2D Image Processing. Bayes filter implementation: Kalman filter
|
|
|
- Avis Tucker
- 5 years ago
- Views:
Transcription
1 2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Kaiserlautern University DFKI Deutsches Forschungszentrum für Künstliche Intelligenz SA-1 Some slides based on G. Panin and K. Smith
2 Outline Recap: Bayes filter Some facts about Gaussians Kalman filter algorithm Some slides are based on G. Panin, S. Thrun, and K. Smith 2

3 Summary: Bayes filter framework 3
4 Summary: Bayes filters Probabilistic tool for recursively estimating the state of a dynamical system from noisy measurements and control inputs. Based on probabilistic concepts such as the Bayes theorem, Theorem of Total Probability (marginalization), and conditional independence. Make a Markov assumption according to which the state is a complete summary of the past. In realworld problems, this assumption is usually an approximation! 4
5 Markov assumption Underlying Assumptions Static world Independent noise Perfect model, no approximation errors 5
6 Markov assumption revisited Reality: sources of error and uncertainty Environment dynamics Approximate computation Random effects Sensor limitations Inaccurate models 6
7 Bayes update rule posterior likelihood motion model posterior at t-1 Provides a general concept Can in the presented form only be implemented for simple estimation problems, requires either or closed form solutions for multiplication and integral restriction to finite state spaces What is missing to be able to use this: Concrete representations for probability density functions Implementable and tractable filter approximations Applicability to continuous estimation problems 7

8 Representations of PDFs Example: Model the probability distribution of faces appearing in frame t 8

9 Representations of PDFs Example: Model the probability distribution of faces appearing in frame t 9

10 Representations of PDFs Example: Model the probability distribution of faces appearing in frame t Peak 1 Peak 3 Peak 2 10
11 Representations of PDFs One hypothesis, no uncertainty MAP=Maximum a posteriori: we look only for the maximum 11
12 Representations of PDFs One hypothesis + uncertainty 12
13 Representations of PDFs 13
14 Representations of PDFs (non-parametric) Dirac Any number and shape of modes 14


15 Representations of PDFs (non-parametric) Any number and shape of modes 15
16 Filter methods (rules-of-thumb) Different characteristics in terms of: Computational efficiency Accuracy of the approximation Ease of implementation Linear Gaussian models Bayes Filter Kalman Filter n 1 Kalman Filter banks Particle Filter Nonlinear models, Gaussian noises (Non)linear models, Gaussian noises, multimodal Highly nonlinear models, non-gaussian noises, multi-modal Unscented Kalman Filter Extended Kalman Filter 16

17 Kalman filter Published in 1960 Kalman, R. E A New Approach to Linear Filtering and Prediction Problems, Transaction of the ASME Journal of Basic Engineering, pp (March 1960). Used for many problems Guidance Navigation Autopilots Radar Satellite Weather forecasting 17
18 Univariate Gaussian Exponentiation of a quadratic function 18
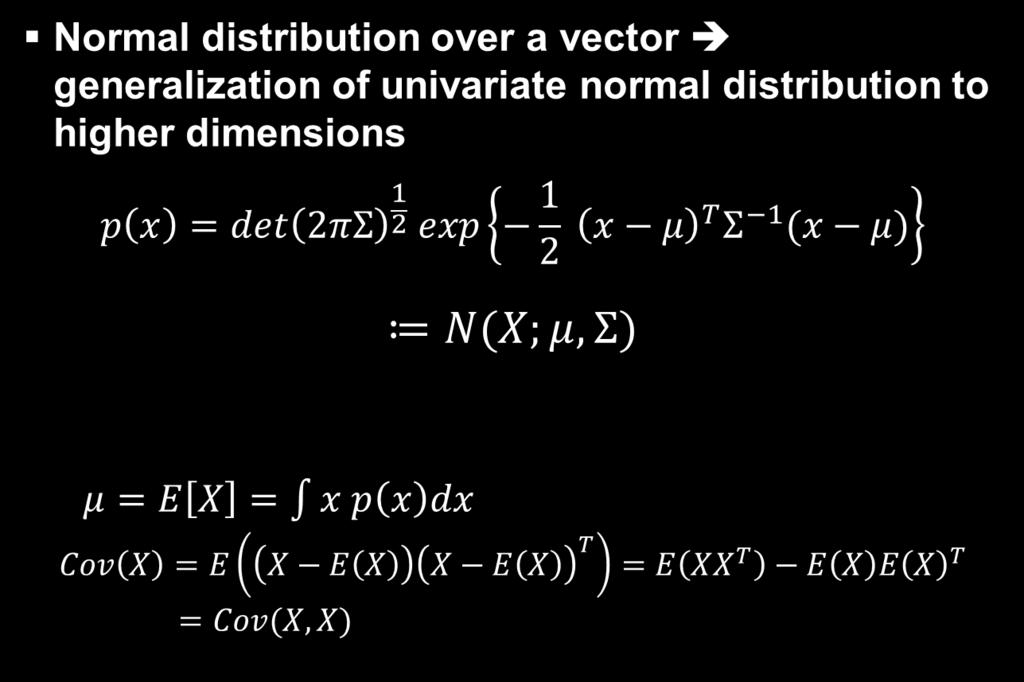
19 Multivariate Gaussian 19

20 Matlab example: Multivariate Gaussian 20
21 Matlab example: Samples drawn from a multivariate Gaussian 21


22 Properties of Gaussians 22

23 Properties of Gaussians Standardization 23
24 Matlab example: Two Gaussians with different variance (and mean) 24

25 Handling Gaussians 25
26 Matlab example: General Gaussian vs. transformed normal distribution 26


27 Drawing confidence regions of Gaussians (ex. 2D) Shape: draw a scaled and shifted circle 27

28 Matlab example: Confidence region 28
29 Tracking with Kalman filters: Gaussians! posterior prior Measurement All PDFs are assumed Gaussian closed-form solutions for integral and product of Gaussians tractable Bayes filter implementation for continuous spaces optimal (minimum variance) estimator for linear Gaussian systems 29
30 Product of Gaussians (fusion formula) Is again a Gaussian (though no longer normalized) Univariate case: Recursive formulation Multivariate case: 30


31 Fusion formula derived Maximum of quadratic function à set 1 st derivative to 0 à Mean of resulting distribution Curvature of quadratic function à 2 nd derivative à Inverse of covariance 31
32 Kalman filter models (state-space model) 32

33 Components of a Kalman Filter 33


34 Kalman filter update: prediction/time update Initial belief Prediction prior Diffusion Uncertainty increases 1D-case Gaussian Process noise covariance 34
35 Kalman filter update: correction/measurement update Initial belief Prediction prior posterior Measurement Gaussian Measurement noise covariance 1D-case Uncertainty decreases Fusion formula including linear functions! 35


