CHAPTER 10 ROTATIONAL MOTION
|
|
|
- Arleen Hunter
- 5 years ago
- Views:
Transcription
1 CHAPTER 0 ROTATONAL MOTON

2 0. ANGULAR VELOCTY Consder argd body rotates about a fxed axs through pont O n x-y plane as shown. Any partcle at pont P n ths rgd body rotates n a crcle of radus r about O. The angle between r and the postve x-axs s θ. As the pont P oves around the crcle the angle θ changes whle r reans constant. Thus θ serves as a coordnate to descrbe the rotatonal poston of a partcle. The angle s related to the dsplaceent (arc length) s, through the relaton srθ Here the unt of θ s radan wth o 360 rad. π 57.3 o
3 n analogy to the lnear velocty, the average angular velocty of a partcle oves fro pont A to pont B n the fgure s defned as θ ω t f f θ t θ t The nstantaneous angular velocty s defned as θ dθ ω l t t 0 As t s clear fro the above equatons, the unt of ω s rad./s, or sply s -. The drecton of ω s along the axs of rotaton wth ts sense can be deterned fro the rght hand rule: turn the four fngers of your rght hand wth the drecton of rotaton; your thub then gves the drecton of.
4 0. ANGULAR ACCELERATON The average angular acceleraton of a partcle s defned as ω α t f f ω t ω t And the nstantaneous angular acceleraton s defned as ω dω α l The unt of α s rad./s t, or sply s -. t ROTATON WTH CONSTANT a dω α dω α dω α ω ω αt o ω ω t o 0
5 dθ Now ω ω o αt dθ ( ωo αt) θ ( ω ) dθ ( ωo αt) d o αt θ θ ω O O t θ θ α t t o 0 Elnatng t fro the -equatons we get ω ( θ ) O α θ O ω These three equatons are of the sae fors as those for lnear oton wth the replacng: x θ, v ω, and a α
6 Exaple 0. A wheel rotates wth constant angular acceleraton of 3.5 rad/s. f the angular velocty of the wheel s rad/s at t 0. a) What angle does the wheel rotate through n s? b) What s the angular velocty at t s? Soluton Usng the equaton θ θ θ O ω Now Usng the equaton O t α t rad ω ω o αt rad/s ω 3.5 9
7 0.4 RELATONSHPS BETWEEN ANGULAR AND LNEAR VARABLES t s known that v ω s rθ ds dθ r vrω The tangental acceleraton s defned as a θ dv r dω α a θ rα Whle the radal acceleraton s defned as v a r r rω a a t a r r α r ω 4 a r α ω 4
8 Reark: For argd body rotatng about afxed axs, every partcle on the body has the sae angular velocty and the sae angular acceleraton, whle the lnear velocty and the lnear acceleraton dfferfro pont to pont. Exaple 0. A wheel of radus 30 c rotates about a fxed axs wth ntal angular velocty 50 rev/n and takes 0 s to coe to rest. a) Calculate the angular acceleraton. b) How any rotatons does the wheel ake before cong to rest? c) Calculate the radal and tangental acceleratons at t 0. Soluton a) Notng that each revoluton represents π radans we have for the ntal angular velocty ( π ) 50 ω o 5.7 rad/s 60 ω 5π Usng the equaton ω ω o αt α o 0.79 rad/s t 0
9 b) Now usng the equaton θ θ O ω O t α t π θ 5π 0 (0) 50π 4 θ No. of Rev. 5Rev π c) Usng the equatons a a t r r o rα ω 0.3(5π ) 7.5π π 0.3( ) /s 4 /s

10 0.5 ROTATONAL KNETC ENERGY Consder a rgd body conssts of sall partcles, rotates about fxed axs wth angular velocty ω. The knetc energy of the th partcle of ass and lnear speed v s gven by K But K v v r ω r ω The total knetc energy of the rotatng rgd body s the su of the knetc energes of the ndvdual partcles,.e., K K r ω
11 or K ω wth r s called the oent of nerta. t represents the ass n all rotatonal equatons. For a body of contnuous ass dstrbuton, the suaton n Equaton can be replaced by an ntegraton over the body,.e., r d where r s the perpendcular dstance fro the eleent d to the axs of rotaton.
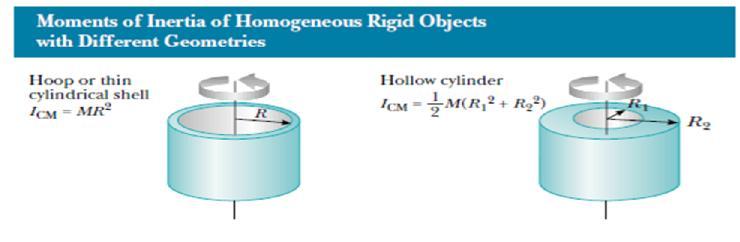
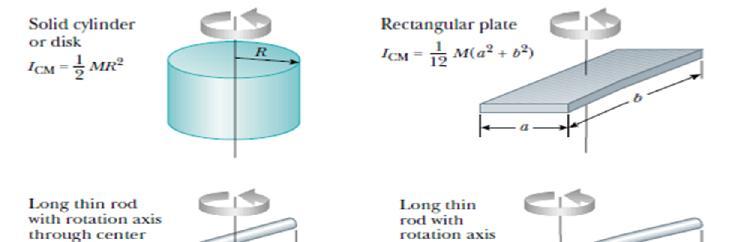
12
13 Exaple 0.3 Calculate the oent of nerta of a unfor, thn rod of ass M and length L about an axs noral to ts length a) at one end, b) at ts center. Soluton a) Let us dvde the rod nto sall eleents each of ass d. Usng the equaton r d x d Usng the defnton of lnear ass densty λ, we have d M λ d λdx dx L L [ ] λ x dx λ λ x L L x ML 3 L d dx
14 b) Now f the axs of rotaton s at the center of the rod we have agan r d x d L d M λ d λdx dx L L [ ] λ x dx λ x λ L ML L 3 3 L 3 L x d dx
15 0.6 TORQUE Consder a force F actng on the partcle P n a rgd body, as shown. The torque due to the force F s defned by the cross product of the vector r and the force vector F, dsplaceent τ r F O y r F θ x The torque s a vector quantty wth agntude τ Fr snθ r F wth r r snθ s called the oent ar of the force and s defned as the perpendcular dstance fro the pont of rotaton to the lne of acton of the force. τ s postve f t tends to rotate the body counterclockwse, n the drecton of ncreasng θ. t s negatve f t tends to rotate the body clockwse. Fro the st equaton, the drecton of t s perpendcular to the plane contanng r and F.
16 Exaple 0.4 A force F 0 N s appled at pont P, 0.5 fro the center O of a wheel. Op akes an angle of 30 wth x-axs and the force akes an angle of 60 wth x-axs, as shown. Calculate the torque on the wheel. O F 0 N P 30 o 60 o Soluton The ar of the force s gven by r r sn sn The torque of the force s then τ r F N. The negatve sgn eans that the rotaton s clockwse.
17 Exaple 0.5 A rod of length L and weght 5 N s acted on by two forces as shown n Fgure 0.8. Fnd the total torque actng on the rod about pont O sn30 N 30 o 0 N 0 cos30 N 40 N 5 N Soluton Let us frst resolve the 0-N force. Takng the ve sense counterclockwse we get τ ( ) ( 5 ) ( 0sn 30) 5 N.
18 0.7 TORQUE AND ANGULAR ACCELERATON Consder a force F actng on a rgd body free to rotate about O. Durng the nfntesal te, the eleent P of ass d wll ove an nfntesal dstance ds along a crcular path of radus r as the body rotates through an nfntesal angle dθ, where dsrdθ The torque actng on the body s τ F t r But F t M( a c ) t and M( ac) at τ ra t d But a t rα t n a d t
19 τ α r d α f there s ore than one force dong torque on the body, the last equaton can be generalzed as τ α The last equaton can be consdered as Newton s second law for rotatonal oton.

