The state of the art and beyond
|
|
|
- Victoria Warner
- 6 years ago
- Views:
Transcription
1
2 Feature Detectors and Descriptors The state of the art and beyond Local covariant detectors and descriptors have been successful in many applications Registration Stereo vision Motion estimation Matching Retrieval Classification Detection Action recognition Robot navigation However, they have still many issues to address 2/30
3 Different classes of detector in term of generality Harris, DoG, EBR, MSER. All possible task Sharable category-specific features Category specific Object specific Detector of a particular patch Of course, in the restricted domain, performance goes up, but at a cost (learning required, multiple detectors run, may overfit). Direct comparison in terms of e.g. repeatability not appropriate. 3/30
4 Detector & Descriptor evaluation issues Mikolajczyk et al. IJCV 05 protocol, but: Bias towards dense responses: Larger number of detection better performance (return all windows and you ll be perfect) Bias towards large regions: No parallax (either flat scene or same viewpoint) Bias towards (current) detector-friendly problems: Scenes selected so that standard detectors perform well. There are many image categories, where standard detectors are useless. Increasing generality (applicability) cannot be demonstrated on this dataset Limited number of scenes, risk of over-fitting 4/30
5 Detector & Descriptor evaluation issues Mikolajczyk k et al. IJCV 05 protocol (like all others we know) ignore important aspects of detectors: Memory requirements note papers dealing with the how do I reduce memory needs problem, very important for large scale problem Speed this might be overrated, most detector are not the bottleneck of a system, most can be parallelized easily, should be well motivated Coverage reasonable spatial distribution of features is beneficial ; metric not clear Complementarity even a underperforming feature in terms of repeatability is valuable, if complementary Geometric precision i Degrees of freedom fixed Can the Mikolajczyk et al. protocol be fixed? future work 5/30
6 Detector & Descriptor as Components Performance in different application/niches may vary significantly; ifi different aspects are important Evaluation in context of some (general) application such as categorization is important see Evaluation Report later In a system, yet another set of aspects of a detector becomes important: e.g. efficient feedback control, adaptability 6/30


7 Previous Evaluations 2D Scene Homography C. Schmid, R. Mohr, and C. Bauckhage, Evaluation of interest point detectors, IJCV, K. Mikolajczyk and C. Schmid, A performance evaluation of local descriptors, CVPR, T. Kadir, M. Brady, and A. Zisserman, An affine invariant method for selecting salient regions in images, in ECCV, K. Mikolajczyk, T. Tuytelaars, C. Schmid, A. Zisserman, J. Matas, F. Schaffalitzky,T. Kadir, and L. Van Gool, A comparison of affine region detectors, IJCV, A. Haja, S. Abraham, and B. Jahne, Localization accuracy of region detectors, t CVPR /30






8 Previous Evaluations 3D Scene - epipolar constraints t F. Fraundorfer and H. Bischof, Evaluation of local detectors on nonplanar, scenes, in AAPR, P. Moreels and P. Perona, Evaluation of features detectors and descriptors based on 3D objects, IJCV, S. Winder and M. Brown, Learning local image descriptors, CVPR, 2007, /30
9 Previous Evaluations Image/object categories K. Mikolajczyk, B. Leibe, and B. Schiele, Local features for object class recognition, in ICCV, 2005 E. Seemann, B. Leibe, K. Mikolajczyk, and B. Schiele, An evaluation of local shape-based features for pedestrian detection, in BMVC, M. Stark and B. Schiele, How good are local features for classes of geometric objects, in ICCV, K. E. A. van de Sande, T. Gevers and C. G. M. Snoek, Evaluation of Color Descriptors for Object and Scene Recognition. CVPR, /30
10 Domains Recent Developments Registration Stereo vision Motion estimation Matching Retrieval Classification Detection Action recognition Robot navigation 10/30
11 Recent Developments Learning features from the data Interest point detectors - decision trees, AdaBoost Local descriptors exhaustive optimizations of descriptor parameters Improving discriminability dimensionality/memory reduction LDA, PCA Feature selection General saliency, application driven selection Quantization Clustering Efficient features extraction algorithms Integral images, sampling strategies, GPU implementations Domain specific features 3D, spatio-temporal, IR, biology, medical imaging 11/30
12 Feature Detectors and Descriptors Evaluation for image classification KrystianMikolajczyk and Mark Barnard University of Surrey, UK CVPR, Miami, 2009
13 Setting up an evaluation Which problem? Category recognition Bags-of features What dataset? Pascal VOC 2007 Protocol and criteria? Public dataset, Avoiding risk to over-fitting/optimizing g to the data 13/30


14 Dataset PASCAL VOC 2007, 20 object categories, 5011 training/validation images 4952 test images 24,640 annotated objects 14/30
15 Bags-of-features Approach 1. Interest point / region detector 2. Descriptors 3. K-means clustering (4000 clusters) 4. Histogram of cluster occurrences (NN assignment) 5. Chi-square distance and RBF kernel for KDA or SVM classifier J. Zhang and M. Marszalek and S. Lazebnik and C. Schmid, Local Features and Kernels for Classification of Texture and Object Categories: A Comprehensive Study, IJCV, 2007 K. E. A. van de Sande, T. Gevers and dc. G. M. Snoek, Evaluation of Color Descriptors for Object and Scene Recognition. CVPR, /30
16 Evaluation PASCAL VOC measures Average precision for every object category Mean average precision Category AP recision prap output=> recall 16/30
17 Recognition Evaluation Protocol, data, binaries i 17/30
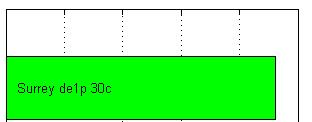
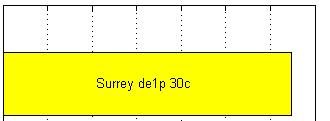
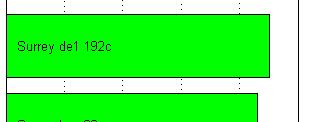
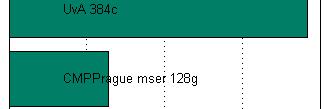
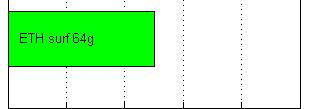
18 Evaluated Features 33 different features types University of Amsterdam TU Vienna CMP Prague ETH Zurich EPFL Lausanne University of Surrey Stanford University Harvard Medical School 18/30
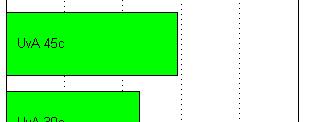
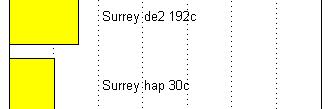
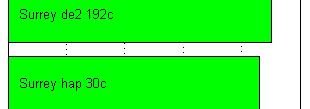
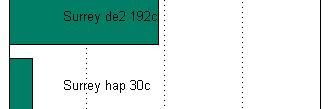
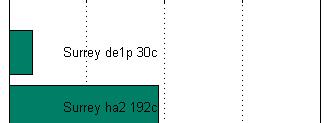
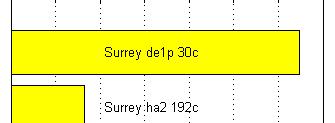
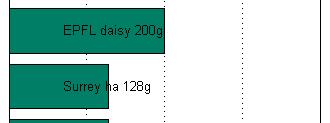
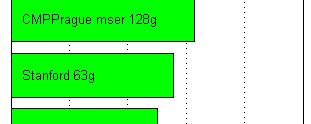
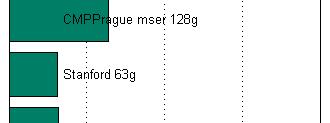
19 Features Region detectors t (combined with SIFT descriptor) MSER CMP Prague Computed in opponent chromatic space Harris-Laplace, Hessian-Laplace, Surrey UK Improved localization and scale precision Dog (D. Lowe) Sparse color features, TU Vienna Color Harris detector Region descriptors (combined with Harris-Laplace detector) Original Sift (D. Lowe) Color descriptors (histograms, moments, SIFT) - UvA Amsterdam DAISY EPFL Lausanne SURF ETH Zurich Color descriptors - Surrey UK Ordinal SIFT Harvard CHoG Stanford 19/30

