Pattern Classification and NNet applications with memristive crossbar circuits. Fabien ALIBART D. Strukov s group, ECE-UCSB Now at IEMN-CNRS, France
|
|
|
- Giles McKinney
- 6 years ago
- Views:
Transcription
1 Paern Classificaion and NNe applicaions wih memrisive crossbar circuis Fabien ALIBART D. Srukov s group, ECE-UCSB Now a IEMN-CNRS, France
2 Ouline Inroducion: Neural Nework wih memrisive devices Engineering and swiching dynamics High precision analog uning Nne Circuis MAC operaion Hopfield A/D converer Paern classifier Conclusion
 Von Neumann boleneck Increase of Faul")


3 Inroducion: Why ANNe New needs for compuing Recogniion, Mining, Synhesis (Inel) Von Neumann boleneck Increase of Faul (nanoscale engineering) SEMICONDUCTOR TECHNOLOGY CHALLENGES Sauraion of clock frequency + Energy consumpion Shif oward a new paradigm for compuaion BIO-INSPIRED COMPUTING o mach he brain performances (low power consumpion, faul oleran, performances for RMS)
4 Inroducion: NNET basic principle synapse Biological neural nework OUTPUT Bio-inspired sysem: in he brain, we learn by creaing (weighing) synapic connecions beween neurons from differen experiences. Afer, we can reac o unknown siuaions which are similar o he learning ones. INPUT The memory is in he processing uni (Direc soluion o Von Neumann boleneck!)



5 Inroducion: NNET roadmap 1 11 neurons / 1 15 synapses OxRAM + CMOS neuron Memrisive Xbar + CMOS


6 Curren (A) Memrisive TiO2 devices 1E-3 Incremenal rese Incremenal se Single sweep 1E-4 1E-5 1E-6 S A V RESET: R =R ON SET: R =R OFF 1 1E Volage (V) -Non-linear I-V -Analog non-volaile memory (any sae beween R on and Roff is accessible and sable) - smooh RESET ransiion - sharp SET ransiion - plaeau of non disurbing volage pulses Pulse volage (V) Main challenge: how o deal wih dispersion E-8 1E-6 1E-4.1 Time (s) R/R


7 Pourcenage of working devices Curren (A) Curren (A) Engineering 2 nm No prousion (5 devices) 17 nm prousion (1 devices) nm TiO 2-x 25 nm Au / 15 nm P op elecrode e-beam paerned P prorusion 1E-3 1E-4 1E-5 1E-6 1E-3 1E-4 1E-5 1E-6 5 nm Ti / 25 nm P boom elecrode 1E-7 1E-7 1E-8 2 nm 1E Volage (V) -1 1 Volage (V) 1 8 Engineering improve yield and decrease dispersion (beer conrol of forming) no prousion 17 nm prousion
8 V Tune Rese Read Swiching V Tune Read Se 6uA 3uA 1uA mV 3 parameer for swiching: -Volage -Time -Iniial sae 2mV uA 3uA 1uA.6.8 Pulse volage x x1-6 Cumulaive ime cumulaive ime (s) 1.x1-6 2.x Pulse volage -.6
9 V Tune Rese Read Swiching V Tune Read Se 6uA 3uA 1uA mV 3 parameers for swiching: -Volage -Time -Iniial sae 2mV uA 3uA 1uA.6.8 Pulse volage x x1-6 Cumulaive ime cumulaive ime (s) 1.x1-6 2.x Pulse volage mV (A) Bu sill a large dispersion!! mV (A) Volage (V) x1-6 4.x1-6 6.x1-6 8.x1-6 1.x1-5 Cumulaive ime (s) Volage (V) x1-7 1.x x1-6 2.x1-6 Cumulaive ime (s)
10 V Tune Rese Read Swiching V Tune Read Se.6.8 Pulse volage uA 3uA 1uA 1.x x1-6 Cumulaive ime 2mV Resriced analysis (2 parameers): -Volage -Iniial sae 2mV uA 3uA 1uA cumulaive ime (s) 1.x1-6 2.x Pulse volage S = une wrie read Conducance, G INITIAL (ms) Pulse volage (V) Parial conclusion: engineering is no enough o deal wih dispersion G AFTER /G INITIAL Read only available Self- limied swiching for boh SET and RESET ransiions
11 Resisance ( Curren (ma) G I(.2V)/.2 V S = S A V Algorihm Objecive: une he device o a desired sae by pulses of volage The perfec picure: Swiching dynamic Saisics Volage (V) -V swich +V swich Device modeling 1 Which pulse for a given sae? Tuning of he device/evaluaion Feedback conrol A more simple picure: sweep V or 1 V P =-1V V P =-1.1V V P =-1.2V V P =-1.3V Number of pulses (N+1) DILEMA Using Volage as he parameer: poenially fas bu low precision Using as he parameer: good accuracy bu may required infinie ime In addiion, we need o deal wih dispersion!
12 -2mV (A) Resisance sae Algorihm arge ime 1E-4 6 A 3 A 15 A 1E-5 Decrease Weigh Increase Weigh Sand-by (Read only) Time (s)
13 (A) -2mV ( A) Algorihm 1E-4 1E-5 volage Decrease se Weigh ime Increase Weigh Sand-by read (Read only) rese Pulse Number 12 A 6 A 3 A 7 A Pulse Number 15 A 1% accuracy equivalen o 8-bi Inermediae sae are non-volaile Can be improved wih beer modeling (more elaboraed feedback) Accuracy is limied by noise (evidence of RTS)
14 Inpu1 (V) Inpu2(V) Programming Programming Programming Programming Programming Oupu (V) Circui: MAC operaion 2 1 Inpu1 Inpu2 2K Oupu CMOS opamp R 2 =3333ohm R 2 =6666ohm R 2 =13333ohm R 2 =13333ohm R 2 =13333ohm R 1 =3333ohm R 1 =3333ohm R 1 =3333ohm R 1 =6666ohm R 1 =13333ohm 5 1 Time (s)
 o digial (oupu)")
15 Circui: Hopfield Nework Basically an associaive memory: Energy funcion Suiable also for opimizaion problem, speech recogniion An example: Analog (inpu) o digial (oupu) conversion


16 Vinpu Circui: Hopfield Nework TiO2 memrisive devices
17 Paern classificaion v 1 v 2 v 3 v 4 Principle of a percepron: R 1 R 2 ou R 3 R 4. Vi/Ri ou The percepron ask is o realize classificaion: Considering a se of daa {(V 1,,V n )}, if his ensemble of daa is composed of wo separable group A and B, i is possible o define a se of (R 1,,R n ) ha verifies: V i /R i > hreshold if (V 1 V n ) is A (i.e. ou=1) V i /R i < hreshold if (V 1 V n ) is B (i.e. ou=) {V ib } Se of daas v n R n {V ia } The se of weigh is deermined by opimizaion procedure on real daas, or raining daas (No analyical soluion). This sage of programming is called learning (he sysem is rained o reac properly by adjusing he weighs). The performances are hen evaluaed on a esing se of daas (operaion of he sysem)



18 Seminal work Paern classificaion memisor
19 Paern classificaion bias x x 1 x 2 x 3 x 4 x 5 x 6 x 7 x 8 x 9 pre-synapic neurons (inpus) Inpu se of paerns X Desired oupu: d = +1 Inpu se of paerns T Desired oupu: d = -1 w + w - I + I - y Learning rule: possynapic neuron (oupu) w + w 1 + w 2 + w 3 + w 4 + w 5 + w 6 + w 7 + w 8 + w 9 + w - w - w - 2 w - 3 w - 4 w - 5 w - 6 w - 7 w - 8 w x x 1 x 2 x 3 x 4 x 5 x 6 x 7 x 8 x 9 y + y - = memrisors
 Ground (GNDU, Agilen) Agilen B15 Wires implemening crossbar circui Chip packaged wire bonded memrisive devices")
20 Paern classificaion: seup V Arbirary waveform generaor B153 Swiching marix (Agilen E525A) A Curren measuremen B153 (fas IV mode) Ground (GNDU, Agilen) Agilen B15 Wires implemening crossbar circui Chip packaged wire bonded memrisive devices
 High precision algorihm Soluion: half bias rick.")
