CS491/691: Introduction to Aerial Robotics
|
|
|
- Jonathan Summers
- 6 years ago
- Views:
Transcription

1 CS491/691: Introduction to Aerial Robotics Topic: Midterm Preparation Dr. Kostas Alexis (CSE)
")
 State")
2 Areas of Focus Coordinate system transformations (CST) MAV Dynamics (MAVD) Navigation Sensors (NS) State Estimation (SE)
3 CS491/691: Introduction to Aerial Robotics Topic: Coordinate Systems Transformations Dr. Kostas Alexis (CSE)


4 CST: Vector Rotation Rotation around the k-axis


5 CST: Vehicle-1 Frame ψ represents the yaw angle

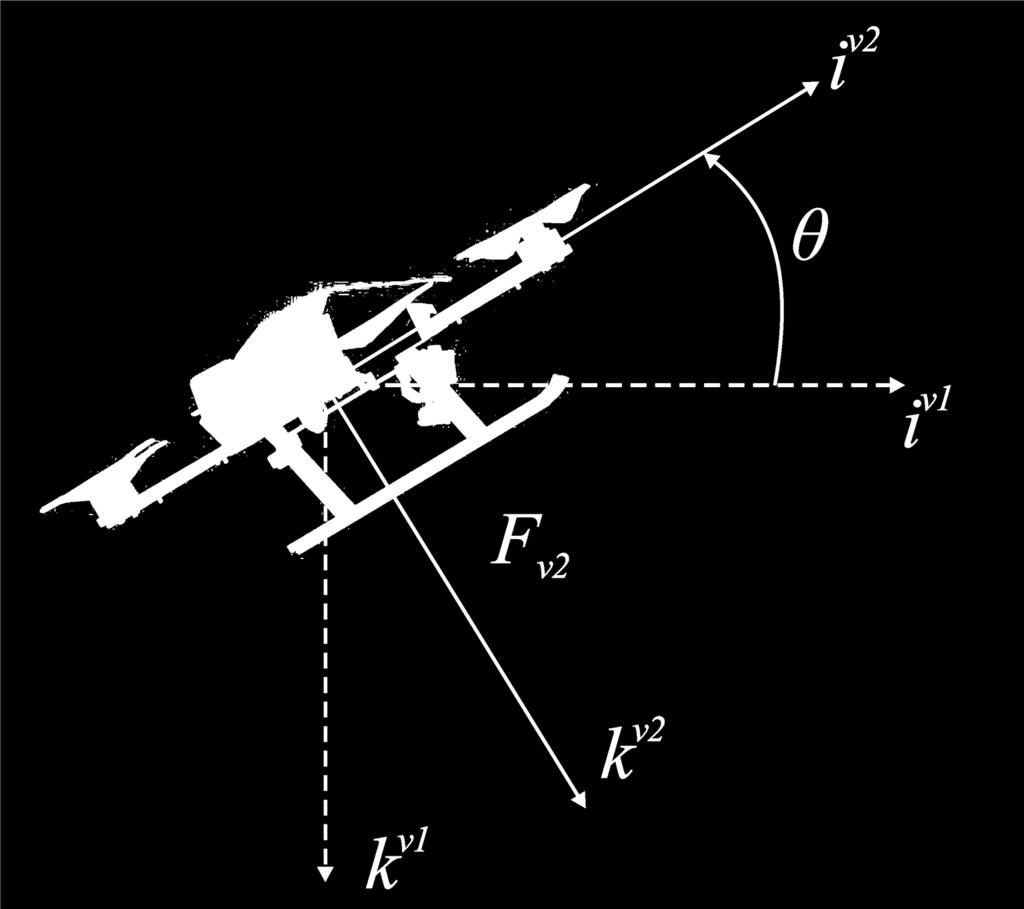
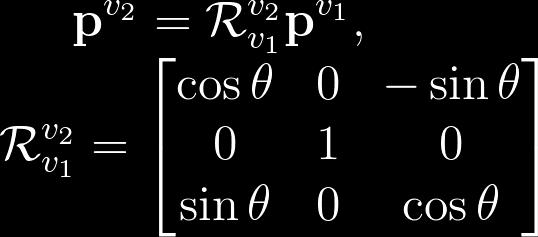
6 CST: Vehicle-2 Frame θ represents the pitch angle


7 CST: Body Frame φ represents the roll angle

8 CST: Inertial Frame to Body Frame Let: Then:




9 CST: Rotation of Reference Frame Rotation around the i-axis Rotation around the j-axis Rotation around the k-axis Orthonormal matrix properties
![CST: Application to Robot Kinematics [p,q,r] :](/docs-images/75/72824443/images/10-0.jpg "body angular rates [u,v,w] : body linear")
10 CST: Application to Robot Kinematics [p,q,r] : body angular rates [u,v,w] : body linear velocities

![[u,v,w] represent the body](/docs-images/75/72824443/images/11-2.jpg "linear velocities Which")
11 CST: Relate Translational Velocity-Position Let [u,v,w] represent the body linear velocities Which gives:
![CST: Body Rates Euler Rates Let [p,q,r] denote](/docs-images/75/72824443/images/12-0.jpg "the body angular rates Inverting this")
12 CST: Body Rates Euler Rates Let [p,q,r] denote the body angular rates Inverting this expression:
13 CST: Indicative questions What is the rotation matrix for a roll motion of π/6 and a pitch motion of π/4? Correlate the body rates and the Euler angles derivatives for a roll motion of π/6 and a pitch motion of π/4 Where do the Euler angles present singularity? Your vehicle is performing a yaw rotation of π/2. Draw and provide the rotation matrix Explain the chain of operations required to conduct a roll, pitch and yaw rotation
14 CS491/691: Introduction to Aerial Robotics Topic: MAV Dynamics Dr. Kostas Alexis (CSE)

15 MAVD: The MAV Propeller Simplified model forces and moments: Thrust Force: the resultant of the vertical forces acting on all the blade elements. Drag Moment: This moment about the rotor shaft is caused by the aerodynamic forces acting on the blade elements. The horizontal forces acting on the rotor are multiplied by the moment arm and integrated over the rotor. Drag moment determines the power required to spin the rotor.
16 MAVD: MAV Dynamics What is the relation between the propeller aerodynamic forces and moments, the gravity force and the motion of the aerial robot?

17 MAVD: MAV Dynamics Assumption 1: the Micro Aerial Vehicle is flying as a rigid body with negligible aerodynamic effects on it for the employed airspeeds. The propeller is considered as a simple propeller disc that generates thrust and a moment around its shaft. Recall: And let us write:


18 MAVD: MAV Dynamics To append the forces and moments we need to combine their formulation with Next step: append the MAV forces and moments

19 MAVD: MAV Dynamics MAV forces in the body frame: Moments in the body frame:
20 MAVD: Control Allocation MAV forces in the body frame: Moments in the body frame:

21 MAVD: Control Allocation MAV forces in the body frame: Moments in the body frame:
22 MAVD: Indicative questions What is the control allocation matrix for an octarotor with arm length equal to 0.3m? Describe how the control methodology of this control allocation actuates the roll, pitch and yaw rotations as well as how the aerial robot moves in the x,y,z axis. What is the thrust force necessary to compensate for the weight given any possibly orientation of the MAV that can be continuously defined using Euler angles? What parameters can you change to improve the capability of a motor-propeller system to provide more thrust? Correlate your answer with the terms of the thrust force equation.
23 CS491/691: Introduction to Aerial Robotics Topic: Navigation Sensors Dr. Kostas Alexis (CSE)

24 NS: Accelerometer Accelerometers are devices that measure proper acceleration ("g-force"). Proper acceleration is not the same as coordinate acceleration (rate of change of velocity). For example, an accelerometer at rest on the surface of the Earth will measure an acceleration g= 9.81 m/s^2 straight upwards. Accelerometers are electromechanical devices that are able of measuring static and/or dynamic forces of acceleration. Static forces include gravity, while dynamic forces can include vibrations and movement. Accelerometers can measure acceleration on 1, 2 or 3 axes.

25 NS: Accelerometer Simplified Accelerometer Model: Where a is the acceleration second derivative of d

26 NS: Accelerometer For the cases within which, the vehicle acceleration is constant, then the steady state output of the accelerometer is also constant, therefore indicating the existence and value of the acceleration. The undamped natural frequency and the damping ratio of the accelerometer are: Where a is the acceleration second derivative of d
27 NS: Accelerometer Bias effects on accelerometers: accelerometer measurements are degradated by scale errors and bias effects. A typical error model takes the form: Where a 3D stands for the 3-axes acceleration, M acc for combined scale factor and misalignment compensation, a 3Dm for the measurement, a bias for bias signal and a n for zero mean noise.
28 NS: Gyroscope A gyroscope is - conceptually - a spinning wheel in which the axis of rotation is free to assume any possible orientation. When rotating, the orientation of this axis remains unaffected by tilting or rotation of the mounting, according to the conservation of angular momentum. Due to this principle, a gyroscope can lead to the measurement of orientation and its rate of change. The word comes from the Greek "γύρος" and σκοπεύω which mean "circle" and "to look" correspondingly. Nowadays, we are mostly using gyroscopes that are based on different operating principles. In aviation we especially focus on MEMS gyroscopes or solid-state ring lasers, and fibre optic gyroscopes. In small-scale aerial robotics, we mostly care for MEMS gyroscopes.

