L06. LINEAR KALMAN FILTERS. NA568 Mobile Robotics: Methods & Algorithms
|
|
|
- Emily Tyler
- 5 years ago
- Views:
Transcription






1 L06. LINEAR KALMAN FILTERS NA568 Mobile Robotics: Methods & Algorithms

2 2 PS2 is out! Landmark-based Localization: EKF, UKF, PF
3 Today s Lecture Minimum Mean Square Error (MMSE) Linear Kalman Filter Gaussian systems Optimal Unbiased Estimator Non-Gaussian systems Best Linear Unbiased Estimator (BLUE) KF Falling Body Demo
4 Estimation is.. Data Estimation Engine Estimate Prior Beliefs From P. Newman, Oxford
5 Minimum Mean Squared Error Estimation Choose so argument is minimised Expectation operator ( average ) From P. Newman, Oxford
6 Evaluating. From probability theory Very Important Thing From P. Newman, Oxford
7 Recursive Bayesian Estimation Key idea: one mans posterior is another s prior ;-) Sequence of data (measurements) We want conditional mean (mmse) of x given Z k Can we iteratively calculate this i.e. every time a new measurement comes in, update our estimate? From P. Newman, Oxford
8 Yes Implicitly dropped dependence on Z k-1 At time k Explains data at time k At time k-1 as function of x at time k And if these distributions are Gaussian turning the handle leads to the Kalman filter From P. Newman, Oxford


9 Bayes Filter Reminder Prior Prediction Correction


10 Kalman Filter Distribution Everything is Gaussian 1D 3D Courtesy: K. Arras


11 Properties of Gaussians Univariate Multivariate We stay in the Gaussian world as long as we start with Gaussians and perform only linear transformations.
12 12 Gaussian Covariance & Information Parameterizations: A Dual Relationship Covariance Form Information Form Marginalization (sub-block) (Schur complement) Conditioning (Schur complement) (sub-block)
13 Discrete Kalman Filter 13 Estimates the (n 1) state x t of a discrete-time controlled process that is governed by the linear stochastic difference equation Observed through (k 1) measurements z t
14 Components of a Kalman Filter 14 A t Matrix (n n) that describes how the state evolves from t-1 to t without controls or noise. B t C t δ t Matrix (n m) that describes how the control u t changes the state from t-1 to t. Matrix (k n) that describes a projection of state x t to an observation z t. Random variables representing the process and measurement noise that are assumed to be independent and normally distributed with covariance R t and Q t, respectively.
15 Linear Gaussian Systems: Initialization 15 Initial belief is normally distributed:

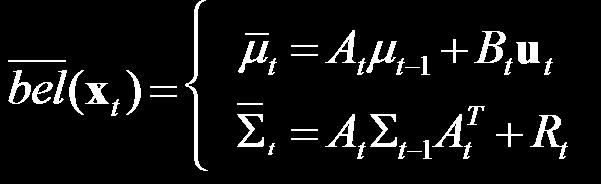
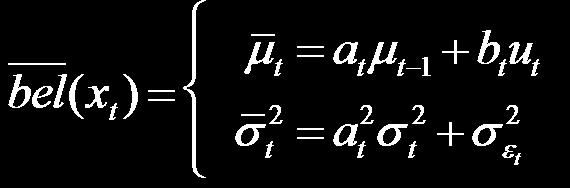
16 Linear Gaussian Systems: Dynamics 16 Dynamics are linear function of state and control plus additive noise:

17 17 Linear Gaussian Systems: Dynamics

18 Linear Gaussian Systems: Observations 18 Observations are linear function of state plus additive noise:

19 19 Linear Gaussian Systems: Observations
20 20 Gaussian Covariance & Information Parameterizations: A Dual Relationship Covariance Form Information Form Marginalization (sub-block) (Schur complement) Conditioning (Schur complement) (sub-block)

21 Kalman Filter Algorithm
")

22 1D Kalman Filter Example (1) prediction measurement correction It's a weighted mean!
23 1D Kalman Filter Example (2) prediction correction measurement
24 The Prediction-Correction-Cycle 24 Prediction prediction

25 The Prediction-Correction-Cycle 25 correction measurement Correction

26 The Prediction-Correction-Cycle 26 Prediction Correction
27 Alternative (Equivalent) Covariance Update Expressions Defining innovation/observation covariance as Alternative Update Expressions (see Bar-Shalom Chap 5) Joseph form
28 What if the statistics are not Gaussian? Structure of KF corresponds to the Best Linear Unbiased Estimator (BLUE) i.e., if we restrict our estimator to the class of linear estimators, then the KF is the best linear MMSE estimator* Affine function of z Estimator Matrix MSE Remarks The best estimator (in the MMSE sense) for Gaussian Random variables is identical to The best linear estimator for arbitrarily distributed random variables with the same firstand second-order moments. This result will be proved (and used) in L07 *Note: a nonlinear estimator could do better!



29 Falling Body Example Governing Equations CT State-Space Description I.C. y 0, v 0 DT State-Space Description y

30 ProbRob Notation Initial State Process Model Observation Model
31 Falling Body: Prediction Process model builds correlation beetween position and velocity Falling body position uncertainty increases during open-loop prediction due to uncertainty in velocity
32 Falling Body: Correction 0 Zero state uncertainty case:


33 Falling Body: Correction 1 Infinite state uncertainty case:
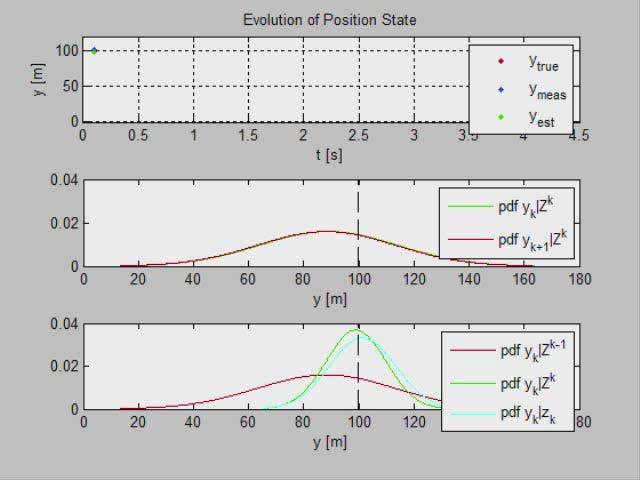
34 Noisy Range Measurements (σ = 12 m) 120 Noisy Measured Falling Body Position Measured y [m] t [s]
35 180 Estimated Position with 3 Sigma Error Bounds KF Results Position 3σ y true y est y [m] 80 y [m] x 0 = [ , ] T diag(p 0 ) 0.5 = [25, 5] T R 0.5 = 12 Estimated Falling Body Position y true y meas t [s] y est v [m/s] x 0 = [ , ] T diag(p 0 ) 0.5 = [25, 5] T R 0.5 = t [s] Estimated Velocity with 3 Sigma Error Bounds Velocity 3σ x 0 = [ , ] T v true v est -40 diag(p 0 ) 0.5 = [25, 5] T R 0.5 = t [s]
36
37 Commonly used: the i j notation true estimated This is useful for derivations but we can never use it in a calc as x is unknown truth! Data up to t=j
38 prediction is last estimate no New control u(k) available? yes Input to plant enters here e.g steering wheel angle Prediction x(k k-1) = x(k-1 k-1) P(k k-1) = P(k-1 k-1) x(k k-1) = Fx(k-1 k-1) +Bu(k) P(k k-1) = F P(k-1 k-1) F T +GQG T Delay no New observation z(k) available? yes Data from sensors enter algorithm here e.g compass measurement Prepare For Update x(k k) = x(k k-1) P(k k) = P(k k-1) S = H P(k k-1) H T +R W = P(k k-1) H T S -1 v(k) = z(k) - H x(k k-1) estimate is last prediction Update k=k+1 x(k k) = x(k k-1)+ Wv(k) P(k k) = P(k k-1) - W S W T
39 Kalman Filter Summary 39 Highly efficient: Polynomial in measurement dimensionality k and state dimensionality n: O(k n 2 ) Optimal for linear Gaussian systems! Most robotics systems are nonlinear!
Bayes Filter Reminder. Kalman Filter Localization. Properties of Gaussians. Gaussians. Prediction. Correction. σ 2. Univariate. 1 2πσ e.
 Kalman Filter Localization Bayes Filter Reminder Prediction Correction Gaussians p(x) ~ N(µ,σ 2 ) : Properties of Gaussians Univariate p(x) = 1 1 2πσ e 2 (x µ) 2 σ 2 µ Univariate -σ σ Multivariate µ Multivariate
Kalman Filter Localization Bayes Filter Reminder Prediction Correction Gaussians p(x) ~ N(µ,σ 2 ) : Properties of Gaussians Univariate p(x) = 1 1 2πσ e 2 (x µ) 2 σ 2 µ Univariate -σ σ Multivariate µ Multivariate
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: Extended Kalman Filter Dr. Kostas Alexis (CSE) These slides relied on the lectures from C. Stachniss, J. Sturm and the book Probabilistic Robotics from Thurn et al.
Autonomous Mobile Robot Design Topic: Extended Kalman Filter Dr. Kostas Alexis (CSE) These slides relied on the lectures from C. Stachniss, J. Sturm and the book Probabilistic Robotics from Thurn et al.
Introduction to Mobile Robotics Bayes Filter Kalman Filter
 Introduction to Mobile Robotics Bayes Filter Kalman Filter Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Giorgio Grisetti, Kai Arras 1 Bayes Filter Reminder 1. Algorithm Bayes_filter( Bel(x),d ):
Introduction to Mobile Robotics Bayes Filter Kalman Filter Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Giorgio Grisetti, Kai Arras 1 Bayes Filter Reminder 1. Algorithm Bayes_filter( Bel(x),d ):
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Probabilistic Fundamentals in Robotics Gaussian Filters Course Outline Basic mathematical framework Probabilistic models of mobile robots Mobile
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Probabilistic Fundamentals in Robotics Gaussian Filters Course Outline Basic mathematical framework Probabilistic models of mobile robots Mobile
CS 532: 3D Computer Vision 6 th Set of Notes
 1 CS 532: 3D Computer Vision 6 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Lecture Outline Intro to Covariance
1 CS 532: 3D Computer Vision 6 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Lecture Outline Intro to Covariance
Probabilistic Fundamentals in Robotics. DAUIN Politecnico di Torino July 2010
 Probabilistic Fundamentals in Robotics Gaussian Filters Basilio Bona DAUIN Politecnico di Torino July 2010 Course Outline Basic mathematical framework Probabilistic models of mobile robots Mobile robot
Probabilistic Fundamentals in Robotics Gaussian Filters Basilio Bona DAUIN Politecnico di Torino July 2010 Course Outline Basic mathematical framework Probabilistic models of mobile robots Mobile robot
State Observers and the Kalman filter
 Modelling and Control of Dynamic Systems State Observers and the Kalman filter Prof. Oreste S. Bursi University of Trento Page 1 Feedback System State variable feedback system: Control feedback law:u =
Modelling and Control of Dynamic Systems State Observers and the Kalman filter Prof. Oreste S. Bursi University of Trento Page 1 Feedback System State variable feedback system: Control feedback law:u =
Autonomous Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 6.2: Kalman Filter Jürgen Sturm Technische Universität München Motivation Bayes filter is a useful tool for state
Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 6.2: Kalman Filter Jürgen Sturm Technische Universität München Motivation Bayes filter is a useful tool for state
Robotics 2 Target Tracking. Kai Arras, Cyrill Stachniss, Maren Bennewitz, Wolfram Burgard
 Robotics 2 Target Tracking Kai Arras, Cyrill Stachniss, Maren Bennewitz, Wolfram Burgard Slides by Kai Arras, Gian Diego Tipaldi, v.1.1, Jan 2012 Chapter Contents Target Tracking Overview Applications
Robotics 2 Target Tracking Kai Arras, Cyrill Stachniss, Maren Bennewitz, Wolfram Burgard Slides by Kai Arras, Gian Diego Tipaldi, v.1.1, Jan 2012 Chapter Contents Target Tracking Overview Applications
Introduction to Unscented Kalman Filter
 Introduction to Unscented Kalman Filter 1 Introdution In many scientific fields, we use certain models to describe the dynamics of system, such as mobile robot, vision tracking and so on. The word dynamics
Introduction to Unscented Kalman Filter 1 Introdution In many scientific fields, we use certain models to describe the dynamics of system, such as mobile robot, vision tracking and so on. The word dynamics
Lecture 2: From Linear Regression to Kalman Filter and Beyond
 Lecture 2: From Linear Regression to Kalman Filter and Beyond Department of Biomedical Engineering and Computational Science Aalto University January 26, 2012 Contents 1 Batch and Recursive Estimation
Lecture 2: From Linear Regression to Kalman Filter and Beyond Department of Biomedical Engineering and Computational Science Aalto University January 26, 2012 Contents 1 Batch and Recursive Estimation
6.4 Kalman Filter Equations
 6.4 Kalman Filter Equations 6.4.1 Recap: Auxiliary variables Recall the definition of the auxiliary random variables x p k) and x m k): Init: x m 0) := x0) S1: x p k) := Ak 1)x m k 1) +uk 1) +vk 1) S2:
6.4 Kalman Filter Equations 6.4.1 Recap: Auxiliary variables Recall the definition of the auxiliary random variables x p k) and x m k): Init: x m 0) := x0) S1: x p k) := Ak 1)x m k 1) +uk 1) +vk 1) S2:
Particle Filters; Simultaneous Localization and Mapping (Intelligent Autonomous Robotics) Subramanian Ramamoorthy School of Informatics
 Subramanian Ramamoorthy School of Informatics") Particle Filters; Simultaneous Localization and Mapping (Intelligent Autonomous Robotics) Subramanian Ramamoorthy School of Informatics Recap: State Estimation using Kalman Filter Project state and error
Particle Filters; Simultaneous Localization and Mapping (Intelligent Autonomous Robotics) Subramanian Ramamoorthy School of Informatics Recap: State Estimation using Kalman Filter Project state and error
L03. PROBABILITY REVIEW II COVARIANCE PROJECTION. NA568 Mobile Robotics: Methods & Algorithms
 L03. PROBABILITY REVIEW II COVARIANCE PROJECTION NA568 Mobile Robotics: Methods & Algorithms Today s Agenda State Representation and Uncertainty Multivariate Gaussian Covariance Projection Probabilistic
L03. PROBABILITY REVIEW II COVARIANCE PROJECTION NA568 Mobile Robotics: Methods & Algorithms Today s Agenda State Representation and Uncertainty Multivariate Gaussian Covariance Projection Probabilistic
L11. EKF SLAM: PART I. NA568 Mobile Robotics: Methods & Algorithms
 L11. EKF SLAM: PART I NA568 Mobile Robotics: Methods & Algorithms Today s Topic EKF Feature-Based SLAM State Representation Process / Observation Models Landmark Initialization Robot-Landmark Correlation
L11. EKF SLAM: PART I NA568 Mobile Robotics: Methods & Algorithms Today s Topic EKF Feature-Based SLAM State Representation Process / Observation Models Landmark Initialization Robot-Landmark Correlation
2D Image Processing. Bayes filter implementation: Kalman filter
 2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
Simultaneous Localization and Mapping (SLAM) Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo") Simultaneous Localization and Mapping (SLAM) Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Introduction SLAM asks the following question: Is it possible for an autonomous vehicle
Simultaneous Localization and Mapping (SLAM) Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Introduction SLAM asks the following question: Is it possible for an autonomous vehicle
A Comparison of the EKF, SPKF, and the Bayes Filter for Landmark-Based Localization
 A Comparison of the EKF, SPKF, and the Bayes Filter for Landmark-Based Localization and Timothy D. Barfoot CRV 2 Outline Background Objective Experimental Setup Results Discussion Conclusion 2 Outline
A Comparison of the EKF, SPKF, and the Bayes Filter for Landmark-Based Localization and Timothy D. Barfoot CRV 2 Outline Background Objective Experimental Setup Results Discussion Conclusion 2 Outline
Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization
 Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras 1 Motivation Recall: Discrete filter Discretize the
Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras 1 Motivation Recall: Discrete filter Discretize the
Lecture 2: From Linear Regression to Kalman Filter and Beyond
 Lecture 2: From Linear Regression to Kalman Filter and Beyond January 18, 2017 Contents 1 Batch and Recursive Estimation 2 Towards Bayesian Filtering 3 Kalman Filter and Bayesian Filtering and Smoothing
Lecture 2: From Linear Regression to Kalman Filter and Beyond January 18, 2017 Contents 1 Batch and Recursive Estimation 2 Towards Bayesian Filtering 3 Kalman Filter and Bayesian Filtering and Smoothing
Kalman filtering and friends: Inference in time series models. Herke van Hoof slides mostly by Michael Rubinstein
 Kalman filtering and friends: Inference in time series models Herke van Hoof slides mostly by Michael Rubinstein Problem overview Goal Estimate most probable state at time k using measurement up to time
Kalman filtering and friends: Inference in time series models Herke van Hoof slides mostly by Michael Rubinstein Problem overview Goal Estimate most probable state at time k using measurement up to time
The Kalman Filter ImPr Talk
 The Kalman Filter ImPr Talk Ged Ridgway Centre for Medical Image Computing November, 2006 Outline What is the Kalman Filter? State Space Models Kalman Filter Overview Bayesian Updating of Estimates Kalman
The Kalman Filter ImPr Talk Ged Ridgway Centre for Medical Image Computing November, 2006 Outline What is the Kalman Filter? State Space Models Kalman Filter Overview Bayesian Updating of Estimates Kalman
2D Image Processing. Bayes filter implementation: Kalman filter
 2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Dr. Gabriele Bleser Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche
2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Dr. Gabriele Bleser Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche
Robot Localization and Kalman Filters
 Robot Localization and Kalman Filters Rudy Negenborn rudy@negenborn.net August 26, 2003 Outline Robot Localization Probabilistic Localization Kalman Filters Kalman Localization Kalman Localization with
Robot Localization and Kalman Filters Rudy Negenborn rudy@negenborn.net August 26, 2003 Outline Robot Localization Probabilistic Localization Kalman Filters Kalman Localization Kalman Localization with
From Bayes to Extended Kalman Filter
 From Bayes to Extended Kalman Filter Michal Reinštein Czech Technical University in Prague Faculty of Electrical Engineering, Department of Cybernetics Center for Machine Perception http://cmp.felk.cvut.cz/
From Bayes to Extended Kalman Filter Michal Reinštein Czech Technical University in Prague Faculty of Electrical Engineering, Department of Cybernetics Center for Machine Perception http://cmp.felk.cvut.cz/
TSRT14: Sensor Fusion Lecture 8
 TSRT14: Sensor Fusion Lecture 8 Particle filter theory Marginalized particle filter Gustaf Hendeby gustaf.hendeby@liu.se TSRT14 Lecture 8 Gustaf Hendeby Spring 2018 1 / 25 Le 8: particle filter theory,
TSRT14: Sensor Fusion Lecture 8 Particle filter theory Marginalized particle filter Gustaf Hendeby gustaf.hendeby@liu.se TSRT14 Lecture 8 Gustaf Hendeby Spring 2018 1 / 25 Le 8: particle filter theory,
Introduction to Mobile Robotics Probabilistic Robotics
 Introduction to Mobile Robotics Probabilistic Robotics Wolfram Burgard 1 Probabilistic Robotics Key idea: Explicit representation of uncertainty (using the calculus of probability theory) Perception Action
Introduction to Mobile Robotics Probabilistic Robotics Wolfram Burgard 1 Probabilistic Robotics Key idea: Explicit representation of uncertainty (using the calculus of probability theory) Perception Action
EKF and SLAM. McGill COMP 765 Sept 18 th, 2017
 EKF and SLAM McGill COMP 765 Sept 18 th, 2017 Outline News and information Instructions for paper presentations Continue on Kalman filter: EKF and extension to mapping Example of a real mapping system:
EKF and SLAM McGill COMP 765 Sept 18 th, 2017 Outline News and information Instructions for paper presentations Continue on Kalman filter: EKF and extension to mapping Example of a real mapping system:
CS491/691: Introduction to Aerial Robotics
 CS491/691: Introduction to Aerial Robotics Topic: State Estimation Dr. Kostas Alexis (CSE) World state (or system state) Belief state: Our belief/estimate of the world state World state: Real state of
CS491/691: Introduction to Aerial Robotics Topic: State Estimation Dr. Kostas Alexis (CSE) World state (or system state) Belief state: Our belief/estimate of the world state World state: Real state of
Lecture 7: Optimal Smoothing
 Department of Biomedical Engineering and Computational Science Aalto University March 17, 2011 Contents 1 What is Optimal Smoothing? 2 Bayesian Optimal Smoothing Equations 3 Rauch-Tung-Striebel Smoother
Department of Biomedical Engineering and Computational Science Aalto University March 17, 2011 Contents 1 What is Optimal Smoothing? 2 Bayesian Optimal Smoothing Equations 3 Rauch-Tung-Striebel Smoother
ESTIMATOR STABILITY ANALYSIS IN SLAM. Teresa Vidal-Calleja, Juan Andrade-Cetto, Alberto Sanfeliu
 ESTIMATOR STABILITY ANALYSIS IN SLAM Teresa Vidal-Calleja, Juan Andrade-Cetto, Alberto Sanfeliu Institut de Robtica i Informtica Industrial, UPC-CSIC Llorens Artigas 4-6, Barcelona, 88 Spain {tvidal, cetto,
ESTIMATOR STABILITY ANALYSIS IN SLAM Teresa Vidal-Calleja, Juan Andrade-Cetto, Alberto Sanfeliu Institut de Robtica i Informtica Industrial, UPC-CSIC Llorens Artigas 4-6, Barcelona, 88 Spain {tvidal, cetto,
Using the Kalman Filter for SLAM AIMS 2015
 Using the Kalman Filter for SLAM AIMS 2015 Contents Trivial Kinematics Rapid sweep over localisation and mapping (components of SLAM) Basic EKF Feature Based SLAM Feature types and representations Implementation
Using the Kalman Filter for SLAM AIMS 2015 Contents Trivial Kinematics Rapid sweep over localisation and mapping (components of SLAM) Basic EKF Feature Based SLAM Feature types and representations Implementation
Robotics 2 Target Tracking. Giorgio Grisetti, Cyrill Stachniss, Kai Arras, Wolfram Burgard
 Robotics 2 Target Tracking Giorgio Grisetti, Cyrill Stachniss, Kai Arras, Wolfram Burgard Linear Dynamical System (LDS) Stochastic process governed by is the state vector is the input vector is the process
Robotics 2 Target Tracking Giorgio Grisetti, Cyrill Stachniss, Kai Arras, Wolfram Burgard Linear Dynamical System (LDS) Stochastic process governed by is the state vector is the input vector is the process
CIS 390 Fall 2016 Robotics: Planning and Perception Final Review Questions
 CIS 390 Fall 2016 Robotics: Planning and Perception Final Review Questions December 14, 2016 Questions Throughout the following questions we will assume that x t is the state vector at time t, z t is the
CIS 390 Fall 2016 Robotics: Planning and Perception Final Review Questions December 14, 2016 Questions Throughout the following questions we will assume that x t is the state vector at time t, z t is the
9 Multi-Model State Estimation
 Technion Israel Institute of Technology, Department of Electrical Engineering Estimation and Identification in Dynamical Systems (048825) Lecture Notes, Fall 2009, Prof. N. Shimkin 9 Multi-Model State
Technion Israel Institute of Technology, Department of Electrical Engineering Estimation and Identification in Dynamical Systems (048825) Lecture Notes, Fall 2009, Prof. N. Shimkin 9 Multi-Model State
1 Kalman Filter Introduction
 1 Kalman Filter Introduction You should first read Chapter 1 of Stochastic models, estimation, and control: Volume 1 by Peter S. Maybec (available here). 1.1 Explanation of Equations (1-3) and (1-4) Equation
1 Kalman Filter Introduction You should first read Chapter 1 of Stochastic models, estimation, and control: Volume 1 by Peter S. Maybec (available here). 1.1 Explanation of Equations (1-3) and (1-4) Equation
SLAM Techniques and Algorithms. Jack Collier. Canada. Recherche et développement pour la défense Canada. Defence Research and Development Canada
 SLAM Techniques and Algorithms Jack Collier Defence Research and Development Canada Recherche et développement pour la défense Canada Canada Goals What will we learn Gain an appreciation for what SLAM
SLAM Techniques and Algorithms Jack Collier Defence Research and Development Canada Recherche et développement pour la défense Canada Canada Goals What will we learn Gain an appreciation for what SLAM
PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 13: SEQUENTIAL DATA
 PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 13: SEQUENTIAL DATA Contents in latter part Linear Dynamical Systems What is different from HMM? Kalman filter Its strength and limitation Particle Filter
PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 13: SEQUENTIAL DATA Contents in latter part Linear Dynamical Systems What is different from HMM? Kalman filter Its strength and limitation Particle Filter
State Estimation for Nonlinear Systems using Restricted Genetic Optimization
 State Estimation for Nonlinear Systems using Restricted Genetic Optimization Santiago Garrido, Luis Moreno, and Carlos Balaguer Universidad Carlos III de Madrid, Leganés 28911, Madrid (Spain) Abstract.
State Estimation for Nonlinear Systems using Restricted Genetic Optimization Santiago Garrido, Luis Moreno, and Carlos Balaguer Universidad Carlos III de Madrid, Leganés 28911, Madrid (Spain) Abstract.
Dual Estimation and the Unscented Transformation
 Dual Estimation and the Unscented Transformation Eric A. Wan ericwan@ece.ogi.edu Rudolph van der Merwe rudmerwe@ece.ogi.edu Alex T. Nelson atnelson@ece.ogi.edu Oregon Graduate Institute of Science & Technology
Dual Estimation and the Unscented Transformation Eric A. Wan ericwan@ece.ogi.edu Rudolph van der Merwe rudmerwe@ece.ogi.edu Alex T. Nelson atnelson@ece.ogi.edu Oregon Graduate Institute of Science & Technology
2D Image Processing (Extended) Kalman and particle filter
 Kalman and particle filter") 2D Image Processing (Extended) Kalman and particle filter Prof. Didier Stricker Dr. Gabriele Bleser Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz
2D Image Processing (Extended) Kalman and particle filter Prof. Didier Stricker Dr. Gabriele Bleser Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz
A Study of Covariances within Basic and Extended Kalman Filters
 A Study of Covariances within Basic and Extended Kalman Filters David Wheeler Kyle Ingersoll December 2, 2013 Abstract This paper explores the role of covariance in the context of Kalman filters. The underlying
A Study of Covariances within Basic and Extended Kalman Filters David Wheeler Kyle Ingersoll December 2, 2013 Abstract This paper explores the role of covariance in the context of Kalman filters. The underlying
The Unscented Particle Filter
 The Unscented Particle Filter Rudolph van der Merwe (OGI) Nando de Freitas (UC Bereley) Arnaud Doucet (Cambridge University) Eric Wan (OGI) Outline Optimal Estimation & Filtering Optimal Recursive Bayesian