36 Measurement update derivation... Whole derivation given, e.g., in Probabilistic Robotics by Thrun 36


37 Time update derivation... Whole derivation given, e.g., in Probabilistic Robotics by Thrun 37
38 Kalman filter algorithm (same structure as Bayes filter) 1. Kalman_filter(µ t-1, Σ t-1, u t, z t ): 2. Prediction/time update: Correction/measurement update: return µ t, Σ t 38
39 Correction/Measurement update Innovation Covariance decrease Innovation covariance Kalman gain: how much the innovation is taken into account minimizes the posterior state covariance 39
40 Kalman filter illustration (2D) Notation differs throughout literature In the following illustration by Kevin Smith: Motion model without control input (often not given in visual tracking) State covariance, measurement and process noise covariances are denoted by different symbols Often used notation: hat indicates estimate (rather than true state) P often used to denote state covariance Estimate at time t given t-1 (before including the measurement) 40

41 Kalman filter example State vector predict Measurement measure correct 41

42 Kalman filter: initial conditions Initial state predict measure correct 42
 Prediction from the motion model (here without control) Update the")
43 Kalman filter: predict mean (const. velocity model) Prediction from the motion model (here without control) Update the mean State transition matrix predict measure correct 43
44 Kalman filter: predict covariance Prediction from the motion model (here without control) Update covariance predict measure correct 44
45 Kalman filter: predict covariance If we would only predict predict measure correct 45

46 Kalman filter: measurement predict measure correct 46

47 Kalman filter: predicted measurement Predicted measurement predict measure correct 47
48 Kalman filter: innovation predicted measurement Innovation (residual) and innovation covariance: actual measurement predict predicted covariance measurement covariance correct measure 48
49 Kalman filter: Kalman gain Kalman gain specifies how much the correction considers the prediction or the measurement predict predicted covariance Innovation covariance correct measure 49
50 Kalman filter: measurement update Correct the prediction using the measurement state prediction innovation predict measure includes innovation covariance predicted covariance correct 50
51 Kalman filter Predict, measure, correct cycle iteratively estimates the state at each time step predict measure correct 51
52 Summary: Kalman filter Pros Efficient Gaussian densities are easy to work with Optimal solution for linear Gaussian systems (minimal variance) Well established method Cons Restricted to Gaussian densities Uni-modal distribution: single hypothesis Only linear, continuous models Readings: Kalman filter introduction by Greg Welch (part about KFs): 52

