2D Image Processing (Extended) Kalman and particle filter
|
|
|
- Melissa Wade
- 5 years ago
- Views:
Transcription
1 2D Image Processing (Extended) Kalman and particle filter Prof. Didier Stricker Dr. Gabriele Bleser Kaiserlautern University DFKI Deutsches Forschungszentrum für Künstliche Intelligenz SA-1 Some slides based on S. Thrun and K. Smith
2 Outline Recap: Kalman filter algorithm Extended Kalman filter algorithm Particle Filter 2
3 Recap: linear Gaussian state-space model Process noise Measurement noise 3



4 Recap: Kalman filter Bayes update rule + linear Gaussian models Kalman filter correct measure predict posterior likelihood motion model posterior at t-1 4
5 Recap: Kalman filter algorithm 1. Kalman_filter(μ t-1, Σ t-1, u t, z t ): 2. Prediction: Correction: Requirements: Initial belief is Gaussian Linear Gaussian state-space model 9. Return μ t, Σ t 5
6 Constant velocity model Assuming that the object follows a const. velocity model: Better prediction Still problems in case of accelerations Cont d estimate, even if we don t have measurements 6
7 Kalman filter limitations Applies to linear Gaussian models Many visual tracking problems are nonlinear, e.g. as soon as we move to tracking in 3D 7 Courtesy of G. Panin


8 Humanoid robot catches flying balls Several cameras observe flying balls The 3D trajectory is estimated A robot is supposed to catch the balls nonlinear estimation problem 8 Courtesy of U. Frese
9 SA-1 Extended Kalman filter Slides based on S. Thrun


10 Nonlinear state-space model, Gaussian noise Motion model: Nonlinear function (most general model) Measurement model: Nonlinear function Often used: model with additive noise 10

11 Propagate Gaussian through linear function 11
12 Propagate Gaussian through nonlinear function PDF obtained from Monte Carlo samples + histogramming Then sample mean and covariance 12
13 Bayes update rule Problem: We do not stay in the Gaussian world, if motion and/or measurement models are nonlinear functions of the state Non-Gauss Nonlinear + Gauss Nonlinear + Gauss Gauss No general closed-form solution for Bayes filter Approximate solutions: Keep the functions and approximate distributions Unscented Kalman filter, particle filter Linearize the functions and use again the Kalman filter 13
14 EKF linearization Monte Carlo transform + sample statistics àblue Gaussian First Order Taylor approximation àred Gaussian Mismatch = linearization error 14

15 First order Taylor approximation (multivariate) Jacobian matrix 15


16 EKF linearization of state-space model (additive noise) Jacobian matrix Jacobian matrix 16

17 Extended Kalman filter: additive noise 1. Extended_Kalman_filter(μ t-1, Σ t-1, u t, z t ): 2. Prediction: Gauss approximation formula 5. Correction: Return μ t, Σ t 17

 Jacobians")
18 Linearization of state-space model (non-additive noise) Jacobians Jacobians 18
")
19 Gauss approximation formula (1 st order) derived =0 19

: 2.")

20 Extended Kalman filter: non-additive noise 1. Extended_Kalman_filter(μ t-1, Σ t-1, u t, z t ): 2. Prediction: Correction: Return μ t, Σ t 20
21 EKF linearization: problems Bigger uncertainty à bigger linearization error 21
22 EKF linearization: problems 22
23 EKF linearization: problems Higher local nonlinearity à bigger linearization error 23
24 EKF linearization: problems 24
25 (Extended) Kalman filter: limitations No multimodal distributions 25
26 (Extended) Kalman filter: limitations Unimodal distributions fail for unpredicted motion Prediction too far from actual location to recover 26

27 Extended Kalman filter: summary 27



28 Monte Carlo (particle) approximation Non-parametric representation, as a set of weighted particles PDF of faces appearing in the image 28
29 Filter methods (rules-of-thumb) Linear Gaussian models Bayes Filter Kalman Filter n 1 Kalman Filter banks Particle Filter Nonlinear models, Gaussian noises (Non)linear models, Gaussian noises, multimodal Highly nonlinear models, non-gaussian noises, multimodal Unscented Kalman Filter Extended Kalman Filter 29
30 Particle filters Go by many names: Sequential Monte Carlo Methods Sequential importance resampling (SIR) Bootstrap filters Condensation trackers Survival of the fittest Originally used for problems in Statistics Fluid mechanics Statistical mechanics Signal processing Introduced to the Computer Vision community by Michael Isard and Andrew Blake, CONDENSATION Conditional Density Propagation for Visual Tracking, International Journal of Computer Vision (IJCV), 29, 1, 5--28, (1998) 30
 Wanted: position of the robot in the map")
31 Introductory example Mobile robot localization in a known environment based on motion (odometry) and sensing (door detection) The robot knows a map of the environment (corridor with 3 indistinguishable doors) Wanted: position of the robot in the map 31

32 weight Prior particle distribution (uniform) Initially, the state is unknown. Measurement z 1 : here is a door. Measurement likelihood Posterior particle distribution Particles close to doors have higher weights. 32
33 Resampling: Generate a new particle set by drawing particles (with replacement) with probabilities according to their weights. (Particles with high weights will be duplicated) Odometry input u 1 : 1m forward. Move and diffuse (with noise samples) particles according to the motion model. 33
 with probabilities according")
34 Measurement z 2 : here is a door. Update weights by multiplying with measurement likelihood. Resampling: Generate a new particle set by drawing particles (with replacement) with probabilities according to their weights. 34
35 Particle filter algorithm: overview Initialization: Randomly draw particles from the state-space. Measurement update: Multiply weights with measurement likelihood (plausibility). Resampling: Randomly draw new particles from the old set with probabilities proportional to the weights. Time update: Move particles according to the motion model. This includes diffusing the particles by adding random noise. 35
36 Particle filter algorithm: overview Question: What does the robot know after each step? Initialization: The robot knows nothing. Measurement update: The robot knows that some hypotheses (particles) are more plausible. Resampling: The robot knows the same, but in a different representation. It concentrates its resources on the more likely areas of the state-space. Time update: The robot knows: If I was previously here, I am now here. However, uncertainty grows. 36
 Too few samples Added samples 37")
37 Particle filter Advantages: Easy to implement. Not restricted to Gaussian densities. Handles highly nonlinear functions and multimodal distributions. Very successful in practical applications. Disadvantages: Needs many particles in high-dimensional state-spaces. Precision highly depends on number of particles. Target distribution (Gaussian mixture) Too few samples Added samples 37
38 SA-1 Particle filter in more details Along concrete tracking example Slides based on K. Smith

39 Example: tracking based on color histograms Track girl in pink 39


40 What is a particle? A sample of the posterior Particles contain a state estimate/ hypothesis weight Summing the particles gives an approximation to the target distribution 40

41 What is a particle? Each particle contains a state estimate weight Const. velocity model, fixed bounding box size (could be improved by estimating also the bounding box size) 41
 Diffuse: apply noise to spread particles Measure: weights are assigned by likelihood response Finish: density estimate 42")
42 SIR particle filter Begin with weighted samples from t-1 Resample: draw samples according to {w t-1 } n=1:n Move: apply motion model (no noise) Diffuse: apply noise to spread particles Measure: weights are assigned by likelihood response Finish: density estimate 42 42
 Diffuse: apply noise to spread particles Correction Measure: weights are assigned by likelihood response Posterior Finish: density estimate")
43 Previous estimate Prediction SIR particle filter Begin with weighted samples from t-1 Resample: draw samples according to {w t- 1} n=1:n Move: apply motion model (no noise) Diffuse: apply noise to spread particles Correction Measure: weights are assigned by likelihood response Posterior Finish: density estimate 43

44 SIR particle filter Begin with weighted samples from t
45 Previous estimate Receive posterior estimate from previous time step 45

