|
|
|
- Grace Hudson
- 5 years ago
- Views:
Transcription
1
2

3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30

31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58

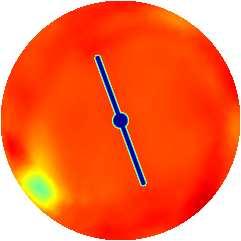
59 5.1 2D example 59 Figure 5.1: Parabolic velocity field in a straight two-dimensional pipe. Figure 5.2: Concentration on the input boundary of the pipe. The vertical axis corresponds to r 2 -coordinate, and the horizontal axis corresponds to time. Time evolves from right to left. constant pressure gradient [26]. The radius of the pipe was 5 cm, and the length of the pipe segment was 40 cm. The mean velocity v 1,mean was assumed to be 450 cm s 1. Assuming that the fluid is saline, the Reynolds number Re is of order Hence, in fact, the laminar assumption behind the Navier-Stokes model is not valid; usually the flow gets turbulent when the Re is of order However, the goal of this study is not accurate modeling of fluid dynamics but testing the state estimation approach in the case that the velocity field is known. The future steps of the research will include improving the fluid dynamical models. On the other hand, it appears in Section that the estimation scheme is not very sensitive to mismodeling the fluid dynamics of the system. That is, the state estimates are often usable even when the velocity field is somewhat biased. The time-varying concentration distribution c t was computed by using the finite element approximation of the convection-diffusion model ( ), see Chapter 3. Figure 5.2 represents the Dirichlet data c in = c in ( r, t) on the input boundary Ω in. The concentration distribution was computed using a spatially uniform FE mesh with 1698 nodes and 3240 elements. A few states of the concentration distribution 1 are shown in Figure 5.4 (left column). Simulated measurements The voltage measurements were simulated by using the FE approximation of the complete electrode model, as described in Section 4.2. The internal potential u was approximated with second order basis functions [209]. The placement of the electrodes, and the FE mesh are illustrated in Figure 5.3 (left hand side). The EIT 1 In the sequel the (simulated) target distribution is referred to as the true concentration distribution, although it does not represent a real life process. This notation is used in order to distinguish the actual target evolution and the estimates.
60 60 5. Imaging of time-varying concentration distributions FE mesh is nonuniform. Specifically, the mesh is refined in the neighbourhood of electrodes, where the current density is highest. Such a choice is known to reduce modeling errors due to discretization significantly. The number of elements in the FE mesh was When computing the EIT measurements, the dependence between concentration and conductivity (see Section 4.2.4) was taken to be linear, instead of model (4.35). This choice, however, does not induce any particular relief since the observation model is nonlinear in any case. Moreover, since the CD and EIT FE meshes were not conformal, interpolation between these meshes was needed. Linear interpolation was used. Figure 5.3: The FE mesh used in EIT computations. The denser grid on the left hand side was used in forward simulations, and the grid on the right hand side in inverse computations. The thick lines indicate the placement of electrodes. The voltages corresponding to each current injection were assumed to be measured instantly. As noticed in Section 4.4, this is usually an adequate approximation. The time between consecutive current injections was assumed to be 5 ms. Since the mean velocity v 1,mean was 450 cm s 1, the target moved, on average, 2.25 cm during each of these time intervals. Furthermore, a frame of measurements in stationary inversion consists of measurements corresponding to 16 current injections. Thus, during one frame target moves in average about 35 cm. Bear in mind that the length of the pipe segment was 40 cm. These figures indicate that the rate of target change is very high in comparison with the rate of EIT measurements, and thus it is expectable that stationary estimation methods do not provide very reliable estimates in this case. The computed voltages were corrupted with observation noise. The simulated observation noise consisted of two components, both being zero-mean Gaussian noise. The standard deviation (std) of the first component was 1% of the corresponding observation, and the std of the second component was 0.1% of the maximum voltage State estimation with known velocity field The state estimates for the concentration were computed by using the linearized Kalman filter and the fixed-interval Kalman smoother. That is, the nonstationary observation model of EIT (4.55) was linearized at a global linearization point c, see Section The globally linearized observation model of EIT is of the form V t = R t (c ) + J R t (c t c ) + v t (5.2)
61
62
63 5.1 2D example 63 Figure 5.4: Left column) The true concentration distribution; Middle column) Kalman filter estimates; Right column) Fixed-interval Kalman smoother estimates.
64 64 5. Imaging of time-varying concentration distributions Figure 5.5: Variances of the estimation error for Kalman filter (left) and the fixed-interval Kalman smoother (right). where V consists of one frame, that is, measurements corresponding to 16 current injections. The optimization problem (5.11) was solved with Gauss-Newton iteration. The regularization matrix L c was chosen to be a first order discrete differential operator, corresponding to smoothness prior (see Section 4.3.2). More specifically, the matrix product L c c gives the components of the gradient c( r) in every element of the FE mesh [104, 105]. Note that since c is approximated in a piecewise linear basis, the gradient in each element is constant. The regularization parameter α was tuned based on a (simulated) stationary data set corresponding to one state of the concentration distribution. The stationary estimates ĉ α corresponding to four frames of the nonstationary data set are shown in Figure 5.6. As expected the stationary estimates are not very useful because the target changes considerably during the measurement set. It is worth to point out that perhaps unexpectedly the stationary estimates corresponding to a nonstationary target are generally not temporal averages of the true distribution. Figure 5.6: Stationary reconstructions Sensitivity to mismodeling of velocity fields To investigate the robustness of the estimation scheme, several CD models with biased velocity fields were constructed. In all these models the velocity profile was assumed to be of parabolic form (5.1). However, the average velocity v 1,mean was
65 5.1 2D example 65 biased. All the other parameters in the CD model were selected as in the case of correct velocity field, see Section 5.3. The state estimates coresponding to biased evolution models were computed by using the Kalman filter ( ). Again, no spatial prior information was used in state estimation. Figure 5.7 illustrates the evolution of two state estimates, corresponding to models with average velocities 200 cm s 1 and 700 cm s 1. As expected, the state estimates with biased CD models are not as accurate as the estimates with the correct CD model (See Figure 5.4, middle column). However, taking into account that the assumption of flow field behind these estimates is highly biased (by more than 50 %), the estimates are surprisingly reliable. Next, the reliability of the state estimates was evaluated by relative estimation error ẽ c ẽ c = 1 T ( ) 2 ct t c Ω t dω dt. (5.12) T 0 Ω c2 t dω Figure 5.8 (left hand side) displays the relative estimation error ẽ c for state estimates corresponding to average velocities v 1,mean = 0 cm s 1,..., 900 cm s 1. Predictably, the estimation error gets smaller when the average velocity in the evolution model gets closer to the correct value 450 cm s 1. Furthermore, it can be deduced that small even moderate inaccuracies in CD model do not result severe errors in the state estimates. This is an important feature, because in the real applications of process tomography the velocity field is not usually known accurately. For numerical study in which the shape of the velocity profile is also incorrect, see [181]. Now that the state estimates have been computed corresponding to different a priori determined velocity fields, it is relevant to pose a question: Is it possible to estimate the velocity field based on EIT? In other words, given the estimates corresponding to different evolution models, can we infer which model is the most accurate one? Such considerations are clearly associated with the question of how informative the EIT measurements are. Strictly speaking, the inference of the velocity field necessitates that computed voltages V t = Rt (c t k ) corresponding to state estimate with accurate model fit better with the measured voltages V t than computed voltages corresponding to inaccurate models. This is not necessarily quaranteed, since the measured voltages are always corrupted with observation noise. In addition, the observation model can also be biased. In order to seek for an answer to above questions, the variance of the discrepancy between the measured and the computed voltages ẽ V = 1 T N V T V t V t 2 2 (5.13) was calculated for all the state estimates corresponding to average velocities v 1,mean = 0 cm s 1,..., 900 cm s 1. The results are illustrated in Figure 5.8 (right hand side). Mere visual inspection of the variance plot gives an image that the mean velocity probably is, roughly, 500cm s 1, because the descrepancy t=1
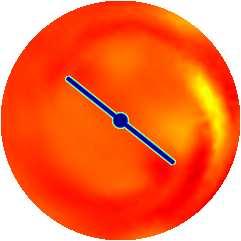
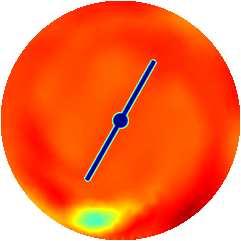
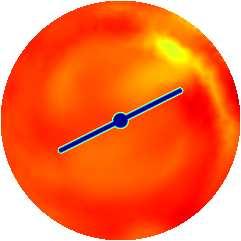
66 66 5. Imaging of time-varying concentration distributions Figure 5.7: The true concentration distribution (Left column), and the Kalman filter estimates with biased evolution models. The middle column corresponds to evolution model with average velocity 200 cm s 1 and the right column 700 cm s 1. The true average velocity was 450 cm s 1.
