Global Scene Representations. Tilke Judd
|
|
|
- Britney McLaughlin
- 5 years ago
- Views:
Transcription
1 Global Scene Representations Tilke Judd
2 Papers Oliva and Torralba [2001] Fei Fei and Perona [2005] Labzebnik, Schmid and Ponce [2006]
3 Commonalities Goal: Recognize natural scene categories Extract features on images and learn models Test on database of scenes in general, accuracy or generality improves
4 Past theories Scene recognition based on - edges, surfaces, details - successive decision layers of increasing complexity - object recognition
5 But now... Scene recognition may be initiated by low resolution global configuration - enough information about meaning of scene in < 200ms [Potter 1975] - understanding driven from arrangements of simple forms or geons [Biederman 1987] - spatial relationship between blobs of specific size and aspect ratios [Schyns and Oliva 1994, 1997]
6 Modeling the Shape of the Scene: A Hollistic Representation of the Spatial Envelope Aude Oliva and Antonio Torralba 2001

7 Shape of a scene Pose a scene as a SHAPE instead of a collection of objects Show scenes of same category have similar shape or spatial structure [Image from Oliva and Torralba 2001]
8 Spatial Envelope Design experiment to identify meaningful dimensions of scene structure Split 81 pictures into groups then describe them Used words like man-made vs natural open vs closed
9 Spatial Envelope 5 Spatial Envelope Properties - Degree of Naturalness - Degree of Openness - Degree of Roughness - Degree of Expansion - Degree of Ruggedness Goal: to show these 5 qualities adequate to get high level description of scene


10 Modeling Spatial Envelope Introduce 2nd order statistics based on Discrete Fourier Transform Energy Spectrum squared magnitude of FT = distribution of the signal s energy among different spatial frequencies DFT unlocalized dominant structure Spectrogram spatial distribution of spectral information Windowed DFT structural info in spatial arrangement good results more accurate Both are high dimensional representation of scene Reduced by PCA to set of orthogonal functions with decorrelated coefficients

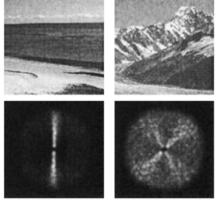
11 Energy Spectrum
12 Mean Spectrogram Structural aspects are modeled by energy spectrum and spectrogram Man made open urban vertical perspective view of streets far view of city center buildings Mean spectrogram from hundreds of same category [Image from Oliva and Torralba 2001]
13 Learning How can Spatial Envelope propertie s be estimated by global spectral features v? Simple linear regression 500 images placed on axis of desired property used for learning regression model parameters d s = amplitude spectrum * Discriminant Spectral Template (DST) Use regression for continuous features and binary features

14 DST show how spectral components of energy spectrum should be weighted example: natural vs man-made white: high degree of naturalness at low diagonal frequencies black: low degree of naturalness at H and V frequencies DST WDST
 Leads to 93.")
15 Naturalness Image Energy Spectrum*DST opponent energy image Man-made Natural Value of naturalness = sum (Energy Spectra * DST) Leads to 93.5% correct classification of 5000 test scenes

16 DST for other properties Natural openness Man-made openness Natural ruggedness Man-made expansion...
17 Categories Have spectral energy model for spatial envelope features Now need mapping of spatial envelope features to categories

18 Categories Shows set of images projected into 2D space corresponding to openness and ruggedness Scenes close in the space have similar category membership
19 Categories Projected typical exemplars of categories (coasts, mountains, tall buildings etc) into spatial envelope space to make database classification performed by K nearest neighbors classifier: - given new scene picture K-NN looks for K nearest neighbors of image within the labeled training dataset - these correspond to images with closest spatial envelope properties - category comes from most represented category of k images
20 Accuracy Classification is on average 89% with WDST (86% with DST)
21 Accuracy H - Highway S - Street C - Coast T - Tall buildings different categories lie on different locations of the spatial envelope axes
22 Summary find semantically meaningful spatial envelope properties show spatial properties strongly correlated with second order statistics DST and spatial arrangement of structures WDST spatial properties can be used to infer scene category
23 Summary find semantically meaningful spatial envelope properties show spatial properties strongly correlated with second order statistics DST and spatial arrangement of structures WDST spatial properties can be used to infer scene category
24 A Bayesian Heirarchical Model for Learning Natural Scene Categories Li Fei Fei and Pietro Perona 2005
25 Overview Goal: Recognize natural scene categories Insight: use intermediate representation before classifying scenes - labeled wrt global or local properties - Oliva and Torralba - spatial envelope properties hand labeled by human observers Problem with human labeling: hours of manual labor and suboptimal labeling Contribution: unsupervised learning of themes
26 Overview Inspiration: work on Texture models - first learn dictionary of textons - each category of texture captures a specific distribution of textons - intermediate themes ~ texture descriptions Approach: local regions clustered into themes, then into categories. Probability distribution learnt automatically, bypassing human annotation
27 Baysian Model Learn Baysian Model - requires learning joint probability of unknown variables for new image, compute probability of each category given learned parameters label is the category that gives the largest likelihood of the image lots more math in the paper
28 Features previous model used global features (frequencies, edges, color histograms) They use LOCAL REGIONS Tried 4 ways of extracting patches Evenly sampled dense grid spaced 10x10 randomly sized patch between 10-30pxls

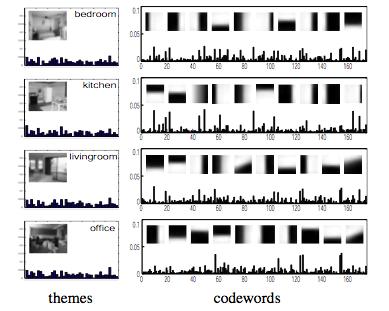
29 Codebook Codewords obtained from 650 training examples learn codebook through k-means clustering. codewords are center of cluster best results when using 174 codewords Shown in descending order according to size of membership. correspond to simple orientations, illumination patterns similar to ones that early human visual system responds to.
30 Testing Oliva and Torralba dataset with 5 new categories = 13 category dataset Model trained on 100 images of each category (10 mins to train all 13) New image labeled with category that gives highest likelihood probability

31 Results Perfect confusion table would be straight diagonal Chance would be 7.7% recognition Results average 64% recognition Recognition in top two choices 82% Highest block of errors on indoor scenes
 and")
32 Results A look at the internal structure Shows themes that are learned and corresponding codewords Some themes have semantic meaning: foliage (20, 3) and branch (19)

33 Results Indoor scenes
34 Summary Automatically learn intermediate codewords and themes using Baysian Model with no human annotation Obtain 64% accuracy of categorization on 15 category database, 74% accuracy on 4 categories
35 Big Picture so far Oliva and Torralba [2001] FeiFei and Perona [2005] # of categories 8 13 # of intermediate themes training # per category training requirements 6 Spatial Envelope Properties 40 Themes human annotation of 6 properties for thousands images unsupervised performance 89% 76% kind of features global statistics (energy spectra & spectrogram) Local patches
36 Beyond Bags of Features: Spatial Pyramid Matching for Recognizing Natural Scene Categories Labzebnik, Schmid, Ponce 2006
37 Overview Goal: Recognize photographs as a scene (forest, ocean) or as containing an object (bike, person) Previous methods: - Bag of features (disregard spatial information) - Generative part models and geometric correspondence (computational expensive) Novel Approach: - repeatedly subdivide image - compute histograms of local features over subregions - Adapted from Pyramid Matching [Grauman and Darrell]
38 Spatial Pyramid Matching Constructing a 3-level pyramid. - Subdivide image at three levels of resolution. - For each level and each feature channel, count # features in each bin. - The spatial histogram is a weighted sum of these values. - Weight of match at each level is inversely proportional to size of bin penalize matches in larger cells highly weight matches in smaller cells
39 Features weak features - oriented edge points at 2 scales 8 orientations. - similar to gist strong features - SIFT descriptors of 16x16 patches over dense grid - cluster patches to form M=200 or M=400 large visual vocabulary
40 Testing 15 Category dataset - Scenes [Oliva &Torralba and FeiFei and Perona] Caltech objects Graz - objects
41 Results on Scenes What does chart show? Multilevel pyramid setup better than single level For strong features, single level performance goes down from L=2 to L=3. Pyramid too finely subdivided. Even so, pyramid scheme stays same. Advantage: Pyramid combines multiple resolutions in principled fashion -- robust to failures at individual levels Strong features better than weak. But M=200 similar to M=400. Pyramid scheme more important than large vocabulary.

