Optical Flow, KLT Feature Tracker.
|
|
|
- Lambert Parks
- 6 years ago
- Views:
Transcription
1 Optical Flow, KL Feature racker

2 Motion in Computer Vision Motion Structure rom motion Detection/segmentation with direction [1]

 o the motion ield which can be computed rom time-aring")
3 Motion Field.s.. Optical Flow [2], [3] Motion Field: an ideal representation o 3D motion as it is projected onto a camera image. Optical Flow: the approimation (or estimate) o the motion ield which can be computed rom time-aring image sequences. Under the simpliing assumptions o 1) Lambertian surace, 2) pointwise light source at ininit, and 3) no photometric distortion. hogijung@hanang.ac.kr
4 Motion Field [2] An ideal representation o 3D motion as it is projected onto a camera image. he time deriatie o the image position o all image points gien that the correspond to ied 3D points. ield : position ector he motion ield is deined as where P is a point in the scene where is the distance to that scene point. V is the relatie motion between the camera and the scene, is the translational component o the motion, and ω is the angular elocit o the motion. hogijung@hanang.ac.kr
5 Motion Field [2] Motion Field [2] P p (1) 3D point P (,,) and 2D point p (,), ocal length Motion ield can be obtained b taking the time deriatie o (1) 2 2 V V V V (2)
6 Motion Field [2] Motion Field [2] P V (3) he motion o 3D point P, V is deined as low B substituting (3) into (2), the basic equations o the motion ield is acquired 2 2 (4) V V V
7 Motion Field [2] Motion Field [2] he motion ield is the sum o two components, one o which depends on translation onl, the other on rotation onl ranslational components Rotational components (4) (5) (6)
8 Motion Field: Pure ranslation [2] Motion Field: Pure ranslation [2] I there is no rotational motion, the resulting motion ield has a peculiar spatial structure. I (5) is regarded as a unction o 2D point position, (5) 0 0 I ( 0, 0 ) is deined as in (6) 0 0 (6) (7)
![E-mail: hogijung@hanang.ac.kr Motion Field: Pure ranslation [2] Motion Field: Pure ranslation [2] Equation (7) sa that the motion ield o a pure translation is radial.](/docs-images/75/72069150/images/9-0.jpg "In particular, i <0, the ectors point awa rom p 0 ( 0, 0 ), which is called the ocus o epansion (FOE). I >0, the motion ield ectors point towards p 0, which is called the ocus o contraction.")
9 Motion Field: Pure ranslation [2] Motion Field: Pure ranslation [2] Equation (7) sa that the motion ield o a pure translation is radial. In particular, i <0, the ectors point awa rom p 0 ( 0, 0 ), which is called the ocus o epansion (FOE). I >0, the motion ield ectors point towards p 0, which is called the ocus o contraction. I =0, rom (5), all the motion ield ectors are parallel. (5) (8)
![Motion Field: Motion Paralla [6] Equation (8) sa that their lengths are inersel proportional to the depth o the corresponding 3D points. (8) http://upload.wikimedia.](/docs-images/75/72069150/images/10-0.jpg "org /wikipedia/commons/a/ab/ Paralla.gi his animation is an eample o paralla.")
10 Motion Field: Motion Paralla [6] Equation (8) sa that their lengths are inersel proportional to the depth o the corresponding 3D points. (8) /wikipedia/commons/a/ab/ Paralla.gi his animation is an eample o paralla. As the iewpoint moes side to side, the objects in the distance appear to moe more slowl than the objects close to the camera [6]. hogijung@hanang.ac.kr
11 Motion Field: Motion Paralla [2] Motion Field: Motion Paralla [2] I two 3D points are projected into one image point, that is coincident, rotational component will be the same. Notice that the motion ector V is about camera motion. (4) 2 2
12 Motion Field: Motion Paralla [2] he dierence o two points motion ield will be related with translation components. And, the will be radial w.r.t FOE or FOC FOC hogijung@hanang.ac.kr
13 Motion Field: Motion Paralla [2] Motion Paralla he relatie motion ield o two instantaneousl coincident points: 1. Does not depend on the rotational component o motion 2. Points towards (awa rom) the point p0, the anishing point o the translation direction. hogijung@hanang.ac.kr
 2 E-mail: hogijung@hanang.")
14 Motion Field: Pure Rotation w.r.t -ais [7] I there is no translation motion and rotation w.r.t - and z- ais, rom (4) 2 hogijung@hanang.ac.kr
15 Motion Field: Pure Rotation w.r.t -ais [7] ranslational Motion Distance to the point,, is constant. Rotational Motion 1 2 Distance to the point,, is changing. According to, is changing, too. hogijung@hanang.ac.kr
16 Estimation o the Optical Flow [4] hogijung@hanang.ac.kr
17 Estimation o the Optical Flow [4] he Image Brightness Constanc Equation [2] hogijung@hanang.ac.kr
18 Estimation o the Optical Flow [4] I V I t V I t I Assumption he image brightness is continuous and dierentiable as man times as needed in both the spatial and temporal domain. he image brightness can be regarded as a plane in a small area. hogijung@hanang.ac.kr
19 Optical Field: Aperture Problem [2], [4], [9] he component o the motion ield in the direction orthogonal to the spatial image gradient is not constrained b the image brightness constanc equation. Gien local inormation can determine component o optical low ector onl in direction o brightness gradient. hogijung@hanang.ac.kr
![Optical Field: Aperture Problem [2], [9] he aperture problem.](/docs-images/75/72069150/images/20-0.jpg "he grating appears to be moing down and to the right, perpendicular to")


20 Optical Field: Aperture Problem [2], [9] he aperture problem. he grating appears to be moing down and to the right, perpendicular to the orientation o the bars. But it could be moing in man other directions, such as onl down, or onl to the right. It is impossible to determine unless the ends o the bars become isible in the aperture. oblem_animated.gi hogijung@hanang.ac.kr

21 Optical Field: Methods or Determining Optical Flow [4]
22 Optical Field: Phase Correlation Method [10]
23 Optical Field: Phase Correlation Method [10]


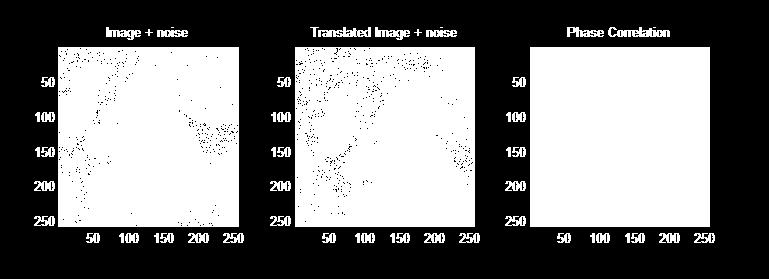
24 Optical Field: Phase Correlation Method [10]
25 Optical Field: Lucas-Kanade Method [8] Assuming that the optical low (V, ) is constant in a small window o size mm with m>1, which is center at (, ) and numbering the piels within as 1 n, n=m 2, a set o equations can be ound: I V I t hogijung@hanang.ac.kr
26 Optical Field: Lucas-Kanade Method [8] c.) Harris corner detector
27 KL Feature racker [11]
28 KL Feature racker [11] F () 로 weighting hogijung@hanang.ac.kr