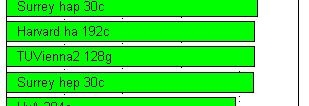
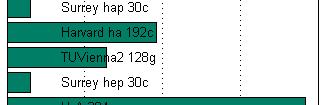

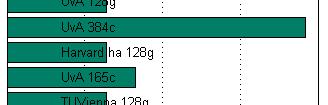

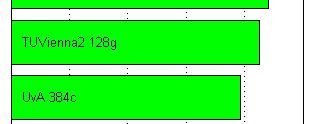
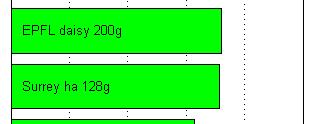
20 MAP Ranking color/gray, density, dimensionality... MAP #dimensions density 20/30
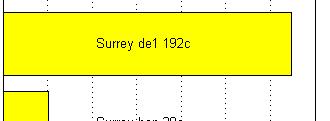
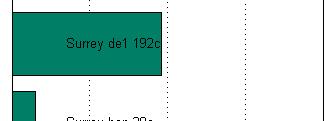
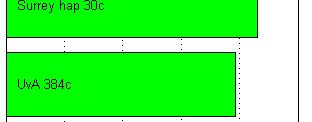
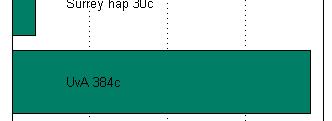

21 P07/DM Dimensionality MAP #dimensions density Observations Dimensionality not much correlated with the performance 21/30


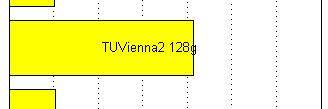
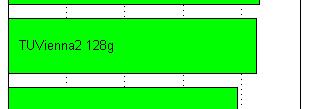
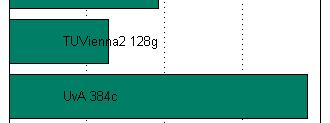
22 P07/DS Density MAP Ranking density #dimensions Observations Strongly correlated (the more the better) 22/30

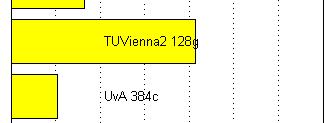

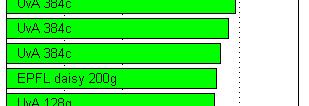
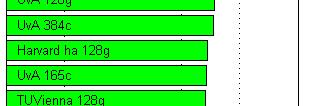
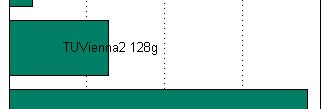
23 P07/GD Grayvalue descriptors MAP Ranking #dimensions density Observations Color improves All based on histograms of gradient locations and orientations Results biased by density Implementation details matter 23/30



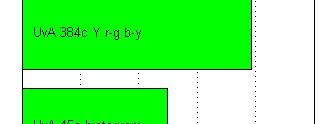
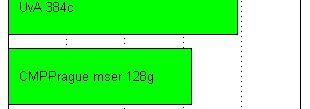
24 P07/CD Color Descriptors MAP Ranking #dimensions density Observations SIFT still dominates(histograms of gradient locations and orientations) Opponent chromatic space (normalized red-green, blue-yellow, and intensity Y) 24/30






25 P07/OC per object category Ranked 1st Ranked 2nd Observations No single best feature, different features suitable for different categories Bias from the number of training images 25/30
26 P07/MK Multi-Kernel e Fusion per object category 26/30
27 Conclusions Histograms of gradient location-orientation dominate Color brings improvement for most classes opponent chromatic space Feature number the more the better Similar ranking in image matching performance generalizes across applications 27/30
Overview. Introduction to local features. Harris interest points + SSD, ZNCC, SIFT. Evaluation and comparison of different detectors
 Overview Introduction to local features Harris interest points + SSD, ZNCC, SIFT Scale & affine invariant interest point detectors Evaluation and comparison of different detectors Region descriptors and
Overview Introduction to local features Harris interest points + SSD, ZNCC, SIFT Scale & affine invariant interest point detectors Evaluation and comparison of different detectors Region descriptors and
Maximally Stable Local Description for Scale Selection
 Maximally Stable Local Description for Scale Selection Gyuri Dorkó and Cordelia Schmid INRIA Rhône-Alpes, 655 Avenue de l Europe, 38334 Montbonnot, France {gyuri.dorko,cordelia.schmid}@inrialpes.fr Abstract.
Maximally Stable Local Description for Scale Selection Gyuri Dorkó and Cordelia Schmid INRIA Rhône-Alpes, 655 Avenue de l Europe, 38334 Montbonnot, France {gyuri.dorko,cordelia.schmid}@inrialpes.fr Abstract.
Overview. Introduction to local features. Harris interest points + SSD, ZNCC, SIFT. Evaluation and comparison of different detectors
 Overview Introduction to local features Harris interest points + SSD, ZNCC, SIFT Scale & affine invariant interest point detectors Evaluation and comparison of different detectors Region descriptors and
Overview Introduction to local features Harris interest points + SSD, ZNCC, SIFT Scale & affine invariant interest point detectors Evaluation and comparison of different detectors Region descriptors and
Advances in Computer Vision. Prof. Bill Freeman. Image and shape descriptors. Readings: Mikolajczyk and Schmid; Belongie et al.
 6.869 Advances in Computer Vision Prof. Bill Freeman March 3, 2005 Image and shape descriptors Affine invariant features Comparison of feature descriptors Shape context Readings: Mikolajczyk and Schmid;
6.869 Advances in Computer Vision Prof. Bill Freeman March 3, 2005 Image and shape descriptors Affine invariant features Comparison of feature descriptors Shape context Readings: Mikolajczyk and Schmid;
Overview. Harris interest points. Comparing interest points (SSD, ZNCC, SIFT) Scale & affine invariant interest points
 Scale & affine invariant interest points") Overview Harris interest points Comparing interest points (SSD, ZNCC, SIFT) Scale & affine invariant interest points Evaluation and comparison of different detectors Region descriptors and their performance
Overview Harris interest points Comparing interest points (SSD, ZNCC, SIFT) Scale & affine invariant interest points Evaluation and comparison of different detectors Region descriptors and their performance
Invariant local features. Invariant Local Features. Classes of transformations. (Good) invariant local features. Case study: panorama stitching
 invariant local features. Case study: panorama stitching") Invariant local eatures Invariant Local Features Tuesday, February 6 Subset o local eature types designed to be invariant to Scale Translation Rotation Aine transormations Illumination 1) Detect distinctive
Invariant local eatures Invariant Local Features Tuesday, February 6 Subset o local eature types designed to be invariant to Scale Translation Rotation Aine transormations Illumination 1) Detect distinctive
Wavelet-based Salient Points with Scale Information for Classification
 Wavelet-based Salient Points with Scale Information for Classification Alexandra Teynor and Hans Burkhardt Department of Computer Science, Albert-Ludwigs-Universität Freiburg, Germany {teynor, Hans.Burkhardt}@informatik.uni-freiburg.de
Wavelet-based Salient Points with Scale Information for Classification Alexandra Teynor and Hans Burkhardt Department of Computer Science, Albert-Ludwigs-Universität Freiburg, Germany {teynor, Hans.Burkhardt}@informatik.uni-freiburg.de
Feature detectors and descriptors. Fei-Fei Li
 Feature detectors and descriptors Fei-Fei Li Feature Detection e.g. DoG detected points (~300) coordinates, neighbourhoods Feature Description e.g. SIFT local descriptors (invariant) vectors database of
Feature detectors and descriptors Fei-Fei Li Feature Detection e.g. DoG detected points (~300) coordinates, neighbourhoods Feature Description e.g. SIFT local descriptors (invariant) vectors database of
Feature detectors and descriptors. Fei-Fei Li
 Feature detectors and descriptors Fei-Fei Li Feature Detection e.g. DoG detected points (~300) coordinates, neighbourhoods Feature Description e.g. SIFT local descriptors (invariant) vectors database of
Feature detectors and descriptors Fei-Fei Li Feature Detection e.g. DoG detected points (~300) coordinates, neighbourhoods Feature Description e.g. SIFT local descriptors (invariant) vectors database of
Corners, Blobs & Descriptors. With slides from S. Lazebnik & S. Seitz, D. Lowe, A. Efros
 Corners, Blobs & Descriptors With slides from S. Lazebnik & S. Seitz, D. Lowe, A. Efros Motivation: Build a Panorama M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 How do we build panorama?