42 Results on Scenes indoor scenes coast and open country

43 Results on Scenes Retrieval from the scene category database Spatial pyramid scheme successful at finding major elements, blobs, directionality of lines Also preserves high frequency detail (see kitchen)


44 Results on Caltech 101 Will this method work on OBJECTS? This outperforms orderless methods and geometric correspondence methods

45 Results on Graz Will this method work on OBJECTS with lots of clutter? Has images of bikes, persons, and backgrounds. Images vary greatly within one category Heavy clutter and pose changes
46 Summary Approach: repeatedly subdivide image and computing histograms of image features over subregions. Shown good results on 3 datasets simple global construction
47 Big Picture Oliva and Torralba [2001] FeiFei and Perona [2005] Labzebnik et al.[2006] # of categories # of intermediate themes 6 Spatial Envelope Properties 40 Themes M=200 strong feature clusters training # per category NA? training requirements human annotation of 6 properties for thousands images unsupervised unsupervised? performance 89% 76% 81% (on all 15 cat.) kind of features global statistics (energy spectra & spectrogram) Local patches weak oriented filters strong SIFT features what is novel can use global features for recognition human annotation not needed spatial pyramid scheme robust to different resolutions * Add object detection
48 Conclusion Results underscore surprising power of global statistics for scene categorization and even object recognition Can be used as context modules within larger object recognition systems
Distinguish between different types of scenes. Matching human perception Understanding the environment
 Scene Recognition Adriana Kovashka UTCS, PhD student Problem Statement Distinguish between different types of scenes Applications Matching human perception Understanding the environment Indexing of images
Scene Recognition Adriana Kovashka UTCS, PhD student Problem Statement Distinguish between different types of scenes Applications Matching human perception Understanding the environment Indexing of images
Kernel Density Topic Models: Visual Topics Without Visual Words
 Kernel Density Topic Models: Visual Topics Without Visual Words Konstantinos Rematas K.U. Leuven ESAT-iMinds krematas@esat.kuleuven.be Mario Fritz Max Planck Institute for Informatics mfrtiz@mpi-inf.mpg.de
Kernel Density Topic Models: Visual Topics Without Visual Words Konstantinos Rematas K.U. Leuven ESAT-iMinds krematas@esat.kuleuven.be Mario Fritz Max Planck Institute for Informatics mfrtiz@mpi-inf.mpg.de
CS 3710: Visual Recognition Describing Images with Features. Adriana Kovashka Department of Computer Science January 8, 2015
 CS 3710: Visual Recognition Describing Images with Features Adriana Kovashka Department of Computer Science January 8, 2015 Plan for Today Presentation assignments + schedule changes Image filtering Feature
CS 3710: Visual Recognition Describing Images with Features Adriana Kovashka Department of Computer Science January 8, 2015 Plan for Today Presentation assignments + schedule changes Image filtering Feature
Lecture 13 Visual recognition
 Lecture 13 Visual recognition Announcements Silvio Savarese Lecture 13-20-Feb-14 Lecture 13 Visual recognition Object classification bag of words models Discriminative methods Generative methods Object
Lecture 13 Visual recognition Announcements Silvio Savarese Lecture 13-20-Feb-14 Lecture 13 Visual recognition Object classification bag of words models Discriminative methods Generative methods Object
Modeling Complex Temporal Composition of Actionlets for Activity Prediction
 Modeling Complex Temporal Composition of Actionlets for Activity Prediction ECCV 2012 Activity Recognition Reading Group Framework of activity prediction What is an Actionlet To segment a long sequence
Modeling Complex Temporal Composition of Actionlets for Activity Prediction ECCV 2012 Activity Recognition Reading Group Framework of activity prediction What is an Actionlet To segment a long sequence
CITS 4402 Computer Vision
 CITS 4402 Computer Vision A/Prof Ajmal Mian Adj/A/Prof Mehdi Ravanbakhsh Lecture 06 Object Recognition Objectives To understand the concept of image based object recognition To learn how to match images
CITS 4402 Computer Vision A/Prof Ajmal Mian Adj/A/Prof Mehdi Ravanbakhsh Lecture 06 Object Recognition Objectives To understand the concept of image based object recognition To learn how to match images
Urban land use information retrieval based on scene classification of Google Street View images
 Urban land use information retrieval based on scene classification of Google Street View images Xiaojiang Li 1, Chuanrong Zhang 1 1 Department of Geography, University of Connecticut, Storrs Email: {xiaojiang.li;chuanrong.zhang}@uconn.edu
Urban land use information retrieval based on scene classification of Google Street View images Xiaojiang Li 1, Chuanrong Zhang 1 1 Department of Geography, University of Connecticut, Storrs Email: {xiaojiang.li;chuanrong.zhang}@uconn.edu
Chapter 2. Semantic Image Representation
 Chapter 2 Semantic Image Representation 13 14 In this chapter we first present a review of the existing solutions to the problem of image retrieval and scene classification followed by a brief review of
Chapter 2 Semantic Image Representation 13 14 In this chapter we first present a review of the existing solutions to the problem of image retrieval and scene classification followed by a brief review of
Shared Segmentation of Natural Scenes. Dependent Pitman-Yor Processes
 Shared Segmentation of Natural Scenes using Dependent Pitman-Yor Processes Erik Sudderth & Michael Jordan University of California, Berkeley Parsing Visual Scenes sky skyscraper sky dome buildings trees
Shared Segmentation of Natural Scenes using Dependent Pitman-Yor Processes Erik Sudderth & Michael Jordan University of California, Berkeley Parsing Visual Scenes sky skyscraper sky dome buildings trees
Kronecker Decomposition for Image Classification
 university of innsbruck institute of computer science intelligent and interactive systems Kronecker Decomposition for Image Classification Sabrina Fontanella 1,2, Antonio Rodríguez-Sánchez 1, Justus Piater
university of innsbruck institute of computer science intelligent and interactive systems Kronecker Decomposition for Image Classification Sabrina Fontanella 1,2, Antonio Rodríguez-Sánchez 1, Justus Piater
Pedestrian Density Estimation by a Weighted Bag of Visual Words Model
 Pedestrian Density Estimation by a Weighted Bag of Visual Words Model Shilin Zhang and Xunyuan Zhang image representation termed bag of visual words integrating weighting scheme and spatial pyramid co-occurrence,
Pedestrian Density Estimation by a Weighted Bag of Visual Words Model Shilin Zhang and Xunyuan Zhang image representation termed bag of visual words integrating weighting scheme and spatial pyramid co-occurrence,