53 General purpose (translational) motion models State Motion model Assumptions 53

54 General purpose (translational) motion models State Unconstrained Motion models with control input Assumptions Smaller state, more efficient Control input enters estimate immediately, not filtered 54
 State Motion model Assumptions The model does not")
 State Motion model Assumptions Random walk in")
55 General purpose (translational) motion models Ballistic trajectory (gravity modelled as noisy control input) State Motion model Assumptions The model does not have to be physically motivated Basically, we are free to model whatever we want Constrained Brownian motion (in 1D) State Motion model Assumptions Random walk in position 55
56 Thank you! 56
2D Image Processing. Bayes filter implementation: Kalman filter
 2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Dr. Gabriele Bleser Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche
2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Dr. Gabriele Bleser Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche
2D Image Processing (Extended) Kalman and particle filter
 Kalman and particle filter") 2D Image Processing (Extended) Kalman and particle filter Prof. Didier Stricker Dr. Gabriele Bleser Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz
2D Image Processing (Extended) Kalman and particle filter Prof. Didier Stricker Dr. Gabriele Bleser Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz
Autonomous Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 6.2: Kalman Filter Jürgen Sturm Technische Universität München Motivation Bayes filter is a useful tool for state
Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 6.2: Kalman Filter Jürgen Sturm Technische Universität München Motivation Bayes filter is a useful tool for state
CS491/691: Introduction to Aerial Robotics
 CS491/691: Introduction to Aerial Robotics Topic: State Estimation Dr. Kostas Alexis (CSE) World state (or system state) Belief state: Our belief/estimate of the world state World state: Real state of
CS491/691: Introduction to Aerial Robotics Topic: State Estimation Dr. Kostas Alexis (CSE) World state (or system state) Belief state: Our belief/estimate of the world state World state: Real state of
Kalman filtering and friends: Inference in time series models. Herke van Hoof slides mostly by Michael Rubinstein
 Kalman filtering and friends: Inference in time series models Herke van Hoof slides mostly by Michael Rubinstein Problem overview Goal Estimate most probable state at time k using measurement up to time
Kalman filtering and friends: Inference in time series models Herke van Hoof slides mostly by Michael Rubinstein Problem overview Goal Estimate most probable state at time k using measurement up to time
AUTOMOTIVE ENVIRONMENT SENSORS
 AUTOMOTIVE ENVIRONMENT SENSORS Lecture 5. Localization BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Related concepts Concepts related to vehicles moving
AUTOMOTIVE ENVIRONMENT SENSORS Lecture 5. Localization BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Related concepts Concepts related to vehicles moving
Bayes Filter Reminder. Kalman Filter Localization. Properties of Gaussians. Gaussians. Prediction. Correction. σ 2. Univariate. 1 2πσ e.
 Kalman Filter Localization Bayes Filter Reminder Prediction Correction Gaussians p(x) ~ N(µ,σ 2 ) : Properties of Gaussians Univariate p(x) = 1 1 2πσ e 2 (x µ) 2 σ 2 µ Univariate -σ σ Multivariate µ Multivariate
Kalman Filter Localization Bayes Filter Reminder Prediction Correction Gaussians p(x) ~ N(µ,σ 2 ) : Properties of Gaussians Univariate p(x) = 1 1 2πσ e 2 (x µ) 2 σ 2 µ Univariate -σ σ Multivariate µ Multivariate
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Probabilistic Fundamentals in Robotics Gaussian Filters Course Outline Basic mathematical framework Probabilistic models of mobile robots Mobile
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Probabilistic Fundamentals in Robotics Gaussian Filters Course Outline Basic mathematical framework Probabilistic models of mobile robots Mobile
Probabilistic Fundamentals in Robotics. DAUIN Politecnico di Torino July 2010
 Probabilistic Fundamentals in Robotics Gaussian Filters Basilio Bona DAUIN Politecnico di Torino July 2010 Course Outline Basic mathematical framework Probabilistic models of mobile robots Mobile robot
Probabilistic Fundamentals in Robotics Gaussian Filters Basilio Bona DAUIN Politecnico di Torino July 2010 Course Outline Basic mathematical framework Probabilistic models of mobile robots Mobile robot
CONDENSATION Conditional Density Propagation for Visual Tracking
 CONDENSATION Conditional Density Propagation for Visual Tracking Michael Isard and Andrew Blake Presented by Neil Alldrin Department of Computer Science & Engineering University of California, San Diego
CONDENSATION Conditional Density Propagation for Visual Tracking Michael Isard and Andrew Blake Presented by Neil Alldrin Department of Computer Science & Engineering University of California, San Diego
Sensor Fusion: Particle Filter
 Sensor Fusion: Particle Filter By: Gordana Stojceska stojcesk@in.tum.de Outline Motivation Applications Fundamentals Tracking People Advantages and disadvantages Summary June 05 JASS '05, St.Petersburg,
Sensor Fusion: Particle Filter By: Gordana Stojceska stojcesk@in.tum.de Outline Motivation Applications Fundamentals Tracking People Advantages and disadvantages Summary June 05 JASS '05, St.Petersburg,
Lecture 9. Time series prediction
 Lecture 9 Time series prediction Prediction is about function fitting To predict we need to model There are a bewildering number of models for data we look at some of the major approaches in this lecture
Lecture 9 Time series prediction Prediction is about function fitting To predict we need to model There are a bewildering number of models for data we look at some of the major approaches in this lecture
EKF and SLAM. McGill COMP 765 Sept 18 th, 2017
 EKF and SLAM McGill COMP 765 Sept 18 th, 2017 Outline News and information Instructions for paper presentations Continue on Kalman filter: EKF and extension to mapping Example of a real mapping system:
EKF and SLAM McGill COMP 765 Sept 18 th, 2017 Outline News and information Instructions for paper presentations Continue on Kalman filter: EKF and extension to mapping Example of a real mapping system:
L11. EKF SLAM: PART I. NA568 Mobile Robotics: Methods & Algorithms
 L11. EKF SLAM: PART I NA568 Mobile Robotics: Methods & Algorithms Today s Topic EKF Feature-Based SLAM State Representation Process / Observation Models Landmark Initialization Robot-Landmark Correlation
L11. EKF SLAM: PART I NA568 Mobile Robotics: Methods & Algorithms Today s Topic EKF Feature-Based SLAM State Representation Process / Observation Models Landmark Initialization Robot-Landmark Correlation
Mobile Robot Localization
 Mobile Robot Localization 1 The Problem of Robot Localization Given a map of the environment, how can a robot determine its pose (planar coordinates + orientation)? Two sources of uncertainty: - observations
Mobile Robot Localization 1 The Problem of Robot Localization Given a map of the environment, how can a robot determine its pose (planar coordinates + orientation)? Two sources of uncertainty: - observations
COS Lecture 16 Autonomous Robot Navigation
 COS 495 - Lecture 16 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
COS 495 - Lecture 16 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
L06. LINEAR KALMAN FILTERS. NA568 Mobile Robotics: Methods & Algorithms
 L06. LINEAR KALMAN FILTERS NA568 Mobile Robotics: Methods & Algorithms 2 PS2 is out! Landmark-based Localization: EKF, UKF, PF Today s Lecture Minimum Mean Square Error (MMSE) Linear Kalman Filter Gaussian
