Chapter 9. The Dot Product (Scalar Product) The Dot Product use (Scalar Product) The Dot Product (Scalar Product) The Cross Product.
|
|
|
- Coleen Lewis
- 5 years ago
- Views:
Transcription
1 The Dot Product (Scalar Product) Chapter 9 Statcs and Torque The dot product of two vectors can be constructed by takng the component of one vector n the drecton of the other and multplyng t tmes the magntude of the other vector. Ths can be epressed n the form: The Dot Product (Scalar Product) The Dot Product use (Scalar Product) Geometrcally, the scalar product s useful for fndng the drecton between arbtrary vectors n space. Snce the two epressons for the product: The Cross Product The magntude of the vector product of two vectors can be constructed by takng the product of the magntudes of the vectors tmes the sne of the angle (<180 degrees) between them. The magntude of the vector product can be epressed n the form: The Cross Product the drecton s gven by the rght-hand rule. If the vectors are epressed n terms of unt vectors, j, and k n the, y, and z drectons, then the vector product can be epressed n the rather cumbersome form: 1

")

2 The Cross Product (The Matr) Force vs. Torque A B A B A B ˆ a b ˆj a b y y kˆ a b z z a b y z z a b a b y a b z y y a b z a b Forces cause acceleratons Torques cause angular acceleratons Force and torque are related Torque The door s free to rotate about an as through O There are three factors that determne the effectveness of the force n openng the door: The magntude of the force The poston of the applcaton of the force The angle at whch the force s appled Torque Torque,, s the tendency of a force to rotate an object about some as F d s the torque symbol s the Greek letter tau F s the force d s the lever arm (or moment arm) Agan: Torque causes objects to rotate lke force causes object to move. SI Unts Newton meter = Nm Drecton of Torque Torque s a vector quantty The drecton s perpendcular to the plane determned by the lever arm and the force For two dmensonal problems, nto or out of the plane of the paper wll be suffcent If the turnng tendency of the force s counterclockwse, the torque wll be postve If the turnng tendency s clockwse, the torque wll be negatve Rght Hand Rule Pont the fngers n the drecton of the poston vector Curl the fngers toward the force vector The thumb ponts n the drecton of the torque 2

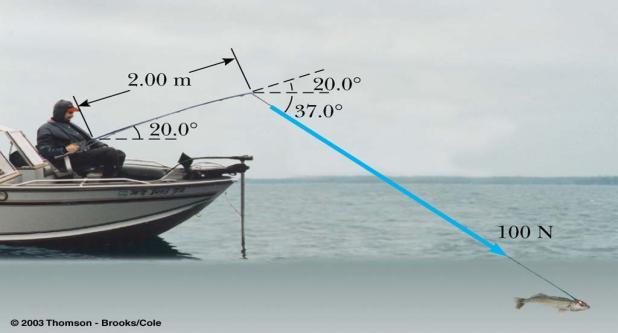
3 Lever Arm An Alternatve Look at Torque The lever arm, d, s the perpendcular dstance from the as of rotaton to a lne drawn from the as of rotaton to a lne drawn along the the drecton of the force d = L sn Φ What we are dong here s fnd the component of F that s perpendcular to L The force could also be resolved nto ts - and y- components The -component, F cos Φ, produces 0 torque The y-component, F sn Φ, produces a non-zero torque Torque, fnal equaton From the components of the force or from the lever arm, FLsn F s the force L s the dstance along the object Φ s the angle between the force and the object Net Torque The net torque s the sum of all the torques produced by all the forces Remember to account for the drecton of the tendency for rotaton Counterclockwse torques are postve Clockwse torques are negatve Torque and Equlbrum Frst Condton of Equlbrum The net eternal force must be zero F F 0 0 and F y Ths s a necessary, but not suffcent, condton to ensure that an object s n complete mechancal equlbrum Ths s a statement of translatonal equlbrum 0 Torque and Equlbrum, cont To ensure mechancal equlbrum, you need to ensure rotatonal equlbrum as well as translatonal The Second Condton of Equlbrum states The net eternal torque must be zero 0 3


4 Equlbrum Eample Mechancal Equlbrum The woman, mass m, sts on the left end of the see-saw The man, mass M, sts where the see-saw wll be balanced Apply the Second Condton of Equlbrum and solve for the unknown dstance, In ths case, the Frst Condton of Equlbrum s satsfed F N N The Second Condton s not satsfed Both forces would produce clockwse rotatons 500Nm 0 As of Rotaton If the object s n equlbrum, t does not matter where you put the as of rotaton (Pvot Pont) for calculatng the net torque The locaton of the as of rotaton s completely arbtrary Often the nature of the problem wll suggest a convenent locaton for the as When solvng a problem, you must specfy an as of rotaton Once you have chosen an as, you must mantan that choce consstently throughout the problem Center of Gravty (Center of Mass) The force of gravty actng on an object must be consdered In fndng the torque produced by the force of gravty, all of the weght of the object can be consdered to be concentrated at one pont In an object where all the mass s unformly dstrbuted, the center of mass s the geometrc centrod. Center of Gravty When suspended from a strng, an object wll always rotate so that ts center of gravty s drectly below the strng. Fg. 5.27, p. 141 Slde 30 4
 Each partcle wll have a set of coordnates ndcatng ts locaton (,y) Calculatng the Center")
5 Center of Mass: An object wll balance when ts center of mass s drectly above ts base of support. Calculatng the Center of Gravty The object s dvded up nto a large number of very small partcles of weght (mg) Each partcle wll have a set of coordnates ndcatng ts locaton (,y) Calculatng the Center of Gravty, cont. The torque produced by each partcle about the as of rotaton s equal to ts weght tmes ts lever arm Calculatng the Center of Gravty, cont. We wsh to locate the pont of applcaton of the sngle force, whose magntude s equal to the weght of the object, and whose effect on the rotaton s the same as all the ndvdual partcles. Ths pont s called the center of gravty of the object Coordnates of the Center of Gravty The coordnates of the center of gravty can be found from the sum of the torques actng on the ndvdual partcles beng set equal to the torque produced by the weght of the object cg m m and y cg m y m 5

6 Eample: An 8.0-kg mass s poston at = 2.0-m, a 5.0-kg mass s postoned at = 4.0-m, and a 2.0-kg mass s placed at = 12 m. Where s the center of mass of ths system? Soluton: An 8.0-kg mass s poston at = 2.0-m, a 5.0-kg mass s postoned at = 4.0-m, and a 2.0-kg mass s placed at = 12 m. Where s the center of mass of ths system? Center of Gravty of a Unform Object The center of gravty of a homogenous, symmetrc body must le on the as of symmetry. Often, the center of gravty of such an object s the geometrc center of the object. Epermentally Determnng the Center of Gravty The wrench s hung freely from two dfferent pvots The ntersecton of the lnes ndcates the center of gravty A rgd object can be balanced by a sngle force equal n magntude to ts weght as long as the force s actng upward through the object s center of gravty Whch sees more weght? The person has a mass of 80Kg and the board has a mass of 5kg. The persons center of mass s 8/10 of L/2. The person s 1.7m, the board s 2m. Both the board and the person are centered on the scale and the block. Notes About Equlbrum A zero net torque does not mean the absence of rotatonal moton An object that rotates at unform angular velocty can be under the nfluence of a zero net torque Ths s analogous to the translatonal stuaton where a zero net force does not mean the object s not n moton 6


 m1= 5 kg @ 2.")
