Contrôle de position ultra-rapide d un objet nanométrique
|
|
|
- Ruth Wood
- 6 years ago
- Views:
Transcription




1 Contrôle de position ultra-rapide d un objet nanométrique présenté par Alina VODA alina.voda@gipsa-lab.grenoble-inp.fr sur la base de la thèse de Irfan AHMAD, co-encadrée avec Gildas BESANCON plate-forme conçué et réalisée avec Sylvain BLANVILLAIN et l équipe technique du département d Automatique UNIVERSIT E DE GRENOBLE


2 meter Context 2
3 Presentation Outline Introduction Tunneling current Applications System Analysis and Control System modeling Control problem and desired performances Controller design and simulations Experimental Application and Extension Experimental setup Experimental results Conclusions and Perspectives 3
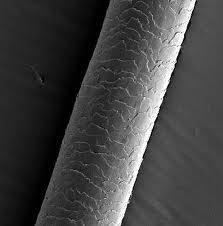
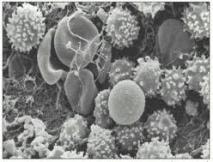
4 Introduction Distance d 3 nm 2 nm 1 nm 0 - Tip V b 10-9 Distance (m) 1,2 1 0,8 0,6 0,4 0,2 0 Tunneling Current (A) Surface 4
5 Introduction y z x V b V b 5
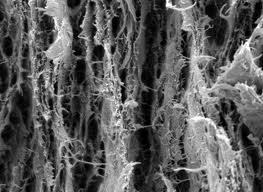
6 Introduction V b 6
7 Introduction Performance compromises Range Nonlinearities Stability Dynamic nonlinearities Quantization Waterbed effect Modeling errors Coupling effects Noise Precision Noise Bandwidth Study, propose and experimentally validate modern control laws in order to deal with nanopositioning issues using tunneling current. V b 7

8 System Analysis and Control System Description: V b Surface Variations z S Initial Distance d 0 d Tunneling i t i des v ref Reference Feedback Control DAC v 1 v 2 Voltage Amplifier Piezoelectric Actuator z - Current v b ADC v y v 3 Current Sensor n Noise 8





9 System Analysis and Control Voltage ampli er: Piezoelectric actuator: Tunneling current: Current sensor: 9


10 System Analysis and Control Surface Variations z S v 1 Voltage v 2 Amplifier Initial Distance Piezoelectric Actuator d 0 z - d Tunneling Current i t Current Sensor v 3 n v y v b Noise 10

11 System Analysis and Control d Tunneling Current i t Current v 3 Logarithmic v y Sensor Amplifier v b Approximate linearization around an operating point: 11


12 System Analysis and Control G(s) z S v 1 i t = 3rd order feed-forward transfer function = 1st order feedback transfer function v y = tunneling current constant n 12


13 System Analysis and Control 13
14 System Analysis and Control V b Control objectives can be expressed by means of constraints on the shape of closed-loop sensitivity functions. 14
15 System Analysis and Control z S K S o S o G S o c 1 v ref - v e K v 1 G f i t T v y G b -T G n n 15
16 System Analysis and Control 16
17 System Analysis and Control K v ref T - 1 / S v 1 R v y 17

18 System Analysis and Control 18

19 System Analysis and Control 19

20 System Analysis and Control 20
21 System Analysis and Control P(s) v ref w = z S n u = v 1 P(s) K(s) e = v e y 1 y = y 2 y 3 v ref z s n v 1 c 1 G f G n W u W t G b - i t K(s) v y W p y 1 y 2 y 3 v e 21
22 System Analysis and Control v ref y 1 y 1 y 2 y 3 W p W u W t G z S c 1 w = z S n u = v 1 P(s) K(s) y = y 2 e = v e y 3 v ref - v e K G f v 1 i t v y G b G n n 22

23 System Analysis and Control 23

24 System Analysis and Control 24
25 System Analysis and Control 25

26 Experimental Application and Extension 26
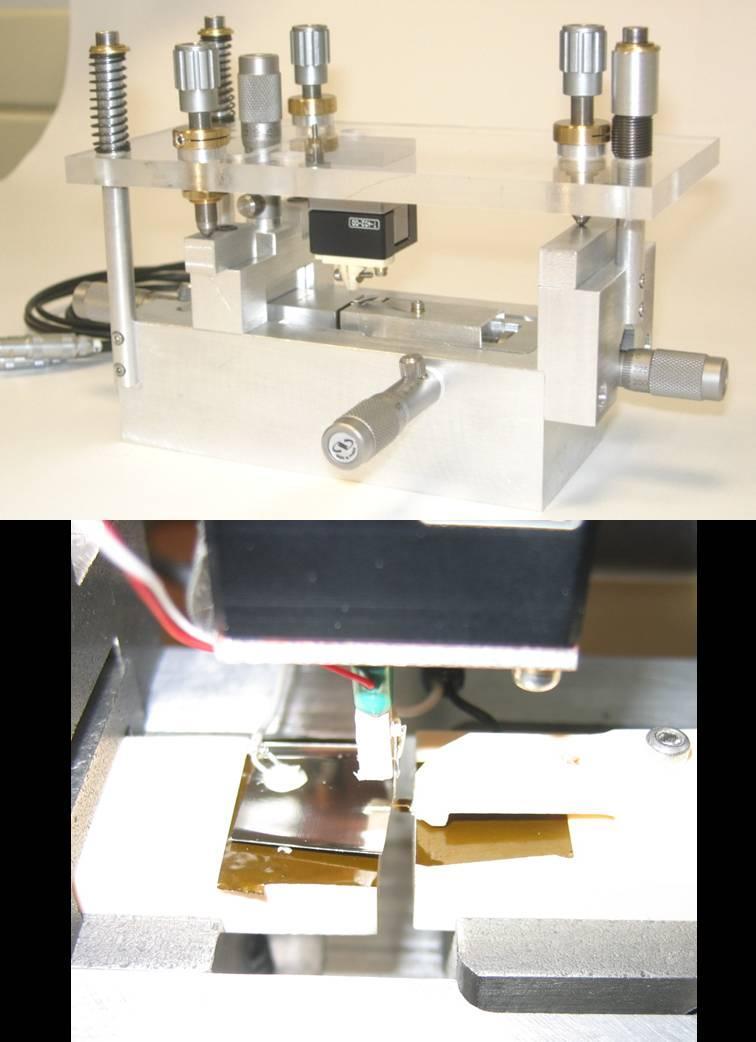
![piezoelectric actuator Experimental Application and Extension [-20V - 130 V] voltage amplifier reconstruction filter v z v y v x [0-10 V] [0-10 V]](/docs-images/75/71607996/images/27-0.jpg "acquisition card PCI bus current sensor anti-aliasing filter [0-10 na] [0-10 V] [0-10 V] acquisition card target PC development PC V b electrically")
27 piezoelectric actuator Experimental Application and Extension [-20V V] voltage amplifier reconstruction filter v z v y v x [0-10 V] [0-10 V] acquisition card PCI bus current sensor anti-aliasing filter [0-10 na] [0-10 V] [0-10 V] acquisition card target PC development PC V b electrically conducting surface 27
28 Experimental Application and Extension 28
29 Experimental Application and Extension 29
30 Experimental Application and Extension v ref z S Surface Variations v e v 1 d 0 v Initial Distance d Tunnel i ref t Current v 1 Voltage v Piezoelectric Controller DAC 2 z - - v e Amplifier Actuator v b ADC v y v 3 Current Sensor v y n Noise 30
31 Experimental Application and Extension 31



32 Experimental Application and Extension Sensitivity Functions validation with Templates Template for sensitivity function Sensitivity obtained with controller Sensitivity obtained with PI controller 32

33 Experimental Application and Extension 33
34 Experimental Application and Extension 34
35 Experimental Application and Extension 35