29 NS: Gyroscope A classical rotary gyroscope relies on the law of conversation of angular momentum. The total angular momentum of a system remains constant in both magnitude and direction of the resultant external torque acting upon the system is zero. Gyroscopes exploiting this principle, typically consist of a spinning disk or mass on an axle, which is then mounted on a series of gimbals. Each of these gimbals provides the spinning disk an additional degree of freedom. Therefore, as long as the gyroscope is spinning, it will maintain a constant orientation. In the case that external torques or rotations about a given axis are present in these devices, orientation can be maintained, and measurement of angular velocity can take place - due to the phenomenon of precession. The phenomenon of precession takes place when an object that is spinning about some axis (its "spin axis") has an external torque applied in a direction perpendicular to the spin axis (the input axis). In a rotational system, when net external torques are present, the angular momentum vector (along the spin axis) will move in the direction of the applied external torque vector. Consequently, the spin axis rotates about an axis that is perpendicular to both the input axis and the spin axis (this is now the output axis). This rotation about the output axis is then sensed and fed back to the input axis where a motor-like device applies torque in the opposite direction therefore canceling the precession of the gyroscope and maintaining its orientation. To measure rotation rate, counteracting torque is pulsed at periodic time intervals. Each pulse represents a fixed step of angular rotataion, and the pulse count in a fixed time interval will be proportional to the angle change θ over that time period.
30 NS: Gyroscope MEMS gyroscopes are micro vibrating structures that base their operation the phenomenon of Coriolis force. In a rotating system, every point rotates with the same rotational speed. As one approaches the axis of rotation of this system, the rotational speed remains the same, but the speed in the direction perpendicular to the rotation axis decreases. In order to travel along a straight line towards or away from the axis of rotation, lateral speed must be adjusted in order to maintain the same relative angular position on the body. The Coriolis force corresponds to the product of the object mass (whose longitude is to be maintained) times the acceleration that leads to the required slowing down or speeding up. The Coriolis force is proportional to both the angular velocity of the rotating object, as well as to the velocity of the object moving towards or away from the axis of rotation.
31 NS: Gyroscope Fabrication: a micro-machined mass which is connected to an outer housing by a pair of springs. This outer housing is then connected to the fixed circuit board using a second set of orthogonal springs. The test mass is continuously driven sinusoidally along the first set of springs. As any rotation of the system will induce Coriolis acceleration in the mass, it will subsequently push it in the direction of the second set of springs. As the mass is driven away from the axis of rotation, the mass will be pushed perpendicularly in one direction, and as it is driven back toward the axis of rotation, it will be pushed in the opposite direction, due to the Coriolis force acting on the mass. Coriolis force sensing: Coriolis force is sensed and detected by capacitive sense fingers that are integrated along the test mass housing and the rigid structure. As the test mass is pushed by the Coriolis force, a differential capacitance will develop and will be detected as the sensing fingers are brought closer together. When the mass is pushed in the opposite direction, different sets of sense fingers are brought closer together. The sensor can detect both the magnitude as well as the direction of the angular velocity of the system.
32 NS: Gyroscope Bias effects on Gyros: The biggest problem with gyros (and what essentially constraints us from simply performing integrating actions on their measurements), is the existence of bias effects. Bias are mostly caused by: Drive excitation feedthrough Output electronics offsets Bearing torques Biases are present in three forms - as far as their expression and time evolution is concerned - namely: Fixed bias ("const") Bias variation from one turn-on to another (thermal), called bias stability ("BS") Bias drift, usually modeled as a random walk ("BD")



33 NS: Gyroscope As the bias effect are additive, we may write: Where Q is known Error model a single-axis gyroscope: ω bias : bias model ω n : noise model
.")


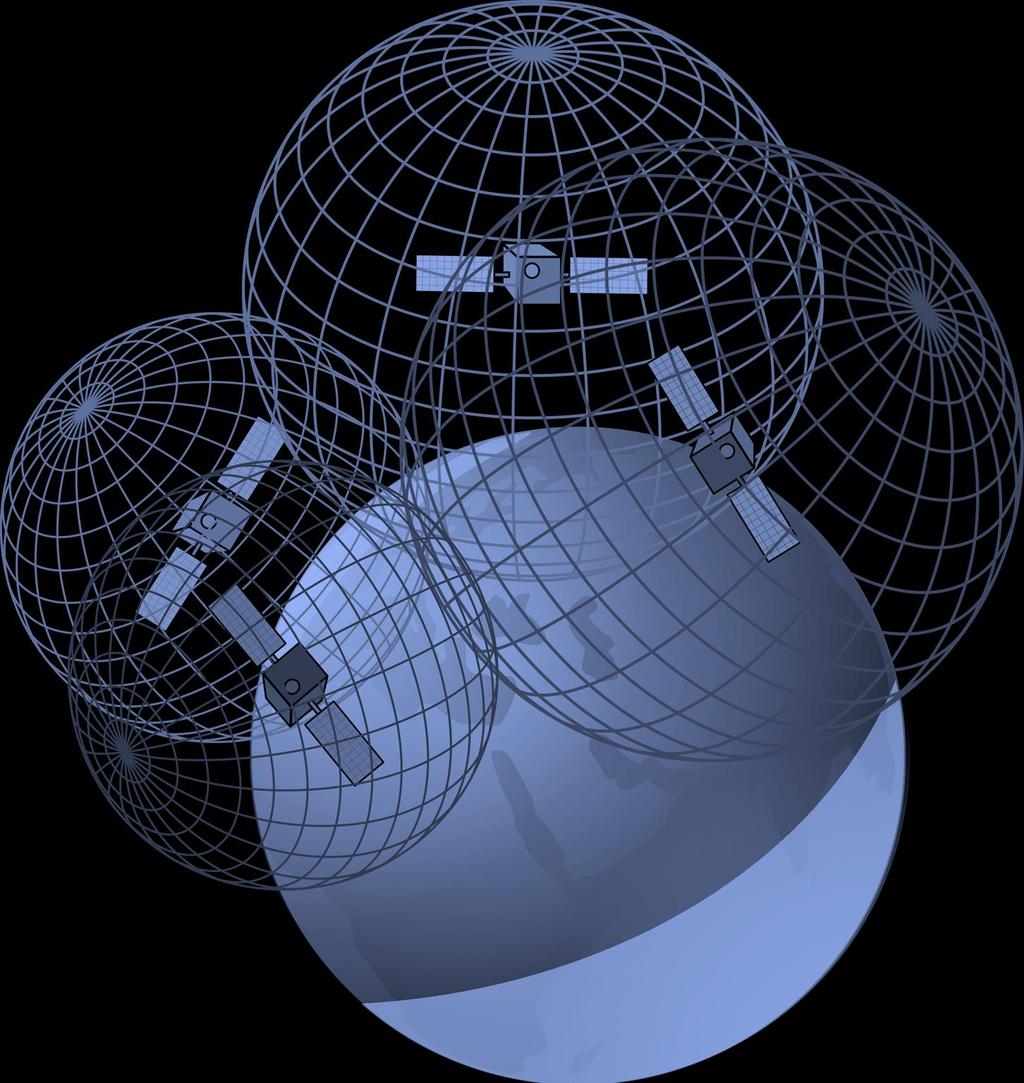
34 NS: Global Positioning System 24 Satellites orbiting the Earth (and some back-ups). Altitude set at 20,180km Any point on Earth s surface can be seen by at least 4 satellites at all times. Time-of-Flight of radio signal from 4 satellites to receiver in 3 dimensions. 4 range measurements needed to account for clock offset error. 4 nonlinear equations in 4 unknown results: Latitutde Longitutde Altitude Receiver clock time offset
35 NS: Global Positioning System Time-of-Flight of the radio signal from satellite to receiver used to calculate pseudorange. Called pseudorage to distinguish it from true range. Numerous sources of error in time-of-flight measurement: Ephemeris Data errors in satellite location Satellite clock due to clock drift. Ionosphere upper atmosphere, free electrons slow transmission of the GPS signal. Troposphere lower atmosphere, weather (temperature and density) affect speed of light, GPS signal transmission. Multipath Reception signals not following direct path Receiver measurement limitations in accuracy of the receiver timing. Small timing errors can result in large position deviations: 10ns timing error leads to 3m pseudorange error.