67

68
, the Kalman filter estimates (middle column) and the")
69 5.3 Parameters of the CD model 69 Figure 5.10: The 3D pipe flow example. The true concentration distribution (left column), the Kalman filter estimates (middle column) and the fixed-interval Kalman smoother estimates (right column).
70 70 5. Imaging of time-varying concentration distributions The stochastic CD model is of the form c t+1 = F t c t + s t+1 + w t+1, (5.14) see Chapter 3 and Appendix 2. Thus, in state estimation the matrix F t, the vector s t+1 and the covariance of the state noise w t+1 are needed. Computation of the state transition matrix F t requires the velocity field v and the diffusion coefficient κ. In this chapter both v and κ are assumed to be known (albeit in Section the assumed velocity field v is incorrect). Further, the deterministic input term s t+1 is of the form s t+1 = Y c in,t+1 (5.15) where the matrix Y = Y ( v, κ) is defined in Appendix 2, and c in,t+1 is the average input concentration. Because the best homogeneous estimate for the concentration ĉ bh can be considered as an estimate for the average concentration, ĉ bh was here used as c in,t+1. Furthermore, the stochastic input term w t+1 in (5.14) is of the form w t = Y η t + He t where the matrix H = H( v, κ) is also defined in Appendix 2. The first noise term, η t, is the stochastic (unknown) part of the input. The second term e t N (0, Γ et ) models the uncertainty/inaccuracy of the discretized CD equation in the nodes of the FE mesh. If the input noise η t is approximated with Gaussian distribution, η t N (0, Γ ηt ), the state noise w t is also Gaussian, and the covariance matrix of the noise w t is Γ wt = Y Γ ηt Y T + HΓ et H T. (5.16) Thus, the parameters that need to be fixed before state estimation are: v, κ, c in,t+1, Γ ηt and Γ et. In addition, the initial guess for concentration, c 0 0 and the associated covariance Γ 0 0 are needed. Table 5.1 lists the chosen values for all these parameters. The parameter values are expressed in terms of ĉ bh, the best homogeneous estimate. Explanation is given below. Table 5.1: Parameters of the stochastic CD model. Parameter Symbol Value Velocity field v assumed to be known Diffusion coefficient κ assumed to be known Deterministic input c in,t ĉ bh Covariance of the input noise Γ ηt ( 4ĉbh) 1 2 I Covariance of the nodal noise Γ et ( 1 I Initial concentration c 0 0 ĉ bh Initial covariance Γ 0 0 ( 1 I Table 5.1 is illustrative, because it shows how the parameters in state estimation can be selected based on a priori knowledge of the target. Consider for example the stochastic input term η t. According to Table 5.1 the std of the η t
71

72
73
74
75
76
77 6.4 Example 3: Nonsymmetric velocity field 77 Figure 6.1: Example 1: Parabolic velocity field. Left column) The true concentration distribution; Middle column) Extended Kalman filter estimates; Right column) true (dotted line) and estimated velocity profile (solid line).
78 78 6. Estimation of velocity fields Figure 6.2: Example 1: Parabolic velocity field. Left) Time evolution of the estimate for the mean velocity (solid line). The dashed line represents the true mean velocity. Right) Profiles of the true velocity (dashed line) and the estimated velocity (solid line) at the final time step Figure 6.3: Example 2: Time-dependent velocity field. Left) Time evolution of the estimate for the mean velocity (solid line). The dashed line represents the true mean velocity. Right) Profiles of the true velocity (dashed line) and the estimated velocity (solid line) at the final time step. The true and the estimated velocity profile at the final time step are drawn in Figure 6.5. The quality of the estimate is very good, taking into account that it is impossible to write the true velocity profile exactly as linear combination of the chosen basis functions. The state estimates are illustrated in Figure 6.6. Again the estimates for both the concentration and velocity are very close to true values.
79 6.5 Discussion Figure 6.4: Example 3: Nonsymmetric velocity field. Left) Profile of the true velocity field; Right) Profiles of the three basic functions for the velocity field Figure 6.5: Example 3: Nonsymmetric velocity field. Profiles of the true velocity (dashed line) and the estimated velocity (solid line) at the final time step. 6.5 Discussion In this chapter the state estimation problem in process tomography was considered in cases that the velocity field is partly unknown. The velocity estimation problem was written in the form of parameter identification problem, and the velocity parameters were estimated simultaneously with the concentration distribution on basis of the EIT observations. The numerical results indicate that estimation of velocity fields based on EIT is possible, at least with certain accuracy. However, certain limitations for accuracy of the velocity estimates exist. Taking into account that even the conventional reconstruction problem determining the concentration distribution is an ill-posed inverse problem, it is clear that increasing the number
80 80 6. Estimation of velocity fields Figure 6.6: Example 3: Nonsymmetric velocity field. Left column) The true concentration distribution; Middle column) Extended Kalman filter estimates; Right column) true (dotted line) and estimated velocity profile (solid line).
81
82
83
84
85 7.2 Application to a stationary case Figure 7.2: Left) The finite element mesh. The thick lines on the boundary represent the electrodes. Right) The velocity field used in the convection-diffusion model Results Figure 7.3 shows a set of nonstationary EIT reconstructions together with snapshots from the video. The images correspond to sampling times t = 4, 8,..., 40. The reconstrucions are quite feasible, although the radial location of the resistive target (ball) is a bit inaccurate at certain times. Further, at certain time steps the ball is stretched in the reconstructions. This is due to the use of single phase flow models in modeling the target evolution. Indeed, a more careful analysis of the reconstructions reveals that streching of the ball occurs at instants when sensitivity of the EIT measurements is low at the location of the ball; at those instants the movement of the ball is solely based on prediction obtained using the (singlephase) evolution model. However, when the ball moves on, and reaches a region with higher sensitivity the artefact due to single-phase flow model disappears. 7.2 Application to a stationary case In this section a stationary EIT reconstruction problem is solved by using the state estimation approach. The idea of using state estimation for solving the stationary problem was already introduced in [205] where the extended Kalman filter (EKF) was used in stationary EIT. However, the EKF recursions were found to be slow in comparison with stationary methods, especially with the conjugate gradient method. In [205] the spatial prior information was implemented to the reconstructions in the manner discussed in Section 2.4. In this section a novel, less time- and storage-demanding method for implementing the spatial prior is introduced. However, the aim of this section is only to give an example of the versatility of the state estimation approach, not suggest a novel algorithm for stationary EIT. Furthermore, only the globally linearized Kalman filter is used



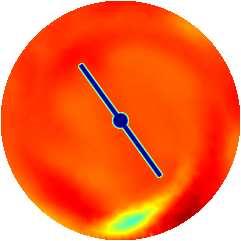
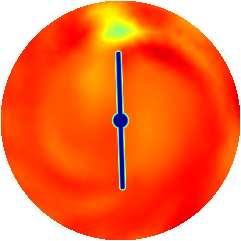
86 86 7. Experimental studies Figure 7.3: The top views of the target and the reconstructions.
87 7.2 Application to a stationary case 87 here. Consider the stationary reconstruction problem. As in the nonstationary case, the observation model corresponding to each current injection can be written separately. The globally linearized observation model of EIT is of the form V t = R t (c ) + J R t (c t c ) + v t (7.1) where V t is the voltage data corresponding to t th current injection, and all the other variables are defined as in Section In stationary case the concentration distribution does not change between consecutive current injection. Thus, stationary case the evolution model is simply c t+1 = c t (7.2) or c t+1 = F t c t + w t, where the evolution matrix is an identity matrix F t = I, and the covariance of the state noise w t is an all-zero matrix Γ wt = 0. With these models the prediction steps ( ) Kalman filter recursions take the form c t t 1 = c t 1 t 1 (7.3) Γ t t 1 = Γ t 1 t 1 (7.4) and the measurement update equations are as ( ). In principle, the stationary reconstructions can be computed using the recursions ( , ) after initializing determining the intial state c 0 and the associated covariance Γ 0. However, generally the recursions yield to unstable solutions. This is because the spatial prior information was not yet implemented to the reconstruction. The spatial prior information can be implemented to state-space representation by considering the prior information as fictious observations as in Section 2.4 and in [205]. An alternative way to incorporate the spatial prior information to the state estimates is to write prior in the initial parameters c 0 and Γ 0. Consider for example a case of smoothness prior. Now, c 0 can selected to be the expectation and Γ 0 a covariance matrix corresponding to a smoothness prior. Since the evolution model (7.2) states that the target remains unchanged during all the current injections, we have actually posed the smoothness prior for all the time instants. The above idea was tested with experiments. Figure 7.4 (top left) displays the target. The flat tank was filled with saline. In addition, two metallic sylinders were placed in the tank. The stationary reconstructions were computed by using the linearized Kalman filter as described above. The smoothness prior for the initial state was constructed in the way described in [101]. The reconstructions corresponding to first five current injections are shown in Figure 7.4. The reconstructed images clearly illustrate the performance of the algorithm. The first estimate (top row, second column) is smooth, although quite inaccurate. In the second estimate (top row, third column) the larger cylinder is already quite well localized. In the reconstructions corresponding to third, fourth and fifth current injection, both of the cylinders are tracked. After the fifth current injection the estimates remain practically unchanged.


