Instance-level recognition: Local invariant features. Cordelia Schmid INRIA, Grenoble
|
|
|
- Mervin Cummings
- 6 years ago
- Views:
Transcription
1 nstance-level recognition: ocal invariant features Cordelia Schmid NRA Grenoble
2 Overview ntroduction to local features Harris interest t points + SSD ZNCC SFT Scale & affine invariant interest point detectors
3 ocal features local descriptor Several / man local descriptors per image Robust to occlusion/clutter + no object segmentation required Photometric : distinctive nvariant : to image transformations + illumination changes







4 ocal features nterest Points Contours/lines Region segments
5 ocal features nterest Points Contours/lines Region segments Patch descriptors i.e. SFT Mi-points angles Color/teture histogram


6 nterest points / invariant regions Harris detector Scale/affine inv. detector presented in this lecture



![UC Berele] Structured forests for](/docs-images/79/79572177/images/7-3.jpg "fast edge detection SED [Dollar and")
7 Contours / lines Etraction de contours Zero crossing of aplacian ocal maima of gradients Chain contour points hsteresis Cann detector Recent detectors Global probabilit of boundar gpb detector [Mali et al. UC Berele] Structured forests for fast edge detection SED [Dollar and Zitnic] student presentation
8 Regions segments / superpiels Simple linear iterative clustering SC Normalized cut [Shi & Mali] Mean Shift [Comaniciu & Meer].







9 Application: matching Find corresponding locations in the image
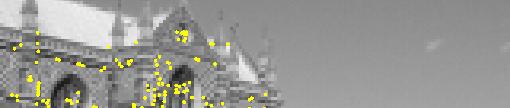


10 llustration Matching nterest t points etracted t with Harris detector t ~ 500 points
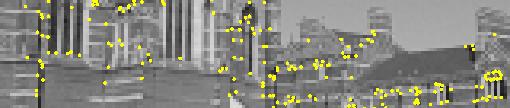
11 llustration Matching Matching nterest t points matched based on cross-correlation 188 pairs





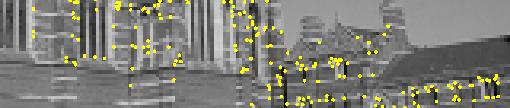
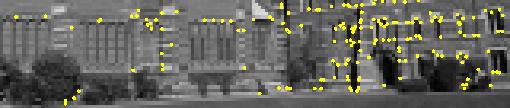
12 llustration Global constraints Matching Global constraint - Robust estimation of the fundamental matri 99 inliers 89 outliers






13 Application: Panorama stitching mages courtes of A. Zisserman.








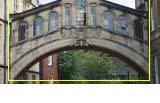
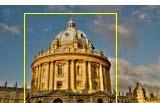
14 Application: nstance-level recognition Search for particular objects and scenes in large databases
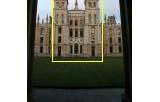
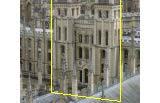



15 Difficulties Finding the object despite possibl large changes in scale viewpoint lighting and partial occlusion requires invariant description Scale Viewpoint ighting Occlusion
16 Difficulties Ver large images collection need for efficient i indeing i Flicr has billion photographs h more than 1 million added d dail Faceboo has 15 billion images ~7 million added dail arge personal collections Video collections i.e. YouTube
17 Applications Search photos on the web for particular places Find these landmars...in these images and 1M more
18 Applications Tae a picture of a product or advertisement find relevant information on the web
19 Applications Cop detection for images and videos Quer video Search in 00h of video
20 Overview ntroduction to local features Harris interest t points + SSD ZNCC SFT Scale & affine invariant interest point detectors
21 Harris detector [Harris & Stephens 88] Based on the idea of auto-correlation ti mportant t difference in all directions => interest t point
22 Harris detector Auto-correlation function for a point and a shift A W W
23 Harris detector Auto-correlation function for a point and a shift A W A { W small in all directions uniform region { large in one directions contour large in all directions interest point
24 Harris detector Harris detector Discret shifts are avoided based on the auto-correlation matri with first order approimation A W W W
25 Harris detector Harris detector W W W W W W Auto-correlation matri the sum can be smoothed with a Gaussian the sum can be smoothed with a Gaussian G
26 Harris detector Auto-correlation matri A G captures the structure of the local neighborhood measure based on eigenvalues of this matri strong eigenvalues => interest point 1 strong eigenvalue => contour 0 eigenvalue => uniform region
27 nterpreting the eigenvalues Classification of image points using eigenvalues of autocorrelation matri: Edge >> 1 Corner 1 and are large 1 ~ ; \ 1 and are small; Flat region Edge 1 >> 1
28 R Corner response function det A trace A α: constant 0.04 to 0.06 Edge R <0 1 1 Corner R > 0 Flat region R small Edge R < 0
29 Harris detector Cornerness function R det A trace A 1 1 Reduces the effect of a strong contour nterest point detection Treshold absolut relatif number of corners ocal maima f thresh 8 neighbourhood f f
30 Harris Detector: Steps
31 Compute corner response R Harris Detector: Steps
32 Harris Detector: Steps Find points with large corner response: R>threshold
33 Harris Detector: Steps Tae onl the points of local maima of R
34 Harris Detector: Steps
35 Harris detector: Summar of steps 1. Compute Gaussian derivatives at each piel. Compute second moment matri A in a Gaussian window around each piel 3. Compute corner response function R 4. Threshold R 5. Find local maima of response function non-maimum suppression
36 Harris - invariance to transformations Geometric transformations translation rotation similitude ilit rotation ti + scale change affine valid for local planar objects Photometric transformations Affine intensit changes a + b
37 Harris Detector: nvariance Properties Rotation Ellipse rotates but its shape i.e. eigenvalues remains the same Corner response R is invariant to image rotation
38 Harris Detector: nvariance Properties Scaling Corner All points will be classified as edges Not invariant to scaling
39 Harris Detector: nvariance Properties Affine intensit change Onl derivatives are used => invariance to intensit shift + b ntensit scale: a R threshold R image coordinate image coordinate ffi i i h Partiall invariant to affine intensit change dependent on tpe of threshold
40 Comparison of patches - SSD Comparison of the intensities in the neighborhood of two interest points 1 1 image 1 image SSD : sum of square difference 1 i j i j N 1 N N i N jn Small difference values similar patches
41 Cross-correlation ZNCC Cross correlation ZNCC ZNCC: zero normalized cross correlation m j i m j i N N N 1 1 N i N j N ZNCC values between 1 and 1 1 when identical patches ZNCC values between -1 and 1 1 when identical patches in practice threshold around 0.5 Robust to illumination change -> a+b
42 ocal descriptors Piel values Grevalue derivatives Differential invariants i [Koenderin 87] SFT descriptor [owe 99]
43 ocal descriptors ocal descriptors Grevalue derivatives G e a ue de at es Convolution with Gaussian derivatives G G * * * G G G v * * G G d d G G ep 1 G
44 ocal descriptors ocal descriptors Notation for grevalue derivatives [Koenderin 87] G Notation for grevalue derivatives [Koenderin 87] * G G * * G G v * G i? nvariance?
45 ocal descriptors rotation invariance ocal descriptors rotation invariance i t i t ti diff ti l i i t nvariance to image rotation : differential invariants [Koen87] gradient magnitude aplacian

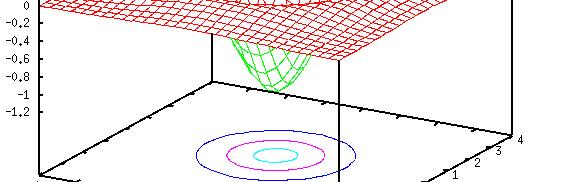
46 aplacian of Gaussian OG OG G G
47 SFT descriptor [owe 99] Approach 8 orientations of the gradient 44 spatial grid Dimension 18 soft-assignment to spatial bins normalization of the descriptor to norm one comparison with Euclidean distance image patch gradient 3D histogram