46 SIR particle filter Resample: draw samples according to {w t-1 } n=1:n N new samples are drawn from the previous set with replacement. New samples are assigned uniform weights
47 Resample N new samples are drawn from the previous set with replacement to prevent degeneracy. Repeated samples occur by design. Weighted sampling with replacement New sample set is given uniform weights 47
48 Resample N new samples are drawn from the previous set with replacement to prevent degeneracy. Repeated samples occur by design. Weighted sampling with replacement New sample set is given uniform weights Samples still in same place, but more likely ones are duplicated 48

49 Degeneracy Failing to resample results in degeneracy. Iteratively propagating the particles and assigning weights tends to make a few samples dominate the rest t Distribution no longer representative 49
50 Resampling 50


51 Naive solution: independent resampling High sampling variance W n-1 w n w 1 w 2 w 3 51

52 Better solution: systematic resampling m W n-1 w n w 1 w 2 w 3 52
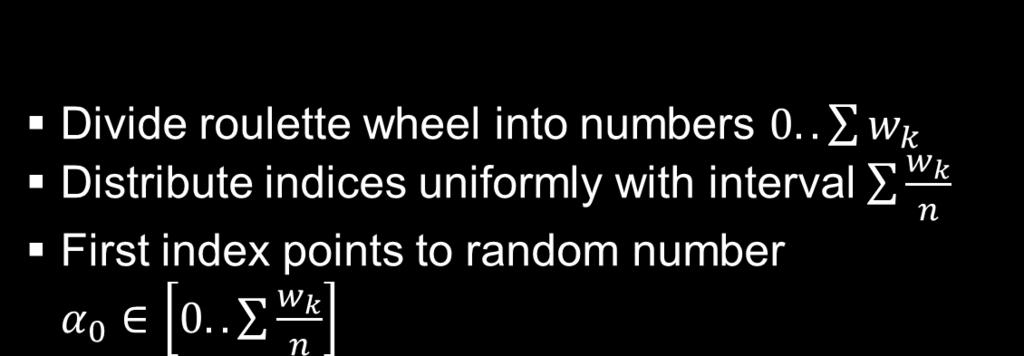
53 Systematic resampling: algorithm W n-1 w n w 1 w 2 w 3 53




54 Systematic resampling: pseudo code 1. Algorithm systematic_resampling(s,n): 2. Initialize empty particle set 3. For Generate cumulative weights 4. Generate random number 5. For Draw samples with replacement 6. While ( ) Search for 1 st interval with cdf > u j Insert into new set (normalized weight) 9. Next index 10. Return S 54
linear motion model p(x t x t-1, u t ) to")
")
55 SIR particle filter: predict Apply the (non-)linear motion model p(x t x t-1, u t ) to every particle! noise Move: apply motion model (no noise) Diffuse: apply noise to spread particles 55 55
 Apply the motion")

56 Motion model (here linear Gaussian) Apply the motion model p(x t x t-1 ) to every particle! linear motion noise model 56



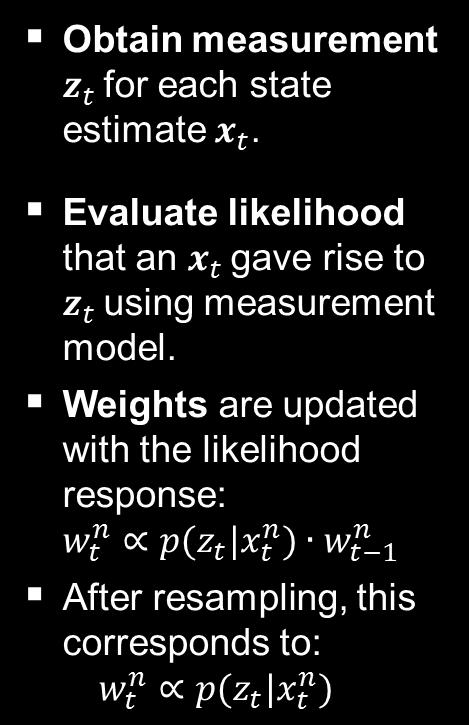
57 SIR particle filter: measure Measure: weights are proportional to the measurement likelihood 57 57
58 Measurement model 58
59 Measurement model 59
60 Measurement model (based on color histograms) LAB space: LAB color histogram designed to approximate human vision L lightness A,B color Measurements are obtained by converting pixel values within bounding boxes to LAB color space, and concatenating to form an AB channel histogram 60
61 Measurement model known color model 61
62 Measurement model poor match good match known color model 62
 Known color model (histogram)")
63 Excursion: Kullback-Leibler divergence Determines, how peaked the likelihood function is Measured color model (histogram) Known color model (histogram) 63

64 Measurement model poor match good match 64
65 Measurement model 65
 Diffuse: apply noise to spread particles Measure: weights are assigned by likelihood response Finish: density estimate 66")
66 SIR particle filter Begin with weighted samples from t-1 Resample: draw samples according to {w t-1 } n=1:n Move: apply motion model (no noise) Diffuse: apply noise to spread particles Measure: weights are assigned by likelihood response Finish: density estimate 66 66
67 Obtaining a solution So far, we do not have an explicit state estimate, we have a cloud of particles! How do we extract an answer? It depends Compute a weighted mean Confidence: inverse variance For discrete labels, this does not work! Use the mode? 67

68 Obtaining a solution 68



69 Particle filter: relation to Bayes update rule
70 Importance sampling principle Target distribution Proposal distribution Indicator function: is 1, if argument true 70
 Video of K.")
71 Particle filters in action Example: head tracking (likelihood based on skin color) Video of K. Smith 71
, 2010 72")
72 Particle filter: people tracking example Uses an adaptive classifier based on Adaboost à past lecture D. Klein, D. Schulz, S. Frintrop, and A. Cremers, Adaptive Real-Time Video Tracking for Arbitrary Objects, International Conference on Intelligent Robots and Systems (IROS),
, 29, 1, 5--28,")
73 Particle filters in action Michael Isard and Andrew Blake CONDENSATION conditional density propagation for visual tracking, International Journal of Computer Vision (IJCV), 29, 1, 5--28, (1998) 73
74 Particle filters in action Tracking a ball Particle filter recovers 1. multi-modal 2. random sampling 74
75 Summary: particle filter algorithm Particle filters are an implementation of recursive Bayesian filtering. They represent the posterior by a set of weighted samples. In the context of localization, the particles are propagated according to the motion model. They are then weighted according to the likelihood of the observations. In a resampling step, new particles are drawn with a probability proportional to their weight. 75
 But use enough to do a good job exploring the state space Complexity grows exponentially with dimensionality of the state space as parallel")
76 Summary: particle filters Represents arbitrary (multimodal) densities Handle nonlinear, non-gaussian systems Concentrate particles on interesting regions (by resampling) Number of samples is important Use as few as necessary (for efficiency) But use enough to do a good job exploring the state space Complexity grows exponentially with dimensionality of the state space as parallel trackers, cost is 3C = 9 Further readings: advanced particle filters are described, e.g. in Probabilistic Robotics by S. Thrun as a joint tracker, cost is C^3 = 27 76
77 SA-1 Thank you!
78 EKF application example Set-up: Two fully calibrated cameras observe a flying ball Measurements: 2D ball positions in each image (feature level) Wanted: (predicted) 3D position of ball 78