88 88 7. Experimental studies Figure 7.4: The stationary target, and the Kalman filter reconstructions. 7.3 Discussion In this chapter two experimental studies were carried out. The aim of the first study, in Section 7.1, was the experimental evaluation of state estimation approach with fluid dynamical models. The quality of the state estimates was rather good taking into account that the target changed in such a high rate that all the stationary reconstruction schemes would have resulted useless estimates. One might criticize, however, the use of single-phase flow models in a case of multi-phase system. Indeed, the state estimates possess certain characteristic errors due to use of single-phase models. On the other hand, the fact that the state estimates are quite reliable even though the evolution model is somewhat biased is a very appealing result. In industrial applications the velocity field is never known accurately. The experimental results thus confirm the numerical results (Section 5.1.2) which suggested that the state estimates are relatively tolerant to mismodeling the velocity field. Further, the nonstationary example in Section 7.1 illustrates an interesting feature associated with nonstationary imaging. In this example, in fact, the movement of the target improves the sensitivity of the tomographic system in comparison with the stationary case. Keep in mind that the electric current was injected repetitively between a single pair of electrodes. In a stationary case such a choice would result in poor reconstructions due to low overall sensitivity of the measurements. In nonstationary case, however, the whole target got scanned due to rotation, and the reconstructions were quite reliable. The second study, in Section 7.2, illustrated how the state estimation approach
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
Adaptive C1 Macroelements for Fourth Order and Divergence-Free Problems
 Adaptive C1 Macroelements for Fourth Order and Divergence-Free Problems Roy Stogner Computational Fluid Dynamics Lab Institute for Computational Engineering and Sciences University of Texas at Austin March
Adaptive C1 Macroelements for Fourth Order and Divergence-Free Problems Roy Stogner Computational Fluid Dynamics Lab Institute for Computational Engineering and Sciences University of Texas at Austin March
Statistical and Computational Inverse Problems with Applications Part 2: Introduction to inverse problems and example applications
 Statistical and Computational Inverse Problems with Applications Part 2: Introduction to inverse problems and example applications Aku Seppänen Inverse Problems Group Department of Applied Physics University
Statistical and Computational Inverse Problems with Applications Part 2: Introduction to inverse problems and example applications Aku Seppänen Inverse Problems Group Department of Applied Physics University
Project 4: Navier-Stokes Solution to Driven Cavity and Channel Flow Conditions
 Project 4: Navier-Stokes Solution to Driven Cavity and Channel Flow Conditions R. S. Sellers MAE 5440, Computational Fluid Dynamics Utah State University, Department of Mechanical and Aerospace Engineering
Project 4: Navier-Stokes Solution to Driven Cavity and Channel Flow Conditions R. S. Sellers MAE 5440, Computational Fluid Dynamics Utah State University, Department of Mechanical and Aerospace Engineering
arxiv: v2 [math.na] 8 Sep 2016
![arxiv: v2 [math.na] 8 Sep 2016](/thumbs/72/66852723.jpg "arxiv: v2 [math.na] 8 Sep 2016") COMPENSATION FOR GEOMETRIC MODELING ERRORS BY ELECTRODE MOVEMENT IN ELECTRICAL IMPEDANCE TOMOGRAPHY N. HYVÖNEN, H. MAJANDER, AND S. STABOULIS arxiv:1605.07823v2 [math.na] 8 Sep 2016 Abstract. Electrical
COMPENSATION FOR GEOMETRIC MODELING ERRORS BY ELECTRODE MOVEMENT IN ELECTRICAL IMPEDANCE TOMOGRAPHY N. HYVÖNEN, H. MAJANDER, AND S. STABOULIS arxiv:1605.07823v2 [math.na] 8 Sep 2016 Abstract. Electrical
Pressure-velocity correction method Finite Volume solution of Navier-Stokes equations Exercise: Finish solving the Navier Stokes equations
 Today's Lecture 2D grid colocated arrangement staggered arrangement Exercise: Make a Fortran program which solves a system of linear equations using an iterative method SIMPLE algorithm Pressure-velocity
Today's Lecture 2D grid colocated arrangement staggered arrangement Exercise: Make a Fortran program which solves a system of linear equations using an iterative method SIMPLE algorithm Pressure-velocity
Solving PDEs with Multigrid Methods p.1
 Solving PDEs with Multigrid Methods Scott MacLachlan maclachl@colorado.edu Department of Applied Mathematics, University of Colorado at Boulder Solving PDEs with Multigrid Methods p.1 Support and Collaboration
Solving PDEs with Multigrid Methods Scott MacLachlan maclachl@colorado.edu Department of Applied Mathematics, University of Colorado at Boulder Solving PDEs with Multigrid Methods p.1 Support and Collaboration
Mini-Course 07 Kalman Particle Filters. Henrique Massard da Fonseca Cesar Cunha Pacheco Wellington Bettencurte Julio Dutra
 Mini-Course 07 Kalman Particle Filters Henrique Massard da Fonseca Cesar Cunha Pacheco Wellington Bettencurte Julio Dutra Agenda State Estimation Problems & Kalman Filter Henrique Massard Steady State
Mini-Course 07 Kalman Particle Filters Henrique Massard da Fonseca Cesar Cunha Pacheco Wellington Bettencurte Julio Dutra Agenda State Estimation Problems & Kalman Filter Henrique Massard Steady State
1 Kalman Filter Introduction
 1 Kalman Filter Introduction You should first read Chapter 1 of Stochastic models, estimation, and control: Volume 1 by Peter S. Maybec (available here). 1.1 Explanation of Equations (1-3) and (1-4) Equation
1 Kalman Filter Introduction You should first read Chapter 1 of Stochastic models, estimation, and control: Volume 1 by Peter S. Maybec (available here). 1.1 Explanation of Equations (1-3) and (1-4) Equation
Bayes Filter Reminder. Kalman Filter Localization. Properties of Gaussians. Gaussians. Prediction. Correction. σ 2. Univariate. 1 2πσ e.
 Kalman Filter Localization Bayes Filter Reminder Prediction Correction Gaussians p(x) ~ N(µ,σ 2 ) : Properties of Gaussians Univariate p(x) = 1 1 2πσ e 2 (x µ) 2 σ 2 µ Univariate -σ σ Multivariate µ Multivariate
Kalman Filter Localization Bayes Filter Reminder Prediction Correction Gaussians p(x) ~ N(µ,σ 2 ) : Properties of Gaussians Univariate p(x) = 1 1 2πσ e 2 (x µ) 2 σ 2 µ Univariate -σ σ Multivariate µ Multivariate
meters, we can re-arrange this expression to give
 Turbulence When the Reynolds number becomes sufficiently large, the non-linear term (u ) u in the momentum equation inevitably becomes comparable to other important terms and the flow becomes more complicated.
Turbulence When the Reynolds number becomes sufficiently large, the non-linear term (u ) u in the momentum equation inevitably becomes comparable to other important terms and the flow becomes more complicated.