48 ocal descriptors - rotation invariance Estimation of the dominant orientation ti etract gradient orientation histogram over gradient orientation pea in this histogram 0 Rotate patch in dominant direction
49 ocal descriptors illumination change Robustness to illumination changes in case of an affine transformation 1 a b Normalization of the image patch with mean and variance
50 nvariance to scale changes nvariance to scale changes Scale change between two images Scale change between two images Scale factor s can be eliminated Support region for calculation!! n case of a convolution with Gaussian derivatives defined b n case of a convolution with Gaussian derivatives defined b d d G G ep 1 G d d G G
51 Overview ntroduction to local features Harris interest t points + SSD ZNCC SFT Scale & affine invariant interest point detectors
52 Scale invariance - motivation Description regions have to be adapted to scale changes nterest t points have to be repeatable for scale changes


53 Harris detector + scale changes Repeatabilit rate { ai bi dist H ai b R ma a b i i i }
54 Scale adaptation Scale adaptation Scale change bet een t o images Scale change between two images s s Scale adapted derivative calculation
55 Scale adaptation Scale adaptation Scale change bet een t o images Scale change between two images s s Scale adapted derivative calculation s G s G n n i i n i i s n s

56 Harris detector adaptation to scale R { a b dist H a b } i i i i
57 Scale selection For a point compute a value gradient aplacian etc. at several scales Normalization ation of the values with the scale factor e.g. aplacian s Select scale s at the maimum characteristic scale s scale Ep. results show that t the aplacian gives best results
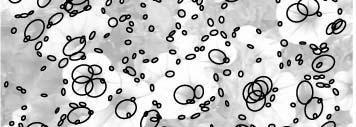
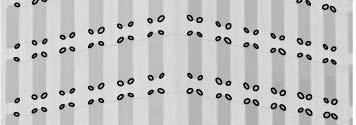
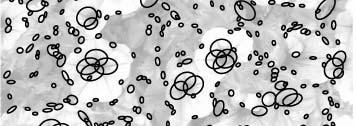
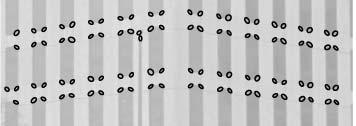
58 Scale selection Scale invariance of the characteristic scale s norm. ap. scale
59 Scale selection Scale invariance of the characteristic scale s norm. a p. norm. a p. scale scale Relation between characteristic scales s s 1 s




60 Scale-invariant detectors Harris-aplace Miolajcz & Schmid 01 aplacian detector indeberg 98 Difference of Gaussian owe 99 Harris-aplace aplacian
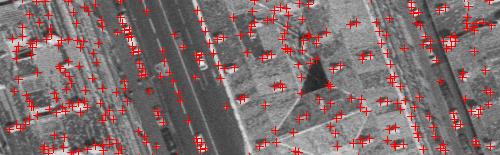
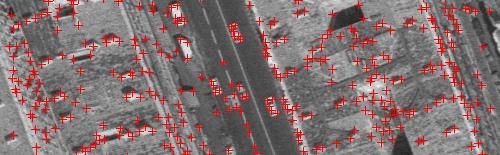
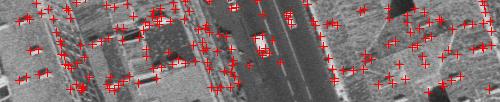
61 Harris-aplace multi-scale Harris points selection of points at maimum of aplacian invariant points + associated regions [Miolajcz & Schmid 01]
62 Matching results 13 / 190 detected interest points
63 Matching results 58 points are initiall matched
64 Matching results 3 points are matched after verification all correct

65 OG detector Convolve image with scalenormalized aplacian at several scales OG s G G Detection of maima and minima of aplacian in scale space

66 Efficient implementation Difference of Gaussian DOG approimates the aplacian DOG G G Error due to the approimation




67 DOG detector Fast computation scale space processed one octave at a time David G. owe. "Distinctive image features from scale-invariant epoints. JCV 60 student presentation
68 Affine invariant regions - Motivation Scale invariance is not sufficient for large baseline changes detected scale invariant region A j t d i i i t h l ll projected regions viewpoint changes can locall be approimated b an affine transformation A


69 Affine invariant regions - Motivation




70 Affine invariant regions - Eample
71 Harris/Hessian/aplacian-Affine nitialize with scale-invariant Harris/Hessian/aplacian points Estimation of the affine neighbourhood with the second moment matri [indeberg 94] Appl affine neighbourhood estimation to the scale- invariant interest points [Miolajcz & Schmid 0 Schmid0 Schaffalitz & Zisserman 0] Ecellent results in a comparison [Miolajcz et al. 05]
72 Affine invariant regions Affine invariant regions Based on the second moment matri indeberg 94 Based on the second moment matri indeberg 94 D D G M D D D D D D G M Normalization with eigenvalues/eigenvectors 1 M
73 Affine invariant regions A R M 1 R M 1 R R R R sotropic neighborhoods related b image rotation
74 Affine invariant regions - Estimation terative estimation initial points
75 Affine invariant regions - Estimation terative estimation iteration #1
76 Affine invariant regions - Estimation terative estimation iteration #


77 Harris-Affine versus Harris-aplace Harris-Affine Harris-aplace

78 Harris/Hessian-Affine Harris-Affine Hessian-Affine





79 Harris-Affine





80 Hessian-Affine








81 Matches correct matches




82 Matches 33 correct matches
83 Maimall stable etremal regions MSER [Matas 0] Etremal regions: connected components in a thresholded image all piels above/below a threshold Maimall stable: minimal change of the component area for a change of the threshold i.e. region remains stable for a change of threshold Ecellent results in a recent comparison
84 Maimall stable etremal regions MSER Eamples of thresholded h d images high threshold low threshold