29 KL Feature racker [11] I V I t KL: An Implementation o the Kanade-Lucas-omasi Feature racker hogijung@hanang.ac.kr
30 Lucas-Kanade Method: A Uniing Framework [12] Since the Lucas-Kanade algorithm was proposed in 1981 image alignment has become one o the most widel used techniques in computer ision. Besides optical low, some o its other applications include - tracking (Black and Jepson, 1998; Hager and Belhumeur, 1998), - parametric and laered motion estimation (Bergen et al., 1992), - mosaic construction (Shum and Szeliski, 2000), - medical image registration (Christensen and Johnson, 2001), - ace coding (Baker and Matthews, 2001; Cootes et al., 1998). hogijung@hanang.ac.kr
31 Lucas-Kanade Method: A Uniing Framework [12] hogijung@hanang.ac.kr
32 Lucas-Kanade Method: A Uniing Framework [12] Minimizing the epression in Equation (1) is a non-linear optimization task een i W(; p) is linear in p because the piel alues I() are, in general, non-linear in. hogijung@hanang.ac.kr
33 Lucas-Kanade Method: A Uniing Framework [12] hogijung@hanang.ac.kr
34 Lucas-Kanade Method: A Uniing Framework [12] hogijung@hanang.ac.kr
35 Lucas-Kanade Method: A Uniing Framework [12] Setting this epression to equal zero and soling gies the closed orm solution or the minimum o the epression in Equation (6) as: SD hogijung@hanang.ac.kr
36 Lucas-Kanade Method: A Uniing Framework [12] hogijung@hanang.ac.kr

![Framework [12]](/docs-images/75/72069150/images/37-1.jpg "E-mail:")
37 Lucas-Kanade Method: A Uniing Framework [12] hogijung@hanang.ac.kr
38 Reerences 1. Richard Szeliski, Dense motion estimation, Computer Vision: Algorithms and Applications, 19 June 2009 (drat), pp Emanuele rucco, Alessandro Verri, 8. Motion, Introductor echniques or 3-D Computer Vision, Prentice Hall, New Jerse 1998, pp Wikipedia, Motion ield, aailable on 4. Wikipedia, Optical low, aailable on 5. Alessandro Verri, Emanuele rucco, Finding the Epipole rom Uncalibrated Optical Flow, BMVC 1997, aailable on 6. Wikipedia, Paralle, aailable on 7. Jae Ku Suhr, Ho Gi Jung, Kwanghuk Bae, Jaihie Kim, Outlier rejection or cameras on intelligent ehicles, Pattern Recognition Letters 29 (2008) Wikipedia, Lucas-Kanade Optical Flow Method, aailable on 9. Wikipedia, Aperture Problem, aailable on Wikipedia, Phase correlation, aailable on Wikipedia, Kanade-Lucas-omasi eature tracker, aailable on er 12. Simon Baker, Iain Matthews, Lucas-Kanade 20 ears: A Uniing Framework, International Journal o Computer Vision, 56(3), , hogijung@hanang.ac.kr
Computer Vision I. Announcements
 Announcements Motion II No class Wednesda (Happ Thanksgiving) HW4 will be due Frida 1/8 Comment on Non-maximal supression CSE5A Lecture 15 Shi-Tomasi Corner Detector Filter image with a Gaussian. Compute
Announcements Motion II No class Wednesda (Happ Thanksgiving) HW4 will be due Frida 1/8 Comment on Non-maximal supression CSE5A Lecture 15 Shi-Tomasi Corner Detector Filter image with a Gaussian. Compute
Motion estimation. Digital Visual Effects Yung-Yu Chuang. with slides by Michael Black and P. Anandan
 Motion estimation Digital Visual Effects Yung-Yu Chuang with slides b Michael Black and P. Anandan Motion estimation Parametric motion image alignment Tracking Optical flow Parametric motion direct method
Motion estimation Digital Visual Effects Yung-Yu Chuang with slides b Michael Black and P. Anandan Motion estimation Parametric motion image alignment Tracking Optical flow Parametric motion direct method
Iterative Image Registration: Lucas & Kanade Revisited. Kentaro Toyama Vision Technology Group Microsoft Research
 Iterative Image Registration: Lucas & Kanade Revisited Kentaro Toyama Vision Technology Group Microsoft Research Every writer creates his own precursors. His work modifies our conception of the past, as
Iterative Image Registration: Lucas & Kanade Revisited Kentaro Toyama Vision Technology Group Microsoft Research Every writer creates his own precursors. His work modifies our conception of the past, as
Optical flow. Subhransu Maji. CMPSCI 670: Computer Vision. October 20, 2016
 Optical flow Subhransu Maji CMPSC 670: Computer Vision October 20, 2016 Visual motion Man slides adapted from S. Seitz, R. Szeliski, M. Pollefes CMPSC 670 2 Motion and perceptual organization Sometimes,
Optical flow Subhransu Maji CMPSC 670: Computer Vision October 20, 2016 Visual motion Man slides adapted from S. Seitz, R. Szeliski, M. Pollefes CMPSC 670 2 Motion and perceptual organization Sometimes,
Part I: Thin Converging Lens
 Laboratory 1 PHY431 Fall 011 Part I: Thin Converging Lens This eperiment is a classic eercise in geometric optics. The goal is to measure the radius o curvature and ocal length o a single converging lens
Laboratory 1 PHY431 Fall 011 Part I: Thin Converging Lens This eperiment is a classic eercise in geometric optics. The goal is to measure the radius o curvature and ocal length o a single converging lens
Image Alignment and Mosaicing
 Image Alignment and Mosaicing Image Alignment Applications Local alignment: Tracking Stereo Global alignment: Camera jitter elimination Image enhancement Panoramic mosaicing Image Enhancement Original
Image Alignment and Mosaicing Image Alignment Applications Local alignment: Tracking Stereo Global alignment: Camera jitter elimination Image enhancement Panoramic mosaicing Image Enhancement Original
Announcements. Tracking. Comptuer Vision I. The Motion Field. = ω. Pure Translation. Motion Field Equation. Rigid Motion: General Case
 Announcements Tracking Computer Vision I CSE5A Lecture 17 HW 3 due toda HW 4 will be on web site tomorrow: Face recognition using 3 techniques Toda: Tracking Reading: Sections 17.1-17.3 The Motion Field
Announcements Tracking Computer Vision I CSE5A Lecture 17 HW 3 due toda HW 4 will be on web site tomorrow: Face recognition using 3 techniques Toda: Tracking Reading: Sections 17.1-17.3 The Motion Field
6.869 Advances in Computer Vision. Prof. Bill Freeman March 1, 2005
 6.869 Advances in Computer Vision Prof. Bill Freeman March 1 2005 1 2 Local Features Matching points across images important for: object identification instance recognition object class recognition pose
6.869 Advances in Computer Vision Prof. Bill Freeman March 1 2005 1 2 Local Features Matching points across images important for: object identification instance recognition object class recognition pose
Lecture 12. Local Feature Detection. Matching with Invariant Features. Why extract features? Why extract features? Why extract features?