Achieving scale covariance
 Achieving scale covariance Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region size that is covariant
Achieving scale covariance Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region size that is covariant
Clustering with k-means and Gaussian mixture distributions
 Clustering with k-means and Gaussian mixture distributions Machine Learning and Category Representation 2012-2013 Jakob Verbeek, ovember 23, 2012 Course website: http://lear.inrialpes.fr/~verbeek/mlcr.12.13
Clustering with k-means and Gaussian mixture distributions Machine Learning and Category Representation 2012-2013 Jakob Verbeek, ovember 23, 2012 Course website: http://lear.inrialpes.fr/~verbeek/mlcr.12.13
LoG Blob Finding and Scale. Scale Selection. Blobs (and scale selection) Achieving scale covariance. Blob detection in 2D. Blob detection in 2D
 Achieving scale covariance. Blob detection in 2D. Blob detection in 2D") Achieving scale covariance Blobs (and scale selection) Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region
Achieving scale covariance Blobs (and scale selection) Goal: independently detect corresponding regions in scaled versions of the same image Need scale selection mechanism for finding characteristic region
Unsupervised Learning of Discrimina4ve Rela4ve Visual A9ributes
 Unsupervised Learning of Discrimina4ve Rela4ve Visual A9ributes Shugao Ma, Stan Sclaroff, Nazli Ikizler- Cinbis * Department of Computer Science, Boston University * Department of Computer Engineering,
Unsupervised Learning of Discrimina4ve Rela4ve Visual A9ributes Shugao Ma, Stan Sclaroff, Nazli Ikizler- Cinbis * Department of Computer Science, Boston University * Department of Computer Engineering,
Wavelet-based Salient Points with Scale Information for Classification
 Wavelet-based Salient Points with Scale Information for Classification Alexandra Teynor and Hans Burkhardt Department of Computer Science, Albert-Ludwigs-Universität Freiburg, Germany {teynor, Hans.Burkhardt}@informatik.uni-freiburg.de
Wavelet-based Salient Points with Scale Information for Classification Alexandra Teynor and Hans Burkhardt Department of Computer Science, Albert-Ludwigs-Universität Freiburg, Germany {teynor, Hans.Burkhardt}@informatik.uni-freiburg.de
Corners, Blobs & Descriptors. With slides from S. Lazebnik & S. Seitz, D. Lowe, A. Efros
 Corners, Blobs & Descriptors With slides from S. Lazebnik & S. Seitz, D. Lowe, A. Efros Motivation: Build a Panorama M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 How do we build panorama?
Corners, Blobs & Descriptors With slides from S. Lazebnik & S. Seitz, D. Lowe, A. Efros Motivation: Build a Panorama M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 How do we build panorama?
Loss Functions and Optimization. Lecture 3-1
 Lecture 3: Loss Functions and Optimization Lecture 3-1 Administrative Assignment 1 is released: http://cs231n.github.io/assignments2017/assignment1/ Due Thursday April 20, 11:59pm on Canvas (Extending
Lecture 3: Loss Functions and Optimization Lecture 3-1 Administrative Assignment 1 is released: http://cs231n.github.io/assignments2017/assignment1/ Due Thursday April 20, 11:59pm on Canvas (Extending
SCENE CLASSIFICATION USING SPATIAL RELATIONSHIP BETWEEN LOCAL POSTERIOR PROBABILITIES
 SCENE CLASSIFICATION USING SPATIAL RELATIONSHIP BETWEEN LOCAL POSTERIOR PROBABILITIES Tetsu Matsukawa and Takio Kurita Department of Computer Science, University of Tsukuba, Tennodai 1-1-1 Tsukuba, Japan
SCENE CLASSIFICATION USING SPATIAL RELATIONSHIP BETWEEN LOCAL POSTERIOR PROBABILITIES Tetsu Matsukawa and Takio Kurita Department of Computer Science, University of Tsukuba, Tennodai 1-1-1 Tsukuba, Japan
Fantope Regularization in Metric Learning
 Fantope Regularization in Metric Learning CVPR 2014 Marc T. Law (LIP6, UPMC), Nicolas Thome (LIP6 - UPMC Sorbonne Universités), Matthieu Cord (LIP6 - UPMC Sorbonne Universités), Paris, France Introduction
Fantope Regularization in Metric Learning CVPR 2014 Marc T. Law (LIP6, UPMC), Nicolas Thome (LIP6 - UPMC Sorbonne Universités), Matthieu Cord (LIP6 - UPMC Sorbonne Universités), Paris, France Introduction
SCENE CLASSIFICATION USING SPATIAL RELATIONSHIP BETWEEN LOCAL POSTERIOR PROBABILITIES
 SCENE CLASSIFICATION USING SPATIAL RELATIONSHIP BETWEEN LOCAL POSTERIOR PROBABILITIES Tetsu Matsukawa and Takio Kurita :Department of Computer Science, University of Tsukuba, Tennodai 1-1-1 Tsukuba, Japan
SCENE CLASSIFICATION USING SPATIAL RELATIONSHIP BETWEEN LOCAL POSTERIOR PROBABILITIES Tetsu Matsukawa and Takio Kurita :Department of Computer Science, University of Tsukuba, Tennodai 1-1-1 Tsukuba, Japan
The state of the art and beyond
 Feature Detectors and Descriptors The state of the art and beyond Local covariant detectors and descriptors have been successful in many applications Registration Stereo vision Motion estimation Matching
Feature Detectors and Descriptors The state of the art and beyond Local covariant detectors and descriptors have been successful in many applications Registration Stereo vision Motion estimation Matching
Photo Tourism and im2gps: 3D Reconstruction and Geolocation of Internet Photo Collections Part II
 Photo Tourism and im2gps: 3D Reconstruction and Geolocation of Internet Photo Collections Part II Noah Snavely Cornell James Hays CMU MIT (Fall 2009) Brown (Spring 2010 ) Complexity of the Visual World
Photo Tourism and im2gps: 3D Reconstruction and Geolocation of Internet Photo Collections Part II Noah Snavely Cornell James Hays CMU MIT (Fall 2009) Brown (Spring 2010 ) Complexity of the Visual World
Beyond Spatial Pyramids
 Beyond Spatial Pyramids Receptive Field Learning for Pooled Image Features Yangqing Jia 1 Chang Huang 2 Trevor Darrell 1 1 UC Berkeley EECS 2 NEC Labs America Goal coding pooling Bear Analysis of the pooling
Beyond Spatial Pyramids Receptive Field Learning for Pooled Image Features Yangqing Jia 1 Chang Huang 2 Trevor Darrell 1 1 UC Berkeley EECS 2 NEC Labs America Goal coding pooling Bear Analysis of the pooling
Image Analysis. PCA and Eigenfaces
 Image Analysis PCA and Eigenfaces Christophoros Nikou cnikou@cs.uoi.gr Images taken from: D. Forsyth and J. Ponce. Computer Vision: A Modern Approach, Prentice Hall, 2003. Computer Vision course by Svetlana
Image Analysis PCA and Eigenfaces Christophoros Nikou cnikou@cs.uoi.gr Images taken from: D. Forsyth and J. Ponce. Computer Vision: A Modern Approach, Prentice Hall, 2003. Computer Vision course by Svetlana
Sound Recognition in Mixtures
 Sound Recognition in Mixtures Juhan Nam, Gautham J. Mysore 2, and Paris Smaragdis 2,3 Center for Computer Research in Music and Acoustics, Stanford University, 2 Advanced Technology Labs, Adobe Systems