MEASUREMENTS that are telemetered to the control
 2006 IEEE TRANSACTIONS ON POWER SYSTEMS, VOL. 19, NO. 4, NOVEMBER 2004 Auto Tuning of Measurement Weights in WLS State Estimation Shan Zhong, Student Member, IEEE, and Ali Abur, Fellow, IEEE Abstract This
2006 IEEE TRANSACTIONS ON POWER SYSTEMS, VOL. 19, NO. 4, NOVEMBER 2004 Auto Tuning of Measurement Weights in WLS State Estimation Shan Zhong, Student Member, IEEE, and Ali Abur, Fellow, IEEE Abstract This
Solution Methods. Steady convection-diffusion equation. Lecture 05
 Solution Methods Steady convection-diffusion equation Lecture 05 1 Navier-Stokes equation Suggested reading: Gauss divergence theorem Integral form The key step of the finite volume method is to integrate
Solution Methods Steady convection-diffusion equation Lecture 05 1 Navier-Stokes equation Suggested reading: Gauss divergence theorem Integral form The key step of the finite volume method is to integrate
Computational Fluid Dynamics Prof. Dr. SumanChakraborty Department of Mechanical Engineering Indian Institute of Technology, Kharagpur
 Computational Fluid Dynamics Prof. Dr. SumanChakraborty Department of Mechanical Engineering Indian Institute of Technology, Kharagpur Lecture No. #11 Fundamentals of Discretization: Finite Difference
Computational Fluid Dynamics Prof. Dr. SumanChakraborty Department of Mechanical Engineering Indian Institute of Technology, Kharagpur Lecture No. #11 Fundamentals of Discretization: Finite Difference
Lecture 2: From Linear Regression to Kalman Filter and Beyond
 Lecture 2: From Linear Regression to Kalman Filter and Beyond January 18, 2017 Contents 1 Batch and Recursive Estimation 2 Towards Bayesian Filtering 3 Kalman Filter and Bayesian Filtering and Smoothing
Lecture 2: From Linear Regression to Kalman Filter and Beyond January 18, 2017 Contents 1 Batch and Recursive Estimation 2 Towards Bayesian Filtering 3 Kalman Filter and Bayesian Filtering and Smoothing
1 Exercise: Linear, incompressible Stokes flow with FE
 Figure 1: Pressure and velocity solution for a sinking, fluid slab impinging on viscosity contrast problem. 1 Exercise: Linear, incompressible Stokes flow with FE Reading Hughes (2000), sec. 4.2-4.4 Dabrowski
Figure 1: Pressure and velocity solution for a sinking, fluid slab impinging on viscosity contrast problem. 1 Exercise: Linear, incompressible Stokes flow with FE Reading Hughes (2000), sec. 4.2-4.4 Dabrowski
Application of the Ensemble Kalman Filter to History Matching
 Application of the Ensemble Kalman Filter to History Matching Presented at Texas A&M, November 16,2010 Outline Philosophy EnKF for Data Assimilation Field History Match Using EnKF with Covariance Localization
Application of the Ensemble Kalman Filter to History Matching Presented at Texas A&M, November 16,2010 Outline Philosophy EnKF for Data Assimilation Field History Match Using EnKF with Covariance Localization
Basic Concepts in Data Reconciliation. Chapter 6: Steady-State Data Reconciliation with Model Uncertainties
 Chapter 6: Steady-State Data with Model Uncertainties CHAPTER 6 Steady-State Data with Model Uncertainties 6.1 Models with Uncertainties In the previous chapters, the models employed in the DR were considered
Chapter 6: Steady-State Data with Model Uncertainties CHAPTER 6 Steady-State Data with Model Uncertainties 6.1 Models with Uncertainties In the previous chapters, the models employed in the DR were considered
New Fast Kalman filter method
 New Fast Kalman filter method Hojat Ghorbanidehno, Hee Sun Lee 1. Introduction Data assimilation methods combine dynamical models of a system with typically noisy observations to obtain estimates of the
New Fast Kalman filter method Hojat Ghorbanidehno, Hee Sun Lee 1. Introduction Data assimilation methods combine dynamical models of a system with typically noisy observations to obtain estimates of the
Kalman Filter. Predict: Update: x k k 1 = F k x k 1 k 1 + B k u k P k k 1 = F k P k 1 k 1 F T k + Q
 Kalman Filter Kalman Filter Predict: x k k 1 = F k x k 1 k 1 + B k u k P k k 1 = F k P k 1 k 1 F T k + Q Update: K = P k k 1 Hk T (H k P k k 1 Hk T + R) 1 x k k = x k k 1 + K(z k H k x k k 1 ) P k k =(I
Kalman Filter Kalman Filter Predict: x k k 1 = F k x k 1 k 1 + B k u k P k k 1 = F k P k 1 k 1 F T k + Q Update: K = P k k 1 Hk T (H k P k k 1 Hk T + R) 1 x k k = x k k 1 + K(z k H k x k k 1 ) P k k =(I
Fluid Mechanics Prof. T.I. Eldho Department of Civil Engineering Indian Institute of Technology, Bombay. Lecture - 17 Laminar and Turbulent flows
 Fluid Mechanics Prof. T.I. Eldho Department of Civil Engineering Indian Institute of Technology, Bombay Lecture - 17 Laminar and Turbulent flows Welcome back to the video course on fluid mechanics. In
Fluid Mechanics Prof. T.I. Eldho Department of Civil Engineering Indian Institute of Technology, Bombay Lecture - 17 Laminar and Turbulent flows Welcome back to the video course on fluid mechanics. In
Computation of turbulent Prandtl number for mixed convection around a heated cylinder
 Center for Turbulence Research Annual Research Briefs 2010 295 Computation of turbulent Prandtl number for mixed convection around a heated cylinder By S. Kang AND G. Iaccarino 1. Motivation and objectives
Center for Turbulence Research Annual Research Briefs 2010 295 Computation of turbulent Prandtl number for mixed convection around a heated cylinder By S. Kang AND G. Iaccarino 1. Motivation and objectives
Before we consider two canonical turbulent flows we need a general description of turbulence.
 Chapter 2 Canonical Turbulent Flows Before we consider two canonical turbulent flows we need a general description of turbulence. 2.1 A Brief Introduction to Turbulence One way of looking at turbulent
Chapter 2 Canonical Turbulent Flows Before we consider two canonical turbulent flows we need a general description of turbulence. 2.1 A Brief Introduction to Turbulence One way of looking at turbulent
Application of the immersed boundary method to simulate flows inside and outside the nozzles
 Application of the immersed boundary method to simulate flows inside and outside the nozzles E. Noël, A. Berlemont, J. Cousin 1, T. Ménard UMR 6614 - CORIA, Université et INSA de Rouen, France emeline.noel@coria.fr,
Application of the immersed boundary method to simulate flows inside and outside the nozzles E. Noël, A. Berlemont, J. Cousin 1, T. Ménard UMR 6614 - CORIA, Université et INSA de Rouen, France emeline.noel@coria.fr,
Computational Fluid Dynamics Prof. Dr. Suman Chakraborty Department of Mechanical Engineering Indian Institute of Technology, Kharagpur
 Computational Fluid Dynamics Prof. Dr. Suman Chakraborty Department of Mechanical Engineering Indian Institute of Technology, Kharagpur Lecture No. #12 Fundamentals of Discretization: Finite Volume Method
Computational Fluid Dynamics Prof. Dr. Suman Chakraborty Department of Mechanical Engineering Indian Institute of Technology, Kharagpur Lecture No. #12 Fundamentals of Discretization: Finite Volume Method
Finite Element Model of a complex Glass Forming Process as a Tool for Control Optimization
 Excerpt from the Proceedings of the COMSOL Conference 29 Milan Finite Element Model of a complex Glass Forming Process as a Tool for Control Optimization Felix Sawo and Thomas Bernard Fraunhofer Institute
Excerpt from the Proceedings of the COMSOL Conference 29 Milan Finite Element Model of a complex Glass Forming Process as a Tool for Control Optimization Felix Sawo and Thomas Bernard Fraunhofer Institute
Friction Factors and Drag Coefficients
 Levicky 1 Friction Factors and Drag Coefficients Several equations that we have seen have included terms to represent dissipation of energy due to the viscous nature of fluid flow. For example, in the
Levicky 1 Friction Factors and Drag Coefficients Several equations that we have seen have included terms to represent dissipation of energy due to the viscous nature of fluid flow. For example, in the
An Introduction to the Kalman Filter
 An Introduction to the Kalman Filter by Greg Welch 1 and Gary Bishop 2 Department of Computer Science University of North Carolina at Chapel Hill Chapel Hill, NC 275993175 Abstract In 1960, R.E. Kalman
An Introduction to the Kalman Filter by Greg Welch 1 and Gary Bishop 2 Department of Computer Science University of North Carolina at Chapel Hill Chapel Hill, NC 275993175 Abstract In 1960, R.E. Kalman
Two-Fluid Model 41. Simple isothermal two-fluid two-phase models for stratified flow:
 Two-Fluid Model 41 If I have seen further it is by standing on the shoulders of giants. Isaac Newton, 1675 3 Two-Fluid Model Simple isothermal two-fluid two-phase models for stratified flow: Mass and momentum
Two-Fluid Model 41 If I have seen further it is by standing on the shoulders of giants. Isaac Newton, 1675 3 Two-Fluid Model Simple isothermal two-fluid two-phase models for stratified flow: Mass and momentum
Module 6: Free Convections Lecture 26: Evaluation of Nusselt Number. The Lecture Contains: Heat transfer coefficient. Objectives_template
 The Lecture Contains: Heat transfer coefficient file:///d /Web%20Course%20(Ganesh%20Rana)/Dr.%20gautam%20biswas/Final/convective_heat_and_mass_transfer/lecture26/26_1.html[12/24/2014 6:08:23 PM] Heat transfer
The Lecture Contains: Heat transfer coefficient file:///d /Web%20Course%20(Ganesh%20Rana)/Dr.%20gautam%20biswas/Final/convective_heat_and_mass_transfer/lecture26/26_1.html[12/24/2014 6:08:23 PM] Heat transfer
MAE 598 Project #1 Jeremiah Dwight
 MAE 598 Project #1 Jeremiah Dwight OVERVIEW A simple hot water tank, illustrated in Figures 1 through 3 below, consists of a main cylindrical tank and two small side pipes for the inlet and outlet. All
MAE 598 Project #1 Jeremiah Dwight OVERVIEW A simple hot water tank, illustrated in Figures 1 through 3 below, consists of a main cylindrical tank and two small side pipes for the inlet and outlet. All
Lecture 16: Relaxation methods
 Lecture 16: Relaxation methods Clever technique which begins with a first guess of the trajectory across the entire interval Break the interval into M small steps: x 1 =0, x 2,..x M =L Form a grid of points,