 The chld has a mass of 60kg and the unform board")
7 Fg 8.12, p.228 Slde 17 Eample of a Free Body Dagram Isolate the object to be analyzed Draw the free body dagram for that object Include all the eternal forces actng on the object Eample of a Free Body Dagram The free body dagram ncludes the drectons of the forces The weghts act through the centers of gravty of ther objects Notce the components are calculated Try ths Torque Problem (Case I) m1= 5 2.0m m2= 0.5m 2.0m Try ths Torque Problem (Case II) The chld has a mass of 60kg and the unform board has length of 3m and s 5kg. The fulcrum s located 0.5m from the end of the board. How far away from the fulcrum must the chld st? How s ths torque changng wth X? 7





8 Why does ths bolder stay standng? Eample of Torque n Health Felds Eample of Torque n Health Felds Eample of Torque n Health Felds Torque n constructon Recreatonal Torque 8
, t undergoes an angular acceleraton The angular acceleraton s drectly proportonal to the net torque The relatonshp s")

9 Another Recreatonal Torque Try ths Problem (Case III) The guy on the left s 70kg and the guy on the rght s 78kg. The bucket s 5kg and the scaffoldng s 65kg. What s the force n each of the strngs? Torque and Angular Acceleraton When a rgd object s subject to a net torque ( 0), t undergoes an angular acceleraton The angular acceleraton s drectly proportonal to the net torque The relatonshp s analogous to F = ma Newton s Second Law Moment of Inerta The angular acceleraton s nversely proportonal to the analogy of the mass n a rotatng system Ths mass analog s called the moment of nerta, I, of the object I mr SI unts are kg m 2 2 Newton s Second Law for a Rotatng Object The angular acceleraton s drectly proportonal to the net torque The angular acceleraton s nversely proportonal to the moment of nerta of the object I More About Moment of Inerta There s a major dfference between moment of nerta and mass: the moment of nerta depends on the quantty of matter and ts dstrbuton n the rgd object. The moment of nerta also depends upon the locaton of the as of rotaton 9



10 Moment of Inerta of a Unform Rng Other Moments of Inerta Image the hoop s dvded nto a number of small segments, m 1 These segments are equdstant from the as I m r 2 MR 2 Eample, Newton s Second Law for Rotaton Draw free body dagrams of each object Only the cylnder s rotatng, so apply = I The bucket s fallng, but not rotatng, so apply F = m a Remember that a = r and solve the resultng equatons Rotatonal Knetc Energy An object rotatng about some as wth an angular speed, ω, has rotatonal knetc energy ½Iω 2 Energy concepts can be useful for smplfyng the analyss of rotatonal moton Total Energy of a System Conservaton of Mechancal Energy ( KE KE PE PE ) ( KE KE PE PE ) t r g s Remember, ths s for conservatve forces, no dsspatve forces such as frcton can be present t r g s f Work-Energy n a Rotatng System In the case where there are dsspatve forces such as frcton, use the generalzed Work- Energy Theorem nstead of Conservaton of Energy W nc = KE t + KE R + PE 10


 From: http://hyperphyscs.")
11 Angular Momentum Smlarly to the relatonshp between force and momentum n a lnear system, we can show the relatonshp between torque and angular momentum Angular momentum s defned as L = I ω L and t Angular Momentum, cont If the net torque s zero, the angular momentum remans constant Conservaton of Lnear Momentum states: The angular momentum of a system s conserved when the net eternal torque actng on the systems s zero. That s, when 0, L L f or I I f f Vector Nature of Angular Quanttes Rght Hand Rule / Screw Rule Assgn a postve or negatve drecton n the problem A more complete way s by usng the rght hand rule Grasp the as of rotaton wth your rght hand Wrap your fngers n the drecton of rotaton Your thumb ponts n the drecton of ω How all rotatonal quanttes are related Precesson Start by thnkng about the object not spnnng. Where would t fall. A wheel held up by the strng on the rght would fall down. Produced by a torque nto the screen (paper) From: From:



12 Precesson Net thnk about the object rotatng There would be a torque ponted to the rght, out of the wheel Precesson The dfference n these two torques (one down and one to the rght) s lke two forces one at 90 and another at 0. The resultant would be somethng n-between. The sum of these torques s somethng n-between. Snce there s a net torque, the object has an angular acceleraton n the drecton of the torque. From: From: Conservaton Rules, Summary In an solated system, the followng quanttes are conserved: Mechancal energy Lnear momentum Angular momentum Conservaton of Angular Momentum, Eample Wth hands and feet drawn closer to the body, the skater s angular speed ncreases L s conserved, I decreases, ncreases Machnes A machne s a devce that helps make work easer to perform by accomplshng one or more of the followng functons: transferrng a force from one place to another, changng the drecton of a force, ncreasng the magntude of a force, or ncreasng the dstance or speed of a force. Machnes Machnes do not reduce the amount of work for us, but they can make t easer. There are s types of smple machnes whch form the bass for all mechancal machnes today. 12


13 (Smple) Machnes The 6 smple machnes are: Lever Inclned plane Wheel and Ale Pulley Wedge Screw Quck Overvew of Each SIMPLE MACHINES LEVER INCLINED PLANE WHEEL AND AXLE WHAT IT IS A stff bar that rests on a support called a fulcrum A slantng surface connectng a lower level to a hgher level A wheel wth a rod, called an ael, through ts center: both parts move together HOW IT HELPS US WORK Lfts or moves loads Thngs move up or down t Lfts or moves loads EXAMPLES Shovel, nutcracker, seesaw, crow-bar, elbow Slde, stars, ramp, escalator Doorknob, pencl sharpener, bke Quck Overvew of Each SIMPLE MACHINES PULLEY WEDGE SCREW WHAT IT IS A grooved wheel wth a rope or cable around t A type of nclned plane wth a sharp edge. The wedge moves, the nclned plane stays stll. An nclned plane wrapped around a cylnder. Works wth a lever. HOW IT HELPS US WORK Moves thngs up, down, or across Pushes thngs apart Rases weghts, presses or fastens objects EXAMPLES Curtan rod, tow truck, mn-blnd, flag pole, crane Ae blade Screws, nuts Lever LEVER: The lever s a smple machne made wth a bar free to move about a fed pont called a fulcrum. There are three types of levers. A frst class lever s lke a teeter-totter or see-saw. One end wll lft an object (chld) up just as far as the other end s pushed down. A second class lever s lke a wheel barrow. The long handles of a wheel barrow are really the long arms of a lever. A thrd class lever s lke a fshng pole. When the pole s gven a tug, one end stays stll but the other end flps n the ar catchng the fsh. Inclned Plane INCLINED PLANE : An nclned plane s a smple machne wth no movng parts. It s smply a straght slanted surface. For eample: a ramp Wheel & Ale WHEEL AND AXLE : A wheel and ale s a modfcaton of a pulley. A wheel s fed to a shaft. The wheel and shaft must move together to be a smple machne. Sometmes the wheel has a crank or handle on t. Eamples of wheel and ales nclude roller skates and doorknobs. 13
.")


14 Pulley PULLEY: A pulley s a smple machne made wth a rope, belt or chan wrapped around a grooved wheel. A pulley works two ways. It can change the drecton of a force or t can change the amount of force. A fed pulley changes the drecton of the appled force. ( E. Rasng the flag ). A movable pulley s attached to the object you are movng. Wedge WEDGE: A wedge s a modfcaton of an nclned plane that moves. It s made of two nclned planes put together. Instead of the resstance beng moved up an nclned plane, the nclned plane moves the resstance. Screw SCREW : A screw s a smple machne that s lke an nclned plane. It s an nclned plane that wraps around a shaft. (Smple) Machnes A machne can never output more work (energy) than s put nto t. At best, Work out = Work n Work n Machne Work out Mechancal Advantage Machnes can t multply work or energy, but they can multply force. Mechancal advantage measures how much a machne multples force. MA = Force machne eerts Force you eert Effcency The effcency of a machne tells how much of the energy (work) that goes nto the machne actually does useful work. It s usually epressed as a percent. Effcency = Energy output Energy nput 100% 14
So far: simple (planar) geometries
 geometries") Physcs 06 ecture 5 Torque and Angular Momentum as Vectors SJ 7thEd.: Chap. to 3 Rotatonal quanttes as vectors Cross product Torque epressed as a vector Angular momentum defned Angular momentum as a vector
Physcs 06 ecture 5 Torque and Angular Momentum as Vectors SJ 7thEd.: Chap. to 3 Rotatonal quanttes as vectors Cross product Torque epressed as a vector Angular momentum defned Angular momentum as a vector