 Lecture 1 Why extract eatures? Motivation: panorama stitching We have two images how do we combine them? Local Feature Detection Guest lecturer: Alex Berg Reading: Harris and Stephens David Lowe IJCV We
Lecture 1 Why extract eatures? Motivation: panorama stitching We have two images how do we combine them? Local Feature Detection Guest lecturer: Alex Berg Reading: Harris and Stephens David Lowe IJCV We
Motion Estimation (I)
") Motion Estimation (I) Ce Liu celiu@microsoft.com Microsoft Research New England We live in a moving world Perceiving, understanding and predicting motion is an important part of our daily lives Motion
Motion Estimation (I) Ce Liu celiu@microsoft.com Microsoft Research New England We live in a moving world Perceiving, understanding and predicting motion is an important part of our daily lives Motion
Lecture Outline. Basics of Spatial Filtering Smoothing Spatial Filters. Sharpening Spatial Filters
 1 Lecture Outline Basics o Spatial Filtering Smoothing Spatial Filters Averaging ilters Order-Statistics ilters Sharpening Spatial Filters Laplacian ilters High-boost ilters Gradient Masks Combining Spatial
1 Lecture Outline Basics o Spatial Filtering Smoothing Spatial Filters Averaging ilters Order-Statistics ilters Sharpening Spatial Filters Laplacian ilters High-boost ilters Gradient Masks Combining Spatial
Video and Motion Analysis Computer Vision Carnegie Mellon University (Kris Kitani)
") Video and Motion Analysis 16-385 Computer Vision Carnegie Mellon University (Kris Kitani) Optical flow used for feature tracking on a drone Interpolated optical flow used for super slow-mo optical flow
Video and Motion Analysis 16-385 Computer Vision Carnegie Mellon University (Kris Kitani) Optical flow used for feature tracking on a drone Interpolated optical flow used for super slow-mo optical flow
Motion Estimation (I) Ce Liu Microsoft Research New England
 Ce Liu Microsoft Research New England") Motion Estimation (I) Ce Liu celiu@microsoft.com Microsoft Research New England We live in a moving world Perceiving, understanding and predicting motion is an important part of our daily lives Motion
Motion Estimation (I) Ce Liu celiu@microsoft.com Microsoft Research New England We live in a moving world Perceiving, understanding and predicting motion is an important part of our daily lives Motion
8. THEOREM If the partial derivatives f x. and f y exist near (a, b) and are continuous at (a, b), then f is differentiable at (a, b).
 and are continuous at (a, b), then f is differentiable at (a, b).") 8. THEOREM I the partial derivatives and eist near (a b) and are continuous at (a b) then is dierentiable at (a b). For a dierentiable unction o two variables z= ( ) we deine the dierentials d and d to
8. THEOREM I the partial derivatives and eist near (a b) and are continuous at (a b) then is dierentiable at (a b). For a dierentiable unction o two variables z= ( ) we deine the dierentials d and d to
Keypoint extraction: Corners Harris Corners Pkwy, Charlotte, NC
 Kepoint etraction: Corners 9300 Harris Corners Pkw Charlotte NC Wh etract kepoints? Motivation: panorama stitching We have two images how do we combine them? Wh etract kepoints? Motivation: panorama stitching
Kepoint etraction: Corners 9300 Harris Corners Pkw Charlotte NC Wh etract kepoints? Motivation: panorama stitching We have two images how do we combine them? Wh etract kepoints? Motivation: panorama stitching
. This is the Basic Chain Rule. x dt y dt z dt Chain Rule in this context.
 Math 18.0A Gradients, Chain Rule, Implicit Dierentiation, igher Order Derivatives These notes ocus on our things: (a) the application o gradients to ind normal vectors to curves suraces; (b) the generaliation
Math 18.0A Gradients, Chain Rule, Implicit Dierentiation, igher Order Derivatives These notes ocus on our things: (a) the application o gradients to ind normal vectors to curves suraces; (b) the generaliation
Lucas-Kanade Optical Flow. Computer Vision Carnegie Mellon University (Kris Kitani)
") Lucas-Kanade Optical Flow Computer Vision 16-385 Carnegie Mellon University (Kris Kitani) I x u + I y v + I t =0 I x = @I @x I y = @I u = dx v = dy I @y t = @I dt dt @t spatial derivative optical flow
Lucas-Kanade Optical Flow Computer Vision 16-385 Carnegie Mellon University (Kris Kitani) I x u + I y v + I t =0 I x = @I @x I y = @I u = dx v = dy I @y t = @I dt dt @t spatial derivative optical flow
Primary dependent variable is fluid velocity vector V = V ( r ); where r is the position vector
; where r is the position vector") Chapter 4: Flids Kinematics 4. Velocit and Description Methods Primar dependent ariable is flid elocit ector V V ( r ); where r is the position ector If V is known then pressre and forces can be determined
Chapter 4: Flids Kinematics 4. Velocit and Description Methods Primar dependent ariable is flid elocit ector V V ( r ); where r is the position ector If V is known then pressre and forces can be determined
Chapter 4 Imaging. Lecture 21. d (110) Chem 793, Fall 2011, L. Ma
 Chem 793, Fall 2011, L. Ma") Chapter 4 Imaging Lecture 21 d (110) Imaging Imaging in the TEM Diraction Contrast in TEM Image HRTEM (High Resolution Transmission Electron Microscopy) Imaging or phase contrast imaging STEM imaging a
Chapter 4 Imaging Lecture 21 d (110) Imaging Imaging in the TEM Diraction Contrast in TEM Image HRTEM (High Resolution Transmission Electron Microscopy) Imaging or phase contrast imaging STEM imaging a
Geometry review, part I
 Geometr reie, part I Geometr reie I Vectors and points points and ectors Geometric s. coordinate-based (algebraic) approach operations on ectors and points Lines implicit and parametric equations intersections,
Geometr reie, part I Geometr reie I Vectors and points points and ectors Geometric s. coordinate-based (algebraic) approach operations on ectors and points Lines implicit and parametric equations intersections,
Department of Physics PHY 111 GENERAL PHYSICS I
 EDO UNIVERSITY IYAMHO Department o Physics PHY 111 GENERAL PHYSICS I Instructors: 1. Olayinka, S. A. (Ph.D.) Email: akinola.olayinka@edouniersity.edu.ng Phone: (+234) 8062447411 2. Adekoya, M. A Email:
EDO UNIVERSITY IYAMHO Department o Physics PHY 111 GENERAL PHYSICS I Instructors: 1. Olayinka, S. A. (Ph.D.) Email: akinola.olayinka@edouniersity.edu.ng Phone: (+234) 8062447411 2. Adekoya, M. A Email:
y,z the subscript y, z indicating that the variables y and z are kept constant. The second partial differential with respect to x is written x 2 y,z
 8 Partial dierentials I a unction depends on more than one variable, its rate o change with respect to one o the variables can be determined keeping the others ied The dierential is then a partial dierential
8 Partial dierentials I a unction depends on more than one variable, its rate o change with respect to one o the variables can be determined keeping the others ied The dierential is then a partial dierential
Shai Avidan Tel Aviv University
 Image Editing in the Gradient Domain Shai Avidan Tel Aviv Universit Slide Credits (partial list) Rick Szeliski Steve Seitz Alosha Eros Yacov Hel-Or Marc Levo Bill Freeman Fredo Durand Slvain Paris Image
Image Editing in the Gradient Domain Shai Avidan Tel Aviv Universit Slide Credits (partial list) Rick Szeliski Steve Seitz Alosha Eros Yacov Hel-Or Marc Levo Bill Freeman Fredo Durand Slvain Paris Image
CS 335 Graphics and Multimedia. 2D Graphics Primitives and Transformation
 C 335 Graphics and Multimedia D Graphics Primitives and Transformation Basic Mathematical Concepts Review Coordinate Reference Frames D Cartesian Reference Frames (a) (b) creen Cartesian reference sstems
C 335 Graphics and Multimedia D Graphics Primitives and Transformation Basic Mathematical Concepts Review Coordinate Reference Frames D Cartesian Reference Frames (a) (b) creen Cartesian reference sstems
AP Calculus Notes: Unit 1 Limits & Continuity. Syllabus Objective: 1.1 The student will calculate limits using the basic limit theorems.