20 Exaple 0.6 A wheel of radus R, ass M, and oent of nerta s rotatng on a frctonless, horzontal axle as shown. A lght cord wrapped around the wheel and supports a body of ass. Calculate the lnear acceleraton, a, of the body, the angular acceleraton, α, of the wheel, and the tenson, T, n the cord. Soluton For the wheel we apply τ α TR α () Note that the weght of the wheel and the force of the axle on the wheel don t do any torque on the wheel. Why? And for the ass we apply F a g T a ()
21 The thrd equaton s obtaned fro the relaton between the angular and lnear acceleraton: a Rα (3) Usng Eq. () & Eq.(3) T a R (4) Now addng Eq. () & Eq.(4) g a R Substtutng back n Eq.(4) a g R g T R
22 Exaple 0.7 Two blocks havng asses and are connected to each other by alght cord that passes over afrctonless pulley, wth oent of nerta and radus R, as shown. Fnd the acceleraton of each block and the tensons n the cord. Soluton The free-body dagras of the -asses and the pulley are shown. For the wheel we apply α T T R ( τ ( ) ) And for we apply α F x a T () And for we apply a N g T T g T F y a g T a (3) T
23 The fourth equaton s obtaned fro the relaton between the angular and lnear acceleraton: (4) a Rα Subtractng Eq. () & Eq.() ( ) ) (5 a g T T Substtutng Eq. (5) nto Eq.() ( ) R a R a g α R g a Fro Eq. () we get R g T ( ) R g a g T And fro Eq. (3) we get
24 0.8 WORK AND ROTATONAL MOTON Let us consder agan the stuaton n the fgure shown The work dw done by the force F s F dw ds F snφ ds F snφ ( rdθ ) But ( F snφ) r F r τ dw τ dθ t The total work W s then W θ θ τ dθ dw The power s now gven as P Whch s the rotatonal analogue of dθ τ τω P Fv
25 Now τ α dω P dw τω ω dω dw ωdω ω ( ) W ω dω ω o K ω o ω wth K ω s the rotatonal knetc energy. t s the rotatonal analogue of the lnear equaton K v
26 Exaple 0.8 Consder two asses connected by a strng passng over a pulley havng a oent of nerta about ts axs of rotaton, as shown. The strng does not slp on the pulley, and the syste s released fro rest. Fnd the lnear velocty of the asses after descends through a dstance h, and the angular velocty of the pulley at ths te. Soluton Applyng the conservaton of echancal energy prncple we get K U but K 0 Knowng that 0 and v U U U gh v ωr K f v gh ω
27 0 gh gh v R v v ) ( R gh v ) ( R gh v ( ) R R gh R v ) ( ω

28 0.9 ANGULAR MOMENTUM The angular oentu L of the partcle relatve to an orgn s defned as L r p r v where r s the poston vector of the partcle relatve to O. The angular oentu s a vector quantty wth a drecton perpendcular to the plane fored by r and v, and ts sense s deterned by the rght hand rule dscussed n chapter. The S unt of L s kg. /s Consder a rgd body that rotates about the z-axs through the orgn as shown. The agntude of the angular oentu of the partcle s L v r ωr
29 The total angular oentu of the body s, therefore L L r ω L ω Whch s the rotatonal analogue of the lnear equaton 0.0CONSERVATON OF ANGULAR MOMENTUM t s known that but d t ( p) τ r F dr dp r p r d p ( r ) t and F dl dp dp r τ p dp r Whch s the rotatonal analogue of the lnear equaton F v dp
30 Fro the last equaton, f the external torque actng on a syste s zero, then L s constant,.e., L s conserved, or L L f or ω f ω f Exaple 0.9 Two dsks one of ass kg and radus 0., and the other of ass 4 kg and radus 0.5. The lghter dsk s rotatng wth ntal angular velocty of 80rad/s, whle the heaver dsk rotates wth ntal angular velocty of 40 rad/s. f the two dsks are pushed nto contact, fnd the coon angular velocty of the cobnaton. Soluton The oent of nerta of the two dsks are r ( )(0.) 0.0 kg. r ( 4)(0.5) kg. Now ω ( ) ω ω f ω90.8 rad/s ( 0.0)(80) (0.045)(40) (0.065) ω

31 Exaple 0.0 A turntable rotates n a horzontal plane about a fxed, vertcal axs, akng one revoluton n 5 s. The oent of nerta of the table about the axs of rotaton s 000 kg.. A an of ass 70 kg, ntally standng at the center of the turntable, starts to walk a way fro the center along a radus. What s the angular velocty of the table when the an s fro the center? Soluton Let us call the oent of nerta of the table t and the oent of nerta of the an. The ntal oent of nerta of the syste s, therefore ( t ) ( 000 0) 000 kg.
32 When the an has walked to the poston r, the fnal oent of nerta of the syste becoes f ( ) ( ) 80 kg. r t f Applyng the conservaton of angular oentu law: ω fωf ω f ω f Butω π π 0.4 rad/s T ωf rad/s 80
33 Lnear Moton v dx f a s constant W Rotatonal Moton x θ, v ω, a α,, F τ, p L F a f x v Fdx a dv ω dθ α dω v vo at ω ωo αt vot at f α s constant θ ω ot αt v ax ω ωo αθ o W τ α f τ dθ K v K ω p F Fv v dp τω L τ ω dl
Part C Dynamics and Statics of Rigid Body. Chapter 5 Rotation of a Rigid Body About a Fixed Axis
 Part C Dynamcs and Statcs of Rgd Body Chapter 5 Rotaton of a Rgd Body About a Fxed Axs 5.. Rotatonal Varables 5.. Rotaton wth Constant Angular Acceleraton 5.3. Knetc Energy of Rotaton, Rotatonal Inerta
Part C Dynamcs and Statcs of Rgd Body Chapter 5 Rotaton of a Rgd Body About a Fxed Axs 5.. Rotatonal Varables 5.. Rotaton wth Constant Angular Acceleraton 5.3. Knetc Energy of Rotaton, Rotatonal Inerta
Spring 2002 Lecture #13
 44-50 Sprng 00 ecture # Dr. Jaehoon Yu. Rotatonal Energy. Computaton of oments of nerta. Parallel-as Theorem 4. Torque & Angular Acceleraton 5. Work, Power, & Energy of Rotatonal otons Remember the md-term
44-50 Sprng 00 ecture # Dr. Jaehoon Yu. Rotatonal Energy. Computaton of oments of nerta. Parallel-as Theorem 4. Torque & Angular Acceleraton 5. Work, Power, & Energy of Rotatonal otons Remember the md-term
Chapter 11 Angular Momentum
 Chapter 11 Angular Momentum Analyss Model: Nonsolated System (Angular Momentum) Angular Momentum of a Rotatng Rgd Object Analyss Model: Isolated System (Angular Momentum) Angular Momentum of a Partcle
Chapter 11 Angular Momentum Analyss Model: Nonsolated System (Angular Momentum) Angular Momentum of a Rotatng Rgd Object Analyss Model: Isolated System (Angular Momentum) Angular Momentum of a Partcle
Physics 111: Mechanics Lecture 11
 Physcs 111: Mechancs Lecture 11 Bn Chen NJIT Physcs Department Textbook Chapter 10: Dynamcs of Rotatonal Moton q 10.1 Torque q 10. Torque and Angular Acceleraton for a Rgd Body q 10.3 Rgd-Body Rotaton
Physcs 111: Mechancs Lecture 11 Bn Chen NJIT Physcs Department Textbook Chapter 10: Dynamcs of Rotatonal Moton q 10.1 Torque q 10. Torque and Angular Acceleraton for a Rgd Body q 10.3 Rgd-Body Rotaton
total If no external forces act, the total linear momentum of the system is conserved. This occurs in collisions and explosions.
 Lesson 0: Collsons, Rotatonal netc Energy, Torque, Center o Graty (Sectons 7.8 Last te we used ewton s second law to deelop the pulse-oentu theore. In words, the theore states that the change n lnear oentu
Lesson 0: Collsons, Rotatonal netc Energy, Torque, Center o Graty (Sectons 7.8 Last te we used ewton s second law to deelop the pulse-oentu theore. In words, the theore states that the change n lnear oentu
Week 9 Chapter 10 Section 1-5
 Week 9 Chapter 10 Secton 1-5 Rotaton Rgd Object A rgd object s one that s nondeformable The relatve locatons of all partcles makng up the object reman constant All real objects are deformable to some extent,
Week 9 Chapter 10 Secton 1-5 Rotaton Rgd Object A rgd object s one that s nondeformable The relatve locatons of all partcles makng up the object reman constant All real objects are deformable to some extent,
Rotational Dynamics. Physics 1425 Lecture 19. Michael Fowler, UVa
 Rotatonal Dynamcs Physcs 1425 Lecture 19 Mchael Fowler, UVa Rotatonal Dynamcs Newton s Frst Law: a rotatng body wll contnue to rotate at constant angular velocty as long as there s no torque actng on t.
Rotatonal Dynamcs Physcs 1425 Lecture 19 Mchael Fowler, UVa Rotatonal Dynamcs Newton s Frst Law: a rotatng body wll contnue to rotate at constant angular velocty as long as there s no torque actng on t.