85 MSER
Instance-level l recognition. Cordelia Schmid INRIA
 nstance-level l recognition Cordelia Schmid NRA nstance-level recognition Particular objects and scenes large databases Application Search photos on the web for particular places Find these landmars...in
nstance-level l recognition Cordelia Schmid NRA nstance-level recognition Particular objects and scenes large databases Application Search photos on the web for particular places Find these landmars...in
Instance-level l recognition. Cordelia Schmid & Josef Sivic INRIA
 nstance-level l recognition Cordelia Schmid & Josef Sivic NRA nstance-level recognition Particular objects and scenes large databases Application Search photos on the web for particular places Find these
nstance-level l recognition Cordelia Schmid & Josef Sivic NRA nstance-level recognition Particular objects and scenes large databases Application Search photos on the web for particular places Find these
Instance-level recognition: Local invariant features. Cordelia Schmid INRIA, Grenoble
 nstance-level recognition: ocal invariant features Cordelia Schmid NRA Grenoble Overview ntroduction to local features Harris interest points + SSD ZNCC SFT Scale & affine invariant interest point detectors
nstance-level recognition: ocal invariant features Cordelia Schmid NRA Grenoble Overview ntroduction to local features Harris interest points + SSD ZNCC SFT Scale & affine invariant interest point detectors
Instance-level recognition: Local invariant features. Cordelia Schmid INRIA, Grenoble
 nstance-level recognition: ocal invariant features Cordelia Schmid NRA Grenoble Overview ntroduction to local features Harris interest points + SSD ZNCC SFT Scale & affine invariant interest point detectors
nstance-level recognition: ocal invariant features Cordelia Schmid NRA Grenoble Overview ntroduction to local features Harris interest points + SSD ZNCC SFT Scale & affine invariant interest point detectors
Keypoint extraction: Corners Harris Corners Pkwy, Charlotte, NC
 Kepoint etraction: Corners 9300 Harris Corners Pkw Charlotte NC Wh etract kepoints? Motivation: panorama stitching We have two images how do we combine them? Wh etract kepoints? Motivation: panorama stitching
Kepoint etraction: Corners 9300 Harris Corners Pkw Charlotte NC Wh etract kepoints? Motivation: panorama stitching We have two images how do we combine them? Wh etract kepoints? Motivation: panorama stitching
Overview. Introduction to local features. Harris interest points + SSD, ZNCC, SIFT. Evaluation and comparison of different detectors
 Overview Introduction to local features Harris interest points + SSD, ZNCC, SIFT Scale & affine invariant interest point detectors Evaluation and comparison of different detectors Region descriptors and
Overview Introduction to local features Harris interest points + SSD, ZNCC, SIFT Scale & affine invariant interest point detectors Evaluation and comparison of different detectors Region descriptors and
Overview. Harris interest points. Comparing interest points (SSD, ZNCC, SIFT) Scale & affine invariant interest points
 Scale & affine invariant interest points") Overview Harris interest points Comparing interest points (SSD, ZNCC, SIFT) Scale & affine invariant interest points Evaluation and comparison of different detectors Region descriptors and their performance
Overview Harris interest points Comparing interest points (SSD, ZNCC, SIFT) Scale & affine invariant interest points Evaluation and comparison of different detectors Region descriptors and their performance
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil nfrastructure Eng. & Mgmt. Session 9- mage Detectors, Part Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering Lab e-mail:
CEE598 - Visual Sensing for Civil nfrastructure Eng. & Mgmt. Session 9- mage Detectors, Part Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering Lab e-mail:
Overview. Introduction to local features. Harris interest points + SSD, ZNCC, SIFT. Evaluation and comparison of different detectors
 Overview Introduction to local features Harris interest points + SSD, ZNCC, SIFT Scale & affine invariant interest point detectors Evaluation and comparison of different detectors Region descriptors and
Overview Introduction to local features Harris interest points + SSD, ZNCC, SIFT Scale & affine invariant interest point detectors Evaluation and comparison of different detectors Region descriptors and
Lecture 05 Point Feature Detection and Matching
 nstitute of nformatics nstitute of Neuroinformatics Lecture 05 Point Feature Detection and Matching Davide Scaramuzza 1 Lab Eercise 3 - Toda afternoon Room ETH HG E 1.1 from 13:15 to 15:00 Wor description:
nstitute of nformatics nstitute of Neuroinformatics Lecture 05 Point Feature Detection and Matching Davide Scaramuzza 1 Lab Eercise 3 - Toda afternoon Room ETH HG E 1.1 from 13:15 to 15:00 Wor description:
Interest Operators. All lectures are from posted research papers. Harris Corner Detector: the first and most basic interest operator
 Interest Operators All lectures are from posted research papers. Harris Corner Detector: the first and most basic interest operator SIFT interest point detector and region descriptor Kadir Entrop Detector
Interest Operators All lectures are from posted research papers. Harris Corner Detector: the first and most basic interest operator SIFT interest point detector and region descriptor Kadir Entrop Detector
Recap: edge detection. Source: D. Lowe, L. Fei-Fei
 Recap: edge detection Source: D. Lowe, L. Fei-Fei Canny edge detector 1. Filter image with x, y derivatives of Gaussian 2. Find magnitude and orientation of gradient 3. Non-maximum suppression: Thin multi-pixel
Recap: edge detection Source: D. Lowe, L. Fei-Fei Canny edge detector 1. Filter image with x, y derivatives of Gaussian 2. Find magnitude and orientation of gradient 3. Non-maximum suppression: Thin multi-pixel
Perception III: Filtering, Edges, and Point-features
 Perception : Filtering, Edges, and Point-features Davide Scaramuzza Universit of Zurich Margarita Chli, Paul Furgale, Marco Hutter, Roland Siegwart 1 Toda s outline mage filtering Smoothing Edge detection
Perception : Filtering, Edges, and Point-features Davide Scaramuzza Universit of Zurich Margarita Chli, Paul Furgale, Marco Hutter, Roland Siegwart 1 Toda s outline mage filtering Smoothing Edge detection
6.869 Advances in Computer Vision. Prof. Bill Freeman March 1, 2005
 6.869 Advances in Computer Vision Prof. Bill Freeman March 1 2005 1 2 Local Features Matching points across images important for: object identification instance recognition object class recognition pose
6.869 Advances in Computer Vision Prof. Bill Freeman March 1 2005 1 2 Local Features Matching points across images important for: object identification instance recognition object class recognition pose
Feature extraction: Corners and blobs
 Featre etraction: Corners and blobs Wh etract featres? Motiation: panorama stitching We hae two images how do we combine them? Wh etract featres? Motiation: panorama stitching We hae two images how do
Featre etraction: Corners and blobs Wh etract featres? Motiation: panorama stitching We hae two images how do we combine them? Wh etract featres? Motiation: panorama stitching We hae two images how do
Feature extraction: Corners and blobs
 Feature extraction: Corners and blobs Review: Linear filtering and edge detection Name two different kinds of image noise Name a non-linear smoothing filter What advantages does median filtering have over
Feature extraction: Corners and blobs Review: Linear filtering and edge detection Name two different kinds of image noise Name a non-linear smoothing filter What advantages does median filtering have over
Corners, Blobs & Descriptors. With slides from S. Lazebnik & S. Seitz, D. Lowe, A. Efros