Corners, Blobs & Descriptors With slides from S. Lazebnik & S. Seitz, D. Lowe, A. Efros Motivation: Build a Panorama M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 How do we build panorama?
Recap: edge detection. Source: D. Lowe, L. Fei-Fei
 Recap: edge detection Source: D. Lowe, L. Fei-Fei Canny edge detector 1. Filter image with x, y derivatives of Gaussian 2. Find magnitude and orientation of gradient 3. Non-maximum suppression: Thin multi-pixel
Recap: edge detection Source: D. Lowe, L. Fei-Fei Canny edge detector 1. Filter image with x, y derivatives of Gaussian 2. Find magnitude and orientation of gradient 3. Non-maximum suppression: Thin multi-pixel
Scale & Affine Invariant Interest Point Detectors
 Scale & Affine Invariant Interest Point Detectors Krystian Mikolajczyk and Cordelia Schmid Presented by Hunter Brown & Gaurav Pandey, February 19, 2009 Roadmap: Motivation Scale Invariant Detector Affine
Scale & Affine Invariant Interest Point Detectors Krystian Mikolajczyk and Cordelia Schmid Presented by Hunter Brown & Gaurav Pandey, February 19, 2009 Roadmap: Motivation Scale Invariant Detector Affine
Lecture 8: Interest Point Detection. Saad J Bedros
 #1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Review of Edge Detectors #2 Today s Lecture Interest Points Detection What do we mean with Interest Point Detection in an Image Goal:
#1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Review of Edge Detectors #2 Today s Lecture Interest Points Detection What do we mean with Interest Point Detection in an Image Goal:
Properties of detectors Edge detectors Harris DoG Properties of descriptors SIFT HOG Shape context
 Lecture 10 Detectors and descriptors Properties of detectors Edge detectors Harris DoG Properties of descriptors SIFT HOG Shape context Silvio Savarese Lecture 10-16-Feb-15 From the 3D to 2D & vice versa
Lecture 10 Detectors and descriptors Properties of detectors Edge detectors Harris DoG Properties of descriptors SIFT HOG Shape context Silvio Savarese Lecture 10-16-Feb-15 From the 3D to 2D & vice versa
Blobs & Scale Invariance
 Blobs & Scale Invariance Prof. Didier Stricker Doz. Gabriele Bleser Computer Vision: Object and People Tracking With slides from Bebis, S. Lazebnik & S. Seitz, D. Lowe, A. Efros 1 Apertizer: some videos
Blobs & Scale Invariance Prof. Didier Stricker Doz. Gabriele Bleser Computer Vision: Object and People Tracking With slides from Bebis, S. Lazebnik & S. Seitz, D. Lowe, A. Efros 1 Apertizer: some videos
Rotational Invariants for Wide-baseline Stereo
 Rotational Invariants for Wide-baseline Stereo Jiří Matas, Petr Bílek, Ondřej Chum Centre for Machine Perception Czech Technical University, Department of Cybernetics Karlovo namesti 13, Prague, Czech
Rotational Invariants for Wide-baseline Stereo Jiří Matas, Petr Bílek, Ondřej Chum Centre for Machine Perception Czech Technical University, Department of Cybernetics Karlovo namesti 13, Prague, Czech
Detectors part II Descriptors
 EECS 442 Computer vision Detectors part II Descriptors Blob detectors Invariance Descriptors Some slides of this lectures are courtesy of prof F. Li, prof S. Lazebnik, and various other lecturers Goal:
EECS 442 Computer vision Detectors part II Descriptors Blob detectors Invariance Descriptors Some slides of this lectures are courtesy of prof F. Li, prof S. Lazebnik, and various other lecturers Goal:
Fisher Vector image representation
 Fisher Vector image representation Machine Learning and Category Representation 2014-2015 Jakob Verbeek, January 9, 2015 Course website: http://lear.inrialpes.fr/~verbeek/mlcr.14.15 A brief recap on kernel
Fisher Vector image representation Machine Learning and Category Representation 2014-2015 Jakob Verbeek, January 9, 2015 Course website: http://lear.inrialpes.fr/~verbeek/mlcr.14.15 A brief recap on kernel
Distinguish between different types of scenes. Matching human perception Understanding the environment
 Scene Recognition Adriana Kovashka UTCS, PhD student Problem Statement Distinguish between different types of scenes Applications Matching human perception Understanding the environment Indexing of images
Scene Recognition Adriana Kovashka UTCS, PhD student Problem Statement Distinguish between different types of scenes Applications Matching human perception Understanding the environment Indexing of images
Pictorial Structures Revisited: People Detection and Articulated Pose Estimation. Department of Computer Science TU Darmstadt
 Pictorial Structures Revisited: People Detection and Articulated Pose Estimation Mykhaylo Andriluka Stefan Roth Bernt Schiele Department of Computer Science TU Darmstadt Generic model for human detection
Pictorial Structures Revisited: People Detection and Articulated Pose Estimation Mykhaylo Andriluka Stefan Roth Bernt Schiele Department of Computer Science TU Darmstadt Generic model for human detection
Lecture 6: Finding Features (part 1/2)
") Lecture 6: Finding Features (part 1/2) Professor Fei- Fei Li Stanford Vision Lab Lecture 6 -! 1 What we will learn today? Local invariant features MoHvaHon Requirements, invariances Keypoint localizahon
Lecture 6: Finding Features (part 1/2) Professor Fei- Fei Li Stanford Vision Lab Lecture 6 -! 1 What we will learn today? Local invariant features MoHvaHon Requirements, invariances Keypoint localizahon
INTEREST POINTS AT DIFFERENT SCALES
 INTEREST POINTS AT DIFFERENT SCALES Thank you for the slides. They come mostly from the following sources. Dan Huttenlocher Cornell U David Lowe U. of British Columbia Martial Hebert CMU Intuitively, junctions
INTEREST POINTS AT DIFFERENT SCALES Thank you for the slides. They come mostly from the following sources. Dan Huttenlocher Cornell U David Lowe U. of British Columbia Martial Hebert CMU Intuitively, junctions
Feature extraction: Corners and blobs
 Feature extraction: Corners and blobs Review: Linear filtering and edge detection Name two different kinds of image noise Name a non-linear smoothing filter What advantages does median filtering have over
Feature extraction: Corners and blobs Review: Linear filtering and edge detection Name two different kinds of image noise Name a non-linear smoothing filter What advantages does median filtering have over
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely Lecture 5: Feature descriptors and matching Szeliski: 4.1 Reading Announcements Project 1 Artifacts due tomorrow, Friday 2/17, at 11:59pm Project 2 will be released
CS5670: Computer Vision Noah Snavely Lecture 5: Feature descriptors and matching Szeliski: 4.1 Reading Announcements Project 1 Artifacts due tomorrow, Friday 2/17, at 11:59pm Project 2 will be released
LoG Blob Finding and Scale. Scale Selection. Blobs (and scale selection) Achieving scale covariance. Blob detection in 2D. Blob detection in 2D
 Achieving scale covariance. Blob detection in 2D. Blob detection in 2D") Achieving scale covariance Blobs (and scale selection) Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region
Achieving scale covariance Blobs (and scale selection) Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region
Achieving scale covariance
 Achieving scale covariance Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region size that is covariant
Achieving scale covariance Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region size that is covariant