79 EKF application example 79


80 Image formation Perspective projection Camera intrinsics Camera translation 80


81 State-space model EKF required + linearization of measurement model 81
 Jacobian")
82 EKF linearization (1 st order Taylor approximation) Jacobian 82
")
83 Measurement Jacobian (4x6) state output???????????????????????? 83
")
84 Measurement Jacobian (4x6) 84
85 Extended Kalman filter (adapted to example) 1. Extended_Kalman_filter(μ t-1, Σ t-1, u t, z t ): 2. Prediction: Correction: Return μ t, Σ t Motion model is linear Nonlinear measurement model has additive noise 85
2D Image Processing. Bayes filter implementation: Kalman filter
 2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Dr. Gabriele Bleser Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche
2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Dr. Gabriele Bleser Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche
2D Image Processing. Bayes filter implementation: Kalman filter
 2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization
 Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras 1 Motivation Recall: Discrete filter Discretize the
Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras 1 Motivation Recall: Discrete filter Discretize the
L09. PARTICLE FILTERING. NA568 Mobile Robotics: Methods & Algorithms
 L09. PARTICLE FILTERING NA568 Mobile Robotics: Methods & Algorithms Particle Filters Different approach to state estimation Instead of parametric description of state (and uncertainty), use a set of state
L09. PARTICLE FILTERING NA568 Mobile Robotics: Methods & Algorithms Particle Filters Different approach to state estimation Instead of parametric description of state (and uncertainty), use a set of state
Modeling and state estimation Examples State estimation Probabilities Bayes filter Particle filter. Modeling. CSC752 Autonomous Robotic Systems
 Modeling CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami February 21, 2017 Outline 1 Modeling and state estimation 2 Examples 3 State estimation 4 Probabilities
Modeling CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami February 21, 2017 Outline 1 Modeling and state estimation 2 Examples 3 State estimation 4 Probabilities
Computer Vision Group Prof. Daniel Cremers. 14. Sampling Methods
 Prof. Daniel Cremers 14. Sampling Methods Sampling Methods Sampling Methods are widely used in Computer Science as an approximation of a deterministic algorithm to represent uncertainty without a parametric
Prof. Daniel Cremers 14. Sampling Methods Sampling Methods Sampling Methods are widely used in Computer Science as an approximation of a deterministic algorithm to represent uncertainty without a parametric
CONDENSATION Conditional Density Propagation for Visual Tracking
 CONDENSATION Conditional Density Propagation for Visual Tracking Michael Isard and Andrew Blake Presented by Neil Alldrin Department of Computer Science & Engineering University of California, San Diego
CONDENSATION Conditional Density Propagation for Visual Tracking Michael Isard and Andrew Blake Presented by Neil Alldrin Department of Computer Science & Engineering University of California, San Diego
Computer Vision Group Prof. Daniel Cremers. 11. Sampling Methods
 Prof. Daniel Cremers 11. Sampling Methods Sampling Methods Sampling Methods are widely used in Computer Science as an approximation of a deterministic algorithm to represent uncertainty without a parametric
Prof. Daniel Cremers 11. Sampling Methods Sampling Methods Sampling Methods are widely used in Computer Science as an approximation of a deterministic algorithm to represent uncertainty without a parametric
PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 13: SEQUENTIAL DATA
 PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 13: SEQUENTIAL DATA Contents in latter part Linear Dynamical Systems What is different from HMM? Kalman filter Its strength and limitation Particle Filter
PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 13: SEQUENTIAL DATA Contents in latter part Linear Dynamical Systems What is different from HMM? Kalman filter Its strength and limitation Particle Filter
Sensor Fusion: Particle Filter
 Sensor Fusion: Particle Filter By: Gordana Stojceska stojcesk@in.tum.de Outline Motivation Applications Fundamentals Tracking People Advantages and disadvantages Summary June 05 JASS '05, St.Petersburg,
Sensor Fusion: Particle Filter By: Gordana Stojceska stojcesk@in.tum.de Outline Motivation Applications Fundamentals Tracking People Advantages and disadvantages Summary June 05 JASS '05, St.Petersburg,
EKF and SLAM. McGill COMP 765 Sept 18 th, 2017
 EKF and SLAM McGill COMP 765 Sept 18 th, 2017 Outline News and information Instructions for paper presentations Continue on Kalman filter: EKF and extension to mapping Example of a real mapping system:
EKF and SLAM McGill COMP 765 Sept 18 th, 2017 Outline News and information Instructions for paper presentations Continue on Kalman filter: EKF and extension to mapping Example of a real mapping system:
Human Pose Tracking I: Basics. David Fleet University of Toronto
 Human Pose Tracking I: Basics David Fleet University of Toronto CIFAR Summer School, 2009 Looking at People Challenges: Complex pose / motion People have many degrees of freedom, comprising an articulated
Human Pose Tracking I: Basics David Fleet University of Toronto CIFAR Summer School, 2009 Looking at People Challenges: Complex pose / motion People have many degrees of freedom, comprising an articulated
Introduction to Machine Learning
 Introduction to Machine Learning Brown University CSCI 1950-F, Spring 2012 Prof. Erik Sudderth Lecture 25: Markov Chain Monte Carlo (MCMC) Course Review and Advanced Topics Many figures courtesy Kevin
Introduction to Machine Learning Brown University CSCI 1950-F, Spring 2012 Prof. Erik Sudderth Lecture 25: Markov Chain Monte Carlo (MCMC) Course Review and Advanced Topics Many figures courtesy Kevin
Bayes Filter Reminder. Kalman Filter Localization. Properties of Gaussians. Gaussians. Prediction. Correction. σ 2. Univariate. 1 2πσ e.
 Kalman Filter Localization Bayes Filter Reminder Prediction Correction Gaussians p(x) ~ N(µ,σ 2 ) : Properties of Gaussians Univariate p(x) = 1 1 2πσ e 2 (x µ) 2 σ 2 µ Univariate -σ σ Multivariate µ Multivariate
Kalman Filter Localization Bayes Filter Reminder Prediction Correction Gaussians p(x) ~ N(µ,σ 2 ) : Properties of Gaussians Univariate p(x) = 1 1 2πσ e 2 (x µ) 2 σ 2 µ Univariate -σ σ Multivariate µ Multivariate
Particle Filters; Simultaneous Localization and Mapping (Intelligent Autonomous Robotics) Subramanian Ramamoorthy School of Informatics
 Subramanian Ramamoorthy School of Informatics") Particle Filters; Simultaneous Localization and Mapping (Intelligent Autonomous Robotics) Subramanian Ramamoorthy School of Informatics Recap: State Estimation using Kalman Filter Project state and error
Particle Filters; Simultaneous Localization and Mapping (Intelligent Autonomous Robotics) Subramanian Ramamoorthy School of Informatics Recap: State Estimation using Kalman Filter Project state and error
CSC487/2503: Foundations of Computer Vision. Visual Tracking. David Fleet
 CSC487/2503: Foundations of Computer Vision Visual Tracking David Fleet Introduction What is tracking? Major players: Dynamics (model of temporal variation of target parameters) Measurements (relation
CSC487/2503: Foundations of Computer Vision Visual Tracking David Fleet Introduction What is tracking? Major players: Dynamics (model of temporal variation of target parameters) Measurements (relation
AUTOMOTIVE ENVIRONMENT SENSORS