Sound Recognition in Mixtures Juhan Nam, Gautham J. Mysore 2, and Paris Smaragdis 2,3 Center for Computer Research in Music and Acoustics, Stanford University, 2 Advanced Technology Labs, Adobe Systems
Clustering with k-means and Gaussian mixture distributions
 Clustering with k-means and Gaussian mixture distributions Machine Learning and Category Representation 2014-2015 Jakob Verbeek, ovember 21, 2014 Course website: http://lear.inrialpes.fr/~verbeek/mlcr.14.15
Clustering with k-means and Gaussian mixture distributions Machine Learning and Category Representation 2014-2015 Jakob Verbeek, ovember 21, 2014 Course website: http://lear.inrialpes.fr/~verbeek/mlcr.14.15
Properties of detectors Edge detectors Harris DoG Properties of descriptors SIFT HOG Shape context
 Lecture 10 Detectors and descriptors Properties of detectors Edge detectors Harris DoG Properties of descriptors SIFT HOG Shape context Silvio Savarese Lecture 10-16-Feb-15 From the 3D to 2D & vice versa
Lecture 10 Detectors and descriptors Properties of detectors Edge detectors Harris DoG Properties of descriptors SIFT HOG Shape context Silvio Savarese Lecture 10-16-Feb-15 From the 3D to 2D & vice versa
Probabilistic Latent Semantic Analysis
 Probabilistic Latent Semantic Analysis Dan Oneaţă 1 Introduction Probabilistic Latent Semantic Analysis (plsa) is a technique from the category of topic models. Its main goal is to model cooccurrence information
Probabilistic Latent Semantic Analysis Dan Oneaţă 1 Introduction Probabilistic Latent Semantic Analysis (plsa) is a technique from the category of topic models. Its main goal is to model cooccurrence information
38 1 Vol. 38, No ACTA AUTOMATICA SINICA January, Bag-of-phrases.. Image Representation Using Bag-of-phrases
 38 1 Vol. 38, No. 1 2012 1 ACTA AUTOMATICA SINICA January, 2012 Bag-of-phrases 1, 2 1 1 1, Bag-of-words,,, Bag-of-words, Bag-of-phrases, Bag-of-words DOI,, Bag-of-words, Bag-of-phrases, SIFT 10.3724/SP.J.1004.2012.00046
38 1 Vol. 38, No. 1 2012 1 ACTA AUTOMATICA SINICA January, 2012 Bag-of-phrases 1, 2 1 1 1, Bag-of-words,,, Bag-of-words, Bag-of-phrases, Bag-of-words DOI,, Bag-of-words, Bag-of-phrases, SIFT 10.3724/SP.J.1004.2012.00046
Anticipating Visual Representations from Unlabeled Data. Carl Vondrick, Hamed Pirsiavash, Antonio Torralba
 Anticipating Visual Representations from Unlabeled Data Carl Vondrick, Hamed Pirsiavash, Antonio Torralba Overview Problem Key Insight Methods Experiments Problem: Predict future actions and objects Image
Anticipating Visual Representations from Unlabeled Data Carl Vondrick, Hamed Pirsiavash, Antonio Torralba Overview Problem Key Insight Methods Experiments Problem: Predict future actions and objects Image
EE 6882 Visual Search Engine
 EE 6882 Visual Search Engine Prof. Shih Fu Chang, Feb. 13 th 2012 Lecture #4 Local Feature Matching Bag of Word image representation: coding and pooling (Many slides from A. Efors, W. Freeman, C. Kambhamettu,
EE 6882 Visual Search Engine Prof. Shih Fu Chang, Feb. 13 th 2012 Lecture #4 Local Feature Matching Bag of Word image representation: coding and pooling (Many slides from A. Efors, W. Freeman, C. Kambhamettu,
Feature detectors and descriptors. Fei-Fei Li
 Feature detectors and descriptors Fei-Fei Li Feature Detection e.g. DoG detected points (~300) coordinates, neighbourhoods Feature Description e.g. SIFT local descriptors (invariant) vectors database of
Feature detectors and descriptors Fei-Fei Li Feature Detection e.g. DoG detected points (~300) coordinates, neighbourhoods Feature Description e.g. SIFT local descriptors (invariant) vectors database of
Clustering with k-means and Gaussian mixture distributions
 Clustering with k-means and Gaussian mixture distributions Machine Learning and Object Recognition 2017-2018 Jakob Verbeek Clustering Finding a group structure in the data Data in one cluster similar to
Clustering with k-means and Gaussian mixture distributions Machine Learning and Object Recognition 2017-2018 Jakob Verbeek Clustering Finding a group structure in the data Data in one cluster similar to
Metric Embedding of Task-Specific Similarity. joint work with Trevor Darrell (MIT)
") Metric Embedding of Task-Specific Similarity Greg Shakhnarovich Brown University joint work with Trevor Darrell (MIT) August 9, 2006 Task-specific similarity A toy example: Task-specific similarity A toy
Metric Embedding of Task-Specific Similarity Greg Shakhnarovich Brown University joint work with Trevor Darrell (MIT) August 9, 2006 Task-specific similarity A toy example: Task-specific similarity A toy
Feature detectors and descriptors. Fei-Fei Li
 Feature detectors and descriptors Fei-Fei Li Feature Detection e.g. DoG detected points (~300) coordinates, neighbourhoods Feature Description e.g. SIFT local descriptors (invariant) vectors database of
Feature detectors and descriptors Fei-Fei Li Feature Detection e.g. DoG detected points (~300) coordinates, neighbourhoods Feature Description e.g. SIFT local descriptors (invariant) vectors database of
Analysis on a local approach to 3D object recognition
 Analysis on a local approach to 3D object recognition Elisabetta Delponte, Elise Arnaud, Francesca Odone, and Alessandro Verri DISI - Università degli Studi di Genova - Italy Abstract. We present a method
Analysis on a local approach to 3D object recognition Elisabetta Delponte, Elise Arnaud, Francesca Odone, and Alessandro Verri DISI - Università degli Studi di Genova - Italy Abstract. We present a method
Loss Functions and Optimization. Lecture 3-1
 Lecture 3: Loss Functions and Optimization Lecture 3-1 Administrative: Live Questions We ll use Zoom to take questions from remote students live-streaming the lecture Check Piazza for instructions and
Lecture 3: Loss Functions and Optimization Lecture 3-1 Administrative: Live Questions We ll use Zoom to take questions from remote students live-streaming the lecture Check Piazza for instructions and
Instance-level recognition: Local invariant features. Cordelia Schmid INRIA, Grenoble
 nstance-level recognition: ocal invariant features Cordelia Schmid NRA Grenoble Overview ntroduction to local features Harris interest points + SSD ZNCC SFT Scale & affine invariant interest point detectors
nstance-level recognition: ocal invariant features Cordelia Schmid NRA Grenoble Overview ntroduction to local features Harris interest points + SSD ZNCC SFT Scale & affine invariant interest point detectors
Maximally Stable Local Description for Scale Selection
 Maximally Stable Local Description for Scale Selection Gyuri Dorkó and Cordelia Schmid INRIA Rhône-Alpes, 655 Avenue de l Europe, 38334 Montbonnot, France {gyuri.dorko,cordelia.schmid}@inrialpes.fr Abstract.
Maximally Stable Local Description for Scale Selection Gyuri Dorkó and Cordelia Schmid INRIA Rhône-Alpes, 655 Avenue de l Europe, 38334 Montbonnot, France {gyuri.dorko,cordelia.schmid}@inrialpes.fr Abstract.
