Lecture: Gaussian Process Regression. STAT 6474 Instructor: Hongxiao Zhu
|
|
|
- Norman Strickland
- 5 years ago
- Views:
Transcription
1 Lecture: Gaussian Process Regression STAT 6474 Instructor: Hongxiao Zhu
2 Motivation Reference: Marc Deisenroth s tutorial on Robot Learning. 2

3 Fast Learning for Autonomous Robots with Gaussian Processes Demo 1: Cart-Pole Swing-up Swing up and balance a freely swinging pendulum on a cart. No knowledge about nonlinear dynamics >> learn from scratch. 3

4 Fast learning for Autonomous Robots with Gaussian processes Demo 2: Learning to Control a Low-Cost Manipulator. 4
 is")
5 Idea: Reinforcement Learning Difference between optimal control and reinforcement learning is that in optimal control, you assume that f() is known. 5
6 6
7 7
8 8
9 At x=7, what is going on? f(7) = I need to make decision based on this prediction. 9
10 10
11 We need to characterize the model errors --- Use Gaussian Process to Characterize the Uncertainty of Prediction. 11
12 From Statistical Perspective 12
13 Linear vs. Nonlinear regression We have i.i.d. data pairs Want to make inference about relations between input and output. Linear relationships. 13
14 One puts priors on w (e.g. normal), and derives the posterior. To make predictions on new input distribution:, we use posterior predictive Alternatively, one could first map x to some basis function, then let Still restrictive due to sensitivity to the choice of 14
 takes values from a function space. Assume f(.) is random. In particular, Gaussian Process.")
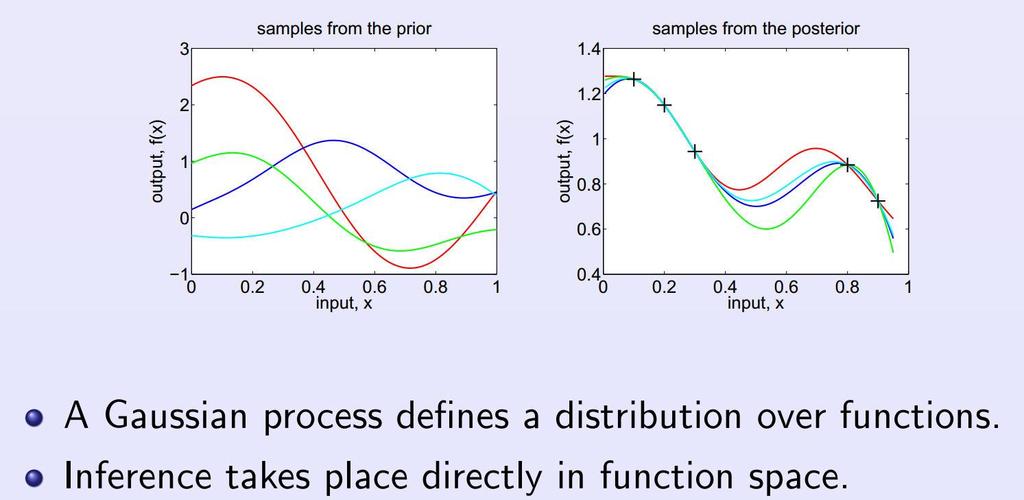
15 Want more flexible form for f(x), treat the whole f(.) as a parameter. Assume f(.) takes values from a function space. Assume f(.) is random. In particular, Gaussian Process. What does a Gaussian Process look like? 15
16 16
17 Gaussian process Assume that f(.) is a Gaussian process. Definition: A Gaussian process is a (infinite) collection of random variables, any finite number of which have a joint Gaussian distribution. A GP is completely specified by its mean m(x) and covariance function k(x, x ). 17
18 Gaussian process cont d We write with Interpret arbitrary finite projection, consistency (well-definedness). 18
19 Parametric forms of covariance functions Squared Exponential (SE) Matérn 19
20 Reminder: conditional distribution of MVN. Reference:

21 Case 1: the GP regression with noise free observations 21


22 Case 1: the GP regression noise free observations (cont d) * 22
23 Case 2: the GP regression -- noisy observations 23

24 Model Selection: Hyperparameters 24 24
 from the likelihood.")
25 Optimizing Marginal Likelihood Note: marginalized f(.) from the likelihood. 25
26 Example 1. R code demo of GP regression 26
27 The GP classification binary case 27
28 The GP classification binary case (cont d) Let y = 1/0, the class labels. Assume latent function f(x),. Assume 28
29 f is a nuisance function (latent variable). we do not observe values of f itself (we observe only the inputs X and the class labels y) and we are not particularly interested in the values of f, but rather in π, in particular for test cases π(x ). The purpose of f is solely to allow a convenient formulation of the model. 29
30 Steps for predicting the y given x : 1. First compute the distribution of the latent variable corresponding to a test case. 2. Use this distribution over the latent f to produce a probabilistic prediction. 30
31 In classification p(y f) has link function involved, conjugacy of f are lost, and the integrations in the previous slides are difficult. Thus we need to use either analytic approximations of integrals to approximate p(f X, y), or solutions based on Monte Carlo sampling. E.g. Laplace approximation, expectation propagation (EP), INLA etc. 31
 to the posterior p(f X, y).")

32 Laplace s method utilizes a Gaussian approximation q(f X, y) to the posterior p(f X, y). Laplace approximation: Local (normal) approximation to the posterior by matching the mode. We will discuss more in the non-mcmc method lecture. 32
33 33
34 Posterior predictive mean and variance based on Laplace approximation: 34
Computer Vision Group Prof. Daniel Cremers. 9. Gaussian Processes - Regression
 Group Prof. Daniel Cremers 9. Gaussian Processes - Regression Repetition: Regularized Regression Before, we solved for w using the pseudoinverse. But: we can kernelize this problem as well! First step:
Group Prof. Daniel Cremers 9. Gaussian Processes - Regression Repetition: Regularized Regression Before, we solved for w using the pseudoinverse. But: we can kernelize this problem as well! First step:
CSci 8980: Advanced Topics in Graphical Models Gaussian Processes
 CSci 8980: Advanced Topics in Graphical Models Gaussian Processes Instructor: Arindam Banerjee November 15, 2007 Gaussian Processes Outline Gaussian Processes Outline Parametric Bayesian Regression Gaussian
CSci 8980: Advanced Topics in Graphical Models Gaussian Processes Instructor: Arindam Banerjee November 15, 2007 Gaussian Processes Outline Gaussian Processes Outline Parametric Bayesian Regression Gaussian
Gaussian Processes (10/16/13)
") STA561: Probabilistic machine learning Gaussian Processes (10/16/13) Lecturer: Barbara Engelhardt Scribes: Changwei Hu, Di Jin, Mengdi Wang 1 Introduction In supervised learning, we observe some inputs
STA561: Probabilistic machine learning Gaussian Processes (10/16/13) Lecturer: Barbara Engelhardt Scribes: Changwei Hu, Di Jin, Mengdi Wang 1 Introduction In supervised learning, we observe some inputs
Gaussian Processes in Machine Learning
 Gaussian Processes in Machine Learning November 17, 2011 CharmGil Hong Agenda Motivation GP : How does it make sense? Prior : Defining a GP More about Mean and Covariance Functions Posterior : Conditioning
Gaussian Processes in Machine Learning November 17, 2011 CharmGil Hong Agenda Motivation GP : How does it make sense? Prior : Defining a GP More about Mean and Covariance Functions Posterior : Conditioning
Computer Vision Group Prof. Daniel Cremers. 4. Gaussian Processes - Regression
 Group Prof. Daniel Cremers 4. Gaussian Processes - Regression Definition (Rep.) Definition: A Gaussian process is a collection of random variables, any finite number of which have a joint Gaussian distribution.