 AUTOMOTIVE ENVIRONMENT SENSORS Lecture 5. Localization BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Related concepts Concepts related to vehicles moving
AUTOMOTIVE ENVIRONMENT SENSORS Lecture 5. Localization BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Related concepts Concepts related to vehicles moving
Kalman filtering and friends: Inference in time series models. Herke van Hoof slides mostly by Michael Rubinstein
 Kalman filtering and friends: Inference in time series models Herke van Hoof slides mostly by Michael Rubinstein Problem overview Goal Estimate most probable state at time k using measurement up to time
Kalman filtering and friends: Inference in time series models Herke van Hoof slides mostly by Michael Rubinstein Problem overview Goal Estimate most probable state at time k using measurement up to time
Particle Filters. Pieter Abbeel UC Berkeley EECS. Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics
 Particle Filters Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Motivation For continuous spaces: often no analytical formulas for Bayes filter updates
Particle Filters Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Motivation For continuous spaces: often no analytical formulas for Bayes filter updates
The Particle Filter. PD Dr. Rudolph Triebel Computer Vision Group. Machine Learning for Computer Vision
 The Particle Filter Non-parametric implementation of Bayes filter Represents the belief (posterior) random state samples. by a set of This representation is approximate. Can represent distributions that
The Particle Filter Non-parametric implementation of Bayes filter Represents the belief (posterior) random state samples. by a set of This representation is approximate. Can represent distributions that
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Probabilistic Fundamentals in Robotics Gaussian Filters Course Outline Basic mathematical framework Probabilistic models of mobile robots Mobile
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Probabilistic Fundamentals in Robotics Gaussian Filters Course Outline Basic mathematical framework Probabilistic models of mobile robots Mobile
Why do we care? Measurements. Handling uncertainty over time: predicting, estimating, recognizing, learning. Dealing with time
 Handling uncertainty over time: predicting, estimating, recognizing, learning Chris Atkeson 2004 Why do we care? Speech recognition makes use of dependence of words and phonemes across time. Knowing where
Handling uncertainty over time: predicting, estimating, recognizing, learning Chris Atkeson 2004 Why do we care? Speech recognition makes use of dependence of words and phonemes across time. Knowing where
Robotics. Mobile Robotics. Marc Toussaint U Stuttgart
 Robotics Mobile Robotics State estimation, Bayes filter, odometry, particle filter, Kalman filter, SLAM, joint Bayes filter, EKF SLAM, particle SLAM, graph-based SLAM Marc Toussaint U Stuttgart DARPA Grand
Robotics Mobile Robotics State estimation, Bayes filter, odometry, particle filter, Kalman filter, SLAM, joint Bayes filter, EKF SLAM, particle SLAM, graph-based SLAM Marc Toussaint U Stuttgart DARPA Grand
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: Extended Kalman Filter Dr. Kostas Alexis (CSE) These slides relied on the lectures from C. Stachniss, J. Sturm and the book Probabilistic Robotics from Thurn et al.
Autonomous Mobile Robot Design Topic: Extended Kalman Filter Dr. Kostas Alexis (CSE) These slides relied on the lectures from C. Stachniss, J. Sturm and the book Probabilistic Robotics from Thurn et al.
Autonomous Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 6.2: Kalman Filter Jürgen Sturm Technische Universität München Motivation Bayes filter is a useful tool for state
Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 6.2: Kalman Filter Jürgen Sturm Technische Universität München Motivation Bayes filter is a useful tool for state
Probabilistic Fundamentals in Robotics. DAUIN Politecnico di Torino July 2010
 Probabilistic Fundamentals in Robotics Gaussian Filters Basilio Bona DAUIN Politecnico di Torino July 2010 Course Outline Basic mathematical framework Probabilistic models of mobile robots Mobile robot
Probabilistic Fundamentals in Robotics Gaussian Filters Basilio Bona DAUIN Politecnico di Torino July 2010 Course Outline Basic mathematical framework Probabilistic models of mobile robots Mobile robot
Robert Collins CSE586, PSU Intro to Sampling Methods
 Intro to Sampling Methods CSE586 Computer Vision II Penn State Univ Topics to be Covered Monte Carlo Integration Sampling and Expected Values Inverse Transform Sampling (CDF) Ancestral Sampling Rejection
Intro to Sampling Methods CSE586 Computer Vision II Penn State Univ Topics to be Covered Monte Carlo Integration Sampling and Expected Values Inverse Transform Sampling (CDF) Ancestral Sampling Rejection
Particle Filters. Outline
 Particle Filters M. Sami Fadali Professor of EE University of Nevada Outline Monte Carlo integration. Particle filter. Importance sampling. Degeneracy Resampling Example. 1 2 Monte Carlo Integration Numerical
Particle Filters M. Sami Fadali Professor of EE University of Nevada Outline Monte Carlo integration. Particle filter. Importance sampling. Degeneracy Resampling Example. 1 2 Monte Carlo Integration Numerical
Robotics. Lecture 4: Probabilistic Robotics. See course website for up to date information.
 Robotics Lecture 4: Probabilistic Robotics See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College London Review: Sensors
Robotics Lecture 4: Probabilistic Robotics See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College London Review: Sensors
Robert Collins CSE586, PSU Intro to Sampling Methods
 Intro to Sampling Methods CSE586 Computer Vision II Penn State Univ Topics to be Covered Monte Carlo Integration Sampling and Expected Values Inverse Transform Sampling (CDF) Ancestral Sampling Rejection
Intro to Sampling Methods CSE586 Computer Vision II Penn State Univ Topics to be Covered Monte Carlo Integration Sampling and Expected Values Inverse Transform Sampling (CDF) Ancestral Sampling Rejection
Sensor Tasking and Control
 Sensor Tasking and Control Sensing Networking Leonidas Guibas Stanford University Computation CS428 Sensor systems are about sensing, after all... System State Continuous and Discrete Variables The quantities
Sensor Tasking and Control Sensing Networking Leonidas Guibas Stanford University Computation CS428 Sensor systems are about sensing, after all... System State Continuous and Discrete Variables The quantities
Probabilistic Fundamentals in Robotics
 Probabilistic Fundamentals in Robotics Probabilistic Models of Mobile Robots Robot localization Basilio Bona DAUIN Politecnico di Torino June 2011 Course Outline Basic mathematical framework Probabilistic
Probabilistic Fundamentals in Robotics Probabilistic Models of Mobile Robots Robot localization Basilio Bona DAUIN Politecnico di Torino June 2011 Course Outline Basic mathematical framework Probabilistic
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: Particle Filter for Localization Dr. Kostas Alexis (CSE) These slides relied on the lectures from C. Stachniss, and the book Probabilistic Robotics from Thurn et al.
Autonomous Mobile Robot Design Topic: Particle Filter for Localization Dr. Kostas Alexis (CSE) These slides relied on the lectures from C. Stachniss, and the book Probabilistic Robotics from Thurn et al.
Probabilistic Fundamentals in Robotics. DAUIN Politecnico di Torino July 2010