36 NS: GPS Trilateration Some math and an atomic clock-based stopwatch
37 NS: GPS Error Characterization Cumulative effect of GPS pseudorange errors is described by the User-Equivalent Range Error (UERE). UERE has two components: Bias Random 1σ, in m Error source Bias Random Total Ephemeris data Satellite clock Ionosphere Troposphere monitoring Multipath Receiver measurement UERE, rms Filtered UERE, rms 5,



38 NS: GPS Error Characterization Effect of satellite geometry on position calculation is expressed by dilution of precision (DOP). Satellites close together leads to high DOP. Satellites far apart leads to low DOP. DOP varies with time. Horizontal DOP (HDOP) is smaller than Vertical DOP (VDOP): Nominal HDOP = 1.3 Nominal VDOP = 1.8


39 NS: Total GPS Error Standard deviation of RMS error in the north-east plane: Standard deviation of RMS altitude error: As expected: an ellipsoidal error model.
40 NS: Indicative questions Provide the measurement model for the accelerometer and describe the types of errors as well as their nature. Provide the measurement model for the accelerometer and describe the types of errors as well as their nature. Assuming an ideal 2-axis accelerometer, how would you use it to derive an estimate of the pitch orientation of a vehicle performing only this motion? Define the sources of error for GPS systems What is the minimum amount of satellites required for a complete GPS measurement?
41 CS491/691: Introduction to Aerial Robotics Topic: State Estimation Reasoning with Bayes Law Dr. Kostas Alexis (CSE)
42 SE: The State Estimation problem We want to estimate the world state x from: Sensor measurements z and Controls u We need to model the relationship between these random variables, i.e:
43 SE: Causal vs. Diagnostic Reasoning Is diagnostic Is causal Diagnostic reasoning is typically what we need. Often causal knowledge is easier to obtain. Bayes rule allows us to use causal knowledge in diagnostic reasoning.

44 SE: Bayes rule Definition of conditional probability: Bayes rule: Observation likelihood Prior on world state Prior on sensor observations
45 SE: Normalization Direct computation of P(z) can be difficult. Idea: compute improper distribution, normalize afterwards. STEP 1: STEP 2: STEP 3:
46 SE: Normalization Direct computation of P(z) can be difficult. Idea: compute improper distribution, normalize afterwards. STEP 1: STEP 2: STEP 3:
47 SE: Example: Sensor Measurement Quadrotor seeks the Landing Zone The landing zone is marked with many bright lamps The quadrotor has a light sensor.
48 SE: Example: Sensor Measurement Binary sensor Binary world state Sensor model Prior on world state Assume: robot observes light, i.e. What is the probability the robot is above the landing zone. that