L06. LINEAR KALMAN FILTERS NA568 Mobile Robotics: Methods & Algorithms 2 PS2 is out! Landmark-based Localization: EKF, UKF, PF Today s Lecture Minimum Mean Square Error (MMSE) Linear Kalman Filter Gaussian
Robot Localization and Kalman Filters
 Robot Localization and Kalman Filters Rudy Negenborn rudy@negenborn.net August 26, 2003 Outline Robot Localization Probabilistic Localization Kalman Filters Kalman Localization Kalman Localization with
Robot Localization and Kalman Filters Rudy Negenborn rudy@negenborn.net August 26, 2003 Outline Robot Localization Probabilistic Localization Kalman Filters Kalman Localization Kalman Localization with
Linear Dynamical Systems
 Linear Dynamical Systems Sargur N. srihari@cedar.buffalo.edu Machine Learning Course: http://www.cedar.buffalo.edu/~srihari/cse574/index.html Two Models Described by Same Graph Latent variables Observations
Linear Dynamical Systems Sargur N. srihari@cedar.buffalo.edu Machine Learning Course: http://www.cedar.buffalo.edu/~srihari/cse574/index.html Two Models Described by Same Graph Latent variables Observations
Maximum Likelihood (ML), Expectation Maximization (EM) Pieter Abbeel UC Berkeley EECS
, Expectation Maximization (EM) Pieter Abbeel UC Berkeley EECS") Maximum Likelihood (ML), Expectation Maximization (EM) Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Outline Maximum likelihood (ML) Priors, and
Maximum Likelihood (ML), Expectation Maximization (EM) Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Outline Maximum likelihood (ML) Priors, and
Modeling and state estimation Examples State estimation Probabilities Bayes filter Particle filter. Modeling. CSC752 Autonomous Robotic Systems
 Modeling CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami February 21, 2017 Outline 1 Modeling and state estimation 2 Examples 3 State estimation 4 Probabilities
Modeling CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami February 21, 2017 Outline 1 Modeling and state estimation 2 Examples 3 State estimation 4 Probabilities
Mobile Robot Localization
 Mobile Robot Localization 1 The Problem of Robot Localization Given a map of the environment, how can a robot determine its pose (planar coordinates + orientation)? Two sources of uncertainty: - observations
Mobile Robot Localization 1 The Problem of Robot Localization Given a map of the environment, how can a robot determine its pose (planar coordinates + orientation)? Two sources of uncertainty: - observations
Time Series Prediction by Kalman Smoother with Cross-Validated Noise Density
 Time Series Prediction by Kalman Smoother with Cross-Validated Noise Density Simo Särkkä E-mail: simo.sarkka@hut.fi Aki Vehtari E-mail: aki.vehtari@hut.fi Jouko Lampinen E-mail: jouko.lampinen@hut.fi Abstract
Time Series Prediction by Kalman Smoother with Cross-Validated Noise Density Simo Särkkä E-mail: simo.sarkka@hut.fi Aki Vehtari E-mail: aki.vehtari@hut.fi Jouko Lampinen E-mail: jouko.lampinen@hut.fi Abstract
Dynamic Multipath Estimation by Sequential Monte Carlo Methods
 Dynamic Multipath Estimation by Sequential Monte Carlo Methods M. Lentmaier, B. Krach, P. Robertson, and T. Thiasiriphet German Aerospace Center (DLR) Slide 1 Outline Multipath problem and signal model
Dynamic Multipath Estimation by Sequential Monte Carlo Methods M. Lentmaier, B. Krach, P. Robertson, and T. Thiasiriphet German Aerospace Center (DLR) Slide 1 Outline Multipath problem and signal model
Hidden Markov Models,99,100! Markov, here I come!
 Hidden Markov Models,99,100! Markov, here I come! 16.410/413 Principles of Autonomy and Decision-Making Pedro Santana (psantana@mit.edu) October 7 th, 2015. Based on material by Brian Williams and Emilio
Hidden Markov Models,99,100! Markov, here I come! 16.410/413 Principles of Autonomy and Decision-Making Pedro Santana (psantana@mit.edu) October 7 th, 2015. Based on material by Brian Williams and Emilio
CS 532: 3D Computer Vision 6 th Set of Notes
 1 CS 532: 3D Computer Vision 6 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Lecture Outline Intro to Covariance
1 CS 532: 3D Computer Vision 6 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Lecture Outline Intro to Covariance
Particle Filters; Simultaneous Localization and Mapping (Intelligent Autonomous Robotics) Subramanian Ramamoorthy School of Informatics
 Subramanian Ramamoorthy School of Informatics") Particle Filters; Simultaneous Localization and Mapping (Intelligent Autonomous Robotics) Subramanian Ramamoorthy School of Informatics Recap: State Estimation using Kalman Filter Project state and error
Particle Filters; Simultaneous Localization and Mapping (Intelligent Autonomous Robotics) Subramanian Ramamoorthy School of Informatics Recap: State Estimation using Kalman Filter Project state and error
Markov localization uses an explicit, discrete representation for the probability of all position in the state space.
 Markov Kalman Filter Localization Markov localization localization starting from any unknown position recovers from ambiguous situation. However, to update the probability of all positions within the whole
Markov Kalman Filter Localization Markov localization localization starting from any unknown position recovers from ambiguous situation. However, to update the probability of all positions within the whole
Miscellaneous. Regarding reading materials. Again, ask questions (if you have) and ask them earlier
 and ask them earlier") Miscellaneous Regarding reading materials Reading materials will be provided as needed If no assigned reading, it means I think the material from class is sufficient Should be enough for you to do your
Miscellaneous Regarding reading materials Reading materials will be provided as needed If no assigned reading, it means I think the material from class is sufficient Should be enough for you to do your
STA 4273H: Statistical Machine Learning
 STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Statistics! rsalakhu@utstat.toronto.edu! http://www.utstat.utoronto.ca/~rsalakhu/ Sidney Smith Hall, Room 6002 Lecture 11 Project
STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Statistics! rsalakhu@utstat.toronto.edu! http://www.utstat.utoronto.ca/~rsalakhu/ Sidney Smith Hall, Room 6002 Lecture 11 Project
Bayesian Methods in Positioning Applications
 Bayesian Methods in Positioning Applications Vedran Dizdarević v.dizdarevic@tugraz.at Graz University of Technology, Austria 24. May 2006 Bayesian Methods in Positioning Applications p.1/21 Outline Problem
Bayesian Methods in Positioning Applications Vedran Dizdarević v.dizdarevic@tugraz.at Graz University of Technology, Austria 24. May 2006 Bayesian Methods in Positioning Applications p.1/21 Outline Problem
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: Particle Filter for Localization Dr. Kostas Alexis (CSE) These slides relied on the lectures from C. Stachniss, and the book Probabilistic Robotics from Thurn et al.
Autonomous Mobile Robot Design Topic: Particle Filter for Localization Dr. Kostas Alexis (CSE) These slides relied on the lectures from C. Stachniss, and the book Probabilistic Robotics from Thurn et al.
From Bayes to Extended Kalman Filter
 From Bayes to Extended Kalman Filter Michal Reinštein Czech Technical University in Prague Faculty of Electrical Engineering, Department of Cybernetics Center for Machine Perception http://cmp.felk.cvut.cz/
From Bayes to Extended Kalman Filter Michal Reinštein Czech Technical University in Prague Faculty of Electrical Engineering, Department of Cybernetics Center for Machine Perception http://cmp.felk.cvut.cz/
X t = a t + r t, (7.1)
") Chapter 7 State Space Models 71 Introduction State Space models, developed over the past 10 20 years, are alternative models for time series They include both the ARIMA models of Chapters 3 6 and the Classical