 Probabilistic Fundamentals in Robotics Probabilistic Models of Mobile Robots Robot localization Basilio Bona DAUIN Politecnico di Torino July 2010 Course Outline Basic mathematical framework Probabilistic
Probabilistic Fundamentals in Robotics Probabilistic Models of Mobile Robots Robot localization Basilio Bona DAUIN Politecnico di Torino July 2010 Course Outline Basic mathematical framework Probabilistic
ECE276A: Sensing & Estimation in Robotics Lecture 10: Gaussian Mixture and Particle Filtering
 ECE276A: Sensing & Estimation in Robotics Lecture 10: Gaussian Mixture and Particle Filtering Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Siwei Guo: s9guo@eng.ucsd.edu Anwesan Pal:
ECE276A: Sensing & Estimation in Robotics Lecture 10: Gaussian Mixture and Particle Filtering Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Siwei Guo: s9guo@eng.ucsd.edu Anwesan Pal:
Why do we care? Examples. Bayes Rule. What room am I in? Handling uncertainty over time: predicting, estimating, recognizing, learning
 Handling uncertainty over time: predicting, estimating, recognizing, learning Chris Atkeson 004 Why do we care? Speech recognition makes use of dependence of words and phonemes across time. Knowing where
Handling uncertainty over time: predicting, estimating, recognizing, learning Chris Atkeson 004 Why do we care? Speech recognition makes use of dependence of words and phonemes across time. Knowing where
Using the Kalman filter Extended Kalman filter
 Using he Kalman filer Eended Kalman filer Doz. G. Bleser Prof. Sricker Compuer Vision: Objec and People Tracking SA- Ouline Recap: Kalman filer algorihm Using Kalman filers Eended Kalman filer algorihm
Using he Kalman filer Eended Kalman filer Doz. G. Bleser Prof. Sricker Compuer Vision: Objec and People Tracking SA- Ouline Recap: Kalman filer algorihm Using Kalman filers Eended Kalman filer algorihm
Markov chain Monte Carlo methods for visual tracking
 Markov chain Monte Carlo methods for visual tracking Ray Luo rluo@cory.eecs.berkeley.edu Department of Electrical Engineering and Computer Sciences University of California, Berkeley Berkeley, CA 94720
Markov chain Monte Carlo methods for visual tracking Ray Luo rluo@cory.eecs.berkeley.edu Department of Electrical Engineering and Computer Sciences University of California, Berkeley Berkeley, CA 94720
The Unscented Particle Filter
 The Unscented Particle Filter Rudolph van der Merwe (OGI) Nando de Freitas (UC Bereley) Arnaud Doucet (Cambridge University) Eric Wan (OGI) Outline Optimal Estimation & Filtering Optimal Recursive Bayesian
The Unscented Particle Filter Rudolph van der Merwe (OGI) Nando de Freitas (UC Bereley) Arnaud Doucet (Cambridge University) Eric Wan (OGI) Outline Optimal Estimation & Filtering Optimal Recursive Bayesian
Lecture 2: From Linear Regression to Kalman Filter and Beyond
 Lecture 2: From Linear Regression to Kalman Filter and Beyond Department of Biomedical Engineering and Computational Science Aalto University January 26, 2012 Contents 1 Batch and Recursive Estimation
Lecture 2: From Linear Regression to Kalman Filter and Beyond Department of Biomedical Engineering and Computational Science Aalto University January 26, 2012 Contents 1 Batch and Recursive Estimation
Lecture 2: From Linear Regression to Kalman Filter and Beyond
 Lecture 2: From Linear Regression to Kalman Filter and Beyond January 18, 2017 Contents 1 Batch and Recursive Estimation 2 Towards Bayesian Filtering 3 Kalman Filter and Bayesian Filtering and Smoothing
Lecture 2: From Linear Regression to Kalman Filter and Beyond January 18, 2017 Contents 1 Batch and Recursive Estimation 2 Towards Bayesian Filtering 3 Kalman Filter and Bayesian Filtering and Smoothing
Mobile Robot Localization
 Mobile Robot Localization 1 The Problem of Robot Localization Given a map of the environment, how can a robot determine its pose (planar coordinates + orientation)? Two sources of uncertainty: - observations
Mobile Robot Localization 1 The Problem of Robot Localization Given a map of the environment, how can a robot determine its pose (planar coordinates + orientation)? Two sources of uncertainty: - observations
Efficient Monitoring for Planetary Rovers
 International Symposium on Artificial Intelligence and Robotics in Space (isairas), May, 2003 Efficient Monitoring for Planetary Rovers Vandi Verma vandi@ri.cmu.edu Geoff Gordon ggordon@cs.cmu.edu Carnegie
International Symposium on Artificial Intelligence and Robotics in Space (isairas), May, 2003 Efficient Monitoring for Planetary Rovers Vandi Verma vandi@ri.cmu.edu Geoff Gordon ggordon@cs.cmu.edu Carnegie
L11. EKF SLAM: PART I. NA568 Mobile Robotics: Methods & Algorithms
 L11. EKF SLAM: PART I NA568 Mobile Robotics: Methods & Algorithms Today s Topic EKF Feature-Based SLAM State Representation Process / Observation Models Landmark Initialization Robot-Landmark Correlation
L11. EKF SLAM: PART I NA568 Mobile Robotics: Methods & Algorithms Today s Topic EKF Feature-Based SLAM State Representation Process / Observation Models Landmark Initialization Robot-Landmark Correlation
Self Adaptive Particle Filter
 Self Adaptive Particle Filter Alvaro Soto Pontificia Universidad Catolica de Chile Department of Computer Science Vicuna Mackenna 4860 (143), Santiago 22, Chile asoto@ing.puc.cl Abstract The particle filter
Self Adaptive Particle Filter Alvaro Soto Pontificia Universidad Catolica de Chile Department of Computer Science Vicuna Mackenna 4860 (143), Santiago 22, Chile asoto@ing.puc.cl Abstract The particle filter
Mobile Robot Localization
 Mobile Robot Localization 1 The Problem of Robot Localization Given a map of the environment, how can a robot determine its pose (planar coordinates + orientation)? Two sources of uncertainty: - observations
Mobile Robot Localization 1 The Problem of Robot Localization Given a map of the environment, how can a robot determine its pose (planar coordinates + orientation)? Two sources of uncertainty: - observations
Recursive Bayes Filtering
 Recursive Bayes Filtering CS485 Autonomous Robotics Amarda Shehu Fall 2013 Notes modified from Wolfram Burgard, University of Freiburg Physical Agents are Inherently Uncertain Uncertainty arises from four
Recursive Bayes Filtering CS485 Autonomous Robotics Amarda Shehu Fall 2013 Notes modified from Wolfram Burgard, University of Freiburg Physical Agents are Inherently Uncertain Uncertainty arises from four
Density Propagation for Continuous Temporal Chains Generative and Discriminative Models
 $ Technical Report, University of Toronto, CSRG-501, October 2004 Density Propagation for Continuous Temporal Chains Generative and Discriminative Models Cristian Sminchisescu and Allan Jepson Department
$ Technical Report, University of Toronto, CSRG-501, October 2004 Density Propagation for Continuous Temporal Chains Generative and Discriminative Models Cristian Sminchisescu and Allan Jepson Department
Lecture 7: Optimal Smoothing
 Department of Biomedical Engineering and Computational Science Aalto University March 17, 2011 Contents 1 What is Optimal Smoothing? 2 Bayesian Optimal Smoothing Equations 3 Rauch-Tung-Striebel Smoother
Department of Biomedical Engineering and Computational Science Aalto University March 17, 2011 Contents 1 What is Optimal Smoothing? 2 Bayesian Optimal Smoothing Equations 3 Rauch-Tung-Striebel Smoother
Content.
 Content Fundamentals of Bayesian Techniques (E. Sucar) Bayesian Filters (O. Aycard) Definition & interests Implementations Hidden Markov models Discrete Bayesian Filters or Markov localization Kalman filters
Content Fundamentals of Bayesian Techniques (E. Sucar) Bayesian Filters (O. Aycard) Definition & interests Implementations Hidden Markov models Discrete Bayesian Filters or Markov localization Kalman filters