 Syllabus Objective:. The student will calculate its using the basic it theorems. LIMITS how the outputs o a unction behave as the inputs approach some value Finding a Limit Notation: The it as approaches
Syllabus Objective:. The student will calculate its using the basic it theorems. LIMITS how the outputs o a unction behave as the inputs approach some value Finding a Limit Notation: The it as approaches
Dynamics of the Atmosphere 11:670:324. Class Time: Tuesdays and Fridays 9:15-10:35
 Dnamics o the Atmosphere 11:67:34 Class Time: Tesdas and Fridas 9:15-1:35 Instrctors: Dr. Anthon J. Broccoli (ENR 9) broccoli@ensci.rtgers.ed 73-93-98 6 Dr. Benjamin Lintner (ENR 5) lintner@ensci.rtgers.ed
Dnamics o the Atmosphere 11:67:34 Class Time: Tesdas and Fridas 9:15-1:35 Instrctors: Dr. Anthon J. Broccoli (ENR 9) broccoli@ensci.rtgers.ed 73-93-98 6 Dr. Benjamin Lintner (ENR 5) lintner@ensci.rtgers.ed
Chapter 8 Laminar Flows with Dependence on One Dimension
 Chapter 8 Laminar Flows with Dependence on One Dimension Couette low Planar Couette low Cylindrical Couette low Planer rotational Couette low Hele-Shaw low Poiseuille low Friction actor and Reynolds number
Chapter 8 Laminar Flows with Dependence on One Dimension Couette low Planar Couette low Cylindrical Couette low Planer rotational Couette low Hele-Shaw low Poiseuille low Friction actor and Reynolds number
Feature extraction: Corners and blobs
 Featre etraction: Corners and blobs Wh etract featres? Motiation: panorama stitching We hae two images how do we combine them? Wh etract featres? Motiation: panorama stitching We hae two images how do
Featre etraction: Corners and blobs Wh etract featres? Motiation: panorama stitching We hae two images how do we combine them? Wh etract featres? Motiation: panorama stitching We hae two images how do
Lesson 6: Apparent weight, Radial acceleration (sections 4:9-5.2)
") Beore we start the new material we will do another Newton s second law problem. A bloc is being pulled by a rope as shown in the picture. The coeicient o static riction is 0.7 and the coeicient o inetic
Beore we start the new material we will do another Newton s second law problem. A bloc is being pulled by a rope as shown in the picture. The coeicient o static riction is 0.7 and the coeicient o inetic
A Unied Factorization Algorithm for Points, Line Segments and. Planes with Uncertainty Models. Daniel D. Morris and Takeo Kanade
 Appeared in: ICCV '98, pp. 696-7, Bombay, India, Jan. 998 A Unied Factorization Algorithm or oints, Line Segments and lanes with Uncertainty Models Daniel D. Morris and Takeo Kanade Robotics Institute,
Appeared in: ICCV '98, pp. 696-7, Bombay, India, Jan. 998 A Unied Factorization Algorithm or oints, Line Segments and lanes with Uncertainty Models Daniel D. Morris and Takeo Kanade Robotics Institute,
MOTION IN 2-DIMENSION (Projectile & Circular motion And Vectors)
") MOTION IN -DIMENSION (Projectile & Circular motion nd Vectors) INTRODUCTION The motion of an object is called two dimensional, if two of the three co-ordinates required to specif the position of the object
MOTION IN -DIMENSION (Projectile & Circular motion nd Vectors) INTRODUCTION The motion of an object is called two dimensional, if two of the three co-ordinates required to specif the position of the object
Chapter 11 Collision Theory
 Chapter Collision Theory Introduction. Center o Mass Reerence Frame Consider two particles o masses m and m interacting ia some orce. Figure. Center o Mass o a system o two interacting particles Choose
Chapter Collision Theory Introduction. Center o Mass Reerence Frame Consider two particles o masses m and m interacting ia some orce. Figure. Center o Mass o a system o two interacting particles Choose
y2 = 0. Show that u = e2xsin(2y) satisfies Laplace's equation.
 satisfies Laplace's equation.") Review 1 1) State the largest possible domain o deinition or the unction (, ) = 3 - ) Determine the largest set o points in the -plane on which (, ) = sin-1( - ) deines a continuous unction 3) Find the
Review 1 1) State the largest possible domain o deinition or the unction (, ) = 3 - ) Determine the largest set o points in the -plane on which (, ) = sin-1( - ) deines a continuous unction 3) Find the
Tangent Line Approximations
 60_009.qd //0 :8 PM Page SECTION.9 Dierentials Section.9 EXPLORATION Tangent Line Approimation Use a graphing utilit to graph. In the same viewing window, graph the tangent line to the graph o at the point,.
60_009.qd //0 :8 PM Page SECTION.9 Dierentials Section.9 EXPLORATION Tangent Line Approimation Use a graphing utilit to graph. In the same viewing window, graph the tangent line to the graph o at the point,.
Visual Object Recognition
 Visual Object Recognition Lecture 2: Image Formation Per-Erik Forssén, docent Computer Vision Laboratory Department of Electrical Engineering Linköping University Lecture 2: Image Formation Pin-hole, and
Visual Object Recognition Lecture 2: Image Formation Per-Erik Forssén, docent Computer Vision Laboratory Department of Electrical Engineering Linköping University Lecture 2: Image Formation Pin-hole, and
Local Features (contd.)
") Motivation Local Features (contd.) Readings: Mikolajczyk and Schmid; F&P Ch 10 Feature points are used also or: Image alignment (homography, undamental matrix) 3D reconstruction Motion tracking Object
Motivation Local Features (contd.) Readings: Mikolajczyk and Schmid; F&P Ch 10 Feature points are used also or: Image alignment (homography, undamental matrix) 3D reconstruction Motion tracking Object
Image Alignment and Mosaicing Feature Tracking and the Kalman Filter
 Image Alignment and Mosaicing Feature Tracking and the Kalman Filter Image Alignment Applications Local alignment: Tracking Stereo Global alignment: Camera jitter elimination Image enhancement Panoramic
Image Alignment and Mosaicing Feature Tracking and the Kalman Filter Image Alignment Applications Local alignment: Tracking Stereo Global alignment: Camera jitter elimination Image enhancement Panoramic
DO PHYSICS ONLINE. WEB activity: Use the web to find out more about: Aristotle, Copernicus, Kepler, Galileo and Newton.
 DO PHYSICS ONLINE DISPLACEMENT VELOCITY ACCELERATION The objects that make up space are in motion, we moe, soccer balls moe, the Earth moes, electrons moe, - - -. Motion implies change. The study of the
DO PHYSICS ONLINE DISPLACEMENT VELOCITY ACCELERATION The objects that make up space are in motion, we moe, soccer balls moe, the Earth moes, electrons moe, - - -. Motion implies change. The study of the
Invariant local features. Invariant Local Features. Classes of transformations. (Good) invariant local features. Case study: panorama stitching
 invariant local features. Case study: panorama stitching") Invariant local eatures Invariant Local Features Tuesday, February 6 Subset o local eature types designed to be invariant to Scale Translation Rotation Aine transormations Illumination 1) Detect distinctive
Invariant local eatures Invariant Local Features Tuesday, February 6 Subset o local eature types designed to be invariant to Scale Translation Rotation Aine transormations Illumination 1) Detect distinctive
Dynamics ( 동역학 ) Ch.2 Motion of Translating Bodies (2.1 & 2.2)
 Ch.2 Motion of Translating Bodies (2.1 & 2.2)") Dynamics ( 동역학 ) Ch. Motion of Translating Bodies (. &.) Motion of Translating Bodies This chapter is usually referred to as Kinematics of Particles. Particles: In dynamics, a particle is a body without
Dynamics ( 동역학 ) Ch. Motion of Translating Bodies (. &.) Motion of Translating Bodies This chapter is usually referred to as Kinematics of Particles. Particles: In dynamics, a particle is a body without
Mat 241 Homework Set 7key Due Professor David Schultz
 Mat 1 Homework Set 7ke Due Proessor David Schultz Directions: Show all algebraic steps neatl and concisel using proper mathematical smbolism. When graphs and technolog are to be implemented, do so appropriatel.