Group Prof. Daniel Cremers 4. Gaussian Processes - Regression Definition (Rep.) Definition: A Gaussian process is a collection of random variables, any finite number of which have a joint Gaussian distribution.
GAUSSIAN PROCESS REGRESSION
 GAUSSIAN PROCESS REGRESSION CSE 515T Spring 2015 1. BACKGROUND The kernel trick again... The Kernel Trick Consider again the linear regression model: y(x) = φ(x) w + ε, with prior p(w) = N (w; 0, Σ). The
GAUSSIAN PROCESS REGRESSION CSE 515T Spring 2015 1. BACKGROUND The kernel trick again... The Kernel Trick Consider again the linear regression model: y(x) = φ(x) w + ε, with prior p(w) = N (w; 0, Σ). The
Nonparametric Bayesian Methods (Gaussian Processes)
") [70240413 Statistical Machine Learning, Spring, 2015] Nonparametric Bayesian Methods (Gaussian Processes) Jun Zhu dcszj@mail.tsinghua.edu.cn http://bigml.cs.tsinghua.edu.cn/~jun State Key Lab of Intelligent
[70240413 Statistical Machine Learning, Spring, 2015] Nonparametric Bayesian Methods (Gaussian Processes) Jun Zhu dcszj@mail.tsinghua.edu.cn http://bigml.cs.tsinghua.edu.cn/~jun State Key Lab of Intelligent
Gaussian Processes. Le Song. Machine Learning II: Advanced Topics CSE 8803ML, Spring 2012
 Gaussian Processes Le Song Machine Learning II: Advanced Topics CSE 8803ML, Spring 01 Pictorial view of embedding distribution Transform the entire distribution to expected features Feature space Feature
Gaussian Processes Le Song Machine Learning II: Advanced Topics CSE 8803ML, Spring 01 Pictorial view of embedding distribution Transform the entire distribution to expected features Feature space Feature
GWAS V: Gaussian processes
 GWAS V: Gaussian processes Dr. Oliver Stegle Christoh Lippert Prof. Dr. Karsten Borgwardt Max-Planck-Institutes Tübingen, Germany Tübingen Summer 2011 Oliver Stegle GWAS V: Gaussian processes Summer 2011
GWAS V: Gaussian processes Dr. Oliver Stegle Christoh Lippert Prof. Dr. Karsten Borgwardt Max-Planck-Institutes Tübingen, Germany Tübingen Summer 2011 Oliver Stegle GWAS V: Gaussian processes Summer 2011
Introduction to Gaussian Processes
 Introduction to Gaussian Processes Iain Murray murray@cs.toronto.edu CSC255, Introduction to Machine Learning, Fall 28 Dept. Computer Science, University of Toronto The problem Learn scalar function of
Introduction to Gaussian Processes Iain Murray murray@cs.toronto.edu CSC255, Introduction to Machine Learning, Fall 28 Dept. Computer Science, University of Toronto The problem Learn scalar function of
Practical Bayesian Optimization of Machine Learning. Learning Algorithms
 Practical Bayesian Optimization of Machine Learning Algorithms CS 294 University of California, Berkeley Tuesday, April 20, 2016 Motivation Machine Learning Algorithms (MLA s) have hyperparameters that
Practical Bayesian Optimization of Machine Learning Algorithms CS 294 University of California, Berkeley Tuesday, April 20, 2016 Motivation Machine Learning Algorithms (MLA s) have hyperparameters that
Reliability Monitoring Using Log Gaussian Process Regression
 COPYRIGHT 013, M. Modarres Reliability Monitoring Using Log Gaussian Process Regression Martin Wayne Mohammad Modarres PSA 013 Center for Risk and Reliability University of Maryland Department of Mechanical
COPYRIGHT 013, M. Modarres Reliability Monitoring Using Log Gaussian Process Regression Martin Wayne Mohammad Modarres PSA 013 Center for Risk and Reliability University of Maryland Department of Mechanical
Expectation Propagation in Dynamical Systems
 Expectation Propagation in Dynamical Systems Marc Peter Deisenroth Joint Work with Shakir Mohamed (UBC) August 10, 2012 Marc Deisenroth (TU Darmstadt) EP in Dynamical Systems 1 Motivation Figure : Complex
Expectation Propagation in Dynamical Systems Marc Peter Deisenroth Joint Work with Shakir Mohamed (UBC) August 10, 2012 Marc Deisenroth (TU Darmstadt) EP in Dynamical Systems 1 Motivation Figure : Complex
Lecture : Probabilistic Machine Learning
 Lecture : Probabilistic Machine Learning Riashat Islam Reasoning and Learning Lab McGill University September 11, 2018 ML : Many Methods with Many Links Modelling Views of Machine Learning Machine Learning
Lecture : Probabilistic Machine Learning Riashat Islam Reasoning and Learning Lab McGill University September 11, 2018 ML : Many Methods with Many Links Modelling Views of Machine Learning Machine Learning
Gaussian with mean ( µ ) and standard deviation ( σ)
 and standard deviation ( σ)") Slide from Pieter Abbeel Gaussian with mean ( µ ) and standard deviation ( σ) 10/6/16 CSE-571: Robotics X ~ N( µ, σ ) Y ~ N( aµ + b, a σ ) Y = ax + b + + + + 1 1 1 1 1 1 1 1 1 1, ~ ) ( ) ( ), ( ~ ), (
Slide from Pieter Abbeel Gaussian with mean ( µ ) and standard deviation ( σ) 10/6/16 CSE-571: Robotics X ~ N( µ, σ ) Y ~ N( aµ + b, a σ ) Y = ax + b + + + + 1 1 1 1 1 1 1 1 1 1, ~ ) ( ) ( ), ( ~ ), (
Machine Learning. Bayesian Regression & Classification. Marc Toussaint U Stuttgart
 Machine Learning Bayesian Regression & Classification learning as inference, Bayesian Kernel Ridge regression & Gaussian Processes, Bayesian Kernel Logistic Regression & GP classification, Bayesian Neural
Machine Learning Bayesian Regression & Classification learning as inference, Bayesian Kernel Ridge regression & Gaussian Processes, Bayesian Kernel Logistic Regression & GP classification, Bayesian Neural
STA 4273H: Sta-s-cal Machine Learning
 STA 4273H: Sta-s-cal Machine Learning Russ Salakhutdinov Department of Computer Science! Department of Statistical Sciences! rsalakhu@cs.toronto.edu! h0p://www.cs.utoronto.ca/~rsalakhu/ Lecture 2 In our
STA 4273H: Sta-s-cal Machine Learning Russ Salakhutdinov Department of Computer Science! Department of Statistical Sciences! rsalakhu@cs.toronto.edu! h0p://www.cs.utoronto.ca/~rsalakhu/ Lecture 2 In our
System identification and control with (deep) Gaussian processes. Andreas Damianou
 Gaussian processes. Andreas Damianou") System identification and control with (deep) Gaussian processes Andreas Damianou Department of Computer Science, University of Sheffield, UK MIT, 11 Feb. 2016 Outline Part 1: Introduction Part 2: Gaussian
System identification and control with (deep) Gaussian processes Andreas Damianou Department of Computer Science, University of Sheffield, UK MIT, 11 Feb. 2016 Outline Part 1: Introduction Part 2: Gaussian
Probabilistic Graphical Models Lecture 20: Gaussian Processes