Physics 111: Mechanics Lecture 11
 Physcs 111: Mechancs Lecture 11 Bn Chen NJIT Physcs Department Textbook Chapter 10: Dynamcs of Rotatonal Moton q 10.1 Torque q 10. Torque and Angular Acceleraton for a Rgd Body q 10.3 Rgd-Body Rotaton
Physcs 111: Mechancs Lecture 11 Bn Chen NJIT Physcs Department Textbook Chapter 10: Dynamcs of Rotatonal Moton q 10.1 Torque q 10. Torque and Angular Acceleraton for a Rgd Body q 10.3 Rgd-Body Rotaton
Week 11: Chapter 11. The Vector Product. The Vector Product Defined. The Vector Product and Torque. More About the Vector Product
 The Vector Product Week 11: Chapter 11 Angular Momentum There are nstances where the product of two vectors s another vector Earler we saw where the product of two vectors was a scalar Ths was called the
The Vector Product Week 11: Chapter 11 Angular Momentum There are nstances where the product of two vectors s another vector Earler we saw where the product of two vectors was a scalar Ths was called the
Spring 2002 Lecture #13
 44-50 Sprng 00 ecture # Dr. Jaehoon Yu. Rotatonal Energy. Computaton of oments of nerta. Parallel-as Theorem 4. Torque & Angular Acceleraton 5. Work, Power, & Energy of Rotatonal otons Remember the md-term
44-50 Sprng 00 ecture # Dr. Jaehoon Yu. Rotatonal Energy. Computaton of oments of nerta. Parallel-as Theorem 4. Torque & Angular Acceleraton 5. Work, Power, & Energy of Rotatonal otons Remember the md-term
Chapter 11: Angular Momentum
 Chapter 11: ngular Momentum Statc Equlbrum In Chap. 4 we studed the equlbrum of pontobjects (mass m) wth the applcaton of Newton s aws F 0 F x y, 0 Therefore, no lnear (translatonal) acceleraton, a0 For
Chapter 11: ngular Momentum Statc Equlbrum In Chap. 4 we studed the equlbrum of pontobjects (mass m) wth the applcaton of Newton s aws F 0 F x y, 0 Therefore, no lnear (translatonal) acceleraton, a0 For
Conservation of Angular Momentum = "Spin"
 Page 1 of 6 Conservaton of Angular Momentum = "Spn" We can assgn a drecton to the angular velocty: drecton of = drecton of axs + rght hand rule (wth rght hand, curl fngers n drecton of rotaton, thumb ponts
Page 1 of 6 Conservaton of Angular Momentum = "Spn" We can assgn a drecton to the angular velocty: drecton of = drecton of axs + rght hand rule (wth rght hand, curl fngers n drecton of rotaton, thumb ponts
Part C Dynamics and Statics of Rigid Body. Chapter 5 Rotation of a Rigid Body About a Fixed Axis
 Part C Dynamcs and Statcs of Rgd Body Chapter 5 Rotaton of a Rgd Body About a Fxed Axs 5.. Rotatonal Varables 5.. Rotaton wth Constant Angular Acceleraton 5.3. Knetc Energy of Rotaton, Rotatonal Inerta
Part C Dynamcs and Statcs of Rgd Body Chapter 5 Rotaton of a Rgd Body About a Fxed Axs 5.. Rotatonal Varables 5.. Rotaton wth Constant Angular Acceleraton 5.3. Knetc Energy of Rotaton, Rotatonal Inerta
Physics 207: Lecture 20. Today s Agenda Homework for Monday
 Physcs 207: Lecture 20 Today s Agenda Homework for Monday Recap: Systems of Partcles Center of mass Velocty and acceleraton of the center of mass Dynamcs of the center of mass Lnear Momentum Example problems
Physcs 207: Lecture 20 Today s Agenda Homework for Monday Recap: Systems of Partcles Center of mass Velocty and acceleraton of the center of mass Dynamcs of the center of mass Lnear Momentum Example problems
Study Guide For Exam Two
 Study Gude For Exam Two Physcs 2210 Albretsen Updated: 08/02/2018 All Other Prevous Study Gudes Modules 01-06 Module 07 Work Work done by a constant force F over a dstance s : Work done by varyng force
Study Gude For Exam Two Physcs 2210 Albretsen Updated: 08/02/2018 All Other Prevous Study Gudes Modules 01-06 Module 07 Work Work done by a constant force F over a dstance s : Work done by varyng force
Week 9 Chapter 10 Section 1-5
 Week 9 Chapter 10 Secton 1-5 Rotaton Rgd Object A rgd object s one that s nondeformable The relatve locatons of all partcles makng up the object reman constant All real objects are deformable to some extent,
Week 9 Chapter 10 Secton 1-5 Rotaton Rgd Object A rgd object s one that s nondeformable The relatve locatons of all partcles makng up the object reman constant All real objects are deformable to some extent,
Important Dates: Post Test: Dec during recitations. If you have taken the post test, don t come to recitation!
 Important Dates: Post Test: Dec. 8 0 durng rectatons. If you have taken the post test, don t come to rectaton! Post Test Make-Up Sessons n ARC 03: Sat Dec. 6, 0 AM noon, and Sun Dec. 7, 8 PM 0 PM. Post
Important Dates: Post Test: Dec. 8 0 durng rectatons. If you have taken the post test, don t come to rectaton! Post Test Make-Up Sessons n ARC 03: Sat Dec. 6, 0 AM noon, and Sun Dec. 7, 8 PM 0 PM. Post
Physics 53. Rotational Motion 3. Sir, I have found you an argument, but I am not obliged to find you an understanding.
 Physcs 53 Rotatonal Moton 3 Sr, I have found you an argument, but I am not oblged to fnd you an understandng. Samuel Johnson Angular momentum Wth respect to rotatonal moton of a body, moment of nerta plays
Physcs 53 Rotatonal Moton 3 Sr, I have found you an argument, but I am not oblged to fnd you an understandng. Samuel Johnson Angular momentum Wth respect to rotatonal moton of a body, moment of nerta plays
Dynamics of Rotational Motion
 Dynamcs of Rotatonal Moton Torque: the rotatonal analogue of force Torque = force x moment arm = Fl moment arm = perpendcular dstance through whch the force acts a.k.a. leer arm l F l F l F l F = Fl =
Dynamcs of Rotatonal Moton Torque: the rotatonal analogue of force Torque = force x moment arm = Fl moment arm = perpendcular dstance through whch the force acts a.k.a. leer arm l F l F l F l F = Fl =
Rotational Dynamics. Physics 1425 Lecture 19. Michael Fowler, UVa
 Rotatonal Dynamcs Physcs 1425 Lecture 19 Mchael Fowler, UVa Rotatonal Dynamcs Newton s Frst Law: a rotatng body wll contnue to rotate at constant angular velocty as long as there s no torque actng on t.
Rotatonal Dynamcs Physcs 1425 Lecture 19 Mchael Fowler, UVa Rotatonal Dynamcs Newton s Frst Law: a rotatng body wll contnue to rotate at constant angular velocty as long as there s no torque actng on t.
Angular Momentum and Fixed Axis Rotation. 8.01t Nov 10, 2004
 Angular Momentum and Fxed Axs Rotaton 8.01t Nov 10, 2004 Dynamcs: Translatonal and Rotatonal Moton Translatonal Dynamcs Total Force Torque Angular Momentum about Dynamcs of Rotaton F ext Momentum of a
Angular Momentum and Fxed Axs Rotaton 8.01t Nov 10, 2004 Dynamcs: Translatonal and Rotatonal Moton Translatonal Dynamcs Total Force Torque Angular Momentum about Dynamcs of Rotaton F ext Momentum of a
Week3, Chapter 4. Position and Displacement. Motion in Two Dimensions. Instantaneous Velocity. Average Velocity
 Week3, Chapter 4 Moton n Two Dmensons Lecture Quz A partcle confned to moton along the x axs moves wth constant acceleraton from x =.0 m to x = 8.0 m durng a 1-s tme nterval. The velocty of the partcle
Week3, Chapter 4 Moton n Two Dmensons Lecture Quz A partcle confned to moton along the x axs moves wth constant acceleraton from x =.0 m to x = 8.0 m durng a 1-s tme nterval. The velocty of the partcle
First Law: A body at rest remains at rest, a body in motion continues to move at constant velocity, unless acted upon by an external force.
 Secton 1. Dynamcs (Newton s Laws of Moton) Two approaches: 1) Gven all the forces actng on a body, predct the subsequent (changes n) moton. 2) Gven the (changes n) moton of a body, nfer what forces act
Secton 1. Dynamcs (Newton s Laws of Moton) Two approaches: 1) Gven all the forces actng on a body, predct the subsequent (changes n) moton. 2) Gven the (changes n) moton of a body, nfer what forces act
Chapter 11 Torque and Angular Momentum
 Chapter Torque and Angular Momentum I. Torque II. Angular momentum - Defnton III. Newton s second law n angular form IV. Angular momentum - System of partcles - Rgd body - Conservaton I. Torque - Vector
Chapter Torque and Angular Momentum I. Torque II. Angular momentum - Defnton III. Newton s second law n angular form IV. Angular momentum - System of partcles - Rgd body - Conservaton I. Torque - Vector
Physics 181. Particle Systems
 Physcs 181 Partcle Systems Overvew In these notes we dscuss the varables approprate to the descrpton of systems of partcles, ther defntons, ther relatons, and ther conservatons laws. We consder a system
Physcs 181 Partcle Systems Overvew In these notes we dscuss the varables approprate to the descrpton of systems of partcles, ther defntons, ther relatons, and ther conservatons laws. We consder a system
Moments of Inertia. and reminds us of the analogous equation for linear momentum p= mv, which is of the form. The kinetic energy of the body is.