Important Dates: Post Test: Dec during recitations. If you have taken the post test, don t come to recitation!
 Important Dates: Post Test: Dec. 8 0 durng rectatons. If you have taken the post test, don t come to rectaton! Post Test Make-Up Sessons n ARC 03: Sat Dec. 6, 0 AM noon, and Sun Dec. 7, 8 PM 0 PM. Post
Important Dates: Post Test: Dec. 8 0 durng rectatons. If you have taken the post test, don t come to rectaton! Post Test Make-Up Sessons n ARC 03: Sat Dec. 6, 0 AM noon, and Sun Dec. 7, 8 PM 0 PM. Post
Angular Momentum and Fixed Axis Rotation. 8.01t Nov 10, 2004
 Angular Momentum and Fxed Axs Rotaton 8.01t Nov 10, 2004 Dynamcs: Translatonal and Rotatonal Moton Translatonal Dynamcs Total Force Torque Angular Momentum about Dynamcs of Rotaton F ext Momentum of a
Angular Momentum and Fxed Axs Rotaton 8.01t Nov 10, 2004 Dynamcs: Translatonal and Rotatonal Moton Translatonal Dynamcs Total Force Torque Angular Momentum about Dynamcs of Rotaton F ext Momentum of a
PHYS 1443 Section 003 Lecture #17
 PHYS 144 Secton 00 ecture #17 Wednesda, Oct. 9, 00 1. Rollng oton of a Rgd od. Torque. oment of Inerta 4. Rotatonal Knetc Energ 5. Torque and Vector Products Remember the nd term eam (ch 6 11), onda, Nov.!
PHYS 144 Secton 00 ecture #17 Wednesda, Oct. 9, 00 1. Rollng oton of a Rgd od. Torque. oment of Inerta 4. Rotatonal Knetc Energ 5. Torque and Vector Products Remember the nd term eam (ch 6 11), onda, Nov.!
Chapter 11 Torque and Angular Momentum
 Chapter Torque and Angular Momentum I. Torque II. Angular momentum - Defnton III. Newton s second law n angular form IV. Angular momentum - System of partcles - Rgd body - Conservaton I. Torque - Vector
Chapter Torque and Angular Momentum I. Torque II. Angular momentum - Defnton III. Newton s second law n angular form IV. Angular momentum - System of partcles - Rgd body - Conservaton I. Torque - Vector
Physics 231. Topic 8: Rotational Motion. Alex Brown October MSU Physics 231 Fall
 Physcs 231 Topc 8: Rotatonal Moton Alex Brown October 21-26 2015 MSU Physcs 231 Fall 2015 1 MSU Physcs 231 Fall 2015 2 MSU Physcs 231 Fall 2015 3 Key Concepts: Rotatonal Moton Rotatonal Kneatcs Equatons
Physcs 231 Topc 8: Rotatonal Moton Alex Brown October 21-26 2015 MSU Physcs 231 Fall 2015 1 MSU Physcs 231 Fall 2015 2 MSU Physcs 231 Fall 2015 3 Key Concepts: Rotatonal Moton Rotatonal Kneatcs Equatons
So far: simple (planar) geometries
 geometries") Physcs 06 ecture 5 Torque and Angular Momentum as Vectors SJ 7thEd.: Chap. to 3 Rotatonal quanttes as vectors Cross product Torque epressed as a vector Angular momentum defned Angular momentum as a vector
Physcs 06 ecture 5 Torque and Angular Momentum as Vectors SJ 7thEd.: Chap. to 3 Rotatonal quanttes as vectors Cross product Torque epressed as a vector Angular momentum defned Angular momentum as a vector
10/9/2003 PHY Lecture 11 1
 Announcements 1. Physc Colloquum today --The Physcs and Analyss of Non-nvasve Optcal Imagng. Today s lecture Bref revew of momentum & collsons Example HW problems Introducton to rotatons Defnton of angular
Announcements 1. Physc Colloquum today --The Physcs and Analyss of Non-nvasve Optcal Imagng. Today s lecture Bref revew of momentum & collsons Example HW problems Introducton to rotatons Defnton of angular
Study Guide For Exam Two
 Study Gude For Exam Two Physcs 2210 Albretsen Updated: 08/02/2018 All Other Prevous Study Gudes Modules 01-06 Module 07 Work Work done by a constant force F over a dstance s : Work done by varyng force
Study Gude For Exam Two Physcs 2210 Albretsen Updated: 08/02/2018 All Other Prevous Study Gudes Modules 01-06 Module 07 Work Work done by a constant force F over a dstance s : Work done by varyng force
Linear Momentum. Center of Mass.
 Lecture 16 Chapter 9 Physcs I 11.06.2013 Lnear oentu. Center of ass. Course webste: http://faculty.ul.edu/ndry_danylov/teachng/physcsi Lecture Capture: http://echo360.ul.edu/danylov2013/physcs1fall.htl
Lecture 16 Chapter 9 Physcs I 11.06.2013 Lnear oentu. Center of ass. Course webste: http://faculty.ul.edu/ndry_danylov/teachng/physcsi Lecture Capture: http://echo360.ul.edu/danylov2013/physcs1fall.htl
Chapter 10 Rotational motion
 Prof. Dr. I. Nasser Chapter0_I November 6, 07 Important Terms Chapter 0 Rotatonal moton Angular Dsplacement s, r n radans where s s the length of arc and r s the radus. Angular Velocty The rate at whch
Prof. Dr. I. Nasser Chapter0_I November 6, 07 Important Terms Chapter 0 Rotatonal moton Angular Dsplacement s, r n radans where s s the length of arc and r s the radus. Angular Velocty The rate at whch
Spin-rotation coupling of the angularly accelerated rigid body
 Spn-rotaton couplng of the angularly accelerated rgd body Loua Hassan Elzen Basher Khartoum, Sudan. Postal code:11123 E-mal: louaelzen@gmal.com November 1, 2017 All Rghts Reserved. Abstract Ths paper s
Spn-rotaton couplng of the angularly accelerated rgd body Loua Hassan Elzen Basher Khartoum, Sudan. Postal code:11123 E-mal: louaelzen@gmal.com November 1, 2017 All Rghts Reserved. Abstract Ths paper s
Physics 231. Topic 8: Rotational Motion. Alex Brown October MSU Physics 231 Fall
 Physcs 231 Topc 8: Rotatonal Moton Alex Brown October 21-26 2015 MSU Physcs 231 Fall 2015 1 MSU Physcs 231 Fall 2015 2 MSU Physcs 231 Fall 2015 3 Key Concepts: Rotatonal Moton Rotatonal Kneatcs Equatons
Physcs 231 Topc 8: Rotatonal Moton Alex Brown October 21-26 2015 MSU Physcs 231 Fall 2015 1 MSU Physcs 231 Fall 2015 2 MSU Physcs 231 Fall 2015 3 Key Concepts: Rotatonal Moton Rotatonal Kneatcs Equatons
Week 11: Chapter 11. The Vector Product. The Vector Product Defined. The Vector Product and Torque. More About the Vector Product
 The Vector Product Week 11: Chapter 11 Angular Momentum There are nstances where the product of two vectors s another vector Earler we saw where the product of two vectors was a scalar Ths was called the
The Vector Product Week 11: Chapter 11 Angular Momentum There are nstances where the product of two vectors s another vector Earler we saw where the product of two vectors was a scalar Ths was called the
Physics 207: Lecture 27. Announcements
 Physcs 07: ecture 7 Announcements ake-up labs are ths week Fnal hwk assgned ths week, fnal quz next week Revew sesson on Thursday ay 9, :30 4:00pm, Here Today s Agenda Statcs recap Beam & Strngs» What
Physcs 07: ecture 7 Announcements ake-up labs are ths week Fnal hwk assgned ths week, fnal quz next week Revew sesson on Thursday ay 9, :30 4:00pm, Here Today s Agenda Statcs recap Beam & Strngs» What
Dynamics of Rotational Motion
 Dynamcs of Rotatonal Moton Torque: the rotatonal analogue of force Torque = force x moment arm = Fl moment arm = perpendcular dstance through whch the force acts a.k.a. leer arm l F l F l F l F = Fl =
Dynamcs of Rotatonal Moton Torque: the rotatonal analogue of force Torque = force x moment arm = Fl moment arm = perpendcular dstance through whch the force acts a.k.a. leer arm l F l F l F l F = Fl =
Physics 181. Particle Systems
 Physcs 181 Partcle Systems Overvew In these notes we dscuss the varables approprate to the descrpton of systems of partcles, ther defntons, ther relatons, and ther conservatons laws. We consder a system
Physcs 181 Partcle Systems Overvew In these notes we dscuss the varables approprate to the descrpton of systems of partcles, ther defntons, ther relatons, and ther conservatons laws. We consder a system
10/23/2003 PHY Lecture 14R 1
 Announcements. Remember -- Tuesday, Oct. 8 th, 9:30 AM Second exam (coverng Chapters 9-4 of HRW) Brng the followng: a) equaton sheet b) Calculator c) Pencl d) Clear head e) Note: If you have kept up wth
Announcements. Remember -- Tuesday, Oct. 8 th, 9:30 AM Second exam (coverng Chapters 9-4 of HRW) Brng the followng: a) equaton sheet b) Calculator c) Pencl d) Clear head e) Note: If you have kept up wth
τ rf = Iα I point = mr 2 L35 F 11/14/14 a*er lecture 1
 A mass s attached to a long, massless rod. The mass s close to one end of the rod. Is t easer to balance the rod on end wth the mass near the top or near the bottom? Hnt: Small α means sluggsh behavor
A mass s attached to a long, massless rod. The mass s close to one end of the rod. Is t easer to balance the rod on end wth the mass near the top or near the bottom? Hnt: Small α means sluggsh behavor
Physics 53. Rotational Motion 3. Sir, I have found you an argument, but I am not obliged to find you an understanding.