36 Experimental Application and Extension 36
37 Experimental Application and Extension 37
38 Experimental Application and Extension Comparison of power spectral densities of tunneling current with different reference values 38
39 Experimental Application and Extension 39
40 Experimental Application and Extension Voltage Amplifier Horizontal (x) Dynamics of Piezoelectric Actuator u h v 1h z h v h Capacitive Sensor 40
41 Experimental Application and Extension 41
42 Experimental Application and Extension 42
43 Experimental Application and Extension 43
44 Experimental Application and Extension Closed loop reference tracking with controller designed by pole placement with sensitivity function shaping for the horizontal movement of the piezoelectric actuator with compensation of hysteresis phenomenon. 44
45 Experimental Application and Extension 45
46 Experimental Application and Extension Complete Plant hv ref - v eh Horizontal Control u h v 1h Horizontal (x) Dynamics z h Capacitive Sensor v h z h Voltage Amplifier Piezoelectric Actuator Cross-Coupling Dynamics vv ref - v ev Vertical Control u v v 1v Vertical (z) Dynamics z v - z c d Tunnel Current i t Current Sensor v 2v v v Surface Variations z S Noise n 46
47 Experimental Application and Extension 47

48 Experimental Application and Extension 48

49 Experimental Application and Extension 49
50 Experimental Application and Extension Complete Plant hv ref - v eh u h v 1h Horizontal (x) Dynamics z h Capacitive Sensor v h z h MIMO Controller Voltage Amplifier Piezoelectric Actuator Cross-Coupling Dynamics vv ref - v ev u v v 1v Vertical (z) Dynamics z v z c - d Tunnel Current i t Current Sensor v 2v v v Surface Variations z S Noise n 50