 Moments of Inerta Suppose a body s movng on a crcular path wth constant speed Let s consder two quanttes: the body s angular momentum L about the center of the crcle, and ts knetc energy T How are these
Moments of Inerta Suppose a body s movng on a crcular path wth constant speed Let s consder two quanttes: the body s angular momentum L about the center of the crcle, and ts knetc energy T How are these
Chapter 11 Angular Momentum
 Chapter 11 Angular Momentum Analyss Model: Nonsolated System (Angular Momentum) Angular Momentum of a Rotatng Rgd Object Analyss Model: Isolated System (Angular Momentum) Angular Momentum of a Partcle
Chapter 11 Angular Momentum Analyss Model: Nonsolated System (Angular Momentum) Angular Momentum of a Rotatng Rgd Object Analyss Model: Isolated System (Angular Momentum) Angular Momentum of a Partcle
CHAPTER 10 ROTATIONAL MOTION
 CHAPTER 0 ROTATONAL MOTON 0. ANGULAR VELOCTY Consder argd body rotates about a fxed axs through pont O n x-y plane as shown. Any partcle at pont P n ths rgd body rotates n a crcle of radus r about O. The
CHAPTER 0 ROTATONAL MOTON 0. ANGULAR VELOCTY Consder argd body rotates about a fxed axs through pont O n x-y plane as shown. Any partcle at pont P n ths rgd body rotates n a crcle of radus r about O. The
Chapter 8. Potential Energy and Conservation of Energy
 Chapter 8 Potental Energy and Conservaton of Energy In ths chapter we wll ntroduce the followng concepts: Potental Energy Conservatve and non-conservatve forces Mechancal Energy Conservaton of Mechancal
Chapter 8 Potental Energy and Conservaton of Energy In ths chapter we wll ntroduce the followng concepts: Potental Energy Conservatve and non-conservatve forces Mechancal Energy Conservaton of Mechancal
Rigid body simulation
 Rgd bod smulaton Rgd bod smulaton Once we consder an object wth spacal etent, partcle sstem smulaton s no longer suffcent Problems Problems Unconstraned sstem rotatonal moton torques and angular momentum
Rgd bod smulaton Rgd bod smulaton Once we consder an object wth spacal etent, partcle sstem smulaton s no longer suffcent Problems Problems Unconstraned sstem rotatonal moton torques and angular momentum
PHYS 1443 Section 003 Lecture #17
 PHYS 144 Secton 00 ecture #17 Wednesda, Oct. 9, 00 1. Rollng oton of a Rgd od. Torque. oment of Inerta 4. Rotatonal Knetc Energ 5. Torque and Vector Products Remember the nd term eam (ch 6 11), onda, Nov.!
PHYS 144 Secton 00 ecture #17 Wednesda, Oct. 9, 00 1. Rollng oton of a Rgd od. Torque. oment of Inerta 4. Rotatonal Knetc Energ 5. Torque and Vector Products Remember the nd term eam (ch 6 11), onda, Nov.!
A Tale of Friction Basic Rollercoaster Physics. Fahrenheit Rollercoaster, Hershey, PA max height = 121 ft max speed = 58 mph
 A Tale o Frcton Basc Rollercoaster Physcs Fahrenhet Rollercoaster, Hershey, PA max heght = 11 t max speed = 58 mph PLAY PLAY PLAY PLAY Rotatonal Movement Knematcs Smlar to how lnear velocty s dened, angular
A Tale o Frcton Basc Rollercoaster Physcs Fahrenhet Rollercoaster, Hershey, PA max heght = 11 t max speed = 58 mph PLAY PLAY PLAY PLAY Rotatonal Movement Knematcs Smlar to how lnear velocty s dened, angular
τ rf = Iα I point = mr 2 L35 F 11/14/14 a*er lecture 1
 A mass s attached to a long, massless rod. The mass s close to one end of the rod. Is t easer to balance the rod on end wth the mass near the top or near the bottom? Hnt: Small α means sluggsh behavor
A mass s attached to a long, massless rod. The mass s close to one end of the rod. Is t easer to balance the rod on end wth the mass near the top or near the bottom? Hnt: Small α means sluggsh behavor
Physics 231. Topic 8: Rotational Motion. Alex Brown October MSU Physics 231 Fall
 Physcs 231 Topc 8: Rotatonal Moton Alex Brown October 21-26 2015 MSU Physcs 231 Fall 2015 1 MSU Physcs 231 Fall 2015 2 MSU Physcs 231 Fall 2015 3 Key Concepts: Rotatonal Moton Rotatonal Kneatcs Equatons
Physcs 231 Topc 8: Rotatonal Moton Alex Brown October 21-26 2015 MSU Physcs 231 Fall 2015 1 MSU Physcs 231 Fall 2015 2 MSU Physcs 231 Fall 2015 3 Key Concepts: Rotatonal Moton Rotatonal Kneatcs Equatons
ENGN 40 Dynamics and Vibrations Homework # 7 Due: Friday, April 15
 NGN 40 ynamcs and Vbratons Homework # 7 ue: Frday, Aprl 15 1. Consder a concal hostng drum used n the mnng ndustry to host a mass up/down. A cable of dameter d has the mass connected at one end and s wound/unwound
NGN 40 ynamcs and Vbratons Homework # 7 ue: Frday, Aprl 15 1. Consder a concal hostng drum used n the mnng ndustry to host a mass up/down. A cable of dameter d has the mass connected at one end and s wound/unwound
Physics 207 Lecture 6
 Physcs 207 Lecture 6 Agenda: Physcs 207, Lecture 6, Sept. 25 Chapter 4 Frames of reference Chapter 5 ewton s Law Mass Inerta s (contact and non-contact) Frcton (a external force that opposes moton) Free
Physcs 207 Lecture 6 Agenda: Physcs 207, Lecture 6, Sept. 25 Chapter 4 Frames of reference Chapter 5 ewton s Law Mass Inerta s (contact and non-contact) Frcton (a external force that opposes moton) Free
Chapter 8. Rotational Equilibrium and Rotational Dynamics
 Chapter 8 Rotational Equilibrium and Rotational Dynamics Force vs. Torque Forces cause accelerations Torques cause angular accelerations Force and torque are related Torque The door is free to rotate about
Chapter 8 Rotational Equilibrium and Rotational Dynamics Force vs. Torque Forces cause accelerations Torques cause angular accelerations Force and torque are related Torque The door is free to rotate about
SCHOOL OF COMPUTING, ENGINEERING AND MATHEMATICS SEMESTER 2 EXAMINATIONS 2011/2012 DYNAMICS ME247 DR. N.D.D. MICHÉ
 s SCHOOL OF COMPUTING, ENGINEERING ND MTHEMTICS SEMESTER EXMINTIONS 011/01 DYNMICS ME47 DR. N.D.D. MICHÉ Tme allowed: THREE hours nswer: ny FOUR from SIX questons Each queston carres 5 marks Ths s a CLOSED-BOOK
s SCHOOL OF COMPUTING, ENGINEERING ND MTHEMTICS SEMESTER EXMINTIONS 011/01 DYNMICS ME47 DR. N.D.D. MICHÉ Tme allowed: THREE hours nswer: ny FOUR from SIX questons Each queston carres 5 marks Ths s a CLOSED-BOOK
Week 6, Chapter 7 Sect 1-5
 Week 6, Chapter 7 Sect 1-5 Work and Knetc Energy Lecture Quz The frctonal force of the floor on a large sutcase s least when the sutcase s A.pushed by a force parallel to the floor. B.dragged by a force
Week 6, Chapter 7 Sect 1-5 Work and Knetc Energy Lecture Quz The frctonal force of the floor on a large sutcase s least when the sutcase s A.pushed by a force parallel to the floor. B.dragged by a force
PHYS 705: Classical Mechanics. Newtonian Mechanics
 1 PHYS 705: Classcal Mechancs Newtonan Mechancs Quck Revew of Newtonan Mechancs Basc Descrpton: -An dealzed pont partcle or a system of pont partcles n an nertal reference frame [Rgd bodes (ch. 5 later)]
1 PHYS 705: Classcal Mechancs Newtonan Mechancs Quck Revew of Newtonan Mechancs Basc Descrpton: -An dealzed pont partcle or a system of pont partcles n an nertal reference frame [Rgd bodes (ch. 5 later)]
Physics 5153 Classical Mechanics. Principle of Virtual Work-1
 P. Guterrez 1 Introducton Physcs 5153 Classcal Mechancs Prncple of Vrtual Work The frst varatonal prncple we encounter n mechancs s the prncple of vrtual work. It establshes the equlbrum condton of a mechancal
P. Guterrez 1 Introducton Physcs 5153 Classcal Mechancs Prncple of Vrtual Work The frst varatonal prncple we encounter n mechancs s the prncple of vrtual work. It establshes the equlbrum condton of a mechancal
Week 8: Chapter 9. Linear Momentum. Newton Law and Momentum. Linear Momentum, cont. Conservation of Linear Momentum. Conservation of Momentum, 2
 Lnear omentum Week 8: Chapter 9 Lnear omentum and Collsons The lnear momentum of a partcle, or an object that can be modeled as a partcle, of mass m movng wth a velocty v s defned to be the product of
Lnear omentum Week 8: Chapter 9 Lnear omentum and Collsons The lnear momentum of a partcle, or an object that can be modeled as a partcle, of mass m movng wth a velocty v s defned to be the product of
Physics 106 Lecture 6 Conservation of Angular Momentum SJ 7 th Ed.: Chap 11.4
 Physcs 6 ecture 6 Conservaton o Angular Momentum SJ 7 th Ed.: Chap.4 Comparson: dentons o sngle partcle torque and angular momentum Angular momentum o a system o partcles o a rgd body rotatng about a xed
Physcs 6 ecture 6 Conservaton o Angular Momentum SJ 7 th Ed.: Chap.4 Comparson: dentons o sngle partcle torque and angular momentum Angular momentum o a system o partcles o a rgd body rotatng about a xed
Please review the following statement: I certify that I have not given unauthorized aid nor have I received aid in the completion of this exam.