 Physcs 53 Rotatonal Moton 3 Sr, I have found you an argument, but I am not oblged to fnd you an understandng. Samuel Johnson Angular momentum Wth respect to rotatonal moton of a body, moment of nerta plays
Physcs 53 Rotatonal Moton 3 Sr, I have found you an argument, but I am not oblged to fnd you an understandng. Samuel Johnson Angular momentum Wth respect to rotatonal moton of a body, moment of nerta plays
Page 1. SPH4U: Lecture 7. New Topic: Friction. Today s Agenda. Surface Friction... Surface Friction...
 SPH4U: Lecture 7 Today s Agenda rcton What s t? Systeatc catagores of forces How do we characterze t? Model of frcton Statc & Knetc frcton (knetc = dynac n soe languages) Soe probles nvolvng frcton ew
SPH4U: Lecture 7 Today s Agenda rcton What s t? Systeatc catagores of forces How do we characterze t? Model of frcton Statc & Knetc frcton (knetc = dynac n soe languages) Soe probles nvolvng frcton ew
Week3, Chapter 4. Position and Displacement. Motion in Two Dimensions. Instantaneous Velocity. Average Velocity
 Week3, Chapter 4 Moton n Two Dmensons Lecture Quz A partcle confned to moton along the x axs moves wth constant acceleraton from x =.0 m to x = 8.0 m durng a 1-s tme nterval. The velocty of the partcle
Week3, Chapter 4 Moton n Two Dmensons Lecture Quz A partcle confned to moton along the x axs moves wth constant acceleraton from x =.0 m to x = 8.0 m durng a 1-s tme nterval. The velocty of the partcle
Chapter 11: Angular Momentum
 Chapter 11: ngular Momentum Statc Equlbrum In Chap. 4 we studed the equlbrum of pontobjects (mass m) wth the applcaton of Newton s aws F 0 F x y, 0 Therefore, no lnear (translatonal) acceleraton, a0 For
Chapter 11: ngular Momentum Statc Equlbrum In Chap. 4 we studed the equlbrum of pontobjects (mass m) wth the applcaton of Newton s aws F 0 F x y, 0 Therefore, no lnear (translatonal) acceleraton, a0 For
Physics 207: Lecture 20. Today s Agenda Homework for Monday
 Physcs 207: Lecture 20 Today s Agenda Homework for Monday Recap: Systems of Partcles Center of mass Velocty and acceleraton of the center of mass Dynamcs of the center of mass Lnear Momentum Example problems
Physcs 207: Lecture 20 Today s Agenda Homework for Monday Recap: Systems of Partcles Center of mass Velocty and acceleraton of the center of mass Dynamcs of the center of mass Lnear Momentum Example problems
ˆ (0.10 m) E ( N m /C ) 36 ˆj ( j C m)
 E ( N m /C ) 36 ˆj ( j C m)") 7.. = = 3 = 4 = 5. The electrc feld s constant everywhere between the plates. Ths s ndcated by the electrc feld vectors, whch are all the same length and n the same drecton. 7.5. Model: The dstances to
7.. = = 3 = 4 = 5. The electrc feld s constant everywhere between the plates. Ths s ndcated by the electrc feld vectors, whch are all the same length and n the same drecton. 7.5. Model: The dstances to
Moments of Inertia. and reminds us of the analogous equation for linear momentum p= mv, which is of the form. The kinetic energy of the body is.
 Moments of Inerta Suppose a body s movng on a crcular path wth constant speed Let s consder two quanttes: the body s angular momentum L about the center of the crcle, and ts knetc energy T How are these
Moments of Inerta Suppose a body s movng on a crcular path wth constant speed Let s consder two quanttes: the body s angular momentum L about the center of the crcle, and ts knetc energy T How are these
Linear Momentum. Center of Mass.
 Lecture 6 Chapter 9 Physcs I 03.3.04 Lnear omentum. Center of ass. Course webste: http://faculty.uml.edu/ndry_danylov/teachng/physcsi Lecture Capture: http://echo360.uml.edu/danylov03/physcssprng.html
Lecture 6 Chapter 9 Physcs I 03.3.04 Lnear omentum. Center of ass. Course webste: http://faculty.uml.edu/ndry_danylov/teachng/physcsi Lecture Capture: http://echo360.uml.edu/danylov03/physcssprng.html
Physics 3A: Linear Momentum. Physics 3A: Linear Momentum. Physics 3A: Linear Momentum. Physics 3A: Linear Momentum
 Recall that there was ore to oton than just spee A ore coplete escrpton of oton s the concept of lnear oentu: p v (8.) Beng a prouct of a scalar () an a vector (v), oentu s a vector: p v p y v y p z v
Recall that there was ore to oton than just spee A ore coplete escrpton of oton s the concept of lnear oentu: p v (8.) Beng a prouct of a scalar () an a vector (v), oentu s a vector: p v p y v y p z v
First Law: A body at rest remains at rest, a body in motion continues to move at constant velocity, unless acted upon by an external force.