21 2mV Paern classificaion: Ex siu We wan u use our high precision algorihm o une he sae of each device sequencially The final weighs are calculaed on a sofware based precursor nework. Challenge: we need o impor he weigh ino he Xbar array (XTALK) High precision algorihm Soluion: half bias rick. S1 Wrie D1 D2 1E-4 9uA 6uA Sligh Xalk V D3 V D4 S2 read 1E-5 device1 device2 device3 device number of pulses # 3uA 15uA 5-bi accuracy sill available Vread V D1 D3 V D2 D4 V
22 2mV (A) Number of Paern # 2mV (A) Paern classificaion: Ex siu A B 1 Iniial X T 1-4 accuracy ~1% weigh afer raining w + uning w - 1 Accuracy ~ 4% 1-5 weigh affeced by half-selec problem Accuracy ~ 1% C Pulse number # 1 Accuracy ~ 2% 1-4 accuracy ~2% weigh afer raining w + uning w I + - I - (A) Pulse number # 3-bi accuracy is enough for his classificaion ask Can be improve by dela rule insead of percepron rule
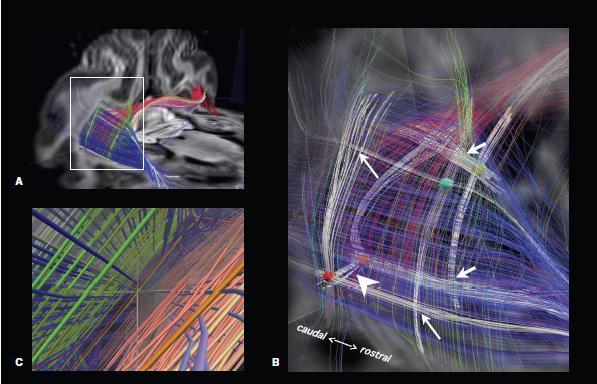
23 Paern classificaion: In siu +Vswich v -Vswich pre-synapic volage v x =-1 x =+1 v 4-sep pulse sequence Training in parallel of all he devices pos-synapic volage v d =+1 d = A Inpu se of paerns T Desired oupu: d = -1 Inpu se of paerns X Desired oupu: d = +1 y+ m B x +Vswich -Vswich x1 x2 x3 x4 x5 x6 x7 x8 v x9 v v x y- x1 x4 x7 x2 x5 x8 x3 x6 x9 pre-synapic neurons D (inpus) +Vs -Vs w- w+ v bias I+ volage across memrisors I- y Learning rule: = possynapic neuron (oupu) +Vs -Vs
24 Number of paern # ( 2mV) Paern classificaion: In siu A B V raining =.9V V raining = 1V 1 Iniial X T epochs V raining =.9V epochs V raining =1V I + - I - (A) Training evens # Figure 4
25 Number of Paern # = 2mV Paern classificaion: In siu A V TRAINING B 1 INITIAL.9V 1V 1.1V 8 class inversion 1 T -1 X T -1 X +1 X -1 T V TRAINING 2.9V 1 X -1 T V 1.1V 1 X -1 T Training evens I + - I - (A) RECONFIGURABLE Figure S4
26 conclusion Physics of he memrisive devices o be coninued (modeling will improve algorihms) Memrisive Xbar is promising for larger scale NNET circui implemenaion (forming free devices is required) Heerogeneous CMOS/Xbar is he nex echnological challenge (implemenaion of CMOL concep)



27 Acknowledgmens Open posiion: 1 Posdoc a UCSB 1 Posdoc a IEMN Supervisor: Dmiri Srukov ADC work: Ligang Gao, Farnood Merrikh-Baya, Xinjie Guo Paern classificaion: Elham Zamanidoos Maerial science: Brian Hoskins
Dmitri Strukov. UC Santa Barbara
 Paern Classificaion wih Memrisive Xbar Circuis Dmiri Srukov UC Sana Barbara Acknowledgmens: Fabien Alibar, Elham Zamanidoos, Brian Hoskins, Gina Adam, Farnood Merrikh Baya, Xinjie Guo, Ligang Gao, Chrisof
Paern Classificaion wih Memrisive Xbar Circuis Dmiri Srukov UC Sana Barbara Acknowledgmens: Fabien Alibar, Elham Zamanidoos, Brian Hoskins, Gina Adam, Farnood Merrikh Baya, Xinjie Guo, Ligang Gao, Chrisof
Designing Information Devices and Systems I Spring 2019 Lecture Notes Note 17
 EES 16A Designing Informaion Devices and Sysems I Spring 019 Lecure Noes Noe 17 17.1 apaciive ouchscreen In he las noe, we saw ha a capacior consiss of wo pieces on conducive maerial separaed by a nonconducive
EES 16A Designing Informaion Devices and Sysems I Spring 019 Lecure Noes Noe 17 17.1 apaciive ouchscreen In he las noe, we saw ha a capacior consiss of wo pieces on conducive maerial separaed by a nonconducive
CHAPTER 10 VALIDATION OF TEST WITH ARTIFICAL NEURAL NETWORK
 175 CHAPTER 10 VALIDATION OF TEST WITH ARTIFICAL NEURAL NETWORK 10.1 INTRODUCTION Amongs he research work performed, he bes resuls of experimenal work are validaed wih Arificial Neural Nework. From he
175 CHAPTER 10 VALIDATION OF TEST WITH ARTIFICAL NEURAL NETWORK 10.1 INTRODUCTION Amongs he research work performed, he bes resuls of experimenal work are validaed wih Arificial Neural Nework. From he
Manhattan Rule Training for Memristive Crossbar Circuit Pattern Classifiers
 Manhaan Rule Training for Memrisive Crossbar Circui Paern Classifiers Elham Zamanidoos, Farnood M. Baya, Dmiri Srukov Elecrical and Compuer Engineering Deparmen Universiy Of California Sana Barbara Sana
Manhaan Rule Training for Memrisive Crossbar Circui Paern Classifiers Elham Zamanidoos, Farnood M. Baya, Dmiri Srukov Elecrical and Compuer Engineering Deparmen Universiy Of California Sana Barbara Sana
EECS 141: FALL 00 MIDTERM 2
 Universiy of California College of Engineering Deparmen of Elecrical Engineering and Compuer Science J. M. Rabaey TuTh9:30-11am ee141@eecs EECS 141: FALL 00 MIDTERM 2 For all problems, you can assume he
Universiy of California College of Engineering Deparmen of Elecrical Engineering and Compuer Science J. M. Rabaey TuTh9:30-11am ee141@eecs EECS 141: FALL 00 MIDTERM 2 For all problems, you can assume he
Chapter 5 Digital PID control algorithm. Hesheng Wang Department of Automation,SJTU 2016,03
 Chaper 5 Digial PID conrol algorihm Hesheng Wang Deparmen of Auomaion,SJTU 216,3 Ouline Absrac Quasi-coninuous PID conrol algorihm Improvemen of sandard PID algorihm Choosing parameer of PID regulaor Brief
Chaper 5 Digial PID conrol algorihm Hesheng Wang Deparmen of Auomaion,SJTU 216,3 Ouline Absrac Quasi-coninuous PID conrol algorihm Improvemen of sandard PID algorihm Choosing parameer of PID regulaor Brief
University of Cyprus Biomedical Imaging and Applied Optics. Appendix. DC Circuits Capacitors and Inductors AC Circuits Operational Amplifiers
 Universiy of Cyprus Biomedical Imaging and Applied Opics Appendix DC Circuis Capaciors and Inducors AC Circuis Operaional Amplifiers Circui Elemens An elecrical circui consiss of circui elemens such as
Universiy of Cyprus Biomedical Imaging and Applied Opics Appendix DC Circuis Capaciors and Inducors AC Circuis Operaional Amplifiers Circui Elemens An elecrical circui consiss of circui elemens such as
The Rosenblatt s LMS algorithm for Perceptron (1958) is built around a linear neuron (a neuron with a linear
 is built around a linear neuron (a neuron with a linear") In The name of God Lecure4: Percepron and AALIE r. Majid MjidGhoshunih Inroducion The Rosenbla s LMS algorihm for Percepron 958 is buil around a linear neuron a neuron ih a linear acivaion funcion. Hoever,
In The name of God Lecure4: Percepron and AALIE r. Majid MjidGhoshunih Inroducion The Rosenbla s LMS algorihm for Percepron 958 is buil around a linear neuron a neuron ih a linear acivaion funcion. Hoever,
Topic Astable Circuits. Recall that an astable circuit has two unstable states;
 Topic 2.2. Asable Circuis. Learning Objecives: A he end o his opic you will be able o; Recall ha an asable circui has wo unsable saes; Explain he operaion o a circui based on a Schmi inverer, and esimae
Topic 2.2. Asable Circuis. Learning Objecives: A he end o his opic you will be able o; Recall ha an asable circui has wo unsable saes; Explain he operaion o a circui based on a Schmi inverer, and esimae
i L = VT L (16.34) 918a i D v OUT i L v C V - S 1 FIGURE A switched power supply circuit with diode and a switch.