Mat 1 Homework Set 7ke Due Proessor David Schultz Directions: Show all algebraic steps neatl and concisel using proper mathematical smbolism. When graphs and technolog are to be implemented, do so appropriatel.
SUBJECT:ENGINEERING MATHEMATICS-I SUBJECT CODE :SMT1101 UNIT III FUNCTIONS OF SEVERAL VARIABLES. Jacobians
 SUBJECT:ENGINEERING MATHEMATICS-I SUBJECT CODE :SMT0 UNIT III FUNCTIONS OF SEVERAL VARIABLES Jacobians Changing ariable is something e come across er oten in Integration There are man reasons or changing
SUBJECT:ENGINEERING MATHEMATICS-I SUBJECT CODE :SMT0 UNIT III FUNCTIONS OF SEVERAL VARIABLES Jacobians Changing ariable is something e come across er oten in Integration There are man reasons or changing
Relating axial motion of optical elements to focal shift
 Relating aial motion o optical elements to ocal shit Katie Schwertz and J. H. Burge College o Optical Sciences, University o Arizona, Tucson AZ 857, USA katie.schwertz@gmail.com ABSTRACT In this paper,
Relating aial motion o optical elements to ocal shit Katie Schwertz and J. H. Burge College o Optical Sciences, University o Arizona, Tucson AZ 857, USA katie.schwertz@gmail.com ABSTRACT In this paper,
Syllabus Objective: 2.9 The student will sketch the graph of a polynomial, radical, or rational function.
 Precalculus Notes: Unit Polynomial Functions Syllabus Objective:.9 The student will sketch the graph o a polynomial, radical, or rational unction. Polynomial Function: a unction that can be written in
Precalculus Notes: Unit Polynomial Functions Syllabus Objective:.9 The student will sketch the graph o a polynomial, radical, or rational unction. Polynomial Function: a unction that can be written in
a by a factor of = 294 requires 1/T, so to increase 1.4 h 294 = h
 IDENTIFY: If the centripetal acceleration matches g, no contact force is required to support an object on the spinning earth s surface. Calculate the centripetal (radial) acceleration /R using = πr/t to
IDENTIFY: If the centripetal acceleration matches g, no contact force is required to support an object on the spinning earth s surface. Calculate the centripetal (radial) acceleration /R using = πr/t to
An example of Lagrangian for a non-holonomic system
 Uniersit of North Georgia Nighthaks Open Institutional Repositor Facult Publications Department of Mathematics 9-9-05 An eample of Lagrangian for a non-holonomic sstem Piotr W. Hebda Uniersit of North
Uniersit of North Georgia Nighthaks Open Institutional Repositor Facult Publications Department of Mathematics 9-9-05 An eample of Lagrangian for a non-holonomic sstem Piotr W. Hebda Uniersit of North
EDGES AND CONTOURS(1)
") KOM31 Image Processing in Industrial Sstems Dr Muharrem Mercimek 1 EDGES AND CONTOURS1) KOM31 Image Processing in Industrial Sstems Some o the contents are adopted rom R. C. Gonzalez, R. E. Woods, Digital
KOM31 Image Processing in Industrial Sstems Dr Muharrem Mercimek 1 EDGES AND CONTOURS1) KOM31 Image Processing in Industrial Sstems Some o the contents are adopted rom R. C. Gonzalez, R. E. Woods, Digital
Chapter 3 Motion in a Plane
 Chapter 3 Motion in a Plane Introduce ectors and scalars. Vectors hae direction as well as magnitude. The are represented b arrows. The arrow points in the direction of the ector and its length is related
Chapter 3 Motion in a Plane Introduce ectors and scalars. Vectors hae direction as well as magnitude. The are represented b arrows. The arrow points in the direction of the ector and its length is related
Differential Equations
 LOCUS Dierential Equations CONCEPT NOTES 0. Motiation 0. Soling Dierential Equations LOCUS Dierential Equations Section - MOTIVATION A dierential equation can simpl be said to be an equation inoling deriaties
LOCUS Dierential Equations CONCEPT NOTES 0. Motiation 0. Soling Dierential Equations LOCUS Dierential Equations Section - MOTIVATION A dierential equation can simpl be said to be an equation inoling deriaties
III. Relative Velocity
 Adanced Kinematics I. Vector addition/subtraction II. Components III. Relatie Velocity IV. Projectile Motion V. Use of Calculus (nonuniform acceleration) VI. Parametric Equations The student will be able
Adanced Kinematics I. Vector addition/subtraction II. Components III. Relatie Velocity IV. Projectile Motion V. Use of Calculus (nonuniform acceleration) VI. Parametric Equations The student will be able
Relating axial motion of optical elements to focal shift
 Relating aial motion o optical elements to ocal shit Katie Schwertz and J. H. Burge College o Optical Sciences, University o Arizona, Tucson AZ 857, USA katie.schwertz@gmail.com ABSTRACT In this paper,
Relating aial motion o optical elements to ocal shit Katie Schwertz and J. H. Burge College o Optical Sciences, University o Arizona, Tucson AZ 857, USA katie.schwertz@gmail.com ABSTRACT In this paper,
Camera calibration. Outline. Pinhole camera. Camera projection models. Nonlinear least square methods A camera calibration tool
 Outline Camera calibration Camera projection models Camera calibration i Nonlinear least square methods A camera calibration tool Applications Digital Visual Effects Yung-Yu Chuang with slides b Richard
Outline Camera calibration Camera projection models Camera calibration i Nonlinear least square methods A camera calibration tool Applications Digital Visual Effects Yung-Yu Chuang with slides b Richard
Example: When describing where a function is increasing, decreasing or constant we use the x- axis values.