 NME (Last, Frst): Please revew the followng statement: I certfy that I have not gven unauthorzed ad nor have I receved ad n the completon of ths exam. Sgnature: INSTRUCTIONS Begn each problem n the space
NME (Last, Frst): Please revew the followng statement: I certfy that I have not gven unauthorzed ad nor have I receved ad n the completon of ths exam. Sgnature: INSTRUCTIONS Begn each problem n the space
CHAPTER 6. LAGRANGE S EQUATIONS (Analytical Mechanics)
") CHAPTER 6 LAGRANGE S EQUATIONS (Analytcal Mechancs) 1 Ex. 1: Consder a partcle movng on a fxed horzontal surface. r P Let, be the poston and F be the total force on the partcle. The FBD s: -mgk F 1 x O
CHAPTER 6 LAGRANGE S EQUATIONS (Analytcal Mechancs) 1 Ex. 1: Consder a partcle movng on a fxed horzontal surface. r P Let, be the poston and F be the total force on the partcle. The FBD s: -mgk F 1 x O
One Dimensional Axial Deformations
 One Dmensonal al Deformatons In ths secton, a specfc smple geometr s consdered, that of a long and thn straght component loaded n such a wa that t deforms n the aal drecton onl. The -as s taken as the
One Dmensonal al Deformatons In ths secton, a specfc smple geometr s consdered, that of a long and thn straght component loaded n such a wa that t deforms n the aal drecton onl. The -as s taken as the
SCALARS AND VECTORS All physical quantities in engineering mechanics are measured using either scalars or vectors.
 SCALARS AND ECTORS All phscal uanttes n engneerng mechancs are measured usng ether scalars or vectors. Scalar. A scalar s an postve or negatve phscal uantt that can be completel specfed b ts magntude.
SCALARS AND ECTORS All phscal uanttes n engneerng mechancs are measured usng ether scalars or vectors. Scalar. A scalar s an postve or negatve phscal uantt that can be completel specfed b ts magntude.
Linear Momentum. Center of Mass.
 Lecture 6 Chapter 9 Physcs I 03.3.04 Lnear omentum. Center of ass. Course webste: http://faculty.uml.edu/ndry_danylov/teachng/physcsi Lecture Capture: http://echo360.uml.edu/danylov03/physcssprng.html
Lecture 6 Chapter 9 Physcs I 03.3.04 Lnear omentum. Center of ass. Course webste: http://faculty.uml.edu/ndry_danylov/teachng/physcsi Lecture Capture: http://echo360.uml.edu/danylov03/physcssprng.html
Physics 207: Lecture 27. Announcements
 Physcs 07: ecture 7 Announcements ake-up labs are ths week Fnal hwk assgned ths week, fnal quz next week Revew sesson on Thursday ay 9, :30 4:00pm, Here Today s Agenda Statcs recap Beam & Strngs» What
Physcs 07: ecture 7 Announcements ake-up labs are ths week Fnal hwk assgned ths week, fnal quz next week Revew sesson on Thursday ay 9, :30 4:00pm, Here Today s Agenda Statcs recap Beam & Strngs» What
Work is the change in energy of a system (neglecting heat transfer). To examine what could
. To examine what could") Work Work s the change n energy o a system (neglectng heat transer). To eamne what could cause work, let s look at the dmensons o energy: L ML E M L F L so T T dmensonally energy s equal to a orce tmes
Work Work s the change n energy o a system (neglectng heat transer). To eamne what could cause work, let s look at the dmensons o energy: L ML E M L F L so T T dmensonally energy s equal to a orce tmes
Physics 231. Topic 8: Rotational Motion. Alex Brown October MSU Physics 231 Fall
 Physcs 231 Topc 8: Rotatonal Moton Alex Brown October 21-26 2015 MSU Physcs 231 Fall 2015 1 MSU Physcs 231 Fall 2015 2 MSU Physcs 231 Fall 2015 3 Key Concepts: Rotatonal Moton Rotatonal Kneatcs Equatons
Physcs 231 Topc 8: Rotatonal Moton Alex Brown October 21-26 2015 MSU Physcs 231 Fall 2015 1 MSU Physcs 231 Fall 2015 2 MSU Physcs 231 Fall 2015 3 Key Concepts: Rotatonal Moton Rotatonal Kneatcs Equatons
8.1 Arc Length. What is the length of a curve? How can we approximate it? We could do it following the pattern we ve used before
 .1 Arc Length hat s the length of a curve? How can we approxmate t? e could do t followng the pattern we ve used before Use a sequence of ncreasngly short segments to approxmate the curve: As the segments
.1 Arc Length hat s the length of a curve? How can we approxmate t? e could do t followng the pattern we ve used before Use a sequence of ncreasngly short segments to approxmate the curve: As the segments
total If no external forces act, the total linear momentum of the system is conserved. This occurs in collisions and explosions.
 Lesson 0: Collsons, Rotatonal netc Energy, Torque, Center o Graty (Sectons 7.8 Last te we used ewton s second law to deelop the pulse-oentu theore. In words, the theore states that the change n lnear oentu
Lesson 0: Collsons, Rotatonal netc Energy, Torque, Center o Graty (Sectons 7.8 Last te we used ewton s second law to deelop the pulse-oentu theore. In words, the theore states that the change n lnear oentu
Gravitational Acceleration: A case of constant acceleration (approx. 2 hr.) (6/7/11)
 (6/7/11)") Gravtatonal Acceleraton: A case of constant acceleraton (approx. hr.) (6/7/11) Introducton The gravtatonal force s one of the fundamental forces of nature. Under the nfluence of ths force all objects havng
Gravtatonal Acceleraton: A case of constant acceleraton (approx. hr.) (6/7/11) Introducton The gravtatonal force s one of the fundamental forces of nature. Under the nfluence of ths force all objects havng
EN40: Dynamics and Vibrations. Homework 7: Rigid Body Kinematics
 N40: ynamcs and Vbratons Homewor 7: Rgd Body Knematcs School of ngneerng Brown Unversty 1. In the fgure below, bar AB rotates counterclocwse at 4 rad/s. What are the angular veloctes of bars BC and C?.
N40: ynamcs and Vbratons Homewor 7: Rgd Body Knematcs School of ngneerng Brown Unversty 1. In the fgure below, bar AB rotates counterclocwse at 4 rad/s. What are the angular veloctes of bars BC and C?.
Physics 2A Chapters 6 - Work & Energy Fall 2017
 Physcs A Chapters 6 - Work & Energy Fall 017 These notes are eght pages. A quck summary: The work-energy theorem s a combnaton o Chap and Chap 4 equatons. Work s dened as the product o the orce actng on
Physcs A Chapters 6 - Work & Energy Fall 017 These notes are eght pages. A quck summary: The work-energy theorem s a combnaton o Chap and Chap 4 equatons. Work s dened as the product o the orce actng on
12. The Hamilton-Jacobi Equation Michael Fowler
 1. The Hamlton-Jacob Equaton Mchael Fowler Back to Confguraton Space We ve establshed that the acton, regarded as a functon of ts coordnate endponts and tme, satsfes ( ) ( ) S q, t / t+ H qpt,, = 0, and
1. The Hamlton-Jacob Equaton Mchael Fowler Back to Confguraton Space We ve establshed that the acton, regarded as a functon of ts coordnate endponts and tme, satsfes ( ) ( ) S q, t / t+ H qpt,, = 0, and
Application of Forces. Chapter Eight. Torque. Force vs. Torque. Torque, cont. Direction of Torque 4/7/2015
 Raymond A. Serway Chris Vuille Chapter Eight Rotational Equilibrium and Rotational Dynamics Application of Forces The point of application of a force is important This was ignored in treating objects as
Raymond A. Serway Chris Vuille Chapter Eight Rotational Equilibrium and Rotational Dynamics Application of Forces The point of application of a force is important This was ignored in treating objects as
NEWTON S LAWS. These laws only apply when viewed from an inertial coordinate system (unaccelerated system).