51 Experimental Application and Extension 51
52 Conclusions A dynamic modeling corresponding to the considered system of tunneling current has been proposed. Two robust control techniques, firstly pole placement with sensitivity function shaping method and then mixed-sensitivity H approach, have been used and a comparison with the more conventionally used classical PI controller has been performed. The experimental validation (at ambient atmosphere) of the proposed control schemes, while working at nanometer scale, has been performed. A Linear Quadratic Regulator (LQR) approach has been analyzed in simulation for the MIMO control of the plant having horizontal, vertical and cross coupling dynamics in order to resolve coupling caused positioning errors. 52
53 Perspectives Modifications in the hardware can be made in order to achieve large closed-loop bandwidth by increasing the bandwidth of the voltage amplifier. The exact reason of the peak at low frequency during PSD analysis is not determined yet which needs to be identified to further enhance the performance. Exact model of cross-coupling dynamics needs to be identified. The experimentally observed hysteresis and creep phenomenon needs to be modeled and then compensated in order to enhance the tracking performance. The further analysis of the performance of the tunneling current measurement system can be performed with an oscillating sample surface. The impact of a better tunneling current measurement can be analyzed in various other applications, and for instance when using tunneling current as a displacement sensor. 53
54 Thank you for your attention! 54
Robust H Control of a Scanning Tunneling Microscope under Parametric Uncertainties
 2010 American Control Conference Marriott Waterfront, Baltimore, MD, USA June 30-July 02, 2010 FrC08.6 Robust H Control of a Scanning Tunneling Microscope under Parametric Uncertainties Irfan Ahmad, Alina
2010 American Control Conference Marriott Waterfront, Baltimore, MD, USA June 30-July 02, 2010 FrC08.6 Robust H Control of a Scanning Tunneling Microscope under Parametric Uncertainties Irfan Ahmad, Alina
Pour obtenir le grade de. Arrêté ministériel : 7 août «Irfan AHMAD»
 THÈSE Pour obtenir le grade de DOCTEUR DE L UNIVERSITÉ DE GRENOBLE Spécialité : AUTOMATIQUE - PRODUCTIQUE Arrêté ministériel : 7 août 2006 Présentée par «Irfan AHMAD» Thèse dirigée par «Alina VODA» et
THÈSE Pour obtenir le grade de DOCTEUR DE L UNIVERSITÉ DE GRENOBLE Spécialité : AUTOMATIQUE - PRODUCTIQUE Arrêté ministériel : 7 août 2006 Présentée par «Irfan AHMAD» Thèse dirigée par «Alina VODA» et
Experimental model inverse-based hysteresis compensation on a piezoelectric actuator
 Experimental model inverse-based hysteresis compensation on a piezoelectric actuator R. OUBELLIL, 1 L. Ryba, 1 A. Voda, 1 M. Rakotondrabe, 2 1 GIPSA-lab, Grenoble Images Parole Signal Automatique 2 FEMTO-ST,
Experimental model inverse-based hysteresis compensation on a piezoelectric actuator R. OUBELLIL, 1 L. Ryba, 1 A. Voda, 1 M. Rakotondrabe, 2 1 GIPSA-lab, Grenoble Images Parole Signal Automatique 2 FEMTO-ST,
CM 3310 Process Control, Spring Lecture 21
 CM 331 Process Control, Spring 217 Instructor: Dr. om Co Lecture 21 (Back to Process Control opics ) General Control Configurations and Schemes. a) Basic Single-Input/Single-Output (SISO) Feedback Figure
CM 331 Process Control, Spring 217 Instructor: Dr. om Co Lecture 21 (Back to Process Control opics ) General Control Configurations and Schemes. a) Basic Single-Input/Single-Output (SISO) Feedback Figure
The interpretation of STM images in light of Tersoff and Hamann tunneling model
 The interpretation of STM images in light of Tersoff and Hamann tunneling model The STM image represents contour maps of constant surface LDOS at E F, evaluated at the center of the curvature of the tip.
The interpretation of STM images in light of Tersoff and Hamann tunneling model The STM image represents contour maps of constant surface LDOS at E F, evaluated at the center of the curvature of the tip.
CDS 101/110a: Lecture 8-1 Frequency Domain Design
 CDS 11/11a: Lecture 8-1 Frequency Domain Design Richard M. Murray 17 November 28 Goals: Describe canonical control design problem and standard performance measures Show how to use loop shaping to achieve
CDS 11/11a: Lecture 8-1 Frequency Domain Design Richard M. Murray 17 November 28 Goals: Describe canonical control design problem and standard performance measures Show how to use loop shaping to achieve
YTÜ Mechanical Engineering Department
 YTÜ Mechanical Engineering Department Lecture of Special Laboratory of Machine Theory, System Dynamics and Control Division Coupled Tank 1 Level Control with using Feedforward PI Controller Lab Date: Lab
YTÜ Mechanical Engineering Department Lecture of Special Laboratory of Machine Theory, System Dynamics and Control Division Coupled Tank 1 Level Control with using Feedforward PI Controller Lab Date: Lab
Plug-In Robust Compensator for a 3 DOF Piezoelectric Nanorobotic Positioner
 Proceedings of the 17th World Congress The International Federation of Automatic Control Seoul, Korea, July 6-11, 28 Plug-In Robust Compensator for a 3 DOF Piezoelectric Nanorobotic Positioner Abdoulaye
Proceedings of the 17th World Congress The International Federation of Automatic Control Seoul, Korea, July 6-11, 28 Plug-In Robust Compensator for a 3 DOF Piezoelectric Nanorobotic Positioner Abdoulaye
New open-loop actuating method of piezoelectric actuators for removing hysteresis and creep
 REVIEW OF SCIENTIFIC INSTRUMENTS VOLUME 71, NUMBER 9 SEPTEMBER 2000 New open-loop actuating method of piezoelectric actuators for removing hysteresis and creep Hewon Jung, Jong Youp Shim, and DaeGab Gweon
REVIEW OF SCIENTIFIC INSTRUMENTS VOLUME 71, NUMBER 9 SEPTEMBER 2000 New open-loop actuating method of piezoelectric actuators for removing hysteresis and creep Hewon Jung, Jong Youp Shim, and DaeGab Gweon
Dr Ian R. Manchester Dr Ian R. Manchester AMME 3500 : Review
 Week Date Content Notes 1 6 Mar Introduction 2 13 Mar Frequency Domain Modelling 3 20 Mar Transient Performance and the s-plane 4 27 Mar Block Diagrams Assign 1 Due 5 3 Apr Feedback System Characteristics
Week Date Content Notes 1 6 Mar Introduction 2 13 Mar Frequency Domain Modelling 3 20 Mar Transient Performance and the s-plane 4 27 Mar Block Diagrams Assign 1 Due 5 3 Apr Feedback System Characteristics
YTÜ Mechanical Engineering Department
 YTÜ Mechanical Engineering Department Lecture of Special Laboratory of Machine Theory, System Dynamics and Control Division Coupled Tank 1 Level Control with using Feedforward PI Controller Lab Report
YTÜ Mechanical Engineering Department Lecture of Special Laboratory of Machine Theory, System Dynamics and Control Division Coupled Tank 1 Level Control with using Feedforward PI Controller Lab Report
Simultaneous Suppression of Badly-Damped Vibrations and Cross-couplings in a 2-DoF Piezoelectric Actuator, by using Feedforward Standard H approach
 Simultaneous Suppression of Badly-Damped Vibrations and Cross-couplings in a 2-DoF Piezoelectric Actuator, by using Feedforward Standard H approach Didace HABINEZA, Micky RAKOTONDRABE and Yann LE GORREC
Simultaneous Suppression of Badly-Damped Vibrations and Cross-couplings in a 2-DoF Piezoelectric Actuator, by using Feedforward Standard H approach Didace HABINEZA, Micky RAKOTONDRABE and Yann LE GORREC
 Department of Electronics and Instrumentation Engineering M. E- CONTROL AND INSTRUMENTATION ENGINEERING CL7101 CONTROL SYSTEM DESIGN Unit I- BASICS AND ROOT-LOCUS DESIGN PART-A (2 marks) 1. What are the
Department of Electronics and Instrumentation Engineering M. E- CONTROL AND INSTRUMENTATION ENGINEERING CL7101 CONTROL SYSTEM DESIGN Unit I- BASICS AND ROOT-LOCUS DESIGN PART-A (2 marks) 1. What are the
CDS 101/110a: Lecture 10-1 Robust Performance
 CDS 11/11a: Lecture 1-1 Robust Performance Richard M. Murray 1 December 28 Goals: Describe how to represent uncertainty in process dynamics Describe how to analyze a system in the presence of uncertainty
CDS 11/11a: Lecture 1-1 Robust Performance Richard M. Murray 1 December 28 Goals: Describe how to represent uncertainty in process dynamics Describe how to analyze a system in the presence of uncertainty
Lecture 6 Classical Control Overview IV. Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore
 Lecture 6 Classical Control Overview IV Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore Lead Lag Compensator Design Dr. Radhakant Padhi Asst.
Lecture 6 Classical Control Overview IV Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore Lead Lag Compensator Design Dr. Radhakant Padhi Asst.
Data Converter Fundamentals
 Data Converter Fundamentals David Johns and Ken Martin (johns@eecg.toronto.edu) (martin@eecg.toronto.edu) slide 1 of 33 Introduction Two main types of converters Nyquist-Rate Converters Generate output
Data Converter Fundamentals David Johns and Ken Martin (johns@eecg.toronto.edu) (martin@eecg.toronto.edu) slide 1 of 33 Introduction Two main types of converters Nyquist-Rate Converters Generate output
Creep characteristics of piezoelectric actuators
 REVIEW OF SCIENTIFIC INSTRUMENTS VOLUME 71, NUMBER 4 APRIL 2000 Creep characteristics of piezoelectric actuators Hewon Jung a) and Dae-Gab Gweon Department of Mechanical Engineering ME3265, Korea Advanced
REVIEW OF SCIENTIFIC INSTRUMENTS VOLUME 71, NUMBER 4 APRIL 2000 Creep characteristics of piezoelectric actuators Hewon Jung a) and Dae-Gab Gweon Department of Mechanical Engineering ME3265, Korea Advanced
Outline. Classical Control. Lecture 1
 Outline Outline Outline 1 Introduction 2 Prerequisites Block diagram for system modeling Modeling Mechanical Electrical Outline Introduction Background Basic Systems Models/Transfers functions 1 Introduction
Outline Outline Outline 1 Introduction 2 Prerequisites Block diagram for system modeling Modeling Mechanical Electrical Outline Introduction Background Basic Systems Models/Transfers functions 1 Introduction
Control Systems. State Estimation.
 State Estimation chibum@seoultech.ac.kr Outline Dominant pole design Symmetric root locus State estimation We are able to place the CLPs arbitrarily by feeding back all the states: u = Kx. But these may
State Estimation chibum@seoultech.ac.kr Outline Dominant pole design Symmetric root locus State estimation We are able to place the CLPs arbitrarily by feeding back all the states: u = Kx. But these may
Goodwin, Graebe, Salgado, Prentice Hall Chapter 11. Chapter 11. Dealing with Constraints
 Chapter 11 Dealing with Constraints Topics to be covered An ubiquitous problem in control is that all real actuators have limited authority. This implies that they are constrained in amplitude and/or rate
Chapter 11 Dealing with Constraints Topics to be covered An ubiquitous problem in control is that all real actuators have limited authority. This implies that they are constrained in amplitude and/or rate
Robust Loop Shaping Force Feedback Controller
 Robust Loop Shaping Force Feedback Controller Dynamic For Effective Force Force Control Testing Using Loop Shaping Paper Title N. Nakata & E. Krug Johns Hopkins University, USA SUMMARY: Effective force
Robust Loop Shaping Force Feedback Controller Dynamic For Effective Force Force Control Testing Using Loop Shaping Paper Title N. Nakata & E. Krug Johns Hopkins University, USA SUMMARY: Effective force
Today (10/23/01) Today. Reading Assignment: 6.3. Gain/phase margin lead/lag compensator Ref. 6.4, 6.7, 6.10
 Today. Reading Assignment: 6.3. Gain/phase margin lead/lag compensator Ref. 6.4, 6.7, 6.10") Today Today (10/23/01) Gain/phase margin lead/lag compensator Ref. 6.4, 6.7, 6.10 Reading Assignment: 6.3 Last Time In the last lecture, we discussed control design through shaping of the loop gain GK:
Today Today (10/23/01) Gain/phase margin lead/lag compensator Ref. 6.4, 6.7, 6.10 Reading Assignment: 6.3 Last Time In the last lecture, we discussed control design through shaping of the loop gain GK:
MTNS 06, Kyoto (July, 2006) Shinji Hara The University of Tokyo, Japan
 Shinji Hara The University of Tokyo, Japan") MTNS 06, Kyoto (July, 2006) Shinji Hara The University of Tokyo, Japan Outline Motivation & Background: H2 Tracking Performance Limits: new paradigm Explicit analytical solutions with examples H2 Regulation
MTNS 06, Kyoto (July, 2006) Shinji Hara The University of Tokyo, Japan Outline Motivation & Background: H2 Tracking Performance Limits: new paradigm Explicit analytical solutions with examples H2 Regulation
Inter-Ing 2005 INTERDISCIPLINARITY IN ENGINEERING SCIENTIFIC CONFERENCE WITH INTERNATIONAL PARTICIPATION, TG. MUREŞ ROMÂNIA, NOVEMBER 2005.
 Inter-Ing 5 INTERDISCIPLINARITY IN ENGINEERING SCIENTIFIC CONFERENCE WITH INTERNATIONAL PARTICIPATION, TG. MUREŞ ROMÂNIA, 1-11 NOVEMBER 5. DESIGN OF A SIMPLE DIGITAL CONTROLLER FOR A MAGNETIC LEVITATION
Inter-Ing 5 INTERDISCIPLINARITY IN ENGINEERING SCIENTIFIC CONFERENCE WITH INTERNATIONAL PARTICIPATION, TG. MUREŞ ROMÂNIA, 1-11 NOVEMBER 5. DESIGN OF A SIMPLE DIGITAL CONTROLLER FOR A MAGNETIC LEVITATION
Control of Thermoacoustic Instabilities: Actuator Placement
 Control of Thermoacoustic Instabilities: Actuator Placement Pushkarini Agharkar, Priya Subramanian, Prof. R. I. Sujith Department of Aerospace Engineering Prof. Niket Kaisare Department of Chemical Engineering
Control of Thermoacoustic Instabilities: Actuator Placement Pushkarini Agharkar, Priya Subramanian, Prof. R. I. Sujith Department of Aerospace Engineering Prof. Niket Kaisare Department of Chemical Engineering
Effect of adaptive telescope mirror dynamics on the residual of atmospheric turbulence correction
 Effect of adaptive telescope mirror dynamics on the residual of atmospheric turbulence correction Armando Riccardi ABSTRACT In the present report we quantify the residual error of the correction of the
Effect of adaptive telescope mirror dynamics on the residual of atmospheric turbulence correction Armando Riccardi ABSTRACT In the present report we quantify the residual error of the correction of the
D(s) G(s) A control system design definition
 G(s) A control system design definition") R E Compensation D(s) U Plant G(s) Y Figure 7. A control system design definition x x x 2 x 2 U 2 s s 7 2 Y Figure 7.2 A block diagram representing Eq. (7.) in control form z U 2 s z Y 4 z 2 s z 2 3 Figure
R E Compensation D(s) U Plant G(s) Y Figure 7. A control system design definition x x x 2 x 2 U 2 s s 7 2 Y Figure 7.2 A block diagram representing Eq. (7.) in control form z U 2 s z Y 4 z 2 s z 2 3 Figure
FURTHER RESULTS ON ROBUST CONTROL OF MICROVIBRATIONS ON MASS LOADED PANELS
 FURTHER RESULTS ON ROBUST CONTROL OF MICROVIBRATIONS ON MASS LOADED PANELS G. S. Aglietti, J. Stoustrup, E. Rogers, R. S. Langley, S. B. Gabriel, Depts. of Aero & Astro/Electronics and Computer Science,
FURTHER RESULTS ON ROBUST CONTROL OF MICROVIBRATIONS ON MASS LOADED PANELS G. S. Aglietti, J. Stoustrup, E. Rogers, R. S. Langley, S. B. Gabriel, Depts. of Aero & Astro/Electronics and Computer Science,
SWITCHED CAPACITOR AMPLIFIERS
 SWITCHED CAPACITOR AMPLIFIERS AO 0V 4. AO 0V 4.2 i Q AO 0V 4.3 Q AO 0V 4.4 Q i AO 0V 4.5 AO 0V 4.6 i Q AO 0V 4.7 Q AO 0V 4.8 i Q AO 0V 4.9 Simple amplifier First approach: A 0 = infinite. C : V C = V s
SWITCHED CAPACITOR AMPLIFIERS AO 0V 4. AO 0V 4.2 i Q AO 0V 4.3 Q AO 0V 4.4 Q i AO 0V 4.5 AO 0V 4.6 i Q AO 0V 4.7 Q AO 0V 4.8 i Q AO 0V 4.9 Simple amplifier First approach: A 0 = infinite. C : V C = V s
Solution for Mechanical Measurement & Control
 Solution for Mechanical Measurement & Control December-2015 Index Q.1) a). 2-3 b).3-4 c). 5 d). 6 Q.2) a). 7 b). 7 to 9 c). 10-11 Q.3) a). 11-12 b). 12-13 c). 13 Q.4) a). 14-15 b). 15 (N.A.) Q.5) a). 15
Solution for Mechanical Measurement & Control December-2015 Index Q.1) a). 2-3 b).3-4 c). 5 d). 6 Q.2) a). 7 b). 7 to 9 c). 10-11 Q.3) a). 11-12 b). 12-13 c). 13 Q.4) a). 14-15 b). 15 (N.A.) Q.5) a). 15
7.Piezoelectric, Accelerometer and Laser Sensors
 7.Piezoelectric, Accelerometer and Laser Sensors 7.1 Piezoelectric sensors: (Silva p.253) Piezoelectric materials such as lead-zirconate-titanate (PZT) can generate electrical charge and potential difference
7.Piezoelectric, Accelerometer and Laser Sensors 7.1 Piezoelectric sensors: (Silva p.253) Piezoelectric materials such as lead-zirconate-titanate (PZT) can generate electrical charge and potential difference
Repetitive control : Power Electronics. Applications
 Repetitive control : Power Electronics Applications Ramon Costa Castelló Advanced Control of Energy Systems (ACES) Instituto de Organización y Control (IOC) Universitat Politècnica de Catalunya (UPC) Barcelona,
Repetitive control : Power Electronics Applications Ramon Costa Castelló Advanced Control of Energy Systems (ACES) Instituto de Organización y Control (IOC) Universitat Politècnica de Catalunya (UPC) Barcelona,