Compressed Fisher vectors for LSVR
 XRCE@ILSVRC2011 Compressed Fisher vectors for LSVR Florent Perronnin and Jorge Sánchez* Xerox Research Centre Europe (XRCE) *Now with CIII, Cordoba University, Argentina Our system in a nutshell High-dimensional
XRCE@ILSVRC2011 Compressed Fisher vectors for LSVR Florent Perronnin and Jorge Sánchez* Xerox Research Centre Europe (XRCE) *Now with CIII, Cordoba University, Argentina Our system in a nutshell High-dimensional
Kernel Density Topic Models: Visual Topics Without Visual Words
 Kernel Density Topic Models: Visual Topics Without Visual Words Konstantinos Rematas K.U. Leuven ESAT-iMinds krematas@esat.kuleuven.be Mario Fritz Max Planck Institute for Informatics mfrtiz@mpi-inf.mpg.de
Kernel Density Topic Models: Visual Topics Without Visual Words Konstantinos Rematas K.U. Leuven ESAT-iMinds krematas@esat.kuleuven.be Mario Fritz Max Planck Institute for Informatics mfrtiz@mpi-inf.mpg.de
Edges and Scale. Image Features. Detecting edges. Origin of Edges. Solution: smooth first. Effects of noise
 Edges and Scale Image Features From Sandlot Science Slides revised from S. Seitz, R. Szeliski, S. Lazebnik, etc. Origin of Edges surface normal discontinuity depth discontinuity surface color discontinuity
Edges and Scale Image Features From Sandlot Science Slides revised from S. Seitz, R. Szeliski, S. Lazebnik, etc. Origin of Edges surface normal discontinuity depth discontinuity surface color discontinuity
38 1 Vol. 38, No ACTA AUTOMATICA SINICA January, Bag-of-phrases.. Image Representation Using Bag-of-phrases
 38 1 Vol. 38, No. 1 2012 1 ACTA AUTOMATICA SINICA January, 2012 Bag-of-phrases 1, 2 1 1 1, Bag-of-words,,, Bag-of-words, Bag-of-phrases, Bag-of-words DOI,, Bag-of-words, Bag-of-phrases, SIFT 10.3724/SP.J.1004.2012.00046
38 1 Vol. 38, No. 1 2012 1 ACTA AUTOMATICA SINICA January, 2012 Bag-of-phrases 1, 2 1 1 1, Bag-of-words,,, Bag-of-words, Bag-of-phrases, Bag-of-words DOI,, Bag-of-words, Bag-of-phrases, SIFT 10.3724/SP.J.1004.2012.00046
Affine Adaptation of Local Image Features Using the Hessian Matrix
 29 Advanced Video and Signal Based Surveillance Affine Adaptation of Local Image Features Using the Hessian Matrix Ruan Lakemond, Clinton Fookes, Sridha Sridharan Image and Video Research Laboratory Queensland
29 Advanced Video and Signal Based Surveillance Affine Adaptation of Local Image Features Using the Hessian Matrix Ruan Lakemond, Clinton Fookes, Sridha Sridharan Image and Video Research Laboratory Queensland
Photo Tourism and im2gps: 3D Reconstruction and Geolocation of Internet Photo Collections Part II
 Photo Tourism and im2gps: 3D Reconstruction and Geolocation of Internet Photo Collections Part II Noah Snavely Cornell James Hays CMU MIT (Fall 2009) Brown (Spring 2010 ) Complexity of the Visual World
Photo Tourism and im2gps: 3D Reconstruction and Geolocation of Internet Photo Collections Part II Noah Snavely Cornell James Hays CMU MIT (Fall 2009) Brown (Spring 2010 ) Complexity of the Visual World
SURVEY OF APPEARANCE-BASED METHODS FOR OBJECT RECOGNITION
 SURVEY OF APPEARANCE-BASED METHODS FOR OBJECT RECOGNITION Peter M. Roth and Martin Winter Inst. for Computer Graphics and Vision Graz University of Technology, Austria Technical Report ICG TR 01/08 Graz,
SURVEY OF APPEARANCE-BASED METHODS FOR OBJECT RECOGNITION Peter M. Roth and Martin Winter Inst. for Computer Graphics and Vision Graz University of Technology, Austria Technical Report ICG TR 01/08 Graz,
Rapid Object Recognition from Discriminative Regions of Interest
 Rapid Object Recognition from Discriminative Regions of Interest Gerald Fritz, Christin Seifert, Lucas Paletta JOANNEUM RESEARCH Institute of Digital Image Processing Wastiangasse 6, A-81 Graz, Austria
Rapid Object Recognition from Discriminative Regions of Interest Gerald Fritz, Christin Seifert, Lucas Paletta JOANNEUM RESEARCH Institute of Digital Image Processing Wastiangasse 6, A-81 Graz, Austria
Space-time Zernike Moments and Pyramid Kernel Descriptors for Action Classification
 Space-time Zernike Moments and Pyramid Kernel Descriptors for Action Classification Luca Costantini 2, Lorenzo Seidenari 1, Giuseppe Serra 1, Licia Capodiferro 2, and Alberto Del Bimbo 1 1 Media Integration
Space-time Zernike Moments and Pyramid Kernel Descriptors for Action Classification Luca Costantini 2, Lorenzo Seidenari 1, Giuseppe Serra 1, Licia Capodiferro 2, and Alberto Del Bimbo 1 1 Media Integration
Human Action Recognition under Log-Euclidean Riemannian Metric
 Human Action Recognition under Log-Euclidean Riemannian Metric Chunfeng Yuan, Weiming Hu, Xi Li, Stephen Maybank 2, Guan Luo, National Laboratory of Pattern Recognition, Institute of Automation, CAS, Beijing,
Human Action Recognition under Log-Euclidean Riemannian Metric Chunfeng Yuan, Weiming Hu, Xi Li, Stephen Maybank 2, Guan Luo, National Laboratory of Pattern Recognition, Institute of Automation, CAS, Beijing,
Local Features (contd.)
") Motivation Local Features (contd.) Readings: Mikolajczyk and Schmid; F&P Ch 10 Feature points are used also or: Image alignment (homography, undamental matrix) 3D reconstruction Motion tracking Object
Motivation Local Features (contd.) Readings: Mikolajczyk and Schmid; F&P Ch 10 Feature points are used also or: Image alignment (homography, undamental matrix) 3D reconstruction Motion tracking Object
Learning Discriminative and Transformation Covariant Local Feature Detectors
 Learning Discriminative and Transformation Covariant Local Feature Detectors Xu Zhang 1, Felix X. Yu 2, Svebor Karaman 1, Shih-Fu Chang 1 1 Columbia University, 2 Google Research {xu.zhang, svebor.karaman,
Learning Discriminative and Transformation Covariant Local Feature Detectors Xu Zhang 1, Felix X. Yu 2, Svebor Karaman 1, Shih-Fu Chang 1 1 Columbia University, 2 Google Research {xu.zhang, svebor.karaman,
Pedestrian Density Estimation by a Weighted Bag of Visual Words Model
 Pedestrian Density Estimation by a Weighted Bag of Visual Words Model Shilin Zhang and Xunyuan Zhang image representation termed bag of visual words integrating weighting scheme and spatial pyramid co-occurrence,
Pedestrian Density Estimation by a Weighted Bag of Visual Words Model Shilin Zhang and Xunyuan Zhang image representation termed bag of visual words integrating weighting scheme and spatial pyramid co-occurrence,
EE 6882 Visual Search Engine
 EE 6882 Visual Search Engine Prof. Shih Fu Chang, Feb. 13 th 2012 Lecture #4 Local Feature Matching Bag of Word image representation: coding and pooling (Many slides from A. Efors, W. Freeman, C. Kambhamettu,
EE 6882 Visual Search Engine Prof. Shih Fu Chang, Feb. 13 th 2012 Lecture #4 Local Feature Matching Bag of Word image representation: coding and pooling (Many slides from A. Efors, W. Freeman, C. Kambhamettu,
Global Scene Representations. Tilke Judd
 Global Scene Representations Tilke Judd Papers Oliva and Torralba [2001] Fei Fei and Perona [2005] Labzebnik, Schmid and Ponce [2006] Commonalities Goal: Recognize natural scene categories Extract features
Global Scene Representations Tilke Judd Papers Oliva and Torralba [2001] Fei Fei and Perona [2005] Labzebnik, Schmid and Ponce [2006] Commonalities Goal: Recognize natural scene categories Extract features
Lecture 12. Local Feature Detection. Matching with Invariant Features. Why extract features? Why extract features? Why extract features?