Chapter 7 State Space Models 71 Introduction State Space models, developed over the past 10 20 years, are alternative models for time series They include both the ARIMA models of Chapters 3 6 and the Classical
Kalman Filter Computer Vision (Kris Kitani) Carnegie Mellon University
 Carnegie Mellon University") Kalman Filter 16-385 Computer Vision (Kris Kitani) Carnegie Mellon University Examples up to now have been discrete (binary) random variables Kalman filtering can be seen as a special case of a temporal
Kalman Filter 16-385 Computer Vision (Kris Kitani) Carnegie Mellon University Examples up to now have been discrete (binary) random variables Kalman filtering can be seen as a special case of a temporal
Computer Vision Group Prof. Daniel Cremers. 11. Sampling Methods
 Prof. Daniel Cremers 11. Sampling Methods Sampling Methods Sampling Methods are widely used in Computer Science as an approximation of a deterministic algorithm to represent uncertainty without a parametric
Prof. Daniel Cremers 11. Sampling Methods Sampling Methods Sampling Methods are widely used in Computer Science as an approximation of a deterministic algorithm to represent uncertainty without a parametric
Introduction to Mobile Robotics Probabilistic Robotics
 Introduction to Mobile Robotics Probabilistic Robotics Wolfram Burgard 1 Probabilistic Robotics Key idea: Explicit representation of uncertainty (using the calculus of probability theory) Perception Action
Introduction to Mobile Robotics Probabilistic Robotics Wolfram Burgard 1 Probabilistic Robotics Key idea: Explicit representation of uncertainty (using the calculus of probability theory) Perception Action
Why do we care? Measurements. Handling uncertainty over time: predicting, estimating, recognizing, learning. Dealing with time
 Handling uncertainty over time: predicting, estimating, recognizing, learning Chris Atkeson 2004 Why do we care? Speech recognition makes use of dependence of words and phonemes across time. Knowing where
Handling uncertainty over time: predicting, estimating, recognizing, learning Chris Atkeson 2004 Why do we care? Speech recognition makes use of dependence of words and phonemes across time. Knowing where
Parameter Estimation. Industrial AI Lab.
 Parameter Estimation Industrial AI Lab. Generative Model X Y w y = ω T x + ε ε~n(0, σ 2 ) σ 2 2 Maximum Likelihood Estimation (MLE) Estimate parameters θ ω, σ 2 given a generative model Given observed
Parameter Estimation Industrial AI Lab. Generative Model X Y w y = ω T x + ε ε~n(0, σ 2 ) σ 2 2 Maximum Likelihood Estimation (MLE) Estimate parameters θ ω, σ 2 given a generative model Given observed
CIS 390 Fall 2016 Robotics: Planning and Perception Final Review Questions
 CIS 390 Fall 2016 Robotics: Planning and Perception Final Review Questions December 14, 2016 Questions Throughout the following questions we will assume that x t is the state vector at time t, z t is the
CIS 390 Fall 2016 Robotics: Planning and Perception Final Review Questions December 14, 2016 Questions Throughout the following questions we will assume that x t is the state vector at time t, z t is the
Partially Observable Markov Decision Processes (POMDPs)
") Partially Observable Markov Decision Processes (POMDPs) Sachin Patil Guest Lecture: CS287 Advanced Robotics Slides adapted from Pieter Abbeel, Alex Lee Outline Introduction to POMDPs Locally Optimal Solutions
Partially Observable Markov Decision Processes (POMDPs) Sachin Patil Guest Lecture: CS287 Advanced Robotics Slides adapted from Pieter Abbeel, Alex Lee Outline Introduction to POMDPs Locally Optimal Solutions
Robots Autónomos. Depto. CCIA. 2. Bayesian Estimation and sensor models. Domingo Gallardo
 Robots Autónomos 2. Bayesian Estimation and sensor models Domingo Gallardo Depto. CCIA http://www.rvg.ua.es/master/robots References Recursive State Estimation: Thrun, chapter 2 Sensor models and robot
Robots Autónomos 2. Bayesian Estimation and sensor models Domingo Gallardo Depto. CCIA http://www.rvg.ua.es/master/robots References Recursive State Estimation: Thrun, chapter 2 Sensor models and robot
Robotics 2 Target Tracking. Kai Arras, Cyrill Stachniss, Maren Bennewitz, Wolfram Burgard
 Robotics 2 Target Tracking Kai Arras, Cyrill Stachniss, Maren Bennewitz, Wolfram Burgard Slides by Kai Arras, Gian Diego Tipaldi, v.1.1, Jan 2012 Chapter Contents Target Tracking Overview Applications
Robotics 2 Target Tracking Kai Arras, Cyrill Stachniss, Maren Bennewitz, Wolfram Burgard Slides by Kai Arras, Gian Diego Tipaldi, v.1.1, Jan 2012 Chapter Contents Target Tracking Overview Applications
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: Extended Kalman Filter Dr. Kostas Alexis (CSE) These slides relied on the lectures from C. Stachniss, J. Sturm and the book Probabilistic Robotics from Thurn et al.
Autonomous Mobile Robot Design Topic: Extended Kalman Filter Dr. Kostas Alexis (CSE) These slides relied on the lectures from C. Stachniss, J. Sturm and the book Probabilistic Robotics from Thurn et al.
Content.
 Content Fundamentals of Bayesian Techniques (E. Sucar) Bayesian Filters (O. Aycard) Definition & interests Implementations Hidden Markov models Discrete Bayesian Filters or Markov localization Kalman filters
Content Fundamentals of Bayesian Techniques (E. Sucar) Bayesian Filters (O. Aycard) Definition & interests Implementations Hidden Markov models Discrete Bayesian Filters or Markov localization Kalman filters
Efficient Monitoring for Planetary Rovers
 International Symposium on Artificial Intelligence and Robotics in Space (isairas), May, 2003 Efficient Monitoring for Planetary Rovers Vandi Verma vandi@ri.cmu.edu Geoff Gordon ggordon@cs.cmu.edu Carnegie
International Symposium on Artificial Intelligence and Robotics in Space (isairas), May, 2003 Efficient Monitoring for Planetary Rovers Vandi Verma vandi@ri.cmu.edu Geoff Gordon ggordon@cs.cmu.edu Carnegie
Gaussians. Pieter Abbeel UC Berkeley EECS. Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics
 Gaussians Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Outline Univariate Gaussian Multivariate Gaussian Law of Total Probability Conditioning
Gaussians Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Outline Univariate Gaussian Multivariate Gaussian Law of Total Probability Conditioning
Sensor Tasking and Control
 Sensor Tasking and Control Sensing Networking Leonidas Guibas Stanford University Computation CS428 Sensor systems are about sensing, after all... System State Continuous and Discrete Variables The quantities
Sensor Tasking and Control Sensing Networking Leonidas Guibas Stanford University Computation CS428 Sensor systems are about sensing, after all... System State Continuous and Discrete Variables The quantities
The Particle Filter. PD Dr. Rudolph Triebel Computer Vision Group. Machine Learning for Computer Vision
 The Particle Filter Non-parametric implementation of Bayes filter Represents the belief (posterior) random state samples. by a set of This representation is approximate. Can represent distributions that
The Particle Filter Non-parametric implementation of Bayes filter Represents the belief (posterior) random state samples. by a set of This representation is approximate. Can represent distributions that
Robotics 2 Target Tracking. Giorgio Grisetti, Cyrill Stachniss, Kai Arras, Wolfram Burgard
 Robotics 2 Target Tracking Giorgio Grisetti, Cyrill Stachniss, Kai Arras, Wolfram Burgard Linear Dynamical System (LDS) Stochastic process governed by is the state vector is the input vector is the process
Robotics 2 Target Tracking Giorgio Grisetti, Cyrill Stachniss, Kai Arras, Wolfram Burgard Linear Dynamical System (LDS) Stochastic process governed by is the state vector is the input vector is the process
STA 4273H: Statistical Machine Learning
 STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Statistics! rsalakhu@utstat.toronto.edu! http://www.utstat.utoronto.ca/~rsalakhu/ Sidney Smith Hall, Room 6002 Lecture 3 Linear
STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Statistics! rsalakhu@utstat.toronto.edu! http://www.utstat.utoronto.ca/~rsalakhu/ Sidney Smith Hall, Room 6002 Lecture 3 Linear
PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 13: SEQUENTIAL DATA
 PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 13: SEQUENTIAL DATA Contents in latter part Linear Dynamical Systems What is different from HMM? Kalman filter Its strength and limitation Particle Filter
PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 13: SEQUENTIAL DATA Contents in latter part Linear Dynamical Systems What is different from HMM? Kalman filter Its strength and limitation Particle Filter
9 Multi-Model State Estimation
 Technion Israel Institute of Technology, Department of Electrical Engineering Estimation and Identification in Dynamical Systems (048825) Lecture Notes, Fall 2009, Prof. N. Shimkin 9 Multi-Model State
Technion Israel Institute of Technology, Department of Electrical Engineering Estimation and Identification in Dynamical Systems (048825) Lecture Notes, Fall 2009, Prof. N. Shimkin 9 Multi-Model State
Introduction to Machine Learning
 Introduction to Machine Learning Brown University CSCI 1950-F, Spring 2012 Prof. Erik Sudderth Lecture 25: Markov Chain Monte Carlo (MCMC) Course Review and Advanced Topics Many figures courtesy Kevin
Introduction to Machine Learning Brown University CSCI 1950-F, Spring 2012 Prof. Erik Sudderth Lecture 25: Markov Chain Monte Carlo (MCMC) Course Review and Advanced Topics Many figures courtesy Kevin
Computer Vision Group Prof. Daniel Cremers. 14. Sampling Methods
 Prof. Daniel Cremers 14. Sampling Methods Sampling Methods Sampling Methods are widely used in Computer Science as an approximation of a deterministic algorithm to represent uncertainty without a parametric
Prof. Daniel Cremers 14. Sampling Methods Sampling Methods Sampling Methods are widely used in Computer Science as an approximation of a deterministic algorithm to represent uncertainty without a parametric
Vlad Estivill-Castro. Robots for People --- A project for intelligent integrated systems
 1 Vlad Estivill-Castro Robots for People --- A project for intelligent integrated systems V. Estivill-Castro 2 Probabilistic Map-based Localization (Kalman Filter) Chapter 5 (textbook) Based on textbook
1 Vlad Estivill-Castro Robots for People --- A project for intelligent integrated systems V. Estivill-Castro 2 Probabilistic Map-based Localization (Kalman Filter) Chapter 5 (textbook) Based on textbook
Partially Observable Markov Decision Processes (POMDPs) Pieter Abbeel UC Berkeley EECS
 Pieter Abbeel UC Berkeley EECS") Partially Observable Markov Decision Processes (POMDPs) Pieter Abbeel UC Berkeley EECS Many slides adapted from Jur van den Berg Outline POMDPs Separation Principle / Certainty Equivalence Locally Optimal
Partially Observable Markov Decision Processes (POMDPs) Pieter Abbeel UC Berkeley EECS Many slides adapted from Jur van den Berg Outline POMDPs Separation Principle / Certainty Equivalence Locally Optimal
SLAM Techniques and Algorithms. Jack Collier. Canada. Recherche et développement pour la défense Canada. Defence Research and Development Canada
 SLAM Techniques and Algorithms Jack Collier Defence Research and Development Canada Recherche et développement pour la défense Canada Canada Goals What will we learn Gain an appreciation for what SLAM
SLAM Techniques and Algorithms Jack Collier Defence Research and Development Canada Recherche et développement pour la défense Canada Canada Goals What will we learn Gain an appreciation for what SLAM
Why do we care? Examples. Bayes Rule. What room am I in? Handling uncertainty over time: predicting, estimating, recognizing, learning
 Handling uncertainty over time: predicting, estimating, recognizing, learning Chris Atkeson 004 Why do we care? Speech recognition makes use of dependence of words and phonemes across time. Knowing where
Handling uncertainty over time: predicting, estimating, recognizing, learning Chris Atkeson 004 Why do we care? Speech recognition makes use of dependence of words and phonemes across time. Knowing where
Particle Filters. Outline
 Particle Filters M. Sami Fadali Professor of EE University of Nevada Outline Monte Carlo integration. Particle filter. Importance sampling. Degeneracy Resampling Example. 1 2 Monte Carlo Integration Numerical
Particle Filters M. Sami Fadali Professor of EE University of Nevada Outline Monte Carlo integration. Particle filter. Importance sampling. Degeneracy Resampling Example. 1 2 Monte Carlo Integration Numerical
Robotics. Mobile Robotics. Marc Toussaint U Stuttgart
 Robotics Mobile Robotics State estimation, Bayes filter, odometry, particle filter, Kalman filter, SLAM, joint Bayes filter, EKF SLAM, particle SLAM, graph-based SLAM Marc Toussaint U Stuttgart DARPA Grand
Robotics Mobile Robotics State estimation, Bayes filter, odometry, particle filter, Kalman filter, SLAM, joint Bayes filter, EKF SLAM, particle SLAM, graph-based SLAM Marc Toussaint U Stuttgart DARPA Grand
Fundamentals of Data Assimila1on
 014 GSI Community Tutorial NCAR Foothills Campus, Boulder, CO July 14-16, 014 Fundamentals of Data Assimila1on Milija Zupanski Cooperative Institute for Research in the Atmosphere Colorado State University
014 GSI Community Tutorial NCAR Foothills Campus, Boulder, CO July 14-16, 014 Fundamentals of Data Assimila1on Milija Zupanski Cooperative Institute for Research in the Atmosphere Colorado State University
Particle Filters. Pieter Abbeel UC Berkeley EECS. Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics
 Particle Filters Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Motivation For continuous spaces: often no analytical formulas for Bayes filter updates
Particle Filters Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Motivation For continuous spaces: often no analytical formulas for Bayes filter updates
Rao-Blackwellized Particle Filter for Multiple Target Tracking
 Rao-Blackwellized Particle Filter for Multiple Target Tracking Simo Särkkä, Aki Vehtari, Jouko Lampinen Helsinki University of Technology, Finland Abstract In this article we propose a new Rao-Blackwellized
Rao-Blackwellized Particle Filter for Multiple Target Tracking Simo Särkkä, Aki Vehtari, Jouko Lampinen Helsinki University of Technology, Finland Abstract In this article we propose a new Rao-Blackwellized
Simultaneous Localization and Mapping (SLAM) Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo") Simultaneous Localization and Mapping (SLAM) Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Introduction SLAM asks the following question: Is it possible for an autonomous vehicle
Simultaneous Localization and Mapping (SLAM) Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Introduction SLAM asks the following question: Is it possible for an autonomous vehicle
The Kalman Filter. Data Assimilation & Inverse Problems from Weather Forecasting to Neuroscience. Sarah Dance
 The Kalman Filter Data Assimilation & Inverse Problems from Weather Forecasting to Neuroscience Sarah Dance School of Mathematical and Physical Sciences, University of Reading s.l.dance@reading.ac.uk July
The Kalman Filter Data Assimilation & Inverse Problems from Weather Forecasting to Neuroscience Sarah Dance School of Mathematical and Physical Sciences, University of Reading s.l.dance@reading.ac.uk July
Inference and estimation in probabilistic time series models
 1 Inference and estimation in probabilistic time series models David Barber, A Taylan Cemgil and Silvia Chiappa 11 Time series The term time series refers to data that can be represented as a sequence
1 Inference and estimation in probabilistic time series models David Barber, A Taylan Cemgil and Silvia Chiappa 11 Time series The term time series refers to data that can be represented as a sequence