.") EWTO S LAWS Consder two partcles. 1 1. If 1 0 then 0 wth p 1 m1v. 1 1 2. 1.. 3. 11 These laws only apply when vewed from an nertal coordnate system (unaccelerated system). consder a collecton of partcles
EWTO S LAWS Consder two partcles. 1 1. If 1 0 then 0 wth p 1 m1v. 1 1 2. 1.. 3. 11 These laws only apply when vewed from an nertal coordnate system (unaccelerated system). consder a collecton of partcles
Chapter 10 Rotational motion
 Prof. Dr. I. Nasser Chapter0_I November 6, 07 Important Terms Chapter 0 Rotatonal moton Angular Dsplacement s, r n radans where s s the length of arc and r s the radus. Angular Velocty The rate at whch
Prof. Dr. I. Nasser Chapter0_I November 6, 07 Important Terms Chapter 0 Rotatonal moton Angular Dsplacement s, r n radans where s s the length of arc and r s the radus. Angular Velocty The rate at whch
PHYSICS 231 Review problems for midterm 2
 PHYSICS 31 Revew problems for mdterm Topc 5: Energy and Work and Power Topc 6: Momentum and Collsons Topc 7: Oscllatons (sprng and pendulum) Topc 8: Rotatonal Moton The nd exam wll be Wednesday October
PHYSICS 31 Revew problems for mdterm Topc 5: Energy and Work and Power Topc 6: Momentum and Collsons Topc 7: Oscllatons (sprng and pendulum) Topc 8: Rotatonal Moton The nd exam wll be Wednesday October
Section 8.3 Polar Form of Complex Numbers
 80 Chapter 8 Secton 8 Polar Form of Complex Numbers From prevous classes, you may have encountered magnary numbers the square roots of negatve numbers and, more generally, complex numbers whch are the
80 Chapter 8 Secton 8 Polar Form of Complex Numbers From prevous classes, you may have encountered magnary numbers the square roots of negatve numbers and, more generally, complex numbers whch are the
PHYS 1443 Section 004 Lecture #12 Thursday, Oct. 2, 2014
 PHYS 1443 Secton 004 Lecture #1 Thursday, Oct., 014 Work-Knetc Energy Theorem Work under rcton Potental Energy and the Conservatve Force Gravtatonal Potental Energy Elastc Potental Energy Conservaton o
PHYS 1443 Secton 004 Lecture #1 Thursday, Oct., 014 Work-Knetc Energy Theorem Work under rcton Potental Energy and the Conservatve Force Gravtatonal Potental Energy Elastc Potental Energy Conservaton o
Mechanics Cycle 3 Chapter 9++ Chapter 9++
 Chapter 9++ More on Knetc Energy and Potental Energy BACK TO THE FUTURE I++ More Predctons wth Energy Conservaton Revst: Knetc energy for rotaton Potental energy M total g y CM for a body n constant gravty
Chapter 9++ More on Knetc Energy and Potental Energy BACK TO THE FUTURE I++ More Predctons wth Energy Conservaton Revst: Knetc energy for rotaton Potental energy M total g y CM for a body n constant gravty
Spin-rotation coupling of the angularly accelerated rigid body
 Spn-rotaton couplng of the angularly accelerated rgd body Loua Hassan Elzen Basher Khartoum, Sudan. Postal code:11123 E-mal: louaelzen@gmal.com November 1, 2017 All Rghts Reserved. Abstract Ths paper s
Spn-rotaton couplng of the angularly accelerated rgd body Loua Hassan Elzen Basher Khartoum, Sudan. Postal code:11123 E-mal: louaelzen@gmal.com November 1, 2017 All Rghts Reserved. Abstract Ths paper s
ˆ (0.10 m) E ( N m /C ) 36 ˆj ( j C m)
 E ( N m /C ) 36 ˆj ( j C m)") 7.. = = 3 = 4 = 5. The electrc feld s constant everywhere between the plates. Ths s ndcated by the electrc feld vectors, whch are all the same length and n the same drecton. 7.5. Model: The dstances to
7.. = = 3 = 4 = 5. The electrc feld s constant everywhere between the plates. Ths s ndcated by the electrc feld vectors, whch are all the same length and n the same drecton. 7.5. Model: The dstances to
Chapter 8. Rotational Equilibrium and Rotational Dynamics
 Chapter 8 Rotational Equilibrium and Rotational Dynamics 1 Force vs. Torque Forces cause accelerations Torques cause angular accelerations Force and torque are related 2 Torque The door is free to rotate
Chapter 8 Rotational Equilibrium and Rotational Dynamics 1 Force vs. Torque Forces cause accelerations Torques cause angular accelerations Force and torque are related 2 Torque The door is free to rotate
Physics 2A Chapter 3 HW Solutions
 Phscs A Chapter 3 HW Solutons Chapter 3 Conceptual Queston: 4, 6, 8, Problems: 5,, 8, 7, 3, 44, 46, 69, 70, 73 Q3.4. Reason: (a) C = A+ B onl A and B are n the same drecton. Sze does not matter. (b) C
Phscs A Chapter 3 HW Solutons Chapter 3 Conceptual Queston: 4, 6, 8, Problems: 5,, 8, 7, 3, 44, 46, 69, 70, 73 Q3.4. Reason: (a) C = A+ B onl A and B are n the same drecton. Sze does not matter. (b) C
Please review the following statement: I certify that I have not given unauthorized aid nor have I received aid in the completion of this exam.
 ME 270 Summer 2014 Fnal Exam NAME (Last, Frst): Please revew the followng statement: I certfy that I have not gven unauthorzed ad nor have I receved ad n the completon of ths exam. Sgnature: INSTRUCTIONS
ME 270 Summer 2014 Fnal Exam NAME (Last, Frst): Please revew the followng statement: I certfy that I have not gven unauthorzed ad nor have I receved ad n the completon of ths exam. Sgnature: INSTRUCTIONS
A particle in a state of uniform motion remain in that state of motion unless acted upon by external force.
 The fundamental prncples of classcal mechancs were lad down by Galleo and Newton n the 16th and 17th centures. In 1686, Newton wrote the Prncpa where he gave us three laws of moton, one law of gravty,
The fundamental prncples of classcal mechancs were lad down by Galleo and Newton n the 16th and 17th centures. In 1686, Newton wrote the Prncpa where he gave us three laws of moton, one law of gravty,
10/24/2013. PHY 113 C General Physics I 11 AM 12:15 PM TR Olin 101. Plan for Lecture 17: Review of Chapters 9-13, 15-16
 0/4/03 PHY 3 C General Physcs I AM :5 PM T Oln 0 Plan or Lecture 7: evew o Chapters 9-3, 5-6. Comment on exam and advce or preparaton. evew 3. Example problems 0/4/03 PHY 3 C Fall 03 -- Lecture 7 0/4/03
0/4/03 PHY 3 C General Physcs I AM :5 PM T Oln 0 Plan or Lecture 7: evew o Chapters 9-3, 5-6. Comment on exam and advce or preparaton. evew 3. Example problems 0/4/03 PHY 3 C Fall 03 -- Lecture 7 0/4/03
Four Bar Linkages in Two Dimensions. A link has fixed length and is joined to other links and also possibly to a fixed point.