 918a i D v OUT i L v C V - S 1 FIGURE A switched power supply circuit with diode and a switch.") 16.4.3 A SWITHED POWER SUPPY USINGA DIODE In his example, we will analyze he behavior of he diodebased swiched power supply circui shown in Figure 16.15. Noice ha his circui is similar o ha in Figure 12.41,
16.4.3 A SWITHED POWER SUPPY USINGA DIODE In his example, we will analyze he behavior of he diodebased swiched power supply circui shown in Figure 16.15. Noice ha his circui is similar o ha in Figure 12.41,
Linear Time-invariant systems, Convolution, and Cross-correlation
 Linear Time-invarian sysems, Convoluion, and Cross-correlaion (1) Linear Time-invarian (LTI) sysem A sysem akes in an inpu funcion and reurns an oupu funcion. x() T y() Inpu Sysem Oupu y() = T[x()] An
Linear Time-invarian sysems, Convoluion, and Cross-correlaion (1) Linear Time-invarian (LTI) sysem A sysem akes in an inpu funcion and reurns an oupu funcion. x() T y() Inpu Sysem Oupu y() = T[x()] An
HV513 8-Channel Serial to Parallel Converter with High Voltage Push-Pull Outputs, POL, Hi-Z, and Short Circuit Detect
 H513 8-Channel Serial o Parallel Converer wih High olage Push-Pull s, POL, Hi-Z, and Shor Circui Deec Feaures HCMOS echnology Operaing oupu volage of 250 Low power level shifing from 5 o 250 Shif regiser
H513 8-Channel Serial o Parallel Converer wih High olage Push-Pull s, POL, Hi-Z, and Shor Circui Deec Feaures HCMOS echnology Operaing oupu volage of 250 Low power level shifing from 5 o 250 Shif regiser
ES 250 Practice Final Exam
 ES 50 Pracice Final Exam. Given ha v 8 V, a Deermine he values of v o : 0 Ω, v o. V 0 Firs, v o 8. V 0 + 0 Nex, 8 40 40 0 40 0 400 400 ib i 0 40 + 40 + 40 40 40 + + ( ) 480 + 5 + 40 + 8 400 400( 0) 000
ES 50 Pracice Final Exam. Given ha v 8 V, a Deermine he values of v o : 0 Ω, v o. V 0 Firs, v o 8. V 0 + 0 Nex, 8 40 40 0 40 0 400 400 ib i 0 40 + 40 + 40 40 40 + + ( ) 480 + 5 + 40 + 8 400 400( 0) 000
Learning Objectives: Practice designing and simulating digital circuits including flip flops Experience state machine design procedure
 Lab 4: Synchronous Sae Machine Design Summary: Design and implemen synchronous sae machine circuis and es hem wih simulaions in Cadence Viruoso. Learning Objecives: Pracice designing and simulaing digial
Lab 4: Synchronous Sae Machine Design Summary: Design and implemen synchronous sae machine circuis and es hem wih simulaions in Cadence Viruoso. Learning Objecives: Pracice designing and simulaing digial
( ) = Q 0. ( ) R = R dq. ( t) = I t
 = Q 0. ( ) R = R dq. ( t) = I t") ircuis onceps The addiion of a simple capacior o a circui of resisors allows wo relaed phenomena o occur The observaion ha he ime-dependence of a complex waveform is alered by he circui is referred o as
ircuis onceps The addiion of a simple capacior o a circui of resisors allows wo relaed phenomena o occur The observaion ha he ime-dependence of a complex waveform is alered by he circui is referred o as
( ) ( ) if t = t. It must satisfy the identity. So, bulkiness of the unit impulse (hyper)function is equal to 1. The defining characteristic is
 ( ) if t = t. It must satisfy the identity. So, bulkiness of the unit impulse (hyper)function is equal to 1. The defining characteristic is") UNIT IMPULSE RESPONSE, UNIT STEP RESPONSE, STABILITY. Uni impulse funcion (Dirac dela funcion, dela funcion) rigorously defined is no sricly a funcion, bu disribuion (or measure), precise reamen requires
UNIT IMPULSE RESPONSE, UNIT STEP RESPONSE, STABILITY. Uni impulse funcion (Dirac dela funcion, dela funcion) rigorously defined is no sricly a funcion, bu disribuion (or measure), precise reamen requires
Analytic Model and Bilateral Approximation for Clocked Comparator
 Analyic Model and Bilaeral Approximaion for Clocked Comparaor M. Greians, E. Hermanis, G.Supols Insiue of, Riga, Lavia, e-mail: gais.supols@edi.lv Research is suppored by: 1) ESF projec Nr.1DP/1.1.1.2.0/09/APIA/VIAA/020,
Analyic Model and Bilaeral Approximaion for Clocked Comparaor M. Greians, E. Hermanis, G.Supols Insiue of, Riga, Lavia, e-mail: gais.supols@edi.lv Research is suppored by: 1) ESF projec Nr.1DP/1.1.1.2.0/09/APIA/VIAA/020,
LabQuest 24. Capacitors
 Capaciors LabQues 24 The charge q on a capacior s plae is proporional o he poenial difference V across he capacior. We express his wih q V = C where C is a proporionaliy consan known as he capaciance.
Capaciors LabQues 24 The charge q on a capacior s plae is proporional o he poenial difference V across he capacior. We express his wih q V = C where C is a proporionaliy consan known as he capaciance.
Hidden Markov Models. Adapted from. Dr Catherine Sweeney-Reed s slides
 Hidden Markov Models Adaped from Dr Caherine Sweeney-Reed s slides Summary Inroducion Descripion Cenral in HMM modelling Exensions Demonsraion Specificaion of an HMM Descripion N - number of saes Q = {q
Hidden Markov Models Adaped from Dr Caherine Sweeney-Reed s slides Summary Inroducion Descripion Cenral in HMM modelling Exensions Demonsraion Specificaion of an HMM Descripion N - number of saes Q = {q
Ensamble methods: Bagging and Boosting
 Lecure 21 Ensamble mehods: Bagging and Boosing Milos Hauskrech milos@cs.pi.edu 5329 Senno Square Ensemble mehods Mixure of expers Muliple base models (classifiers, regressors), each covers a differen par
Lecure 21 Ensamble mehods: Bagging and Boosing Milos Hauskrech milos@cs.pi.edu 5329 Senno Square Ensemble mehods Mixure of expers Muliple base models (classifiers, regressors), each covers a differen par
(b) (a) (d) (c) (e) Figure 10-N1. (f) Solution:
 (a) (d) (c) (e) Figure 10-N1. (f) Solution:") Example: The inpu o each of he circuis shown in Figure 10-N1 is he volage source volage. The oupu of each circui is he curren i( ). Deermine he oupu of each of he circuis. (a) (b) (c) (d) (e) Figure 10-N1
Example: The inpu o each of he circuis shown in Figure 10-N1 is he volage source volage. The oupu of each circui is he curren i( ). Deermine he oupu of each of he circuis. (a) (b) (c) (d) (e) Figure 10-N1
Non Linear Op Amp Circuits.
 Non Linear Op Amp ircuis. omparaors wih 0 and non zero reference volage. omparaors wih hyseresis. The Schmid Trigger. Window comparaors. The inegraor. Waveform conversion. Sine o ecangular. ecangular o
Non Linear Op Amp ircuis. omparaors wih 0 and non zero reference volage. omparaors wih hyseresis. The Schmid Trigger. Window comparaors. The inegraor. Waveform conversion. Sine o ecangular. ecangular o
Homework-8(1) P8.3-1, 3, 8, 10, 17, 21, 24, 28,29 P8.4-1, 2, 5
 P8.3-1, 3, 8, 10, 17, 21, 24, 28,29 P8.4-1, 2, 5") Homework-8() P8.3-, 3, 8, 0, 7, 2, 24, 28,29 P8.4-, 2, 5 Secion 8.3: The Response of a Firs Order Circui o a Consan Inpu P 8.3- The circui shown in Figure P 8.3- is a seady sae before he swich closes a
Homework-8() P8.3-, 3, 8, 0, 7, 2, 24, 28,29 P8.4-, 2, 5 Secion 8.3: The Response of a Firs Order Circui o a Consan Inpu P 8.3- The circui shown in Figure P 8.3- is a seady sae before he swich closes a
Physical Limitations of Logic Gates Week 10a
 Physical Limiaions of Logic Gaes Week 10a In a compuer we ll have circuis of logic gaes o perform specific funcions Compuer Daapah: Boolean algebraic funcions using binary variables Symbolic represenaion
Physical Limiaions of Logic Gaes Week 10a In a compuer we ll have circuis of logic gaes o perform specific funcions Compuer Daapah: Boolean algebraic funcions using binary variables Symbolic represenaion
RC, RL and RLC circuits
 Name Dae Time o Complee h m Parner Course/ Secion / Grade RC, RL and RLC circuis Inroducion In his experimen we will invesigae he behavior of circuis conaining combinaions of resisors, capaciors, and inducors.