Lecture 16: Relaxation methods Clever technique which begins with a first guess of the trajectory across the entire interval Break the interval into M small steps: x 1 =0, x 2,..x M =L Form a grid of points,
Lecture 6: Bayesian Inference in SDE Models
 Lecture 6: Bayesian Inference in SDE Models Bayesian Filtering and Smoothing Point of View Simo Särkkä Aalto University Simo Särkkä (Aalto) Lecture 6: Bayesian Inference in SDEs 1 / 45 Contents 1 SDEs
Lecture 6: Bayesian Inference in SDE Models Bayesian Filtering and Smoothing Point of View Simo Särkkä Aalto University Simo Särkkä (Aalto) Lecture 6: Bayesian Inference in SDEs 1 / 45 Contents 1 SDEs
Introduction to Bayesian methods in inverse problems
 Introduction to Bayesian methods in inverse problems Ville Kolehmainen 1 1 Department of Applied Physics, University of Eastern Finland, Kuopio, Finland March 4 2013 Manchester, UK. Contents Introduction
Introduction to Bayesian methods in inverse problems Ville Kolehmainen 1 1 Department of Applied Physics, University of Eastern Finland, Kuopio, Finland March 4 2013 Manchester, UK. Contents Introduction
Chapter 2 Finite-Difference Discretization of the Advection-Diffusion Equation
 Chapter Finite-Difference Discretization of the Advection-Diffusion Equation. Introduction Finite-difference methods are numerical methods that find solutions to differential equations using approximate
Chapter Finite-Difference Discretization of the Advection-Diffusion Equation. Introduction Finite-difference methods are numerical methods that find solutions to differential equations using approximate
Elliptic Problems / Multigrid. PHY 604: Computational Methods for Physics and Astrophysics II
 Elliptic Problems / Multigrid Summary of Hyperbolic PDEs We looked at a simple linear and a nonlinear scalar hyperbolic PDE There is a speed associated with the change of the solution Explicit methods
Elliptic Problems / Multigrid Summary of Hyperbolic PDEs We looked at a simple linear and a nonlinear scalar hyperbolic PDE There is a speed associated with the change of the solution Explicit methods
Electrolyte Concentration Dependence of Ion Transport through Nanochannels
 Electrolyte Concentration Dependence of Ion Transport through Nanochannels Murat Bakirci mbaki001@odu.edu Yunus Erkaya yerka001@odu.edu ABSTRACT The magnitude of current through a conical nanochannel filled
Electrolyte Concentration Dependence of Ion Transport through Nanochannels Murat Bakirci mbaki001@odu.edu Yunus Erkaya yerka001@odu.edu ABSTRACT The magnitude of current through a conical nanochannel filled
Basic Aspects of Discretization
 Basic Aspects of Discretization Solution Methods Singularity Methods Panel method and VLM Simple, very powerful, can be used on PC Nonlinear flow effects were excluded Direct numerical Methods (Field Methods)
Basic Aspects of Discretization Solution Methods Singularity Methods Panel method and VLM Simple, very powerful, can be used on PC Nonlinear flow effects were excluded Direct numerical Methods (Field Methods)
dynamical zeta functions: what, why and what are the good for?
 dynamical zeta functions: what, why and what are the good for? Predrag Cvitanović Georgia Institute of Technology November 2 2011 life is intractable in physics, no problem is tractable I accept chaos
dynamical zeta functions: what, why and what are the good for? Predrag Cvitanović Georgia Institute of Technology November 2 2011 life is intractable in physics, no problem is tractable I accept chaos
Dan s Morris s Notes on Stable Fluids (Jos Stam, SIGGRAPH 1999)
") Dan s Morris s Notes on Stable Fluids (Jos Stam, SIGGRAPH 1999) This is intended to be a detailed by fairly-low-math explanation of Stam s Stable Fluids, one of the key papers in a recent series of advances
Dan s Morris s Notes on Stable Fluids (Jos Stam, SIGGRAPH 1999) This is intended to be a detailed by fairly-low-math explanation of Stam s Stable Fluids, one of the key papers in a recent series of advances
Simulating Drag Crisis for a Sphere Using Skin Friction Boundary Conditions
 Simulating Drag Crisis for a Sphere Using Skin Friction Boundary Conditions Johan Hoffman May 14, 2006 Abstract In this paper we use a General Galerkin (G2) method to simulate drag crisis for a sphere,
Simulating Drag Crisis for a Sphere Using Skin Friction Boundary Conditions Johan Hoffman May 14, 2006 Abstract In this paper we use a General Galerkin (G2) method to simulate drag crisis for a sphere,
4. DATA ASSIMILATION FUNDAMENTALS
 4. DATA ASSIMILATION FUNDAMENTALS... [the atmosphere] "is a chaotic system in which errors introduced into the system can grow with time... As a consequence, data assimilation is a struggle between chaotic
4. DATA ASSIMILATION FUNDAMENTALS... [the atmosphere] "is a chaotic system in which errors introduced into the system can grow with time... As a consequence, data assimilation is a struggle between chaotic
A surfactant-conserving volume-of-fluid method for interfacial flows with insoluble surfactant
 A surfactant-conserving volume-of-fluid method for interfacial flows with insoluble surfactant Ashley J. James Department of Aerospace Engineering and Mechanics, University of Minnesota John Lowengrub
A surfactant-conserving volume-of-fluid method for interfacial flows with insoluble surfactant Ashley J. James Department of Aerospace Engineering and Mechanics, University of Minnesota John Lowengrub
NOISE ROBUST RELATIVE TRANSFER FUNCTION ESTIMATION. M. Schwab, P. Noll, and T. Sikora. Technical University Berlin, Germany Communication System Group
 NOISE ROBUST RELATIVE TRANSFER FUNCTION ESTIMATION M. Schwab, P. Noll, and T. Sikora Technical University Berlin, Germany Communication System Group Einsteinufer 17, 1557 Berlin (Germany) {schwab noll
NOISE ROBUST RELATIVE TRANSFER FUNCTION ESTIMATION M. Schwab, P. Noll, and T. Sikora Technical University Berlin, Germany Communication System Group Einsteinufer 17, 1557 Berlin (Germany) {schwab noll
MCMC Sampling for Bayesian Inference using L1-type Priors
 MÜNSTER MCMC Sampling for Bayesian Inference using L1-type Priors (what I do whenever the ill-posedness of EEG/MEG is just not frustrating enough!) AG Imaging Seminar Felix Lucka 26.06.2012 , MÜNSTER Sampling
MÜNSTER MCMC Sampling for Bayesian Inference using L1-type Priors (what I do whenever the ill-posedness of EEG/MEG is just not frustrating enough!) AG Imaging Seminar Felix Lucka 26.06.2012 , MÜNSTER Sampling
Far Field Noise Minimization Using an Adjoint Approach
 Far Field Noise Minimization Using an Adjoint Approach Markus P. Rumpfkeil and David W. Zingg University of Toronto Institute for Aerospace Studies 4925 Dufferin Street, Toronto, Ontario, M3H 5T6, Canada
Far Field Noise Minimization Using an Adjoint Approach Markus P. Rumpfkeil and David W. Zingg University of Toronto Institute for Aerospace Studies 4925 Dufferin Street, Toronto, Ontario, M3H 5T6, Canada
Stochastic Models, Estimation and Control Peter S. Maybeck Volumes 1, 2 & 3 Tables of Contents
 Navtech Part #s Volume 1 #1277 Volume 2 #1278 Volume 3 #1279 3 Volume Set #1280 Stochastic Models, Estimation and Control Peter S. Maybeck Volumes 1, 2 & 3 Tables of Contents Volume 1 Preface Contents
Navtech Part #s Volume 1 #1277 Volume 2 #1278 Volume 3 #1279 3 Volume Set #1280 Stochastic Models, Estimation and Control Peter S. Maybeck Volumes 1, 2 & 3 Tables of Contents Volume 1 Preface Contents
Chapter 7 The Time-Dependent Navier-Stokes Equations Turbulent Flows
 Chapter 7 The Time-Dependent Navier-Stokes Equations Turbulent Flows Remark 7.1. Turbulent flows. The usually used model for turbulent incompressible flows are the incompressible Navier Stokes equations
Chapter 7 The Time-Dependent Navier-Stokes Equations Turbulent Flows Remark 7.1. Turbulent flows. The usually used model for turbulent incompressible flows are the incompressible Navier Stokes equations
EM-algorithm for Training of State-space Models with Application to Time Series Prediction
 EM-algorithm for Training of State-space Models with Application to Time Series Prediction Elia Liitiäinen, Nima Reyhani and Amaury Lendasse Helsinki University of Technology - Neural Networks Research
EM-algorithm for Training of State-space Models with Application to Time Series Prediction Elia Liitiäinen, Nima Reyhani and Amaury Lendasse Helsinki University of Technology - Neural Networks Research
This section develops numerically and analytically the geometric optimisation of
 7 CHAPTER 7: MATHEMATICAL OPTIMISATION OF LAMINAR-FORCED CONVECTION HEAT TRANSFER THROUGH A VASCULARISED SOLID WITH COOLING CHANNELS 5 7.1. INTRODUCTION This section develops numerically and analytically
7 CHAPTER 7: MATHEMATICAL OPTIMISATION OF LAMINAR-FORCED CONVECTION HEAT TRANSFER THROUGH A VASCULARISED SOLID WITH COOLING CHANNELS 5 7.1. INTRODUCTION This section develops numerically and analytically
On a Data Assimilation Method coupling Kalman Filtering, MCRE Concept and PGD Model Reduction for Real-Time Updating of Structural Mechanics Model
 On a Data Assimilation Method coupling, MCRE Concept and PGD Model Reduction for Real-Time Updating of Structural Mechanics Model 2016 SIAM Conference on Uncertainty Quantification Basile Marchand 1, Ludovic
On a Data Assimilation Method coupling, MCRE Concept and PGD Model Reduction for Real-Time Updating of Structural Mechanics Model 2016 SIAM Conference on Uncertainty Quantification Basile Marchand 1, Ludovic
Notes for CS542G (Iterative Solvers for Linear Systems)
") Notes for CS542G (Iterative Solvers for Linear Systems) Robert Bridson November 20, 2007 1 The Basics We re now looking at efficient ways to solve the linear system of equations Ax = b where in this course,
Notes for CS542G (Iterative Solvers for Linear Systems) Robert Bridson November 20, 2007 1 The Basics We re now looking at efficient ways to solve the linear system of equations Ax = b where in this course,
Lecture 9 Approximations of Laplace s Equation, Finite Element Method. Mathématiques appliquées (MATH0504-1) B. Dewals, C.