Large-scale classification of traffic signs under real-world conditions
 Large-scale classification of traffic signs under real-world conditions Lykele Hazelhoff a,b, Ivo Creusen a,b, Dennis van de Wouw a,b and Peter H.N. de With a,b a CycloMedia Technology B.V., Achterweg
Large-scale classification of traffic signs under real-world conditions Lykele Hazelhoff a,b, Ivo Creusen a,b, Dennis van de Wouw a,b and Peter H.N. de With a,b a CycloMedia Technology B.V., Achterweg
Face detection and recognition. Detection Recognition Sally
 Face detection and recognition Detection Recognition Sally Face detection & recognition Viola & Jones detector Available in open CV Face recognition Eigenfaces for face recognition Metric learning identification
Face detection and recognition Detection Recognition Sally Face detection & recognition Viola & Jones detector Available in open CV Face recognition Eigenfaces for face recognition Metric learning identification
Nonlinear Classification
 Nonlinear Classification INFO-4604, Applied Machine Learning University of Colorado Boulder October 5-10, 2017 Prof. Michael Paul Linear Classification Most classifiers we ve seen use linear functions
Nonlinear Classification INFO-4604, Applied Machine Learning University of Colorado Boulder October 5-10, 2017 Prof. Michael Paul Linear Classification Most classifiers we ve seen use linear functions
Semi-Supervised Learning in Gigantic Image Collections. Rob Fergus (New York University) Yair Weiss (Hebrew University) Antonio Torralba (MIT)
 Yair Weiss (Hebrew University) Antonio Torralba (MIT)") Semi-Supervised Learning in Gigantic Image Collections Rob Fergus (New York University) Yair Weiss (Hebrew University) Antonio Torralba (MIT) Gigantic Image Collections What does the world look like? High
Semi-Supervised Learning in Gigantic Image Collections Rob Fergus (New York University) Yair Weiss (Hebrew University) Antonio Torralba (MIT) Gigantic Image Collections What does the world look like? High
ECE 592 Topics in Data Science
 ECE 592 Topics in Data Science Final Fall 2017 December 11, 2017 Please remember to justify your answers carefully, and to staple your test sheet and answers together before submitting. Name: Student ID:
ECE 592 Topics in Data Science Final Fall 2017 December 11, 2017 Please remember to justify your answers carefully, and to staple your test sheet and answers together before submitting. Name: Student ID:
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely Lecture 5: Feature descriptors and matching Szeliski: 4.1 Reading Announcements Project 1 Artifacts due tomorrow, Friday 2/17, at 11:59pm Project 2 will be released
CS5670: Computer Vision Noah Snavely Lecture 5: Feature descriptors and matching Szeliski: 4.1 Reading Announcements Project 1 Artifacts due tomorrow, Friday 2/17, at 11:59pm Project 2 will be released
Pattern recognition. "To understand is to perceive patterns" Sir Isaiah Berlin, Russian philosopher
 Pattern recognition "To understand is to perceive patterns" Sir Isaiah Berlin, Russian philosopher The more relevant patterns at your disposal, the better your decisions will be. This is hopeful news to
Pattern recognition "To understand is to perceive patterns" Sir Isaiah Berlin, Russian philosopher The more relevant patterns at your disposal, the better your decisions will be. This is hopeful news to
Compressed Fisher vectors for LSVR
 XRCE@ILSVRC2011 Compressed Fisher vectors for LSVR Florent Perronnin and Jorge Sánchez* Xerox Research Centre Europe (XRCE) *Now with CIII, Cordoba University, Argentina Our system in a nutshell High-dimensional
XRCE@ILSVRC2011 Compressed Fisher vectors for LSVR Florent Perronnin and Jorge Sánchez* Xerox Research Centre Europe (XRCE) *Now with CIII, Cordoba University, Argentina Our system in a nutshell High-dimensional
Human Action Recognition under Log-Euclidean Riemannian Metric
 Human Action Recognition under Log-Euclidean Riemannian Metric Chunfeng Yuan, Weiming Hu, Xi Li, Stephen Maybank 2, Guan Luo, National Laboratory of Pattern Recognition, Institute of Automation, CAS, Beijing,
Human Action Recognition under Log-Euclidean Riemannian Metric Chunfeng Yuan, Weiming Hu, Xi Li, Stephen Maybank 2, Guan Luo, National Laboratory of Pattern Recognition, Institute of Automation, CAS, Beijing,
Machine learning comes from Bayesian decision theory in statistics. There we want to minimize the expected value of the loss function.
 Bayesian learning: Machine learning comes from Bayesian decision theory in statistics. There we want to minimize the expected value of the loss function. Let y be the true label and y be the predicted
Bayesian learning: Machine learning comes from Bayesian decision theory in statistics. There we want to minimize the expected value of the loss function. Let y be the true label and y be the predicted
Anomaly Detection for the CERN Large Hadron Collider injection magnets
 Anomaly Detection for the CERN Large Hadron Collider injection magnets Armin Halilovic KU Leuven - Department of Computer Science In cooperation with CERN 2018-07-27 0 Outline 1 Context 2 Data 3 Preprocessing
Anomaly Detection for the CERN Large Hadron Collider injection magnets Armin Halilovic KU Leuven - Department of Computer Science In cooperation with CERN 2018-07-27 0 Outline 1 Context 2 Data 3 Preprocessing
L11: Pattern recognition principles
 L11: Pattern recognition principles Bayesian decision theory Statistical classifiers Dimensionality reduction Clustering This lecture is partly based on [Huang, Acero and Hon, 2001, ch. 4] Introduction
L11: Pattern recognition principles Bayesian decision theory Statistical classifiers Dimensionality reduction Clustering This lecture is partly based on [Huang, Acero and Hon, 2001, ch. 4] Introduction
Edges and Scale. Image Features. Detecting edges. Origin of Edges. Solution: smooth first. Effects of noise
 Edges and Scale Image Features From Sandlot Science Slides revised from S. Seitz, R. Szeliski, S. Lazebnik, etc. Origin of Edges surface normal discontinuity depth discontinuity surface color discontinuity
Edges and Scale Image Features From Sandlot Science Slides revised from S. Seitz, R. Szeliski, S. Lazebnik, etc. Origin of Edges surface normal discontinuity depth discontinuity surface color discontinuity
Riemannian Metric Learning for Symmetric Positive Definite Matrices
 CMSC 88J: Linear Subspaces and Manifolds for Computer Vision and Machine Learning Riemannian Metric Learning for Symmetric Positive Definite Matrices Raviteja Vemulapalli Guide: Professor David W. Jacobs
CMSC 88J: Linear Subspaces and Manifolds for Computer Vision and Machine Learning Riemannian Metric Learning for Symmetric Positive Definite Matrices Raviteja Vemulapalli Guide: Professor David W. Jacobs
Chemometrics: Classification of spectra
 Chemometrics: Classification of spectra Vladimir Bochko Jarmo Alander University of Vaasa November 1, 2010 Vladimir Bochko Chemometrics: Classification 1/36 Contents Terminology Introduction Big picture
Chemometrics: Classification of spectra Vladimir Bochko Jarmo Alander University of Vaasa November 1, 2010 Vladimir Bochko Chemometrics: Classification 1/36 Contents Terminology Introduction Big picture