 Secton 1. Dynamcs (Newton s Laws of Moton) Two approaches: 1) Gven all the forces actng on a body, predct the subsequent (changes n) moton. 2) Gven the (changes n) moton of a body, nfer what forces act
Secton 1. Dynamcs (Newton s Laws of Moton) Two approaches: 1) Gven all the forces actng on a body, predct the subsequent (changes n) moton. 2) Gven the (changes n) moton of a body, nfer what forces act
Chapter 3. r r. Position, Velocity, and Acceleration Revisited
 Chapter 3 Poston, Velocty, and Acceleraton Revsted The poston vector of a partcle s a vector drawn from the orgn to the locaton of the partcle. In two dmensons: r = x ˆ+ yj ˆ (1) The dsplacement vector
Chapter 3 Poston, Velocty, and Acceleraton Revsted The poston vector of a partcle s a vector drawn from the orgn to the locaton of the partcle. In two dmensons: r = x ˆ+ yj ˆ (1) The dsplacement vector
Conservation of Angular Momentum = "Spin"
 Page 1 of 6 Conservaton of Angular Momentum = "Spn" We can assgn a drecton to the angular velocty: drecton of = drecton of axs + rght hand rule (wth rght hand, curl fngers n drecton of rotaton, thumb ponts
Page 1 of 6 Conservaton of Angular Momentum = "Spn" We can assgn a drecton to the angular velocty: drecton of = drecton of axs + rght hand rule (wth rght hand, curl fngers n drecton of rotaton, thumb ponts
PHYS 1443 Section 002 Lecture #20
 PHYS 1443 Secton 002 Lecture #20 Dr. Jae Condtons for Equlbru & Mechancal Equlbru How to Solve Equlbru Probles? A ew Exaples of Mechancal Equlbru Elastc Propertes of Solds Densty and Specfc Gravty lud
PHYS 1443 Secton 002 Lecture #20 Dr. Jae Condtons for Equlbru & Mechancal Equlbru How to Solve Equlbru Probles? A ew Exaples of Mechancal Equlbru Elastc Propertes of Solds Densty and Specfc Gravty lud
Physics 5153 Classical Mechanics. Principle of Virtual Work-1
 P. Guterrez 1 Introducton Physcs 5153 Classcal Mechancs Prncple of Vrtual Work The frst varatonal prncple we encounter n mechancs s the prncple of vrtual work. It establshes the equlbrum condton of a mechancal
P. Guterrez 1 Introducton Physcs 5153 Classcal Mechancs Prncple of Vrtual Work The frst varatonal prncple we encounter n mechancs s the prncple of vrtual work. It establshes the equlbrum condton of a mechancal
ENGN 40 Dynamics and Vibrations Homework # 7 Due: Friday, April 15
 NGN 40 ynamcs and Vbratons Homework # 7 ue: Frday, Aprl 15 1. Consder a concal hostng drum used n the mnng ndustry to host a mass up/down. A cable of dameter d has the mass connected at one end and s wound/unwound
NGN 40 ynamcs and Vbratons Homework # 7 ue: Frday, Aprl 15 1. Consder a concal hostng drum used n the mnng ndustry to host a mass up/down. A cable of dameter d has the mass connected at one end and s wound/unwound
MEASUREMENT OF MOMENT OF INERTIA
 1. measurement MESUREMENT OF MOMENT OF INERTI The am of ths measurement s to determne the moment of nerta of the rotor of an electrc motor. 1. General relatons Rotatng moton and moment of nerta Let us
1. measurement MESUREMENT OF MOMENT OF INERTI The am of ths measurement s to determne the moment of nerta of the rotor of an electrc motor. 1. General relatons Rotatng moton and moment of nerta Let us
The classical spin-rotation coupling
 LOUAI H. ELZEIN 2018 All Rghts Reserved The classcal spn-rotaton couplng Loua Hassan Elzen Basher Khartoum, Sudan. Postal code:11123 louaelzen@gmal.com Abstract Ths paper s prepared to show that a rgd
LOUAI H. ELZEIN 2018 All Rghts Reserved The classcal spn-rotaton couplng Loua Hassan Elzen Basher Khartoum, Sudan. Postal code:11123 louaelzen@gmal.com Abstract Ths paper s prepared to show that a rgd
Chapter 20 Rigid Body: Translation and Rotational Motion Kinematics for Fixed Axis Rotation
 Chapter 20 Rgd Body: Translaton and Rotatonal Moton Knematcs for Fxed Axs Rotaton 20.1 Introducton... 1 20.2 Constraned Moton: Translaton and Rotaton... 1 20.2.1 Rollng wthout slppng... 5 Example 20.1
Chapter 20 Rgd Body: Translaton and Rotatonal Moton Knematcs for Fxed Axs Rotaton 20.1 Introducton... 1 20.2 Constraned Moton: Translaton and Rotaton... 1 20.2.1 Rollng wthout slppng... 5 Example 20.1
Elastic Collisions. Definition: two point masses on which no external forces act collide without losing any energy.
 Elastc Collsons Defnton: to pont asses on hch no external forces act collde thout losng any energy v Prerequstes: θ θ collsons n one denson conservaton of oentu and energy occurs frequently n everyday
Elastc Collsons Defnton: to pont asses on hch no external forces act collde thout losng any energy v Prerequstes: θ θ collsons n one denson conservaton of oentu and energy occurs frequently n everyday
Rotational and Translational Comparison. Conservation of Angular Momentum. Angular Momentum for a System of Particles
 Conservaton o Angular Momentum 8.0 WD Rotatonal and Translatonal Comparson Quantty Momentum Ang Momentum Force Torque Knetc Energy Work Power Rotaton L cm = I cm ω = dl / cm cm K = (/ ) rot P rot θ W =
Conservaton o Angular Momentum 8.0 WD Rotatonal and Translatonal Comparson Quantty Momentum Ang Momentum Force Torque Knetc Energy Work Power Rotaton L cm = I cm ω = dl / cm cm K = (/ ) rot P rot θ W =
Mechanics Cycle 3 Chapter 9++ Chapter 9++
 Chapter 9++ More on Knetc Energy and Potental Energy BACK TO THE FUTURE I++ More Predctons wth Energy Conservaton Revst: Knetc energy for rotaton Potental energy M total g y CM for a body n constant gravty
Chapter 9++ More on Knetc Energy and Potental Energy BACK TO THE FUTURE I++ More Predctons wth Energy Conservaton Revst: Knetc energy for rotaton Potental energy M total g y CM for a body n constant gravty
SCHOOL OF COMPUTING, ENGINEERING AND MATHEMATICS SEMESTER 2 EXAMINATIONS 2011/2012 DYNAMICS ME247 DR. N.D.D. MICHÉ
 s SCHOOL OF COMPUTING, ENGINEERING ND MTHEMTICS SEMESTER EXMINTIONS 011/01 DYNMICS ME47 DR. N.D.D. MICHÉ Tme allowed: THREE hours nswer: ny FOUR from SIX questons Each queston carres 5 marks Ths s a CLOSED-BOOK
s SCHOOL OF COMPUTING, ENGINEERING ND MTHEMTICS SEMESTER EXMINTIONS 011/01 DYNMICS ME47 DR. N.D.D. MICHÉ Tme allowed: THREE hours nswer: ny FOUR from SIX questons Each queston carres 5 marks Ths s a CLOSED-BOOK
Physics 201 Lecture 9
 Physcs 20 Lecture 9 l Goals: Lecture 8 ewton s Laws v Solve D & 2D probles ntroducng forces wth/wthout frcton v Utlze ewton s st & 2 nd Laws v Begn to use ewton s 3 rd Law n proble solvng Law : An obect
Physcs 20 Lecture 9 l Goals: Lecture 8 ewton s Laws v Solve D & 2D probles ntroducng forces wth/wthout frcton v Utlze ewton s st & 2 nd Laws v Begn to use ewton s 3 rd Law n proble solvng Law : An obect
coordinates. Then, the position vectors are described by
 Revewng, what we have dscussed so far: Generalzed coordnates Any number of varables (say, n) suffcent to specfy the confguraton of the system at each nstant to tme (need not be the mnmum number). In general,
Revewng, what we have dscussed so far: Generalzed coordnates Any number of varables (say, n) suffcent to specfy the confguraton of the system at each nstant to tme (need not be the mnmum number). In general,
Modeling of Dynamic Systems
 Modelng of Dynamc Systems Ref: Control System Engneerng Norman Nse : Chapters & 3 Chapter objectves : Revew the Laplace transform Learn how to fnd a mathematcal model, called a transfer functon Learn how
Modelng of Dynamc Systems Ref: Control System Engneerng Norman Nse : Chapters & 3 Chapter objectves : Revew the Laplace transform Learn how to fnd a mathematcal model, called a transfer functon Learn how
10/24/2013. PHY 113 C General Physics I 11 AM 12:15 PM TR Olin 101. Plan for Lecture 17: Review of Chapters 9-13, 15-16
 0/4/03 PHY 3 C General Physcs I AM :5 PM T Oln 0 Plan or Lecture 7: evew o Chapters 9-3, 5-6. Comment on exam and advce or preparaton. evew 3. Example problems 0/4/03 PHY 3 C Fall 03 -- Lecture 7 0/4/03
0/4/03 PHY 3 C General Physcs I AM :5 PM T Oln 0 Plan or Lecture 7: evew o Chapters 9-3, 5-6. Comment on exam and advce or preparaton. evew 3. Example problems 0/4/03 PHY 3 C Fall 03 -- Lecture 7 0/4/03
Physics 106 Lecture 6 Conservation of Angular Momentum SJ 7 th Ed.: Chap 11.4
 Physcs 6 ecture 6 Conservaton o Angular Momentum SJ 7 th Ed.: Chap.4 Comparson: dentons o sngle partcle torque and angular momentum Angular momentum o a system o partcles o a rgd body rotatng about a xed
Physcs 6 ecture 6 Conservaton o Angular Momentum SJ 7 th Ed.: Chap.4 Comparson: dentons o sngle partcle torque and angular momentum Angular momentum o a system o partcles o a rgd body rotatng about a xed
PHYS 1441 Section 001 Lecture #15 Wednesday, July 8, 2015
 PHYS 1441 Secton 001 Lecture #15 Wednesday, July 8, 2015 Concept of the Center of Mass Center of Mass & Center of Gravty Fundamentals of the Rotatonal Moton Rotatonal Knematcs Equatons of Rotatonal Knematcs
PHYS 1441 Secton 001 Lecture #15 Wednesday, July 8, 2015 Concept of the Center of Mass Center of Mass & Center of Gravty Fundamentals of the Rotatonal Moton Rotatonal Knematcs Equatons of Rotatonal Knematcs
A Tale of Friction Basic Rollercoaster Physics. Fahrenheit Rollercoaster, Hershey, PA max height = 121 ft max speed = 58 mph
 A Tale o Frcton Basc Rollercoaster Physcs Fahrenhet Rollercoaster, Hershey, PA max heght = 11 t max speed = 58 mph PLAY PLAY PLAY PLAY Rotatonal Movement Knematcs Smlar to how lnear velocty s dened, angular
A Tale o Frcton Basc Rollercoaster Physcs Fahrenhet Rollercoaster, Hershey, PA max heght = 11 t max speed = 58 mph PLAY PLAY PLAY PLAY Rotatonal Movement Knematcs Smlar to how lnear velocty s dened, angular
PHYS 705: Classical Mechanics. Newtonian Mechanics
 1 PHYS 705: Classcal Mechancs Newtonan Mechancs Quck Revew of Newtonan Mechancs Basc Descrpton: -An dealzed pont partcle or a system of pont partcles n an nertal reference frame [Rgd bodes (ch. 5 later)]
1 PHYS 705: Classcal Mechancs Newtonan Mechancs Quck Revew of Newtonan Mechancs Basc Descrpton: -An dealzed pont partcle or a system of pont partcles n an nertal reference frame [Rgd bodes (ch. 5 later)]
EN40: Dynamics and Vibrations. Homework 7: Rigid Body Kinematics
 N40: ynamcs and Vbratons Homewor 7: Rgd Body Knematcs School of ngneerng Brown Unversty 1. In the fgure below, bar AB rotates counterclocwse at 4 rad/s. What are the angular veloctes of bars BC and C?.