 Corners, Blobs & Descriptors With slides from S. Lazebnik & S. Seitz, D. Lowe, A. Efros Motivation: Build a Panorama M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 How do we build panorama?
Corners, Blobs & Descriptors With slides from S. Lazebnik & S. Seitz, D. Lowe, A. Efros Motivation: Build a Panorama M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 How do we build panorama?
INTEREST POINTS AT DIFFERENT SCALES
 INTEREST POINTS AT DIFFERENT SCALES Thank you for the slides. They come mostly from the following sources. Dan Huttenlocher Cornell U David Lowe U. of British Columbia Martial Hebert CMU Intuitively, junctions
INTEREST POINTS AT DIFFERENT SCALES Thank you for the slides. They come mostly from the following sources. Dan Huttenlocher Cornell U David Lowe U. of British Columbia Martial Hebert CMU Intuitively, junctions
Edges and Scale. Image Features. Detecting edges. Origin of Edges. Solution: smooth first. Effects of noise
 Edges and Scale Image Features From Sandlot Science Slides revised from S. Seitz, R. Szeliski, S. Lazebnik, etc. Origin of Edges surface normal discontinuity depth discontinuity surface color discontinuity
Edges and Scale Image Features From Sandlot Science Slides revised from S. Seitz, R. Szeliski, S. Lazebnik, etc. Origin of Edges surface normal discontinuity depth discontinuity surface color discontinuity
Lecture 8: Interest Point Detection. Saad J Bedros
 #1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Last Lecture : Edge Detection Preprocessing of image is desired to eliminate or at least minimize noise effects There is always tradeoff
#1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Last Lecture : Edge Detection Preprocessing of image is desired to eliminate or at least minimize noise effects There is always tradeoff
Lecture 8: Interest Point Detection. Saad J Bedros
 #1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Review of Edge Detectors #2 Today s Lecture Interest Points Detection What do we mean with Interest Point Detection in an Image Goal:
#1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Review of Edge Detectors #2 Today s Lecture Interest Points Detection What do we mean with Interest Point Detection in an Image Goal:
Advances in Computer Vision. Prof. Bill Freeman. Image and shape descriptors. Readings: Mikolajczyk and Schmid; Belongie et al.
 6.869 Advances in Computer Vision Prof. Bill Freeman March 3, 2005 Image and shape descriptors Affine invariant features Comparison of feature descriptors Shape context Readings: Mikolajczyk and Schmid;
6.869 Advances in Computer Vision Prof. Bill Freeman March 3, 2005 Image and shape descriptors Affine invariant features Comparison of feature descriptors Shape context Readings: Mikolajczyk and Schmid;
Feature detectors and descriptors. Fei-Fei Li
 Feature detectors and descriptors Fei-Fei Li Feature Detection e.g. DoG detected points (~300) coordinates, neighbourhoods Feature Description e.g. SIFT local descriptors (invariant) vectors database of
Feature detectors and descriptors Fei-Fei Li Feature Detection e.g. DoG detected points (~300) coordinates, neighbourhoods Feature Description e.g. SIFT local descriptors (invariant) vectors database of
Feature detectors and descriptors. Fei-Fei Li
 Feature detectors and descriptors Fei-Fei Li Feature Detection e.g. DoG detected points (~300) coordinates, neighbourhoods Feature Description e.g. SIFT local descriptors (invariant) vectors database of
Feature detectors and descriptors Fei-Fei Li Feature Detection e.g. DoG detected points (~300) coordinates, neighbourhoods Feature Description e.g. SIFT local descriptors (invariant) vectors database of
Image Processing 1 (IP1) Bildverarbeitung 1
 Bildverarbeitung 1") MIN-Fakultät Fachbereich Informatik Arbeitsbereich SAV/BV KOGS Image Processing 1 IP1 Bildverarbeitung 1 Lecture : Object Recognition Winter Semester 015/16 Slides: Prof. Bernd Neumann Slightly revised
MIN-Fakultät Fachbereich Informatik Arbeitsbereich SAV/BV KOGS Image Processing 1 IP1 Bildverarbeitung 1 Lecture : Object Recognition Winter Semester 015/16 Slides: Prof. Bernd Neumann Slightly revised
Image Analysis. Feature extraction: corners and blobs
 Image Analysis Feature extraction: corners and blobs Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Svetlana Lazebnik, University of North Carolina at Chapel Hill (http://www.cs.unc.edu/~lazebnik/spring10/).
Image Analysis Feature extraction: corners and blobs Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Svetlana Lazebnik, University of North Carolina at Chapel Hill (http://www.cs.unc.edu/~lazebnik/spring10/).
Detectors part II Descriptors
 EECS 442 Computer vision Detectors part II Descriptors Blob detectors Invariance Descriptors Some slides of this lectures are courtesy of prof F. Li, prof S. Lazebnik, and various other lecturers Goal:
EECS 442 Computer vision Detectors part II Descriptors Blob detectors Invariance Descriptors Some slides of this lectures are courtesy of prof F. Li, prof S. Lazebnik, and various other lecturers Goal:
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely Lecture 5: Feature descriptors and matching Szeliski: 4.1 Reading Announcements Project 1 Artifacts due tomorrow, Friday 2/17, at 11:59pm Project 2 will be released
CS5670: Computer Vision Noah Snavely Lecture 5: Feature descriptors and matching Szeliski: 4.1 Reading Announcements Project 1 Artifacts due tomorrow, Friday 2/17, at 11:59pm Project 2 will be released
Scale & Affine Invariant Interest Point Detectors
 Scale & Affine Invariant Interest Point Detectors Krystian Mikolajczyk and Cordelia Schmid Presented by Hunter Brown & Gaurav Pandey, February 19, 2009 Roadmap: Motivation Scale Invariant Detector Affine
Scale & Affine Invariant Interest Point Detectors Krystian Mikolajczyk and Cordelia Schmid Presented by Hunter Brown & Gaurav Pandey, February 19, 2009 Roadmap: Motivation Scale Invariant Detector Affine
Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems
 Robots for People --- A project for intelligent integrated systems") 1 Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems V. Estivill-Castro 2 Perception Concepts Vision Chapter 4 (textbook) Sections 4.3 to 4.5 What is the course
1 Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems V. Estivill-Castro 2 Perception Concepts Vision Chapter 4 (textbook) Sections 4.3 to 4.5 What is the course
Lecture 12. Local Feature Detection. Matching with Invariant Features. Why extract features? Why extract features? Why extract features?
 Lecture 1 Why extract eatures? Motivation: panorama stitching We have two images how do we combine them? Local Feature Detection Guest lecturer: Alex Berg Reading: Harris and Stephens David Lowe IJCV We
Lecture 1 Why extract eatures? Motivation: panorama stitching We have two images how do we combine them? Local Feature Detection Guest lecturer: Alex Berg Reading: Harris and Stephens David Lowe IJCV We
* h + = Lec 05: Interesting Points Detection. Image Analysis & Retrieval. Outline. Image Filtering. Recap of Lec 04 Image Filtering Edge Features
 age Analsis & Retrieval Outline CS/EE 5590 Special Topics (Class ds: 44873, 44874) Fall 06, M/W 4-5:5p@Bloch 00 Lec 05: nteresting Points Detection Recap of Lec 04 age Filtering Edge Features Hoework Harris
age Analsis & Retrieval Outline CS/EE 5590 Special Topics (Class ds: 44873, 44874) Fall 06, M/W 4-5:5p@Bloch 00 Lec 05: nteresting Points Detection Recap of Lec 04 age Filtering Edge Features Hoework Harris
SURF Features. Jacky Baltes Dept. of Computer Science University of Manitoba WWW:
 SURF Features Jacky Baltes Dept. of Computer Science University of Manitoba Email: jacky@cs.umanitoba.ca WWW: http://www.cs.umanitoba.ca/~jacky Salient Spatial Features Trying to find interest points Points