49 SE: Example: Sensor Measurement Sensor model: Prior on world state: Probability after observation (using Bayes):

50 SE: Indicative questions Consider an aerial robot searching for its landing spot using a brightness sensor. Given the sensor model: And a known prior probabilistic prior, compute the probabilities after two consecutive observations.
51 Thank you! Please ask your question!
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: Inertial Measurement Unit Dr. Kostas Alexis (CSE) Where am I? What is my environment? Robots use multiple sensors to understand where they are and how their environment
Autonomous Mobile Robot Design Topic: Inertial Measurement Unit Dr. Kostas Alexis (CSE) Where am I? What is my environment? Robots use multiple sensors to understand where they are and how their environment
CS491/691: Introduction to Aerial Robotics
 CS491/691: Introduction to Aerial Robotics Topic: Navigation Sensors Dr. Kostas Alexis (CSE) Navigation Sensors Providing the capacity to estimate the state of the aerial robot Self-Localize and estimate
CS491/691: Introduction to Aerial Robotics Topic: Navigation Sensors Dr. Kostas Alexis (CSE) Navigation Sensors Providing the capacity to estimate the state of the aerial robot Self-Localize and estimate
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: Micro Aerial Vehicle Dynamics Dr. Kostas Alexis (CSE) Goal of this lecture The goal of this lecture is to derive the equations of motion that describe the motion of
Autonomous Mobile Robot Design Topic: Micro Aerial Vehicle Dynamics Dr. Kostas Alexis (CSE) Goal of this lecture The goal of this lecture is to derive the equations of motion that describe the motion of
Sensors for mobile robots
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 2 Sensors for mobile robots Sensors are used to perceive, analyze and understand the environment
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 2 Sensors for mobile robots Sensors are used to perceive, analyze and understand the environment
EE565:Mobile Robotics Lecture 6
 EE565:Mobile Robotics Lecture 6 Welcome Dr. Ahmad Kamal Nasir Announcement Mid-Term Examination # 1 (25%) Understand basic wheel robot kinematics, common mobile robot sensors and actuators knowledge. Understand
EE565:Mobile Robotics Lecture 6 Welcome Dr. Ahmad Kamal Nasir Announcement Mid-Term Examination # 1 (25%) Understand basic wheel robot kinematics, common mobile robot sensors and actuators knowledge. Understand
CS491/691: Introduction to Aerial Robotics
 CS491/691: Introduction to Aerial Robotics Topic: State Estimation Dr. Kostas Alexis (CSE) World state (or system state) Belief state: Our belief/estimate of the world state World state: Real state of
CS491/691: Introduction to Aerial Robotics Topic: State Estimation Dr. Kostas Alexis (CSE) World state (or system state) Belief state: Our belief/estimate of the world state World state: Real state of
Theory and Practice of Rotor Dynamics Prof. Dr. Rajiv Tiwari Department of Mechanical Engineering Indian Institute of Technology Guwahati
 Theory and Practice of Rotor Dynamics Prof. Dr. Rajiv Tiwari Department of Mechanical Engineering Indian Institute of Technology Guwahati Module - 2 Simpul Rotors Lecture - 2 Jeffcott Rotor Model In the
Theory and Practice of Rotor Dynamics Prof. Dr. Rajiv Tiwari Department of Mechanical Engineering Indian Institute of Technology Guwahati Module - 2 Simpul Rotors Lecture - 2 Jeffcott Rotor Model In the
AS3010: Introduction to Space Technology
 AS3010: Introduction to Space Technology L E C T U R E 22 Part B, Lecture 22 19 April, 2017 C O N T E N T S Attitude stabilization passive and active. Actuators for three axis or active stabilization.
AS3010: Introduction to Space Technology L E C T U R E 22 Part B, Lecture 22 19 April, 2017 C O N T E N T S Attitude stabilization passive and active. Actuators for three axis or active stabilization.
Arrow Brasil. Rodrigo Rodrigues Field Application Engineer F: Date: 30/01/2014 TM 2
 TM Arrow Brasil Rodrigo Rodrigues Field Application Engineer Rodrigo.rodrigues@arrowbrasil.com.br F:+55 11 3613-9331 Date: 30/01/2014 TM 2 State-of-the-art review Introduction How a Gyro Works Performance
TM Arrow Brasil Rodrigo Rodrigues Field Application Engineer Rodrigo.rodrigues@arrowbrasil.com.br F:+55 11 3613-9331 Date: 30/01/2014 TM 2 State-of-the-art review Introduction How a Gyro Works Performance
Laws of gyroscopes / cardanic gyroscope
 Principle If the axis of rotation of the force-free gyroscope is displaced slightly, a nutation is produced. The relationship between precession frequency or nutation frequency and gyrofrequency is examined
Principle If the axis of rotation of the force-free gyroscope is displaced slightly, a nutation is produced. The relationship between precession frequency or nutation frequency and gyrofrequency is examined
Lab #4 - Gyroscopic Motion of a Rigid Body
 Lab #4 - Gyroscopic Motion of a Rigid Body Last Updated: April 6, 2007 INTRODUCTION Gyroscope is a word used to describe a rigid body, usually with symmetry about an axis, that has a comparatively large
Lab #4 - Gyroscopic Motion of a Rigid Body Last Updated: April 6, 2007 INTRODUCTION Gyroscope is a word used to describe a rigid body, usually with symmetry about an axis, that has a comparatively large
Quadrotor Modeling and Control
 16-311 Introduction to Robotics Guest Lecture on Aerial Robotics Quadrotor Modeling and Control Nathan Michael February 05, 2014 Lecture Outline Modeling: Dynamic model from first principles Propeller
16-311 Introduction to Robotics Guest Lecture on Aerial Robotics Quadrotor Modeling and Control Nathan Michael February 05, 2014 Lecture Outline Modeling: Dynamic model from first principles Propeller
LAWS OF GYROSCOPES / CARDANIC GYROSCOPE
 LAWS OF GYROSCOPES / CARDANC GYROSCOPE PRNCPLE f the axis of rotation of the force-free gyroscope is displaced slightly, a nutation is produced. The relationship between precession frequency or nutation
LAWS OF GYROSCOPES / CARDANC GYROSCOPE PRNCPLE f the axis of rotation of the force-free gyroscope is displaced slightly, a nutation is produced. The relationship between precession frequency or nutation
EE 570: Location and Navigation
 EE 570: Location and Navigation Sensor Technology Stephen Bruder 1 Aly El-Osery 2 1 Electrical and Computer Engineering Department, Embry-Riddle Aeronautical Univesity Prescott, Arizona, USA 2 Electrical
EE 570: Location and Navigation Sensor Technology Stephen Bruder 1 Aly El-Osery 2 1 Electrical and Computer Engineering Department, Embry-Riddle Aeronautical Univesity Prescott, Arizona, USA 2 Electrical
Robot Dynamics - Rotary Wing UAS: Control of a Quadrotor
 Robot Dynamics Rotary Wing AS: Control of a Quadrotor 5-85- V Marco Hutter, Roland Siegwart and Thomas Stastny Robot Dynamics - Rotary Wing AS: Control of a Quadrotor 7..6 Contents Rotary Wing AS. Introduction
Robot Dynamics Rotary Wing AS: Control of a Quadrotor 5-85- V Marco Hutter, Roland Siegwart and Thomas Stastny Robot Dynamics - Rotary Wing AS: Control of a Quadrotor 7..6 Contents Rotary Wing AS. Introduction
= o + t = ot + ½ t 2 = o + 2
 Chapters 8-9 Rotational Kinematics and Dynamics Rotational motion Rotational motion refers to the motion of an object or system that spins about an axis. The axis of rotation is the line about which the
Chapters 8-9 Rotational Kinematics and Dynamics Rotational motion Rotational motion refers to the motion of an object or system that spins about an axis. The axis of rotation is the line about which the
8.012 Physics I: Classical Mechanics Fall 2008
 IT OpenCourseWare http://ocw.mit.edu 8.012 Physics I: Classical echanics Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. ASSACHUSETTS INSTITUTE
IT OpenCourseWare http://ocw.mit.edu 8.012 Physics I: Classical echanics Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. ASSACHUSETTS INSTITUTE
Gyroscopes and statics
 Gyroscopes and statics Announcements: Welcome back from Spring Break! CAPA due Friday at 10pm We will finish Chapter 11 in H+R on angular momentum and start Chapter 12 on stability. Friday we will begin
Gyroscopes and statics Announcements: Welcome back from Spring Break! CAPA due Friday at 10pm We will finish Chapter 11 in H+R on angular momentum and start Chapter 12 on stability. Friday we will begin
Chapter 11 Angular Momentum; General Rotation. Copyright 2009 Pearson Education, Inc.
 Chapter 11 Angular Momentum; General Rotation ! L = I!! Units of Chapter 11 Angular Momentum Objects Rotating About a Fixed Axis Vector Cross Product; Torque as a Vector Angular Momentum of a Particle
Chapter 11 Angular Momentum; General Rotation ! L = I!! Units of Chapter 11 Angular Momentum Objects Rotating About a Fixed Axis Vector Cross Product; Torque as a Vector Angular Momentum of a Particle
Quadcopter Dynamics 1
 Quadcopter Dynamics 1 Bréguet Richet Gyroplane No. 1 1907 Brothers Louis Bréguet and Jacques Bréguet Guidance of Professor Charles Richet The first flight demonstration of Gyroplane No. 1 with no control
Quadcopter Dynamics 1 Bréguet Richet Gyroplane No. 1 1907 Brothers Louis Bréguet and Jacques Bréguet Guidance of Professor Charles Richet The first flight demonstration of Gyroplane No. 1 with no control
8.012 Physics I: Classical Mechanics Fall 2008
 MIT OpenCourseWare http://ocw.mit.edu 8.012 Physics I: Classical Mechanics Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. MASSACHUSETTS INSTITUTE