Results: MCMC Dancers, q=10, n=500
 Motivation Sampling Methods for Bayesian Inference How to track many INTERACTING targets? A Tutorial Frank Dellaert Results: MCMC Dancers, q=10, n=500 1 Probabilistic Topological Maps Results Real-Time
Motivation Sampling Methods for Bayesian Inference How to track many INTERACTING targets? A Tutorial Frank Dellaert Results: MCMC Dancers, q=10, n=500 1 Probabilistic Topological Maps Results Real-Time
CS491/691: Introduction to Aerial Robotics
 CS491/691: Introduction to Aerial Robotics Topic: State Estimation Dr. Kostas Alexis (CSE) World state (or system state) Belief state: Our belief/estimate of the world state World state: Real state of
CS491/691: Introduction to Aerial Robotics Topic: State Estimation Dr. Kostas Alexis (CSE) World state (or system state) Belief state: Our belief/estimate of the world state World state: Real state of
The Kalman Filter ImPr Talk
 The Kalman Filter ImPr Talk Ged Ridgway Centre for Medical Image Computing November, 2006 Outline What is the Kalman Filter? State Space Models Kalman Filter Overview Bayesian Updating of Estimates Kalman
The Kalman Filter ImPr Talk Ged Ridgway Centre for Medical Image Computing November, 2006 Outline What is the Kalman Filter? State Space Models Kalman Filter Overview Bayesian Updating of Estimates Kalman
Bayesian Methods / G.D. Hager S. Leonard
 Bayesian Methods Recall Robot Localization Given Sensor readings z 1, z 2,, z t = z 1:t Known control inputs u 0, u 1, u t = u 0:t Known model t+1 t, u t ) with initial 1 u 0 ) Known map z t t ) Compute
Bayesian Methods Recall Robot Localization Given Sensor readings z 1, z 2,, z t = z 1:t Known control inputs u 0, u 1, u t = u 0:t Known model t+1 t, u t ) with initial 1 u 0 ) Known map z t t ) Compute
EVALUATING SYMMETRIC INFORMATION GAP BETWEEN DYNAMICAL SYSTEMS USING PARTICLE FILTER
 EVALUATING SYMMETRIC INFORMATION GAP BETWEEN DYNAMICAL SYSTEMS USING PARTICLE FILTER Zhen Zhen 1, Jun Young Lee 2, and Abdus Saboor 3 1 Mingde College, Guizhou University, China zhenz2000@21cn.com 2 Department
EVALUATING SYMMETRIC INFORMATION GAP BETWEEN DYNAMICAL SYSTEMS USING PARTICLE FILTER Zhen Zhen 1, Jun Young Lee 2, and Abdus Saboor 3 1 Mingde College, Guizhou University, China zhenz2000@21cn.com 2 Department
Par$cle Filters Part I: Theory. Peter Jan van Leeuwen Data- Assimila$on Research Centre DARC University of Reading
 Par$cle Filters Part I: Theory Peter Jan van Leeuwen Data- Assimila$on Research Centre DARC University of Reading Reading July 2013 Why Data Assimila$on Predic$on Model improvement: - Parameter es$ma$on
Par$cle Filters Part I: Theory Peter Jan van Leeuwen Data- Assimila$on Research Centre DARC University of Reading Reading July 2013 Why Data Assimila$on Predic$on Model improvement: - Parameter es$ma$on
Expectation Propagation Algorithm
 Expectation Propagation Algorithm 1 Shuang Wang School of Electrical and Computer Engineering University of Oklahoma, Tulsa, OK, 74135 Email: {shuangwang}@ou.edu This note contains three parts. First,
Expectation Propagation Algorithm 1 Shuang Wang School of Electrical and Computer Engineering University of Oklahoma, Tulsa, OK, 74135 Email: {shuangwang}@ou.edu This note contains three parts. First,
Robotics 2 Target Tracking. Kai Arras, Cyrill Stachniss, Maren Bennewitz, Wolfram Burgard
 Robotics 2 Target Tracking Kai Arras, Cyrill Stachniss, Maren Bennewitz, Wolfram Burgard Slides by Kai Arras, Gian Diego Tipaldi, v.1.1, Jan 2012 Chapter Contents Target Tracking Overview Applications
Robotics 2 Target Tracking Kai Arras, Cyrill Stachniss, Maren Bennewitz, Wolfram Burgard Slides by Kai Arras, Gian Diego Tipaldi, v.1.1, Jan 2012 Chapter Contents Target Tracking Overview Applications
CIS 390 Fall 2016 Robotics: Planning and Perception Final Review Questions
 CIS 390 Fall 2016 Robotics: Planning and Perception Final Review Questions December 14, 2016 Questions Throughout the following questions we will assume that x t is the state vector at time t, z t is the
CIS 390 Fall 2016 Robotics: Planning and Perception Final Review Questions December 14, 2016 Questions Throughout the following questions we will assume that x t is the state vector at time t, z t is the
Dynamic models 1 Kalman filters, linearization,
 Koller & Friedman: Chapter 16 Jordan: Chapters 13, 15 Uri Lerner s Thesis: Chapters 3,9 Dynamic models 1 Kalman filters, linearization, Switching KFs, Assumed density filters Probabilistic Graphical Models
Koller & Friedman: Chapter 16 Jordan: Chapters 13, 15 Uri Lerner s Thesis: Chapters 3,9 Dynamic models 1 Kalman filters, linearization, Switching KFs, Assumed density filters Probabilistic Graphical Models
SLAM Techniques and Algorithms. Jack Collier. Canada. Recherche et développement pour la défense Canada. Defence Research and Development Canada
 SLAM Techniques and Algorithms Jack Collier Defence Research and Development Canada Recherche et développement pour la défense Canada Canada Goals What will we learn Gain an appreciation for what SLAM
SLAM Techniques and Algorithms Jack Collier Defence Research and Development Canada Recherche et développement pour la défense Canada Canada Goals What will we learn Gain an appreciation for what SLAM
Nonparametric Bayesian Methods (Gaussian Processes)
") [70240413 Statistical Machine Learning, Spring, 2015] Nonparametric Bayesian Methods (Gaussian Processes) Jun Zhu dcszj@mail.tsinghua.edu.cn http://bigml.cs.tsinghua.edu.cn/~jun State Key Lab of Intelligent
[70240413 Statistical Machine Learning, Spring, 2015] Nonparametric Bayesian Methods (Gaussian Processes) Jun Zhu dcszj@mail.tsinghua.edu.cn http://bigml.cs.tsinghua.edu.cn/~jun State Key Lab of Intelligent
CSEP 573: Artificial Intelligence
 CSEP 573: Artificial Intelligence Hidden Markov Models Luke Zettlemoyer Many slides over the course adapted from either Dan Klein, Stuart Russell, Andrew Moore, Ali Farhadi, or Dan Weld 1 Outline Probabilistic
CSEP 573: Artificial Intelligence Hidden Markov Models Luke Zettlemoyer Many slides over the course adapted from either Dan Klein, Stuart Russell, Andrew Moore, Ali Farhadi, or Dan Weld 1 Outline Probabilistic
Probabilistic Graphical Models
 Probabilistic Graphical Models Brown University CSCI 2950-P, Spring 2013 Prof. Erik Sudderth Lecture 13: Learning in Gaussian Graphical Models, Non-Gaussian Inference, Monte Carlo Methods Some figures
Probabilistic Graphical Models Brown University CSCI 2950-P, Spring 2013 Prof. Erik Sudderth Lecture 13: Learning in Gaussian Graphical Models, Non-Gaussian Inference, Monte Carlo Methods Some figures
Lecture: Gaussian Process Regression. STAT 6474 Instructor: Hongxiao Zhu
 Lecture: Gaussian Process Regression STAT 6474 Instructor: Hongxiao Zhu Motivation Reference: Marc Deisenroth s tutorial on Robot Learning. 2 Fast Learning for Autonomous Robots with Gaussian Processes
Lecture: Gaussian Process Regression STAT 6474 Instructor: Hongxiao Zhu Motivation Reference: Marc Deisenroth s tutorial on Robot Learning. 2 Fast Learning for Autonomous Robots with Gaussian Processes
Part 1: Expectation Propagation
 Chalmers Machine Learning Summer School Approximate message passing and biomedicine Part 1: Expectation Propagation Tom Heskes Machine Learning Group, Institute for Computing and Information Sciences Radboud
Chalmers Machine Learning Summer School Approximate message passing and biomedicine Part 1: Expectation Propagation Tom Heskes Machine Learning Group, Institute for Computing and Information Sciences Radboud