N40: ynamcs and Vbratons Homewor 7: Rgd Body Knematcs School of ngneerng Brown Unversty 1. In the fgure below, bar AB rotates counterclocwse at 4 rad/s. What are the angular veloctes of bars BC and C?.
Chapter 3 and Chapter 4
 Chapter 3 and Chapter 4 Chapter 3 Energy 3. Introducton:Work Work W s energy transerred to or rom an object by means o a orce actng on the object. Energy transerred to the object s postve work, and energy
Chapter 3 and Chapter 4 Chapter 3 Energy 3. Introducton:Work Work W s energy transerred to or rom an object by means o a orce actng on the object. Energy transerred to the object s postve work, and energy
Physics 207 Lecture 6
 Physcs 207 Lecture 6 Agenda: Physcs 207, Lecture 6, Sept. 25 Chapter 4 Frames of reference Chapter 5 ewton s Law Mass Inerta s (contact and non-contact) Frcton (a external force that opposes moton) Free
Physcs 207 Lecture 6 Agenda: Physcs 207, Lecture 6, Sept. 25 Chapter 4 Frames of reference Chapter 5 ewton s Law Mass Inerta s (contact and non-contact) Frcton (a external force that opposes moton) Free
Lecture 09 Systems of Particles and Conservation of Linear Momentum
 Lecture 09 Systes o Partcles and Conseraton o Lnear oentu 9. Lnear oentu and Its Conseraton 9. Isolated Syste lnear oentu: P F dp dt d( dt d dt a solated syste F ext 0 dp dp F, F dt dt dp dp d F F 0, 0
Lecture 09 Systes o Partcles and Conseraton o Lnear oentu 9. Lnear oentu and Its Conseraton 9. Isolated Syste lnear oentu: P F dp dt d( dt d dt a solated syste F ext 0 dp dp F, F dt dt dp dp d F F 0, 0
NEWTON S LAWS. These laws only apply when viewed from an inertial coordinate system (unaccelerated system).
.") EWTO S LAWS Consder two partcles. 1 1. If 1 0 then 0 wth p 1 m1v. 1 1 2. 1.. 3. 11 These laws only apply when vewed from an nertal coordnate system (unaccelerated system). consder a collecton of partcles
EWTO S LAWS Consder two partcles. 1 1. If 1 0 then 0 wth p 1 m1v. 1 1 2. 1.. 3. 11 These laws only apply when vewed from an nertal coordnate system (unaccelerated system). consder a collecton of partcles
Physics 141. Lecture 14. Frank L. H. Wolfs Department of Physics and Astronomy, University of Rochester, Lecture 14, Page 1
 Physcs 141. Lecture 14. Frank L. H. Wolfs Department of Physcs and Astronomy, Unversty of Rochester, Lecture 14, Page 1 Physcs 141. Lecture 14. Course Informaton: Lab report # 3. Exam # 2. Mult-Partcle
Physcs 141. Lecture 14. Frank L. H. Wolfs Department of Physcs and Astronomy, Unversty of Rochester, Lecture 14, Page 1 Physcs 141. Lecture 14. Course Informaton: Lab report # 3. Exam # 2. Mult-Partcle
Physics 111 Final Exam, Fall 2013, Version A
 Physcs 111 Fnal Exam, Fall 013, Verson A Name (Prnt): 4 Dgt ID: Secton: Honors Code Pledge: For ethcal and farness reasons all students are pledged to comply wth the provsons of the NJIT Academc Honor
Physcs 111 Fnal Exam, Fall 013, Verson A Name (Prnt): 4 Dgt ID: Secton: Honors Code Pledge: For ethcal and farness reasons all students are pledged to comply wth the provsons of the NJIT Academc Honor
Four Bar Linkages in Two Dimensions. A link has fixed length and is joined to other links and also possibly to a fixed point.
 Four bar lnkages 1 Four Bar Lnkages n Two Dmensons lnk has fed length and s oned to other lnks and also possbly to a fed pont. The relatve velocty of end B wth regard to s gven by V B = ω r y v B B = +y
Four bar lnkages 1 Four Bar Lnkages n Two Dmensons lnk has fed length and s oned to other lnks and also possbly to a fed pont. The relatve velocty of end B wth regard to s gven by V B = ω r y v B B = +y
Our focus will be on linear systems. A system is linear if it obeys the principle of superposition and homogenity, i.e.
 SSTEM MODELLIN In order to solve a control syste proble, the descrptons of the syste and ts coponents ust be put nto a for sutable for analyss and evaluaton. The followng ethods can be used to odel physcal
SSTEM MODELLIN In order to solve a control syste proble, the descrptons of the syste and ts coponents ust be put nto a for sutable for analyss and evaluaton. The followng ethods can be used to odel physcal
SUMMARY Phys 2113 (General Physics I) Compiled by Prof. Erickson. v = r t. v = lim t 0. p = mv. a = v. a = lim
 Compiled by Prof. Erickson. v = r t. v = lim t 0. p = mv. a = v. a = lim") SUMMARY Phys 2113 (General Physcs I) Compled by Prof. Erckson Poston Vector (m): r = xˆx + yŷ + zẑ Average Velocty (m/s): v = r Instantaneous Velocty (m/s): v = lm 0 r = ṙ Lnear Momentum (kg m/s): p =
SUMMARY Phys 2113 (General Physcs I) Compled by Prof. Erckson Poston Vector (m): r = xˆx + yŷ + zẑ Average Velocty (m/s): v = r Instantaneous Velocty (m/s): v = lm 0 r = ṙ Lnear Momentum (kg m/s): p =
Solutions for Homework #9
 Solutons for Hoewor #9 PROBEM. (P. 3 on page 379 n the note) Consder a sprng ounted rgd bar of total ass and length, to whch an addtonal ass s luped at the rghtost end. he syste has no dapng. Fnd the natural
Solutons for Hoewor #9 PROBEM. (P. 3 on page 379 n the note) Consder a sprng ounted rgd bar of total ass and length, to whch an addtonal ass s luped at the rghtost end. he syste has no dapng. Fnd the natural
Celestial Mechanics. Basic Orbits. Why circles? Tycho Brahe. PHY celestial-mechanics - J. Hedberg
 PHY 454 - celestal-mechancs - J. Hedberg - 207 Celestal Mechancs. Basc Orbts. Why crcles? 2. Tycho Brahe 3. Kepler 4. 3 laws of orbtng bodes 2. Newtonan Mechancs 3. Newton's Laws. Law of Gravtaton 2. The
PHY 454 - celestal-mechancs - J. Hedberg - 207 Celestal Mechancs. Basc Orbts. Why crcles? 2. Tycho Brahe 3. Kepler 4. 3 laws of orbtng bodes 2. Newtonan Mechancs 3. Newton's Laws. Law of Gravtaton 2. The
1.3 Hence, calculate a formula for the force required to break the bond (i.e. the maximum value of F)
") EN40: Dynacs and Vbratons Hoework 4: Work, Energy and Lnear Moentu Due Frday March 6 th School of Engneerng Brown Unversty 1. The Rydberg potental s a sple odel of atoc nteractons. It specfes the potental
EN40: Dynacs and Vbratons Hoework 4: Work, Energy and Lnear Moentu Due Frday March 6 th School of Engneerng Brown Unversty 1. The Rydberg potental s a sple odel of atoc nteractons. It specfes the potental
Classical Mechanics ( Particles and Biparticles )
") Classcal Mechancs ( Partcles and Bpartcles ) Alejandro A. Torassa Creatve Commons Attrbuton 3.0 Lcense (0) Buenos Ares, Argentna atorassa@gmal.com Abstract Ths paper consders the exstence of bpartcles
Classcal Mechancs ( Partcles and Bpartcles ) Alejandro A. Torassa Creatve Commons Attrbuton 3.0 Lcense (0) Buenos Ares, Argentna atorassa@gmal.com Abstract Ths paper consders the exstence of bpartcles
PHYS 1443 Section 002
 PHYS 443 Secton 00 Lecture #6 Wednesday, Nov. 5, 008 Dr. Jae Yu Collsons Elastc and Inelastc Collsons Two Dmensonal Collsons Center o ass Fundamentals o Rotatonal otons Wednesday, Nov. 5, 008 PHYS PHYS
PHYS 443 Secton 00 Lecture #6 Wednesday, Nov. 5, 008 Dr. Jae Yu Collsons Elastc and Inelastc Collsons Two Dmensonal Collsons Center o ass Fundamentals o Rotatonal otons Wednesday, Nov. 5, 008 PHYS PHYS
Classical Mechanics Virtual Work & d Alembert s Principle
 Classcal Mechancs Vrtual Work & d Alembert s Prncple Dpan Kumar Ghosh UM-DAE Centre for Excellence n Basc Scences Kalna, Mumba 400098 August 15, 2016 1 Constrants Moton of a system of partcles s often
Classcal Mechancs Vrtual Work & d Alembert s Prncple Dpan Kumar Ghosh UM-DAE Centre for Excellence n Basc Scences Kalna, Mumba 400098 August 15, 2016 1 Constrants Moton of a system of partcles s often
Section 8.3 Polar Form of Complex Numbers
 80 Chapter 8 Secton 8 Polar Form of Complex Numbers From prevous classes, you may have encountered magnary numbers the square roots of negatve numbers and, more generally, complex numbers whch are the
80 Chapter 8 Secton 8 Polar Form of Complex Numbers From prevous classes, you may have encountered magnary numbers the square roots of negatve numbers and, more generally, complex numbers whch are the
Chapter 9. The Dot Product (Scalar Product) The Dot Product use (Scalar Product) The Dot Product (Scalar Product) The Cross Product.