 Lecture 1 Why extract eatures? Motivation: panorama stitching We have two images how do we combine them? Local Feature Detection Guest lecturer: Alex Berg Reading: Harris and Stephens David Lowe IJCV We
Lecture 1 Why extract eatures? Motivation: panorama stitching We have two images how do we combine them? Local Feature Detection Guest lecturer: Alex Berg Reading: Harris and Stephens David Lowe IJCV We
Image Analysis. Feature extraction: corners and blobs
 Image Analysis Feature extraction: corners and blobs Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Svetlana Lazebnik, University of North Carolina at Chapel Hill (http://www.cs.unc.edu/~lazebnik/spring10/).
Image Analysis Feature extraction: corners and blobs Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Svetlana Lazebnik, University of North Carolina at Chapel Hill (http://www.cs.unc.edu/~lazebnik/spring10/).
Lecture 8: Interest Point Detection. Saad J Bedros
 #1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Last Lecture : Edge Detection Preprocessing of image is desired to eliminate or at least minimize noise effects There is always tradeoff
#1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Last Lecture : Edge Detection Preprocessing of image is desired to eliminate or at least minimize noise effects There is always tradeoff
SIFT keypoint detection. D. Lowe, Distinctive image features from scale-invariant keypoints, IJCV 60 (2), pp , 2004.
, pp , 2004.") SIFT keypoint detection D. Lowe, Distinctive image features from scale-invariant keypoints, IJCV 60 (), pp. 91-110, 004. Keypoint detection with scale selection We want to extract keypoints with characteristic
SIFT keypoint detection D. Lowe, Distinctive image features from scale-invariant keypoints, IJCV 60 (), pp. 91-110, 004. Keypoint detection with scale selection We want to extract keypoints with characteristic
Interpreting the Ratio Criterion for Matching SIFT Descriptors
 Interpreting the Ratio Criterion for Matching SIFT Descriptors Avi Kaplan, Tamar Avraham, Michael Lindenbaum Computer science department, Technion - I.I.T. kavi,tammya,mic@cs.technion.ac.il Abstract. Matching
Interpreting the Ratio Criterion for Matching SIFT Descriptors Avi Kaplan, Tamar Avraham, Michael Lindenbaum Computer science department, Technion - I.I.T. kavi,tammya,mic@cs.technion.ac.il Abstract. Matching
Riemannian Metric Learning for Symmetric Positive Definite Matrices
 CMSC 88J: Linear Subspaces and Manifolds for Computer Vision and Machine Learning Riemannian Metric Learning for Symmetric Positive Definite Matrices Raviteja Vemulapalli Guide: Professor David W. Jacobs
CMSC 88J: Linear Subspaces and Manifolds for Computer Vision and Machine Learning Riemannian Metric Learning for Symmetric Positive Definite Matrices Raviteja Vemulapalli Guide: Professor David W. Jacobs
Accumulated Stability Voting: A Robust Descriptor from Descriptors of Multiple Scales
 Accumulated Stability Voting: A Robust Descriptor from Descriptors of Multiple Scales Tsun-Yi Yang,2 Yen-Yu Lin Yung-Yu Chuang 2 Academia Sinica, Taiwan 2 National Taiwan University, Taiwan {shamangary,yylin}@citi.sinica.edu.tw
Accumulated Stability Voting: A Robust Descriptor from Descriptors of Multiple Scales Tsun-Yi Yang,2 Yen-Yu Lin Yung-Yu Chuang 2 Academia Sinica, Taiwan 2 National Taiwan University, Taiwan {shamangary,yylin}@citi.sinica.edu.tw
Probabilistic Latent Semantic Analysis
 Probabilistic Latent Semantic Analysis Dan Oneaţă 1 Introduction Probabilistic Latent Semantic Analysis (plsa) is a technique from the category of topic models. Its main goal is to model cooccurrence information
Probabilistic Latent Semantic Analysis Dan Oneaţă 1 Introduction Probabilistic Latent Semantic Analysis (plsa) is a technique from the category of topic models. Its main goal is to model cooccurrence information
DISCRIMINATIVE DECORELATION FOR CLUSTERING AND CLASSIFICATION
 DISCRIMINATIVE DECORELATION FOR CLUSTERING AND CLASSIFICATION ECCV 12 Bharath Hariharan, Jitandra Malik, and Deva Ramanan MOTIVATION State-of-the-art Object Detection HOG Linear SVM Dalal&Triggs Histograms
DISCRIMINATIVE DECORELATION FOR CLUSTERING AND CLASSIFICATION ECCV 12 Bharath Hariharan, Jitandra Malik, and Deva Ramanan MOTIVATION State-of-the-art Object Detection HOG Linear SVM Dalal&Triggs Histograms
On the Completeness of Coding with Image Features
 FÖRSTNER ET AL.: COMPLETENESS OF CODING WITH FEATURES 1 On the Completeness of Coding with Image Features Wolfgang Förstner http://www.ipb.uni-bonn.de/foerstner/ Timo Dickscheid http://www.ipb.uni-bonn.de/timodickscheid/
FÖRSTNER ET AL.: COMPLETENESS OF CODING WITH FEATURES 1 On the Completeness of Coding with Image Features Wolfgang Förstner http://www.ipb.uni-bonn.de/foerstner/ Timo Dickscheid http://www.ipb.uni-bonn.de/timodickscheid/
CS4495/6495 Introduction to Computer Vision. 8C-L3 Support Vector Machines
 CS4495/6495 Introduction to Computer Vision 8C-L3 Support Vector Machines Discriminative classifiers Discriminative classifiers find a division (surface) in feature space that separates the classes Several
CS4495/6495 Introduction to Computer Vision 8C-L3 Support Vector Machines Discriminative classifiers Discriminative classifiers find a division (surface) in feature space that separates the classes Several
Use Bin-Ratio Information for Category and Scene Classification
 Use Bin-Ratio Information for Category and Scene Classification Nianhua Xie 1,2, Haibin Ling 2, Weiming Hu 1, Xiaoqin Zhang 1 1 National Laboratory of Pattern Recognition, Institute of Automation, CAS,
Use Bin-Ratio Information for Category and Scene Classification Nianhua Xie 1,2, Haibin Ling 2, Weiming Hu 1, Xiaoqin Zhang 1 1 National Laboratory of Pattern Recognition, Institute of Automation, CAS,
Kai Yu NEC Laboratories America, Cupertino, California, USA
 Kai Yu NEC Laboratories America, Cupertino, California, USA Joint work with Jinjun Wang, Fengjun Lv, Wei Xu, Yihong Gong Xi Zhou, Jianchao Yang, Thomas Huang, Tong Zhang Chen Wu NEC Laboratories America
Kai Yu NEC Laboratories America, Cupertino, California, USA Joint work with Jinjun Wang, Fengjun Lv, Wei Xu, Yihong Gong Xi Zhou, Jianchao Yang, Thomas Huang, Tong Zhang Chen Wu NEC Laboratories America
Lecture 7: Finding Features (part 2/2)
") Lecture 7: Finding Features (part 2/2) Dr. Juan Carlos Niebles Stanford AI Lab Professor Fei- Fei Li Stanford Vision Lab 1 What we will learn today? Local invariant features MoPvaPon Requirements, invariances
Lecture 7: Finding Features (part 2/2) Dr. Juan Carlos Niebles Stanford AI Lab Professor Fei- Fei Li Stanford Vision Lab 1 What we will learn today? Local invariant features MoPvaPon Requirements, invariances
arxiv: v1 [cs.cv] 10 Feb 2016
![arxiv: v1 [cs.cv] 10 Feb 2016](/thumbs/76/73522588.jpg "arxiv: v1 [cs.cv] 10 Feb 2016") GABOR WAVELETS IN IMAGE PROCESSING David Bařina Doctoral Degree Programme (2), FIT BUT E-mail: xbarin2@stud.fit.vutbr.cz Supervised by: Pavel Zemčík E-mail: zemcik@fit.vutbr.cz arxiv:162.338v1 [cs.cv]
GABOR WAVELETS IN IMAGE PROCESSING David Bařina Doctoral Degree Programme (2), FIT BUT E-mail: xbarin2@stud.fit.vutbr.cz Supervised by: Pavel Zemčík E-mail: zemcik@fit.vutbr.cz arxiv:162.338v1 [cs.cv]
Blob Detection CSC 767
 Blob Detection CSC 767 Blob detection Slides: S. Lazebnik Feature detection with scale selection We want to extract features with characteristic scale that is covariant with the image transformation Blob
Blob Detection CSC 767 Blob detection Slides: S. Lazebnik Feature detection with scale selection We want to extract features with characteristic scale that is covariant with the image transformation Blob
Given a feature in I 1, how to find the best match in I 2?