 B. Dewals, C.") Lecture 9 Approximations of Laplace s Equation, Finite Element Method Mathématiques appliquées (MATH54-1) B. Dewals, C. Geuzaine V1.2 23/11/218 1 Learning objectives of this lecture Apply the finite difference
Lecture 9 Approximations of Laplace s Equation, Finite Element Method Mathématiques appliquées (MATH54-1) B. Dewals, C. Geuzaine V1.2 23/11/218 1 Learning objectives of this lecture Apply the finite difference
3. ESTIMATION OF SIGNALS USING A LEAST SQUARES TECHNIQUE
 3. ESTIMATION OF SIGNALS USING A LEAST SQUARES TECHNIQUE 3.0 INTRODUCTION The purpose of this chapter is to introduce estimators shortly. More elaborated courses on System Identification, which are given
3. ESTIMATION OF SIGNALS USING A LEAST SQUARES TECHNIQUE 3.0 INTRODUCTION The purpose of this chapter is to introduce estimators shortly. More elaborated courses on System Identification, which are given
State Estimation using Moving Horizon Estimation and Particle Filtering
 State Estimation using Moving Horizon Estimation and Particle Filtering James B. Rawlings Department of Chemical and Biological Engineering UW Math Probability Seminar Spring 2009 Rawlings MHE & PF 1 /
State Estimation using Moving Horizon Estimation and Particle Filtering James B. Rawlings Department of Chemical and Biological Engineering UW Math Probability Seminar Spring 2009 Rawlings MHE & PF 1 /
Ergodicity in data assimilation methods
 Ergodicity in data assimilation methods David Kelly Andy Majda Xin Tong Courant Institute New York University New York NY www.dtbkelly.com April 15, 2016 ETH Zurich David Kelly (CIMS) Data assimilation
Ergodicity in data assimilation methods David Kelly Andy Majda Xin Tong Courant Institute New York University New York NY www.dtbkelly.com April 15, 2016 ETH Zurich David Kelly (CIMS) Data assimilation
Introduction to Nonlinear Dynamics and Chaos
 Introduction to Nonlinear Dynamics and Chaos Sean Carney Department of Mathematics University of Texas at Austin Sean Carney (University of Texas at Austin) Introduction to Nonlinear Dynamics and Chaos
Introduction to Nonlinear Dynamics and Chaos Sean Carney Department of Mathematics University of Texas at Austin Sean Carney (University of Texas at Austin) Introduction to Nonlinear Dynamics and Chaos
Riccati difference equations to non linear extended Kalman filter constraints
 International Journal of Scientific & Engineering Research Volume 3, Issue 12, December-2012 1 Riccati difference equations to non linear extended Kalman filter constraints Abstract Elizabeth.S 1 & Jothilakshmi.R
International Journal of Scientific & Engineering Research Volume 3, Issue 12, December-2012 1 Riccati difference equations to non linear extended Kalman filter constraints Abstract Elizabeth.S 1 & Jothilakshmi.R
CS 532: 3D Computer Vision 6 th Set of Notes
 1 CS 532: 3D Computer Vision 6 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Lecture Outline Intro to Covariance
1 CS 532: 3D Computer Vision 6 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Lecture Outline Intro to Covariance
Inverse Heat Flux Evaluation using Conjugate Gradient Methods from Infrared Imaging
 11 th International Conference on Quantitative InfraRed Thermography Inverse Heat Flux Evaluation using Conjugate Gradient Methods from Infrared Imaging by J. Sousa*, L. Villafane*, S. Lavagnoli*, and
11 th International Conference on Quantitative InfraRed Thermography Inverse Heat Flux Evaluation using Conjugate Gradient Methods from Infrared Imaging by J. Sousa*, L. Villafane*, S. Lavagnoli*, and
Chapter 10. Solids and Fluids
 Chapter 10 Solids and Fluids Surface Tension Net force on molecule A is zero Pulled equally in all directions Net force on B is not zero No molecules above to act on it Pulled toward the center of the
Chapter 10 Solids and Fluids Surface Tension Net force on molecule A is zero Pulled equally in all directions Net force on B is not zero No molecules above to act on it Pulled toward the center of the
Particle Filters. Pieter Abbeel UC Berkeley EECS. Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics
 Particle Filters Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Motivation For continuous spaces: often no analytical formulas for Bayes filter updates
Particle Filters Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Motivation For continuous spaces: often no analytical formulas for Bayes filter updates
Dimensionality influence on energy, enstrophy and passive scalar transport.
 Dimensionality influence on energy, enstrophy and passive scalar transport. M. Iovieno, L. Ducasse, S. Di Savino, L. Gallana, D. Tordella 1 The advection of a passive substance by a turbulent flow is important
Dimensionality influence on energy, enstrophy and passive scalar transport. M. Iovieno, L. Ducasse, S. Di Savino, L. Gallana, D. Tordella 1 The advection of a passive substance by a turbulent flow is important
A multigrid method for large scale inverse problems
 A multigrid method for large scale inverse problems Eldad Haber Dept. of Computer Science, Dept. of Earth and Ocean Science University of British Columbia haber@cs.ubc.ca July 4, 2003 E.Haber: Multigrid
A multigrid method for large scale inverse problems Eldad Haber Dept. of Computer Science, Dept. of Earth and Ocean Science University of British Columbia haber@cs.ubc.ca July 4, 2003 E.Haber: Multigrid
The Ensemble Kalman Filter:
 p.1 The Ensemble Kalman Filter: Theoretical formulation and practical implementation Geir Evensen Norsk Hydro Research Centre, Bergen, Norway Based on Evensen, Ocean Dynamics, Vol 5, No p. The Ensemble
p.1 The Ensemble Kalman Filter: Theoretical formulation and practical implementation Geir Evensen Norsk Hydro Research Centre, Bergen, Norway Based on Evensen, Ocean Dynamics, Vol 5, No p. The Ensemble
21 Rotating flows. Lecture 21 Spring J Nonlinear Dynamics II: Continuum Systems The Taylor-Proudman theorem
 8.354J Nonlinear Dynamics II: Continuum Systems Lecture 2 Spring 205 2 Rotating flows In our above discussion of airfoils, we have neglected viscosity which led to d Alembert s paradox. To illustrate further
8.354J Nonlinear Dynamics II: Continuum Systems Lecture 2 Spring 205 2 Rotating flows In our above discussion of airfoils, we have neglected viscosity which led to d Alembert s paradox. To illustrate further
Gaussian Process Approximations of Stochastic Differential Equations
 Gaussian Process Approximations of Stochastic Differential Equations Cédric Archambeau Dan Cawford Manfred Opper John Shawe-Taylor May, 2006 1 Introduction Some of the most complex models routinely run
Gaussian Process Approximations of Stochastic Differential Equations Cédric Archambeau Dan Cawford Manfred Opper John Shawe-Taylor May, 2006 1 Introduction Some of the most complex models routinely run
Database analysis of errors in large-eddy simulation
 PHYSICS OF FLUIDS VOLUME 15, NUMBER 9 SEPTEMBER 2003 Johan Meyers a) Department of Mechanical Engineering, Katholieke Universiteit Leuven, Celestijnenlaan 300, B3001 Leuven, Belgium Bernard J. Geurts b)
PHYSICS OF FLUIDS VOLUME 15, NUMBER 9 SEPTEMBER 2003 Johan Meyers a) Department of Mechanical Engineering, Katholieke Universiteit Leuven, Celestijnenlaan 300, B3001 Leuven, Belgium Bernard J. Geurts b)
CONDENSATION Conditional Density Propagation for Visual Tracking
 CONDENSATION Conditional Density Propagation for Visual Tracking Michael Isard and Andrew Blake Presented by Neil Alldrin Department of Computer Science & Engineering University of California, San Diego
CONDENSATION Conditional Density Propagation for Visual Tracking Michael Isard and Andrew Blake Presented by Neil Alldrin Department of Computer Science & Engineering University of California, San Diego
Iterative regularization of nonlinear ill-posed problems in Banach space
 Iterative regularization of nonlinear ill-posed problems in Banach space Barbara Kaltenbacher, University of Klagenfurt joint work with Bernd Hofmann, Technical University of Chemnitz, Frank Schöpfer and