 Probabilistic Graphical Models Lecture 20: Gaussian Processes Andrew Gordon Wilson www.cs.cmu.edu/~andrewgw Carnegie Mellon University March 30, 2015 1 / 53 What is Machine Learning? Machine learning algorithms
Probabilistic Graphical Models Lecture 20: Gaussian Processes Andrew Gordon Wilson www.cs.cmu.edu/~andrewgw Carnegie Mellon University March 30, 2015 1 / 53 What is Machine Learning? Machine learning algorithms
Model Selection for Gaussian Processes
 Institute for Adaptive and Neural Computation School of Informatics,, UK December 26 Outline GP basics Model selection: covariance functions and parameterizations Criteria for model selection Marginal
Institute for Adaptive and Neural Computation School of Informatics,, UK December 26 Outline GP basics Model selection: covariance functions and parameterizations Criteria for model selection Marginal
Computer Vision Group Prof. Daniel Cremers. 2. Regression (cont.)
") Prof. Daniel Cremers 2. Regression (cont.) Regression with MLE (Rep.) Assume that y is affected by Gaussian noise : t = f(x, w)+ where Thus, we have p(t x, w, )=N (t; f(x, w), 2 ) 2 Maximum A-Posteriori
Prof. Daniel Cremers 2. Regression (cont.) Regression with MLE (Rep.) Assume that y is affected by Gaussian noise : t = f(x, w)+ where Thus, we have p(t x, w, )=N (t; f(x, w), 2 ) 2 Maximum A-Posteriori
STA414/2104. Lecture 11: Gaussian Processes. Department of Statistics
 STA414/2104 Lecture 11: Gaussian Processes Department of Statistics www.utstat.utoronto.ca Delivered by Mark Ebden with thanks to Russ Salakhutdinov Outline Gaussian Processes Exam review Course evaluations
STA414/2104 Lecture 11: Gaussian Processes Department of Statistics www.utstat.utoronto.ca Delivered by Mark Ebden with thanks to Russ Salakhutdinov Outline Gaussian Processes Exam review Course evaluations
ADVANCED MACHINE LEARNING ADVANCED MACHINE LEARNING. Non-linear regression techniques Part - II
 1 Non-linear regression techniques Part - II Regression Algorithms in this Course Support Vector Machine Relevance Vector Machine Support vector regression Boosting random projections Relevance vector
1 Non-linear regression techniques Part - II Regression Algorithms in this Course Support Vector Machine Relevance Vector Machine Support vector regression Boosting random projections Relevance vector
Probabilistic & Unsupervised Learning
 Probabilistic & Unsupervised Learning Gaussian Processes Maneesh Sahani maneesh@gatsby.ucl.ac.uk Gatsby Computational Neuroscience Unit, and MSc ML/CSML, Dept Computer Science University College London
Probabilistic & Unsupervised Learning Gaussian Processes Maneesh Sahani maneesh@gatsby.ucl.ac.uk Gatsby Computational Neuroscience Unit, and MSc ML/CSML, Dept Computer Science University College London
STA414/2104 Statistical Methods for Machine Learning II
 STA414/2104 Statistical Methods for Machine Learning II Murat A. Erdogdu & David Duvenaud Department of Computer Science Department of Statistical Sciences Lecture 3 Slide credits: Russ Salakhutdinov Announcements
STA414/2104 Statistical Methods for Machine Learning II Murat A. Erdogdu & David Duvenaud Department of Computer Science Department of Statistical Sciences Lecture 3 Slide credits: Russ Salakhutdinov Announcements
PILCO: A Model-Based and Data-Efficient Approach to Policy Search
 PILCO: A Model-Based and Data-Efficient Approach to Policy Search (M.P. Deisenroth and C.E. Rasmussen) CSC2541 November 4, 2016 PILCO Graphical Model PILCO Probabilistic Inference for Learning COntrol
PILCO: A Model-Based and Data-Efficient Approach to Policy Search (M.P. Deisenroth and C.E. Rasmussen) CSC2541 November 4, 2016 PILCO Graphical Model PILCO Probabilistic Inference for Learning COntrol
STAT 518 Intro Student Presentation
 STAT 518 Intro Student Presentation Wen Wei Loh April 11, 2013 Title of paper Radford M. Neal [1999] Bayesian Statistics, 6: 475-501, 1999 What the paper is about Regression and Classification Flexible
STAT 518 Intro Student Presentation Wen Wei Loh April 11, 2013 Title of paper Radford M. Neal [1999] Bayesian Statistics, 6: 475-501, 1999 What the paper is about Regression and Classification Flexible
Bayesian Learning. HT2015: SC4 Statistical Data Mining and Machine Learning. Maximum Likelihood Principle. The Bayesian Learning Framework
 HT5: SC4 Statistical Data Mining and Machine Learning Dino Sejdinovic Department of Statistics Oxford http://www.stats.ox.ac.uk/~sejdinov/sdmml.html Maximum Likelihood Principle A generative model for
HT5: SC4 Statistical Data Mining and Machine Learning Dino Sejdinovic Department of Statistics Oxford http://www.stats.ox.ac.uk/~sejdinov/sdmml.html Maximum Likelihood Principle A generative model for
STA 4273H: Statistical Machine Learning
 STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Statistics! rsalakhu@utstat.toronto.edu! http://www.utstat.utoronto.ca/~rsalakhu/ Sidney Smith Hall, Room 6002 Lecture 3 Linear
STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Statistics! rsalakhu@utstat.toronto.edu! http://www.utstat.utoronto.ca/~rsalakhu/ Sidney Smith Hall, Room 6002 Lecture 3 Linear
Lecture 16-17: Bayesian Nonparametrics I. STAT 6474 Instructor: Hongxiao Zhu
 Lecture 16-17: Bayesian Nonparametrics I STAT 6474 Instructor: Hongxiao Zhu Plan for today Why Bayesian Nonparametrics? Dirichlet Distribution and Dirichlet Processes. 2 Parameter and Patterns Reference:
Lecture 16-17: Bayesian Nonparametrics I STAT 6474 Instructor: Hongxiao Zhu Plan for today Why Bayesian Nonparametrics? Dirichlet Distribution and Dirichlet Processes. 2 Parameter and Patterns Reference:
Bayesian Regression Linear and Logistic Regression
 When we want more than point estimates Bayesian Regression Linear and Logistic Regression Nicole Beckage Ordinary Least Squares Regression and Lasso Regression return only point estimates But what if we
When we want more than point estimates Bayesian Regression Linear and Logistic Regression Nicole Beckage Ordinary Least Squares Regression and Lasso Regression return only point estimates But what if we
COMS 4721: Machine Learning for Data Science Lecture 10, 2/21/2017
 COMS 4721: Machine Learning for Data Science Lecture 10, 2/21/2017 Prof. John Paisley Department of Electrical Engineering & Data Science Institute Columbia University FEATURE EXPANSIONS FEATURE EXPANSIONS