Kalman Filter Computer Vision (Kris Kitani) Carnegie Mellon University
 Carnegie Mellon University") Kalman Filter 16-385 Computer Vision (Kris Kitani) Carnegie Mellon University Examples up to now have been discrete (binary) random variables Kalman filtering can be seen as a special case of a temporal
Kalman Filter 16-385 Computer Vision (Kris Kitani) Carnegie Mellon University Examples up to now have been discrete (binary) random variables Kalman filtering can be seen as a special case of a temporal
E190Q Lecture 10 Autonomous Robot Navigation
 E190Q Lecture 10 Autonomous Robot Navigation Instructor: Chris Clark Semester: Spring 2015 1 Figures courtesy of Siegwart & Nourbakhsh Kilobots 2 https://www.youtube.com/watch?v=2ialuwgafd0 Control Structures
E190Q Lecture 10 Autonomous Robot Navigation Instructor: Chris Clark Semester: Spring 2015 1 Figures courtesy of Siegwart & Nourbakhsh Kilobots 2 https://www.youtube.com/watch?v=2ialuwgafd0 Control Structures
Robot Mapping. Least Squares. Cyrill Stachniss
 Robot Mapping Least Squares Cyrill Stachniss 1 Three Main SLAM Paradigms Kalman filter Particle filter Graphbased least squares approach to SLAM 2 Least Squares in General Approach for computing a solution
Robot Mapping Least Squares Cyrill Stachniss 1 Three Main SLAM Paradigms Kalman filter Particle filter Graphbased least squares approach to SLAM 2 Least Squares in General Approach for computing a solution
arxiv: v1 [cs.ro] 1 May 2015
![arxiv: v1 [cs.ro] 1 May 2015](/thumbs/89/100992593.jpg "arxiv: v1 [cs.ro] 1 May 2015") 215 IEEE International Conference on Robotics and Automation (ICRA) May 26-3, 215. Seattle, USA The Coordinate Particle Filter - A novel Particle Filter for High Dimensional Systems Manuel Wüthrich 1,
215 IEEE International Conference on Robotics and Automation (ICRA) May 26-3, 215. Seattle, USA The Coordinate Particle Filter - A novel Particle Filter for High Dimensional Systems Manuel Wüthrich 1,
PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 2: PROBABILITY DISTRIBUTIONS
 PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 2: PROBABILITY DISTRIBUTIONS Parametric Distributions Basic building blocks: Need to determine given Representation: or? Recall Curve Fitting Binary Variables
PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 2: PROBABILITY DISTRIBUTIONS Parametric Distributions Basic building blocks: Need to determine given Representation: or? Recall Curve Fitting Binary Variables
Lecture : Probabilistic Machine Learning
 Lecture : Probabilistic Machine Learning Riashat Islam Reasoning and Learning Lab McGill University September 11, 2018 ML : Many Methods with Many Links Modelling Views of Machine Learning Machine Learning
Lecture : Probabilistic Machine Learning Riashat Islam Reasoning and Learning Lab McGill University September 11, 2018 ML : Many Methods with Many Links Modelling Views of Machine Learning Machine Learning
Linear Dynamical Systems
 Linear Dynamical Systems Sargur N. srihari@cedar.buffalo.edu Machine Learning Course: http://www.cedar.buffalo.edu/~srihari/cse574/index.html Two Models Described by Same Graph Latent variables Observations
Linear Dynamical Systems Sargur N. srihari@cedar.buffalo.edu Machine Learning Course: http://www.cedar.buffalo.edu/~srihari/cse574/index.html Two Models Described by Same Graph Latent variables Observations
EKF, UKF. Pieter Abbeel UC Berkeley EECS. Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics
 EKF, UKF Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Kalman Filter Kalman Filter = special case of a Bayes filter with dynamics model and sensory
EKF, UKF Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Kalman Filter Kalman Filter = special case of a Bayes filter with dynamics model and sensory
EKF, UKF. Pieter Abbeel UC Berkeley EECS. Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics
 EKF, UKF Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Kalman Filter Kalman Filter = special case of a Bayes filter with dynamics model and sensory
EKF, UKF Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Kalman Filter Kalman Filter = special case of a Bayes filter with dynamics model and sensory
9 Multi-Model State Estimation
 Technion Israel Institute of Technology, Department of Electrical Engineering Estimation and Identification in Dynamical Systems (048825) Lecture Notes, Fall 2009, Prof. N. Shimkin 9 Multi-Model State
Technion Israel Institute of Technology, Department of Electrical Engineering Estimation and Identification in Dynamical Systems (048825) Lecture Notes, Fall 2009, Prof. N. Shimkin 9 Multi-Model State
Lecture 6: Multiple Model Filtering, Particle Filtering and Other Approximations
 Lecture 6: Multiple Model Filtering, Particle Filtering and Other Approximations Department of Biomedical Engineering and Computational Science Aalto University April 28, 2010 Contents 1 Multiple Model
Lecture 6: Multiple Model Filtering, Particle Filtering and Other Approximations Department of Biomedical Engineering and Computational Science Aalto University April 28, 2010 Contents 1 Multiple Model
Blind Equalization via Particle Filtering
 Blind Equalization via Particle Filtering Yuki Yoshida, Kazunori Hayashi, Hideaki Sakai Department of System Science, Graduate School of Informatics, Kyoto University Historical Remarks A sequential Monte
Blind Equalization via Particle Filtering Yuki Yoshida, Kazunori Hayashi, Hideaki Sakai Department of System Science, Graduate School of Informatics, Kyoto University Historical Remarks A sequential Monte
Answers and expectations
 Answers and expectations For a function f(x) and distribution P(x), the expectation of f with respect to P is The expectation is the average of f, when x is drawn from the probability distribution P E
Answers and expectations For a function f(x) and distribution P(x), the expectation of f with respect to P is The expectation is the average of f, when x is drawn from the probability distribution P E
CSE 473: Artificial Intelligence
 CSE 473: Artificial Intelligence Hidden Markov Models Dieter Fox --- University of Washington [Most slides were created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All CS188 materials
CSE 473: Artificial Intelligence Hidden Markov Models Dieter Fox --- University of Washington [Most slides were created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All CS188 materials
1 Kalman Filter Introduction
 1 Kalman Filter Introduction You should first read Chapter 1 of Stochastic models, estimation, and control: Volume 1 by Peter S. Maybec (available here). 1.1 Explanation of Equations (1-3) and (1-4) Equation
1 Kalman Filter Introduction You should first read Chapter 1 of Stochastic models, estimation, and control: Volume 1 by Peter S. Maybec (available here). 1.1 Explanation of Equations (1-3) and (1-4) Equation
Particle lter for mobile robot tracking and localisation
 Particle lter for mobile robot tracking and localisation Tinne De Laet K.U.Leuven, Dept. Werktuigkunde 19 oktober 2005 Particle lter 1 Overview Goal Introduction Particle lter Simulations Particle lter
Particle lter for mobile robot tracking and localisation Tinne De Laet K.U.Leuven, Dept. Werktuigkunde 19 oktober 2005 Particle lter 1 Overview Goal Introduction Particle lter Simulations Particle lter
L06. LINEAR KALMAN FILTERS. NA568 Mobile Robotics: Methods & Algorithms
 L06. LINEAR KALMAN FILTERS NA568 Mobile Robotics: Methods & Algorithms 2 PS2 is out! Landmark-based Localization: EKF, UKF, PF Today s Lecture Minimum Mean Square Error (MMSE) Linear Kalman Filter Gaussian