MIT OpenCourseWare http://ocw.mit.edu 8.012 Physics I: Classical Mechanics Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. MASSACHUSETTS INSTITUTE
Modelling of Opposed Lateral and Longitudinal Tilting Dual-Fan Unmanned Aerial Vehicle
 Modelling of Opposed Lateral and Longitudinal Tilting Dual-Fan Unmanned Aerial Vehicle N. Amiri A. Ramirez-Serrano R. Davies Electrical Engineering Department, University of Calgary, Canada (e-mail: namiri@ucalgary.ca).
Modelling of Opposed Lateral and Longitudinal Tilting Dual-Fan Unmanned Aerial Vehicle N. Amiri A. Ramirez-Serrano R. Davies Electrical Engineering Department, University of Calgary, Canada (e-mail: namiri@ucalgary.ca).
Multi Rotor Scalability
 Multi Rotor Scalability With the rapid growth in popularity of quad copters and drones in general, there has been a small group of enthusiasts who propose full scale quad copter designs (usable payload
Multi Rotor Scalability With the rapid growth in popularity of quad copters and drones in general, there has been a small group of enthusiasts who propose full scale quad copter designs (usable payload
Dynamics of Machinery
 Dynamics of Machinery Two Mark Questions & Answers Varun B Page 1 Force Analysis 1. Define inertia force. Inertia force is an imaginary force, which when acts upon a rigid body, brings it to an equilibrium
Dynamics of Machinery Two Mark Questions & Answers Varun B Page 1 Force Analysis 1. Define inertia force. Inertia force is an imaginary force, which when acts upon a rigid body, brings it to an equilibrium
PHYSICS. Chapter 12 Lecture FOR SCIENTISTS AND ENGINEERS A STRATEGIC APPROACH 4/E RANDALL D. KNIGHT Pearson Education, Inc.
 PHYSICS FOR SCIENTISTS AND ENGINEERS A STRATEGIC APPROACH 4/E Chapter 12 Lecture RANDALL D. KNIGHT Chapter 12 Rotation of a Rigid Body IN THIS CHAPTER, you will learn to understand and apply the physics
PHYSICS FOR SCIENTISTS AND ENGINEERS A STRATEGIC APPROACH 4/E Chapter 12 Lecture RANDALL D. KNIGHT Chapter 12 Rotation of a Rigid Body IN THIS CHAPTER, you will learn to understand and apply the physics
Today. Why idealized? Idealized physical models of robotic vehicles. Noise. Idealized physical models of robotic vehicles
 PID controller COMP417 Introduction to Robotics and Intelligent Systems Kinematics and Dynamics Perhaps the most widely used controller in industry and robotics. Perhaps the easiest to code. You will also
PID controller COMP417 Introduction to Robotics and Intelligent Systems Kinematics and Dynamics Perhaps the most widely used controller in industry and robotics. Perhaps the easiest to code. You will also
Robot Dynamics II: Trajectories & Motion
 Robot Dynamics II: Trajectories & Motion Are We There Yet? METR 4202: Advanced Control & Robotics Dr Surya Singh Lecture # 5 August 23, 2013 metr4202@itee.uq.edu.au http://itee.uq.edu.au/~metr4202/ 2013
Robot Dynamics II: Trajectories & Motion Are We There Yet? METR 4202: Advanced Control & Robotics Dr Surya Singh Lecture # 5 August 23, 2013 metr4202@itee.uq.edu.au http://itee.uq.edu.au/~metr4202/ 2013
Chapter 1 Lecture 2. Introduction 2. Topics. Chapter-1
 Chapter 1 Lecture 2 Introduction 2 Topics 1.4 Equilibrium of airplane 1.5 Number of equations of motion for airplane in flight 1.5.1 Degrees of freedom 1.5.2 Degrees of freedom for a rigid airplane 1.6
Chapter 1 Lecture 2 Introduction 2 Topics 1.4 Equilibrium of airplane 1.5 Number of equations of motion for airplane in flight 1.5.1 Degrees of freedom 1.5.2 Degrees of freedom for a rigid airplane 1.6
with Application to Autonomous Vehicles
 Nonlinear with Application to Autonomous Vehicles (Ph.D. Candidate) C. Silvestre (Supervisor) P. Oliveira (Co-supervisor) Institute for s and Robotics Instituto Superior Técnico Portugal January 2010 Presentation
Nonlinear with Application to Autonomous Vehicles (Ph.D. Candidate) C. Silvestre (Supervisor) P. Oliveira (Co-supervisor) Institute for s and Robotics Instituto Superior Técnico Portugal January 2010 Presentation
TTK4190 Guidance and Control Exam Suggested Solution Spring 2011
 TTK4190 Guidance and Control Exam Suggested Solution Spring 011 Problem 1 A) The weight and buoyancy of the vehicle can be found as follows: W = mg = 15 9.81 = 16.3 N (1) B = 106 4 ( ) 0.6 3 3 π 9.81 =
TTK4190 Guidance and Control Exam Suggested Solution Spring 011 Problem 1 A) The weight and buoyancy of the vehicle can be found as follows: W = mg = 15 9.81 = 16.3 N (1) B = 106 4 ( ) 0.6 3 3 π 9.81 =
MAE 142 Homework #5 Due Friday, March 13, 2009
 MAE 142 Homework #5 Due Friday, March 13, 2009 Please read through the entire homework set before beginning. Also, please label clearly your answers and summarize your findings as concisely as possible.
MAE 142 Homework #5 Due Friday, March 13, 2009 Please read through the entire homework set before beginning. Also, please label clearly your answers and summarize your findings as concisely as possible.
Chapter 8 Lecture Notes
 Chapter 8 Lecture Notes Physics 2414 - Strauss Formulas: v = l / t = r θ / t = rω a T = v / t = r ω / t =rα a C = v 2 /r = ω 2 r ω = ω 0 + αt θ = ω 0 t +(1/2)αt 2 θ = (1/2)(ω 0 +ω)t ω 2 = ω 0 2 +2αθ τ
Chapter 8 Lecture Notes Physics 2414 - Strauss Formulas: v = l / t = r θ / t = rω a T = v / t = r ω / t =rα a C = v 2 /r = ω 2 r ω = ω 0 + αt θ = ω 0 t +(1/2)αt 2 θ = (1/2)(ω 0 +ω)t ω 2 = ω 0 2 +2αθ τ
ENHANCED PROPORTIONAL-DERIVATIVE CONTROL OF A MICRO QUADCOPTER
 ENHANCED PROPORTIONAL-DERIVATIVE CONTROL OF A MICRO QUADCOPTER Norman L. Johnson and Kam K. Leang Department of Mechanical Engineering University of Nevada, Reno Reno, Nevada 897-312, USA ABSTRACT This
ENHANCED PROPORTIONAL-DERIVATIVE CONTROL OF A MICRO QUADCOPTER Norman L. Johnson and Kam K. Leang Department of Mechanical Engineering University of Nevada, Reno Reno, Nevada 897-312, USA ABSTRACT This
Sensors & Actuators. Velocity and acceleration Sensors & Actuators - H.Sarmento
 Sensors & Actuators Velocity and acceleration 014-015 Sensors & Actuators - H.Sarmento Outline Velocity sensors Gyroscopes Accelerometers 014-015 Sensors & Actuators - H.Sarmento 1 Velocity and acceleration
Sensors & Actuators Velocity and acceleration 014-015 Sensors & Actuators - H.Sarmento Outline Velocity sensors Gyroscopes Accelerometers 014-015 Sensors & Actuators - H.Sarmento 1 Velocity and acceleration
Mechatronics Assignment # 1
 Problem # 1 Consider a closed-loop, rotary, speed-control system with a proportional controller K p, as shown below. The inertia of the rotor is J. The damping coefficient B in mechanical systems is usually
Problem # 1 Consider a closed-loop, rotary, speed-control system with a proportional controller K p, as shown below. The inertia of the rotor is J. The damping coefficient B in mechanical systems is usually
THE GYROSCOPE REFERENCES
 THE REFERENCES The Feynman Lectures on Physics, Chapter 20 (this has a very nice, intuitive description of the operation of the gyroscope) Copy available at the Resource Centre. Most Introductory Physics
THE REFERENCES The Feynman Lectures on Physics, Chapter 20 (this has a very nice, intuitive description of the operation of the gyroscope) Copy available at the Resource Centre. Most Introductory Physics
Rotational Kinematics and Dynamics. UCVTS AIT Physics
 Rotational Kinematics and Dynamics UCVTS AIT Physics Angular Position Axis of rotation is the center of the disc Choose a fixed reference line Point P is at a fixed distance r from the origin Angular Position,
Rotational Kinematics and Dynamics UCVTS AIT Physics Angular Position Axis of rotation is the center of the disc Choose a fixed reference line Point P is at a fixed distance r from the origin Angular Position,
5.12 The Aerodynamic Assist Trajectories of Vehicles Propelled by Solar Radiation Pressure References...
 1 The Two-Body Problem... 1 1.1 Position of the Problem... 1 1.2 The Conic Sections and Their Geometrical Properties... 12 1.3 The Elliptic Orbits... 20 1.4 The Hyperbolic and Parabolic Trajectories...
1 The Two-Body Problem... 1 1.1 Position of the Problem... 1 1.2 The Conic Sections and Their Geometrical Properties... 12 1.3 The Elliptic Orbits... 20 1.4 The Hyperbolic and Parabolic Trajectories...
Inertial Frame frame-dragging
 Frame Dragging Frame Dragging An Inertial Frame is a frame that is not accelerating (in the sense of proper acceleration that would be detected by an accelerometer). In Einstein s theory of General Relativity
Frame Dragging Frame Dragging An Inertial Frame is a frame that is not accelerating (in the sense of proper acceleration that would be detected by an accelerometer). In Einstein s theory of General Relativity
Torque and Rotation Lecture 7
 Torque and Rotation Lecture 7 ˆ In this lecture we finally move beyond a simple particle in our mechanical analysis of motion. ˆ Now we consider the so-called rigid body. Essentially, a particle with extension
Torque and Rotation Lecture 7 ˆ In this lecture we finally move beyond a simple particle in our mechanical analysis of motion. ˆ Now we consider the so-called rigid body. Essentially, a particle with extension
Mathematical Modelling and Dynamics Analysis of Flat Multirotor Configurations
 Mathematical Modelling and Dynamics Analysis of Flat Multirotor Configurations DENIS KOTARSKI, Department of Mechanical Engineering, Karlovac University of Applied Sciences, J.J. Strossmayera 9, Karlovac,