COMS 4721: Machine Learning for Data Science Lecture 10, 2/21/2017 Prof. John Paisley Department of Electrical Engineering & Data Science Institute Columbia University FEATURE EXPANSIONS FEATURE EXPANSIONS
Probabilistic & Bayesian deep learning. Andreas Damianou
 Probabilistic & Bayesian deep learning Andreas Damianou Amazon Research Cambridge, UK Talk at University of Sheffield, 19 March 2019 In this talk Not in this talk: CRFs, Boltzmann machines,... In this
Probabilistic & Bayesian deep learning Andreas Damianou Amazon Research Cambridge, UK Talk at University of Sheffield, 19 March 2019 In this talk Not in this talk: CRFs, Boltzmann machines,... In this
Nonparameteric Regression:
 Nonparameteric Regression: Nadaraya-Watson Kernel Regression & Gaussian Process Regression Seungjin Choi Department of Computer Science and Engineering Pohang University of Science and Technology 77 Cheongam-ro,
Nonparameteric Regression: Nadaraya-Watson Kernel Regression & Gaussian Process Regression Seungjin Choi Department of Computer Science and Engineering Pohang University of Science and Technology 77 Cheongam-ro,
Bayesian Machine Learning
 Bayesian Machine Learning Andrew Gordon Wilson ORIE 6741 Lecture 2: Bayesian Basics https://people.orie.cornell.edu/andrew/orie6741 Cornell University August 25, 2016 1 / 17 Canonical Machine Learning
Bayesian Machine Learning Andrew Gordon Wilson ORIE 6741 Lecture 2: Bayesian Basics https://people.orie.cornell.edu/andrew/orie6741 Cornell University August 25, 2016 1 / 17 Canonical Machine Learning
Disease mapping with Gaussian processes
 EUROHEIS2 Kuopio, Finland 17-18 August 2010 Aki Vehtari (former Helsinki University of Technology) Department of Biomedical Engineering and Computational Science (BECS) Acknowledgments Researchers - Jarno
EUROHEIS2 Kuopio, Finland 17-18 August 2010 Aki Vehtari (former Helsinki University of Technology) Department of Biomedical Engineering and Computational Science (BECS) Acknowledgments Researchers - Jarno
STA 4273H: Statistical Machine Learning
 STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Statistics! rsalakhu@utstat.toronto.edu! http://www.utstat.utoronto.ca/~rsalakhu/ Sidney Smith Hall, Room 6002 Lecture 7 Approximate
STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Statistics! rsalakhu@utstat.toronto.edu! http://www.utstat.utoronto.ca/~rsalakhu/ Sidney Smith Hall, Room 6002 Lecture 7 Approximate
Tutorial on Gaussian Processes and the Gaussian Process Latent Variable Model
 Tutorial on Gaussian Processes and the Gaussian Process Latent Variable Model (& discussion on the GPLVM tech. report by Prof. N. Lawrence, 06) Andreas Damianou Department of Neuro- and Computer Science,
Tutorial on Gaussian Processes and the Gaussian Process Latent Variable Model (& discussion on the GPLVM tech. report by Prof. N. Lawrence, 06) Andreas Damianou Department of Neuro- and Computer Science,
Probabilistic modeling. The slides are closely adapted from Subhransu Maji s slides
 Probabilistic modeling The slides are closely adapted from Subhransu Maji s slides Overview So far the models and algorithms you have learned about are relatively disconnected Probabilistic modeling framework
Probabilistic modeling The slides are closely adapted from Subhransu Maji s slides Overview So far the models and algorithms you have learned about are relatively disconnected Probabilistic modeling framework
COMP 551 Applied Machine Learning Lecture 20: Gaussian processes
 COMP 55 Applied Machine Learning Lecture 2: Gaussian processes Instructor: Ryan Lowe (ryan.lowe@cs.mcgill.ca) Slides mostly by: (herke.vanhoof@mcgill.ca) Class web page: www.cs.mcgill.ca/~hvanho2/comp55
COMP 55 Applied Machine Learning Lecture 2: Gaussian processes Instructor: Ryan Lowe (ryan.lowe@cs.mcgill.ca) Slides mostly by: (herke.vanhoof@mcgill.ca) Class web page: www.cs.mcgill.ca/~hvanho2/comp55
Density Estimation. Seungjin Choi
 Density Estimation Seungjin Choi Department of Computer Science and Engineering Pohang University of Science and Technology 77 Cheongam-ro, Nam-gu, Pohang 37673, Korea seungjin@postech.ac.kr http://mlg.postech.ac.kr/
Density Estimation Seungjin Choi Department of Computer Science and Engineering Pohang University of Science and Technology 77 Cheongam-ro, Nam-gu, Pohang 37673, Korea seungjin@postech.ac.kr http://mlg.postech.ac.kr/
STA 4273H: Statistical Machine Learning
 STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Computer Science! Department of Statistical Sciences! rsalakhu@cs.toronto.edu! h0p://www.cs.utoronto.ca/~rsalakhu/ Lecture 7 Approximate
STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Computer Science! Department of Statistical Sciences! rsalakhu@cs.toronto.edu! h0p://www.cs.utoronto.ca/~rsalakhu/ Lecture 7 Approximate
Lecture 2: From Linear Regression to Kalman Filter and Beyond
 Lecture 2: From Linear Regression to Kalman Filter and Beyond Department of Biomedical Engineering and Computational Science Aalto University January 26, 2012 Contents 1 Batch and Recursive Estimation
Lecture 2: From Linear Regression to Kalman Filter and Beyond Department of Biomedical Engineering and Computational Science Aalto University January 26, 2012 Contents 1 Batch and Recursive Estimation
Learning Gaussian Process Models from Uncertain Data
 Learning Gaussian Process Models from Uncertain Data Patrick Dallaire, Camille Besse, and Brahim Chaib-draa DAMAS Laboratory, Computer Science & Software Engineering Department, Laval University, Canada
Learning Gaussian Process Models from Uncertain Data Patrick Dallaire, Camille Besse, and Brahim Chaib-draa DAMAS Laboratory, Computer Science & Software Engineering Department, Laval University, Canada
20: Gaussian Processes
 10-708: Probabilistic Graphical Models 10-708, Spring 2016 20: Gaussian Processes Lecturer: Andrew Gordon Wilson Scribes: Sai Ganesh Bandiatmakuri 1 Discussion about ML Here we discuss an introduction
10-708: Probabilistic Graphical Models 10-708, Spring 2016 20: Gaussian Processes Lecturer: Andrew Gordon Wilson Scribes: Sai Ganesh Bandiatmakuri 1 Discussion about ML Here we discuss an introduction
Recent Advances in Bayesian Inference Techniques
 Recent Advances in Bayesian Inference Techniques Christopher M. Bishop Microsoft Research, Cambridge, U.K. research.microsoft.com/~cmbishop SIAM Conference on Data Mining, April 2004 Abstract Bayesian
Recent Advances in Bayesian Inference Techniques Christopher M. Bishop Microsoft Research, Cambridge, U.K. research.microsoft.com/~cmbishop SIAM Conference on Data Mining, April 2004 Abstract Bayesian