The Unscented Particle Filter Rudolph van der Merwe (OGI) Nando de Freitas (UC Bereley) Arnaud Doucet (Cambridge University) Eric Wan (OGI) Outline Optimal Estimation & Filtering Optimal Recursive Bayesian
Image Alignment and Mosaicing Feature Tracking and the Kalman Filter
 Image Alignment and Mosaicing Feature Tracking and the Kalman Filter Image Alignment Applications Local alignment: Tracking Stereo Global alignment: Camera jitter elimination Image enhancement Panoramic
Image Alignment and Mosaicing Feature Tracking and the Kalman Filter Image Alignment Applications Local alignment: Tracking Stereo Global alignment: Camera jitter elimination Image enhancement Panoramic
EKF, UKF. Pieter Abbeel UC Berkeley EECS. Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics
 EKF, UKF Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Kalman Filter Kalman Filter = special case of a Bayes filter with dynamics model and sensory
EKF, UKF Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Kalman Filter Kalman Filter = special case of a Bayes filter with dynamics model and sensory
EKF, UKF. Pieter Abbeel UC Berkeley EECS. Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics
 EKF, UKF Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Kalman Filter Kalman Filter = special case of a Bayes filter with dynamics model and sensory
EKF, UKF Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Kalman Filter Kalman Filter = special case of a Bayes filter with dynamics model and sensory
Ensemble Data Assimilation and Uncertainty Quantification
 Ensemble Data Assimilation and Uncertainty Quantification Jeff Anderson National Center for Atmospheric Research pg 1 What is Data Assimilation? Observations combined with a Model forecast + to produce
Ensemble Data Assimilation and Uncertainty Quantification Jeff Anderson National Center for Atmospheric Research pg 1 What is Data Assimilation? Observations combined with a Model forecast + to produce
Using the Kalman Filter to Estimate the State of a Maneuvering Aircraft
 1 Using the Kalman Filter to Estimate the State of a Maneuvering Aircraft K. Meier and A. Desai Abstract Using sensors that only measure the bearing angle and range of an aircraft, a Kalman filter is implemented
1 Using the Kalman Filter to Estimate the State of a Maneuvering Aircraft K. Meier and A. Desai Abstract Using sensors that only measure the bearing angle and range of an aircraft, a Kalman filter is implemented
Nonlinear Estimation Techniques for Impact Point Prediction of Ballistic Targets
 Nonlinear Estimation Techniques for Impact Point Prediction of Ballistic Targets J. Clayton Kerce a, George C. Brown a, and David F. Hardiman b a Georgia Tech Research Institute, Georgia Institute of Technology,
Nonlinear Estimation Techniques for Impact Point Prediction of Ballistic Targets J. Clayton Kerce a, George C. Brown a, and David F. Hardiman b a Georgia Tech Research Institute, Georgia Institute of Technology,
EE 565: Position, Navigation, and Timing
 EE 565: Position, Navigation, and Timing Kalman Filtering Example Aly El-Osery Kevin Wedeward Electrical Engineering Department, New Mexico Tech Socorro, New Mexico, USA In Collaboration with Stephen Bruder
EE 565: Position, Navigation, and Timing Kalman Filtering Example Aly El-Osery Kevin Wedeward Electrical Engineering Department, New Mexico Tech Socorro, New Mexico, USA In Collaboration with Stephen Bruder
Probabilistic Graphical Models
 Probabilistic Graphical Models Brown University CSCI 2950-P, Spring 2013 Prof. Erik Sudderth Lecture 12: Gaussian Belief Propagation, State Space Models and Kalman Filters Guest Kalman Filter Lecture by
Probabilistic Graphical Models Brown University CSCI 2950-P, Spring 2013 Prof. Erik Sudderth Lecture 12: Gaussian Belief Propagation, State Space Models and Kalman Filters Guest Kalman Filter Lecture by
the robot in its current estimated position and orientation (also include a point at the reference point of the robot)
") CSCI 4190 Introduction to Robotic Algorithms, Spring 006 Assignment : out February 13, due February 3 and March Localization and the extended Kalman filter In this assignment, you will write a program
CSCI 4190 Introduction to Robotic Algorithms, Spring 006 Assignment : out February 13, due February 3 and March Localization and the extended Kalman filter In this assignment, you will write a program
Gaussians. Pieter Abbeel UC Berkeley EECS. Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics
 Gaussians Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Outline Univariate Gaussian Multivariate Gaussian Law of Total Probability Conditioning
Gaussians Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Outline Univariate Gaussian Multivariate Gaussian Law of Total Probability Conditioning
Why do we care? Measurements. Handling uncertainty over time: predicting, estimating, recognizing, learning. Dealing with time
 Handling uncertainty over time: predicting, estimating, recognizing, learning Chris Atkeson 2004 Why do we care? Speech recognition makes use of dependence of words and phonemes across time. Knowing where
Handling uncertainty over time: predicting, estimating, recognizing, learning Chris Atkeson 2004 Why do we care? Speech recognition makes use of dependence of words and phonemes across time. Knowing where
Markov localization uses an explicit, discrete representation for the probability of all position in the state space.
 Markov Kalman Filter Localization Markov localization localization starting from any unknown position recovers from ambiguous situation. However, to update the probability of all positions within the whole
Markov Kalman Filter Localization Markov localization localization starting from any unknown position recovers from ambiguous situation. However, to update the probability of all positions within the whole
The Kalman Filter. Data Assimilation & Inverse Problems from Weather Forecasting to Neuroscience. Sarah Dance
 The Kalman Filter Data Assimilation & Inverse Problems from Weather Forecasting to Neuroscience Sarah Dance School of Mathematical and Physical Sciences, University of Reading s.l.dance@reading.ac.uk July
The Kalman Filter Data Assimilation & Inverse Problems from Weather Forecasting to Neuroscience Sarah Dance School of Mathematical and Physical Sciences, University of Reading s.l.dance@reading.ac.uk July
Robotics. Mobile Robotics. Marc Toussaint U Stuttgart
 Robotics Mobile Robotics State estimation, Bayes filter, odometry, particle filter, Kalman filter, SLAM, joint Bayes filter, EKF SLAM, particle SLAM, graph-based SLAM Marc Toussaint U Stuttgart DARPA Grand
Robotics Mobile Robotics State estimation, Bayes filter, odometry, particle filter, Kalman filter, SLAM, joint Bayes filter, EKF SLAM, particle SLAM, graph-based SLAM Marc Toussaint U Stuttgart DARPA Grand