SURF Features Jacky Baltes Dept. of Computer Science University of Manitoba Email: jacky@cs.umanitoba.ca WWW: http://www.cs.umanitoba.ca/~jacky Salient Spatial Features Trying to find interest points Points
SIFT keypoint detection. D. Lowe, Distinctive image features from scale-invariant keypoints, IJCV 60 (2), pp , 2004.
, pp , 2004.") SIFT keypoint detection D. Lowe, Distinctive image features from scale-invariant keypoints, IJCV 60 (), pp. 91-110, 004. Keypoint detection with scale selection We want to extract keypoints with characteristic
SIFT keypoint detection D. Lowe, Distinctive image features from scale-invariant keypoints, IJCV 60 (), pp. 91-110, 004. Keypoint detection with scale selection We want to extract keypoints with characteristic
Motion estimation. Digital Visual Effects Yung-Yu Chuang. with slides by Michael Black and P. Anandan
 Motion estimation Digital Visual Effects Yung-Yu Chuang with slides b Michael Black and P. Anandan Motion estimation Parametric motion image alignment Tracking Optical flow Parametric motion direct method
Motion estimation Digital Visual Effects Yung-Yu Chuang with slides b Michael Black and P. Anandan Motion estimation Parametric motion image alignment Tracking Optical flow Parametric motion direct method
Extract useful building blocks: blobs. the same image like for the corners
 Extract useful building blocks: blobs the same image like for the corners Here were the corners... Blob detection in 2D Laplacian of Gaussian: Circularly symmetric operator for blob detection in 2D 2 g=
Extract useful building blocks: blobs the same image like for the corners Here were the corners... Blob detection in 2D Laplacian of Gaussian: Circularly symmetric operator for blob detection in 2D 2 g=
CS4670: Computer Vision Kavita Bala. Lecture 7: Harris Corner Detec=on
 CS4670: Computer Vision Kavita Bala Lecture 7: Harris Corner Detec=on Announcements HW 1 will be out soon Sign up for demo slots for PA 1 Remember that both partners have to be there We will ask you to
CS4670: Computer Vision Kavita Bala Lecture 7: Harris Corner Detec=on Announcements HW 1 will be out soon Sign up for demo slots for PA 1 Remember that both partners have to be there We will ask you to
Optical flow. Subhransu Maji. CMPSCI 670: Computer Vision. October 20, 2016
 Optical flow Subhransu Maji CMPSC 670: Computer Vision October 20, 2016 Visual motion Man slides adapted from S. Seitz, R. Szeliski, M. Pollefes CMPSC 670 2 Motion and perceptual organization Sometimes,
Optical flow Subhransu Maji CMPSC 670: Computer Vision October 20, 2016 Visual motion Man slides adapted from S. Seitz, R. Szeliski, M. Pollefes CMPSC 670 2 Motion and perceptual organization Sometimes,
Blob Detection CSC 767
 Blob Detection CSC 767 Blob detection Slides: S. Lazebnik Feature detection with scale selection We want to extract features with characteristic scale that is covariant with the image transformation Blob
Blob Detection CSC 767 Blob detection Slides: S. Lazebnik Feature detection with scale selection We want to extract features with characteristic scale that is covariant with the image transformation Blob
SIFT: SCALE INVARIANT FEATURE TRANSFORM BY DAVID LOWE
 SIFT: SCALE INVARIANT FEATURE TRANSFORM BY DAVID LOWE Overview Motivation of Work Overview of Algorithm Scale Space and Difference of Gaussian Keypoint Localization Orientation Assignment Descriptor Building
SIFT: SCALE INVARIANT FEATURE TRANSFORM BY DAVID LOWE Overview Motivation of Work Overview of Algorithm Scale Space and Difference of Gaussian Keypoint Localization Orientation Assignment Descriptor Building
Blobs & Scale Invariance
 Blobs & Scale Invariance Prof. Didier Stricker Doz. Gabriele Bleser Computer Vision: Object and People Tracking With slides from Bebis, S. Lazebnik & S. Seitz, D. Lowe, A. Efros 1 Apertizer: some videos
Blobs & Scale Invariance Prof. Didier Stricker Doz. Gabriele Bleser Computer Vision: Object and People Tracking With slides from Bebis, S. Lazebnik & S. Seitz, D. Lowe, A. Efros 1 Apertizer: some videos
SIFT: Scale Invariant Feature Transform
 1 SIFT: Scale Invariant Feature Transform With slides from Sebastian Thrun Stanford CS223B Computer Vision, Winter 2006 3 Pattern Recognition Want to find in here SIFT Invariances: Scaling Rotation Illumination
1 SIFT: Scale Invariant Feature Transform With slides from Sebastian Thrun Stanford CS223B Computer Vision, Winter 2006 3 Pattern Recognition Want to find in here SIFT Invariances: Scaling Rotation Illumination
Invariant local features. Invariant Local Features. Classes of transformations. (Good) invariant local features. Case study: panorama stitching
 invariant local features. Case study: panorama stitching") Invariant local eatures Invariant Local Features Tuesday, February 6 Subset o local eature types designed to be invariant to Scale Translation Rotation Aine transormations Illumination 1) Detect distinctive
Invariant local eatures Invariant Local Features Tuesday, February 6 Subset o local eature types designed to be invariant to Scale Translation Rotation Aine transormations Illumination 1) Detect distinctive
Corner detection: the basic idea
 Corner detection: the basic idea At a corner, shifting a window in any direction should give a large change in intensity flat region: no change in all directions edge : no change along the edge direction
Corner detection: the basic idea At a corner, shifting a window in any direction should give a large change in intensity flat region: no change in all directions edge : no change along the edge direction
CSE 473/573 Computer Vision and Image Processing (CVIP)
") CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Lecture 11 Local Features 1 Schedule Last class We started local features Today More on local features Readings for
CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Lecture 11 Local Features 1 Schedule Last class We started local features Today More on local features Readings for
Properties of detectors Edge detectors Harris DoG Properties of descriptors SIFT HOG Shape context
 Lecture 10 Detectors and descriptors Properties of detectors Edge detectors Harris DoG Properties of descriptors SIFT HOG Shape context Silvio Savarese Lecture 10-16-Feb-15 From the 3D to 2D & vice versa
Lecture 10 Detectors and descriptors Properties of detectors Edge detectors Harris DoG Properties of descriptors SIFT HOG Shape context Silvio Savarese Lecture 10-16-Feb-15 From the 3D to 2D & vice versa
LoG Blob Finding and Scale. Scale Selection. Blobs (and scale selection) Achieving scale covariance. Blob detection in 2D. Blob detection in 2D
 Achieving scale covariance. Blob detection in 2D. Blob detection in 2D") Achieving scale covariance Blobs (and scale selection) Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region
Achieving scale covariance Blobs (and scale selection) Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region
Advanced Features. Advanced Features: Topics. Jana Kosecka. Slides from: S. Thurn, D. Lowe, Forsyth and Ponce. Advanced features and feature matching
 Advanced Features Jana Kosecka Slides from: S. Thurn, D. Lowe, Forsyth and Ponce Advanced Features: Topics Advanced features and feature matching Template matching SIFT features Haar features 2 1 Features
Advanced Features Jana Kosecka Slides from: S. Thurn, D. Lowe, Forsyth and Ponce Advanced Features: Topics Advanced features and feature matching Template matching SIFT features Haar features 2 1 Features
CS 3710: Visual Recognition Describing Images with Features. Adriana Kovashka Department of Computer Science January 8, 2015
 CS 3710: Visual Recognition Describing Images with Features Adriana Kovashka Department of Computer Science January 8, 2015 Plan for Today Presentation assignments + schedule changes Image filtering Feature