Introduction to Gaussian Processes
 Introduction to Gaussian Processes Iain Murray School of Informatics, University of Edinburgh The problem Learn scalar function of vector values f(x).5.5 f(x) y i.5.2.4.6.8 x f 5 5.5 x x 2.5 We have (possibly
Introduction to Gaussian Processes Iain Murray School of Informatics, University of Edinburgh The problem Learn scalar function of vector values f(x).5.5 f(x) y i.5.2.4.6.8 x f 5 5.5 x x 2.5 We have (possibly
Introduction. Chapter 1
 Chapter 1 Introduction In this book we will be concerned with supervised learning, which is the problem of learning input-output mappings from empirical data (the training dataset). Depending on the characteristics
Chapter 1 Introduction In this book we will be concerned with supervised learning, which is the problem of learning input-output mappings from empirical data (the training dataset). Depending on the characteristics
Nonparmeteric Bayes & Gaussian Processes. Baback Moghaddam Machine Learning Group
 Nonparmeteric Bayes & Gaussian Processes Baback Moghaddam baback@jpl.nasa.gov Machine Learning Group Outline Bayesian Inference Hierarchical Models Model Selection Parametric vs. Nonparametric Gaussian
Nonparmeteric Bayes & Gaussian Processes Baback Moghaddam baback@jpl.nasa.gov Machine Learning Group Outline Bayesian Inference Hierarchical Models Model Selection Parametric vs. Nonparametric Gaussian
Modelling and Control of Nonlinear Systems using Gaussian Processes with Partial Model Information
 5st IEEE Conference on Decision and Control December 0-3, 202 Maui, Hawaii, USA Modelling and Control of Nonlinear Systems using Gaussian Processes with Partial Model Information Joseph Hall, Carl Rasmussen
5st IEEE Conference on Decision and Control December 0-3, 202 Maui, Hawaii, USA Modelling and Control of Nonlinear Systems using Gaussian Processes with Partial Model Information Joseph Hall, Carl Rasmussen
Non-Gaussian likelihoods for Gaussian Processes
 Non-Gaussian likelihoods for Gaussian Processes Alan Saul University of Sheffield Outline Motivation Laplace approximation KL method Expectation Propagation Comparing approximations GP regression Model
Non-Gaussian likelihoods for Gaussian Processes Alan Saul University of Sheffield Outline Motivation Laplace approximation KL method Expectation Propagation Comparing approximations GP regression Model
Integrated Non-Factorized Variational Inference
 Integrated Non-Factorized Variational Inference Shaobo Han, Xuejun Liao and Lawrence Carin Duke University February 27, 2014 S. Han et al. Integrated Non-Factorized Variational Inference February 27, 2014
Integrated Non-Factorized Variational Inference Shaobo Han, Xuejun Liao and Lawrence Carin Duke University February 27, 2014 S. Han et al. Integrated Non-Factorized Variational Inference February 27, 2014
Log Gaussian Cox Processes. Chi Group Meeting February 23, 2016
 Log Gaussian Cox Processes Chi Group Meeting February 23, 2016 Outline Typical motivating application Introduction to LGCP model Brief overview of inference Applications in my work just getting started
Log Gaussian Cox Processes Chi Group Meeting February 23, 2016 Outline Typical motivating application Introduction to LGCP model Brief overview of inference Applications in my work just getting started
Neutron inverse kinetics via Gaussian Processes
 Neutron inverse kinetics via Gaussian Processes P. Picca Politecnico di Torino, Torino, Italy R. Furfaro University of Arizona, Tucson, Arizona Outline Introduction Review of inverse kinetics techniques
Neutron inverse kinetics via Gaussian Processes P. Picca Politecnico di Torino, Torino, Italy R. Furfaro University of Arizona, Tucson, Arizona Outline Introduction Review of inverse kinetics techniques
MTTTS16 Learning from Multiple Sources
 MTTTS16 Learning from Multiple Sources 5 ECTS credits Autumn 2018, University of Tampere Lecturer: Jaakko Peltonen Lecture 6: Multitask learning with kernel methods and nonparametric models On this lecture:
MTTTS16 Learning from Multiple Sources 5 ECTS credits Autumn 2018, University of Tampere Lecturer: Jaakko Peltonen Lecture 6: Multitask learning with kernel methods and nonparametric models On this lecture:
Machine Learning. Lecture 4: Regularization and Bayesian Statistics. Feng Li. https://funglee.github.io
 Machine Learning Lecture 4: Regularization and Bayesian Statistics Feng Li fli@sdu.edu.cn https://funglee.github.io School of Computer Science and Technology Shandong University Fall 207 Overfitting Problem
Machine Learning Lecture 4: Regularization and Bayesian Statistics Feng Li fli@sdu.edu.cn https://funglee.github.io School of Computer Science and Technology Shandong University Fall 207 Overfitting Problem
Reinforcement Learning with Reference Tracking Control in Continuous State Spaces
 Reinforcement Learning with Reference Tracking Control in Continuous State Spaces Joseph Hall, Carl Edward Rasmussen and Jan Maciejowski Abstract The contribution described in this paper is an algorithm
Reinforcement Learning with Reference Tracking Control in Continuous State Spaces Joseph Hall, Carl Edward Rasmussen and Jan Maciejowski Abstract The contribution described in this paper is an algorithm
Gaussian processes. Chuong B. Do (updated by Honglak Lee) November 22, 2008
 November 22, 2008") Gaussian processes Chuong B Do (updated by Honglak Lee) November 22, 2008 Many of the classical machine learning algorithms that we talked about during the first half of this course fit the following pattern:
Gaussian processes Chuong B Do (updated by Honglak Lee) November 22, 2008 Many of the classical machine learning algorithms that we talked about during the first half of this course fit the following pattern:
COMP 551 Applied Machine Learning Lecture 19: Bayesian Inference
 COMP 551 Applied Machine Learning Lecture 19: Bayesian Inference Associate Instructor: (herke.vanhoof@mcgill.ca) Class web page: www.cs.mcgill.ca/~jpineau/comp551 Unless otherwise noted, all material posted
COMP 551 Applied Machine Learning Lecture 19: Bayesian Inference Associate Instructor: (herke.vanhoof@mcgill.ca) Class web page: www.cs.mcgill.ca/~jpineau/comp551 Unless otherwise noted, all material posted
Model-Based Reinforcement Learning with Continuous States and Actions