Why do we care? Examples. Bayes Rule. What room am I in? Handling uncertainty over time: predicting, estimating, recognizing, learning
 Handling uncertainty over time: predicting, estimating, recognizing, learning Chris Atkeson 004 Why do we care? Speech recognition makes use of dependence of words and phonemes across time. Knowing where
Handling uncertainty over time: predicting, estimating, recognizing, learning Chris Atkeson 004 Why do we care? Speech recognition makes use of dependence of words and phonemes across time. Knowing where
Stochastic Processes, Kernel Regression, Infinite Mixture Models
 Stochastic Processes, Kernel Regression, Infinite Mixture Models Gabriel Huang (TA for Simon Lacoste-Julien) IFT 6269 : Probabilistic Graphical Models - Fall 2018 Stochastic Process = Random Function 2
Stochastic Processes, Kernel Regression, Infinite Mixture Models Gabriel Huang (TA for Simon Lacoste-Julien) IFT 6269 : Probabilistic Graphical Models - Fall 2018 Stochastic Process = Random Function 2
Unscented Transformation of Vehicle States in SLAM
 Unscented Transformation of Vehicle States in SLAM Juan Andrade-Cetto, Teresa Vidal-Calleja, and Alberto Sanfeliu Institut de Robòtica i Informàtica Industrial, UPC-CSIC Llorens Artigas 4-6, Barcelona,
Unscented Transformation of Vehicle States in SLAM Juan Andrade-Cetto, Teresa Vidal-Calleja, and Alberto Sanfeliu Institut de Robòtica i Informàtica Industrial, UPC-CSIC Llorens Artigas 4-6, Barcelona,
Lecture 6: Bayesian Inference in SDE Models
 Lecture 6: Bayesian Inference in SDE Models Bayesian Filtering and Smoothing Point of View Simo Särkkä Aalto University Simo Särkkä (Aalto) Lecture 6: Bayesian Inference in SDEs 1 / 45 Contents 1 SDEs
Lecture 6: Bayesian Inference in SDE Models Bayesian Filtering and Smoothing Point of View Simo Särkkä Aalto University Simo Särkkä (Aalto) Lecture 6: Bayesian Inference in SDEs 1 / 45 Contents 1 SDEs
L09. PARTICLE FILTERING. NA568 Mobile Robotics: Methods & Algorithms
 L09. PARTICLE FILTERING NA568 Mobile Robotics: Methods & Algorithms Particle Filters Different approach to state estimation Instead of parametric description of state (and uncertainty), use a set of state
L09. PARTICLE FILTERING NA568 Mobile Robotics: Methods & Algorithms Particle Filters Different approach to state estimation Instead of parametric description of state (and uncertainty), use a set of state
Gaussian Filtering Strategies for Nonlinear Systems
 Gaussian Filtering Strategies for Nonlinear Systems Canonical Nonlinear Filtering Problem ~u m+1 = ~ f (~u m )+~ m+1 ~v m+1 = ~g(~u m+1 )+~ o m+1 I ~ f and ~g are nonlinear & deterministic I Noise/Errors
Gaussian Filtering Strategies for Nonlinear Systems Canonical Nonlinear Filtering Problem ~u m+1 = ~ f (~u m )+~ m+1 ~v m+1 = ~g(~u m+1 )+~ o m+1 I ~ f and ~g are nonlinear & deterministic I Noise/Errors
COS Lecture 16 Autonomous Robot Navigation
 COS 495 - Lecture 16 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
COS 495 - Lecture 16 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
Dynamic models 1 Kalman filters, linearization,
 Koller & Friedman: Chapter 16 Jordan: Chapters 13, 15 Uri Lerner s Thesis: Chapters 3,9 Dynamic models 1 Kalman filters, linearization, Switching KFs, Assumed density filters Probabilistic Graphical Models
Koller & Friedman: Chapter 16 Jordan: Chapters 13, 15 Uri Lerner s Thesis: Chapters 3,9 Dynamic models 1 Kalman filters, linearization, Switching KFs, Assumed density filters Probabilistic Graphical Models
Partially Observable Markov Decision Processes (POMDPs)
") Partially Observable Markov Decision Processes (POMDPs) Sachin Patil Guest Lecture: CS287 Advanced Robotics Slides adapted from Pieter Abbeel, Alex Lee Outline Introduction to POMDPs Locally Optimal Solutions
Partially Observable Markov Decision Processes (POMDPs) Sachin Patil Guest Lecture: CS287 Advanced Robotics Slides adapted from Pieter Abbeel, Alex Lee Outline Introduction to POMDPs Locally Optimal Solutions
4 Derivations of the Discrete-Time Kalman Filter
 Technion Israel Institute of Technology, Department of Electrical Engineering Estimation and Identification in Dynamical Systems (048825) Lecture Notes, Fall 2009, Prof N Shimkin 4 Derivations of the Discrete-Time
Technion Israel Institute of Technology, Department of Electrical Engineering Estimation and Identification in Dynamical Systems (048825) Lecture Notes, Fall 2009, Prof N Shimkin 4 Derivations of the Discrete-Time
Tracking an Accelerated Target with a Nonlinear Constant Heading Model
 Tracking an Accelerated Target with a Nonlinear Constant Heading Model Rong Yang, Gee Wah Ng DSO National Laboratories 20 Science Park Drive Singapore 118230 yrong@dsoorgsg ngeewah@dsoorgsg Abstract This
Tracking an Accelerated Target with a Nonlinear Constant Heading Model Rong Yang, Gee Wah Ng DSO National Laboratories 20 Science Park Drive Singapore 118230 yrong@dsoorgsg ngeewah@dsoorgsg Abstract This
Lecture 6: Multiple Model Filtering, Particle Filtering and Other Approximations
 Lecture 6: Multiple Model Filtering, Particle Filtering and Other Approximations Department of Biomedical Engineering and Computational Science Aalto University April 28, 2010 Contents 1 Multiple Model
Lecture 6: Multiple Model Filtering, Particle Filtering and Other Approximations Department of Biomedical Engineering and Computational Science Aalto University April 28, 2010 Contents 1 Multiple Model
Mobile Robot Localization
 Mobile Robot Localization 1 The Problem of Robot Localization Given a map of the environment, how can a robot determine its pose (planar coordinates + orientation)? Two sources of uncertainty: - observations
Mobile Robot Localization 1 The Problem of Robot Localization Given a map of the environment, how can a robot determine its pose (planar coordinates + orientation)? Two sources of uncertainty: - observations
X t = a t + r t, (7.1)
") Chapter 7 State Space Models 71 Introduction State Space models, developed over the past 10 20 years, are alternative models for time series They include both the ARIMA models of Chapters 3 6 and the Classical
Chapter 7 State Space Models 71 Introduction State Space models, developed over the past 10 20 years, are alternative models for time series They include both the ARIMA models of Chapters 3 6 and the Classical
Here represents the impulse (or delta) function. is an diagonal matrix of intensities, and is an diagonal matrix of intensities.
 function. is an diagonal matrix of intensities, and is an diagonal matrix of intensities.") 19 KALMAN FILTER 19.1 Introduction In the previous section, we derived the linear quadratic regulator as an optimal solution for the fullstate feedback control problem. The inherent assumption was that
