Coordinate Systems for Hexapod Microrobots
|
|
|
- Victor Page
- 5 years ago
- Views:
Transcription
1 Technical Nte Br, Crdinate Systems fr Hexapd Micrrbts When wrking with a Hexapd micrrbt ("Hexapd"), it may be necessary fr certain applicatins t define custm crdinate systems and use these instead f default crdinate systems. This Technical Nte describes the fundamental principles fr wrking with user-defined crdinate systems and the cmmands prvided fr this purpse. Other applicable dcuments: Manual fr the C-887 Hexapd cntrller, manual fr the used H-xxx Hexapd micrrbt Cntents Overview f Wrking with User-Defined Crdinate Systems... 2 Grups and Types f Crdinate Systems, HEXAPOD Crdinate System... 2 The Wrk-and-Tl Cncept... 3 Applying the Wrk-and-Tl Cncept... 3 Cnsideratin f Crdinate Systems f the KSD and KSF Type frm the "Wrk" and "Tl" Perspective... 4 Defining, Cpying and Deleting Crdinate Systems... 5 Linking Crdinate Systems... 5 Enabling/Disabling Crdinate Systems... 6 Backing Up and Restring Settings... 7 Cmmanding Mtin... 7 PC Sftware frm PI... 8 Examples f User-Defined Crdinate Systems... 9 Optics: The Optical Axis is t be the Z Axis... 9 Optics: Scanning in an Inclined Plane User-Defined "Hme" Psitin Applying the Wrk-and-Tl Cncept GCS Cmmands Cmmand Overview Naming Cnventins fr Crdinate Systems Cmmand Descriptins... 13
2 Page 2 / 41 Overview f Wrking with User-Defined Crdinate Systems Basic steps: 1. Define a crdinate system suitable fr the applicatin cncerned 2. Optinal: Link the defined crdinate system t ther existing crdinate systems s that their prperties are inherited by the new crdinate systems 3. Enable the defined crdinate system s that its prperties becme effective fr the wrk with the Hexapd 4. Optinal: Save the definitin and the activatin state f the crdinate system s that they are retained when the Hexapd cntrller is switched ff r rebted 5. Cmmand mtin If necessary, the default settings fr crdinate systems can be restred. Grups and Types f Crdinate Systems, HEXAPOD Crdinate System The varius crdinate system types can be divided int grups. Precisely ne crdinate system r precisely ne crdinate system cmbinatin is enabled fr each grup. The types and crdinate systems which cannt be defined by the user appear in the table belw in bld. Grup Types Purpse Default Settings* Operating crdinate system Orientatinal crdinate system Leveling crdinate system ZERO, KSD, KSF When applying the wrk-and-tl cncept (p. 3): KSW ("wrk" crdinate system), KST ("tl" crdinate system) In this case, a cmbinatin f enabled wrk and enabled tl crdinate system is used; fr mre details, see p. 3 KSB(PI), KSB(USER) KLD(PI), KLF(PI), KLD(USER), KLF(USER) Adapting the psitin display, the directin f mtin and the center f rtatin fr the mving platfrm f the Hexapd t the applicatin cncerned Permanent mdificatin t the directin f the X and/r Y and/r Z axes (e.g., if Z always has t pint twards the default X axis) Permanent crrectin f errrs in the Hexapd alignment (e.g., due t faulty munting) ZERO crdinate system f the ZERO type is enabled PI_Base crdinate system f the KSB(PI) type is enabled PI_Levelling crdinate system f the KLD(PI) type is enabled *Default settings are defined by PI and can be restred at any time, see Backing Up and Restring Settings (p. 7).