 Feature Matching 1 Feature matching Given a feature in I 1, how to find the best match in I 2? 1. Define distance function that compares two descriptors 2. Test all the features in I 2, find the one with
Feature Matching 1 Feature matching Given a feature in I 1, how to find the best match in I 2? 1. Define distance function that compares two descriptors 2. Test all the features in I 2, find the one with
CSE 473/573 Computer Vision and Image Processing (CVIP)
") CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Lecture 11 Local Features 1 Schedule Last class We started local features Today More on local features Readings for
CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Lecture 11 Local Features 1 Schedule Last class We started local features Today More on local features Readings for
Scale-space image processing
 Scale-space image processing Corresponding image features can appear at different scales Like shift-invariance, scale-invariance of image processing algorithms is often desirable. Scale-space representation
Scale-space image processing Corresponding image features can appear at different scales Like shift-invariance, scale-invariance of image processing algorithms is often desirable. Scale-space representation
Recognition and Classification in Images and Video
 Recognition and Classification in Images and Video 203.4780 http://www.cs.haifa.ac.il/~rita/visual_recog_course/visual%20recognition%20spring%202014.htm Introduction The course is based on UT-Austin course:
Recognition and Classification in Images and Video 203.4780 http://www.cs.haifa.ac.il/~rita/visual_recog_course/visual%20recognition%20spring%202014.htm Introduction The course is based on UT-Austin course:
Style-aware Mid-level Representation for Discovering Visual Connections in Space and Time
 Style-aware Mid-level Representation for Discovering Visual Connections in Space and Time Experiment presentation for CS3710:Visual Recognition Presenter: Zitao Liu University of Pittsburgh ztliu@cs.pitt.edu
Style-aware Mid-level Representation for Discovering Visual Connections in Space and Time Experiment presentation for CS3710:Visual Recognition Presenter: Zitao Liu University of Pittsburgh ztliu@cs.pitt.edu
Region Moments: Fast invariant descriptors for detecting small image structures
 Region Moments: Fast invariant descriptors for detecting small image structures Gianfranco Doretto Yi Yao Visualization and Computer Vision Lab, GE Global Research, Niskayuna, NY 39 doretto@research.ge.com
Region Moments: Fast invariant descriptors for detecting small image structures Gianfranco Doretto Yi Yao Visualization and Computer Vision Lab, GE Global Research, Niskayuna, NY 39 doretto@research.ge.com
CS 3710: Visual Recognition Describing Images with Features. Adriana Kovashka Department of Computer Science January 8, 2015
 CS 3710: Visual Recognition Describing Images with Features Adriana Kovashka Department of Computer Science January 8, 2015 Plan for Today Presentation assignments + schedule changes Image filtering Feature
CS 3710: Visual Recognition Describing Images with Features Adriana Kovashka Department of Computer Science January 8, 2015 Plan for Today Presentation assignments + schedule changes Image filtering Feature
Comparative study of global invariant. descriptors for object recognition
 Author manuscript, published in "Journal of Electronic Imaging (2008) 1-35" Comparative study of global invariant descriptors for object recognition A. Choksuriwong, B. Emile, C. Rosenberger, H. Laurent
Author manuscript, published in "Journal of Electronic Imaging (2008) 1-35" Comparative study of global invariant descriptors for object recognition A. Choksuriwong, B. Emile, C. Rosenberger, H. Laurent
Lecture 7: Finding Features (part 2/2)
") Lecture 7: Finding Features (part 2/2) Professor Fei- Fei Li Stanford Vision Lab Lecture 7 -! 1 What we will learn today? Local invariant features MoHvaHon Requirements, invariances Keypoint localizahon
Lecture 7: Finding Features (part 2/2) Professor Fei- Fei Li Stanford Vision Lab Lecture 7 -! 1 What we will learn today? Local invariant features MoHvaHon Requirements, invariances Keypoint localizahon
Sparse Kernel Machines - SVM
 Sparse Kernel Machines - SVM Henrik I. Christensen Robotics & Intelligent Machines @ GT Georgia Institute of Technology, Atlanta, GA 30332-0280 hic@cc.gatech.edu Henrik I. Christensen (RIM@GT) Support
Sparse Kernel Machines - SVM Henrik I. Christensen Robotics & Intelligent Machines @ GT Georgia Institute of Technology, Atlanta, GA 30332-0280 hic@cc.gatech.edu Henrik I. Christensen (RIM@GT) Support
Beyond Spatial Pyramids
 Beyond Spatial Pyramids Receptive Field Learning for Pooled Image Features Yangqing Jia 1 Chang Huang 2 Trevor Darrell 1 1 UC Berkeley EECS 2 NEC Labs America Goal coding pooling Bear Analysis of the pooling
Beyond Spatial Pyramids Receptive Field Learning for Pooled Image Features Yangqing Jia 1 Chang Huang 2 Trevor Darrell 1 1 UC Berkeley EECS 2 NEC Labs America Goal coding pooling Bear Analysis of the pooling
Face detection and recognition. Detection Recognition Sally
 Face detection and recognition Detection Recognition Sally Face detection & recognition Viola & Jones detector Available in open CV Face recognition Eigenfaces for face recognition Metric learning identification
