Beyond January 18, 2017 Contents 1 Batch and Recursive Estimation 2 Towards Bayesian Filtering 3 Kalman Filter and Bayesian Filtering and Smoothing
Lecture 2: From Linear Regression to Kalman Filter and Beyond January 18, 2017 Contents 1 Batch and Recursive Estimation 2 Towards Bayesian Filtering 3 Kalman Filter and Bayesian Filtering and Smoothing
A Study of Covariances within Basic and Extended Kalman Filters
 A Study of Covariances within Basic and Extended Kalman Filters David Wheeler Kyle Ingersoll December 2, 2013 Abstract This paper explores the role of covariance in the context of Kalman filters. The underlying
A Study of Covariances within Basic and Extended Kalman Filters David Wheeler Kyle Ingersoll December 2, 2013 Abstract This paper explores the role of covariance in the context of Kalman filters. The underlying
Overfitting, Bias / Variance Analysis
 Overfitting, Bias / Variance Analysis Professor Ameet Talwalkar Professor Ameet Talwalkar CS260 Machine Learning Algorithms February 8, 207 / 40 Outline Administration 2 Review of last lecture 3 Basic
Overfitting, Bias / Variance Analysis Professor Ameet Talwalkar Professor Ameet Talwalkar CS260 Machine Learning Algorithms February 8, 207 / 40 Outline Administration 2 Review of last lecture 3 Basic
Lecture 7: Optimal Smoothing
 Department of Biomedical Engineering and Computational Science Aalto University March 17, 2011 Contents 1 What is Optimal Smoothing? 2 Bayesian Optimal Smoothing Equations 3 Rauch-Tung-Striebel Smoother
Department of Biomedical Engineering and Computational Science Aalto University March 17, 2011 Contents 1 What is Optimal Smoothing? 2 Bayesian Optimal Smoothing Equations 3 Rauch-Tung-Striebel Smoother
Nonlinear Optimization for Optimal Control Part 2. Pieter Abbeel UC Berkeley EECS. From linear to nonlinear Model-predictive control (MPC) POMDPs
 POMDPs") Nonlinear Optimization for Optimal Control Part 2 Pieter Abbeel UC Berkeley EECS Outline From linear to nonlinear Model-predictive control (MPC) POMDPs Page 1! From Linear to Nonlinear We know how to solve
Nonlinear Optimization for Optimal Control Part 2 Pieter Abbeel UC Berkeley EECS Outline From linear to nonlinear Model-predictive control (MPC) POMDPs Page 1! From Linear to Nonlinear We know how to solve
Local Positioning with Parallelepiped Moving Grid
 Local Positioning with Parallelepiped Moving Grid, WPNC06 16.3.2006, niilo.sirola@tut.fi p. 1/?? TA M P E R E U N I V E R S I T Y O F T E C H N O L O G Y M a t h e m a t i c s Local Positioning with Parallelepiped
Local Positioning with Parallelepiped Moving Grid, WPNC06 16.3.2006, niilo.sirola@tut.fi p. 1/?? TA M P E R E U N I V E R S I T Y O F T E C H N O L O G Y M a t h e m a t i c s Local Positioning with Parallelepiped
System identification and sensor fusion in dynamical systems. Thomas Schön Division of Systems and Control, Uppsala University, Sweden.