 Marc P. Deisenroth, Carl E. Rasmussen, and Jan Peters: Model-Based Reinforcement Learning with Continuous States and Actions in Proceedings of the 16th European Symposium on Artificial Neural Networks
Marc P. Deisenroth, Carl E. Rasmussen, and Jan Peters: Model-Based Reinforcement Learning with Continuous States and Actions in Proceedings of the 16th European Symposium on Artificial Neural Networks
Lecture 2: From Linear Regression to Kalman Filter and Beyond
 Lecture 2: From Linear Regression to Kalman Filter and Beyond January 18, 2017 Contents 1 Batch and Recursive Estimation 2 Towards Bayesian Filtering 3 Kalman Filter and Bayesian Filtering and Smoothing
Lecture 2: From Linear Regression to Kalman Filter and Beyond January 18, 2017 Contents 1 Batch and Recursive Estimation 2 Towards Bayesian Filtering 3 Kalman Filter and Bayesian Filtering and Smoothing
Probabilistic numerics for deep learning
 Presenter: Shijia Wang Department of Engineering Science, University of Oxford rning (RLSS) Summer School, Montreal 2017 Outline 1 Introduction Probabilistic Numerics 2 Components Probabilistic modeling
Presenter: Shijia Wang Department of Engineering Science, University of Oxford rning (RLSS) Summer School, Montreal 2017 Outline 1 Introduction Probabilistic Numerics 2 Components Probabilistic modeling
Introduction to Gaussian Processes
 Introduction to Gaussian Processes Neil D. Lawrence GPSS 10th June 2013 Book Rasmussen and Williams (2006) Outline The Gaussian Density Covariance from Basis Functions Basis Function Representations Constructing
Introduction to Gaussian Processes Neil D. Lawrence GPSS 10th June 2013 Book Rasmussen and Williams (2006) Outline The Gaussian Density Covariance from Basis Functions Basis Function Representations Constructing
Gaussian Processes for Machine Learning
 Gaussian Processes for Machine Learning Carl Edward Rasmussen Max Planck Institute for Biological Cybernetics Tübingen, Germany carl@tuebingen.mpg.de Carlos III, Madrid, May 2006 The actual science of
Gaussian Processes for Machine Learning Carl Edward Rasmussen Max Planck Institute for Biological Cybernetics Tübingen, Germany carl@tuebingen.mpg.de Carlos III, Madrid, May 2006 The actual science of
CMU-Q Lecture 24:
 CMU-Q 15-381 Lecture 24: Supervised Learning 2 Teacher: Gianni A. Di Caro SUPERVISED LEARNING Hypotheses space Hypothesis function Labeled Given Errors Performance criteria Given a collection of input
CMU-Q 15-381 Lecture 24: Supervised Learning 2 Teacher: Gianni A. Di Caro SUPERVISED LEARNING Hypotheses space Hypothesis function Labeled Given Errors Performance criteria Given a collection of input
Review. DS GA 1002 Statistical and Mathematical Models. Carlos Fernandez-Granda
 Review DS GA 1002 Statistical and Mathematical Models http://www.cims.nyu.edu/~cfgranda/pages/dsga1002_fall16 Carlos Fernandez-Granda Probability and statistics Probability: Framework for dealing with
Review DS GA 1002 Statistical and Mathematical Models http://www.cims.nyu.edu/~cfgranda/pages/dsga1002_fall16 Carlos Fernandez-Granda Probability and statistics Probability: Framework for dealing with
A short introduction to INLA and R-INLA
 A short introduction to INLA and R-INLA Integrated Nested Laplace Approximation Thomas Opitz, BioSP, INRA Avignon Workshop: Theory and practice of INLA and SPDE November 7, 2018 2/21 Plan for this talk
A short introduction to INLA and R-INLA Integrated Nested Laplace Approximation Thomas Opitz, BioSP, INRA Avignon Workshop: Theory and practice of INLA and SPDE November 7, 2018 2/21 Plan for this talk
Variable sigma Gaussian processes: An expectation propagation perspective
 Variable sigma Gaussian processes: An expectation propagation perspective Yuan (Alan) Qi Ahmed H. Abdel-Gawad CS & Statistics Departments, Purdue University ECE Department, Purdue University alanqi@cs.purdue.edu
Variable sigma Gaussian processes: An expectation propagation perspective Yuan (Alan) Qi Ahmed H. Abdel-Gawad CS & Statistics Departments, Purdue University ECE Department, Purdue University alanqi@cs.purdue.edu
Lecture 5: GPs and Streaming regression
 Lecture 5: GPs and Streaming regression Gaussian Processes Information gain Confidence intervals COMP-652 and ECSE-608, Lecture 5 - September 19, 2017 1 Recall: Non-parametric regression Input space X
Lecture 5: GPs and Streaming regression Gaussian Processes Information gain Confidence intervals COMP-652 and ECSE-608, Lecture 5 - September 19, 2017 1 Recall: Non-parametric regression Input space X
Pattern Recognition and Machine Learning. Bishop Chapter 6: Kernel Methods
 Pattern Recognition and Machine Learning Chapter 6: Kernel Methods Vasil Khalidov Alex Kläser December 13, 2007 Training Data: Keep or Discard? Parametric methods (linear/nonlinear) so far: learn parameter
Pattern Recognition and Machine Learning Chapter 6: Kernel Methods Vasil Khalidov Alex Kläser December 13, 2007 Training Data: Keep or Discard? Parametric methods (linear/nonlinear) so far: learn parameter
Introduction to Machine Learning
 Introduction to Machine Learning Brown University CSCI 1950-F, Spring 2012 Prof. Erik Sudderth Lecture 25: Markov Chain Monte Carlo (MCMC) Course Review and Advanced Topics Many figures courtesy Kevin
Introduction to Machine Learning Brown University CSCI 1950-F, Spring 2012 Prof. Erik Sudderth Lecture 25: Markov Chain Monte Carlo (MCMC) Course Review and Advanced Topics Many figures courtesy Kevin
Pattern Recognition and Machine Learning. Bishop Chapter 2: Probability Distributions
 Pattern Recognition and Machine Learning Chapter 2: Probability Distributions Cécile Amblard Alex Kläser Jakob Verbeek October 11, 27 Probability Distributions: General Density Estimation: given a finite
Pattern Recognition and Machine Learning Chapter 2: Probability Distributions Cécile Amblard Alex Kläser Jakob Verbeek October 11, 27 Probability Distributions: General Density Estimation: given a finite
Pattern Recognition and Machine Learning
 Christopher M. Bishop Pattern Recognition and Machine Learning ÖSpri inger Contents Preface Mathematical notation Contents vii xi xiii 1 Introduction 1 1.1 Example: Polynomial Curve Fitting 4 1.2 Probability
Christopher M. Bishop Pattern Recognition and Machine Learning ÖSpri inger Contents Preface Mathematical notation Contents vii xi xiii 1 Introduction 1 1.1 Example: Polynomial Curve Fitting 4 1.2 Probability
Probabilistic Machine Learning. Industrial AI Lab.