 The Dot Product use (Scalar Product) The Dot Product (Scalar Product) The Cross Product.") The Dot Product (Scalar Product) Chapter 9 Statcs and Torque The dot product of two vectors can be constructed by takng the component of one vector n the drecton of the other and multplyng t tmes the magntude
The Dot Product (Scalar Product) Chapter 9 Statcs and Torque The dot product of two vectors can be constructed by takng the component of one vector n the drecton of the other and multplyng t tmes the magntude
Angular momentum. Instructor: Dr. Hoi Lam TAM ( 譚海嵐 )
") Angular momentum Instructor: Dr. Ho Lam TAM ( 譚海嵐 ) Physcs Enhancement Programme or Gted Students The Hong Kong Academy or Gted Educaton and Department o Physcs, HKBU Department o Physcs Hong Kong Baptst
Angular momentum Instructor: Dr. Ho Lam TAM ( 譚海嵐 ) Physcs Enhancement Programme or Gted Students The Hong Kong Academy or Gted Educaton and Department o Physcs, HKBU Department o Physcs Hong Kong Baptst
Physics 114 Exam 3 Spring Name:
 Physcs 114 Exam 3 Sprng 015 Name: For gradng purposes (do not wrte here): Queston 1. 1... 3. 3. Problem 4. Answer each of the followng questons. Ponts for each queston are ndcated n red. Unless otherwse
Physcs 114 Exam 3 Sprng 015 Name: For gradng purposes (do not wrte here): Queston 1. 1... 3. 3. Problem 4. Answer each of the followng questons. Ponts for each queston are ndcated n red. Unless otherwse
CHAPTER 6. LAGRANGE S EQUATIONS (Analytical Mechanics)
") CHAPTER 6 LAGRANGE S EQUATIONS (Analytcal Mechancs) 1 Ex. 1: Consder a partcle movng on a fxed horzontal surface. r P Let, be the poston and F be the total force on the partcle. The FBD s: -mgk F 1 x O
CHAPTER 6 LAGRANGE S EQUATIONS (Analytcal Mechancs) 1 Ex. 1: Consder a partcle movng on a fxed horzontal surface. r P Let, be the poston and F be the total force on the partcle. The FBD s: -mgk F 1 x O
PHYSICS 231 Review problems for midterm 2
 PHYSICS 31 Revew problems for mdterm Topc 5: Energy and Work and Power Topc 6: Momentum and Collsons Topc 7: Oscllatons (sprng and pendulum) Topc 8: Rotatonal Moton The nd exam wll be Wednesday October
PHYSICS 31 Revew problems for mdterm Topc 5: Energy and Work and Power Topc 6: Momentum and Collsons Topc 7: Oscllatons (sprng and pendulum) Topc 8: Rotatonal Moton The nd exam wll be Wednesday October
Class: Life-Science Subject: Physics
 Class: Lfe-Scence Subject: Physcs Frst year (6 pts): Graphc desgn of an energy exchange A partcle (B) of ass =g oves on an nclned plane of an nclned angle α = 3 relatve to the horzontal. We want to study
Class: Lfe-Scence Subject: Physcs Frst year (6 pts): Graphc desgn of an energy exchange A partcle (B) of ass =g oves on an nclned plane of an nclned angle α = 3 relatve to the horzontal. We want to study
RETURN ONLY THE SCANTRON SHEET!
 Andrzej Czajkowsk PHY/ exam Page out o Prncples o Physcs I PHY PHY Instructor: Dr. Andrzej Czajkowsk Fnal Exam December Closed book exam pages questons o equal value 5 correct answers pass the test! Duraton:
Andrzej Czajkowsk PHY/ exam Page out o Prncples o Physcs I PHY PHY Instructor: Dr. Andrzej Czajkowsk Fnal Exam December Closed book exam pages questons o equal value 5 correct answers pass the test! Duraton:
Rigid body simulation
 Rgd bod smulaton Rgd bod smulaton Once we consder an object wth spacal etent, partcle sstem smulaton s no longer suffcent Problems Problems Unconstraned sstem rotatonal moton torques and angular momentum
Rgd bod smulaton Rgd bod smulaton Once we consder an object wth spacal etent, partcle sstem smulaton s no longer suffcent Problems Problems Unconstraned sstem rotatonal moton torques and angular momentum
Work is the change in energy of a system (neglecting heat transfer). To examine what could
. To examine what could") Work Work s the change n energy o a system (neglectng heat transer). To eamne what could cause work, let s look at the dmensons o energy: L ML E M L F L so T T dmensonally energy s equal to a orce tmes
Work Work s the change n energy o a system (neglectng heat transer). To eamne what could cause work, let s look at the dmensons o energy: L ML E M L F L so T T dmensonally energy s equal to a orce tmes
Name (print neatly): Section #: First, write your name on this sheet and on the Scantron Card. The Physics faculty would like to help you do well:
: Section #: First, write your name on this sheet and on the Scantron Card. The Physics faculty would like to help you do well:") Name (prnt neatly): Secton #: Physcs 111 Exam Frst, wrte your name on ths sheet and on the Scantron Card. The Physcs faculty would lke to help you do well: 1. Budget your tme: 80 mnutes/0 questons=4 mn
Name (prnt neatly): Secton #: Physcs 111 Exam Frst, wrte your name on ths sheet and on the Scantron Card. The Physcs faculty would lke to help you do well: 1. Budget your tme: 80 mnutes/0 questons=4 mn
EN40: Dynamics and Vibrations. Final Examination Wed May : 2pm-5pm
 EN4: Dynacs and Vbratons Fnal Exanaton Wed May 1 17: p-5p School of Engneerng Brown Unversty NAME: General Instructons No collaboraton of any knd s pertted on ths exanaton. You ay brng double sded pages
EN4: Dynacs and Vbratons Fnal Exanaton Wed May 1 17: p-5p School of Engneerng Brown Unversty NAME: General Instructons No collaboraton of any knd s pertted on ths exanaton. You ay brng double sded pages
Physics 2A Chapter 3 HW Solutions
 Phscs A Chapter 3 HW Solutons Chapter 3 Conceptual Queston: 4, 6, 8, Problems: 5,, 8, 7, 3, 44, 46, 69, 70, 73 Q3.4. Reason: (a) C = A+ B onl A and B are n the same drecton. Sze does not matter. (b) C
Phscs A Chapter 3 HW Solutons Chapter 3 Conceptual Queston: 4, 6, 8, Problems: 5,, 8, 7, 3, 44, 46, 69, 70, 73 Q3.4. Reason: (a) C = A+ B onl A and B are n the same drecton. Sze does not matter. (b) C
Week 8: Chapter 9. Linear Momentum. Newton Law and Momentum. Linear Momentum, cont. Conservation of Linear Momentum. Conservation of Momentum, 2
 Lnear omentum Week 8: Chapter 9 Lnear omentum and Collsons The lnear momentum of a partcle, or an object that can be modeled as a partcle, of mass m movng wth a velocty v s defned to be the product of
Lnear omentum Week 8: Chapter 9 Lnear omentum and Collsons The lnear momentum of a partcle, or an object that can be modeled as a partcle, of mass m movng wth a velocty v s defned to be the product of
How does the momentum before an elastic and an inelastic collision compare to the momentum after the collision?