Iterative regularization of nonlinear ill-posed problems in Banach space Barbara Kaltenbacher, University of Klagenfurt joint work with Bernd Hofmann, Technical University of Chemnitz, Frank Schöpfer and
The JHU Turbulence Databases (JHTDB)
") The JHU Turbulence Databases (JHTDB) TURBULENT CHANNEL FLOW DATA SET Data provenance: J. Graham 1, M. Lee 2, N. Malaya 2, R.D. Moser 2, G. Eyink 1 & C. Meneveau 1 Database ingest and Web Services: K. Kanov
The JHU Turbulence Databases (JHTDB) TURBULENT CHANNEL FLOW DATA SET Data provenance: J. Graham 1, M. Lee 2, N. Malaya 2, R.D. Moser 2, G. Eyink 1 & C. Meneveau 1 Database ingest and Web Services: K. Kanov
Probabilistic Graphical Models
 Probabilistic Graphical Models Brown University CSCI 2950-P, Spring 2013 Prof. Erik Sudderth Lecture 12: Gaussian Belief Propagation, State Space Models and Kalman Filters Guest Kalman Filter Lecture by
Probabilistic Graphical Models Brown University CSCI 2950-P, Spring 2013 Prof. Erik Sudderth Lecture 12: Gaussian Belief Propagation, State Space Models and Kalman Filters Guest Kalman Filter Lecture by
Lessons in Estimation Theory for Signal Processing, Communications, and Control
 Lessons in Estimation Theory for Signal Processing, Communications, and Control Jerry M. Mendel Department of Electrical Engineering University of Southern California Los Angeles, California PRENTICE HALL
Lessons in Estimation Theory for Signal Processing, Communications, and Control Jerry M. Mendel Department of Electrical Engineering University of Southern California Los Angeles, California PRENTICE HALL
Project Topic. Simulation of turbulent flow laden with finite-size particles using LBM. Leila Jahanshaloo
 Project Topic Simulation of turbulent flow laden with finite-size particles using LBM Leila Jahanshaloo Project Details Turbulent flow modeling Lattice Boltzmann Method All I know about my project Solid-liquid
Project Topic Simulation of turbulent flow laden with finite-size particles using LBM Leila Jahanshaloo Project Details Turbulent flow modeling Lattice Boltzmann Method All I know about my project Solid-liquid
Application of a Non-Linear Frequency Domain Solver to the Euler and Navier-Stokes Equations
 Application of a Non-Linear Frequency Domain Solver to the Euler and Navier-Stokes Equations Matthew McMullen and Antony Jameson and Juan J. Alonso Dept. of Aeronautics & Astronautics Stanford University
Application of a Non-Linear Frequency Domain Solver to the Euler and Navier-Stokes Equations Matthew McMullen and Antony Jameson and Juan J. Alonso Dept. of Aeronautics & Astronautics Stanford University
State Space Gaussian Processes with Non-Gaussian Likelihoods
 State Space Gaussian Processes with Non-Gaussian Likelihoods Hannes Nickisch 1 Arno Solin 2 Alexander Grigorievskiy 2,3 1 Philips Research, 2 Aalto University, 3 Silo.AI ICML2018 July 13, 2018 Outline
State Space Gaussian Processes with Non-Gaussian Likelihoods Hannes Nickisch 1 Arno Solin 2 Alexander Grigorievskiy 2,3 1 Philips Research, 2 Aalto University, 3 Silo.AI ICML2018 July 13, 2018 Outline
Some remarks on grad-div stabilization of incompressible flow simulations
 Some remarks on grad-div stabilization of incompressible flow simulations Gert Lube Institute for Numerical and Applied Mathematics Georg-August-University Göttingen M. Stynes Workshop Numerical Analysis
Some remarks on grad-div stabilization of incompressible flow simulations Gert Lube Institute for Numerical and Applied Mathematics Georg-August-University Göttingen M. Stynes Workshop Numerical Analysis
DESIGN AND IMPLEMENTATION OF SENSORLESS SPEED CONTROL FOR INDUCTION MOTOR DRIVE USING AN OPTIMIZED EXTENDED KALMAN FILTER
 INTERNATIONAL JOURNAL OF ELECTRONICS AND COMMUNICATION ENGINEERING & TECHNOLOGY (IJECET) International Journal of Electronics and Communication Engineering & Technology (IJECET), ISSN 0976 ISSN 0976 6464(Print)
INTERNATIONAL JOURNAL OF ELECTRONICS AND COMMUNICATION ENGINEERING & TECHNOLOGY (IJECET) International Journal of Electronics and Communication Engineering & Technology (IJECET), ISSN 0976 ISSN 0976 6464(Print)
MRI beyond Fourier Encoding: From array detection to higher-order field dynamics
 MRI beyond Fourier Encoding: From array detection to higher-order field dynamics K. Pruessmann Institute for Biomedical Engineering ETH Zurich and University of Zurich Parallel MRI Signal sample: m γκ,
MRI beyond Fourier Encoding: From array detection to higher-order field dynamics K. Pruessmann Institute for Biomedical Engineering ETH Zurich and University of Zurich Parallel MRI Signal sample: m γκ,
Partial differential equations
 Partial differential equations Many problems in science involve the evolution of quantities not only in time but also in space (this is the most common situation)! We will call partial differential equation
Partial differential equations Many problems in science involve the evolution of quantities not only in time but also in space (this is the most common situation)! We will call partial differential equation
Iterative Methods for Solving A x = b
 Iterative Methods for Solving A x = b A good (free) online source for iterative methods for solving A x = b is given in the description of a set of iterative solvers called templates found at netlib: http
Iterative Methods for Solving A x = b A good (free) online source for iterative methods for solving A x = b is given in the description of a set of iterative solvers called templates found at netlib: http
University of Athens School of Physics Atmospheric Modeling and Weather Forecasting Group
 University of Athens School of Physics Atmospheric Modeling and Weather Forecasting Group http://forecast.uoa.gr Data Assimilation in WAM System operations and validation G. Kallos, G. Galanis and G. Emmanouil
University of Athens School of Physics Atmospheric Modeling and Weather Forecasting Group http://forecast.uoa.gr Data Assimilation in WAM System operations and validation G. Kallos, G. Galanis and G. Emmanouil
BAE 820 Physical Principles of Environmental Systems
 BAE 820 Physical Principles of Environmental Systems Stokes' law and Reynold number Dr. Zifei Liu The motion of a particle in a fluid environment, such as air or water m dv =F(t) - F dt d - 1 4 2 3 πr3
BAE 820 Physical Principles of Environmental Systems Stokes' law and Reynold number Dr. Zifei Liu The motion of a particle in a fluid environment, such as air or water m dv =F(t) - F dt d - 1 4 2 3 πr3
Numerical Investigations on a Curved Pipe Flow
 Vienna Unversity of Technology Institute of Fluid Mechanics and Heat Transfer Numerical Investigations on a Curved Pipe Flow Bachelor Thesis by Martin Schwab Supervisors Univ.Prof. Dipl.-Phys. Dr.rer.nat.
Vienna Unversity of Technology Institute of Fluid Mechanics and Heat Transfer Numerical Investigations on a Curved Pipe Flow Bachelor Thesis by Martin Schwab Supervisors Univ.Prof. Dipl.-Phys. Dr.rer.nat.
PHYSICS. Chapter 8 Lecture FOR SCIENTISTS AND ENGINEERS A STRATEGIC APPROACH 4/E RANDALL D. KNIGHT Pearson Education, Inc.
 PHYSICS FOR SCIENTISTS AND ENGINEERS A STRATEGIC APPROACH 4/E Chapter 8 Lecture RANDALL D. KNIGHT Chapter 8. Dynamics II: Motion in a Plane IN THIS CHAPTER, you will learn to solve problems about motion
PHYSICS FOR SCIENTISTS AND ENGINEERS A STRATEGIC APPROACH 4/E Chapter 8 Lecture RANDALL D. KNIGHT Chapter 8. Dynamics II: Motion in a Plane IN THIS CHAPTER, you will learn to solve problems about motion
Chapter 17. Finite Volume Method The partial differential equation
 Chapter 7 Finite Volume Method. This chapter focusses on introducing finite volume method for the solution of partial differential equations. These methods have gained wide-spread acceptance in recent
Chapter 7 Finite Volume Method. This chapter focusses on introducing finite volume method for the solution of partial differential equations. These methods have gained wide-spread acceptance in recent
TIME SERIES ANALYSIS. Forecasting and Control. Wiley. Fifth Edition GWILYM M. JENKINS GEORGE E. P. BOX GREGORY C. REINSEL GRETA M.