 Four bar lnkages 1 Four Bar Lnkages n Two Dmensons lnk has fed length and s oned to other lnks and also possbly to a fed pont. The relatve velocty of end B wth regard to s gven by V B = ω r y v B B = +y
Four bar lnkages 1 Four Bar Lnkages n Two Dmensons lnk has fed length and s oned to other lnks and also possbly to a fed pont. The relatve velocty of end B wth regard to s gven by V B = ω r y v B B = +y
Spring Force and Power
 Lecture 13 Chapter 9 Sprng Force and Power Yeah, energy s better than orces. What s net? Course webste: http://aculty.uml.edu/andry_danylov/teachng/physcsi IN THIS CHAPTER, you wll learn how to solve problems
Lecture 13 Chapter 9 Sprng Force and Power Yeah, energy s better than orces. What s net? Course webste: http://aculty.uml.edu/andry_danylov/teachng/physcsi IN THIS CHAPTER, you wll learn how to solve problems
Physics 5153 Classical Mechanics. D Alembert s Principle and The Lagrangian-1
 P. Guterrez Physcs 5153 Classcal Mechancs D Alembert s Prncple and The Lagrangan 1 Introducton The prncple of vrtual work provdes a method of solvng problems of statc equlbrum wthout havng to consder the
P. Guterrez Physcs 5153 Classcal Mechancs D Alembert s Prncple and The Lagrangan 1 Introducton The prncple of vrtual work provdes a method of solvng problems of statc equlbrum wthout havng to consder the
Physics 207 Lecture 13. Lecture 13
 Physcs 07 Lecture 3 Goals: Lecture 3 Chapter 0 Understand the relatonshp between moton and energy Defne Potental Energy n a Hooke s Law sprng Develop and explot conservaton of energy prncple n problem
Physcs 07 Lecture 3 Goals: Lecture 3 Chapter 0 Understand the relatonshp between moton and energy Defne Potental Energy n a Hooke s Law sprng Develop and explot conservaton of energy prncple n problem
Chapter 20 Rigid Body: Translation and Rotational Motion Kinematics for Fixed Axis Rotation
 Chapter 20 Rgd Body: Translaton and Rotatonal Moton Knematcs for Fxed Axs Rotaton 20.1 Introducton... 1 20.2 Constraned Moton: Translaton and Rotaton... 1 20.2.1 Rollng wthout slppng... 5 Example 20.1
Chapter 20 Rgd Body: Translaton and Rotatonal Moton Knematcs for Fxed Axs Rotaton 20.1 Introducton... 1 20.2 Constraned Moton: Translaton and Rotaton... 1 20.2.1 Rollng wthout slppng... 5 Example 20.1
LAB # 4 - Torque. d (1)
") LAB # 4 - Torque. Introducton Through the use of Newton's three laws of moton, t s possble (n prncple, f not n fact) to predct the moton of any set of partcles. That s, n order to descrbe the moton of
LAB # 4 - Torque. Introducton Through the use of Newton's three laws of moton, t s possble (n prncple, f not n fact) to predct the moton of any set of partcles. That s, n order to descrbe the moton of
Celestial Mechanics. Basic Orbits. Why circles? Tycho Brahe. PHY celestial-mechanics - J. Hedberg
 PHY 454 - celestal-mechancs - J. Hedberg - 207 Celestal Mechancs. Basc Orbts. Why crcles? 2. Tycho Brahe 3. Kepler 4. 3 laws of orbtng bodes 2. Newtonan Mechancs 3. Newton's Laws. Law of Gravtaton 2. The
PHY 454 - celestal-mechancs - J. Hedberg - 207 Celestal Mechancs. Basc Orbts. Why crcles? 2. Tycho Brahe 3. Kepler 4. 3 laws of orbtng bodes 2. Newtonan Mechancs 3. Newton's Laws. Law of Gravtaton 2. The
Chapter 3. r r. Position, Velocity, and Acceleration Revisited
 Chapter 3 Poston, Velocty, and Acceleraton Revsted The poston vector of a partcle s a vector drawn from the orgn to the locaton of the partcle. In two dmensons: r = x ˆ+ yj ˆ (1) The dsplacement vector
Chapter 3 Poston, Velocty, and Acceleraton Revsted The poston vector of a partcle s a vector drawn from the orgn to the locaton of the partcle. In two dmensons: r = x ˆ+ yj ˆ (1) The dsplacement vector
Unit 5: Quadratic Equations & Functions
 Date Perod Unt 5: Quadratc Equatons & Functons DAY TOPIC 1 Modelng Data wth Quadratc Functons Factorng Quadratc Epressons 3 Solvng Quadratc Equatons 4 Comple Numbers Smplfcaton, Addton/Subtracton & Multplcaton
Date Perod Unt 5: Quadratc Equatons & Functons DAY TOPIC 1 Modelng Data wth Quadratc Functons Factorng Quadratc Epressons 3 Solvng Quadratc Equatons 4 Comple Numbers Smplfcaton, Addton/Subtracton & Multplcaton
PY2101 Classical Mechanics Dr. Síle Nic Chormaic, Room 215 D Kane Bldg
 PY2101 Classcal Mechancs Dr. Síle Nc Chormac, Room 215 D Kane Bldg s.ncchormac@ucc.e Lectures stll some ssues to resolve. Slots shared between PY2101 and PY2104. Hope to have t fnalsed by tomorrow. Mondays
PY2101 Classcal Mechancs Dr. Síle Nc Chormac, Room 215 D Kane Bldg s.ncchormac@ucc.e Lectures stll some ssues to resolve. Slots shared between PY2101 and PY2104. Hope to have t fnalsed by tomorrow. Mondays
11. Dynamics in Rotating Frames of Reference
 Unversty of Rhode Island DgtalCommons@URI Classcal Dynamcs Physcs Course Materals 2015 11. Dynamcs n Rotatng Frames of Reference Gerhard Müller Unversty of Rhode Island, gmuller@ur.edu Creatve Commons
Unversty of Rhode Island DgtalCommons@URI Classcal Dynamcs Physcs Course Materals 2015 11. Dynamcs n Rotatng Frames of Reference Gerhard Müller Unversty of Rhode Island, gmuller@ur.edu Creatve Commons
PHYS 1101 Practice problem set 12, Chapter 32: 21, 22, 24, 57, 61, 83 Chapter 33: 7, 12, 32, 38, 44, 49, 76
 PHYS 1101 Practce problem set 1, Chapter 3: 1,, 4, 57, 61, 83 Chapter 33: 7, 1, 3, 38, 44, 49, 76 3.1. Vsualze: Please reer to Fgure Ex3.1. Solve: Because B s n the same drecton as the ntegraton path s
PHYS 1101 Practce problem set 1, Chapter 3: 1,, 4, 57, 61, 83 Chapter 33: 7, 1, 3, 38, 44, 49, 76 3.1. Vsualze: Please reer to Fgure Ex3.1. Solve: Because B s n the same drecton as the ntegraton path s
Modeling of Dynamic Systems
 Modelng of Dynamc Systems Ref: Control System Engneerng Norman Nse : Chapters & 3 Chapter objectves : Revew the Laplace transform Learn how to fnd a mathematcal model, called a transfer functon Learn how
Modelng of Dynamc Systems Ref: Control System Engneerng Norman Nse : Chapters & 3 Chapter objectves : Revew the Laplace transform Learn how to fnd a mathematcal model, called a transfer functon Learn how
1 Matrix representations of canonical matrices
 1 Matrx representatons of canoncal matrces 2-d rotaton around the orgn: ( ) cos θ sn θ R 0 = sn θ cos θ 3-d rotaton around the x-axs: R x = 1 0 0 0 cos θ sn θ 0 sn θ cos θ 3-d rotaton around the y-axs:
1 Matrx representatons of canoncal matrces 2-d rotaton around the orgn: ( ) cos θ sn θ R 0 = sn θ cos θ 3-d rotaton around the x-axs: R x = 1 0 0 0 cos θ sn θ 0 sn θ cos θ 3-d rotaton around the y-axs:
The classical spin-rotation coupling
 LOUAI H. ELZEIN 2018 All Rghts Reserved The classcal spn-rotaton couplng Loua Hassan Elzen Basher Khartoum, Sudan. Postal code:11123 louaelzen@gmal.com Abstract Ths paper s prepared to show that a rgd
LOUAI H. ELZEIN 2018 All Rghts Reserved The classcal spn-rotaton couplng Loua Hassan Elzen Basher Khartoum, Sudan. Postal code:11123 louaelzen@gmal.com Abstract Ths paper s prepared to show that a rgd
Rotational and Translational Comparison. Conservation of Angular Momentum. Angular Momentum for a System of Particles
 Conservaton o Angular Momentum 8.0 WD Rotatonal and Translatonal Comparson Quantty Momentum Ang Momentum Force Torque Knetc Energy Work Power Rotaton L cm = I cm ω = dl / cm cm K = (/ ) rot P rot θ W =
Conservaton o Angular Momentum 8.0 WD Rotatonal and Translatonal Comparson Quantty Momentum Ang Momentum Force Torque Knetc Energy Work Power Rotaton L cm = I cm ω = dl / cm cm K = (/ ) rot P rot θ W =
PES 1120 Spring 2014, Spendier Lecture 6/Page 1
 PES 110 Sprng 014, Spender Lecture 6/Page 1 Lecture today: Chapter 1) Electrc feld due to charge dstrbutons -> charged rod -> charged rng We ntroduced the electrc feld, E. I defned t as an nvsble aura
PES 110 Sprng 014, Spender Lecture 6/Page 1 Lecture today: Chapter 1) Electrc feld due to charge dstrbutons -> charged rod -> charged rng We ntroduced the electrc feld, E. I defned t as an nvsble aura
NMT EE 589 & UNM ME 482/582 ROBOT ENGINEERING. Dr. Stephen Bruder NMT EE 589 & UNM ME 482/582
 NMT EE 589 & UNM ME 48/58 ROBOT ENGINEERING Dr. Stephen Bruder NMT EE 589 & UNM ME 48/58 7. Robot Dynamcs 7.5 The Equatons of Moton Gven that we wsh to fnd the path q(t (n jont space) whch mnmzes the energy
NMT EE 589 & UNM ME 48/58 ROBOT ENGINEERING Dr. Stephen Bruder NMT EE 589 & UNM ME 48/58 7. Robot Dynamcs 7.5 The Equatons of Moton Gven that we wsh to fnd the path q(t (n jont space) whch mnmzes the energy
Angular momentum. Instructor: Dr. Hoi Lam TAM ( 譚海嵐 )
") Angular momentum Instructor: Dr. Ho Lam TAM ( 譚海嵐 ) Physcs Enhancement Programme or Gted Students The Hong Kong Academy or Gted Educaton and Department o Physcs, HKBU Department o Physcs Hong Kong Baptst
Angular momentum Instructor: Dr. Ho Lam TAM ( 譚海嵐 ) Physcs Enhancement Programme or Gted Students The Hong Kong Academy or Gted Educaton and Department o Physcs, HKBU Department o Physcs Hong Kong Baptst
10/23/2003 PHY Lecture 14R 1
 Announcements. Remember -- Tuesday, Oct. 8 th, 9:30 AM Second exam (coverng Chapters 9-4 of HRW) Brng the followng: a) equaton sheet b) Calculator c) Pencl d) Clear head e) Note: If you have kept up wth
Announcements. Remember -- Tuesday, Oct. 8 th, 9:30 AM Second exam (coverng Chapters 9-4 of HRW) Brng the followng: a) equaton sheet b) Calculator c) Pencl d) Clear head e) Note: If you have kept up wth
Period & Frequency. Work and Energy. Methods of Energy Transfer: Energy. Work-KE Theorem 3/4/16. Ranking: Which has the greatest kinetic energy?