Chapter 3. LQ, LQG and Control System Design. Dutch Institute of Systems and Control
 Chapter 3 LQ, LQG and Control System H 2 Design Overview LQ optimization state feedback LQG optimization output feedback H 2 optimization non-stochastic version of LQG Application to feedback system design
Chapter 3 LQ, LQG and Control System H 2 Design Overview LQ optimization state feedback LQG optimization output feedback H 2 optimization non-stochastic version of LQG Application to feedback system design
EL2520 Control Theory and Practice
 EL2520 Control Theory and Practice Lecture 8: Linear quadratic control Mikael Johansson School of Electrical Engineering KTH, Stockholm, Sweden Linear quadratic control Allows to compute the controller
EL2520 Control Theory and Practice Lecture 8: Linear quadratic control Mikael Johansson School of Electrical Engineering KTH, Stockholm, Sweden Linear quadratic control Allows to compute the controller
CDS 101/110a: Lecture 10-2 Control Systems Implementation
 CDS 101/110a: Lecture 10-2 Control Systems Implementation Richard M. Murray 5 December 2012 Goals Provide an overview of the key principles, concepts and tools from control theory - Classical control -
CDS 101/110a: Lecture 10-2 Control Systems Implementation Richard M. Murray 5 December 2012 Goals Provide an overview of the key principles, concepts and tools from control theory - Classical control -
Linear State Feedback Controller Design
 Assignment For EE5101 - Linear Systems Sem I AY2010/2011 Linear State Feedback Controller Design Phang Swee King A0033585A Email: king@nus.edu.sg NGS/ECE Dept. Faculty of Engineering National University
Assignment For EE5101 - Linear Systems Sem I AY2010/2011 Linear State Feedback Controller Design Phang Swee King A0033585A Email: king@nus.edu.sg NGS/ECE Dept. Faculty of Engineering National University
Here represents the impulse (or delta) function. is an diagonal matrix of intensities, and is an diagonal matrix of intensities.
 function. is an diagonal matrix of intensities, and is an diagonal matrix of intensities.") 19 KALMAN FILTER 19.1 Introduction In the previous section, we derived the linear quadratic regulator as an optimal solution for the fullstate feedback control problem. The inherent assumption was that
19 KALMAN FILTER 19.1 Introduction In the previous section, we derived the linear quadratic regulator as an optimal solution for the fullstate feedback control problem. The inherent assumption was that
Piezo Theory: Chapter 1 - Physics & Design
 Piezoelectric effect inverse piezoelectric effect The result of external forces to a piezoelectric material is positive and negative electrical charges at the surface of the material. If electrodes are
Piezoelectric effect inverse piezoelectric effect The result of external forces to a piezoelectric material is positive and negative electrical charges at the surface of the material. If electrodes are
Lecture 12. Upcoming labs: Final Exam on 12/21/2015 (Monday)10:30-12:30
10:30-12:30") 289 Upcoming labs: Lecture 12 Lab 20: Internal model control (finish up) Lab 22: Force or Torque control experiments [Integrative] (2-3 sessions) Final Exam on 12/21/2015 (Monday)10:30-12:30 Today: Recap
289 Upcoming labs: Lecture 12 Lab 20: Internal model control (finish up) Lab 22: Force or Torque control experiments [Integrative] (2-3 sessions) Final Exam on 12/21/2015 (Monday)10:30-12:30 Today: Recap
State Regulator. Advanced Control. design of controllers using pole placement and LQ design rules
 Advanced Control State Regulator Scope design of controllers using pole placement and LQ design rules Keywords pole placement, optimal control, LQ regulator, weighting matrixes Prerequisites Contact state
Advanced Control State Regulator Scope design of controllers using pole placement and LQ design rules Keywords pole placement, optimal control, LQ regulator, weighting matrixes Prerequisites Contact state
Douglas Russell, Student Member, IEEE, Andrew J. Fleming, Member, IEEE and Sumeet S. Aphale, Member, IEEE
 214 American Control Conference ACC) June 4-6, 214. Portland, Oregon, USA Simultaneous Optimization of Damping and Tracking Controller Parameters via Selective Pole Placement for Enhanced Positioning Bandwidth
214 American Control Conference ACC) June 4-6, 214. Portland, Oregon, USA Simultaneous Optimization of Damping and Tracking Controller Parameters via Selective Pole Placement for Enhanced Positioning Bandwidth
Stability of CL System
 Stability of CL System Consider an open loop stable system that becomes unstable with large gain: At the point of instability, K( j) G( j) = 1 0dB K( j) G( j) K( j) G( j) K( j) G( j) =± 180 o 180 o Closed
Stability of CL System Consider an open loop stable system that becomes unstable with large gain: At the point of instability, K( j) G( j) = 1 0dB K( j) G( j) K( j) G( j) K( j) G( j) =± 180 o 180 o Closed
IC6501 CONTROL SYSTEMS
 DHANALAKSHMI COLLEGE OF ENGINEERING CHENNAI DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING YEAR/SEMESTER: II/IV IC6501 CONTROL SYSTEMS UNIT I SYSTEMS AND THEIR REPRESENTATION 1. What is the mathematical
DHANALAKSHMI COLLEGE OF ENGINEERING CHENNAI DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING YEAR/SEMESTER: II/IV IC6501 CONTROL SYSTEMS UNIT I SYSTEMS AND THEIR REPRESENTATION 1. What is the mathematical
MATH4406 (Control Theory) Unit 1: Introduction Prepared by Yoni Nazarathy, July 21, 2012
 Unit 1: Introduction Prepared by Yoni Nazarathy, July 21, 2012") MATH4406 (Control Theory) Unit 1: Introduction Prepared by Yoni Nazarathy, July 21, 2012 Unit Outline Introduction to the course: Course goals, assessment, etc... What is Control Theory A bit of jargon,
MATH4406 (Control Theory) Unit 1: Introduction Prepared by Yoni Nazarathy, July 21, 2012 Unit Outline Introduction to the course: Course goals, assessment, etc... What is Control Theory A bit of jargon,
Control System Design
 ELEC ENG 4CL4: Control System Design Notes for Lecture #36 Dr. Ian C. Bruce Room: CRL-229 Phone ext.: 26984 Email: ibruce@mail.ece.mcmaster.ca Friday, April 4, 2003 3. Cascade Control Next we turn to an
ELEC ENG 4CL4: Control System Design Notes for Lecture #36 Dr. Ian C. Bruce Room: CRL-229 Phone ext.: 26984 Email: ibruce@mail.ece.mcmaster.ca Friday, April 4, 2003 3. Cascade Control Next we turn to an
DIGITAL CONTROL OF POWER CONVERTERS. 2 Digital controller design
 DIGITAL CONTROL OF POWER CONVERTERS 2 Digital controller design Outline Review of frequency domain control design Performance limitations Discrete time system analysis and modeling Digital controller design
DIGITAL CONTROL OF POWER CONVERTERS 2 Digital controller design Outline Review of frequency domain control design Performance limitations Discrete time system analysis and modeling Digital controller design
Presentation Topic 1: Feedback Control. Copyright 1998 DLMattern
 Presentation Topic 1: Feedback Control Outline Feedback Terminology Purpose of Feedback Limitations of Feedback Linear Control Design Techniques Nonlinear Control Design Techniques Rapid Prototyping Environments
Presentation Topic 1: Feedback Control Outline Feedback Terminology Purpose of Feedback Limitations of Feedback Linear Control Design Techniques Nonlinear Control Design Techniques Rapid Prototyping Environments
Scanning Force Microscopy
 Scanning Force Microscopy Roland Bennewitz Rutherford Physics Building 405 Phone 398-3058 roland.bennewitz@mcgill.ca Scanning Probe is moved along scan lines over a sample surface 1 Force Microscopy Data
Scanning Force Microscopy Roland Bennewitz Rutherford Physics Building 405 Phone 398-3058 roland.bennewitz@mcgill.ca Scanning Probe is moved along scan lines over a sample surface 1 Force Microscopy Data
Dr Ian R. Manchester
 Week Content Notes 1 Introduction 2 Frequency Domain Modelling 3 Transient Performance and the s-plane 4 Block Diagrams 5 Feedback System Characteristics Assign 1 Due 6 Root Locus 7 Root Locus 2 Assign
Week Content Notes 1 Introduction 2 Frequency Domain Modelling 3 Transient Performance and the s-plane 4 Block Diagrams 5 Feedback System Characteristics Assign 1 Due 6 Root Locus 7 Root Locus 2 Assign
State Feedback MAE 433 Spring 2012 Lab 7