 System identification and sensor fusion in dynamical systems Thomas Schön Division of Systems and Control, Uppsala University, Sweden. The system identification and sensor fusion problem Inertial sensors
System identification and sensor fusion in dynamical systems Thomas Schön Division of Systems and Control, Uppsala University, Sweden. The system identification and sensor fusion problem Inertial sensors
Distributed Data Fusion with Kalman Filters. Simon Julier Computer Science Department University College London
 Distributed Data Fusion with Kalman Filters Simon Julier Computer Science Department University College London S.Julier@cs.ucl.ac.uk Structure of Talk Motivation Kalman Filters Double Counting Optimal
Distributed Data Fusion with Kalman Filters Simon Julier Computer Science Department University College London S.Julier@cs.ucl.ac.uk Structure of Talk Motivation Kalman Filters Double Counting Optimal
Lecture 8: Interest Point Detection. Saad J Bedros
 #1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Last Lecture : Edge Detection Preprocessing of image is desired to eliminate or at least minimize noise effects There is always tradeoff
#1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Last Lecture : Edge Detection Preprocessing of image is desired to eliminate or at least minimize noise effects There is always tradeoff
Probabilistic Graphical Models
 Probabilistic Graphical Models Brown University CSCI 2950-P, Spring 2013 Prof. Erik Sudderth Lecture 13: Learning in Gaussian Graphical Models, Non-Gaussian Inference, Monte Carlo Methods Some figures
Probabilistic Graphical Models Brown University CSCI 2950-P, Spring 2013 Prof. Erik Sudderth Lecture 13: Learning in Gaussian Graphical Models, Non-Gaussian Inference, Monte Carlo Methods Some figures
Human Pose Tracking I: Basics. David Fleet University of Toronto
 Human Pose Tracking I: Basics David Fleet University of Toronto CIFAR Summer School, 2009 Looking at People Challenges: Complex pose / motion People have many degrees of freedom, comprising an articulated
Human Pose Tracking I: Basics David Fleet University of Toronto CIFAR Summer School, 2009 Looking at People Challenges: Complex pose / motion People have many degrees of freedom, comprising an articulated
Feature extraction: Corners and blobs
 Feature extraction: Corners and blobs Review: Linear filtering and edge detection Name two different kinds of image noise Name a non-linear smoothing filter What advantages does median filtering have over
Feature extraction: Corners and blobs Review: Linear filtering and edge detection Name two different kinds of image noise Name a non-linear smoothing filter What advantages does median filtering have over
Ensemble Data Assimilation and Uncertainty Quantification
 Ensemble Data Assimilation and Uncertainty Quantification Jeff Anderson National Center for Atmospheric Research pg 1 What is Data Assimilation? Observations combined with a Model forecast + to produce
Ensemble Data Assimilation and Uncertainty Quantification Jeff Anderson National Center for Atmospheric Research pg 1 What is Data Assimilation? Observations combined with a Model forecast + to produce
On the Representation and Estimation of Spatial Uncertainty
 Randall C. Smith* SRI International Medo Park, California 94025 Peter Cheeseman NASA Ames Moffett Field, California 94025 On the Representation and Estimation of Spatial Uncertainty Abstract This paper
Randall C. Smith* SRI International Medo Park, California 94025 Peter Cheeseman NASA Ames Moffett Field, California 94025 On the Representation and Estimation of Spatial Uncertainty Abstract This paper
the robot in its current estimated position and orientation (also include a point at the reference point of the robot)
") CSCI 4190 Introduction to Robotic Algorithms, Spring 006 Assignment : out February 13, due February 3 and March Localization and the extended Kalman filter In this assignment, you will write a program
CSCI 4190 Introduction to Robotic Algorithms, Spring 006 Assignment : out February 13, due February 3 and March Localization and the extended Kalman filter In this assignment, you will write a program
Robots Autónomos. Depto. CCIA. 2. Bayesian Estimation and sensor models. Domingo Gallardo
 Robots Autónomos 2. Bayesian Estimation and sensor models Domingo Gallardo Depto. CCIA http://www.rvg.ua.es/master/robots References Recursive State Estimation: Thrun, chapter 2 Sensor models and robot
Robots Autónomos 2. Bayesian Estimation and sensor models Domingo Gallardo Depto. CCIA http://www.rvg.ua.es/master/robots References Recursive State Estimation: Thrun, chapter 2 Sensor models and robot
Kalman Filter Computer Vision (Kris Kitani) Carnegie Mellon University
 Carnegie Mellon University") Kalman Filter 16-385 Computer Vision (Kris Kitani) Carnegie Mellon University Examples up to now have been discrete (binary) random variables Kalman filtering can be seen as a special case of a temporal
Kalman Filter 16-385 Computer Vision (Kris Kitani) Carnegie Mellon University Examples up to now have been discrete (binary) random variables Kalman filtering can be seen as a special case of a temporal
Consistent Triangulation for Mobile Robot Localization Using Discontinuous Angular Measurements
 Seminar on Mechanical Robotic Systems Centre for Intelligent Machines McGill University Consistent Triangulation for Mobile Robot Localization Using Discontinuous Angular Measurements Josep M. Font Llagunes