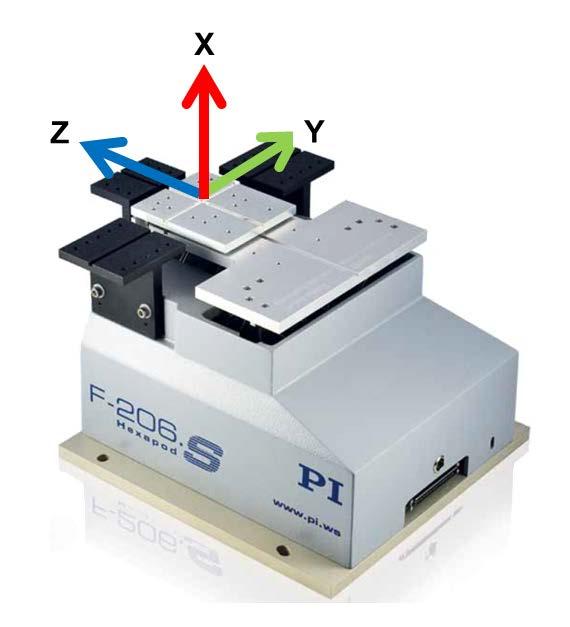
3 Page 3 / 41 Each crdinate system is part f at least ne chain. Basic structure f chains: Operating crdinate system Successr Orientatinal crdinate system Leveling crdinate system HEXAPOD crdinate system (based n the cnfiguratin file with the gemetry data fr the Hexapd) Predecessr The HEXAPOD crdinate system, which des nt belng t any f the afrementined grups, is the starting pint fr all crdinate system chains and as such dictates the fundamental prperties f all crdinate systems. HEXAPOD is based n the cnfiguratin file with the gemetry data fr the Hexapd. The dimensinal drawings in the manuals fr the H-xxx Hexapd micrrbts each shw the psitin f the HEXAPOD crdinate system. The prperties f crdinate system and pivt pint described in the manuals fr the H-xxx Hexapd micrrbts, and the behavir fr translatins and rtatins which is described there crrespnds t the prperties and the behavir when the ZERO perating crdinate system is enabled (default setting). Based n HEXAPOD, the rientatinal and leveling crdinate systems adapt fundamental prperties f the enabled perating crdinate system, and in mst applicatins their custm definitin and enabling is nt necessary at all r nly nce. Default and user-defined crdinate systems are always right-handed systems. It is nt pssible t cnvert a right-handed system t a left-handed system. The Wrk-and-Tl Cncept Applying the Wrk-and-Tl Cncept The wrk-and-tl cncept uses a cmbinatin f tw enabled perating crdinate systems ("wrk" crdinate system and "tl" crdinate system). Generally, the cmbinatin cnsists f ne enabled crdinate system f the KST (tl crdinate system) type and ne f the KSW (wrk crdinate system) type. The wrk-and-tl cncept is applied when a crdinate system f the KST and/r KSW type is enabled. The current psitin f the mving platfrm f the Hexapd is then cnsidered the psitin f the tl crdinate system in the wrk crdinate system (query with the POS? cmmand, see the manual f the Hexapd cntrller). Wrk crdinate systems f the KSW type and tl crdinate systems f the KST type can be placed and aligned in space arbitrarily. The X, Y, and Z axes f the tl crdinate system are always permanently cnnected t the mving platfrm f the Hexapd, i.e., the tl crdinate system mves tgether with the platfrm. The X, Y, and Z axes f the wrk crdinate system are always spatially-fixed, i.e., the wrk crdinate system des nt mve when the platfrm f the Hexapd mves. The center f rtatin always lies at the rigin f the tl crdinate system and it therefre mves just as the tl crdinate system with the platfrm. A cmbinatin f wrk and tl crdinate systems is created in the vlatile memry when a crdinate system f the KST r KSW type is enabled. The cmbinatins remain in the vlatile memry even if the crdinate
4 Page 4 / 41 systems f the KST r KSW type cntained therein are n lnger enabled, but are still present. The wrk-and-tl cncept is applied even when nly a crdinate system f the KST r the KSW type is enabled, i.e., a crdinate system f the ther type is nt enabled. An autmatically generated substitute is used fr the missing type. The placement and alignment f the axes f the crdinate system which is generated and used as a substitute, crrespnd t the nes f the ZERO perating crdinate system (ffset values fr the psitin f the axes X = Y = Z = U = V = W = 0). When the prperties f crdinate system cmbinatins are queried using the KLC? cmmand (p. 17), the crdinate systems generated and used as a substitute are therefre cntained in the respnse under the name "Zer". Cnsideratin f Crdinate Systems f the KSD and KSF Type frm the "Wrk" and "Tl" Perspective The user-defined crdinate systems f the KSD (p. 30) and KSF (p. 32) types can be best understd if we imagine that a wrk crdinate system and a tl crdinate system is always present, even if the wrk-and-tl cncept is nt applied. Here t, the current psitin f the mving platfrm f the Hexapd has t be cnsidered the psitin f the tl crdinate system in the wrk crdinate system. The default settings are cnsidered frm this perspective first: In the default settings, i.e., when the ZERO perating crdinate system is enabled, bth the wrk and tl crdinate systems are cngruent with ZERO, if the platfrm f the Hexapd has the current psitin X = Y = Z = U = V = W = 0. During mtin, the tl crdinate system mves with the platfrm f the Hexapd whereas the wrk crdinate system is spatially-fixed and remains cngruent with ZERO. Cnsideratin f perating crdinate systems f the KSD and KSF types frm the "wrk" and "tl" perspective: When an perating crdinate system f the KSD type is defined, the wrk and the tl crdinate systems are simultaneusly psitined and aligned in space accrding t the ffset values given. After enabling an perating crdinate system f the KSD type, the wrk and the tl crdinate systems are