Dynamic models 1 Kalman filters, linearization,
 Koller & Friedman: Chapter 16 Jordan: Chapters 13, 15 Uri Lerner s Thesis: Chapters 3,9 Dynamic models 1 Kalman filters, linearization, Switching KFs, Assumed density filters Probabilistic Graphical Models
Koller & Friedman: Chapter 16 Jordan: Chapters 13, 15 Uri Lerner s Thesis: Chapters 3,9 Dynamic models 1 Kalman filters, linearization, Switching KFs, Assumed density filters Probabilistic Graphical Models
Ensemble Data Assimilation and Uncertainty Quantification
 Ensemble Data Assimilation and Uncertainty Quantification Jeff Anderson National Center for Atmospheric Research pg 1 What is Data Assimilation? Observations combined with a Model forecast + to produce
Ensemble Data Assimilation and Uncertainty Quantification Jeff Anderson National Center for Atmospheric Research pg 1 What is Data Assimilation? Observations combined with a Model forecast + to produce
Greg Welch and Gary Bishop. University of North Carolina at Chapel Hill Department of Computer Science.
 STC Lecture Series An Introduction to the Kalman Filter Greg Welch and Gary Bishop University of North Carolina at Chapel Hill Department of Computer Science http://www.cs.unc.edu/~welch/kalmanlinks.html
STC Lecture Series An Introduction to the Kalman Filter Greg Welch and Gary Bishop University of North Carolina at Chapel Hill Department of Computer Science http://www.cs.unc.edu/~welch/kalmanlinks.html
Robotics 2 Data Association. Giorgio Grisetti, Cyrill Stachniss, Kai Arras, Wolfram Burgard
 Robotics 2 Data Association Giorgio Grisetti, Cyrill Stachniss, Kai Arras, Wolfram Burgard Data Association Data association is the process of associating uncertain measurements to known tracks. Problem
Robotics 2 Data Association Giorgio Grisetti, Cyrill Stachniss, Kai Arras, Wolfram Burgard Data Association Data association is the process of associating uncertain measurements to known tracks. Problem
Probabilistic Graphical Models
 Probabilistic Graphical Models Brown University CSCI 2950-P, Spring 2013 Prof. Erik Sudderth Lecture 13: Learning in Gaussian Graphical Models, Non-Gaussian Inference, Monte Carlo Methods Some figures
Probabilistic Graphical Models Brown University CSCI 2950-P, Spring 2013 Prof. Erik Sudderth Lecture 13: Learning in Gaussian Graphical Models, Non-Gaussian Inference, Monte Carlo Methods Some figures
Dimension Reduction. David M. Blei. April 23, 2012
 Dimension Reduction David M. Blei April 23, 2012 1 Basic idea Goal: Compute a reduced representation of data from p -dimensional to q-dimensional, where q < p. x 1,...,x p z 1,...,z q (1) We want to do
Dimension Reduction David M. Blei April 23, 2012 1 Basic idea Goal: Compute a reduced representation of data from p -dimensional to q-dimensional, where q < p. x 1,...,x p z 1,...,z q (1) We want to do
CSEP 573: Artificial Intelligence
 CSEP 573: Artificial Intelligence Hidden Markov Models Luke Zettlemoyer Many slides over the course adapted from either Dan Klein, Stuart Russell, Andrew Moore, Ali Farhadi, or Dan Weld 1 Outline Probabilistic
CSEP 573: Artificial Intelligence Hidden Markov Models Luke Zettlemoyer Many slides over the course adapted from either Dan Klein, Stuart Russell, Andrew Moore, Ali Farhadi, or Dan Weld 1 Outline Probabilistic
ECE295, Data Assimila0on and Inverse Problems, Spring 2015
 ECE295, Data Assimila0on and Inverse Problems, Spring 2015 1 April, Intro; Linear discrete Inverse problems (Aster Ch 1 and 2) Slides 8 April, SVD (Aster ch 2 and 3) Slides 15 April, RegularizaFon (ch
ECE295, Data Assimila0on and Inverse Problems, Spring 2015 1 April, Intro; Linear discrete Inverse problems (Aster Ch 1 and 2) Slides 8 April, SVD (Aster ch 2 and 3) Slides 15 April, RegularizaFon (ch
Lecture Outline. Target Tracking: Lecture 3 Maneuvering Target Tracking Issues. Maneuver Illustration. Maneuver Illustration. Maneuver Detection
 REGLERTEKNIK Lecture Outline AUTOMATIC CONTROL Target Tracking: Lecture 3 Maneuvering Target Tracking Issues Maneuver Detection Emre Özkan emre@isy.liu.se Division of Automatic Control Department of Electrical
REGLERTEKNIK Lecture Outline AUTOMATIC CONTROL Target Tracking: Lecture 3 Maneuvering Target Tracking Issues Maneuver Detection Emre Özkan emre@isy.liu.se Division of Automatic Control Department of Electrical
CS325 Artificial Intelligence Ch. 15,20 Hidden Markov Models and Particle Filtering
 CS325 Artificial Intelligence Ch. 15,20 Hidden Markov Models and Particle Filtering Cengiz Günay, Emory Univ. Günay Ch. 15,20 Hidden Markov Models and Particle FilteringSpring 2013 1 / 21 Get Rich Fast!
CS325 Artificial Intelligence Ch. 15,20 Hidden Markov Models and Particle Filtering Cengiz Günay, Emory Univ. Günay Ch. 15,20 Hidden Markov Models and Particle FilteringSpring 2013 1 / 21 Get Rich Fast!
EKF, UKF. Pieter Abbeel UC Berkeley EECS. Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics
 EKF, UKF Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Kalman Filter Kalman Filter = special case of a Bayes filter with dynamics model and sensory
EKF, UKF Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Kalman Filter Kalman Filter = special case of a Bayes filter with dynamics model and sensory
Nonlinear Optimization for Optimal Control Part 2. Pieter Abbeel UC Berkeley EECS. From linear to nonlinear Model-predictive control (MPC) POMDPs
 POMDPs") Nonlinear Optimization for Optimal Control Part 2 Pieter Abbeel UC Berkeley EECS Outline From linear to nonlinear Model-predictive control (MPC) POMDPs Page 1! From Linear to Nonlinear We know how to solve
Nonlinear Optimization for Optimal Control Part 2 Pieter Abbeel UC Berkeley EECS Outline From linear to nonlinear Model-predictive control (MPC) POMDPs Page 1! From Linear to Nonlinear We know how to solve
Dynamic System Identification using HDMR-Bayesian Technique
 Dynamic System Identification using HDMR-Bayesian Technique *Shereena O A 1) and Dr. B N Rao 2) 1), 2) Department of Civil Engineering, IIT Madras, Chennai 600036, Tamil Nadu, India 1) ce14d020@smail.iitm.ac.in
Dynamic System Identification using HDMR-Bayesian Technique *Shereena O A 1) and Dr. B N Rao 2) 1), 2) Department of Civil Engineering, IIT Madras, Chennai 600036, Tamil Nadu, India 1) ce14d020@smail.iitm.ac.in
Using the Kalman Filter to Estimate the State of a Maneuvering Aircraft
 1 Using the Kalman Filter to Estimate the State of a Maneuvering Aircraft K. Meier and A. Desai Abstract Using sensors that only measure the bearing angle and range of an aircraft, a Kalman filter is implemented
1 Using the Kalman Filter to Estimate the State of a Maneuvering Aircraft K. Meier and A. Desai Abstract Using sensors that only measure the bearing angle and range of an aircraft, a Kalman filter is implemented
EKF, UKF. Pieter Abbeel UC Berkeley EECS. Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics
 EKF, UKF Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Kalman Filter Kalman Filter = special case of a Bayes filter with dynamics model and sensory
EKF, UKF Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Kalman Filter Kalman Filter = special case of a Bayes filter with dynamics model and sensory
A Comparison of the EKF, SPKF, and the Bayes Filter for Landmark-Based Localization
 A Comparison of the EKF, SPKF, and the Bayes Filter for Landmark-Based Localization and Timothy D. Barfoot CRV 2 Outline Background Objective Experimental Setup Results Discussion Conclusion 2 Outline
A Comparison of the EKF, SPKF, and the Bayes Filter for Landmark-Based Localization and Timothy D. Barfoot CRV 2 Outline Background Objective Experimental Setup Results Discussion Conclusion 2 Outline
Expectation Propagation in Dynamical Systems