Face detection and recognition Detection Recognition Sally Face detection & recognition Viola & Jones detector Available in open CV Face recognition Eigenfaces for face recognition Metric learning identification
Instance-level l recognition. Cordelia Schmid & Josef Sivic INRIA
 nstance-level l recognition Cordelia Schmid & Josef Sivic NRA nstance-level recognition Particular objects and scenes large databases Application Search photos on the web for particular places Find these
nstance-level l recognition Cordelia Schmid & Josef Sivic NRA nstance-level recognition Particular objects and scenes large databases Application Search photos on the web for particular places Find these
A New Shape Adaptation Scheme to Affine Invariant Detector
 KSII ANSACIONS ON INENE AND INFOMAION SYSEMS VO. 4, NO. 6, December 2010 1253 Copyright c 2010 KSII A New Shape Adaptation Scheme to Affine Invariant Detector Congxin iu, Jie Yang, Yue Zhou and Deying
KSII ANSACIONS ON INENE AND INFOMAION SYSEMS VO. 4, NO. 6, December 2010 1253 Copyright c 2010 KSII A New Shape Adaptation Scheme to Affine Invariant Detector Congxin iu, Jie Yang, Yue Zhou and Deying
Instance-level recognition: Local invariant features. Cordelia Schmid INRIA, Grenoble
 nstance-level recognition: ocal invariant features Cordelia Schmid NRA Grenoble Overview ntroduction to local features Harris interest points + SSD ZNCC SFT Scale & affine invariant interest point detectors
nstance-level recognition: ocal invariant features Cordelia Schmid NRA Grenoble Overview ntroduction to local features Harris interest points + SSD ZNCC SFT Scale & affine invariant interest point detectors
SUBJECTIVE EVALUATION OF IMAGE UNDERSTANDING RESULTS
 18th European Signal Processing Conference (EUSIPCO-2010) Aalborg, Denmark, August 23-27, 2010 SUBJECTIVE EVALUATION OF IMAGE UNDERSTANDING RESULTS Baptiste Hemery 1, Hélène Laurent 2, and Christophe Rosenberger
18th European Signal Processing Conference (EUSIPCO-2010) Aalborg, Denmark, August 23-27, 2010 SUBJECTIVE EVALUATION OF IMAGE UNDERSTANDING RESULTS Baptiste Hemery 1, Hélène Laurent 2, and Christophe Rosenberger
CITS 4402 Computer Vision
 CITS 4402 Computer Vision A/Prof Ajmal Mian Adj/A/Prof Mehdi Ravanbakhsh Lecture 06 Object Recognition Objectives To understand the concept of image based object recognition To learn how to match images
CITS 4402 Computer Vision A/Prof Ajmal Mian Adj/A/Prof Mehdi Ravanbakhsh Lecture 06 Object Recognition Objectives To understand the concept of image based object recognition To learn how to match images
SURF Features. Jacky Baltes Dept. of Computer Science University of Manitoba WWW:
 SURF Features Jacky Baltes Dept. of Computer Science University of Manitoba Email: jacky@cs.umanitoba.ca WWW: http://www.cs.umanitoba.ca/~jacky Salient Spatial Features Trying to find interest points Points
SURF Features Jacky Baltes Dept. of Computer Science University of Manitoba Email: jacky@cs.umanitoba.ca WWW: http://www.cs.umanitoba.ca/~jacky Salient Spatial Features Trying to find interest points Points
SCENE CLASSIFICATION USING SPATIAL RELATIONSHIP BETWEEN LOCAL POSTERIOR PROBABILITIES
 SCENE CLASSIFICATION USING SPATIAL RELATIONSHIP BETWEEN LOCAL POSTERIOR PROBABILITIES Tetsu Matsukawa and Takio Kurita Department of Computer Science, University of Tsukuba, Tennodai 1-1-1 Tsukuba, Japan
SCENE CLASSIFICATION USING SPATIAL RELATIONSHIP BETWEEN LOCAL POSTERIOR PROBABILITIES Tetsu Matsukawa and Takio Kurita Department of Computer Science, University of Tsukuba, Tennodai 1-1-1 Tsukuba, Japan
SCENE CLASSIFICATION USING SPATIAL RELATIONSHIP BETWEEN LOCAL POSTERIOR PROBABILITIES
 SCENE CLASSIFICATION USING SPATIAL RELATIONSHIP BETWEEN LOCAL POSTERIOR PROBABILITIES Tetsu Matsukawa and Takio Kurita :Department of Computer Science, University of Tsukuba, Tennodai 1-1-1 Tsukuba, Japan
SCENE CLASSIFICATION USING SPATIAL RELATIONSHIP BETWEEN LOCAL POSTERIOR PROBABILITIES Tetsu Matsukawa and Takio Kurita :Department of Computer Science, University of Tsukuba, Tennodai 1-1-1 Tsukuba, Japan
DYNAMIC TEXTURE RECOGNITION USING ENHANCED LBP FEATURES
 DYNAMIC TEXTURE RECOGNITION USING ENHANCED FEATURES Jianfeng Ren BeingThere Centre Institute of Media Innovation Nanyang Technological University 50 Nanyang Drive, Singapore 637553. Xudong Jiang, Junsong
DYNAMIC TEXTURE RECOGNITION USING ENHANCED FEATURES Jianfeng Ren BeingThere Centre Institute of Media Innovation Nanyang Technological University 50 Nanyang Drive, Singapore 637553. Xudong Jiang, Junsong
Fantope Regularization in Metric Learning
 Fantope Regularization in Metric Learning CVPR 2014 Marc T. Law (LIP6, UPMC), Nicolas Thome (LIP6 - UPMC Sorbonne Universités), Matthieu Cord (LIP6 - UPMC Sorbonne Universités), Paris, France Introduction
Fantope Regularization in Metric Learning CVPR 2014 Marc T. Law (LIP6, UPMC), Nicolas Thome (LIP6 - UPMC Sorbonne Universités), Matthieu Cord (LIP6 - UPMC Sorbonne Universités), Paris, France Introduction
Information Theory in Computer Vision and Pattern Recognition
 Francisco Escolano Pablo Suau Boyan Bonev Information Theory in Computer Vision and Pattern Recognition Foreword by Alan Yuille ~ Springer Contents 1 Introduction...............................................
Francisco Escolano Pablo Suau Boyan Bonev Information Theory in Computer Vision and Pattern Recognition Foreword by Alan Yuille ~ Springer Contents 1 Introduction...............................................