Seminar on Mechanical Robotic Systems Centre for Intelligent Machines McGill University Consistent Triangulation for Mobile Robot Localization Using Discontinuous Angular Measurements Josep M. Font Llagunes
CONDENSATION Conditional Density Propagation for Visual Tracking
 CONDENSATION Conditional Density Propagation for Visual Tracking Michael Isard and Andrew Blake Presented by Neil Alldrin Department of Computer Science & Engineering University of California, San Diego
CONDENSATION Conditional Density Propagation for Visual Tracking Michael Isard and Andrew Blake Presented by Neil Alldrin Department of Computer Science & Engineering University of California, San Diego
Why do we care? Measurements. Handling uncertainty over time: predicting, estimating, recognizing, learning. Dealing with time
 Handling uncertainty over time: predicting, estimating, recognizing, learning Chris Atkeson 2004 Why do we care? Speech recognition makes use of dependence of words and phonemes across time. Knowing where
Handling uncertainty over time: predicting, estimating, recognizing, learning Chris Atkeson 2004 Why do we care? Speech recognition makes use of dependence of words and phonemes across time. Knowing where
(W: 12:05-1:50, 50-N201)
") 2015 School of Information Technology and Electrical Engineering at the University of Queensland Schedule Week Date Lecture (W: 12:05-1:50, 50-N201) 1 29-Jul Introduction Representing Position & Orientation
2015 School of Information Technology and Electrical Engineering at the University of Queensland Schedule Week Date Lecture (W: 12:05-1:50, 50-N201) 1 29-Jul Introduction Representing Position & Orientation
Cooperative relative robot localization with audible acoustic sensing
 Cooperative relative robot localization with audible acoustic sensing Yuanqing Lin, Paul Vernaza, Jihun Ham, and Daniel D. Lee GRASP Laboratory, Department of Electrical and Systems Engineering, University
Cooperative relative robot localization with audible acoustic sensing Yuanqing Lin, Paul Vernaza, Jihun Ham, and Daniel D. Lee GRASP Laboratory, Department of Electrical and Systems Engineering, University
Data assimilation in high dimensions
 Data assimilation in high dimensions David Kelly Courant Institute New York University New York NY www.dtbkelly.com February 12, 2015 Graduate seminar, CIMS David Kelly (CIMS) Data assimilation February
Data assimilation in high dimensions David Kelly Courant Institute New York University New York NY www.dtbkelly.com February 12, 2015 Graduate seminar, CIMS David Kelly (CIMS) Data assimilation February
Particle Filters. Pieter Abbeel UC Berkeley EECS. Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics
 Particle Filters Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Motivation For continuous spaces: often no analytical formulas for Bayes filter updates
Particle Filters Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Motivation For continuous spaces: often no analytical formulas for Bayes filter updates
Image Alignment and Mosaicing Feature Tracking and the Kalman Filter
 Image Alignment and Mosaicing Feature Tracking and the Kalman Filter Image Alignment Applications Local alignment: Tracking Stereo Global alignment: Camera jitter elimination Image enhancement Panoramic
Image Alignment and Mosaicing Feature Tracking and the Kalman Filter Image Alignment Applications Local alignment: Tracking Stereo Global alignment: Camera jitter elimination Image enhancement Panoramic
Probabilistic Robotics
 Probabilistic Robotics Overview of probability, Representing uncertainty Propagation of uncertainty, Bayes Rule Application to Localization and Mapping Slides from Autonomous Robots (Siegwart and Nourbaksh),
Probabilistic Robotics Overview of probability, Representing uncertainty Propagation of uncertainty, Bayes Rule Application to Localization and Mapping Slides from Autonomous Robots (Siegwart and Nourbaksh),
Constrained State Estimation Using the Unscented Kalman Filter
 16th Mediterranean Conference on Control and Automation Congress Centre, Ajaccio, France June 25-27, 28 Constrained State Estimation Using the Unscented Kalman Filter Rambabu Kandepu, Lars Imsland and
16th Mediterranean Conference on Control and Automation Congress Centre, Ajaccio, France June 25-27, 28 Constrained State Estimation Using the Unscented Kalman Filter Rambabu Kandepu, Lars Imsland and
Nonlinear and/or Non-normal Filtering. Jesús Fernández-Villaverde University of Pennsylvania
 Nonlinear and/or Non-normal Filtering Jesús Fernández-Villaverde University of Pennsylvania 1 Motivation Nonlinear and/or non-gaussian filtering, smoothing, and forecasting (NLGF) problems are pervasive
Nonlinear and/or Non-normal Filtering Jesús Fernández-Villaverde University of Pennsylvania 1 Motivation Nonlinear and/or non-gaussian filtering, smoothing, and forecasting (NLGF) problems are pervasive
SLAM for Ship Hull Inspection using Exactly Sparse Extended Information Filters
 SLAM for Ship Hull Inspection using Exactly Sparse Extended Information Filters Matthew Walter 1,2, Franz Hover 1, & John Leonard 1,2 Massachusetts Institute of Technology 1 Department of Mechanical Engineering
SLAM for Ship Hull Inspection using Exactly Sparse Extended Information Filters Matthew Walter 1,2, Franz Hover 1, & John Leonard 1,2 Massachusetts Institute of Technology 1 Department of Mechanical Engineering