Name Dae Time o Complee h m Parner Course/ Secion / Grade RC, RL and RLC circuis Inroducion In his experimen we will invesigae he behavior of circuis conaining combinaions of resisors, capaciors, and inducors.
Deep Learning: Theory, Techniques & Applications - Recurrent Neural Networks -
 Deep Learning: Theory, Techniques & Applicaions - Recurren Neural Neworks - Prof. Maeo Maeucci maeo.maeucci@polimi.i Deparmen of Elecronics, Informaion and Bioengineering Arificial Inelligence and Roboics
Deep Learning: Theory, Techniques & Applicaions - Recurren Neural Neworks - Prof. Maeo Maeucci maeo.maeucci@polimi.i Deparmen of Elecronics, Informaion and Bioengineering Arificial Inelligence and Roboics
Dimitri Solomatine. D.P. Solomatine. Data-driven modelling (part 2). 2
. 2") Daa-driven modelling. Par. Daa-driven Arificial di Neural modelling. Newors Par Dimiri Solomaine Arificial neural newors D.P. Solomaine. Daa-driven modelling par. 1 Arificial neural newors ANN: main pes
Daa-driven modelling. Par. Daa-driven Arificial di Neural modelling. Newors Par Dimiri Solomaine Arificial neural newors D.P. Solomaine. Daa-driven modelling par. 1 Arificial neural newors ANN: main pes
Unified Control Strategy Covering CCM and DCM for a Synchronous Buck Converter
 Unified Conrol Sraegy Covering CCM and DCM for a Synchronous Buck Converer Dirk Hirschmann, Sebasian Richer, Chrisian Dick, Rik W. De Doncker Insiue for Power Elecronics and Elecrical Drives RWTH Aachen
Unified Conrol Sraegy Covering CCM and DCM for a Synchronous Buck Converer Dirk Hirschmann, Sebasian Richer, Chrisian Dick, Rik W. De Doncker Insiue for Power Elecronics and Elecrical Drives RWTH Aachen
Ensamble methods: Boosting
 Lecure 21 Ensamble mehods: Boosing Milos Hauskrech milos@cs.pi.edu 5329 Senno Square Schedule Final exam: April 18: 1:00-2:15pm, in-class Term projecs April 23 & April 25: a 1:00-2:30pm in CS seminar room
Lecure 21 Ensamble mehods: Boosing Milos Hauskrech milos@cs.pi.edu 5329 Senno Square Schedule Final exam: April 18: 1:00-2:15pm, in-class Term projecs April 23 & April 25: a 1:00-2:30pm in CS seminar room
Zhihan Xu, Matt Proctor, Ilia Voloh
 Zhihan Xu, Ma rocor, lia Voloh - GE Digial Energy Mike Lara - SNC-Lavalin resened by: Terrence Smih GE Digial Energy CT fundamenals Circui model, exciaion curve, simulaion model CT sauraion AC sauraion,
Zhihan Xu, Ma rocor, lia Voloh - GE Digial Energy Mike Lara - SNC-Lavalin resened by: Terrence Smih GE Digial Energy CT fundamenals Circui model, exciaion curve, simulaion model CT sauraion AC sauraion,
EE 315 Notes. Gürdal Arslan CLASS 1. (Sections ) What is a signal?
 What is a signal?") EE 35 Noes Gürdal Arslan CLASS (Secions.-.2) Wha is a signal? In his class, a signal is some funcion of ime and i represens how some physical quaniy changes over some window of ime. Examples: velociy of
EE 35 Noes Gürdal Arslan CLASS (Secions.-.2) Wha is a signal? In his class, a signal is some funcion of ime and i represens how some physical quaniy changes over some window of ime. Examples: velociy of
Embedded Systems and Software. A Simple Introduction to Embedded Control Systems (PID Control)
") Embedded Sysems and Sofware A Simple Inroducion o Embedded Conrol Sysems (PID Conrol) Embedded Sysems and Sofware, ECE:3360. The Universiy of Iowa, 2016 Slide 1 Acknowledgemens The maerial in his lecure
Embedded Sysems and Sofware A Simple Inroducion o Embedded Conrol Sysems (PID Conrol) Embedded Sysems and Sofware, ECE:3360. The Universiy of Iowa, 2016 Slide 1 Acknowledgemens The maerial in his lecure
More Digital Logic. t p output. Low-to-high and high-to-low transitions could have different t p. V in (t)
") EECS 4 Spring 23 Lecure 2 EECS 4 Spring 23 Lecure 2 More igial Logic Gae delay and signal propagaion Clocked circui elemens (flip-flop) Wriing a word o memory Simplifying digial circuis: Karnaugh maps
EECS 4 Spring 23 Lecure 2 EECS 4 Spring 23 Lecure 2 More igial Logic Gae delay and signal propagaion Clocked circui elemens (flip-flop) Wriing a word o memory Simplifying digial circuis: Karnaugh maps
EE 301 Lab 2 Convolution
 EE 301 Lab 2 Convoluion 1 Inroducion In his lab we will gain some more experience wih he convoluion inegral and creae a scrip ha shows he graphical mehod of convoluion. 2 Wha you will learn This lab will
EE 301 Lab 2 Convoluion 1 Inroducion In his lab we will gain some more experience wih he convoluion inegral and creae a scrip ha shows he graphical mehod of convoluion. 2 Wha you will learn This lab will
The problem with linear regulators
 he problem wih linear regulaors i in P in = i in V REF R a i ref i q i C v CE P o = i o i B ie P = v i o o in R 1 R 2 i o i f η = P o P in iref is small ( 0). iq (quiescen curren) is small (probably).
he problem wih linear regulaors i in P in = i in V REF R a i ref i q i C v CE P o = i o i B ie P = v i o o in R 1 R 2 i o i f η = P o P in iref is small ( 0). iq (quiescen curren) is small (probably).
Silicon Controlled Rectifiers UNIT-1
 Silicon Conrolled Recifiers UNIT-1 Silicon Conrolled Recifier A Silicon Conrolled Recifier (or Semiconducor Conrolled Recifier) is a four layer solid sae device ha conrols curren flow The name silicon
Silicon Conrolled Recifiers UNIT-1 Silicon Conrolled Recifier A Silicon Conrolled Recifier (or Semiconducor Conrolled Recifier) is a four layer solid sae device ha conrols curren flow The name silicon
CHAPTER 12 DIRECT CURRENT CIRCUITS
 CHAPTER 12 DIRECT CURRENT CIUITS DIRECT CURRENT CIUITS 257 12.1 RESISTORS IN SERIES AND IN PARALLEL When wo resisors are conneced ogeher as shown in Figure 12.1 we said ha hey are conneced in series. As
CHAPTER 12 DIRECT CURRENT CIUITS DIRECT CURRENT CIUITS 257 12.1 RESISTORS IN SERIES AND IN PARALLEL When wo resisors are conneced ogeher as shown in Figure 12.1 we said ha hey are conneced in series. As
Q.1 Define work and its unit?