 TIME SERIES ANALYSIS Forecasting and Control Fifth Edition GEORGE E. P. BOX GWILYM M. JENKINS GREGORY C. REINSEL GRETA M. LJUNG Wiley CONTENTS PREFACE TO THE FIFTH EDITION PREFACE TO THE FOURTH EDITION
TIME SERIES ANALYSIS Forecasting and Control Fifth Edition GEORGE E. P. BOX GWILYM M. JENKINS GREGORY C. REINSEL GRETA M. LJUNG Wiley CONTENTS PREFACE TO THE FIFTH EDITION PREFACE TO THE FOURTH EDITION
Optimal state estimation for numerical weather prediction using reduced order models
 Optimal state estimation for numerical weather prediction using reduced order models A.S. Lawless 1, C. Boess 1, N.K. Nichols 1 and A. Bunse-Gerstner 2 1 School of Mathematical and Physical Sciences, University
Optimal state estimation for numerical weather prediction using reduced order models A.S. Lawless 1, C. Boess 1, N.K. Nichols 1 and A. Bunse-Gerstner 2 1 School of Mathematical and Physical Sciences, University
Numerical Simulation of the Hagemann Entrainment Experiments
 CCC Annual Report UIUC, August 14, 2013 Numerical Simulation of the Hagemann Entrainment Experiments Kenneth Swartz (BSME Student) Lance C. Hibbeler (Ph.D. Student) Department of Mechanical Science & Engineering
CCC Annual Report UIUC, August 14, 2013 Numerical Simulation of the Hagemann Entrainment Experiments Kenneth Swartz (BSME Student) Lance C. Hibbeler (Ph.D. Student) Department of Mechanical Science & Engineering
ANALYSIS OF FLOW IN A CONCENTRIC ANNULUS USING FINITE ELEMENT METHOD
 Nigerian Journal of Technology (NIJOTECH) Vol 35, No 2, April 2016, pp 344 348 Copyright Faculty of Engineering, University of Nigeria, Nsukka, Print ISSN: 0331-8443, Electronic ISSN: 2467-8821 wwwnijotechcom
Nigerian Journal of Technology (NIJOTECH) Vol 35, No 2, April 2016, pp 344 348 Copyright Faculty of Engineering, University of Nigeria, Nsukka, Print ISSN: 0331-8443, Electronic ISSN: 2467-8821 wwwnijotechcom
Application of Chimera Grids in Rotational Flow
 CES Seminar Write-up Application of Chimera Grids in Rotational Flow Marc Schwalbach 292414 marc.schwalbach@rwth-aachen.de Supervisors: Dr. Anil Nemili & Emre Özkaya, M.Sc. MATHCCES RWTH Aachen University
CES Seminar Write-up Application of Chimera Grids in Rotational Flow Marc Schwalbach 292414 marc.schwalbach@rwth-aachen.de Supervisors: Dr. Anil Nemili & Emre Özkaya, M.Sc. MATHCCES RWTH Aachen University
Lecture 9. Time series prediction
 Lecture 9 Time series prediction Prediction is about function fitting To predict we need to model There are a bewildering number of models for data we look at some of the major approaches in this lecture
Lecture 9 Time series prediction Prediction is about function fitting To predict we need to model There are a bewildering number of models for data we look at some of the major approaches in this lecture
Mark Gales October y (x) x 1. x 2 y (x) Inputs. Outputs. x d. y (x) Second Output layer layer. layer.
 x 1. x 2 y (x) Inputs. Outputs. x d. y (x) Second Output layer layer. layer.") University of Cambridge Engineering Part IIB & EIST Part II Paper I0: Advanced Pattern Processing Handouts 4 & 5: Multi-Layer Perceptron: Introduction and Training x y (x) Inputs x 2 y (x) 2 Outputs x
University of Cambridge Engineering Part IIB & EIST Part II Paper I0: Advanced Pattern Processing Handouts 4 & 5: Multi-Layer Perceptron: Introduction and Training x y (x) Inputs x 2 y (x) 2 Outputs x
This chapter focuses on the study of the numerical approximation of threedimensional
 6 CHAPTER 6: NUMERICAL OPTIMISATION OF CONJUGATE HEAT TRANSFER IN COOLING CHANNELS WITH DIFFERENT CROSS-SECTIONAL SHAPES 3, 4 6.1. INTRODUCTION This chapter focuses on the study of the numerical approximation
6 CHAPTER 6: NUMERICAL OPTIMISATION OF CONJUGATE HEAT TRANSFER IN COOLING CHANNELS WITH DIFFERENT CROSS-SECTIONAL SHAPES 3, 4 6.1. INTRODUCTION This chapter focuses on the study of the numerical approximation
Introduction to Turbulence AEEM Why study turbulent flows?
 Introduction to Turbulence AEEM 7063-003 Dr. Peter J. Disimile UC-FEST Department of Aerospace Engineering Peter.disimile@uc.edu Intro to Turbulence: C1A Why 1 Most flows encountered in engineering and
Introduction to Turbulence AEEM 7063-003 Dr. Peter J. Disimile UC-FEST Department of Aerospace Engineering Peter.disimile@uc.edu Intro to Turbulence: C1A Why 1 Most flows encountered in engineering and
Analysis of incremental RLS adaptive networks with noisy links
 Analysis of incremental RLS adaptive networs with noisy lins Azam Khalili, Mohammad Ali Tinati, and Amir Rastegarnia a) Faculty of Electrical and Computer Engineering, University of Tabriz Tabriz 51664,
Analysis of incremental RLS adaptive networs with noisy lins Azam Khalili, Mohammad Ali Tinati, and Amir Rastegarnia a) Faculty of Electrical and Computer Engineering, University of Tabriz Tabriz 51664,
Chapter 5 HIGH ACCURACY CUBIC SPLINE APPROXIMATION FOR TWO DIMENSIONAL QUASI-LINEAR ELLIPTIC BOUNDARY VALUE PROBLEMS
 Chapter 5 HIGH ACCURACY CUBIC SPLINE APPROXIMATION FOR TWO DIMENSIONAL QUASI-LINEAR ELLIPTIC BOUNDARY VALUE PROBLEMS 5.1 Introduction When a physical system depends on more than one variable a general
Chapter 5 HIGH ACCURACY CUBIC SPLINE APPROXIMATION FOR TWO DIMENSIONAL QUASI-LINEAR ELLIPTIC BOUNDARY VALUE PROBLEMS 5.1 Introduction When a physical system depends on more than one variable a general
3.4 Linear Least-Squares Filter
 X(n) = [x(1), x(2),..., x(n)] T 1 3.4 Linear Least-Squares Filter Two characteristics of linear least-squares filter: 1. The filter is built around a single linear neuron. 2. The cost function is the sum
X(n) = [x(1), x(2),..., x(n)] T 1 3.4 Linear Least-Squares Filter Two characteristics of linear least-squares filter: 1. The filter is built around a single linear neuron. 2. The cost function is the sum
Computational Fluid Dynamics 2
 Seite 1 Introduction Computational Fluid Dynamics 11.07.2016 Computational Fluid Dynamics 2 Turbulence effects and Particle transport Martin Pietsch Computational Biomechanics Summer Term 2016 Seite 2
Seite 1 Introduction Computational Fluid Dynamics 11.07.2016 Computational Fluid Dynamics 2 Turbulence effects and Particle transport Martin Pietsch Computational Biomechanics Summer Term 2016 Seite 2
PREDICTION OF NONLINEAR SYSTEM BY CHAOTIC MODULAR
 Journal of Marine Science and Technology, Vol. 8, No. 3, pp. 345-35 () 345 PREDICTION OF NONLINEAR SSTEM B CHAOTIC MODULAR Chin-Tsan Wang*, Ji-Cong Chen**, and Cheng-Kuang Shaw*** Key words: chaotic module,
Journal of Marine Science and Technology, Vol. 8, No. 3, pp. 345-35 () 345 PREDICTION OF NONLINEAR SSTEM B CHAOTIC MODULAR Chin-Tsan Wang*, Ji-Cong Chen**, and Cheng-Kuang Shaw*** Key words: chaotic module,
A Summary of Some Important Points about the Coriolis Force/Mass. D a U a Dt. 1 ρ
 A Summary of Some Important Points about the Coriolis Force/Mass Introduction Newton s Second Law applied to fluids (also called the Navier-Stokes Equation) in an inertial, or absolute that is, unaccelerated,
A Summary of Some Important Points about the Coriolis Force/Mass Introduction Newton s Second Law applied to fluids (also called the Navier-Stokes Equation) in an inertial, or absolute that is, unaccelerated,