 Business Calculus Lecture Notes (also Calculus With Applications or Business Math II) Chapter 3 Applications o Derivatives 31 Increasing and Decreasing Functions Inormal Deinition: A unction is increasing
Business Calculus Lecture Notes (also Calculus With Applications or Business Math II) Chapter 3 Applications o Derivatives 31 Increasing and Decreasing Functions Inormal Deinition: A unction is increasing
Lecture 13: Tracking mo3on features op3cal flow
 Lecture 13: Tracking mo3on features op3cal flow Professor Fei- Fei Li Stanford Vision Lab Lecture 14-1! What we will learn today? Introduc3on Op3cal flow Feature tracking Applica3ons Reading: [Szeliski]
Lecture 13: Tracking mo3on features op3cal flow Professor Fei- Fei Li Stanford Vision Lab Lecture 14-1! What we will learn today? Introduc3on Op3cal flow Feature tracking Applica3ons Reading: [Szeliski]
Interest Operators. All lectures are from posted research papers. Harris Corner Detector: the first and most basic interest operator
 Interest Operators All lectures are from posted research papers. Harris Corner Detector: the first and most basic interest operator SIFT interest point detector and region descriptor Kadir Entrop Detector
Interest Operators All lectures are from posted research papers. Harris Corner Detector: the first and most basic interest operator SIFT interest point detector and region descriptor Kadir Entrop Detector
New Functions from Old Functions
 .3 New Functions rom Old Functions In this section we start with the basic unctions we discussed in Section. and obtain new unctions b shiting, stretching, and relecting their graphs. We also show how
.3 New Functions rom Old Functions In this section we start with the basic unctions we discussed in Section. and obtain new unctions b shiting, stretching, and relecting their graphs. We also show how
MATRIX TRANSFORMATIONS
 CHAPTER 5. MATRIX TRANSFORMATIONS INSTITIÚID TEICNEOLAÍOCHTA CHEATHARLACH INSTITUTE OF TECHNOLOGY CARLOW MATRIX TRANSFORMATIONS Matri Transformations Definition Let A and B be sets. A function f : A B
CHAPTER 5. MATRIX TRANSFORMATIONS INSTITIÚID TEICNEOLAÍOCHTA CHEATHARLACH INSTITUTE OF TECHNOLOGY CARLOW MATRIX TRANSFORMATIONS Matri Transformations Definition Let A and B be sets. A function f : A B
Space Coordinates and Vectors in Space. Coordinates in Space
 0_110.qd 11//0 : PM Page 77 SECTION 11. Space Coordinates and Vectors in Space 77 -plane Section 11. -plane -plane The three-dimensional coordinate sstem Figure 11.1 Space Coordinates and Vectors in Space
0_110.qd 11//0 : PM Page 77 SECTION 11. Space Coordinates and Vectors in Space 77 -plane Section 11. -plane -plane The three-dimensional coordinate sstem Figure 11.1 Space Coordinates and Vectors in Space
DYNAMICS. Kinematics of Particles Engineering Dynamics Lecture Note VECTOR MECHANICS FOR ENGINEERS: Eighth Edition CHAPTER
 27 The McGraw-Hill Companies, Inc. All rights resered. Eighth E CHAPTER 11 VECTOR MECHANICS FOR ENGINEERS: DYNAMICS Ferdinand P. Beer E. Russell Johnston, Jr. Kinematics of Particles Lecture Notes: J.
27 The McGraw-Hill Companies, Inc. All rights resered. Eighth E CHAPTER 11 VECTOR MECHANICS FOR ENGINEERS: DYNAMICS Ferdinand P. Beer E. Russell Johnston, Jr. Kinematics of Particles Lecture Notes: J.
Lab on Taylor Polynomials. This Lab is accompanied by an Answer Sheet that you are to complete and turn in to your instructor.
 Lab on Taylor Polynomials This Lab is accompanied by an Answer Sheet that you are to complete and turn in to your instructor. In this Lab we will approimate complicated unctions by simple unctions. The
Lab on Taylor Polynomials This Lab is accompanied by an Answer Sheet that you are to complete and turn in to your instructor. In this Lab we will approimate complicated unctions by simple unctions. The
CISE-301: Numerical Methods Topic 1:
 CISE-3: Numerical Methods Topic : Introduction to Numerical Methods and Taylor Series Lectures -4: KFUPM Term 9 Section 8 CISE3_Topic KFUPM - T9 - Section 8 Lecture Introduction to Numerical Methods What
CISE-3: Numerical Methods Topic : Introduction to Numerical Methods and Taylor Series Lectures -4: KFUPM Term 9 Section 8 CISE3_Topic KFUPM - T9 - Section 8 Lecture Introduction to Numerical Methods What
1. Interference condition. 2. Dispersion A B. As shown in Figure 1, the path difference between interfering rays AB and A B is a(sin
 asic equations or astronomical spectroscopy with a diraction grating Jeremy Allington-Smith, University o Durham, 3 Feb 000 (Copyright Jeremy Allington-Smith, 000). Intererence condition As shown in Figure,
asic equations or astronomical spectroscopy with a diraction grating Jeremy Allington-Smith, University o Durham, 3 Feb 000 (Copyright Jeremy Allington-Smith, 000). Intererence condition As shown in Figure,
Elaborazione delle Immagini Informazione multimediale - Immagini. Raffaella Lanzarotti
 Elaborazione delle Immagini Informazione multimediale - Immagini Raffaella Lanzarotti OPTICAL FLOW Thanks to prof. Mubarak Shah,UCF 2 Video Video: sequence of frames (images) catch in the time Data: function
Elaborazione delle Immagini Informazione multimediale - Immagini Raffaella Lanzarotti OPTICAL FLOW Thanks to prof. Mubarak Shah,UCF 2 Video Video: sequence of frames (images) catch in the time Data: function
CAP 5415 Computer Vision
 CAP 545 Computer Vision Dr. Mubarak Sa Univ. o Central Florida Filtering Lecture-2 Contents Filtering/Smooting/Removing Noise Convolution/Correlation Image Derivatives Histogram Some Matlab Functions General
CAP 545 Computer Vision Dr. Mubarak Sa Univ. o Central Florida Filtering Lecture-2 Contents Filtering/Smooting/Removing Noise Convolution/Correlation Image Derivatives Histogram Some Matlab Functions General
Quadratic Functions. The graph of the function shifts right 3. The graph of the function shifts left 3.
 Quadratic Functions The translation o a unction is simpl the shiting o a unction. In this section, or the most part, we will be graphing various unctions b means o shiting the parent unction. We will go
Quadratic Functions The translation o a unction is simpl the shiting o a unction. In this section, or the most part, we will be graphing various unctions b means o shiting the parent unction. We will go
Math 20C. Lecture Examples.
 Math 20C. Lecture Eamples. (8//08) Section 2.. Vectors in the plane Definition A ector represents a nonnegatie number and, if the number is not zero, a direction. The number associated ith the ector is
Math 20C. Lecture Eamples. (8//08) Section 2.. Vectors in the plane Definition A ector represents a nonnegatie number and, if the number is not zero, a direction. The number associated ith the ector is
Mathematical Preliminaries. Developed for the Members of Azera Global By: Joseph D. Fournier B.Sc.E.E., M.Sc.E.E.