 CHP # 6 ORK AND ENERGY Q.1 Define work and is uni? A. ORK I can be define as when we applied a force on a body and he body covers a disance in he direcion of force, hen we say ha work is done. I is a scalar
CHP # 6 ORK AND ENERGY Q.1 Define work and is uni? A. ORK I can be define as when we applied a force on a body and he body covers a disance in he direcion of force, hen we say ha work is done. I is a scalar
Viterbi Algorithm: Background
 Vierbi Algorihm: Background Jean Mark Gawron March 24, 2014 1 The Key propery of an HMM Wha is an HMM. Formally, i has he following ingrediens: 1. a se of saes: S 2. a se of final saes: F 3. an iniial
Vierbi Algorihm: Background Jean Mark Gawron March 24, 2014 1 The Key propery of an HMM Wha is an HMM. Formally, i has he following ingrediens: 1. a se of saes: S 2. a se of final saes: F 3. an iniial
Applications of Memristors in ANNs
 Applications of Memristors in ANNs Outline Brief intro to ANNs Firing rate networks Single layer perceptron experiment Other (simulation) examples Spiking networks and STDP ANNs ANN is bio inpsired inpsired
Applications of Memristors in ANNs Outline Brief intro to ANNs Firing rate networks Single layer perceptron experiment Other (simulation) examples Spiking networks and STDP ANNs ANN is bio inpsired inpsired
CSE 3802 / ECE Numerical Methods in Scientific Computation. Jinbo Bi. Department of Computer Science & Engineering
 CSE 3802 / ECE 3431 Numerical Mehods in Scienific Compuaion Jinbo Bi Deparmen of Compuer Science & Engineering hp://www.engr.uconn.edu/~jinbo 1 Ph.D in Mahemaics The Insrucor Previous professional experience:
CSE 3802 / ECE 3431 Numerical Mehods in Scienific Compuaion Jinbo Bi Deparmen of Compuer Science & Engineering hp://www.engr.uconn.edu/~jinbo 1 Ph.D in Mahemaics The Insrucor Previous professional experience:
Article from. Predictive Analytics and Futurism. July 2016 Issue 13
 Aricle from Predicive Analyics and Fuurism July 6 Issue An Inroducion o Incremenal Learning By Qiang Wu and Dave Snell Machine learning provides useful ools for predicive analyics The ypical machine learning
Aricle from Predicive Analyics and Fuurism July 6 Issue An Inroducion o Incremenal Learning By Qiang Wu and Dave Snell Machine learning provides useful ools for predicive analyics The ypical machine learning
Sequential Logic. Digital Integrated Circuits A Design Perspective. Latch versus Register. Naming Conventions. Designing Sequential Logic Circuits
 esigning Sequenial Logic Circuis Adaped from Chaper 7 of igial egraed Circuis A esign Perspecive Jan M. Rabaey e al. Copyrigh 23 Prenice Hall/Pearson Sequenial Logic pus Curren Sae COMBINATIONAL LOGIC
esigning Sequenial Logic Circuis Adaped from Chaper 7 of igial egraed Circuis A esign Perspecive Jan M. Rabaey e al. Copyrigh 23 Prenice Hall/Pearson Sequenial Logic pus Curren Sae COMBINATIONAL LOGIC
Phys1112: DC and RC circuits
 Name: Group Members: Dae: TA s Name: Phys1112: DC and RC circuis Objecives: 1. To undersand curren and volage characerisics of a DC RC discharging circui. 2. To undersand he effec of he RC ime consan.
Name: Group Members: Dae: TA s Name: Phys1112: DC and RC circuis Objecives: 1. To undersand curren and volage characerisics of a DC RC discharging circui. 2. To undersand he effec of he RC ime consan.
Direct Current Circuits. February 19, 2014 Physics for Scientists & Engineers 2, Chapter 26 1
 Direc Curren Circuis February 19, 2014 Physics for Scieniss & Engineers 2, Chaper 26 1 Ammeers and Volmeers! A device used o measure curren is called an ammeer! A device used o measure poenial difference
Direc Curren Circuis February 19, 2014 Physics for Scieniss & Engineers 2, Chaper 26 1 Ammeers and Volmeers! A device used o measure curren is called an ammeer! A device used o measure poenial difference
Semiconductor Devices. C. Hu: Modern Semiconductor Devices for Integrated Circuits Chapter 6
 Semiconducor Devices C. Hu: Modern Semiconducor Devices for Inegraed Circuis Chaper 6 For hose of you who are sudying a bachelor level and need he old course S-69.2111 Mikro- ja nanoelekroniikan perusee
Semiconducor Devices C. Hu: Modern Semiconducor Devices for Inegraed Circuis Chaper 6 For hose of you who are sudying a bachelor level and need he old course S-69.2111 Mikro- ja nanoelekroniikan perusee
Linear Response Theory: The connection between QFT and experiments
 Phys540.nb 39 3 Linear Response Theory: The connecion beween QFT and experimens 3.1. Basic conceps and ideas Q: How do we measure he conduciviy of a meal? A: we firs inroduce a weak elecric field E, and
Phys540.nb 39 3 Linear Response Theory: The connecion beween QFT and experimens 3.1. Basic conceps and ideas Q: How do we measure he conduciviy of a meal? A: we firs inroduce a weak elecric field E, and
An recursive analytical technique to estimate time dependent physical parameters in the presence of noise processes
 WHAT IS A KALMAN FILTER An recursive analyical echnique o esimae ime dependen physical parameers in he presence of noise processes Example of a ime and frequency applicaion: Offse beween wo clocks PREDICTORS,
WHAT IS A KALMAN FILTER An recursive analyical echnique o esimae ime dependen physical parameers in he presence of noise processes Example of a ime and frequency applicaion: Offse beween wo clocks PREDICTORS,
The field of mathematics has made tremendous impact on the study of
 A Populaion Firing Rae Model of Reverberaory Aciviy in Neuronal Neworks Zofia Koscielniak Carnegie Mellon Universiy Menor: Dr. G. Bard Ermenrou Universiy of Pisburgh Inroducion: The field of mahemaics
A Populaion Firing Rae Model of Reverberaory Aciviy in Neuronal Neworks Zofia Koscielniak Carnegie Mellon Universiy Menor: Dr. G. Bard Ermenrou Universiy of Pisburgh Inroducion: The field of mahemaics
Lab 10: RC, RL, and RLC Circuits
 Lab 10: RC, RL, and RLC Circuis In his experimen, we will invesigae he behavior of circuis conaining combinaions of resisors, capaciors, and inducors. We will sudy he way volages and currens change in
Lab 10: RC, RL, and RLC Circuis In his experimen, we will invesigae he behavior of circuis conaining combinaions of resisors, capaciors, and inducors. We will sudy he way volages and currens change in
Hardware-Software Co-design of Slimmed Optical Neural Networks
 Hardware-Sofware Co-design of Slimmed Opical Neural Neworks Zheng Zhao 1, Derong Liu 1, Meng Li 1, Zhoufeng Ying 1, Lu Zhang 2, Biying Xu 1, Bei Yu 2, Ray Chen 1, David Pan 1 The Universiy of Texas a Ausin
Hardware-Sofware Co-design of Slimmed Opical Neural Neworks Zheng Zhao 1, Derong Liu 1, Meng Li 1, Zhoufeng Ying 1, Lu Zhang 2, Biying Xu 1, Bei Yu 2, Ray Chen 1, David Pan 1 The Universiy of Texas a Ausin
R.#W.#Erickson# Department#of#Electrical,#Computer,#and#Energy#Engineering# University#of#Colorado,#Boulder#
 .#W.#Erickson# Deparmen#of#Elecrical,#Compuer,#and#Energy#Engineering# Universiy#of#Colorado,#Boulder# Chaper 2 Principles of Seady-Sae Converer Analysis 2.1. Inroducion 2.2. Inducor vol-second balance,
.#W.#Erickson# Deparmen#of#Elecrical,#Compuer,#and#Energy#Engineering# Universiy#of#Colorado,#Boulder# Chaper 2 Principles of Seady-Sae Converer Analysis 2.1. Inroducion 2.2. Inducor vol-second balance,
8. Basic RL and RC Circuits
 8. Basic L and C Circuis This chaper deals wih he soluions of he responses of L and C circuis The analysis of C and L circuis leads o a linear differenial equaion This chaper covers he following opics
8. Basic L and C Circuis This chaper deals wih he soluions of he responses of L and C circuis The analysis of C and L circuis leads o a linear differenial equaion This chaper covers he following opics