L06. LINEAR KALMAN FILTERS NA568 Mobile Robotics: Methods & Algorithms 2 PS2 is out! Landmark-based Localization: EKF, UKF, PF Today s Lecture Minimum Mean Square Error (MMSE) Linear Kalman Filter Gaussian
Variable Resolution Particle Filter
 In Proceedings of the International Joint Conference on Artificial intelligence (IJCAI) August 2003. 1 Variable Resolution Particle Filter Vandi Verma, Sebastian Thrun and Reid Simmons Carnegie Mellon
In Proceedings of the International Joint Conference on Artificial intelligence (IJCAI) August 2003. 1 Variable Resolution Particle Filter Vandi Verma, Sebastian Thrun and Reid Simmons Carnegie Mellon
Lecture Outline. Target Tracking: Lecture 3 Maneuvering Target Tracking Issues. Maneuver Illustration. Maneuver Illustration. Maneuver Detection
 REGLERTEKNIK Lecture Outline AUTOMATIC CONTROL Target Tracking: Lecture 3 Maneuvering Target Tracking Issues Maneuver Detection Emre Özkan emre@isy.liu.se Division of Automatic Control Department of Electrical
REGLERTEKNIK Lecture Outline AUTOMATIC CONTROL Target Tracking: Lecture 3 Maneuvering Target Tracking Issues Maneuver Detection Emre Özkan emre@isy.liu.se Division of Automatic Control Department of Electrical
Parallel Particle Filter in Julia
 Parallel Particle Filter in Julia Gustavo Goretkin December 12, 2011 1 / 27 First a disclaimer The project in a sentence. workings 2 / 27 First a disclaimer First a disclaimer The project in a sentence.
Parallel Particle Filter in Julia Gustavo Goretkin December 12, 2011 1 / 27 First a disclaimer The project in a sentence. workings 2 / 27 First a disclaimer First a disclaimer The project in a sentence.
Robots Autónomos. Depto. CCIA. 2. Bayesian Estimation and sensor models. Domingo Gallardo
 Robots Autónomos 2. Bayesian Estimation and sensor models Domingo Gallardo Depto. CCIA http://www.rvg.ua.es/master/robots References Recursive State Estimation: Thrun, chapter 2 Sensor models and robot
Robots Autónomos 2. Bayesian Estimation and sensor models Domingo Gallardo Depto. CCIA http://www.rvg.ua.es/master/robots References Recursive State Estimation: Thrun, chapter 2 Sensor models and robot
Rao-Blackwellized Particle Filter for Multiple Target Tracking
 Rao-Blackwellized Particle Filter for Multiple Target Tracking Simo Särkkä, Aki Vehtari, Jouko Lampinen Helsinki University of Technology, Finland Abstract In this article we propose a new Rao-Blackwellized
Rao-Blackwellized Particle Filter for Multiple Target Tracking Simo Särkkä, Aki Vehtari, Jouko Lampinen Helsinki University of Technology, Finland Abstract In this article we propose a new Rao-Blackwellized
Lecture 6: Bayesian Inference in SDE Models
 Lecture 6: Bayesian Inference in SDE Models Bayesian Filtering and Smoothing Point of View Simo Särkkä Aalto University Simo Särkkä (Aalto) Lecture 6: Bayesian Inference in SDEs 1 / 45 Contents 1 SDEs
Lecture 6: Bayesian Inference in SDE Models Bayesian Filtering and Smoothing Point of View Simo Särkkä Aalto University Simo Särkkä (Aalto) Lecture 6: Bayesian Inference in SDEs 1 / 45 Contents 1 SDEs
Local Positioning with Parallelepiped Moving Grid
 Local Positioning with Parallelepiped Moving Grid, WPNC06 16.3.2006, niilo.sirola@tut.fi p. 1/?? TA M P E R E U N I V E R S I T Y O F T E C H N O L O G Y M a t h e m a t i c s Local Positioning with Parallelepiped
Local Positioning with Parallelepiped Moving Grid, WPNC06 16.3.2006, niilo.sirola@tut.fi p. 1/?? TA M P E R E U N I V E R S I T Y O F T E C H N O L O G Y M a t h e m a t i c s Local Positioning with Parallelepiped
CS 343: Artificial Intelligence
 CS 343: Artificial Intelligence Particle Filters and Applications of HMMs Prof. Scott Niekum The University of Texas at Austin [These slides based on those of Dan Klein and Pieter Abbeel for CS188 Intro
CS 343: Artificial Intelligence Particle Filters and Applications of HMMs Prof. Scott Niekum The University of Texas at Austin [These slides based on those of Dan Klein and Pieter Abbeel for CS188 Intro
ISOMAP TRACKING WITH PARTICLE FILTER
 Clemson University TigerPrints All Theses Theses 5-2007 ISOMAP TRACKING WITH PARTICLE FILTER Nikhil Rane Clemson University, nrane@clemson.edu Follow this and additional works at: https://tigerprints.clemson.edu/all_theses
Clemson University TigerPrints All Theses Theses 5-2007 ISOMAP TRACKING WITH PARTICLE FILTER Nikhil Rane Clemson University, nrane@clemson.edu Follow this and additional works at: https://tigerprints.clemson.edu/all_theses
CS 343: Artificial Intelligence
 CS 343: Artificial Intelligence Particle Filters and Applications of HMMs Prof. Scott Niekum The University of Texas at Austin [These slides based on those of Dan Klein and Pieter Abbeel for CS188 Intro
CS 343: Artificial Intelligence Particle Filters and Applications of HMMs Prof. Scott Niekum The University of Texas at Austin [These slides based on those of Dan Klein and Pieter Abbeel for CS188 Intro
TSRT14: Sensor Fusion Lecture 8
 TSRT14: Sensor Fusion Lecture 8 Particle filter theory Marginalized particle filter Gustaf Hendeby gustaf.hendeby@liu.se TSRT14 Lecture 8 Gustaf Hendeby Spring 2018 1 / 25 Le 8: particle filter theory,
TSRT14: Sensor Fusion Lecture 8 Particle filter theory Marginalized particle filter Gustaf Hendeby gustaf.hendeby@liu.se TSRT14 Lecture 8 Gustaf Hendeby Spring 2018 1 / 25 Le 8: particle filter theory,
STA 4273H: Statistical Machine Learning
 STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Statistics! rsalakhu@utstat.toronto.edu! http://www.utstat.utoronto.ca/~rsalakhu/ Sidney Smith Hall, Room 6002 Lecture 11 Project
STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Statistics! rsalakhu@utstat.toronto.edu! http://www.utstat.utoronto.ca/~rsalakhu/ Sidney Smith Hall, Room 6002 Lecture 11 Project
From Bayes to Extended Kalman Filter
 From Bayes to Extended Kalman Filter Michal Reinštein Czech Technical University in Prague Faculty of Electrical Engineering, Department of Cybernetics Center for Machine Perception http://cmp.felk.cvut.cz/
From Bayes to Extended Kalman Filter Michal Reinštein Czech Technical University in Prague Faculty of Electrical Engineering, Department of Cybernetics Center for Machine Perception http://cmp.felk.cvut.cz/
Partially Observable Markov Decision Processes (POMDPs)
") Partially Observable Markov Decision Processes (POMDPs) Sachin Patil Guest Lecture: CS287 Advanced Robotics Slides adapted from Pieter Abbeel, Alex Lee Outline Introduction to POMDPs Locally Optimal Solutions
Partially Observable Markov Decision Processes (POMDPs) Sachin Patil Guest Lecture: CS287 Advanced Robotics Slides adapted from Pieter Abbeel, Alex Lee Outline Introduction to POMDPs Locally Optimal Solutions
State Estimation using Moving Horizon Estimation and Particle Filtering
 State Estimation using Moving Horizon Estimation and Particle Filtering James B. Rawlings Department of Chemical and Biological Engineering UW Math Probability Seminar Spring 2009 Rawlings MHE & PF 1 /
State Estimation using Moving Horizon Estimation and Particle Filtering James B. Rawlings Department of Chemical and Biological Engineering UW Math Probability Seminar Spring 2009 Rawlings MHE & PF 1 /
Parametric Models. Dr. Shuang LIANG. School of Software Engineering TongJi University Fall, 2012
 Parametric Models Dr. Shuang LIANG School of Software Engineering TongJi University Fall, 2012 Today s Topics Maximum Likelihood Estimation Bayesian Density Estimation Today s Topics Maximum Likelihood
Parametric Models Dr. Shuang LIANG School of Software Engineering TongJi University Fall, 2012 Today s Topics Maximum Likelihood Estimation Bayesian Density Estimation Today s Topics Maximum Likelihood