 State Feedback MAE 433 Spring 1 Lab 7 Prof. C. Rowley and M. Littman AIs: Brandt Belson, onathan Tu Princeton University April 4-7, 1 1 Overview This lab addresses the control of an inverted pendulum balanced
State Feedback MAE 433 Spring 1 Lab 7 Prof. C. Rowley and M. Littman AIs: Brandt Belson, onathan Tu Princeton University April 4-7, 1 1 Overview This lab addresses the control of an inverted pendulum balanced
Lecture 9. Introduction to Kalman Filtering. Linear Quadratic Gaussian Control (LQG) G. Hovland 2004
 G. Hovland 2004") MER42 Advanced Control Lecture 9 Introduction to Kalman Filtering Linear Quadratic Gaussian Control (LQG) G. Hovland 24 Announcement No tutorials on hursday mornings 8-9am I will be present in all practical
MER42 Advanced Control Lecture 9 Introduction to Kalman Filtering Linear Quadratic Gaussian Control (LQG) G. Hovland 24 Announcement No tutorials on hursday mornings 8-9am I will be present in all practical
Research Article Iterative Learning Control of Hysteresis in Piezoelectric Actuators
 Mathematical Problems in Engineering, Article ID 85676, 6 pages http://dx.doi.org/1.1155/1/85676 Research Article Iterative Learning Control of Hysteresis in Piezoelectric Actuators Guilin Zhang, 1 Chengjin
Mathematical Problems in Engineering, Article ID 85676, 6 pages http://dx.doi.org/1.1155/1/85676 Research Article Iterative Learning Control of Hysteresis in Piezoelectric Actuators Guilin Zhang, 1 Chengjin
Dynamics and control of mechanical systems
 Dynamics and control of mechanical systems Date Day 1 (03/05) - 05/05 Day 2 (07/05) Day 3 (09/05) Day 4 (11/05) Day 5 (14/05) Day 6 (16/05) Content Review of the basics of mechanics. Kinematics of rigid
Dynamics and control of mechanical systems Date Day 1 (03/05) - 05/05 Day 2 (07/05) Day 3 (09/05) Day 4 (11/05) Day 5 (14/05) Day 6 (16/05) Content Review of the basics of mechanics. Kinematics of rigid
Australian Journal of Basic and Applied Sciences, 3(4): , 2009 ISSN Modern Control Design of Power System
: , 2009 ISSN Modern Control Design of Power System") Australian Journal of Basic and Applied Sciences, 3(4): 4267-4273, 29 ISSN 99-878 Modern Control Design of Power System Atef Saleh Othman Al-Mashakbeh Tafila Technical University, Electrical Engineering
Australian Journal of Basic and Applied Sciences, 3(4): 4267-4273, 29 ISSN 99-878 Modern Control Design of Power System Atef Saleh Othman Al-Mashakbeh Tafila Technical University, Electrical Engineering
Sistemas de Aquisição de Dados. Mestrado Integrado em Eng. Física Tecnológica 2016/17 Aula 3, 3rd September
 Sistemas de Aquisição de Dados Mestrado Integrado em Eng. Física Tecnológica 2016/17 Aula 3, 3rd September The Data Converter Interface Analog Media and Transducers Signal Conditioning Signal Conditioning
Sistemas de Aquisição de Dados Mestrado Integrado em Eng. Física Tecnológica 2016/17 Aula 3, 3rd September The Data Converter Interface Analog Media and Transducers Signal Conditioning Signal Conditioning
1 An Overview and Brief History of Feedback Control 1. 2 Dynamic Models 23. Contents. Preface. xiii
 Contents 1 An Overview and Brief History of Feedback Control 1 A Perspective on Feedback Control 1 Chapter Overview 2 1.1 A Simple Feedback System 3 1.2 A First Analysis of Feedback 6 1.3 Feedback System
Contents 1 An Overview and Brief History of Feedback Control 1 A Perspective on Feedback Control 1 Chapter Overview 2 1.1 A Simple Feedback System 3 1.2 A First Analysis of Feedback 6 1.3 Feedback System
Thermal deformation compensation of a composite beam using piezoelectric actuators
 INSTITUTE OF PHYSICS PUBLISHING Smart Mater. Struct. 13 (24) 3 37 SMART MATERIALS AND STRUCTURES PII: S964-1726(4)7973-8 Thermal deformation compensation of a composite beam using piezoelectric actuators
INSTITUTE OF PHYSICS PUBLISHING Smart Mater. Struct. 13 (24) 3 37 SMART MATERIALS AND STRUCTURES PII: S964-1726(4)7973-8 Thermal deformation compensation of a composite beam using piezoelectric actuators
Course Outline. Higher Order Poles: Example. Higher Order Poles. Amme 3500 : System Dynamics & Control. State Space Design. 1 G(s) = s(s + 2)(s +10)
 = s(s + 2)(s +10)") Amme 35 : System Dynamics Control State Space Design Course Outline Week Date Content Assignment Notes 1 1 Mar Introduction 2 8 Mar Frequency Domain Modelling 3 15 Mar Transient Performance and the s-plane
Amme 35 : System Dynamics Control State Space Design Course Outline Week Date Content Assignment Notes 1 1 Mar Introduction 2 8 Mar Frequency Domain Modelling 3 15 Mar Transient Performance and the s-plane
EE 4443/5329. LAB 3: Control of Industrial Systems. Simulation and Hardware Control (PID Design) The Torsion Disks. (ECP Systems-Model: 205)
 The Torsion Disks. (ECP Systems-Model: 205)") EE 4443/539 LAB 3: Control of Industrial Systems Simulation and Hardware Control (PID Design) The Torsion Disks (ECP Systems-Model: 05) Compiled by: Nitin Swamy Email: nswamy@lakeshore.uta.edu Email: okuljaca@lakeshore.uta.edu
EE 4443/539 LAB 3: Control of Industrial Systems Simulation and Hardware Control (PID Design) The Torsion Disks (ECP Systems-Model: 05) Compiled by: Nitin Swamy Email: nswamy@lakeshore.uta.edu Email: okuljaca@lakeshore.uta.edu
MOOC QP Set 2 Principles of Vibration Control
 Section I Section II Section III MOOC QP Set 2 Principles of Vibration Control (TOTAL = 100 marks) : 20 questions x 1 mark/question = 20 marks : 20 questions x 2 marks/question = 40 marks : 8 questions
Section I Section II Section III MOOC QP Set 2 Principles of Vibration Control (TOTAL = 100 marks) : 20 questions x 1 mark/question = 20 marks : 20 questions x 2 marks/question = 40 marks : 8 questions
«IBC AND BACKSTEPPING CONTROL OF AN ELECTRIC
 EMR 5 Lille June 205 Summer School EMR 5 Energetic Macroscopic Representation «IBC AND BACKSTEPPING CONTROL OF AN ELECTRIC VEHICLE» C. DEPATURE, Prof. A. BOUSCAYROL, Dr. W. LHOMME 2 Prof. L. BOULON, Prof.
EMR 5 Lille June 205 Summer School EMR 5 Energetic Macroscopic Representation «IBC AND BACKSTEPPING CONTROL OF AN ELECTRIC VEHICLE» C. DEPATURE, Prof. A. BOUSCAYROL, Dr. W. LHOMME 2 Prof. L. BOULON, Prof.
Automatique. A. Hably 1. Commande d un robot mobile. Automatique. A.Hably. Digital implementation
 A. Hably 1 1 Gipsa-lab, Grenoble-INP ahmad.hably@grenoble-inp.fr Commande d un robot mobile (Gipsa-lab (DA)) ASI 1 / 25 Outline 1 2 (Gipsa-lab (DA)) ASI 2 / 25 of controllers Signals must be sampled and
A. Hably 1 1 Gipsa-lab, Grenoble-INP ahmad.hably@grenoble-inp.fr Commande d un robot mobile (Gipsa-lab (DA)) ASI 1 / 25 Outline 1 2 (Gipsa-lab (DA)) ASI 2 / 25 of controllers Signals must be sampled and
ELEC4631 s Lecture 2: Dynamic Control Systems 7 March Overview of dynamic control systems
 ELEC4631 s Lecture 2: Dynamic Control Systems 7 March 2011 Overview of dynamic control systems Goals of Controller design Autonomous dynamic systems Linear Multi-input multi-output (MIMO) systems Bat flight
ELEC4631 s Lecture 2: Dynamic Control Systems 7 March 2011 Overview of dynamic control systems Goals of Controller design Autonomous dynamic systems Linear Multi-input multi-output (MIMO) systems Bat flight
B1-1. Closed-loop control. Chapter 1. Fundamentals of closed-loop control technology. Festo Didactic Process Control System
 B1-1 Chapter 1 Fundamentals of closed-loop control technology B1-2 This chapter outlines the differences between closed-loop and openloop control and gives an introduction to closed-loop control technology.
B1-1 Chapter 1 Fundamentals of closed-loop control technology B1-2 This chapter outlines the differences between closed-loop and openloop control and gives an introduction to closed-loop control technology.
Exam. 135 minutes, 15 minutes reading time
 Exam August 6, 208 Control Systems II (5-0590-00) Dr. Jacopo Tani Exam Exam Duration: 35 minutes, 5 minutes reading time Number of Problems: 35 Number of Points: 47 Permitted aids: 0 pages (5 sheets) A4.
Exam August 6, 208 Control Systems II (5-0590-00) Dr. Jacopo Tani Exam Exam Duration: 35 minutes, 5 minutes reading time Number of Problems: 35 Number of Points: 47 Permitted aids: 0 pages (5 sheets) A4.
Adaptive Robust Precision Control of Piezoelectric Positioning Stages
 Proceedings of the 5 IEEE/ASME International Conference on Advanced Intelligent Mechatronics Monterey, California, USA, 4-8 July, 5 MB3-3 Adaptive Robust Precision Control of Piezoelectric Positioning