From Particles to Rigid Bodies
 Rigid Body Dynamics From Paricles o Rigid Bodies Paricles No roaions Linear velociy v only Rigid bodies Body roaions Linear velociy v Angular velociy ω Rigid Bodies Rigid bodies have boh a posiion and
Rigid Body Dynamics From Paricles o Rigid Bodies Paricles No roaions Linear velociy v only Rigid bodies Body roaions Linear velociy v Angular velociy ω Rigid Bodies Rigid bodies have boh a posiion and
Temperature monitoring relays Table of contents
 Temperaure monioring relays Table of conens Temperaure monioring relays Temperaure monioring relays 50 Benefis and advanages, Applicaions 5 Operaing conrols 5 Selecion 53 Ordering deails 54 Funcion diagrams
Temperaure monioring relays Table of conens Temperaure monioring relays Temperaure monioring relays 50 Benefis and advanages, Applicaions 5 Operaing conrols 5 Selecion 53 Ordering deails 54 Funcion diagrams
An introduction to the theory of SDDP algorithm
 An inroducion o he heory of SDDP algorihm V. Leclère (ENPC) Augus 1, 2014 V. Leclère Inroducion o SDDP Augus 1, 2014 1 / 21 Inroducion Large scale sochasic problem are hard o solve. Two ways of aacking
An inroducion o he heory of SDDP algorihm V. Leclère (ENPC) Augus 1, 2014 V. Leclère Inroducion o SDDP Augus 1, 2014 1 / 21 Inroducion Large scale sochasic problem are hard o solve. Two ways of aacking
Chapter 7 Response of First-order RL and RC Circuits
 Chaper 7 Response of Firs-order RL and RC Circuis 7.- The Naural Response of RL and RC Circuis 7.3 The Sep Response of RL and RC Circuis 7.4 A General Soluion for Sep and Naural Responses 7.5 Sequenial
Chaper 7 Response of Firs-order RL and RC Circuis 7.- The Naural Response of RL and RC Circuis 7.3 The Sep Response of RL and RC Circuis 7.4 A General Soluion for Sep and Naural Responses 7.5 Sequenial
Micrologic Control units 2.0 and 5.0 Low Voltage Products
 Micrologic Conol unis.0 and 5.0 Low Volage Producs User manual We do more wih eleciciy. Micrologic Conol unis.0 and 5.0 Discovering your conol uni Idenifying your conol uni Overview of funcions 4 Seing
Micrologic Conol unis.0 and 5.0 Low Volage Producs User manual We do more wih eleciciy. Micrologic Conol unis.0 and 5.0 Discovering your conol uni Idenifying your conol uni Overview of funcions 4 Seing
EECE 301 Signals & Systems Prof. Mark Fowler
 EECE 3 Signals & Sysems Prof. Mark Fowler Noe Se # Wha are Coninuous-Time Signals??? /6 Coninuous-Time Signal Coninuous Time (C-T) Signal: A C-T signal is defined on he coninuum of ime values. Tha is:
EECE 3 Signals & Sysems Prof. Mark Fowler Noe Se # Wha are Coninuous-Time Signals??? /6 Coninuous-Time Signal Coninuous Time (C-T) Signal: A C-T signal is defined on he coninuum of ime values. Tha is:
Module 4: Time Response of discrete time systems Lecture Note 2
 Module 4: Time Response of discree ime sysems Lecure Noe 2 1 Prooype second order sysem The sudy of a second order sysem is imporan because many higher order sysem can be approimaed by a second order model
Module 4: Time Response of discree ime sysems Lecure Noe 2 1 Prooype second order sysem The sudy of a second order sysem is imporan because many higher order sysem can be approimaed by a second order model
Dual Current-Mode Control for Single-Switch Two-Output Switching Power Converters
 Dual Curren-Mode Conrol for Single-Swich Two-Oupu Swiching Power Converers S. C. Wong, C. K. Tse and K. C. Tang Deparmen of Elecronic and Informaion Engineering Hong Kong Polyechnic Universiy, Hunghom,
Dual Curren-Mode Conrol for Single-Swich Two-Oupu Swiching Power Converers S. C. Wong, C. K. Tse and K. C. Tang Deparmen of Elecronic and Informaion Engineering Hong Kong Polyechnic Universiy, Hunghom,
EE100 Lab 3 Experiment Guide: RC Circuits
 I. Inroducion EE100 Lab 3 Experimen Guide: A. apaciors A capacior is a passive elecronic componen ha sores energy in he form of an elecrosaic field. The uni of capaciance is he farad (coulomb/vol). Pracical
I. Inroducion EE100 Lab 3 Experimen Guide: A. apaciors A capacior is a passive elecronic componen ha sores energy in he form of an elecrosaic field. The uni of capaciance is he farad (coulomb/vol). Pracical
2.4 Cuk converter example
 2.4 Cuk converer example C 1 Cuk converer, wih ideal swich i 1 i v 1 2 1 2 C 2 v 2 Cuk converer: pracical realizaion using MOSFET and diode C 1 i 1 i v 1 2 Q 1 D 1 C 2 v 2 28 Analysis sraegy This converer
2.4 Cuk converer example C 1 Cuk converer, wih ideal swich i 1 i v 1 2 1 2 C 2 v 2 Cuk converer: pracical realizaion using MOSFET and diode C 1 i 1 i v 1 2 Q 1 D 1 C 2 v 2 28 Analysis sraegy This converer
Electrical and current self-induction
 Elecrical and curren self-inducion F. F. Mende hp://fmnauka.narod.ru/works.hml mende_fedor@mail.ru Absrac The aricle considers he self-inducance of reacive elemens. Elecrical self-inducion To he laws of
Elecrical and curren self-inducion F. F. Mende hp://fmnauka.narod.ru/works.hml mende_fedor@mail.ru Absrac The aricle considers he self-inducance of reacive elemens. Elecrical self-inducion To he laws of
Open loop vs Closed Loop. Example: Open Loop. Example: Feedforward Control. Advanced Control I
 Open loop vs Closed Loop Advanced I Moor Command Movemen Overview Open Loop vs Closed Loop Some examples Useful Open Loop lers Dynamical sysems CPG (biologically inspired ), Force Fields Feedback conrol
Open loop vs Closed Loop Advanced I Moor Command Movemen Overview Open Loop vs Closed Loop Some examples Useful Open Loop lers Dynamical sysems CPG (biologically inspired ), Force Fields Feedback conrol
Modal identification of structures from roving input data by means of maximum likelihood estimation of the state space model
 Modal idenificaion of srucures from roving inpu daa by means of maximum likelihood esimaion of he sae space model J. Cara, J. Juan, E. Alarcón Absrac The usual way o perform a forced vibraion es is o fix
Modal idenificaion of srucures from roving inpu daa by means of maximum likelihood esimaion of he sae space model J. Cara, J. Juan, E. Alarcón Absrac The usual way o perform a forced vibraion es is o fix
Notes 04 largely plagiarized by %khc
 Noes 04 largely plagiarized by %khc Convoluion Recap Some ricks: x() () =x() x() (, 0 )=x(, 0 ) R ț x() u() = x( )d x() () =ẋ() This hen ells us ha an inegraor has impulse response h() =u(), and ha a differeniaor
Noes 04 largely plagiarized by %khc Convoluion Recap Some ricks: x() () =x() x() (, 0 )=x(, 0 ) R ț x() u() = x( )d x() () =ẋ() This hen ells us ha an inegraor has impulse response h() =u(), and ha a differeniaor
3.1.3 INTRODUCTION TO DYNAMIC OPTIMIZATION: DISCRETE TIME PROBLEMS. A. The Hamiltonian and First-Order Conditions in a Finite Time Horizon
 3..3 INRODUCION O DYNAMIC OPIMIZAION: DISCREE IME PROBLEMS A. he Hamilonian and Firs-Order Condiions in a Finie ime Horizon Define a new funcion, he Hamilonian funcion, H. H he change in he oal value of
3..3 INRODUCION O DYNAMIC OPIMIZAION: DISCREE IME PROBLEMS A. he Hamilonian and Firs-Order Condiions in a Finie ime Horizon Define a new funcion, he Hamilonian funcion, H. H he change in he oal value of
INDEX. Transient analysis 1 Initial Conditions 1
 INDEX Secion Page Transien analysis 1 Iniial Condiions 1 Please inform me of your opinion of he relaive emphasis of he review maerial by simply making commens on his page and sending i o me a: Frank Mera
INDEX Secion Page Transien analysis 1 Iniial Condiions 1 Please inform me of your opinion of he relaive emphasis of he review maerial by simply making commens on his page and sending i o me a: Frank Mera
Lecture 3: Exponential Smoothing