19 KALMAN FILTER 19.1 Introduction In the previous section, we derived the linear quadratic regulator as an optimal solution for the fullstate feedback control problem. The inherent assumption was that
PROBABILISTIC REASONING OVER TIME
 PROBABILISTIC REASONING OVER TIME In which we try to interpret the present, understand the past, and perhaps predict the future, even when very little is crystal clear. Outline Time and uncertainty Inference:
PROBABILISTIC REASONING OVER TIME In which we try to interpret the present, understand the past, and perhaps predict the future, even when very little is crystal clear. Outline Time and uncertainty Inference:
1 Bayesian Linear Regression (BLR)
") Statistical Techniques in Robotics (STR, S15) Lecture#10 (Wednesday, February 11) Lecturer: Byron Boots Gaussian Properties, Bayesian Linear Regression 1 Bayesian Linear Regression (BLR) In linear regression,
Statistical Techniques in Robotics (STR, S15) Lecture#10 (Wednesday, February 11) Lecturer: Byron Boots Gaussian Properties, Bayesian Linear Regression 1 Bayesian Linear Regression (BLR) In linear regression,
ECONOMETRIC METHODS II: TIME SERIES LECTURE NOTES ON THE KALMAN FILTER. The Kalman Filter. We will be concerned with state space systems of the form
 ECONOMETRIC METHODS II: TIME SERIES LECTURE NOTES ON THE KALMAN FILTER KRISTOFFER P. NIMARK The Kalman Filter We will be concerned with state space systems of the form X t = A t X t 1 + C t u t 0.1 Z t
ECONOMETRIC METHODS II: TIME SERIES LECTURE NOTES ON THE KALMAN FILTER KRISTOFFER P. NIMARK The Kalman Filter We will be concerned with state space systems of the form X t = A t X t 1 + C t u t 0.1 Z t
Lecture: Gaussian Process Regression. STAT 6474 Instructor: Hongxiao Zhu
 Lecture: Gaussian Process Regression STAT 6474 Instructor: Hongxiao Zhu Motivation Reference: Marc Deisenroth s tutorial on Robot Learning. 2 Fast Learning for Autonomous Robots with Gaussian Processes
Lecture: Gaussian Process Regression STAT 6474 Instructor: Hongxiao Zhu Motivation Reference: Marc Deisenroth s tutorial on Robot Learning. 2 Fast Learning for Autonomous Robots with Gaussian Processes
Sensor Tasking and Control
 Sensor Tasking and Control Sensing Networking Leonidas Guibas Stanford University Computation CS428 Sensor systems are about sensing, after all... System State Continuous and Discrete Variables The quantities
Sensor Tasking and Control Sensing Networking Leonidas Guibas Stanford University Computation CS428 Sensor systems are about sensing, after all... System State Continuous and Discrete Variables The quantities
Optimal control and estimation
 Automatic Control 2 Optimal control and estimation Prof. Alberto Bemporad University of Trento Academic year 2010-2011 Prof. Alberto Bemporad (University of Trento) Automatic Control 2 Academic year 2010-2011
Automatic Control 2 Optimal control and estimation Prof. Alberto Bemporad University of Trento Academic year 2010-2011 Prof. Alberto Bemporad (University of Trento) Automatic Control 2 Academic year 2010-2011
Lecture 16: State Space Model and Kalman Filter Bus 41910, Time Series Analysis, Mr. R. Tsay
 Lecture 6: State Space Model and Kalman Filter Bus 490, Time Series Analysis, Mr R Tsay A state space model consists of two equations: S t+ F S t + Ge t+, () Z t HS t + ɛ t (2) where S t is a state vector
Lecture 6: State Space Model and Kalman Filter Bus 490, Time Series Analysis, Mr R Tsay A state space model consists of two equations: S t+ F S t + Ge t+, () Z t HS t + ɛ t (2) where S t is a state vector
Conditions for Suboptimal Filter Stability in SLAM
 Conditions for Suboptimal Filter Stability in SLAM Teresa Vidal-Calleja, Juan Andrade-Cetto and Alberto Sanfeliu Institut de Robòtica i Informàtica Industrial, UPC-CSIC Llorens Artigas -, Barcelona, Spain
Conditions for Suboptimal Filter Stability in SLAM Teresa Vidal-Calleja, Juan Andrade-Cetto and Alberto Sanfeliu Institut de Robòtica i Informàtica Industrial, UPC-CSIC Llorens Artigas -, Barcelona, Spain
Probabilistic Fundamentals in Robotics
 Probabilistic Fundamentals in Robotics Probabilistic Models of Mobile Robots Robot localization Basilio Bona DAUIN Politecnico di Torino June 2011 Course Outline Basic mathematical framework Probabilistic
Probabilistic Fundamentals in Robotics Probabilistic Models of Mobile Robots Robot localization Basilio Bona DAUIN Politecnico di Torino June 2011 Course Outline Basic mathematical framework Probabilistic
SLAM for Ship Hull Inspection using Exactly Sparse Extended Information Filters
 SLAM for Ship Hull Inspection using Exactly Sparse Extended Information Filters Matthew Walter 1,2, Franz Hover 1, & John Leonard 1,2 Massachusetts Institute of Technology 1 Department of Mechanical Engineering
SLAM for Ship Hull Inspection using Exactly Sparse Extended Information Filters Matthew Walter 1,2, Franz Hover 1, & John Leonard 1,2 Massachusetts Institute of Technology 1 Department of Mechanical Engineering
Distributed Data Fusion with Kalman Filters. Simon Julier Computer Science Department University College London
 Distributed Data Fusion with Kalman Filters Simon Julier Computer Science Department University College London S.Julier@cs.ucl.ac.uk Structure of Talk Motivation Kalman Filters Double Counting Optimal
Distributed Data Fusion with Kalman Filters Simon Julier Computer Science Department University College London S.Julier@cs.ucl.ac.uk Structure of Talk Motivation Kalman Filters Double Counting Optimal
Sequential Monte Carlo Methods for Bayesian Computation
 Sequential Monte Carlo Methods for Bayesian Computation A. Doucet Kyoto Sept. 2012 A. Doucet (MLSS Sept. 2012) Sept. 2012 1 / 136 Motivating Example 1: Generic Bayesian Model Let X be a vector parameter
Sequential Monte Carlo Methods for Bayesian Computation A. Doucet Kyoto Sept. 2012 A. Doucet (MLSS Sept. 2012) Sept. 2012 1 / 136 Motivating Example 1: Generic Bayesian Model Let X be a vector parameter
Lagrangian Data Assimilation and Manifold Detection for a Point-Vortex Model. David Darmon, AMSC Kayo Ide, AOSC, IPST, CSCAMM, ESSIC
 Lagrangian Data Assimilation and Manifold Detection for a Point-Vortex Model David Darmon, AMSC Kayo Ide, AOSC, IPST, CSCAMM, ESSIC Background Data Assimilation Iterative process Forecast Analysis Background
Lagrangian Data Assimilation and Manifold Detection for a Point-Vortex Model David Darmon, AMSC Kayo Ide, AOSC, IPST, CSCAMM, ESSIC Background Data Assimilation Iterative process Forecast Analysis Background
Lessons in Estimation Theory for Signal Processing, Communications, and Control
 Lessons in Estimation Theory for Signal Processing, Communications, and Control Jerry M. Mendel Department of Electrical Engineering University of Southern California Los Angeles, California PRENTICE HALL