 Probabilistic Machine Learning Industrial AI Lab. Probabilistic Linear Regression Outline Probabilistic Classification Probabilistic Clustering Probabilistic Dimension Reduction 2 Probabilistic Linear
Probabilistic Machine Learning Industrial AI Lab. Probabilistic Linear Regression Outline Probabilistic Classification Probabilistic Clustering Probabilistic Dimension Reduction 2 Probabilistic Linear
Gaussian Process Regression
 Gaussian Process Regression 4F1 Pattern Recognition, 21 Carl Edward Rasmussen Department of Engineering, University of Cambridge November 11th - 16th, 21 Rasmussen (Engineering, Cambridge) Gaussian Process
Gaussian Process Regression 4F1 Pattern Recognition, 21 Carl Edward Rasmussen Department of Engineering, University of Cambridge November 11th - 16th, 21 Rasmussen (Engineering, Cambridge) Gaussian Process
Gaussian Process Optimization with Mutual Information
 Gaussian Process Optimization with Mutual Information Emile Contal 1 Vianney Perchet 2 Nicolas Vayatis 1 1 CMLA Ecole Normale Suprieure de Cachan & CNRS, France 2 LPMA Université Paris Diderot & CNRS,
Gaussian Process Optimization with Mutual Information Emile Contal 1 Vianney Perchet 2 Nicolas Vayatis 1 1 CMLA Ecole Normale Suprieure de Cachan & CNRS, France 2 LPMA Université Paris Diderot & CNRS,
Gaussian Process Regression Networks
 Gaussian Process Regression Networks Andrew Gordon Wilson agw38@camacuk mlgengcamacuk/andrew University of Cambridge Joint work with David A Knowles and Zoubin Ghahramani June 27, 2012 ICML, Edinburgh
Gaussian Process Regression Networks Andrew Gordon Wilson agw38@camacuk mlgengcamacuk/andrew University of Cambridge Joint work with David A Knowles and Zoubin Ghahramani June 27, 2012 ICML, Edinburgh
Likelihood NIPS July 30, Gaussian Process Regression with Student-t. Likelihood. Jarno Vanhatalo, Pasi Jylanki and Aki Vehtari NIPS-2009
 with with July 30, 2010 with 1 2 3 Representation Representation for Distribution Inference for the Augmented Model 4 Approximate Laplacian Approximation Introduction to Laplacian Approximation Laplacian
with with July 30, 2010 with 1 2 3 Representation Representation for Distribution Inference for the Augmented Model 4 Approximate Laplacian Approximation Introduction to Laplacian Approximation Laplacian
ECE521 week 3: 23/26 January 2017
 ECE521 week 3: 23/26 January 2017 Outline Probabilistic interpretation of linear regression - Maximum likelihood estimation (MLE) - Maximum a posteriori (MAP) estimation Bias-variance trade-off Linear
ECE521 week 3: 23/26 January 2017 Outline Probabilistic interpretation of linear regression - Maximum likelihood estimation (MLE) - Maximum a posteriori (MAP) estimation Bias-variance trade-off Linear
Statistical Learning Reading Assignments
 Statistical Learning Reading Assignments S. Gong et al. Dynamic Vision: From Images to Face Recognition, Imperial College Press, 2001 (Chapt. 3, hard copy). T. Evgeniou, M. Pontil, and T. Poggio, "Statistical
Statistical Learning Reading Assignments S. Gong et al. Dynamic Vision: From Images to Face Recognition, Imperial College Press, 2001 (Chapt. 3, hard copy). T. Evgeniou, M. Pontil, and T. Poggio, "Statistical
Universität Potsdam Institut für Informatik Lehrstuhl Maschinelles Lernen. Bayesian Learning. Tobias Scheffer, Niels Landwehr
 Universität Potsdam Institut für Informatik Lehrstuhl Maschinelles Lernen Bayesian Learning Tobias Scheffer, Niels Landwehr Remember: Normal Distribution Distribution over x. Density function with parameters
Universität Potsdam Institut für Informatik Lehrstuhl Maschinelles Lernen Bayesian Learning Tobias Scheffer, Niels Landwehr Remember: Normal Distribution Distribution over x. Density function with parameters
Analytic Long-Term Forecasting with Periodic Gaussian Processes
 Nooshin Haji Ghassemi School of Computing Blekinge Institute of Technology Sweden Marc Peter Deisenroth Department of Computing Imperial College London United Kingdom Department of Computer Science TU
Nooshin Haji Ghassemi School of Computing Blekinge Institute of Technology Sweden Marc Peter Deisenroth Department of Computing Imperial College London United Kingdom Department of Computer Science TU
PART I INTRODUCTION The meaning of probability Basic definitions for frequentist statistics and Bayesian inference Bayesian inference Combinatorics
 Table of Preface page xi PART I INTRODUCTION 1 1 The meaning of probability 3 1.1 Classical definition of probability 3 1.2 Statistical definition of probability 9 1.3 Bayesian understanding of probability
Table of Preface page xi PART I INTRODUCTION 1 1 The meaning of probability 3 1.1 Classical definition of probability 3 1.2 Statistical definition of probability 9 1.3 Bayesian understanding of probability
Adaptive Reinforcement Learning
 Adaptive Reinforcement Learning Increasing the applicability for large and time varying systems using parallel Gaussian Process regression and adaptive nonlinear control Delft Center for Systems and Control
Adaptive Reinforcement Learning Increasing the applicability for large and time varying systems using parallel Gaussian Process regression and adaptive nonlinear control Delft Center for Systems and Control
DEPARTMENT OF COMPUTER SCIENCE Autumn Semester MACHINE LEARNING AND ADAPTIVE INTELLIGENCE
 Data Provided: None DEPARTMENT OF COMPUTER SCIENCE Autumn Semester 203 204 MACHINE LEARNING AND ADAPTIVE INTELLIGENCE 2 hours Answer THREE of the four questions. All questions carry equal weight. Figures
Data Provided: None DEPARTMENT OF COMPUTER SCIENCE Autumn Semester 203 204 MACHINE LEARNING AND ADAPTIVE INTELLIGENCE 2 hours Answer THREE of the four questions. All questions carry equal weight. Figures
Introduction to Machine Learning
 Introduction to Machine Learning 12. Gaussian Processes Alex Smola Carnegie Mellon University http://alex.smola.org/teaching/cmu2013-10-701 10-701 The Normal Distribution http://www.gaussianprocess.org/gpml/chapters/