Large-scale classification of traffic signs under real-world conditions
 Large-scale classification of traffic signs under real-world conditions Lykele Hazelhoff a,b, Ivo Creusen a,b, Dennis van de Wouw a,b and Peter H.N. de With a,b a CycloMedia Technology B.V., Achterweg
Large-scale classification of traffic signs under real-world conditions Lykele Hazelhoff a,b, Ivo Creusen a,b, Dennis van de Wouw a,b and Peter H.N. de With a,b a CycloMedia Technology B.V., Achterweg
On the consistency of the SIFT Method
 1 INTRODUCTION 1 On the consistency of the SIFT Method Jean-Michel Morel Guoshen Yu August 11, 2008 Abstract This note is devoted to the mathematical arguments proving that Lowe s Scale-Invariant Feature
1 INTRODUCTION 1 On the consistency of the SIFT Method Jean-Michel Morel Guoshen Yu August 11, 2008 Abstract This note is devoted to the mathematical arguments proving that Lowe s Scale-Invariant Feature
Lie Algebrized Gaussians for Image Representation
 Lie Algebrized Gaussians for Image Representation Liyu Gong, Meng Chen and Chunlong Hu School of CS, Huazhong University of Science and Technology {gongliyu,chenmenghust,huchunlong.hust}@gmail.com Abstract
Lie Algebrized Gaussians for Image Representation Liyu Gong, Meng Chen and Chunlong Hu School of CS, Huazhong University of Science and Technology {gongliyu,chenmenghust,huchunlong.hust}@gmail.com Abstract
OBJECT DETECTION AND RECOGNITION IN DIGITAL IMAGES
 OBJECT DETECTION AND RECOGNITION IN DIGITAL IMAGES THEORY AND PRACTICE Bogustaw Cyganek AGH University of Science and Technology, Poland WILEY A John Wiley &. Sons, Ltd., Publication Contents Preface Acknowledgements
OBJECT DETECTION AND RECOGNITION IN DIGITAL IMAGES THEORY AND PRACTICE Bogustaw Cyganek AGH University of Science and Technology, Poland WILEY A John Wiley &. Sons, Ltd., Publication Contents Preface Acknowledgements
Loss Functions and Optimization. Lecture 3-1
 Lecture 3: Loss Functions and Optimization Lecture 3-1 Administrative Assignment 1 is released: http://cs231n.github.io/assignments2017/assignment1/ Due Thursday April 20, 11:59pm on Canvas (Extending
Lecture 3: Loss Functions and Optimization Lecture 3-1 Administrative Assignment 1 is released: http://cs231n.github.io/assignments2017/assignment1/ Due Thursday April 20, 11:59pm on Canvas (Extending
Object Recognition Using Local Characterisation and Zernike Moments
 Object Recognition Using Local Characterisation and Zernike Moments A. Choksuriwong, H. Laurent, C. Rosenberger, and C. Maaoui Laboratoire Vision et Robotique - UPRES EA 2078, ENSI de Bourges - Université
Object Recognition Using Local Characterisation and Zernike Moments A. Choksuriwong, H. Laurent, C. Rosenberger, and C. Maaoui Laboratoire Vision et Robotique - UPRES EA 2078, ENSI de Bourges - Université
Kronecker Decomposition for Image Classification
 university of innsbruck institute of computer science intelligent and interactive systems Kronecker Decomposition for Image Classification Sabrina Fontanella 1,2, Antonio Rodríguez-Sánchez 1, Justus Piater
university of innsbruck institute of computer science intelligent and interactive systems Kronecker Decomposition for Image Classification Sabrina Fontanella 1,2, Antonio Rodríguez-Sánchez 1, Justus Piater
Hilbert-Huang Transform-based Local Regions Descriptors
 Hilbert-Huang Transform-based Local Regions Descriptors Dongfeng Han, Wenhui Li, Wu Guo Computer Science and Technology, Key Laboratory of Symbol Computation and Knowledge Engineering of the Ministry of
Hilbert-Huang Transform-based Local Regions Descriptors Dongfeng Han, Wenhui Li, Wu Guo Computer Science and Technology, Key Laboratory of Symbol Computation and Knowledge Engineering of the Ministry of
International Journal of Computer Engineering and Applications, Volume XII, Special Issue, August 18, ISSN
 International Journal of Computer Engineering and Applications, Volume XII, Special Issue, August 18, www.ijcea.com ISSN 2321-3469 CONTENT-BASED IMAGE RETRIEVAL USING ZERNIKE MOMENTS AND SURF Priyanka
International Journal of Computer Engineering and Applications, Volume XII, Special Issue, August 18, www.ijcea.com ISSN 2321-3469 CONTENT-BASED IMAGE RETRIEVAL USING ZERNIKE MOMENTS AND SURF Priyanka
Boosting: Algorithms and Applications
 Boosting: Algorithms and Applications Lecture 11, ENGN 4522/6520, Statistical Pattern Recognition and Its Applications in Computer Vision ANU 2 nd Semester, 2008 Chunhua Shen, NICTA/RSISE Boosting Definition
Boosting: Algorithms and Applications Lecture 11, ENGN 4522/6520, Statistical Pattern Recognition and Its Applications in Computer Vision ANU 2 nd Semester, 2008 Chunhua Shen, NICTA/RSISE Boosting Definition
Visual Object Recognition
 Visual Object Recognition Lecture 2: Image Formation Per-Erik Forssén, docent Computer Vision Laboratory Department of Electrical Engineering Linköping University Lecture 2: Image Formation Pin-hole, and
Visual Object Recognition Lecture 2: Image Formation Per-Erik Forssén, docent Computer Vision Laboratory Department of Electrical Engineering Linköping University Lecture 2: Image Formation Pin-hole, and
Analysis on a local approach to 3D object recognition
 Analysis on a local approach to 3D object recognition Elisabetta Delponte, Elise Arnaud, Francesca Odone, and Alessandro Verri DISI - Università degli Studi di Genova - Italy Abstract. We present a method
Analysis on a local approach to 3D object recognition Elisabetta Delponte, Elise Arnaud, Francesca Odone, and Alessandro Verri DISI - Università degli Studi di Genova - Italy Abstract. We present a method
Asaf Bar Zvi Adi Hayat. Semantic Segmentation
 Asaf Bar Zvi Adi Hayat Semantic Segmentation Today s Topics Fully Convolutional Networks (FCN) (CVPR 2015) Conditional Random Fields as Recurrent Neural Networks (ICCV 2015) Gaussian Conditional random
Asaf Bar Zvi Adi Hayat Semantic Segmentation Today s Topics Fully Convolutional Networks (FCN) (CVPR 2015) Conditional Random Fields as Recurrent Neural Networks (ICCV 2015) Gaussian Conditional random
Lecture 13 Visual recognition
 Lecture 13 Visual recognition Announcements Silvio Savarese Lecture 13-20-Feb-14 Lecture 13 Visual recognition Object classification bag of words models Discriminative methods Generative methods Object
Lecture 13 Visual recognition Announcements Silvio Savarese Lecture 13-20-Feb-14 Lecture 13 Visual recognition Object classification bag of words models Discriminative methods Generative methods Object
Detecting Humans via Their Pose
 Detecting Humans via Their Pose Alessandro Bissacco Computer Science Department University of California, Los Angeles Los Angeles, CA 90095 bissacco@cs.ucla.edu Ming-Hsuan Yang Honda Research Institute
Detecting Humans via Their Pose Alessandro Bissacco Computer Science Department University of California, Los Angeles Los Angeles, CA 90095 bissacco@cs.ucla.edu Ming-Hsuan Yang Honda Research Institute
Image Processing 1 (IP1) Bildverarbeitung 1
 Bildverarbeitung 1") MIN-Fakultät Fachbereich Informatik Arbeitsbereich SAV/BV KOGS Image Processing 1 IP1 Bildverarbeitung 1 Lecture : Object Recognition Winter Semester 015/16 Slides: Prof. Bernd Neumann Slightly revised
MIN-Fakultät Fachbereich Informatik Arbeitsbereich SAV/BV KOGS Image Processing 1 IP1 Bildverarbeitung 1 Lecture : Object Recognition Winter Semester 015/16 Slides: Prof. Bernd Neumann Slightly revised
Is the Scale Invariant Feature Transform (SIFT) really Scale Invariant?
 really Scale Invariant?") Is the Scale Invariant Feature Transform (SIFT) really Scale Invariant? Course prepared by: Jean-Michel Morel, Guoshen Yu and Ives Rey Otero October 24, 2010 Abstract This note is devoted to a mathematical
Is the Scale Invariant Feature Transform (SIFT) really Scale Invariant? Course prepared by: Jean-Michel Morel, Guoshen Yu and Ives Rey Otero October 24, 2010 Abstract This note is devoted to a mathematical
Scale & Affine Invariant Interest Point Detectors
 Scale & Affine Invariant Interest Point Detectors KRYSTIAN MIKOLAJCZYK AND CORDELIA SCHMID [2004] Shreyas Saxena Gurkirit Singh 23/11/2012 Introduction We are interested in finding interest points. What
Scale & Affine Invariant Interest Point Detectors KRYSTIAN MIKOLAJCZYK AND CORDELIA SCHMID [2004] Shreyas Saxena Gurkirit Singh 23/11/2012 Introduction We are interested in finding interest points. What
CSC 411: Lecture 03: Linear Classification
 CSC 411: Lecture 03: Linear Classification Richard Zemel, Raquel Urtasun and Sanja Fidler University of Toronto Zemel, Urtasun, Fidler (UofT) CSC 411: 03-Classification 1 / 24 Examples of Problems What
CSC 411: Lecture 03: Linear Classification Richard Zemel, Raquel Urtasun and Sanja Fidler University of Toronto Zemel, Urtasun, Fidler (UofT) CSC 411: 03-Classification 1 / 24 Examples of Problems What