Mathematical Modelling and Dynamics Analysis of Flat Multirotor Configurations DENIS KOTARSKI, Department of Mechanical Engineering, Karlovac University of Applied Sciences, J.J. Strossmayera 9, Karlovac,
6. 3D Kinematics DE2-EA 2.1: M4DE. Dr Connor Myant
 DE2-EA 2.1: M4DE Dr Connor Myant 6. 3D Kinematics Comments and corrections to connor.myant@imperial.ac.uk Lecture resources may be found on Blackboard and at http://connormyant.com Contents Three-Dimensional
DE2-EA 2.1: M4DE Dr Connor Myant 6. 3D Kinematics Comments and corrections to connor.myant@imperial.ac.uk Lecture resources may be found on Blackboard and at http://connormyant.com Contents Three-Dimensional
Textbook Reference: Wilson, Buffa, Lou: Chapter 8 Glencoe Physics: Chapter 8
 AP Physics Rotational Motion Introduction: Which moves with greater speed on a merry-go-round - a horse near the center or one near the outside? Your answer probably depends on whether you are considering
AP Physics Rotational Motion Introduction: Which moves with greater speed on a merry-go-round - a horse near the center or one near the outside? Your answer probably depends on whether you are considering
VN-100 Velocity Compensation
 VN-100 Velocity Compensation Velocity / Airspeed Aiding for AHRS Applications Application Note Abstract This application note describes how the VN-100 can be used in non-stationary applications which require
VN-100 Velocity Compensation Velocity / Airspeed Aiding for AHRS Applications Application Note Abstract This application note describes how the VN-100 can be used in non-stationary applications which require
Robot Control Basics CS 685
 Robot Control Basics CS 685 Control basics Use some concepts from control theory to understand and learn how to control robots Control Theory general field studies control and understanding of behavior
Robot Control Basics CS 685 Control basics Use some concepts from control theory to understand and learn how to control robots Control Theory general field studies control and understanding of behavior
Influence of electromagnetic stiffness on coupled micro vibrations generated by solar array drive assembly
 Influence of electromagnetic stiffness on coupled micro vibrations generated by solar array drive assembly Mariyam Sattar 1, Cheng Wei 2, Awais Jalali 3 1, 2 Beihang University of Aeronautics and Astronautics,
Influence of electromagnetic stiffness on coupled micro vibrations generated by solar array drive assembly Mariyam Sattar 1, Cheng Wei 2, Awais Jalali 3 1, 2 Beihang University of Aeronautics and Astronautics,
Chapter 8 Rotational Motion
 Chapter 8 Rotational Motion Chapter 8 Rotational Motion In this chapter you will: Learn how to describe and measure rotational motion. Learn how torque changes rotational velocity. Explore factors that
Chapter 8 Rotational Motion Chapter 8 Rotational Motion In this chapter you will: Learn how to describe and measure rotational motion. Learn how torque changes rotational velocity. Explore factors that
EN40: Dynamics and Vibrations. Final Examination Wed May : 2pm-5pm
 EN40: Dynamics and Vibrations Final Examination Wed May 10 017: pm-5pm School of Engineering Brown University NAME: General Instructions No collaboration of any kind is permitted on this examination. You
EN40: Dynamics and Vibrations Final Examination Wed May 10 017: pm-5pm School of Engineering Brown University NAME: General Instructions No collaboration of any kind is permitted on this examination. You
Attitude Determination and. Attitude Control
 Attitude Determination and Placing the telescope in orbit is not the end of the story. It is necessary to point the telescope towards the selected targets, or to scan the selected sky area with the telescope.
Attitude Determination and Placing the telescope in orbit is not the end of the story. It is necessary to point the telescope towards the selected targets, or to scan the selected sky area with the telescope.
Adaptive Trim and Trajectory Following for a Tilt-Rotor Tricopter Ahmad Ansari, Anna Prach, and Dennis S. Bernstein
 7 American Control Conference Sheraton Seattle Hotel May 4 6, 7, Seattle, USA Adaptive Trim and Trajectory Following for a Tilt-Rotor Tricopter Ahmad Ansari, Anna Prach, and Dennis S. Bernstein Abstract
7 American Control Conference Sheraton Seattle Hotel May 4 6, 7, Seattle, USA Adaptive Trim and Trajectory Following for a Tilt-Rotor Tricopter Ahmad Ansari, Anna Prach, and Dennis S. Bernstein Abstract
Rotational Dynamics. A wrench floats weightlessly in space. It is subjected to two forces of equal and opposite magnitude: Will the wrench accelerate?
 Rotational Dynamics A wrench floats weightlessly in space. It is subjected to two forces of equal and opposite magnitude: Will the wrench accelerate? A. yes B. no C. kind of? Rotational Dynamics 10.1-3
Rotational Dynamics A wrench floats weightlessly in space. It is subjected to two forces of equal and opposite magnitude: Will the wrench accelerate? A. yes B. no C. kind of? Rotational Dynamics 10.1-3
Angular Momentum L = I ω
 Angular Momentum L = Iω If no NET external Torques act on a system then Angular Momentum is Conserved. Linitial = I ω = L final = Iω Angular Momentum L = Iω Angular Momentum L = I ω A Skater spins with
Angular Momentum L = Iω If no NET external Torques act on a system then Angular Momentum is Conserved. Linitial = I ω = L final = Iω Angular Momentum L = Iω Angular Momentum L = I ω A Skater spins with
l Every object in a state of uniform motion tends to remain in that state of motion unless an
 Motion and Machine Unit Notes DO NOT LOSE! Name: Energy Ability to do work To cause something to change move or directions Energy cannot be created or destroyed, but transferred from one form to another.
Motion and Machine Unit Notes DO NOT LOSE! Name: Energy Ability to do work To cause something to change move or directions Energy cannot be created or destroyed, but transferred from one form to another.
Chapter 1. Introduction. 1.1 System Architecture
 Chapter 1 Introduction 1.1 System Architecture The objective of this book is to prepare the reader to do research in the exciting and rapidly developing field of autonomous navigation, guidance, and control
Chapter 1 Introduction 1.1 System Architecture The objective of this book is to prepare the reader to do research in the exciting and rapidly developing field of autonomous navigation, guidance, and control
PHY131H1F - Class 18. Torque of a quick push
 Today: Today, Chapter 11: PHY131H1F - Class 18 Angular velocity and Angular acceleration vectors Torque and the Vector Cross Product Angular Momentum Conservation of Angular Momentum Gyroscopes and Precession
Today: Today, Chapter 11: PHY131H1F - Class 18 Angular velocity and Angular acceleration vectors Torque and the Vector Cross Product Angular Momentum Conservation of Angular Momentum Gyroscopes and Precession
Dead Reckoning navigation (DR navigation)
") Dead Reckoning navigation (DR navigation) Prepared by A.Kaviyarasu Assistant Professor Department of Aerospace Engineering Madras Institute Of Technology Chromepet, Chennai A Navigation which uses a Inertial
Dead Reckoning navigation (DR navigation) Prepared by A.Kaviyarasu Assistant Professor Department of Aerospace Engineering Madras Institute Of Technology Chromepet, Chennai A Navigation which uses a Inertial
Physics I. Unit 1 Methods in Science (Systems of Units) Competencies (Do) Students should be able to demonstrate scientific methods.
 Competencies (Do) Students should be able to demonstrate scientific methods.") Physics I Unit 1 Methods in Science (Systems of Units) Estimated Time Frame Big Ideas for Units 10 Days Tools are needed for the study of Physics, such as measurement, conversions, significant figures,
Physics I Unit 1 Methods in Science (Systems of Units) Estimated Time Frame Big Ideas for Units 10 Days Tools are needed for the study of Physics, such as measurement, conversions, significant figures,
7. The gyroscope. 7.1 Introduction. 7.2 Theory. a) The gyroscope
 The gyroscope") K 7. The gyroscope 7.1 Introduction This experiment concerns a special type of motion of a gyroscope, called precession. From the angular frequency of the precession, the moment of inertia of the spinning
K 7. The gyroscope 7.1 Introduction This experiment concerns a special type of motion of a gyroscope, called precession. From the angular frequency of the precession, the moment of inertia of the spinning
Design and modelling of an airship station holding controller for low cost satellite operations
 AIAA Guidance, Navigation, and Control Conference and Exhibit 15-18 August 25, San Francisco, California AIAA 25-62 Design and modelling of an airship station holding controller for low cost satellite
AIAA Guidance, Navigation, and Control Conference and Exhibit 15-18 August 25, San Francisco, California AIAA 25-62 Design and modelling of an airship station holding controller for low cost satellite
Flight Dynamics and Control
 Flight Dynamics and Control Lecture 1: Introduction G. Dimitriadis University of Liege Reference material Lecture Notes Flight Dynamics Principles, M.V. Cook, Arnold, 1997 Fundamentals of Airplane Flight
Flight Dynamics and Control Lecture 1: Introduction G. Dimitriadis University of Liege Reference material Lecture Notes Flight Dynamics Principles, M.V. Cook, Arnold, 1997 Fundamentals of Airplane Flight
Physics 101 Final Exam Problem Guide