 Perod & Frequency Perod (T): Tme to complete one ull rotaton Frequency (): Number o rotatons completed per second. = 1/T, T = 1/ v = πr/t Work and Energy Work: W = F!d (pcks out parallel components) F
Perod & Frequency Perod (T): Tme to complete one ull rotaton Frequency (): Number o rotatons completed per second. = 1/T, T = 1/ v = πr/t Work and Energy Work: W = F!d (pcks out parallel components) F
THE CURRENT BALANCE Physics 258/259
 DSH 1988, 005 THE CURRENT BALANCE Physcs 58/59 The tme average force between two parallel conductors carryng an alternatng current s measured by balancng ths force aganst the gravtatonal force on a set
DSH 1988, 005 THE CURRENT BALANCE Physcs 58/59 The tme average force between two parallel conductors carryng an alternatng current s measured by balancng ths force aganst the gravtatonal force on a set
Electricity and Magnetism - Physics 121 Lecture 10 - Sources of Magnetic Fields (Currents) Y&F Chapter 28, Sec. 1-7
 Y&F Chapter 28, Sec. 1-7") Electrcty and Magnetsm - Physcs 11 Lecture 10 - Sources of Magnetc Felds (Currents) Y&F Chapter 8, Sec. 1-7 Magnetc felds are due to currents The Bot-Savart Law Calculatng feld at the centers of current
Electrcty and Magnetsm - Physcs 11 Lecture 10 - Sources of Magnetc Felds (Currents) Y&F Chapter 8, Sec. 1-7 Magnetc felds are due to currents The Bot-Savart Law Calculatng feld at the centers of current
Chapter 12 Equilibrium & Elasticity
 Chapter 12 Equlbrum & Elastcty If there s a net force, an object wll experence a lnear acceleraton. (perod, end of story!) If there s a net torque, an object wll experence an angular acceleraton. (perod,
Chapter 12 Equlbrum & Elastcty If there s a net force, an object wll experence a lnear acceleraton. (perod, end of story!) If there s a net torque, an object wll experence an angular acceleraton. (perod,
MEASUREMENT OF MOMENT OF INERTIA
 1. measurement MESUREMENT OF MOMENT OF INERTI The am of ths measurement s to determne the moment of nerta of the rotor of an electrc motor. 1. General relatons Rotatng moton and moment of nerta Let us
1. measurement MESUREMENT OF MOMENT OF INERTI The am of ths measurement s to determne the moment of nerta of the rotor of an electrc motor. 1. General relatons Rotatng moton and moment of nerta Let us
1 Hz = one cycle per second
 Rotatonal Moton Mchael Fowler, UVa Physcs, 14E Sprng 009 Mar 5 Prelmnares: Unts for Angular Velocty The tachometer on your car dashboard tells you your car engne s angular speed n rpm, revolutons per mnute,
Rotatonal Moton Mchael Fowler, UVa Physcs, 14E Sprng 009 Mar 5 Prelmnares: Unts for Angular Velocty The tachometer on your car dashboard tells you your car engne s angular speed n rpm, revolutons per mnute,
LAGRANGIAN MECHANICS
 LAGRANGIAN MECHANICS Generalzed Coordnates State of system of N partcles (Newtonan vew): PE, KE, Momentum, L calculated from m, r, ṙ Subscrpt covers: 1) partcles N 2) dmensons 2, 3, etc. PE U r = U x 1,
LAGRANGIAN MECHANICS Generalzed Coordnates State of system of N partcles (Newtonan vew): PE, KE, Momentum, L calculated from m, r, ṙ Subscrpt covers: 1) partcles N 2) dmensons 2, 3, etc. PE U r = U x 1,
χ x B E (c) Figure 2.1.1: (a) a material particle in a body, (b) a place in space, (c) a configuration of the body
 Figure 2.1.1: (a) a material particle in a body, (b) a place in space, (c) a configuration of the body") Secton.. Moton.. The Materal Body and Moton hyscal materals n the real world are modeled usng an abstract mathematcal entty called a body. Ths body conssts of an nfnte number of materal partcles. Shown
Secton.. Moton.. The Materal Body and Moton hyscal materals n the real world are modeled usng an abstract mathematcal entty called a body. Ths body conssts of an nfnte number of materal partcles. Shown
SUMMARY Phys 2113 (General Physics I) Compiled by Prof. Erickson. v = r t. v = lim t 0. p = mv. a = v. a = lim
 Compiled by Prof. Erickson. v = r t. v = lim t 0. p = mv. a = v. a = lim") SUMMARY Phys 2113 (General Physcs I) Compled by Prof. Erckson Poston Vector (m): r = xˆx + yŷ + zẑ Average Velocty (m/s): v = r Instantaneous Velocty (m/s): v = lm 0 r = ṙ Lnear Momentum (kg m/s): p =
SUMMARY Phys 2113 (General Physcs I) Compled by Prof. Erckson Poston Vector (m): r = xˆx + yŷ + zẑ Average Velocty (m/s): v = r Instantaneous Velocty (m/s): v = lm 0 r = ṙ Lnear Momentum (kg m/s): p =
Physics 141. Lecture 14. Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester, Lecture 14, Page 1
 Physcs 141. Lecture 14. Frank L. H. Wolfs Department of Physcs and Astronomy, Unversty of Rochester, Lecture 14, Page 1 Physcs 141. Lecture 14. Course Informaton: Lab report # 3. Exam # 2. Mult-Partcle
Physcs 141. Lecture 14. Frank L. H. Wolfs Department of Physcs and Astronomy, Unversty of Rochester, Lecture 14, Page 1 Physcs 141. Lecture 14. Course Informaton: Lab report # 3. Exam # 2. Mult-Partcle
where v means the change in velocity, and t is the
 1 PHYS:100 LECTURE 4 MECHANICS (3) Ths lecture covers the eneral case of moton wth constant acceleraton and free fall (whch s one of the more mportant examples of moton wth constant acceleraton) n a more
1 PHYS:100 LECTURE 4 MECHANICS (3) Ths lecture covers the eneral case of moton wth constant acceleraton and free fall (whch s one of the more mportant examples of moton wth constant acceleraton) n a more
SYSTEMS OF PARTICLES AND ROTATIONAL MOTION
 CHAPTER SEVEN SYSTES OF PARTICLES AND ROTATIONAL OTION 7.1 Introducton 7.2 Centre of mass 7.3 oton of centre of mass 7.4 Lnear momentum of a system of partcles 7.5 Vector product of two vectors 7.6 Angular
CHAPTER SEVEN SYSTES OF PARTICLES AND ROTATIONAL OTION 7.1 Introducton 7.2 Centre of mass 7.3 oton of centre of mass 7.4 Lnear momentum of a system of partcles 7.5 Vector product of two vectors 7.6 Angular
coordinates. Then, the position vectors are described by
 Revewng, what we have dscussed so far: Generalzed coordnates Any number of varables (say, n) suffcent to specfy the confguraton of the system at each nstant to tme (need not be the mnmum number). In general,
Revewng, what we have dscussed so far: Generalzed coordnates Any number of varables (say, n) suffcent to specfy the confguraton of the system at each nstant to tme (need not be the mnmum number). In general,
SYSTEMS OF PARTICLES AND ROTATIONAL MOTION
 CHAPTER SEVEN SYSTEMS OF PARTICLES AND ROTATIONAL MOTION 7.1 Introducton 7. Centre of mass 7.3 Moton of centre of mass 7.4 Lnear momentum of a system of partcles 7.5 Vector product of two vectors 7.6 Angular
CHAPTER SEVEN SYSTEMS OF PARTICLES AND ROTATIONAL MOTION 7.1 Introducton 7. Centre of mass 7.3 Moton of centre of mass 7.4 Lnear momentum of a system of partcles 7.5 Vector product of two vectors 7.6 Angular
Physics 114 Exam 3 Spring Name:
 Physcs 114 Exam 3 Sprng 015 Name: For gradng purposes (do not wrte here): Queston 1. 1... 3. 3. Problem 4. Answer each of the followng questons. Ponts for each queston are ndcated n red. Unless otherwse
Physcs 114 Exam 3 Sprng 015 Name: For gradng purposes (do not wrte here): Queston 1. 1... 3. 3. Problem 4. Answer each of the followng questons. Ponts for each queston are ndcated n red. Unless otherwse