 NATCOR: Forecasing & Predicive Analyics Lecure 3: Exponenial Smoohing John Boylan Lancaser Cenre for Forecasing Deparmen of Managemen Science Mehods and Models Forecasing Mehod A (numerical) procedure
NATCOR: Forecasing & Predicive Analyics Lecure 3: Exponenial Smoohing John Boylan Lancaser Cenre for Forecasing Deparmen of Managemen Science Mehods and Models Forecasing Mehod A (numerical) procedure
EECE 301 Signals & Systems Prof. Mark Fowler
 EECE 31 Signals & Sysems Prof. Mark Fowler Noe Se #1 C-T Sysems: Convoluion Represenaion Reading Assignmen: Secion 2.6 of Kamen and Heck 1/11 Course Flow Diagram The arrows here show concepual flow beween
EECE 31 Signals & Sysems Prof. Mark Fowler Noe Se #1 C-T Sysems: Convoluion Represenaion Reading Assignmen: Secion 2.6 of Kamen and Heck 1/11 Course Flow Diagram The arrows here show concepual flow beween
EE202 Circuit Theory II , Spring. Dr. Yılmaz KALKAN & Dr. Atilla DÖNÜK
 EE202 Circui Theory II 2018 2019, Spring Dr. Yılmaz KALKAN & Dr. Ailla DÖNÜK 1. Basic Conceps (Chaper 1 of Nilsson - 3 Hrs.) Inroducion, Curren and Volage, Power and Energy 2. Basic Laws (Chaper 2&3 of
EE202 Circui Theory II 2018 2019, Spring Dr. Yılmaz KALKAN & Dr. Ailla DÖNÜK 1. Basic Conceps (Chaper 1 of Nilsson - 3 Hrs.) Inroducion, Curren and Volage, Power and Energy 2. Basic Laws (Chaper 2&3 of
Chapter 8 The Complete Response of RL and RC Circuits
 Chaper 8 The Complee Response of RL and RC Circuis Seoul Naional Universiy Deparmen of Elecrical and Compuer Engineering Wha is Firs Order Circuis? Circuis ha conain only one inducor or only one capacior
Chaper 8 The Complee Response of RL and RC Circuis Seoul Naional Universiy Deparmen of Elecrical and Compuer Engineering Wha is Firs Order Circuis? Circuis ha conain only one inducor or only one capacior
Chapter 2: Principles of steady-state converter analysis
 Chaper 2 Principles of Seady-Sae Converer Analysis 2.1. Inroducion 2.2. Inducor vol-second balance, capacior charge balance, and he small ripple approximaion 2.3. Boos converer example 2.4. Cuk converer
Chaper 2 Principles of Seady-Sae Converer Analysis 2.1. Inroducion 2.2. Inducor vol-second balance, capacior charge balance, and he small ripple approximaion 2.3. Boos converer example 2.4. Cuk converer
Zürich. ETH Master Course: L Autonomous Mobile Robots Localization II
 Roland Siegwar Margaria Chli Paul Furgale Marco Huer Marin Rufli Davide Scaramuzza ETH Maser Course: 151-0854-00L Auonomous Mobile Robos Localizaion II ACT and SEE For all do, (predicion updae / ACT),
Roland Siegwar Margaria Chli Paul Furgale Marco Huer Marin Rufli Davide Scaramuzza ETH Maser Course: 151-0854-00L Auonomous Mobile Robos Localizaion II ACT and SEE For all do, (predicion updae / ACT),
Block Diagram of a DCS in 411
 Informaion source Forma A/D From oher sources Pulse modu. Muliplex Bandpass modu. X M h: channel impulse response m i g i s i Digial inpu Digial oupu iming and synchronizaion Digial baseband/ bandpass
Informaion source Forma A/D From oher sources Pulse modu. Muliplex Bandpass modu. X M h: channel impulse response m i g i s i Digial inpu Digial oupu iming and synchronizaion Digial baseband/ bandpass
Outline. Chapter 2: DC & Transient Response. Introduction to CMOS VLSI. DC Response. Transient Response Delay Estimation
 Inroducion o CMOS VLSI Design Chaper : DC & Transien Response David Harris, 004 Updaed by Li Chen, 010 Ouline DC Response Logic Levels and Noise Margins Transien Response Delay Esimaion Slide 1 Aciviy
Inroducion o CMOS VLSI Design Chaper : DC & Transien Response David Harris, 004 Updaed by Li Chen, 010 Ouline DC Response Logic Levels and Noise Margins Transien Response Delay Esimaion Slide 1 Aciviy
Neuromorphic computing with Memristive devices. NCM group
 Neuromorphic computing with Memristive devices NCM group Why neuromorphic? New needs for computing Recognition, Mining, Synthesis (Intel) Increase of Fault (nanoscale engineering) SEMICONDUCTOR TECHNOLOGY
Neuromorphic computing with Memristive devices NCM group Why neuromorphic? New needs for computing Recognition, Mining, Synthesis (Intel) Increase of Fault (nanoscale engineering) SEMICONDUCTOR TECHNOLOGY
Lecture -14: Chopper fed DC Drives
 Lecure -14: Chopper fed DC Drives Chopper fed DC drives o A chopper is a saic device ha convers fixed DC inpu volage o a variable dc oupu volage direcly o A chopper is a high speed on/off semiconducor
Lecure -14: Chopper fed DC Drives Chopper fed DC drives o A chopper is a saic device ha convers fixed DC inpu volage o a variable dc oupu volage direcly o A chopper is a high speed on/off semiconducor
ECE 2100 Circuit Analysis
 ECE 1 Circui Analysis Lesson 35 Chaper 8: Second Order Circuis Daniel M. Liynski, Ph.D. ECE 1 Circui Analysis Lesson 3-34 Chaper 7: Firs Order Circuis (Naural response RC & RL circuis, Singulariy funcions,
ECE 1 Circui Analysis Lesson 35 Chaper 8: Second Order Circuis Daniel M. Liynski, Ph.D. ECE 1 Circui Analysis Lesson 3-34 Chaper 7: Firs Order Circuis (Naural response RC & RL circuis, Singulariy funcions,
PI5A3157. SOTINY TM Low Voltage SPDT Analog Switch 2:1 Mux/Demux Bus Switch. Features. Descriptio n. Applications. Connection Diagram Pin Description
 PI53157 OINY M Low Volage PD nalog wich 2:1 Mux/Demux Bus wich Feaures CMO echnology for Bus and nalog pplicaions Low ON Resisance: 8-ohms a 3.0V Wide Range: 1.65V o 5.5V Rail-o-Rail ignal Range Conrol
PI53157 OINY M Low Volage PD nalog wich 2:1 Mux/Demux Bus wich Feaures CMO echnology for Bus and nalog pplicaions Low ON Resisance: 8-ohms a 3.0V Wide Range: 1.65V o 5.5V Rail-o-Rail ignal Range Conrol
EECE251. Circuit Analysis I. Set 4: Capacitors, Inductors, and First-Order Linear Circuits
 EEE25 ircui Analysis I Se 4: apaciors, Inducors, and Firs-Order inear ircuis Shahriar Mirabbasi Deparmen of Elecrical and ompuer Engineering Universiy of Briish olumbia shahriar@ece.ubc.ca Overview Passive
EEE25 ircui Analysis I Se 4: apaciors, Inducors, and Firs-Order inear ircuis Shahriar Mirabbasi Deparmen of Elecrical and ompuer Engineering Universiy of Briish olumbia shahriar@ece.ubc.ca Overview Passive
6.01: Introduction to EECS I Lecture 8 March 29, 2011
 6.01: Inroducion o EES I Lecure 8 March 29, 2011 6.01: Inroducion o EES I Op-Amps Las Time: The ircui Absracion ircuis represen sysems as connecions of elemens hrough which currens (hrough variables) flow
6.01: Inroducion o EES I Lecure 8 March 29, 2011 6.01: Inroducion o EES I Op-Amps Las Time: The ircui Absracion ircuis represen sysems as connecions of elemens hrough which currens (hrough variables) flow
04. Kinetics of a second order reaction
 4. Kineics of a second order reacion Imporan conceps Reacion rae, reacion exen, reacion rae equaion, order of a reacion, firs-order reacions, second-order reacions, differenial and inegraed rae laws, Arrhenius
4. Kineics of a second order reacion Imporan conceps Reacion rae, reacion exen, reacion rae equaion, order of a reacion, firs-order reacions, second-order reacions, differenial and inegraed rae laws, Arrhenius
Vehicle Arrival Models : Headway
 Chaper 12 Vehicle Arrival Models : Headway 12.1 Inroducion Modelling arrival of vehicle a secion of road is an imporan sep in raffic flow modelling. I has imporan applicaion in raffic flow simulaion where
Chaper 12 Vehicle Arrival Models : Headway 12.1 Inroducion Modelling arrival of vehicle a secion of road is an imporan sep in raffic flow modelling. I has imporan applicaion in raffic flow simulaion where
Math Week 14 April 16-20: sections first order systems of linear differential equations; 7.4 mass-spring systems.