CS 3710: Visual Recognition Describing Images with Features Adriana Kovashka Department of Computer Science January 8, 2015 Plan for Today Presentation assignments + schedule changes Image filtering Feature
Achieving scale covariance
 Achieving scale covariance Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region size that is covariant
Achieving scale covariance Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region size that is covariant
Scale & Affine Invariant Interest Point Detectors
 Scale & Affine Invariant Interest Point Detectors KRYSTIAN MIKOLAJCZYK AND CORDELIA SCHMID [2004] Shreyas Saxena Gurkirit Singh 23/11/2012 Introduction We are interested in finding interest points. What
Scale & Affine Invariant Interest Point Detectors KRYSTIAN MIKOLAJCZYK AND CORDELIA SCHMID [2004] Shreyas Saxena Gurkirit Singh 23/11/2012 Introduction We are interested in finding interest points. What
Harris Corner Detector
 Multimedia Computing: Algorithms, Systems, and Applications: Feature Extraction By Dr. Yu Cao Department of Computer Science The University of Massachusetts Lowell Lowell, MA 01854, USA Part of the slides
Multimedia Computing: Algorithms, Systems, and Applications: Feature Extraction By Dr. Yu Cao Department of Computer Science The University of Massachusetts Lowell Lowell, MA 01854, USA Part of the slides
Image matching. by Diva Sian. by swashford
 Image matching by Diva Sian by swashford Harder case by Diva Sian by scgbt Invariant local features Find features that are invariant to transformations geometric invariance: translation, rotation, scale
Image matching by Diva Sian by swashford Harder case by Diva Sian by scgbt Invariant local features Find features that are invariant to transformations geometric invariance: translation, rotation, scale
Maximally Stable Local Description for Scale Selection
 Maximally Stable Local Description for Scale Selection Gyuri Dorkó and Cordelia Schmid INRIA Rhône-Alpes, 655 Avenue de l Europe, 38334 Montbonnot, France {gyuri.dorko,cordelia.schmid}@inrialpes.fr Abstract.
Maximally Stable Local Description for Scale Selection Gyuri Dorkó and Cordelia Schmid INRIA Rhône-Alpes, 655 Avenue de l Europe, 38334 Montbonnot, France {gyuri.dorko,cordelia.schmid}@inrialpes.fr Abstract.
Wavelet-based Salient Points with Scale Information for Classification
 Wavelet-based Salient Points with Scale Information for Classification Alexandra Teynor and Hans Burkhardt Department of Computer Science, Albert-Ludwigs-Universität Freiburg, Germany {teynor, Hans.Burkhardt}@informatik.uni-freiburg.de
Wavelet-based Salient Points with Scale Information for Classification Alexandra Teynor and Hans Burkhardt Department of Computer Science, Albert-Ludwigs-Universität Freiburg, Germany {teynor, Hans.Burkhardt}@informatik.uni-freiburg.de
Local Features (contd.)
") Motivation Local Features (contd.) Readings: Mikolajczyk and Schmid; F&P Ch 10 Feature points are used also or: Image alignment (homography, undamental matrix) 3D reconstruction Motion tracking Object
Motivation Local Features (contd.) Readings: Mikolajczyk and Schmid; F&P Ch 10 Feature points are used also or: Image alignment (homography, undamental matrix) 3D reconstruction Motion tracking Object
Camera calibration. Outline. Pinhole camera. Camera projection models. Nonlinear least square methods A camera calibration tool
 Outline Camera calibration Camera projection models Camera calibration i Nonlinear least square methods A camera calibration tool Applications Digital Visual Effects Yung-Yu Chuang with slides b Richard
Outline Camera calibration Camera projection models Camera calibration i Nonlinear least square methods A camera calibration tool Applications Digital Visual Effects Yung-Yu Chuang with slides b Richard
INF Introduction to classifiction Anne Solberg Based on Chapter 2 ( ) in Duda and Hart: Pattern Classification
 in Duda and Hart: Pattern Classification") INF 4300 151014 Introduction to classifiction Anne Solberg anne@ifiuiono Based on Chapter 1-6 in Duda and Hart: Pattern Classification 151014 INF 4300 1 Introduction to classification One of the most challenging
INF 4300 151014 Introduction to classifiction Anne Solberg anne@ifiuiono Based on Chapter 1-6 in Duda and Hart: Pattern Classification 151014 INF 4300 1 Introduction to classification One of the most challenging
Lecture 7: Finding Features (part 2/2)
") Lecture 7: Finding Features (part 2/2) Professor Fei- Fei Li Stanford Vision Lab Lecture 7 -! 1 What we will learn today? Local invariant features MoHvaHon Requirements, invariances Keypoint localizahon
Lecture 7: Finding Features (part 2/2) Professor Fei- Fei Li Stanford Vision Lab Lecture 7 -! 1 What we will learn today? Local invariant features MoHvaHon Requirements, invariances Keypoint localizahon
Edge Detection. CS 650: Computer Vision
 CS 650: Computer Vision Edges and Gradients Edge: local indication of an object transition Edge detection: local operators that find edges (usually involves convolution) Local intensity transitions are
CS 650: Computer Vision Edges and Gradients Edge: local indication of an object transition Edge detection: local operators that find edges (usually involves convolution) Local intensity transitions are
INF Anne Solberg One of the most challenging topics in image analysis is recognizing a specific object in an image.
 INF 4300 700 Introduction to classifiction Anne Solberg anne@ifiuiono Based on Chapter -6 6inDuda and Hart: attern Classification 303 INF 4300 Introduction to classification One of the most challenging
INF 4300 700 Introduction to classifiction Anne Solberg anne@ifiuiono Based on Chapter -6 6inDuda and Hart: attern Classification 303 INF 4300 Introduction to classification One of the most challenging
Edge Detection. Image Processing - Computer Vision
 Image Processing - Lesson 10 Edge Detection Image Processing - Computer Vision Low Level Edge detection masks Gradient Detectors Compass Detectors Second Derivative - Laplace detectors Edge Linking Image
Image Processing - Lesson 10 Edge Detection Image Processing - Computer Vision Low Level Edge detection masks Gradient Detectors Compass Detectors Second Derivative - Laplace detectors Edge Linking Image
Scale-space image processing
 Scale-space image processing Corresponding image features can appear at different scales Like shift-invariance, scale-invariance of image processing algorithms is often desirable. Scale-space representation
Scale-space image processing Corresponding image features can appear at different scales Like shift-invariance, scale-invariance of image processing algorithms is often desirable. Scale-space representation
INF Introduction to classifiction Anne Solberg
 INF 4300 8.09.17 Introduction to classifiction Anne Solberg anne@ifi.uio.no Introduction to classification Based on handout from Pattern Recognition b Theodoridis, available after the lecture INF 4300
INF 4300 8.09.17 Introduction to classifiction Anne Solberg anne@ifi.uio.no Introduction to classification Based on handout from Pattern Recognition b Theodoridis, available after the lecture INF 4300
The state of the art and beyond
 Feature Detectors and Descriptors The state of the art and beyond Local covariant detectors and descriptors have been successful in many applications Registration Stereo vision Motion estimation Matching
Feature Detectors and Descriptors The state of the art and beyond Local covariant detectors and descriptors have been successful in many applications Registration Stereo vision Motion estimation Matching
EE 6882 Visual Search Engine
 EE 6882 Visual Search Engine Prof. Shih Fu Chang, Feb. 13 th 2012 Lecture #4 Local Feature Matching Bag of Word image representation: coding and pooling (Many slides from A. Efors, W. Freeman, C. Kambhamettu,