cngruent exactly when the mving platfrm f the Hexapd is psitined at X = Y = Z = U = V = W = 0. During mtin, the tl crdinate system mves with the platfrm f the Hexapd as usual whereas the wrk crdinate system remains spatially-fixed in the psitin and alignment defined by KSD. When an perating crdinate system f the KSF type is defined, the wrk crdinate system is placed and aligned in space s as t be cngruent with the tl crdinate system which is currently placed and aligned in space accrding t the previus mtins f the platfrm f the Hexapd. After enabling an perating crdinate system f the KSF type, the current psitin f the platfrm f the Hexapd is thus displayed as X = Y = Z = U = V = W = 0, prvided that n mtins have been cmmanded between the definitin f the crdinate system and its enabling. During mtin, the tl crdinate system mves with the platfrm f the Hexapd as usual, whereas the wrk crdinate system remains spatially-fixed in the psitin and alignment defined by KSF. In principle, the center f rtatin here als lies at the rigin f the tl crdinate system. When the enabled perating crdinate system is the ZERO crdinate system r a crdinate system f the KSF type, the center f rtatin can additinally be mved frm the rigin f the tl crdinate system in X and/r Y and/r Z directin with the SPI cmmand (the center f rtatin that can be mved using SPI is als referred t as "pivt pint"). Changing the crdinates f the center f rtatin using SPI is nly pssible if the current psitin f the platfrm is U = V = W = 0. Since the center f rtatin either lies directly at the rigin f the tl crdinate system r it is mved using SPI with fixed ffset values frm the rigin, it always mves with the platfrm just as the tl crdinate system.
5 Page 5 / 41 Defining, Cpying and Deleting Crdinate Systems Crdinate systems can be defined in the vlatile memry using the fllwing cmmands: Crdinate System Type Cmmand Descriptin, see KSD KSD p. 30 KSF KSF p. 32 KST KST p. 33 KSW KSW p. 35 KSB(USER) KSB p. 29 KLD(USER) KLD p. 20 KLF(USER) KLF p. 22 A cpy f a crdinate system can be generated in the vlatile memry using the KCP cmmand (p. 14). A crdinate system that is nt enabled r is nt linked t the enabled crdinate system as a predecessr can be deleted frm the vlatile memry using the KRM cmmand (p. 28). When deleting a crdinate system, its direct predecessr and its successr are linked t ne anther. Using the KLS? cmmand (p. 25), the prperties f the crdinate systems in the vlatile memry can be queried. Linking Crdinate Systems Crdinate systems can be linked t ne anther using the KLN cmmand (p. 23). Details n the structure f chains and the applicability f KLN: The HEXAPOD crdinate system is always based n the cnfiguratin file with the gemetry data fr the Hexapd and it is the starting pint fr all crdinate system chains. The PI_Levelling leveling crdinate system is always the successr t HEXAPOD. By default, the successr t the PI_Levelling leveling crdinate system is the PI_Base rientatinal crdinate system. PI_Levelling is autmatically set as predecessr, when a leveling crdinate system f the KLD(USER) r KLF(USER) type is defined. When a leveling crdinate system f the KLD(USER) r KLF(USER) type is enabled, PI_Base is autmatically linked t this crdinate system as a successr, and n lnger directly t PI_Levelling. By default, the successr t the PI_Base rientatinal crdinate system is the ZERO perating crdinate system. When an rientatinal crdinate system f the KSB(USER) type is defined, it autmatically has the enabled rientatinal crdinate system as its predecessr (by default this is PI_Base). Multiple rientatinal crdinate systems f the KSB(USER) type can be linked t ne anther using KLN, whereby PI_Base always remains the predecessr f the respective chain. When an rientatinal crdinate system f the KSB(USER) type is enabled, ZERO is autmatically linked t this crdinate system as successr. When an perating crdinate system f the KSD, KSF, KST r KSW type is defined fr the first time, the predecessr is autmatically the ZERO crdinate system. Multiple perating crdinate systems f the KSD, KSF, KST r KSW type can be linked t ne anther using KLN, whereby ZERO always