Introduction to Machine Learning 12. Gaussian Processes Alex Smola Carnegie Mellon University http://alex.smola.org/teaching/cmu2013-10-701 10-701 The Normal Distribution http://www.gaussianprocess.org/gpml/chapters/
Classification CE-717: Machine Learning Sharif University of Technology. M. Soleymani Fall 2012
 Classification CE-717: Machine Learning Sharif University of Technology M. Soleymani Fall 2012 Topics Discriminant functions Logistic regression Perceptron Generative models Generative vs. discriminative
Classification CE-717: Machine Learning Sharif University of Technology M. Soleymani Fall 2012 Topics Discriminant functions Logistic regression Perceptron Generative models Generative vs. discriminative
Chapter 4 - Fundamentals of spatial processes Lecture notes
 Chapter 4 - Fundamentals of spatial processes Lecture notes Geir Storvik January 21, 2013 STK4150 - Intro 2 Spatial processes Typically correlation between nearby sites Mostly positive correlation Negative
Chapter 4 - Fundamentals of spatial processes Lecture notes Geir Storvik January 21, 2013 STK4150 - Intro 2 Spatial processes Typically correlation between nearby sites Mostly positive correlation Negative
Introduction to Gaussian Processes
 Introduction to Gaussian Processes 1 Objectives to express prior knowledge/beliefs about model outputs using Gaussian process (GP) to sample functions from the probability measure defined by GP to build
Introduction to Gaussian Processes 1 Objectives to express prior knowledge/beliefs about model outputs using Gaussian process (GP) to sample functions from the probability measure defined by GP to build
A Process over all Stationary Covariance Kernels
 A Process over all Stationary Covariance Kernels Andrew Gordon Wilson June 9, 0 Abstract I define a process over all stationary covariance kernels. I show how one might be able to perform inference that
A Process over all Stationary Covariance Kernels Andrew Gordon Wilson June 9, 0 Abstract I define a process over all stationary covariance kernels. I show how one might be able to perform inference that
Identification of Gaussian Process State-Space Models with Particle Stochastic Approximation EM
 Identification of Gaussian Process State-Space Models with Particle Stochastic Approximation EM Roger Frigola Fredrik Lindsten Thomas B. Schön, Carl E. Rasmussen Dept. of Engineering, University of Cambridge,
Identification of Gaussian Process State-Space Models with Particle Stochastic Approximation EM Roger Frigola Fredrik Lindsten Thomas B. Schön, Carl E. Rasmussen Dept. of Engineering, University of Cambridge,
PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 13: SEQUENTIAL DATA
 PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 13: SEQUENTIAL DATA Contents in latter part Linear Dynamical Systems What is different from HMM? Kalman filter Its strength and limitation Particle Filter
PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 13: SEQUENTIAL DATA Contents in latter part Linear Dynamical Systems What is different from HMM? Kalman filter Its strength and limitation Particle Filter
Probabilistic Models for Learning Data Representations. Andreas Damianou
 Probabilistic Models for Learning Data Representations Andreas Damianou Department of Computer Science, University of Sheffield, UK IBM Research, Nairobi, Kenya, 23/06/2015 Sheffield SITraN Outline Part
Probabilistic Models for Learning Data Representations Andreas Damianou Department of Computer Science, University of Sheffield, UK IBM Research, Nairobi, Kenya, 23/06/2015 Sheffield SITraN Outline Part
Advanced Introduction to Machine Learning CMU-10715
 Advanced Introduction to Machine Learning CMU-10715 Gaussian Processes Barnabás Póczos http://www.gaussianprocess.org/ 2 Some of these slides in the intro are taken from D. Lizotte, R. Parr, C. Guesterin
Advanced Introduction to Machine Learning CMU-10715 Gaussian Processes Barnabás Póczos http://www.gaussianprocess.org/ 2 Some of these slides in the intro are taken from D. Lizotte, R. Parr, C. Guesterin
L09. PARTICLE FILTERING. NA568 Mobile Robotics: Methods & Algorithms
 L09. PARTICLE FILTERING NA568 Mobile Robotics: Methods & Algorithms Particle Filters Different approach to state estimation Instead of parametric description of state (and uncertainty), use a set of state
L09. PARTICLE FILTERING NA568 Mobile Robotics: Methods & Algorithms Particle Filters Different approach to state estimation Instead of parametric description of state (and uncertainty), use a set of state
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: Particle Filter for Localization Dr. Kostas Alexis (CSE) These slides relied on the lectures from C. Stachniss, and the book Probabilistic Robotics from Thurn et al.
Autonomous Mobile Robot Design Topic: Particle Filter for Localization Dr. Kostas Alexis (CSE) These slides relied on the lectures from C. Stachniss, and the book Probabilistic Robotics from Thurn et al.
AUTOMOTIVE ENVIRONMENT SENSORS
 AUTOMOTIVE ENVIRONMENT SENSORS Lecture 5. Localization BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Related concepts Concepts related to vehicles moving
AUTOMOTIVE ENVIRONMENT SENSORS Lecture 5. Localization BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Related concepts Concepts related to vehicles moving
Active and Semi-supervised Kernel Classification
 Active and Semi-supervised Kernel Classification Zoubin Ghahramani Gatsby Computational Neuroscience Unit University College London Work done in collaboration with Xiaojin Zhu (CMU), John Lafferty (CMU),
Active and Semi-supervised Kernel Classification Zoubin Ghahramani Gatsby Computational Neuroscience Unit University College London Work done in collaboration with Xiaojin Zhu (CMU), John Lafferty (CMU),