EE 6882 Visual Search Engine Prof. Shih Fu Chang, Feb. 13 th 2012 Lecture #4 Local Feature Matching Bag of Word image representation: coding and pooling (Many slides from A. Efors, W. Freeman, C. Kambhamettu,
Lecture 7: Finding Features (part 2/2)
") Lecture 7: Finding Features (part 2/2) Dr. Juan Carlos Niebles Stanford AI Lab Professor Fei- Fei Li Stanford Vision Lab 1 What we will learn today? Local invariant features MoPvaPon Requirements, invariances
Lecture 7: Finding Features (part 2/2) Dr. Juan Carlos Niebles Stanford AI Lab Professor Fei- Fei Li Stanford Vision Lab 1 What we will learn today? Local invariant features MoPvaPon Requirements, invariances
Affine Adaptation of Local Image Features Using the Hessian Matrix
 29 Advanced Video and Signal Based Surveillance Affine Adaptation of Local Image Features Using the Hessian Matrix Ruan Lakemond, Clinton Fookes, Sridha Sridharan Image and Video Research Laboratory Queensland
29 Advanced Video and Signal Based Surveillance Affine Adaptation of Local Image Features Using the Hessian Matrix Ruan Lakemond, Clinton Fookes, Sridha Sridharan Image and Video Research Laboratory Queensland
Computer Vision I. Announcements
 Announcements Motion II No class Wednesda (Happ Thanksgiving) HW4 will be due Frida 1/8 Comment on Non-maximal supression CSE5A Lecture 15 Shi-Tomasi Corner Detector Filter image with a Gaussian. Compute
Announcements Motion II No class Wednesda (Happ Thanksgiving) HW4 will be due Frida 1/8 Comment on Non-maximal supression CSE5A Lecture 15 Shi-Tomasi Corner Detector Filter image with a Gaussian. Compute
Interest Point Detection. Lecture-4
 nterest Point Detection Lectre-4 Contents Harris Corner Detector Sm o Sqares Dierences (SSD Corrleation Talor Series Eigen Vectors and Eigen Vales nariance and co-ariance What is an interest point Epressie
nterest Point Detection Lectre-4 Contents Harris Corner Detector Sm o Sqares Dierences (SSD Corrleation Talor Series Eigen Vectors and Eigen Vales nariance and co-ariance What is an interest point Epressie
1.5. Analyzing Graphs of Functions. The Graph of a Function. What you should learn. Why you should learn it. 54 Chapter 1 Functions and Their Graphs
 0_005.qd /7/05 8: AM Page 5 5 Chapter Functions and Their Graphs.5 Analzing Graphs of Functions What ou should learn Use the Vertical Line Test for functions. Find the zeros of functions. Determine intervals
0_005.qd /7/05 8: AM Page 5 5 Chapter Functions and Their Graphs.5 Analzing Graphs of Functions What ou should learn Use the Vertical Line Test for functions. Find the zeros of functions. Determine intervals
Functions of Several Variables
 Chapter 1 Functions of Several Variables 1.1 Introduction A real valued function of n variables is a function f : R, where the domain is a subset of R n. So: for each ( 1,,..., n ) in, the value of f is
Chapter 1 Functions of Several Variables 1.1 Introduction A real valued function of n variables is a function f : R, where the domain is a subset of R n. So: for each ( 1,,..., n ) in, the value of f is
Multiscale Autoconvolution Histograms for Affine Invariant Pattern Recognition
 Multiscale Autoconvolution Histograms for Affine Invariant Pattern Recognition Esa Rahtu Mikko Salo Janne Heikkilä Department of Electrical and Information Engineering P.O. Box 4500, 90014 University of
Multiscale Autoconvolution Histograms for Affine Invariant Pattern Recognition Esa Rahtu Mikko Salo Janne Heikkilä Department of Electrical and Information Engineering P.O. Box 4500, 90014 University of
Face detection and recognition. Detection Recognition Sally
 Face detection and recognition Detection Recognition Sally Face detection & recognition Viola & Jones detector Available in open CV Face recognition Eigenfaces for face recognition Metric learning identification
Face detection and recognition Detection Recognition Sally Face detection & recognition Viola & Jones detector Available in open CV Face recognition Eigenfaces for face recognition Metric learning identification
An Improved Harris-Affine Invariant Interest Point Detector
 An Improved Harris-Affine Invariant Interest Point Detector KARINA PEREZ-DANIE, ENRIQUE ESCAMIA, MARIKO NAKANO, HECTOR PEREZ-MEANA Mechanical and Electrical Engineering School Instituto Politecnico Nacional
An Improved Harris-Affine Invariant Interest Point Detector KARINA PEREZ-DANIE, ENRIQUE ESCAMIA, MARIKO NAKANO, HECTOR PEREZ-MEANA Mechanical and Electrical Engineering School Instituto Politecnico Nacional
arxiv: v1 [cs.cv] 10 Feb 2016
![arxiv: v1 [cs.cv] 10 Feb 2016](/thumbs/76/73522588.jpg "arxiv: v1 [cs.cv] 10 Feb 2016") GABOR WAVELETS IN IMAGE PROCESSING David Bařina Doctoral Degree Programme (2), FIT BUT E-mail: xbarin2@stud.fit.vutbr.cz Supervised by: Pavel Zemčík E-mail: zemcik@fit.vutbr.cz arxiv:162.338v1 [cs.cv]
GABOR WAVELETS IN IMAGE PROCESSING David Bařina Doctoral Degree Programme (2), FIT BUT E-mail: xbarin2@stud.fit.vutbr.cz Supervised by: Pavel Zemčík E-mail: zemcik@fit.vutbr.cz arxiv:162.338v1 [cs.cv]
Lecture 6: Finding Features (part 1/2)
") Lecture 6: Finding Features (part 1/2) Professor Fei- Fei Li Stanford Vision Lab Lecture 6 -! 1 What we will learn today? Local invariant features MoHvaHon Requirements, invariances Keypoint localizahon
Lecture 6: Finding Features (part 1/2) Professor Fei- Fei Li Stanford Vision Lab Lecture 6 -! 1 What we will learn today? Local invariant features MoHvaHon Requirements, invariances Keypoint localizahon
Lecture 6: Edge Detection. CAP 5415: Computer Vision Fall 2008
 Lecture 6: Edge Detection CAP 5415: Computer Vision Fall 2008 Announcements PS 2 is available Please read it by Thursday During Thursday lecture, I will be going over it in some detail Monday - Computer
Lecture 6: Edge Detection CAP 5415: Computer Vision Fall 2008 Announcements PS 2 is available Please read it by Thursday During Thursday lecture, I will be going over it in some detail Monday - Computer
A New Shape Adaptation Scheme to Affine Invariant Detector
 KSII ANSACIONS ON INENE AND INFOMAION SYSEMS VO. 4, NO. 6, December 2010 1253 Copyright c 2010 KSII A New Shape Adaptation Scheme to Affine Invariant Detector Congxin iu, Jie Yang, Yue Zhou and Deying
KSII ANSACIONS ON INENE AND INFOMAION SYSEMS VO. 4, NO. 6, December 2010 1253 Copyright c 2010 KSII A New Shape Adaptation Scheme to Affine Invariant Detector Congxin iu, Jie Yang, Yue Zhou and Deying
Given a feature in I 1, how to find the best match in I 2?
 Feature Matching 1 Feature matching Given a feature in I 1, how to find the best match in I 2? 1. Define distance function that compares two descriptors 2. Test all the features in I 2, find the one with
Feature Matching 1 Feature matching Given a feature in I 1, how to find the best match in I 2? 1. Define distance function that compares two descriptors 2. Test all the features in I 2, find the one with
Feature Extraction and Image Processing
 Feature Extraction and Image Processing Second edition Mark S. Nixon Alberto S. Aguado :*авш JBK IIP AMSTERDAM BOSTON HEIDELBERG LONDON NEW YORK OXFORD PARIS SAN DIEGO SAN FRANCISCO SINGAPORE SYDNEY TOKYO
Feature Extraction and Image Processing Second edition Mark S. Nixon Alberto S. Aguado :*авш JBK IIP AMSTERDAM BOSTON HEIDELBERG LONDON NEW YORK OXFORD PARIS SAN DIEGO SAN FRANCISCO SINGAPORE SYDNEY TOKYO
Speech and Language Processing
 Speech and Language Processing Lecture 5 Neural network based acoustic and language models Information and Communications Engineering Course Takahiro Shinoaki 08//6 Lecture Plan (Shinoaki s part) I gives
Speech and Language Processing Lecture 5 Neural network based acoustic and language models Information and Communications Engineering Course Takahiro Shinoaki 08//6 Lecture Plan (Shinoaki s part) I gives
SURVEY OF APPEARANCE-BASED METHODS FOR OBJECT RECOGNITION