 Physics 101 Final Exam Problem Guide Liam Brown, Physics 101 Tutor C.Liam.Brown@gmail.com General Advice Focus on one step at a time don t try to imagine the whole solution at once. Draw a lot of diagrams:
Physics 101 Final Exam Problem Guide Liam Brown, Physics 101 Tutor C.Liam.Brown@gmail.com General Advice Focus on one step at a time don t try to imagine the whole solution at once. Draw a lot of diagrams:
Name: Date: Period: AP Physics C Rotational Motion HO19
 1.) A wheel turns with constant acceleration 0.450 rad/s 2. (9-9) Rotational Motion H19 How much time does it take to reach an angular velocity of 8.00 rad/s, starting from rest? Through how many revolutions
1.) A wheel turns with constant acceleration 0.450 rad/s 2. (9-9) Rotational Motion H19 How much time does it take to reach an angular velocity of 8.00 rad/s, starting from rest? Through how many revolutions
Final Exam April 30, 2013
 Final Exam Instructions: You have 120 minutes to complete this exam. This is a closed-book, closed-notes exam. You are allowed to use a calculator during the exam. Usage of mobile phones and other electronic
Final Exam Instructions: You have 120 minutes to complete this exam. This is a closed-book, closed-notes exam. You are allowed to use a calculator during the exam. Usage of mobile phones and other electronic
YPP December 2012: Angular Momentum Makes the World Go Round
 YPP December 2012: Angular Momentum Makes the World Go Round Laboratory Introduction The purpose of this lab is to study the various aspects of rotation to determine how shape, size, mass, or distribution
YPP December 2012: Angular Momentum Makes the World Go Round Laboratory Introduction The purpose of this lab is to study the various aspects of rotation to determine how shape, size, mass, or distribution
Name: Fall 2014 CLOSED BOOK
 Name: Fall 2014 1. Rod AB with weight W = 40 lb is pinned at A to a vertical axle which rotates with constant angular velocity ω =15 rad/s. The rod position is maintained by a horizontal wire BC. Determine
Name: Fall 2014 1. Rod AB with weight W = 40 lb is pinned at A to a vertical axle which rotates with constant angular velocity ω =15 rad/s. The rod position is maintained by a horizontal wire BC. Determine
Angular Momentum L = I ω
 Angular Momentum L = Iω If no NET external Torques act on a system then Angular Momentum is Conserved. Linitial = I ω = L final = Iω Angular Momentum L = Iω Angular Momentum L = I ω A Skater spins with
Angular Momentum L = Iω If no NET external Torques act on a system then Angular Momentum is Conserved. Linitial = I ω = L final = Iω Angular Momentum L = Iω Angular Momentum L = I ω A Skater spins with
Lecture PowerPoints. Chapter 11. Physics for Scientists and Engineers, with Modern Physics, 4 th edition Giancoli
 Lecture PowerPoints Chapter 11 Physics for Scientists and Engineers, with Modern Physics, 4 th edition Giancoli 2009 Pearson Education, Inc. This work is protected by United States copyright laws and is
Lecture PowerPoints Chapter 11 Physics for Scientists and Engineers, with Modern Physics, 4 th edition Giancoli 2009 Pearson Education, Inc. This work is protected by United States copyright laws and is
Rotational Kinematics
 Rotational Kinematics Rotational Coordinates Ridged objects require six numbers to describe their position and orientation: 3 coordinates 3 axes of rotation Rotational Coordinates Use an angle θ to describe
Rotational Kinematics Rotational Coordinates Ridged objects require six numbers to describe their position and orientation: 3 coordinates 3 axes of rotation Rotational Coordinates Use an angle θ to describe
GyroRotor program : user manual
 GyroRotor program : user manual Jean Fourcade January 18, 2016 1 1 Introduction This document is the user manual of the GyroRotor program and will provide you with description of
GyroRotor program : user manual Jean Fourcade January 18, 2016 1 1 Introduction This document is the user manual of the GyroRotor program and will provide you with description of
Webreview Torque and Rotation Practice Test
 Please do not write on test. ID A Webreview - 8.2 Torque and Rotation Practice Test Multiple Choice Identify the choice that best completes the statement or answers the question. 1. A 0.30-m-radius automobile
Please do not write on test. ID A Webreview - 8.2 Torque and Rotation Practice Test Multiple Choice Identify the choice that best completes the statement or answers the question. 1. A 0.30-m-radius automobile
OUTCOME 2 KINEMATICS AND DYNAMICS
 Unit 60: Dynamics of Machines Unit code: H/601/1411 QCF Level:4 Credit value:15 OUTCOME 2 KINEMATICS AND DYNAMICS TUTORIAL 3 GYROSCOPES 2 Be able to determine the kinetic and dynamic parameters of mechanical
Unit 60: Dynamics of Machines Unit code: H/601/1411 QCF Level:4 Credit value:15 OUTCOME 2 KINEMATICS AND DYNAMICS TUTORIAL 3 GYROSCOPES 2 Be able to determine the kinetic and dynamic parameters of mechanical
Basic Physics Content
 Basic Physics Content The purpose of these 38 questions is to let me know what your initial grasp is of the material that lies ahead. This is not graded, so don t stress out. Enjoy thinking about and answering
Basic Physics Content The purpose of these 38 questions is to let me know what your initial grasp is of the material that lies ahead. This is not graded, so don t stress out. Enjoy thinking about and answering
PLANAR KINETIC EQUATIONS OF MOTION (Section 17.2)
") PLANAR KINETIC EQUATIONS OF MOTION (Section 17.2) We will limit our study of planar kinetics to rigid bodies that are symmetric with respect to a fixed reference plane. As discussed in Chapter 16, when
PLANAR KINETIC EQUATIONS OF MOTION (Section 17.2) We will limit our study of planar kinetics to rigid bodies that are symmetric with respect to a fixed reference plane. As discussed in Chapter 16, when
General Definition of Torque, final. Lever Arm. General Definition of Torque 7/29/2010. Units of Chapter 10
 Units of Chapter 10 Determining Moments of Inertia Rotational Kinetic Energy Rotational Plus Translational Motion; Rolling Why Does a Rolling Sphere Slow Down? General Definition of Torque, final Taking
Units of Chapter 10 Determining Moments of Inertia Rotational Kinetic Energy Rotational Plus Translational Motion; Rolling Why Does a Rolling Sphere Slow Down? General Definition of Torque, final Taking
Silicon Capacitive Accelerometers. Ulf Meriheinä M.Sc. (Eng.) Business Development Manager VTI TECHNOLOGIES
 Business Development Manager VTI TECHNOLOGIES") Silicon Capacitive Accelerometers Ulf Meriheinä M.Sc. (Eng.) Business Development Manager VTI TECHNOLOGIES 1 Measuring Acceleration The acceleration measurement is based on Newton s 2nd law: Let the acceleration
Silicon Capacitive Accelerometers Ulf Meriheinä M.Sc. (Eng.) Business Development Manager VTI TECHNOLOGIES 1 Measuring Acceleration The acceleration measurement is based on Newton s 2nd law: Let the acceleration
EE 570: Location and Navigation
 EE 570: Location and Navigation Navigation Mathematics: Coordinate Frames Kevin Wedeward Aly El-Osery Electrical Engineering Department, New Mexico Tech Socorro, New Mexico, USA In Collaboration with Stephen
EE 570: Location and Navigation Navigation Mathematics: Coordinate Frames Kevin Wedeward Aly El-Osery Electrical Engineering Department, New Mexico Tech Socorro, New Mexico, USA In Collaboration with Stephen
We define angular displacement, θ, and angular velocity, ω. What's a radian?
 We define angular displacement, θ, and angular velocity, ω Units: θ = rad ω = rad/s What's a radian? Radian is the ratio between the length of an arc and its radius note: counterclockwise is + clockwise
We define angular displacement, θ, and angular velocity, ω Units: θ = rad ω = rad/s What's a radian? Radian is the ratio between the length of an arc and its radius note: counterclockwise is + clockwise
EE C245 / ME C218 INTRODUCTION TO MEMS DESIGN FALL 2009 PROBLEM SET #7. Due (at 7 p.m.): Thursday, Dec. 10, 2009, in the EE C245 HW box in 240 Cory.
: Thursday, Dec. 10, 2009, in the EE C245 HW box in 240 Cory.") Issued: Thursday, Nov. 24, 2009 PROBLEM SET #7 Due (at 7 p.m.): Thursday, Dec. 10, 2009, in the EE C245 HW box in 240 Cory. 1. Gyroscopes are inertial sensors that measure rotation rate, which is an extremely
Issued: Thursday, Nov. 24, 2009 PROBLEM SET #7 Due (at 7 p.m.): Thursday, Dec. 10, 2009, in the EE C245 HW box in 240 Cory. 1. Gyroscopes are inertial sensors that measure rotation rate, which is an extremely
End-of-Chapter Exercises
 End-of-Chapter Exercises Exercises 1 12 are conceptual questions that are designed to see if you have understood the main concepts of the chapter. 1. Figure 11.21 shows four different cases involving a
End-of-Chapter Exercises Exercises 1 12 are conceptual questions that are designed to see if you have understood the main concepts of the chapter. 1. Figure 11.21 shows four different cases involving a
Lecture Module 5: Introduction to Attitude Stabilization and Control
 1 Lecture Module 5: Introduction to Attitude Stabilization and Control Lectures 1-3 Stability is referred to as a system s behaviour to external/internal disturbances (small) in/from equilibrium states.
1 Lecture Module 5: Introduction to Attitude Stabilization and Control Lectures 1-3 Stability is referred to as a system s behaviour to external/internal disturbances (small) in/from equilibrium states.
Rolling, Torque, Angular Momentum