 Expectation Propagation in Dynamical Systems Marc Peter Deisenroth Joint Work with Shakir Mohamed (UBC) August 10, 2012 Marc Deisenroth (TU Darmstadt) EP in Dynamical Systems 1 Motivation Figure : Complex
Expectation Propagation in Dynamical Systems Marc Peter Deisenroth Joint Work with Shakir Mohamed (UBC) August 10, 2012 Marc Deisenroth (TU Darmstadt) EP in Dynamical Systems 1 Motivation Figure : Complex
Lecture 2: From Linear Regression to Kalman Filter and Beyond
 Lecture 2: From Linear Regression to Kalman Filter and Beyond Department of Biomedical Engineering and Computational Science Aalto University January 26, 2012 Contents 1 Batch and Recursive Estimation
Lecture 2: From Linear Regression to Kalman Filter and Beyond Department of Biomedical Engineering and Computational Science Aalto University January 26, 2012 Contents 1 Batch and Recursive Estimation
Lessons in Estimation Theory for Signal Processing, Communications, and Control
 Lessons in Estimation Theory for Signal Processing, Communications, and Control Jerry M. Mendel Department of Electrical Engineering University of Southern California Los Angeles, California PRENTICE HALL
Lessons in Estimation Theory for Signal Processing, Communications, and Control Jerry M. Mendel Department of Electrical Engineering University of Southern California Los Angeles, California PRENTICE HALL
TSRT14: Sensor Fusion Lecture 8
 TSRT14: Sensor Fusion Lecture 8 Particle filter theory Marginalized particle filter Gustaf Hendeby gustaf.hendeby@liu.se TSRT14 Lecture 8 Gustaf Hendeby Spring 2018 1 / 25 Le 8: particle filter theory,
TSRT14: Sensor Fusion Lecture 8 Particle filter theory Marginalized particle filter Gustaf Hendeby gustaf.hendeby@liu.se TSRT14 Lecture 8 Gustaf Hendeby Spring 2018 1 / 25 Le 8: particle filter theory,
Localization. Howie Choset Adapted from slides by Humphrey Hu, Trevor Decker, and Brad Neuman
 Localization Howie Choset Adapted from slides by Humphrey Hu, Trevor Decker, and Brad Neuman Localization General robotic task Where am I? Techniques generalize to many estimation tasks System parameter
Localization Howie Choset Adapted from slides by Humphrey Hu, Trevor Decker, and Brad Neuman Localization General robotic task Where am I? Techniques generalize to many estimation tasks System parameter
Bayesian Regression Linear and Logistic Regression
 When we want more than point estimates Bayesian Regression Linear and Logistic Regression Nicole Beckage Ordinary Least Squares Regression and Lasso Regression return only point estimates But what if we
When we want more than point estimates Bayesian Regression Linear and Logistic Regression Nicole Beckage Ordinary Least Squares Regression and Lasso Regression return only point estimates But what if we
The Kalman Filter (part 1) Definition. Rudolf Emil Kalman. Why do we need a filter? Definition. HCI/ComS 575X: Computational Perception.
 Definition. Rudolf Emil Kalman. Why do we need a filter? Definition. HCI/ComS 575X: Computational Perception.") The Kalman Filter (part 1) HCI/ComS 575X: Computational Perception Instructor: Alexander Stoytchev http://www.cs.iastate.edu/~alex/classes/2007_spring_575x/ March 5, 2007 HCI/ComS 575X: Computational Perception
The Kalman Filter (part 1) HCI/ComS 575X: Computational Perception Instructor: Alexander Stoytchev http://www.cs.iastate.edu/~alex/classes/2007_spring_575x/ March 5, 2007 HCI/ComS 575X: Computational Perception
Nonparametric Bayesian Methods (Gaussian Processes)
") [70240413 Statistical Machine Learning, Spring, 2015] Nonparametric Bayesian Methods (Gaussian Processes) Jun Zhu dcszj@mail.tsinghua.edu.cn http://bigml.cs.tsinghua.edu.cn/~jun State Key Lab of Intelligent
[70240413 Statistical Machine Learning, Spring, 2015] Nonparametric Bayesian Methods (Gaussian Processes) Jun Zhu dcszj@mail.tsinghua.edu.cn http://bigml.cs.tsinghua.edu.cn/~jun State Key Lab of Intelligent
A Study of Covariances within Basic and Extended Kalman Filters
 A Study of Covariances within Basic and Extended Kalman Filters David Wheeler Kyle Ingersoll December 2, 2013 Abstract This paper explores the role of covariance in the context of Kalman filters. The underlying
A Study of Covariances within Basic and Extended Kalman Filters David Wheeler Kyle Ingersoll December 2, 2013 Abstract This paper explores the role of covariance in the context of Kalman filters. The underlying
The Unscented Particle Filter
 The Unscented Particle Filter Rudolph van der Merwe (OGI) Nando de Freitas (UC Bereley) Arnaud Doucet (Cambridge University) Eric Wan (OGI) Outline Optimal Estimation & Filtering Optimal Recursive Bayesian
The Unscented Particle Filter Rudolph van der Merwe (OGI) Nando de Freitas (UC Bereley) Arnaud Doucet (Cambridge University) Eric Wan (OGI) Outline Optimal Estimation & Filtering Optimal Recursive Bayesian
(Extended) Kalman Filter
 Kalman Filter") (Extended) Kalman Filter Brian Hunt 7 June 2013 Goals of Data Assimilation (DA) Estimate the state of a system based on both current and all past observations of the system, using a model for the system
(Extended) Kalman Filter Brian Hunt 7 June 2013 Goals of Data Assimilation (DA) Estimate the state of a system based on both current and all past observations of the system, using a model for the system
Bayesian tracking of multiple point targets using expectation maximization
 450 400 350 300 p y (m) 250 200 150 100 50 0 Measurement data True tracks Track estimates 50 100 150 200 250 300 350 400 450 500 p x (m) Bayesian tracking of multiple point targets using expectation maximization
450 400 350 300 p y (m) 250 200 150 100 50 0 Measurement data True tracks Track estimates 50 100 150 200 250 300 350 400 450 500 p x (m) Bayesian tracking of multiple point targets using expectation maximization
Multivariate Bayesian Linear Regression MLAI Lecture 11
 Multivariate Bayesian Linear Regression MLAI Lecture 11 Neil D. Lawrence Department of Computer Science Sheffield University 21st October 2012 Outline Univariate Bayesian Linear Regression Multivariate
Multivariate Bayesian Linear Regression MLAI Lecture 11 Neil D. Lawrence Department of Computer Science Sheffield University 21st October 2012 Outline Univariate Bayesian Linear Regression Multivariate
Introduction to Mobile Robotics Bayes Filter Kalman Filter
 Introduction to Mobile Robotics Bayes Filter Kalman Filter Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Giorgio Grisetti, Kai Arras 1 Bayes Filter Reminder 1. Algorithm Bayes_filter( Bel(x),d ):
Introduction to Mobile Robotics Bayes Filter Kalman Filter Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Giorgio Grisetti, Kai Arras 1 Bayes Filter Reminder 1. Algorithm Bayes_filter( Bel(x),d ):
Nonlinear and/or Non-normal Filtering. Jesús Fernández-Villaverde University of Pennsylvania
 Nonlinear and/or Non-normal Filtering Jesús Fernández-Villaverde University of Pennsylvania 1 Motivation Nonlinear and/or non-gaussian filtering, smoothing, and forecasting (NLGF) problems are pervasive
Nonlinear and/or Non-normal Filtering Jesús Fernández-Villaverde University of Pennsylvania 1 Motivation Nonlinear and/or non-gaussian filtering, smoothing, and forecasting (NLGF) problems are pervasive
PROBABILISTIC REASONING OVER TIME
 PROBABILISTIC REASONING OVER TIME In which we try to interpret the present, understand the past, and perhaps predict the future, even when very little is crystal clear. Outline Time and uncertainty Inference:
PROBABILISTIC REASONING OVER TIME In which we try to interpret the present, understand the past, and perhaps predict the future, even when very little is crystal clear. Outline Time and uncertainty Inference:
Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization
 Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras 1 Motivation Recall: Discrete filter Discretize the
Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras 1 Motivation Recall: Discrete filter Discretize the