Lessons in Estimation Theory for Signal Processing, Communications, and Control Jerry M. Mendel Department of Electrical Engineering University of Southern California Los Angeles, California PRENTICE HALL
State Estimation using Moving Horizon Estimation and Particle Filtering
 State Estimation using Moving Horizon Estimation and Particle Filtering James B. Rawlings Department of Chemical and Biological Engineering UW Math Probability Seminar Spring 2009 Rawlings MHE & PF 1 /
State Estimation using Moving Horizon Estimation and Particle Filtering James B. Rawlings Department of Chemical and Biological Engineering UW Math Probability Seminar Spring 2009 Rawlings MHE & PF 1 /
Kalman Filter Computer Vision (Kris Kitani) Carnegie Mellon University
 Carnegie Mellon University") Kalman Filter 16-385 Computer Vision (Kris Kitani) Carnegie Mellon University Examples up to now have been discrete (binary) random variables Kalman filtering can be seen as a special case of a temporal
Kalman Filter 16-385 Computer Vision (Kris Kitani) Carnegie Mellon University Examples up to now have been discrete (binary) random variables Kalman filtering can be seen as a special case of a temporal
Introduction to Mobile Robotics SLAM: Simultaneous Localization and Mapping
 Introduction to Mobile Robotics SLAM: Simultaneous Localization and Mapping Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz What is SLAM? Estimate the pose of a robot and the map of the environment
Introduction to Mobile Robotics SLAM: Simultaneous Localization and Mapping Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz What is SLAM? Estimate the pose of a robot and the map of the environment
Convergence of Square Root Ensemble Kalman Filters in the Large Ensemble Limit
 Convergence of Square Root Ensemble Kalman Filters in the Large Ensemble Limit Evan Kwiatkowski, Jan Mandel University of Colorado Denver December 11, 2014 OUTLINE 2 Data Assimilation Bayesian Estimation
Convergence of Square Root Ensemble Kalman Filters in the Large Ensemble Limit Evan Kwiatkowski, Jan Mandel University of Colorado Denver December 11, 2014 OUTLINE 2 Data Assimilation Bayesian Estimation
L07. KALMAN FILTERING FOR NON-LINEAR SYSTEMS. NA568 Mobile Robotics: Methods & Algorithms
 L07. KALMAN FILTERING FOR NON-LINEAR SYSTEMS NA568 Mobile Roboics: Mehods & Algorihms Today s Topic Quick review on (Linear) Kalman Filer Kalman Filering for Non-Linear Sysems Exended Kalman Filer (EKF)
L07. KALMAN FILTERING FOR NON-LINEAR SYSTEMS NA568 Mobile Roboics: Mehods & Algorihms Today s Topic Quick review on (Linear) Kalman Filer Kalman Filering for Non-Linear Sysems Exended Kalman Filer (EKF)
AUTOMOTIVE ENVIRONMENT SENSORS
 AUTOMOTIVE ENVIRONMENT SENSORS Lecture 5. Localization BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Related concepts Concepts related to vehicles moving
AUTOMOTIVE ENVIRONMENT SENSORS Lecture 5. Localization BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Related concepts Concepts related to vehicles moving
Sensor Fusion: Particle Filter
 Sensor Fusion: Particle Filter By: Gordana Stojceska stojcesk@in.tum.de Outline Motivation Applications Fundamentals Tracking People Advantages and disadvantages Summary June 05 JASS '05, St.Petersburg,
Sensor Fusion: Particle Filter By: Gordana Stojceska stojcesk@in.tum.de Outline Motivation Applications Fundamentals Tracking People Advantages and disadvantages Summary June 05 JASS '05, St.Petersburg,
Local Positioning with Parallelepiped Moving Grid
 Local Positioning with Parallelepiped Moving Grid, WPNC06 16.3.2006, niilo.sirola@tut.fi p. 1/?? TA M P E R E U N I V E R S I T Y O F T E C H N O L O G Y M a t h e m a t i c s Local Positioning with Parallelepiped
Local Positioning with Parallelepiped Moving Grid, WPNC06 16.3.2006, niilo.sirola@tut.fi p. 1/?? TA M P E R E U N I V E R S I T Y O F T E C H N O L O G Y M a t h e m a t i c s Local Positioning with Parallelepiped
Mobile Robot Localization
 Mobile Robot Localization 1 The Problem of Robot Localization Given a map of the environment, how can a robot determine its pose (planar coordinates + orientation)? Two sources of uncertainty: - observations
Mobile Robot Localization 1 The Problem of Robot Localization Given a map of the environment, how can a robot determine its pose (planar coordinates + orientation)? Two sources of uncertainty: - observations
Time Series Prediction by Kalman Smoother with Cross-Validated Noise Density
 Time Series Prediction by Kalman Smoother with Cross-Validated Noise Density Simo Särkkä E-mail: simo.sarkka@hut.fi Aki Vehtari E-mail: aki.vehtari@hut.fi Jouko Lampinen E-mail: jouko.lampinen@hut.fi Abstract
Time Series Prediction by Kalman Smoother with Cross-Validated Noise Density Simo Särkkä E-mail: simo.sarkka@hut.fi Aki Vehtari E-mail: aki.vehtari@hut.fi Jouko Lampinen E-mail: jouko.lampinen@hut.fi Abstract
Miscellaneous. Regarding reading materials. Again, ask questions (if you have) and ask them earlier
 and ask them earlier") Miscellaneous Regarding reading materials Reading materials will be provided as needed If no assigned reading, it means I think the material from class is sufficient Should be enough for you to do your
Miscellaneous Regarding reading materials Reading materials will be provided as needed If no assigned reading, it means I think the material from class is sufficient Should be enough for you to do your
Modeling and state estimation Examples State estimation Probabilities Bayes filter Particle filter. Modeling. CSC752 Autonomous Robotic Systems
 Modeling CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami February 21, 2017 Outline 1 Modeling and state estimation 2 Examples 3 State estimation 4 Probabilities
Modeling CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami February 21, 2017 Outline 1 Modeling and state estimation 2 Examples 3 State estimation 4 Probabilities
Temporal probability models. Chapter 15, Sections 1 5 1
 Temporal probability models Chapter 15, Sections 1 5 Chapter 15, Sections 1 5 1 Outline Time and uncertainty Inference: filtering, prediction, smoothing Hidden Markov models Kalman filters (a brief mention)
Temporal probability models Chapter 15, Sections 1 5 Chapter 15, Sections 1 5 1 Outline Time and uncertainty Inference: filtering, prediction, smoothing Hidden Markov models Kalman filters (a brief mention)
Prediction of ESTSP Competition Time Series by Unscented Kalman Filter and RTS Smoother
 Prediction of ESTSP Competition Time Series by Unscented Kalman Filter and RTS Smoother Simo Särkkä, Aki Vehtari and Jouko Lampinen Helsinki University of Technology Department of Electrical and Communications
Prediction of ESTSP Competition Time Series by Unscented Kalman Filter and RTS Smoother Simo Särkkä, Aki Vehtari and Jouko Lampinen Helsinki University of Technology Department of Electrical and Communications