 Chapter 11 Rolling, Torque, Angular Momentum Copyright 11.2 Rolling as Translational and Rotation Combined Motion of Translation : i.e.motion along a straight line Motion of Rotation : rotation about a
Chapter 11 Rolling, Torque, Angular Momentum Copyright 11.2 Rolling as Translational and Rotation Combined Motion of Translation : i.e.motion along a straight line Motion of Rotation : rotation about a
UNIT-I (FORCE ANALYSIS)
") DHANALAKSHMI SRINIVASAN INSTITUTE OF RESEACH AND TECHNOLOGY DEPARTMENT OF MECHANICAL ENGINEERING QUESTION BANK ME2302 DYNAMICS OF MACHINERY III YEAR/ V SEMESTER UNIT-I (FORCE ANALYSIS) PART-A (2 marks)
DHANALAKSHMI SRINIVASAN INSTITUTE OF RESEACH AND TECHNOLOGY DEPARTMENT OF MECHANICAL ENGINEERING QUESTION BANK ME2302 DYNAMICS OF MACHINERY III YEAR/ V SEMESTER UNIT-I (FORCE ANALYSIS) PART-A (2 marks)
Translational and Rotational Dynamics!
 Translational and Rotational Dynamics Robert Stengel Robotics and Intelligent Systems MAE 345, Princeton University, 217 Copyright 217 by Robert Stengel. All rights reserved. For educational use only.
Translational and Rotational Dynamics Robert Stengel Robotics and Intelligent Systems MAE 345, Princeton University, 217 Copyright 217 by Robert Stengel. All rights reserved. For educational use only.
Theory & Practice of Rotor Dynamics Prof. Rajiv Tiwari Department of Mechanical Engineering Indian Institute of Technology Guwahati
 Theory & Practice of Rotor Dynamics Prof. Rajiv Tiwari Department of Mechanical Engineering Indian Institute of Technology Guwahati Module - 8 Balancing Lecture - 1 Introduce To Rigid Rotor Balancing Till
Theory & Practice of Rotor Dynamics Prof. Rajiv Tiwari Department of Mechanical Engineering Indian Institute of Technology Guwahati Module - 8 Balancing Lecture - 1 Introduce To Rigid Rotor Balancing Till
EE 570: Location and Navigation
 EE 570: Location and Navigation Sensor Technology Stephen Bruder 1 Aly El-Osery 2 1 Electrical and Computer Engineering Department, Embry-Riddle Aeronautical Univesity Prescott, Arizona, USA 2 Electrical
EE 570: Location and Navigation Sensor Technology Stephen Bruder 1 Aly El-Osery 2 1 Electrical and Computer Engineering Department, Embry-Riddle Aeronautical Univesity Prescott, Arizona, USA 2 Electrical
1.053J/2.003J Dynamics and Control I Fall Final Exam 18 th December, 2007
 1.053J/2.003J Dynamics and Control I Fall 2007 Final Exam 18 th December, 2007 Important Notes: 1. You are allowed to use three letter-size sheets (two-sides each) of notes. 2. There are five (5) problems
1.053J/2.003J Dynamics and Control I Fall 2007 Final Exam 18 th December, 2007 Important Notes: 1. You are allowed to use three letter-size sheets (two-sides each) of notes. 2. There are five (5) problems
Chapter 9. Rotational Dynamics
 Chapter 9 Rotational Dynamics In pure translational motion, all points on an object travel on parallel paths. The most general motion is a combination of translation and rotation. 1) Torque Produces angular
Chapter 9 Rotational Dynamics In pure translational motion, all points on an object travel on parallel paths. The most general motion is a combination of translation and rotation. 1) Torque Produces angular
Video 1.1 Vijay Kumar and Ani Hsieh
 Video 1.1 Vijay Kumar and Ani Hsieh 1 Robotics: Dynamics and Control Vijay Kumar and Ani Hsieh University of Pennsylvania 2 Why? Robots live in a physical world The physical world is governed by the laws
Video 1.1 Vijay Kumar and Ani Hsieh 1 Robotics: Dynamics and Control Vijay Kumar and Ani Hsieh University of Pennsylvania 2 Why? Robots live in a physical world The physical world is governed by the laws
Two dimensional rate gyro bias estimation for precise pitch and roll attitude determination utilizing a dual arc accelerometer array
 Rochester Institute of Technology RIT Scholar Works Theses Thesis/Dissertation Collections -- Two dimensional rate gyro bias estimation for precise pitch and roll attitude determination utilizing a dual
Rochester Institute of Technology RIT Scholar Works Theses Thesis/Dissertation Collections -- Two dimensional rate gyro bias estimation for precise pitch and roll attitude determination utilizing a dual
Lecture PowerPoints. Chapter 10 Physics for Scientists and Engineers, with Modern Physics, 4 th edition Giancoli
 Lecture PowerPoints Chapter 10 Physics for Scientists and Engineers, with Modern Physics, 4 th edition Giancoli 2009 Pearson Education, Inc. This work is protected by United States copyright laws and is
Lecture PowerPoints Chapter 10 Physics for Scientists and Engineers, with Modern Physics, 4 th edition Giancoli 2009 Pearson Education, Inc. This work is protected by United States copyright laws and is
Dynamics of Rotational Motion: Rotational Inertia
 Dynamics of Rotational Motion: Rotational Inertia Bởi: OpenStaxCollege If you have ever spun a bike wheel or pushed a merry-go-round, you know that force is needed to change angular velocity as seen in
Dynamics of Rotational Motion: Rotational Inertia Bởi: OpenStaxCollege If you have ever spun a bike wheel or pushed a merry-go-round, you know that force is needed to change angular velocity as seen in
Torque. Introduction. Torque. PHY torque - J. Hedberg
 Torque PHY 207 - torque - J. Hedberg - 2017 1. Introduction 2. Torque 1. Lever arm changes 3. Net Torques 4. Moment of Rotational Inertia 1. Moment of Inertia for Arbitrary Shapes 2. Parallel Axis Theorem
Torque PHY 207 - torque - J. Hedberg - 2017 1. Introduction 2. Torque 1. Lever arm changes 3. Net Torques 4. Moment of Rotational Inertia 1. Moment of Inertia for Arbitrary Shapes 2. Parallel Axis Theorem
Chapter 8 - Rotational Dynamics and Equilibrium REVIEW
 Pagpalain ka! (Good luck, in Filipino) Date Chapter 8 - Rotational Dynamics and Equilibrium REVIEW TRUE/FALSE. Write 'T' if the statement is true and 'F' if the statement is false. 1) When a rigid body
Pagpalain ka! (Good luck, in Filipino) Date Chapter 8 - Rotational Dynamics and Equilibrium REVIEW TRUE/FALSE. Write 'T' if the statement is true and 'F' if the statement is false. 1) When a rigid body
EE C245 / ME C218 INTRODUCTION TO MEMS DESIGN FALL 2011 C. Nguyen PROBLEM SET #7. Table 1: Gyroscope Modeling Parameters
 Issued: Wednesday, Nov. 23, 2011. PROBLEM SET #7 Due (at 7 p.m.): Thursday, Dec. 8, 2011, in the EE C245 HW box in 240 Cory. 1. Gyroscopes are inertial sensors that measure rotation rate, which is an extremely
Issued: Wednesday, Nov. 23, 2011. PROBLEM SET #7 Due (at 7 p.m.): Thursday, Dec. 8, 2011, in the EE C245 HW box in 240 Cory. 1. Gyroscopes are inertial sensors that measure rotation rate, which is an extremely
MEAM 510 Fall 2012 Bruce D. Kothmann
 Balancing g Robot Control MEAM 510 Fall 2012 Bruce D. Kothmann Agenda Bruce s Controls Resume Simple Mechanics (Statics & Dynamics) of the Balancing Robot Basic Ideas About Feedback & Stability Effects
Balancing g Robot Control MEAM 510 Fall 2012 Bruce D. Kothmann Agenda Bruce s Controls Resume Simple Mechanics (Statics & Dynamics) of the Balancing Robot Basic Ideas About Feedback & Stability Effects
Physics 105 Final Practice Exam
 Physics 105 Final Practice Exam LAST Name (print)*: FIRST Name (print)*: Signature*: UIN #*: * Please fill in all required fields PROBLEM POINTS SCORE 1 15 2 15 3 15 4 15 5 15 6 25 TOTAL 100 Giving or
Physics 105 Final Practice Exam LAST Name (print)*: FIRST Name (print)*: Signature*: UIN #*: * Please fill in all required fields PROBLEM POINTS SCORE 1 15 2 15 3 15 4 15 5 15 6 25 TOTAL 100 Giving or
AP Physics C: Rotation II. (Torque and Rotational Dynamics, Rolling Motion) Problems
 Problems") AP Physics C: Rotation II (Torque and Rotational Dynamics, Rolling Motion) Problems 1980M3. A billiard ball has mass M, radius R, and moment of inertia about the center of mass I c = 2 MR²/5 The ball is
AP Physics C: Rotation II (Torque and Rotational Dynamics, Rolling Motion) Problems 1980M3. A billiard ball has mass M, radius R, and moment of inertia about the center of mass I c = 2 MR²/5 The ball is
MEAM 510 Fall 2011 Bruce D. Kothmann
 Balancing g Robot Control MEAM 510 Fall 2011 Bruce D. Kothmann Agenda Bruce s Controls Resume Simple Mechanics (Statics & Dynamics) of the Balancing Robot Basic Ideas About Feedback & Stability Effects
Balancing g Robot Control MEAM 510 Fall 2011 Bruce D. Kothmann Agenda Bruce s Controls Resume Simple Mechanics (Statics & Dynamics) of the Balancing Robot Basic Ideas About Feedback & Stability Effects
EE 570: Location and Navigation
 EE 570: Location and Navigation Sensor Technology Aly El-Osery Kevin Wedeward Electrical Engineering Department, New Mexico Tech Socorro, New Mexico, USA In Collaboration with Stephen Bruder Electrical
EE 570: Location and Navigation Sensor Technology Aly El-Osery Kevin Wedeward Electrical Engineering Department, New Mexico Tech Socorro, New Mexico, USA In Collaboration with Stephen Bruder Electrical
Big Idea 4: Interactions between systems can result in changes in those systems. Essential Knowledge 4.D.1: Torque, angular velocity, angular
 Unit 7: Rotational Motion (angular kinematics, dynamics, momentum & energy) Name: Big Idea 3: The interactions of an object with other objects can be described by forces. Essential Knowledge 3.F.1: Only
Unit 7: Rotational Motion (angular kinematics, dynamics, momentum & energy) Name: Big Idea 3: The interactions of an object with other objects can be described by forces. Essential Knowledge 3.F.1: Only