 Mah 2250-004 Week 4 April 6-20 secions 7.-7.3 firs order sysems of linear differenial equaions; 7.4 mass-spring sysems. Mon Apr 6 7.-7.2 Sysems of differenial equaions (7.), and he vecor Calculus we need
Mah 2250-004 Week 4 April 6-20 secions 7.-7.3 firs order sysems of linear differenial equaions; 7.4 mass-spring sysems. Mon Apr 6 7.-7.2 Sysems of differenial equaions (7.), and he vecor Calculus we need
Chapter 2. Models, Censoring, and Likelihood for Failure-Time Data
 Chaper 2 Models, Censoring, and Likelihood for Failure-Time Daa William Q. Meeker and Luis A. Escobar Iowa Sae Universiy and Louisiana Sae Universiy Copyrigh 1998-2008 W. Q. Meeker and L. A. Escobar. Based
Chaper 2 Models, Censoring, and Likelihood for Failure-Time Daa William Q. Meeker and Luis A. Escobar Iowa Sae Universiy and Louisiana Sae Universiy Copyrigh 1998-2008 W. Q. Meeker and L. A. Escobar. Based
Pulse Generators. Any of the following calculations may be asked in the midterms/exam.
 ulse Generaors ny of he following calculaions may be asked in he miderms/exam.. a) capacior of wha capaciance forms an RC circui of s ime consan wih a 0 MΩ resisor? b) Wha percenage of he iniial volage
ulse Generaors ny of he following calculaions may be asked in he miderms/exam.. a) capacior of wha capaciance forms an RC circui of s ime consan wih a 0 MΩ resisor? b) Wha percenage of he iniial volage
CHBE320 LECTURE IV MATHEMATICAL MODELING OF CHEMICAL PROCESS. Professor Dae Ryook Yang
 CHBE320 LECTURE IV MATHEMATICAL MODELING OF CHEMICAL PROCESS Professor Dae Ryook Yang Spring 208 Dep. of Chemical and Biological Engineering CHBE320 Process Dynamics and Conrol 4- Road Map of he Lecure
CHBE320 LECTURE IV MATHEMATICAL MODELING OF CHEMICAL PROCESS Professor Dae Ryook Yang Spring 208 Dep. of Chemical and Biological Engineering CHBE320 Process Dynamics and Conrol 4- Road Map of he Lecure
Robotics I. April 11, The kinematics of a 3R spatial robot is specified by the Denavit-Hartenberg parameters in Tab. 1.
 Roboics I April 11, 017 Exercise 1 he kinemaics of a 3R spaial robo is specified by he Denavi-Harenberg parameers in ab 1 i α i d i a i θ i 1 π/ L 1 0 1 0 0 L 3 0 0 L 3 3 able 1: able of DH parameers of
Roboics I April 11, 017 Exercise 1 he kinemaics of a 3R spaial robo is specified by he Denavi-Harenberg parameers in ab 1 i α i d i a i θ i 1 π/ L 1 0 1 0 0 L 3 0 0 L 3 3 able 1: able of DH parameers of
Two Popular Bayesian Estimators: Particle and Kalman Filters. McGill COMP 765 Sept 14 th, 2017
 Two Popular Bayesian Esimaors: Paricle and Kalman Filers McGill COMP 765 Sep 14 h, 2017 1 1 1, dx x Bel x u x P x z P Recall: Bayes Filers,,,,,,, 1 1 1 1 u z u x P u z u x z P Bayes z = observaion u =
Two Popular Bayesian Esimaors: Paricle and Kalman Filers McGill COMP 765 Sep 14 h, 2017 1 1 1, dx x Bel x u x P x z P Recall: Bayes Filers,,,,,,, 1 1 1 1 u z u x P u z u x z P Bayes z = observaion u =
Simulation-Solving Dynamic Models ABE 5646 Week 2, Spring 2010
 Simulaion-Solving Dynamic Models ABE 5646 Week 2, Spring 2010 Week Descripion Reading Maerial 2 Compuer Simulaion of Dynamic Models Finie Difference, coninuous saes, discree ime Simple Mehods Euler Trapezoid
Simulaion-Solving Dynamic Models ABE 5646 Week 2, Spring 2010 Week Descripion Reading Maerial 2 Compuer Simulaion of Dynamic Models Finie Difference, coninuous saes, discree ime Simple Mehods Euler Trapezoid
Basic Principles of Sinusoidal Oscillators
 Basic Principles of Sinusoidal Oscillaors Linear oscillaor Linear region of circui : linear oscillaion Nonlinear region of circui : ampliudes sabilizaion Barkhausen crierion X S Amplifier A X O X f Frequency-selecive
Basic Principles of Sinusoidal Oscillaors Linear oscillaor Linear region of circui : linear oscillaion Nonlinear region of circui : ampliudes sabilizaion Barkhausen crierion X S Amplifier A X O X f Frequency-selecive
Chapter 1 Fundamental Concepts
 Chaper 1 Fundamenal Conceps 1 Signals A signal is a paern of variaion of a physical quaniy, ofen as a funcion of ime (bu also space, disance, posiion, ec). These quaniies are usually he independen variables
Chaper 1 Fundamenal Conceps 1 Signals A signal is a paern of variaion of a physical quaniy, ofen as a funcion of ime (bu also space, disance, posiion, ec). These quaniies are usually he independen variables
Introduction to Digital Circuits
 The NMOS nerer The NMOS Depleion oad 50 [ D ] µ A GS.0 + 40 30 0 0 Resisance characerisic of Q 3 4 5 6 GS 0.5 GS 0 GS 0.5 GS.0 GS.5 [ ] DS GS i 0 Q Q Depleion load Enhancemen drier Drain characerisic of
The NMOS nerer The NMOS Depleion oad 50 [ D ] µ A GS.0 + 40 30 0 0 Resisance characerisic of Q 3 4 5 6 GS 0.5 GS 0 GS 0.5 GS.0 GS.5 [ ] DS GS i 0 Q Q Depleion load Enhancemen drier Drain characerisic of
Reading from Young & Freedman: For this topic, read sections 25.4 & 25.5, the introduction to chapter 26 and sections 26.1 to 26.2 & 26.4.
 PHY1 Elecriciy Topic 7 (Lecures 1 & 11) Elecric Circuis n his opic, we will cover: 1) Elecromoive Force (EMF) ) Series and parallel resisor combinaions 3) Kirchhoff s rules for circuis 4) Time dependence
PHY1 Elecriciy Topic 7 (Lecures 1 & 11) Elecric Circuis n his opic, we will cover: 1) Elecromoive Force (EMF) ) Series and parallel resisor combinaions 3) Kirchhoff s rules for circuis 4) Time dependence
dv 7. Voltage-current relationship can be obtained by integrating both sides of i = C :
 EECE202 NETWORK ANALYSIS I Dr. Charles J. Kim Class Noe 22: Capaciors, Inducors, and Op Amp Circuis A. Capaciors. A capacior is a passive elemen designed o sored energy in is elecric field. 2. A capacior
EECE202 NETWORK ANALYSIS I Dr. Charles J. Kim Class Noe 22: Capaciors, Inducors, and Op Amp Circuis A. Capaciors. A capacior is a passive elemen designed o sored energy in is elecric field. 2. A capacior
L1, L2, N1 N2. + Vout. C out. Figure 2.1.1: Flyback converter
 page 11 Flyback converer The Flyback converer belongs o he primary swiched converer family, which means here is isolaion beween in and oupu. Flyback converers are used in nearly all mains supplied elecronic
page 11 Flyback converer The Flyback converer belongs o he primary swiched converer family, which means here is isolaion beween in and oupu. Flyback converers are used in nearly all mains supplied elecronic
Notes on Kalman Filtering
 Noes on Kalman Filering Brian Borchers and Rick Aser November 7, Inroducion Daa Assimilaion is he problem of merging model predicions wih acual measuremens of a sysem o produce an opimal esimae of he curren
Noes on Kalman Filering Brian Borchers and Rick Aser November 7, Inroducion Daa Assimilaion is he problem of merging model predicions wih acual measuremens of a sysem o produce an opimal esimae of he curren
Determination of the Sampling Period Required for a Fast Dynamic Response of DC-Motors
 Deerminaion of he Sampling Period Required for a Fas Dynamic Response of DC-Moors J. A. GA'EB, Deparmen of Elecrical and Compuer Eng, The Hashemie Universiy, P.O.Box 15459, Posal code 13115, Zerka, JORDAN
Deerminaion of he Sampling Period Required for a Fas Dynamic Response of DC-Moors J. A. GA'EB, Deparmen of Elecrical and Compuer Eng, The Hashemie Universiy, P.O.Box 15459, Posal code 13115, Zerka, JORDAN