 Mathematical Preliminaries Developed or the Members o Azera Global B: Joseph D. Fournier B.Sc.E.E., M.Sc.E.E. Outline Chapter One, Sets: Slides: 3-27 Chapter Two, Introduction to unctions: Slides: 28-36
Mathematical Preliminaries Developed or the Members o Azera Global B: Joseph D. Fournier B.Sc.E.E., M.Sc.E.E. Outline Chapter One, Sets: Slides: 3-27 Chapter Two, Introduction to unctions: Slides: 28-36
6.1 The Linear Elastic Model
 Linear lasticit The simplest constitutive law or solid materials is the linear elastic law, which assumes a linear relationship between stress and engineering strain. This assumption turns out to be an
Linear lasticit The simplest constitutive law or solid materials is the linear elastic law, which assumes a linear relationship between stress and engineering strain. This assumption turns out to be an
3. Several Random Variables
 . Several Random Variables. Two Random Variables. Conditional Probabilit--Revisited. Statistical Independence.4 Correlation between Random Variables. Densit unction o the Sum o Two Random Variables. Probabilit
. Several Random Variables. Two Random Variables. Conditional Probabilit--Revisited. Statistical Independence.4 Correlation between Random Variables. Densit unction o the Sum o Two Random Variables. Probabilit
TFY4102 Exam Fall 2015
 FY40 Eam Fall 05 Short answer (4 points each) ) Bernoulli's equation relating luid low and pressure is based on a) conservation o momentum b) conservation o energy c) conservation o mass along the low
FY40 Eam Fall 05 Short answer (4 points each) ) Bernoulli's equation relating luid low and pressure is based on a) conservation o momentum b) conservation o energy c) conservation o mass along the low
Instance-level l recognition. Cordelia Schmid INRIA
 nstance-level l recognition Cordelia Schmid NRA nstance-level recognition Particular objects and scenes large databases Application Search photos on the web for particular places Find these landmars...in
nstance-level l recognition Cordelia Schmid NRA nstance-level recognition Particular objects and scenes large databases Application Search photos on the web for particular places Find these landmars...in
TRACKING and DETECTION in COMPUTER VISION
 Technischen Universität München Winter Semester 2013/2014 TRACKING and DETECTION in COMPUTER VISION Template tracking methods Slobodan Ilić Template based-tracking Energy-based methods The Lucas-Kanade(LK)
Technischen Universität München Winter Semester 2013/2014 TRACKING and DETECTION in COMPUTER VISION Template tracking methods Slobodan Ilić Template based-tracking Energy-based methods The Lucas-Kanade(LK)
Introduction to motion correspondence
 Introduction to motion correspondence 1 IPAM - UCLA July 24, 2013 Iasonas Kokkinos Center for Visual Computing Ecole Centrale Paris / INRIA Saclay Why estimate visual motion? 2 Tracking Segmentation Structure
Introduction to motion correspondence 1 IPAM - UCLA July 24, 2013 Iasonas Kokkinos Center for Visual Computing Ecole Centrale Paris / INRIA Saclay Why estimate visual motion? 2 Tracking Segmentation Structure
Section 6: PRISMATIC BEAMS. Beam Theory
 Beam Theory There are two types of beam theory aailable to craft beam element formulations from. They are Bernoulli-Euler beam theory Timoshenko beam theory One learns the details of Bernoulli-Euler beam
Beam Theory There are two types of beam theory aailable to craft beam element formulations from. They are Bernoulli-Euler beam theory Timoshenko beam theory One learns the details of Bernoulli-Euler beam
CSE 252B: Computer Vision II
 CSE 252B: Computer Vision II Lecturer: Serge Belongie Scribe: Hamed Masnadi Shirazi, Solmaz Alipour LECTURE 5 Relationships between the Homography and the Essential Matrix 5.1. Introduction In practice,
CSE 252B: Computer Vision II Lecturer: Serge Belongie Scribe: Hamed Masnadi Shirazi, Solmaz Alipour LECTURE 5 Relationships between the Homography and the Essential Matrix 5.1. Introduction In practice,
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil nfrastructure Eng. & Mgmt. Session 9- mage Detectors, Part Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering Lab e-mail:
CEE598 - Visual Sensing for Civil nfrastructure Eng. & Mgmt. Session 9- mage Detectors, Part Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering Lab e-mail:
Flip-Flop Functions KEY
 For each rational unction, list the zeros o the polynomials in the numerator and denominator. Then, using a calculator, sketch the graph in a window o [-5.75, 6] by [-5, 5], and provide an end behavior
For each rational unction, list the zeros o the polynomials in the numerator and denominator. Then, using a calculator, sketch the graph in a window o [-5.75, 6] by [-5, 5], and provide an end behavior
Objectives. By the time the student is finished with this section of the workbook, he/she should be able
 FUNCTIONS Quadratic Functions......8 Absolute Value Functions.....48 Translations o Functions..57 Radical Functions...61 Eponential Functions...7 Logarithmic Functions......8 Cubic Functions......91 Piece-Wise
FUNCTIONS Quadratic Functions......8 Absolute Value Functions.....48 Translations o Functions..57 Radical Functions...61 Eponential Functions...7 Logarithmic Functions......8 Cubic Functions......91 Piece-Wise
Interest Point Detection. Lecture-4
 nterest Point Detection Lectre-4 Contents Harris Corner Detector Sm o Sqares Dierences (SSD Corrleation Talor Series Eigen Vectors and Eigen Vales nariance and co-ariance What is an interest point Epressie
nterest Point Detection Lectre-4 Contents Harris Corner Detector Sm o Sqares Dierences (SSD Corrleation Talor Series Eigen Vectors and Eigen Vales nariance and co-ariance What is an interest point Epressie
Chapter 2 Section 3. Partial Derivatives
 Chapter Section 3 Partial Derivatives Deinition. Let be a unction o two variables and. The partial derivative o with respect to is the unction, denoted b D1 1 such that its value at an point (,) in the
Chapter Section 3 Partial Derivatives Deinition. Let be a unction o two variables and. The partial derivative o with respect to is the unction, denoted b D1 1 such that its value at an point (,) in the
Wavelets bases in higher dimensions
 Wavelets bases in higher dimensions 1 Topics Basic issues Separable spaces and bases Separable wavelet bases D DWT Fast D DWT Lifting steps scheme JPEG000 Advanced concepts Overcomplete bases Discrete
Wavelets bases in higher dimensions 1 Topics Basic issues Separable spaces and bases Separable wavelet bases D DWT Fast D DWT Lifting steps scheme JPEG000 Advanced concepts Overcomplete bases Discrete
( x) f = where P and Q are polynomials.
 f = where P and Q are polynomials.") 9.8 Graphing Rational Functions Lets begin with a deinition. Deinition: Rational Function A rational unction is a unction o the orm ( ) ( ) ( ) P where P and Q are polynomials. Q An eample o a simple rational
9.8 Graphing Rational Functions Lets begin with a deinition. Deinition: Rational Function A rational unction is a unction o the orm ( ) ( ) ( ) P where P and Q are polynomials. Q An eample o a simple rational
Chapter 8: MULTIPLE CONTINUOUS RANDOM VARIABLES
 Charles Boncelet Probabilit Statistics and Random Signals" Oord Uniersit Press 06. ISBN: 978-0-9-0005-0 Chapter 8: MULTIPLE CONTINUOUS RANDOM VARIABLES Sections 8. Joint Densities and Distribution unctions
Charles Boncelet Probabilit Statistics and Random Signals" Oord Uniersit Press 06. ISBN: 978-0-9-0005-0 Chapter 8: MULTIPLE CONTINUOUS RANDOM VARIABLES Sections 8. Joint Densities and Distribution unctions
Fluid Physics 8.292J/12.330J
 Fluid Phsics 8.292J/12.0J Problem Set 4 Solutions 1. Consider the problem of a two-dimensional (infinitel long) airplane wing traeling in the negatie x direction at a speed c through an Euler fluid. In
Fluid Phsics 8.292J/12.0J Problem Set 4 Solutions 1. Consider the problem of a two-dimensional (infinitel long) airplane wing traeling in the negatie x direction at a speed c through an Euler fluid. In
Time Series Analysis for Quality Improvement: a Soft Computing Approach
 ESANN'4 proceedings - European Smposium on Artiicial Neural Networks Bruges (Belgium), 8-3 April 4, d-side publi., ISBN -9337-4-8, pp. 19-114 ime Series Analsis or Qualit Improvement: a Sot Computing Approach
ESANN'4 proceedings - European Smposium on Artiicial Neural Networks Bruges (Belgium), 8-3 April 4, d-side publi., ISBN -9337-4-8, pp. 19-114 ime Series Analsis or Qualit Improvement: a Sot Computing Approach
Clicker questions. Clicker question 2. Clicker Question 1. Clicker question 2. Clicker question 1. the answers are in the lower right corner
 licker questions the answers are in the lower right corner question wave on a string goes rom a thin string to a thick string. What picture best represents the wave some time ater hitting the boundary?
licker questions the answers are in the lower right corner question wave on a string goes rom a thin string to a thick string. What picture best represents the wave some time ater hitting the boundary?