Kai Yu NEC Laboratories America, Cupertino, California, USA
 Kai Yu NEC Laboratories America, Cupertino, California, USA Joint work with Jinjun Wang, Fengjun Lv, Wei Xu, Yihong Gong Xi Zhou, Jianchao Yang, Thomas Huang, Tong Zhang Chen Wu NEC Laboratories America
Kai Yu NEC Laboratories America, Cupertino, California, USA Joint work with Jinjun Wang, Fengjun Lv, Wei Xu, Yihong Gong Xi Zhou, Jianchao Yang, Thomas Huang, Tong Zhang Chen Wu NEC Laboratories America
Naval Air Warfare Center Weapons Division China Lake, CA. Automatic Target Recognition via Sparse Representations
 Naval Air Warfare Center Weapons Division China Lake, CA. Automatic Target Recognition via Sparse Representations Outline Research objective / ATR challenges Background on Compressed Sensing (CS) ATR in
Naval Air Warfare Center Weapons Division China Lake, CA. Automatic Target Recognition via Sparse Representations Outline Research objective / ATR challenges Background on Compressed Sensing (CS) ATR in
CSE 473/573 Computer Vision and Image Processing (CVIP)
") CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Lecture 11 Local Features 1 Schedule Last class We started local features Today More on local features Readings for
CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Lecture 11 Local Features 1 Schedule Last class We started local features Today More on local features Readings for
TRAFFIC SCENE RECOGNITION BASED ON DEEP CNN AND VLAD SPATIAL PYRAMIDS
 TRAFFIC SCENE RECOGNITION BASED ON DEEP CNN AND VLAD SPATIAL PYRAMIDS FANG-YU WU 1, SHI-YANG YAN 1, JEREMY S. SMITH 2, BAI-LING ZHANG 1 1 Department of Computer Science and Software Engineering, Xi an
TRAFFIC SCENE RECOGNITION BASED ON DEEP CNN AND VLAD SPATIAL PYRAMIDS FANG-YU WU 1, SHI-YANG YAN 1, JEREMY S. SMITH 2, BAI-LING ZHANG 1 1 Department of Computer Science and Software Engineering, Xi an
ECE 521. Lecture 11 (not on midterm material) 13 February K-means clustering, Dimensionality reduction
 13 February K-means clustering, Dimensionality reduction") ECE 521 Lecture 11 (not on midterm material) 13 February 2017 K-means clustering, Dimensionality reduction With thanks to Ruslan Salakhutdinov for an earlier version of the slides Overview K-means clustering
ECE 521 Lecture 11 (not on midterm material) 13 February 2017 K-means clustering, Dimensionality reduction With thanks to Ruslan Salakhutdinov for an earlier version of the slides Overview K-means clustering
Be able to define the following terms and answer basic questions about them:
 CS440/ECE448 Fall 2016 Final Review Be able to define the following terms and answer basic questions about them: Probability o Random variables o Axioms of probability o Joint, marginal, conditional probability
CS440/ECE448 Fall 2016 Final Review Be able to define the following terms and answer basic questions about them: Probability o Random variables o Axioms of probability o Joint, marginal, conditional probability
Feature extraction: Corners and blobs
 Feature extraction: Corners and blobs Review: Linear filtering and edge detection Name two different kinds of image noise Name a non-linear smoothing filter What advantages does median filtering have over
Feature extraction: Corners and blobs Review: Linear filtering and edge detection Name two different kinds of image noise Name a non-linear smoothing filter What advantages does median filtering have over
EEL 851: Biometrics. An Overview of Statistical Pattern Recognition EEL 851 1
 EEL 851: Biometrics An Overview of Statistical Pattern Recognition EEL 851 1 Outline Introduction Pattern Feature Noise Example Problem Analysis Segmentation Feature Extraction Classification Design Cycle
EEL 851: Biometrics An Overview of Statistical Pattern Recognition EEL 851 1 Outline Introduction Pattern Feature Noise Example Problem Analysis Segmentation Feature Extraction Classification Design Cycle
Be able to define the following terms and answer basic questions about them:
 CS440/ECE448 Section Q Fall 2017 Final Review Be able to define the following terms and answer basic questions about them: Probability o Random variables, axioms of probability o Joint, marginal, conditional
CS440/ECE448 Section Q Fall 2017 Final Review Be able to define the following terms and answer basic questions about them: Probability o Random variables, axioms of probability o Joint, marginal, conditional
Multiple Similarities Based Kernel Subspace Learning for Image Classification
 Multiple Similarities Based Kernel Subspace Learning for Image Classification Wang Yan, Qingshan Liu, Hanqing Lu, and Songde Ma National Laboratory of Pattern Recognition, Institute of Automation, Chinese
Multiple Similarities Based Kernel Subspace Learning for Image Classification Wang Yan, Qingshan Liu, Hanqing Lu, and Songde Ma National Laboratory of Pattern Recognition, Institute of Automation, Chinese
When Dictionary Learning Meets Classification
 When Dictionary Learning Meets Classification Bufford, Teresa 1 Chen, Yuxin 2 Horning, Mitchell 3 Shee, Liberty 1 Mentor: Professor Yohann Tendero 1 UCLA 2 Dalhousie University 3 Harvey Mudd College August
When Dictionary Learning Meets Classification Bufford, Teresa 1 Chen, Yuxin 2 Horning, Mitchell 3 Shee, Liberty 1 Mentor: Professor Yohann Tendero 1 UCLA 2 Dalhousie University 3 Harvey Mudd College August
Sparse representation classification and positive L1 minimization
 Sparse representation classification and positive L1 minimization Cencheng Shen Joint Work with Li Chen, Carey E. Priebe Applied Mathematics and Statistics Johns Hopkins University, August 5, 2014 Cencheng
Sparse representation classification and positive L1 minimization Cencheng Shen Joint Work with Li Chen, Carey E. Priebe Applied Mathematics and Statistics Johns Hopkins University, August 5, 2014 Cencheng
Instance-level recognition: Local invariant features. Cordelia Schmid INRIA, Grenoble
 nstance-level recognition: ocal invariant features Cordelia Schmid NRA Grenoble Overview ntroduction to local features Harris interest points + SSD ZNCC SFT Scale & affine invariant interest point detectors
nstance-level recognition: ocal invariant features Cordelia Schmid NRA Grenoble Overview ntroduction to local features Harris interest points + SSD ZNCC SFT Scale & affine invariant interest point detectors
Lecture 8: Interest Point Detection. Saad J Bedros
 #1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Review of Edge Detectors #2 Today s Lecture Interest Points Detection What do we mean with Interest Point Detection in an Image Goal:
#1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Review of Edge Detectors #2 Today s Lecture Interest Points Detection What do we mean with Interest Point Detection in an Image Goal:
High Dimensional Discriminant Analysis
 High Dimensional Discriminant Analysis Charles Bouveyron 1,2, Stéphane Girard 1, and Cordelia Schmid 2 1 LMC IMAG, BP 53, Université Grenoble 1, 38041 Grenoble cedex 9 France (e-mail: charles.bouveyron@imag.fr,
High Dimensional Discriminant Analysis Charles Bouveyron 1,2, Stéphane Girard 1, and Cordelia Schmid 2 1 LMC IMAG, BP 53, Université Grenoble 1, 38041 Grenoble cedex 9 France (e-mail: charles.bouveyron@imag.fr,