 Experent 9 Conseraton o Lnear Moentu - Collsons In ths experent you wll be ntroduced to the denton o lnear oentu. You wll learn the derence between an elastc and an nelastc collson. You wll explore how
Experent 9 Conseraton o Lnear Moentu - Collsons In ths experent you wll be ntroduced to the denton o lnear oentu. You wll learn the derence between an elastc and an nelastc collson. You wll explore how
Description of the Force Method Procedure. Indeterminate Analysis Force Method 1. Force Method con t. Force Method con t
 Indeternate Analyss Force Method The force (flexblty) ethod expresses the relatonshps between dsplaceents and forces that exst n a structure. Prary objectve of the force ethod s to deterne the chosen set
Indeternate Analyss Force Method The force (flexblty) ethod expresses the relatonshps between dsplaceents and forces that exst n a structure. Prary objectve of the force ethod s to deterne the chosen set
Remark: Positive work is done on an object when the point of application of the force moves in the direction of the force.
 Unt 5 Work and Energy 5. Work and knetc energy 5. Work - energy theore 5.3 Potenta energy 5.4 Tota energy 5.5 Energy dagra o a ass-sprng syste 5.6 A genera study o the potenta energy curve 5. Work and
Unt 5 Work and Energy 5. Work and knetc energy 5. Work - energy theore 5.3 Potenta energy 5.4 Tota energy 5.5 Energy dagra o a ass-sprng syste 5.6 A genera study o the potenta energy curve 5. Work and
1 Hz = one cycle per second
 Rotatonal Moton Mchael Fowler, UVa Physcs, 14E Sprng 009 Mar 5 Prelmnares: Unts for Angular Velocty The tachometer on your car dashboard tells you your car engne s angular speed n rpm, revolutons per mnute,
Rotatonal Moton Mchael Fowler, UVa Physcs, 14E Sprng 009 Mar 5 Prelmnares: Unts for Angular Velocty The tachometer on your car dashboard tells you your car engne s angular speed n rpm, revolutons per mnute,
Chapter 8. Potential Energy and Conservation of Energy
 Chapter 8 Potental Energy and Conservaton of Energy In ths chapter we wll ntroduce the followng concepts: Potental Energy Conservatve and non-conservatve forces Mechancal Energy Conservaton of Mechancal
Chapter 8 Potental Energy and Conservaton of Energy In ths chapter we wll ntroduce the followng concepts: Potental Energy Conservatve and non-conservatve forces Mechancal Energy Conservaton of Mechancal
Physics 207 Lecture 13. Lecture 13
 Physcs 07 Lecture 3 Goals: Lecture 3 Chapter 0 Understand the relatonshp between moton and energy Defne Potental Energy n a Hooke s Law sprng Develop and explot conservaton of energy prncple n problem
Physcs 07 Lecture 3 Goals: Lecture 3 Chapter 0 Understand the relatonshp between moton and energy Defne Potental Energy n a Hooke s Law sprng Develop and explot conservaton of energy prncple n problem
1. Review of Mechanics Newton s Laws
 . Revew of Mechancs.. Newton s Laws Moton of partcles. Let the poston of the partcle be gven by r. We can always express ths n Cartesan coordnates: r = xˆx + yŷ + zẑ, () where we wll always use ˆ (crcumflex)
. Revew of Mechancs.. Newton s Laws Moton of partcles. Let the poston of the partcle be gven by r. We can always express ths n Cartesan coordnates: r = xˆx + yŷ + zẑ, () where we wll always use ˆ (crcumflex)
Spring Force and Power
 Lecture 13 Chapter 9 Sprng Force and Power Yeah, energy s better than orces. What s net? Course webste: http://aculty.uml.edu/andry_danylov/teachng/physcsi IN THIS CHAPTER, you wll learn how to solve problems
Lecture 13 Chapter 9 Sprng Force and Power Yeah, energy s better than orces. What s net? Course webste: http://aculty.uml.edu/andry_danylov/teachng/physcsi IN THIS CHAPTER, you wll learn how to solve problems
Physics 207 Lecture 16
 Physcs 07 Lectue 6 Goals: Lectue 6 Chapte Extend the patcle odel to gd-bodes Undestand the equlbu of an extended object. Analyze ollng oton Undestand otaton about a fxed axs. Eploy consevaton of angula
Physcs 07 Lectue 6 Goals: Lectue 6 Chapte Extend the patcle odel to gd-bodes Undestand the equlbu of an extended object. Analyze ollng oton Undestand otaton about a fxed axs. Eploy consevaton of angula
11. Dynamics in Rotating Frames of Reference
 Unversty of Rhode Island DgtalCommons@URI Classcal Dynamcs Physcs Course Materals 2015 11. Dynamcs n Rotatng Frames of Reference Gerhard Müller Unversty of Rhode Island, gmuller@ur.edu Creatve Commons
Unversty of Rhode Island DgtalCommons@URI Classcal Dynamcs Physcs Course Materals 2015 11. Dynamcs n Rotatng Frames of Reference Gerhard Müller Unversty of Rhode Island, gmuller@ur.edu Creatve Commons
10/2/2003 PHY Lecture 9 1
 Announceents. Exa wll be returned at the end of class. Please rework the exa, to help soldfy your knowledge of ths ateral. (Up to 0 extra cre ponts granted for reworked exa turn n old exa, correctons on
Announceents. Exa wll be returned at the end of class. Please rework the exa, to help soldfy your knowledge of ths ateral. (Up to 0 extra cre ponts granted for reworked exa turn n old exa, correctons on
ELASTIC WAVE PROPAGATION IN A CONTINUOUS MEDIUM
 ELASTIC WAVE PROPAGATION IN A CONTINUOUS MEDIUM An elastc wave s a deformaton of the body that travels throughout the body n all drectons. We can examne the deformaton over a perod of tme by fxng our look
ELASTIC WAVE PROPAGATION IN A CONTINUOUS MEDIUM An elastc wave s a deformaton of the body that travels throughout the body n all drectons. We can examne the deformaton over a perod of tme by fxng our look
MTH 263 Practice Test #1 Spring 1999
 Pat Ross MTH 6 Practce Test # Sprng 999 Name. Fnd the area of the regon bounded by the graph r =acos (θ). Observe: Ths s a crcle of radus a, for r =acos (θ) r =a ³ x r r =ax x + y =ax x ax + y =0 x ax
Pat Ross MTH 6 Practce Test # Sprng 999 Name. Fnd the area of the regon bounded by the graph r =acos (θ). Observe: Ths s a crcle of radus a, for r =acos (θ) r =a ³ x r r =ax x + y =ax x ax + y =0 x ax
A particle in a state of uniform motion remain in that state of motion unless acted upon by external force.
 The fundamental prncples of classcal mechancs were lad down by Galleo and Newton n the 16th and 17th centures. In 1686, Newton wrote the Prncpa where he gave us three laws of moton, one law of gravty,
The fundamental prncples of classcal mechancs were lad down by Galleo and Newton n the 16th and 17th centures. In 1686, Newton wrote the Prncpa where he gave us three laws of moton, one law of gravty,
Physics 5153 Classical Mechanics. D Alembert s Principle and The Lagrangian-1
 P. Guterrez Physcs 5153 Classcal Mechancs D Alembert s Prncple and The Lagrangan 1 Introducton The prncple of vrtual work provdes a method of solvng problems of statc equlbrum wthout havng to consder the
P. Guterrez Physcs 5153 Classcal Mechancs D Alembert s Prncple and The Lagrangan 1 Introducton The prncple of vrtual work provdes a method of solvng problems of statc equlbrum wthout havng to consder the