Proceedings of the 5 IEEE/ASME International Conference on Advanced Intelligent Mechatronics Monterey, California, USA, 4-8 July, 5 MB3-3 Adaptive Robust Precision Control of Piezoelectric Positioning
D/A-Converters. Jian-Jia Chen (slides are based on Peter Marwedel) Informatik 12 TU Dortmund Germany
 Informatik 12 TU Dortmund Germany") 12 D/A-Converters Jian-Jia Chen (slides are based on Peter Marwedel) Informatik 12 Germany Springer, 2010 2014 年 11 月 12 日 These slides use Microsoft clip arts. Microsoft copyright restrictions apply.
12 D/A-Converters Jian-Jia Chen (slides are based on Peter Marwedel) Informatik 12 Germany Springer, 2010 2014 年 11 月 12 日 These slides use Microsoft clip arts. Microsoft copyright restrictions apply.
Operator-based Modeling for Nonlinear Ionic Polymer Metal Composite with Uncertainties
 SCIS & ISIS, Dec. 8-,, Okayama Convention Center, Okayama, Japan Operator-based Modeling for Nonlinear Ionic Polymer Metal Composite with Uncertainties Mingcong Deng a, Aihui Wang b, Mamoru Minami b, and
SCIS & ISIS, Dec. 8-,, Okayama Convention Center, Okayama, Japan Operator-based Modeling for Nonlinear Ionic Polymer Metal Composite with Uncertainties Mingcong Deng a, Aihui Wang b, Mamoru Minami b, and
EECS C128/ ME C134 Final Wed. Dec. 15, am. Closed book. Two pages of formula sheets. No calculators.
 Name: SID: EECS C28/ ME C34 Final Wed. Dec. 5, 2 8- am Closed book. Two pages of formula sheets. No calculators. There are 8 problems worth points total. Problem Points Score 2 2 6 3 4 4 5 6 6 7 8 2 Total
Name: SID: EECS C28/ ME C34 Final Wed. Dec. 5, 2 8- am Closed book. Two pages of formula sheets. No calculators. There are 8 problems worth points total. Problem Points Score 2 2 6 3 4 4 5 6 6 7 8 2 Total
FRICTION AND FRICTION COMPENSATION IN THE FURUTA PENDULUM
 FRICTION AND FRICTION COMPENSATION IN THE FURUTA PENDULUM M. Gäfvert, J. Svensson and K. J. Åström Department of Automatic Control Lund Institute of Technology, Box 8, S- Lund, Sweden Fax:+4646388,E-mail:{magnus,kja}@control.lth.se
FRICTION AND FRICTION COMPENSATION IN THE FURUTA PENDULUM M. Gäfvert, J. Svensson and K. J. Åström Department of Automatic Control Lund Institute of Technology, Box 8, S- Lund, Sweden Fax:+4646388,E-mail:{magnus,kja}@control.lth.se
Design of Nonlinear Control Systems with the Highest Derivative in Feedback
 SERIES ON STAB1UTY, VIBRATION AND CONTROL OF SYSTEMS SeriesA Volume 16 Founder & Editor: Ardeshir Guran Co-Editors: M. Cloud & W. B. Zimmerman Design of Nonlinear Control Systems with the Highest Derivative
SERIES ON STAB1UTY, VIBRATION AND CONTROL OF SYSTEMS SeriesA Volume 16 Founder & Editor: Ardeshir Guran Co-Editors: M. Cloud & W. B. Zimmerman Design of Nonlinear Control Systems with the Highest Derivative
Index. A Ang, W., 188 ARMAX, 217, 221 Atomic force microscopy (AFM), 2, 110, 111 Automated sperm immobilization system,
, 2, 110, 111 Automated sperm immobilization system,") Index A Ang, W., 188 ARMAX, 217, 221 Atomic force microscopy (AFM), 2, 110, 111 Automated sperm immobilization system, 260 261 B Berkovitz, A., 258 Bouc Wen model FF control, 208 hysteresis modeling and
Index A Ang, W., 188 ARMAX, 217, 221 Atomic force microscopy (AFM), 2, 110, 111 Automated sperm immobilization system, 260 261 B Berkovitz, A., 258 Bouc Wen model FF control, 208 hysteresis modeling and
CHAPTER 4 STATE FEEDBACK AND OUTPUT FEEDBACK CONTROLLERS
 54 CHAPTER 4 STATE FEEDBACK AND OUTPUT FEEDBACK CONTROLLERS 4.1 INTRODUCTION In control theory, a controller is a device which monitors and affects the operational conditions of a given dynamic system.
54 CHAPTER 4 STATE FEEDBACK AND OUTPUT FEEDBACK CONTROLLERS 4.1 INTRODUCTION In control theory, a controller is a device which monitors and affects the operational conditions of a given dynamic system.
ELEN E4810: Digital Signal Processing Topic 11: Continuous Signals. 1. Sampling and Reconstruction 2. Quantization
 ELEN E4810: Digital Signal Processing Topic 11: Continuous Signals 1. Sampling and Reconstruction 2. Quantization 1 1. Sampling & Reconstruction DSP must interact with an analog world: A to D D to A x(t)
ELEN E4810: Digital Signal Processing Topic 11: Continuous Signals 1. Sampling and Reconstruction 2. Quantization 1 1. Sampling & Reconstruction DSP must interact with an analog world: A to D D to A x(t)
Architectural Issues in Control System Design. Graham C. Goodwin. University of Newcastle, Australia
 Architectural Issues in Control System Design Graham C. Goodwin University of Newcastle, Australia Presented at the Nordic Process Control Workshop 26-27 August, 2010 Control has been an incredibly rewarding
Architectural Issues in Control System Design Graham C. Goodwin University of Newcastle, Australia Presented at the Nordic Process Control Workshop 26-27 August, 2010 Control has been an incredibly rewarding
ELECTRONICS & COMMUNICATIONS DEP. 3rd YEAR, 2010/2011 CONTROL ENGINEERING SHEET 5 Lead-Lag Compensation Techniques
 CAIRO UNIVERSITY FACULTY OF ENGINEERING ELECTRONICS & COMMUNICATIONS DEP. 3rd YEAR, 00/0 CONTROL ENGINEERING SHEET 5 Lead-Lag Compensation Techniques [] For the following system, Design a compensator such
CAIRO UNIVERSITY FACULTY OF ENGINEERING ELECTRONICS & COMMUNICATIONS DEP. 3rd YEAR, 00/0 CONTROL ENGINEERING SHEET 5 Lead-Lag Compensation Techniques [] For the following system, Design a compensator such
DEVELOPMENT OF A NOVEL ACTIVE ISOLATION CONCEPT 1
 DEVELOPMENT OF A NOVEL ACTIVE ISOLATION CONCEPT 1 Michiel J. Vervoordeldonk, Theo A.M. Ruijl, Rob M.G. Rijs Philips Centre for Industrial Technology, PO Box 518, 5600 MD Eindhoven, The Netherlands 2 1
DEVELOPMENT OF A NOVEL ACTIVE ISOLATION CONCEPT 1 Michiel J. Vervoordeldonk, Theo A.M. Ruijl, Rob M.G. Rijs Philips Centre for Industrial Technology, PO Box 518, 5600 MD Eindhoven, The Netherlands 2 1
ERROR SOURCE IDENTIFICATION AND STABILITY TEST OF A PRECISION CAPACITANCE MEASUREMENT SYSTEM
 106 SOUTH AFRICAN INSTITUTE OF ELECTRICAL ENGINEERS Vol.101(3) September 2010 ERROR SOURCE IDENTIFICATION AND STABILITY TEST OF A PRECISION CAPACITANCE MEASUREMENT SYSTEM S. Nihtianov* and X. Guo* # *
106 SOUTH AFRICAN INSTITUTE OF ELECTRICAL ENGINEERS Vol.101(3) September 2010 ERROR SOURCE IDENTIFICATION AND STABILITY TEST OF A PRECISION CAPACITANCE MEASUREMENT SYSTEM S. Nihtianov* and X. Guo* # *
SDL. Control of the UltraLITE Precision Deployable Test Article Using Adaptive Spatio-Temporal Filtering Based Control
 Control of the UltraLITE Precision Deployable Test Article Using Adaptive Spatio-Temporal Filtering Based Control Albert B. Bosse Thomas D. Sharp Stuart J. Shelley Sheet Dynamics, Ltd. Cincinnati, OH Keith
Control of the UltraLITE Precision Deployable Test Article Using Adaptive Spatio-Temporal Filtering Based Control Albert B. Bosse Thomas D. Sharp Stuart J. Shelley Sheet Dynamics, Ltd. Cincinnati, OH Keith
Estimation of Unsteady Loading for Sting Mounted Wind Tunnel Models
 52nd AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics and Materials Conference 19th 4-7 April 2011, Denver, Colorado AIAA 2011-1941 Estimation of Unsteady Loading for Sting Mounted Wind Tunnel
52nd AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics and Materials Conference 19th 4-7 April 2011, Denver, Colorado AIAA 2011-1941 Estimation of Unsteady Loading for Sting Mounted Wind Tunnel
Lecture 4 Scanning Probe Microscopy (SPM)
") Lecture 4 Scanning Probe Microscopy (SPM) General components of SPM; Tip --- the probe; Cantilever --- the indicator of the tip; Tip-sample interaction --- the feedback system; Scanner --- piezoelectric
Lecture 4 Scanning Probe Microscopy (SPM) General components of SPM; Tip --- the probe; Cantilever --- the indicator of the tip; Tip-sample interaction --- the feedback system; Scanner --- piezoelectric
Section 5 Dynamics and Control of DC-DC Converters
 Section 5 Dynamics and ontrol of D-D onverters 5.2. Recap on State-Space Theory x Ax Bu () (2) yxdu u v d ; y v x2 sx () s Ax() s Bu() s ignoring x (0) (3) ( si A) X( s) Bu( s) (4) X s si A BU s () ( )
Section 5 Dynamics and ontrol of D-D onverters 5.2. Recap on State-Space Theory x Ax Bu () (2) yxdu u v d ; y v x2 sx () s Ax() s Bu() s ignoring x (0) (3) ( si A) X( s) Bu( s) (4) X s si A BU s () ( )
Santosh Devasia Mechanical Eng. Dept., UW
 Nano-positioning Santosh Devasia Mechanical Eng. Dept., UW http://faculty.washington.edu/devasia/ Outline of Talk 1. Why Nano-positioning 2. Sensors for Nano-positioning 3. Actuators for Nano-positioning