 SURVEY OF APPEARANCE-BASED METHODS FOR OBJECT RECOGNITION Peter M. Roth and Martin Winter Inst. for Computer Graphics and Vision Graz University of Technology, Austria Technical Report ICG TR 01/08 Graz,
SURVEY OF APPEARANCE-BASED METHODS FOR OBJECT RECOGNITION Peter M. Roth and Martin Winter Inst. for Computer Graphics and Vision Graz University of Technology, Austria Technical Report ICG TR 01/08 Graz,
Orientation Map Based Palmprint Recognition
 Orientation Map Based Palmprint Recognition (BM) 45 Orientation Map Based Palmprint Recognition B. H. Shekar, N. Harivinod bhshekar@gmail.com, harivinodn@gmail.com India, Mangalore University, Department
Orientation Map Based Palmprint Recognition (BM) 45 Orientation Map Based Palmprint Recognition B. H. Shekar, N. Harivinod bhshekar@gmail.com, harivinodn@gmail.com India, Mangalore University, Department
CSE 546 Midterm Exam, Fall 2014
 CSE 546 Midterm Eam, Fall 2014 1. Personal info: Name: UW NetID: Student ID: 2. There should be 14 numbered pages in this eam (including this cover sheet). 3. You can use an material ou brought: an book,
CSE 546 Midterm Eam, Fall 2014 1. Personal info: Name: UW NetID: Student ID: 2. There should be 14 numbered pages in this eam (including this cover sheet). 3. You can use an material ou brought: an book,
Laplacian Filters. Sobel Filters. Laplacian Filters. Laplacian Filters. Laplacian Filters. Laplacian Filters
 Sobel Filters Note that smoothing the image before applying a Sobel filter typically gives better results. Even thresholding the Sobel filtered image cannot usually create precise, i.e., -pixel wide, edges.
Sobel Filters Note that smoothing the image before applying a Sobel filter typically gives better results. Even thresholding the Sobel filtered image cannot usually create precise, i.e., -pixel wide, edges.
Clustering by Mixture Models. General background on clustering Example method: k-means Mixture model based clustering Model estimation
 Clustering by Mixture Models General bacground on clustering Example method: -means Mixture model based clustering Model estimation 1 Clustering A basic tool in data mining/pattern recognition: Divide
Clustering by Mixture Models General bacground on clustering Example method: -means Mixture model based clustering Model estimation 1 Clustering A basic tool in data mining/pattern recognition: Divide
Statistical Geometry Processing Winter Semester 2011/2012
 Statistical Geometry Processing Winter Semester 2011/2012 Linear Algebra, Function Spaces & Inverse Problems Vector and Function Spaces 3 Vectors vectors are arrows in space classically: 2 or 3 dim. Euclidian
Statistical Geometry Processing Winter Semester 2011/2012 Linear Algebra, Function Spaces & Inverse Problems Vector and Function Spaces 3 Vectors vectors are arrows in space classically: 2 or 3 dim. Euclidian
Boosting color saliency in image feature detection
 Boosting color saliency in image feature detection Joost Van de Weijer, Theo Gevers, Andrew Bagdanov To cite this version: Joost Van de Weijer, Theo Gevers, Andrew Bagdanov. Boosting color saliency in
Boosting color saliency in image feature detection Joost Van de Weijer, Theo Gevers, Andrew Bagdanov To cite this version: Joost Van de Weijer, Theo Gevers, Andrew Bagdanov. Boosting color saliency in
MAXIMA & MINIMA The single-variable definitions and theorems relating to extermals can be extended to apply to multivariable calculus.
 MAXIMA & MINIMA The single-variable definitions and theorems relating to etermals can be etended to appl to multivariable calculus. ( ) is a Relative Maimum if there ( ) such that ( ) f(, for all points
MAXIMA & MINIMA The single-variable definitions and theorems relating to etermals can be etended to appl to multivariable calculus. ( ) is a Relative Maimum if there ( ) such that ( ) f(, for all points
Region Covariance: A Fast Descriptor for Detection and Classification
 MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Region Covariance: A Fast Descriptor for Detection and Classification Oncel Tuzel, Fatih Porikli, Peter Meer TR2005-111 May 2006 Abstract We
MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Region Covariance: A Fast Descriptor for Detection and Classification Oncel Tuzel, Fatih Porikli, Peter Meer TR2005-111 May 2006 Abstract We
Is the Scale Invariant Feature Transform (SIFT) really Scale Invariant?
 really Scale Invariant?") Is the Scale Invariant Feature Transform (SIFT) really Scale Invariant? Course prepared by: Jean-Michel Morel, Guoshen Yu and Ives Rey Otero October 24, 2010 Abstract This note is devoted to a mathematical
Is the Scale Invariant Feature Transform (SIFT) really Scale Invariant? Course prepared by: Jean-Michel Morel, Guoshen Yu and Ives Rey Otero October 24, 2010 Abstract This note is devoted to a mathematical
Deformation and Viewpoint Invariant Color Histograms
 1 Deformation and Viewpoint Invariant Histograms Justin Domke and Yiannis Aloimonos Computer Vision Laboratory, Department of Computer Science University of Maryland College Park, MD 274, USA domke@cs.umd.edu,
1 Deformation and Viewpoint Invariant Histograms Justin Domke and Yiannis Aloimonos Computer Vision Laboratory, Department of Computer Science University of Maryland College Park, MD 274, USA domke@cs.umd.edu,
Computer Vision & Digital Image Processing
 Computer Vision & Digital Image Processing Image Segmentation Dr. D. J. Jackson Lecture 6- Image segmentation Segmentation divides an image into its constituent parts or objects Level of subdivision depends
Computer Vision & Digital Image Processing Image Segmentation Dr. D. J. Jackson Lecture 6- Image segmentation Segmentation divides an image into its constituent parts or objects Level of subdivision depends
HW 5 Date: Name Use Scantron 882E to transfer the answers. Graph. 1) y = 5x
 y = 5x") HW 5 Date: Name Use Scantron 88E to transfer the answers. Graph. ) = 5 ) A) - - - - - - - - - - - - C) D) - - - - - - - - - - - - Differentiate. ) f() = e8 A) e8 8e8 C) 8e D) 8 e 8 ) 3) = e9/ A) 9 e 9/
HW 5 Date: Name Use Scantron 88E to transfer the answers. Graph. ) = 5 ) A) - - - - - - - - - - - - C) D) - - - - - - - - - - - - Differentiate. ) f() = e8 A) e8 8e8 C) 8e D) 8 e 8 ) 3) = e9/ A) 9 e 9/
EECS150 - Digital Design Lecture 15 SIFT2 + FSM. Recap and Outline
 EECS150 - Digital Design Lecture 15 SIFT2 + FSM Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
EECS150 - Digital Design Lecture 15 SIFT2 + FSM Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
CELLULAR NEURAL NETWORKS & APPLICATIONS TO IMAGE PROCESSING. Vedat Tavsanoglu School of EEIE SOUTH BANK UNIVERSITY LONDON UK
 CELLULAR NEURAL NETWORKS & APPLICATIONS TO IMAGE PROCESSING Vedat Tavsanoglu School of EEIE SOUTH BANK UNIVERSITY LONDON UK Outline What is CNN? Architecture of CNN Analogue Computing with CNN Advantages
CELLULAR NEURAL NETWORKS & APPLICATIONS TO IMAGE PROCESSING Vedat Tavsanoglu School of EEIE SOUTH BANK UNIVERSITY LONDON UK Outline What is CNN? Architecture of CNN Analogue Computing with CNN Advantages
EPIPOLAR GEOMETRY WITH MANY DETAILS
 EPIPOLAR GEOMERY WIH MANY DEAILS hank ou for the slides. he come mostl from the following source. Marc Pollefes U. of North Carolina hree questions: (i) Correspondence geometr: Given an image point in
EPIPOLAR GEOMERY WIH MANY DEAILS hank ou for the slides. he come mostl from the following source. Marc Pollefes U. of North Carolina hree questions: (i) Correspondence geometr: Given an image point in
SYMMETRY is a highly salient visual phenomenon and
 JOURNAL OF L A T E X CLASS FILES, VOL. 6, NO. 1, JANUARY 2011 1 Symmetry-Growing for Skewed Rotational Symmetry Detection Hyo Jin Kim, Student Member, IEEE, Minsu Cho, Student Member, IEEE, and Kyoung
JOURNAL OF L A T E X CLASS FILES, VOL. 6, NO. 1, JANUARY 2011 1 Symmetry-Growing for Skewed Rotational Symmetry Detection Hyo Jin Kim, Student Member, IEEE, Minsu Cho, Student Member, IEEE, and Kyoung