CSE 417T: Introduction to Machine Learning. Final Review. Henry Chai 12/4/18
 CSE 417T: Introduction to Machine Learning Final Review Henry Chai 12/4/18 Overfitting Overfitting is fitting the training data more than is warranted Fitting noise rather than signal 2 Estimating! "#$
CSE 417T: Introduction to Machine Learning Final Review Henry Chai 12/4/18 Overfitting Overfitting is fitting the training data more than is warranted Fitting noise rather than signal 2 Estimating! "#$
Dimensionality reduction
 Dimensionality Reduction PCA continued Machine Learning CSE446 Carlos Guestrin University of Washington May 22, 2013 Carlos Guestrin 2005-2013 1 Dimensionality reduction n Input data may have thousands
Dimensionality Reduction PCA continued Machine Learning CSE446 Carlos Guestrin University of Washington May 22, 2013 Carlos Guestrin 2005-2013 1 Dimensionality reduction n Input data may have thousands
Spatial Bayesian Nonparametrics for Natural Image Segmentation
 Spatial Bayesian Nonparametrics for Natural Image Segmentation Erik Sudderth Brown University Joint work with Michael Jordan University of California Soumya Ghosh Brown University Parsing Visual Scenes
Spatial Bayesian Nonparametrics for Natural Image Segmentation Erik Sudderth Brown University Joint work with Michael Jordan University of California Soumya Ghosh Brown University Parsing Visual Scenes
Instance-level l recognition. Cordelia Schmid INRIA
 nstance-level l recognition Cordelia Schmid NRA nstance-level recognition Particular objects and scenes large databases Application Search photos on the web for particular places Find these landmars...in
nstance-level l recognition Cordelia Schmid NRA nstance-level recognition Particular objects and scenes large databases Application Search photos on the web for particular places Find these landmars...in
Feature Engineering, Model Evaluations
 Feature Engineering, Model Evaluations Giri Iyengar Cornell University gi43@cornell.edu Feb 5, 2018 Giri Iyengar (Cornell Tech) Feature Engineering Feb 5, 2018 1 / 35 Overview 1 ETL 2 Feature Engineering
Feature Engineering, Model Evaluations Giri Iyengar Cornell University gi43@cornell.edu Feb 5, 2018 Giri Iyengar (Cornell Tech) Feature Engineering Feb 5, 2018 1 / 35 Overview 1 ETL 2 Feature Engineering
SUPERVISED LEARNING: INTRODUCTION TO CLASSIFICATION
 SUPERVISED LEARNING: INTRODUCTION TO CLASSIFICATION 1 Outline Basic terminology Features Training and validation Model selection Error and loss measures Statistical comparison Evaluation measures 2 Terminology
SUPERVISED LEARNING: INTRODUCTION TO CLASSIFICATION 1 Outline Basic terminology Features Training and validation Model selection Error and loss measures Statistical comparison Evaluation measures 2 Terminology
Use Bin-Ratio Information for Category and Scene Classification
 Use Bin-Ratio Information for Category and Scene Classification Nianhua Xie 1,2, Haibin Ling 2, Weiming Hu 1, Xiaoqin Zhang 1 1 National Laboratory of Pattern Recognition, Institute of Automation, CAS,
Use Bin-Ratio Information for Category and Scene Classification Nianhua Xie 1,2, Haibin Ling 2, Weiming Hu 1, Xiaoqin Zhang 1 1 National Laboratory of Pattern Recognition, Institute of Automation, CAS,
Self-Tuning Semantic Image Segmentation
 Self-Tuning Semantic Image Segmentation Sergey Milyaev 1,2, Olga Barinova 2 1 Voronezh State University sergey.milyaev@gmail.com 2 Lomonosov Moscow State University obarinova@graphics.cs.msu.su Abstract.
Self-Tuning Semantic Image Segmentation Sergey Milyaev 1,2, Olga Barinova 2 1 Voronezh State University sergey.milyaev@gmail.com 2 Lomonosov Moscow State University obarinova@graphics.cs.msu.su Abstract.
Detectors part II Descriptors
 EECS 442 Computer vision Detectors part II Descriptors Blob detectors Invariance Descriptors Some slides of this lectures are courtesy of prof F. Li, prof S. Lazebnik, and various other lecturers Goal:
EECS 442 Computer vision Detectors part II Descriptors Blob detectors Invariance Descriptors Some slides of this lectures are courtesy of prof F. Li, prof S. Lazebnik, and various other lecturers Goal:
Efficient Learning of Sparse, Distributed, Convolutional Feature Representations for Object Recognition
 Efficient Learning of Sparse, Distributed, Convolutional Feature Representations for Object Recognition Kihyuk Sohn Dae Yon Jung Honglak Lee Alfred O. Hero III Dept. of Electrical Engineering and Computer
Efficient Learning of Sparse, Distributed, Convolutional Feature Representations for Object Recognition Kihyuk Sohn Dae Yon Jung Honglak Lee Alfred O. Hero III Dept. of Electrical Engineering and Computer
INTEREST POINTS AT DIFFERENT SCALES
 INTEREST POINTS AT DIFFERENT SCALES Thank you for the slides. They come mostly from the following sources. Dan Huttenlocher Cornell U David Lowe U. of British Columbia Martial Hebert CMU Intuitively, junctions
INTEREST POINTS AT DIFFERENT SCALES Thank you for the slides. They come mostly from the following sources. Dan Huttenlocher Cornell U David Lowe U. of British Columbia Martial Hebert CMU Intuitively, junctions
Machine Learning! in just a few minutes. Jan Peters Gerhard Neumann
 Machine Learning! in just a few minutes Jan Peters Gerhard Neumann 1 Purpose of this Lecture Foundations of machine learning tools for robotics We focus on regression methods and general principles Often
Machine Learning! in just a few minutes Jan Peters Gerhard Neumann 1 Purpose of this Lecture Foundations of machine learning tools for robotics We focus on regression methods and general principles Often
Machine Learning for Signal Processing Bayes Classification and Regression
 Machine Learning for Signal Processing Bayes Classification and Regression Instructor: Bhiksha Raj 11755/18797 1 Recap: KNN A very effective and simple way of performing classification Simple model: For
Machine Learning for Signal Processing Bayes Classification and Regression Instructor: Bhiksha Raj 11755/18797 1 Recap: KNN A very effective and simple way of performing classification Simple model: For
Detecting Humans via Their Pose
 Detecting Humans via Their Pose Alessandro Bissacco Computer Science Department University of California, Los Angeles Los Angeles, CA 90095 bissacco@cs.ucla.edu Ming-Hsuan Yang Honda Research Institute
Detecting Humans via Their Pose Alessandro Bissacco Computer Science Department University of California, Los Angeles Los Angeles, CA 90095 bissacco@cs.ucla.edu Ming-Hsuan Yang Honda Research Institute
SIFT: SCALE INVARIANT FEATURE TRANSFORM BY DAVID LOWE
 SIFT: SCALE INVARIANT FEATURE TRANSFORM BY DAVID LOWE Overview Motivation of Work Overview of Algorithm Scale Space and Difference of Gaussian Keypoint Localization Orientation Assignment Descriptor Building
SIFT: SCALE INVARIANT FEATURE TRANSFORM BY DAVID LOWE Overview Motivation of Work Overview of Algorithm Scale Space and Difference of Gaussian Keypoint Localization Orientation Assignment Descriptor Building
Machine Learning. CUNY Graduate Center, Spring Lectures 11-12: Unsupervised Learning 1. Professor Liang Huang.