Nano-positioning Santosh Devasia Mechanical Eng. Dept., UW http://faculty.washington.edu/devasia/ Outline of Talk 1. Why Nano-positioning 2. Sensors for Nano-positioning 3. Actuators for Nano-positioning
Electronic Circuits Summary
 Electronic Circuits Summary Andreas Biri, D-ITET 6.06.4 Constants (@300K) ε 0 = 8.854 0 F m m 0 = 9. 0 3 kg k =.38 0 3 J K = 8.67 0 5 ev/k kt q = 0.059 V, q kt = 38.6, kt = 5.9 mev V Small Signal Equivalent
Electronic Circuits Summary Andreas Biri, D-ITET 6.06.4 Constants (@300K) ε 0 = 8.854 0 F m m 0 = 9. 0 3 kg k =.38 0 3 J K = 8.67 0 5 ev/k kt q = 0.059 V, q kt = 38.6, kt = 5.9 mev V Small Signal Equivalent
Contents. PART I METHODS AND CONCEPTS 2. Transfer Function Approach Frequency Domain Representations... 42
 Contents Preface.............................................. xiii 1. Introduction......................................... 1 1.1 Continuous and Discrete Control Systems................. 4 1.2 Open-Loop
Contents Preface.............................................. xiii 1. Introduction......................................... 1 1.1 Continuous and Discrete Control Systems................. 4 1.2 Open-Loop
The output voltage is given by,
 71 The output voltage is given by, = (3.1) The inductor and capacitor values of the Boost converter are derived by having the same assumption as that of the Buck converter. Now the critical value of the
71 The output voltage is given by, = (3.1) The inductor and capacitor values of the Boost converter are derived by having the same assumption as that of the Buck converter. Now the critical value of the
Piezoelectric Actuator for Micro Robot Used in Nanosatellite
 Piezoelectric Actuator for Micro Robot Used in Nanosatellite R Bansevicius, S Navickaite, V Jurenas and A Bubulis PIEZOELECTRIC ACTUATOR FOR MICRO ROBOT USED IN NANOSATELLITE. R Bansevicius 1, S Navickaite,
Piezoelectric Actuator for Micro Robot Used in Nanosatellite R Bansevicius, S Navickaite, V Jurenas and A Bubulis PIEZOELECTRIC ACTUATOR FOR MICRO ROBOT USED IN NANOSATELLITE. R Bansevicius 1, S Navickaite,
Vibration Analysis and Control in Particle Accelerator
 Vibration Analysis and Control in Particle Accelerator M. Serluca 1, B. Aimard 1, G. Balik 1, B. Caron 2 L. Brunetti 1, A. Dominjon 1, A. Jeremie 1 (LAViSta Team: Laboratoires d Annecy de Vibration & Stabilisation)
Vibration Analysis and Control in Particle Accelerator M. Serluca 1, B. Aimard 1, G. Balik 1, B. Caron 2 L. Brunetti 1, A. Dominjon 1, A. Jeremie 1 (LAViSta Team: Laboratoires d Annecy de Vibration & Stabilisation)
PI-like Observer Structures in Digitally Controlled DC Servo Drives: Theory and Experiments
 30 ELECTRONICS, VOL. 15, NO. 1, JUNE 2011 PI-like Observer Structures in Digitally Controlled DC Servo Drives: Theory and Experiments Milica B. Naumović Abstract This paper deals with the problem of the
30 ELECTRONICS, VOL. 15, NO. 1, JUNE 2011 PI-like Observer Structures in Digitally Controlled DC Servo Drives: Theory and Experiments Milica B. Naumović Abstract This paper deals with the problem of the
Towards Automatic Nanomanipulation at the Atomic Scale
 Towards Automatic Nanomanipulation at the Atomic Scale Bernd Schütz Department of Computer Science University of Hamburg, Germany Department of Computer Science Outline Introduction System Overview Workpackages
Towards Automatic Nanomanipulation at the Atomic Scale Bernd Schütz Department of Computer Science University of Hamburg, Germany Department of Computer Science Outline Introduction System Overview Workpackages
QFT Framework for Robust Tuning of Power System Stabilizers
 45-E-PSS-75 QFT Framework for Robust Tuning of Power System Stabilizers Seyyed Mohammad Mahdi Alavi, Roozbeh Izadi-Zamanabadi Department of Control Engineering, Aalborg University, Denmark Correspondence
45-E-PSS-75 QFT Framework for Robust Tuning of Power System Stabilizers Seyyed Mohammad Mahdi Alavi, Roozbeh Izadi-Zamanabadi Department of Control Engineering, Aalborg University, Denmark Correspondence
Technical Report PZT-Silicon Cantilever Benders
 Radiant Technologies, Inc. 2021 Girard SE Albuquerque, NM 876 Tel: 505-842-8007 Fax: 505-842-0366 Technical Report PZT-Silicon Cantilever Benders Subject: Displacement Measurements of Silicon Cantilevers
Radiant Technologies, Inc. 2021 Girard SE Albuquerque, NM 876 Tel: 505-842-8007 Fax: 505-842-0366 Technical Report PZT-Silicon Cantilever Benders Subject: Displacement Measurements of Silicon Cantilevers
IMECE IMECE ADAPTIVE ROBUST REPETITIVE CONTROL OF PIEZOELECTRIC ACTUATORS
 Proceedings Proceedings of IMECE5 of 5 5 ASME 5 ASME International International Mechanical Mechanical Engineering Engineering Congress Congress and Exposition and Exposition November November 5-, 5-,
Proceedings Proceedings of IMECE5 of 5 5 ASME 5 ASME International International Mechanical Mechanical Engineering Engineering Congress Congress and Exposition and Exposition November November 5-, 5-,
Acknowledgements. Control Design for a MEMS Accelerometer with Tunneling Sensing. Outline. Introduction. Force Feedback. Outline
 Acknoledgements Control Design for a MEMS Accelerometer ith Tunneling Sensing K. J. Åström Department of Automatic Control LTH, Lund University Kimberly Turner Group at UCSB (ME) Laura Oropeza-Ramos, Chris
Acknoledgements Control Design for a MEMS Accelerometer ith Tunneling Sensing K. J. Åström Department of Automatic Control LTH, Lund University Kimberly Turner Group at UCSB (ME) Laura Oropeza-Ramos, Chris
Control of the Keck and CELT Telescopes. Douglas G. MacMartin Control & Dynamical Systems California Institute of Technology
 Control of the Keck and CELT Telescopes Douglas G. MacMartin Control & Dynamical Systems California Institute of Technology Telescope Control Problems Light from star Primary mirror active control system
Control of the Keck and CELT Telescopes Douglas G. MacMartin Control & Dynamical Systems California Institute of Technology Telescope Control Problems Light from star Primary mirror active control system
Fall 線性系統 Linear Systems. Chapter 08 State Feedback & State Estimators (SISO) Feng-Li Lian. NTU-EE Sep07 Jan08
 Feng-Li Lian. NTU-EE Sep07 Jan08") Fall 2007 線性系統 Linear Systems Chapter 08 State Feedback & State Estimators (SISO) Feng-Li Lian NTU-EE Sep07 Jan08 Materials used in these lecture notes are adopted from Linear System Theory & Design, 3rd.
Fall 2007 線性系統 Linear Systems Chapter 08 State Feedback & State Estimators (SISO) Feng-Li Lian NTU-EE Sep07 Jan08 Materials used in these lecture notes are adopted from Linear System Theory & Design, 3rd.
Experiment # 5 5. Coupled Water Tanks
 Experiment # 5 5. Coupled Water Tanks 5.. Objectives The Coupled-Tank plant is a Two-Tank module consisting of a pump with a water basin and two tanks. The two tanks are mounted on the front plate such
Experiment # 5 5. Coupled Water Tanks 5.. Objectives The Coupled-Tank plant is a Two-Tank module consisting of a pump with a water basin and two tanks. The two tanks are mounted on the front plate such
BIASED PZT MATERIALS FOR ACOUSTIC TRANSDUCERS
 Proceedings of ICONS 22. International Conference on Sonar Sensors and Systems. BIASED PZT MATERIALS FOR ACOUSTIC TRANSDUCERS D.F. Waechter, S.E. Prasad and R. Blacow Sensor Technology Limited, Collingwood,
Proceedings of ICONS 22. International Conference on Sonar Sensors and Systems. BIASED PZT MATERIALS FOR ACOUSTIC TRANSDUCERS D.F. Waechter, S.E. Prasad and R. Blacow Sensor Technology Limited, Collingwood,
EE 474 Lab Part 2: Open-Loop and Closed-Loop Control (Velocity Servo)
") Contents EE 474 Lab Part 2: Open-Loop and Closed-Loop Control (Velocity Servo) 1 Introduction 1 1.1 Discovery learning in the Controls Teaching Laboratory.............. 1 1.2 A Laboratory Notebook...............................
Contents EE 474 Lab Part 2: Open-Loop and Closed-Loop Control (Velocity Servo) 1 Introduction 1 1.1 Discovery learning in the Controls Teaching Laboratory.............. 1 1.2 A Laboratory Notebook...............................
Overview of the Seminar Topic
 Overview of the Seminar Topic Simo Särkkä Laboratory of Computational Engineering Helsinki University of Technology September 17, 2007 Contents 1 What is Control Theory? 2 History
Overview of the Seminar Topic Simo Särkkä Laboratory of Computational Engineering Helsinki University of Technology September 17, 2007 Contents 1 What is Control Theory? 2 History