EVALUATE: If the angle 40 is replaces by (cable B is vertical), then T = mg and
, then T = mg and") 58 IDENTIY: ppl Newton s 1st law to the wrecing ball Each cable eerts a force on the ball, directed along the cable SET UP: The force diagram for the wrecing ball is setched in igure 58 (a) T cos 40 mg
58 IDENTIY: ppl Newton s 1st law to the wrecing ball Each cable eerts a force on the ball, directed along the cable SET UP: The force diagram for the wrecing ball is setched in igure 58 (a) T cos 40 mg
MATRIX REPRESENTATIONS OF THE COORDINATES OF THE ATOMS OF THE MOLECULES OF H 2 O AND NH 3 IN OPERATIONS OF SYMMETRY
 Trakia Journal of Sciences No 4 pp 9-96 7 opyright 7 Trakia Uniersity Aailable online at: http://www.uni-s.bg ISSN -769 (print) ISSN -55 (online) doi:.5547/tjs.7.4. Original ontribution MATRIX REPRESENTATIONS
Trakia Journal of Sciences No 4 pp 9-96 7 opyright 7 Trakia Uniersity Aailable online at: http://www.uni-s.bg ISSN -769 (print) ISSN -55 (online) doi:.5547/tjs.7.4. Original ontribution MATRIX REPRESENTATIONS
2) If a=<2,-1> and b=<3,2>, what is a b and what is the angle between the vectors?
 If a=<2,-1> and b=<3,2>, what is a b and what is the angle between the vectors?") CMCS427 Dot product reiew Computing the dot product The dot product can be computed ia a) Cosine rule a b = a b cos q b) Coordinate-wise a b = ax * bx + ay * by 1) If a b, a and b all equal 1, what s the
CMCS427 Dot product reiew Computing the dot product The dot product can be computed ia a) Cosine rule a b = a b cos q b) Coordinate-wise a b = ax * bx + ay * by 1) If a b, a and b all equal 1, what s the
VECTORS IN THREE DIMENSIONS
 1 CHAPTER 2. BASIC TRIGONOMETRY 1 INSTITIÚID TEICNEOLAÍOCHTA CHEATHARLACH INSTITUTE OF TECHNOLOGY CARLOW VECTORS IN THREE DIMENSIONS 1 Vectors in Two Dimensions A vector is an object which has magnitude
1 CHAPTER 2. BASIC TRIGONOMETRY 1 INSTITIÚID TEICNEOLAÍOCHTA CHEATHARLACH INSTITUTE OF TECHNOLOGY CARLOW VECTORS IN THREE DIMENSIONS 1 Vectors in Two Dimensions A vector is an object which has magnitude
Wave Motion A wave is a self-propagating disturbance in a medium. Waves carry energy, momentum, information, but not matter.
 wae-1 Wae Motion A wae is a self-propagating disturbance in a medium. Waes carr energ, momentum, information, but not matter. Eamples: Sound waes (pressure waes) in air (or in an gas or solid or liquid)
wae-1 Wae Motion A wae is a self-propagating disturbance in a medium. Waes carr energ, momentum, information, but not matter. Eamples: Sound waes (pressure waes) in air (or in an gas or solid or liquid)
Instance-level recognition: Local invariant features. Cordelia Schmid INRIA, Grenoble
 nstance-level recognition: ocal invariant features Cordelia Schmid NRA Grenoble Overview ntroduction to local features Harris interest t points + SSD ZNCC SFT Scale & affine invariant interest point detectors
nstance-level recognition: ocal invariant features Cordelia Schmid NRA Grenoble Overview ntroduction to local features Harris interest t points + SSD ZNCC SFT Scale & affine invariant interest point detectors
Mat 267 Engineering Calculus III Updated on 9/19/2010
 Chapter 11 Partial Derivatives Section 11.1 Functions o Several Variables Deinition: A unction o two variables is a rule that assigns to each ordered pair o real numbers (, ) in a set D a unique real number
Chapter 11 Partial Derivatives Section 11.1 Functions o Several Variables Deinition: A unction o two variables is a rule that assigns to each ordered pair o real numbers (, ) in a set D a unique real number
z-axis SUBMITTED BY: Ms. Harjeet Kaur Associate Professor Department of Mathematics PGGCG 11, Chandigarh y-axis x-axis
 z-ais - - SUBMITTED BY: - -ais - - - - - - -ais Ms. Harjeet Kaur Associate Proessor Department o Mathematics PGGCG Chandigarh CONTENTS: Function o two variables: Deinition Domain Geometrical illustration
z-ais - - SUBMITTED BY: - -ais - - - - - - -ais Ms. Harjeet Kaur Associate Proessor Department o Mathematics PGGCG Chandigarh CONTENTS: Function o two variables: Deinition Domain Geometrical illustration
Gaussian Plane Waves Plane waves have flat emag field in x,y Tend to get distorted by diffraction into spherical plane waves and Gaussian Spherical
 Gauian Plane Wave Plane ave have lat ema ield in x,y Tend to et ditorted by diraction into pherical plane ave and Gauian Spherical Wave E ield intenity ollo: U ( ) x y u( x, y,r,t ) exp i ω t Kr R R here
Gauian Plane Wave Plane ave have lat ema ield in x,y Tend to et ditorted by diraction into pherical plane ave and Gauian Spherical Wave E ield intenity ollo: U ( ) x y u( x, y,r,t ) exp i ω t Kr R R here
Doppler shifts in astronomy
 7.4 Doppler shift 253 Diide the transformation (3.4) by as follows: = g 1 bck. (Lorentz transformation) (7.43) Eliminate in the right-hand term with (41) and then inoke (42) to yield = g (1 b cos u). (7.44)
7.4 Doppler shift 253 Diide the transformation (3.4) by as follows: = g 1 bck. (Lorentz transformation) (7.43) Eliminate in the right-hand term with (41) and then inoke (42) to yield = g (1 b cos u). (7.44)
Polynomials, Linear Factors, and Zeros. Factor theorem, multiple zero, multiplicity, relative maximum, relative minimum
 Polynomials, Linear Factors, and Zeros To analyze the actored orm o a polynomial. To write a polynomial unction rom its zeros. Describe the relationship among solutions, zeros, - intercept, and actors.
Polynomials, Linear Factors, and Zeros To analyze the actored orm o a polynomial. To write a polynomial unction rom its zeros. Describe the relationship among solutions, zeros, - intercept, and actors.
Optical Flow, Motion Segmentation, Feature Tracking
 BIL 719 - Computer Vision May 21, 2014 Optical Flow, Motion Segmentation, Feature Tracking Aykut Erdem Dept. of Computer Engineering Hacettepe University Motion Optical Flow Motion Segmentation Feature
BIL 719 - Computer Vision May 21, 2014 Optical Flow, Motion Segmentation, Feature Tracking Aykut Erdem Dept. of Computer Engineering Hacettepe University Motion Optical Flow Motion Segmentation Feature
Chapter 6 Momentum Transfer in an External Laminar Boundary Layer
 6. Similarit Soltions Chapter 6 Momentm Transfer in an Eternal Laminar Bondar Laer Consider a laminar incompressible bondar laer with constant properties. Assme the flow is stead and two-dimensional aligned
6. Similarit Soltions Chapter 6 Momentm Transfer in an Eternal Laminar Bondar Laer Consider a laminar incompressible bondar laer with constant properties. Assme the flow is stead and two-dimensional aligned
UNDERSTAND MOTION IN ONE AND TWO DIMENSIONS
 SUBAREA I. COMPETENCY 1.0 UNDERSTAND MOTION IN ONE AND TWO DIMENSIONS MECHANICS Skill 1.1 Calculating displacement, aerage elocity, instantaneous elocity, and acceleration in a gien frame of reference
SUBAREA I. COMPETENCY 1.0 UNDERSTAND MOTION IN ONE AND TWO DIMENSIONS MECHANICS Skill 1.1 Calculating displacement, aerage elocity, instantaneous elocity, and acceleration in a gien frame of reference