 Machine Learning CUNY Graduate Center, Spring 2013 Lectures 11-12: Unsupervised Learning 1 (Clustering: k-means, EM, mixture models) Professor Liang Huang huang@cs.qc.cuny.edu http://acl.cs.qc.edu/~lhuang/teaching/machine-learning
Machine Learning CUNY Graduate Center, Spring 2013 Lectures 11-12: Unsupervised Learning 1 (Clustering: k-means, EM, mixture models) Professor Liang Huang huang@cs.qc.cuny.edu http://acl.cs.qc.edu/~lhuang/teaching/machine-learning
Grouplet: A Structured Image Representation for Recognizing Human and Object Interactions
 Grouplet: A Structured Image Representation for Recognizing Human and Object Interactions Bangpeng Yao Li Fei-Fei Computer Science Department, Stanford University, USA {bangpeng,feifeili}@cs.stanford.edu
Grouplet: A Structured Image Representation for Recognizing Human and Object Interactions Bangpeng Yao Li Fei-Fei Computer Science Department, Stanford University, USA {bangpeng,feifeili}@cs.stanford.edu
Spectral Hashing: Learning to Leverage 80 Million Images
 Spectral Hashing: Learning to Leverage 80 Million Images Yair Weiss, Antonio Torralba, Rob Fergus Hebrew University, MIT, NYU Outline Motivation: Brute Force Computer Vision. Semantic Hashing. Spectral
Spectral Hashing: Learning to Leverage 80 Million Images Yair Weiss, Antonio Torralba, Rob Fergus Hebrew University, MIT, NYU Outline Motivation: Brute Force Computer Vision. Semantic Hashing. Spectral
Lecture 24: Principal Component Analysis. Aykut Erdem May 2016 Hacettepe University
 Lecture 4: Principal Component Analysis Aykut Erdem May 016 Hacettepe University This week Motivation PCA algorithms Applications PCA shortcomings Autoencoders Kernel PCA PCA Applications Data Visualization
Lecture 4: Principal Component Analysis Aykut Erdem May 016 Hacettepe University This week Motivation PCA algorithms Applications PCA shortcomings Autoencoders Kernel PCA PCA Applications Data Visualization
Deep Generative Image Models using a Laplacian Pyramid of Adversarial Networks
 Deep Generative Image Models using a Laplacian Pyramid of Adversarial Networks Emily Denton 1, Soumith Chintala 2, Arthur Szlam 2, Rob Fergus 2 1 New York University 2 Facebook AI Research Denotes equal
Deep Generative Image Models using a Laplacian Pyramid of Adversarial Networks Emily Denton 1, Soumith Chintala 2, Arthur Szlam 2, Rob Fergus 2 1 New York University 2 Facebook AI Research Denotes equal
Modeling Mutual Context of Object and Human Pose in Human-Object Interaction Activities
 Modeling Mutual Context of Object and Human Pose in Human-Object Interaction Activities Bangpeng Yao and Li Fei-Fei Computer Science Department, Stanford University {bangpeng,feifeili}@cs.stanford.edu
Modeling Mutual Context of Object and Human Pose in Human-Object Interaction Activities Bangpeng Yao and Li Fei-Fei Computer Science Department, Stanford University {bangpeng,feifeili}@cs.stanford.edu
How to do backpropagation in a brain
 How to do backpropagation in a brain Geoffrey Hinton Canadian Institute for Advanced Research & University of Toronto & Google Inc. Prelude I will start with three slides explaining a popular type of deep
How to do backpropagation in a brain Geoffrey Hinton Canadian Institute for Advanced Research & University of Toronto & Google Inc. Prelude I will start with three slides explaining a popular type of deep
Neural networks and optimization
 Neural networks and optimization Nicolas Le Roux INRIA 8 Nov 2011 Nicolas Le Roux (INRIA) Neural networks and optimization 8 Nov 2011 1 / 80 1 Introduction 2 Linear classifier 3 Convolutional neural networks
Neural networks and optimization Nicolas Le Roux INRIA 8 Nov 2011 Nicolas Le Roux (INRIA) Neural networks and optimization 8 Nov 2011 1 / 80 1 Introduction 2 Linear classifier 3 Convolutional neural networks
Machine Learning and Deep Learning! Vincent Lepetit!
 Machine Learning and Deep Learning!! Vincent Lepetit! 1! What is Machine Learning?! 2! Hand-Written Digit Recognition! 2 9 3! Hand-Written Digit Recognition! Formalization! 0 1 x = @ A Images are 28x28
Machine Learning and Deep Learning!! Vincent Lepetit! 1! What is Machine Learning?! 2! Hand-Written Digit Recognition! 2 9 3! Hand-Written Digit Recognition! Formalization! 0 1 x = @ A Images are 28x28
Workshop on Web- scale Vision and Social Media ECCV 2012, Firenze, Italy October, 2012 Linearized Smooth Additive Classifiers
 Worshop on Web- scale Vision and Social Media ECCV 2012, Firenze, Italy October, 2012 Linearized Smooth Additive Classifiers Subhransu Maji Research Assistant Professor Toyota Technological Institute at
Worshop on Web- scale Vision and Social Media ECCV 2012, Firenze, Italy October, 2012 Linearized Smooth Additive Classifiers Subhransu Maji Research Assistant Professor Toyota Technological Institute at
Style-aware Mid-level Representation for Discovering Visual Connections in Space and Time
 Style-aware Mid-level Representation for Discovering Visual Connections in Space and Time Experiment presentation for CS3710:Visual Recognition Presenter: Zitao Liu University of Pittsburgh ztliu@cs.pitt.edu
Style-aware Mid-level Representation for Discovering Visual Connections in Space and Time Experiment presentation for CS3710:Visual Recognition Presenter: Zitao Liu University of Pittsburgh ztliu@cs.pitt.edu
DISCRIMINATIVE DECORELATION FOR CLUSTERING AND CLASSIFICATION
 DISCRIMINATIVE DECORELATION FOR CLUSTERING AND CLASSIFICATION ECCV 12 Bharath Hariharan, Jitandra Malik, and Deva Ramanan MOTIVATION State-of-the-art Object Detection HOG Linear SVM Dalal&Triggs Histograms
DISCRIMINATIVE DECORELATION FOR CLUSTERING AND CLASSIFICATION ECCV 12 Bharath Hariharan, Jitandra Malik, and Deva Ramanan MOTIVATION State-of-the-art Object Detection HOG Linear SVM Dalal&Triggs Histograms
Unsupervised Learning: K- Means & PCA
 Unsupervised Learning: K- Means & PCA Unsupervised Learning Supervised learning used labeled data pairs (x, y) to learn a func>on f : X Y But, what if we don t have labels? No labels = unsupervised learning
Unsupervised Learning: K- Means & PCA Unsupervised Learning Supervised learning used labeled data pairs (x, y) to learn a func>on f : X Y But, what if we don t have labels? No labels = unsupervised learning
Issues and Techniques in Pattern Classification
 Issues and Techniques in Pattern Classification Carlotta Domeniconi www.ise.gmu.edu/~carlotta Machine Learning Given a collection of data, a machine learner eplains the underlying process that generated
Issues and Techniques in Pattern Classification Carlotta Domeniconi www.ise.gmu.edu/~carlotta Machine Learning Given a collection of data, a machine learner eplains the underlying process that generated
Final Overview. Introduction to ML. Marek Petrik 4/25/2017
 Final Overview Introduction to ML Marek Petrik 4/25/2017 This Course: Introduction to Machine Learning Build a foundation for practice and research in ML Basic machine learning concepts: max likelihood,
Final Overview Introduction to ML Marek Petrik 4/25/2017 This Course: Introduction to Machine Learning Build a foundation for practice and research in ML Basic machine learning concepts: max likelihood,