6 Page 6 / 41 remains the predecessr f the respective chain. A crdinate system cannt be linked t itself. Althugh ring cnnectins f at least tw crdinate systems can be frmed, they cannt be enabled using KEN (p. 14). Enabling/Disabling Crdinate Systems Precisely ne crdinate system r precisely ne crdinate system cmbinatin is enabled frm the grups described in "Grups and Types f Crdinate Systems" (p. 2). Only the prperties f enabled crdinate systems are effective fr the wrk with the Hexapd. Enabled crdinate systems cannt be changed r deleted. If a crdinate system is linked as predecessr t the enabled crdinate system, it is nt enabled itself, hwever, it cannt be changed r deleted. In this Technical Nte, enabled crdinate systems and crdinate systems that are predecessrs f the enabled crdinate system are als referred t as "crdinate systems used". Enabled crdinate systems can be queried using the KEN? (p. 16) and the KET? (p. 16) cmmands. The respnse t the KLS? cmmand (p. 25) als lists, alng with the prperties f the crdinate systems, whether the crdinate systems are currently in use, i.e., whether they are enabled r are predecessrs f the enabled crdinate system (value "Used = """). The chain f the predecessrs f the enabled crdinate system cannt be changed. The KEN cmmand (p. 14) can be used t enable crdinate systems f the fllwing types: KSD, KSF, KSW, KST, KSB(USER), KSB(PI), KLF(USER), KLF(PI), KLD(USER), KLD(PI), ZERO When using KEN t enable crdinate systems, a mtin is nt initiated, but the display fr the current psitin f the mving platfrm f the Hexapd is changed. When a KST r KSW type crdinate system is enabled, a cmbinatin f wrk and tl crdinate systems is created in the vlatile memry. The text belw therefre als refers t "enabling a crdinate system cmbinatin". Using the KLC? cmmand (p. 17), the prperties f the crdinate system cmbinatins in the vlatile memry can be queried. By enabling a crdinate system fr ne f the crdinate system grups (perating, rientatinal, r leveling crdinate systems), the crdinate system r the crdinate system cmbinatin that was previusly enabled fr this grup is simultaneusly disabled. Sending KEN ZERO re-enables the ZERO perating crdinate system that is enabled by default. When the cmmand level 1 is active (see descriptin f the CCL cmmand in the manual fr the Hexapd cntrller), KEN ZERO als re-enables the PI_Levelling leveling crdinate system which was enabled by default, but nt the PI_Base rientatinal crdinate system which was enabled by default (this can be re-enabled by sending KEN PI_Base). By sending DPA SKS (p. 13), all crdinate systems enabled by default can be re-enabled independently f the currently active cmmand level. Depending n the crdinate system type, when a crdinate system r a crdinate system cmbinatin is enabled, further settings, besides the nes f the ffset values fr the psitins f the X, Y, Z, U, V, W axes, becme effective: Fr the ZERO and KSF types: SPI: pivt pint crdinates R, S, T Fr the ZERO, KSD and KSF types and als fr crdinate system cmbinatins f the KSW/KST r ZERO/KST r KSW/ZERO types: NLM: Limit fr the lw end f the axis travel range ( sft limit ) PLM: Limit fr the high end f the axis travel range ( sft limit )
7 Page 7 / 41 SSL: Activatin state f the sft limits f the axis SST: Step size fr mtins initiated by a manual cntrl unit The settings fr the enabled crdinate system can be changed using the crrespnding cmmands (SPI, NLM, PLM, SSL, SST; see the manual fr the Hexapd cntrller). Backing Up and Restring Settings Crdinate systems and crdinate system cmbinatins are always defined, enabled, cpied, linked, r deleted in the vlatile memry f the Hexapd cntrller. Unless backed up, the current settings are lst when the Hexapd cntrller is switched ff r rebted. T perfrm the backup, the currently valid settings fr crdinate systems can be written t the nnvlatile memry f the Hexapd cntrller using the WPA cmmand (p. 40). The settings saved using WPA are autmatically laded frm the nnvlatile memry t the vlatile memry when the Hexapd cntrller is switched n r rebted. Saving using WPA des nt verwrite the default settings. The default settings can be restred using the DPA cmmand (p. 13) r by sending KEN ZERO, see als "Enabling/Disabling Crdinate Systems" (p. 6). Cmmanding Mtin Mtins f the platfrm f the Hexapd can always be cnsidered mtins f the tl crdinate system in the wrk crdinate system, see als "Cnsideratin f Crdinate Systems f the KSD and KSF Type frm the "Wrk" and "Tl" Perspective" (p. 4). The alignment and placement f the wrk and tl crdinate system depends n the enabled perating crdinate system r the crdinate system cmbinatin. Abslute mtins f the platfrm f the Hexapd, which are cmmanded using MOV (fr a descriptin, see the manual fr the Hexapd cntrller), are therefre als always regarded as abslute mtins f the tl crdinate system in the wrk crdinate system. Using MVR (fr a descriptin, see the manual f the Hexapd cntrller) crrespnding relative mtins can be cmmanded. Relative mtins f the platfrm f the Hexapd in the tl crdinate system can always be cmmanded using MRT (p. 37). Relative mtins f the platfrm f the Hexapd in the wrk crdinate system can always be cmmanded using MRW (p. 38). The pivt pint defined using the SPI cmmand (fr a descriptin, see the manual fr the Hexapd cntrller), can be used fr rtatins r can be changed nly if the ZERO crdinate system r a crdinate system f the KSF type is enabled as the perating crdinate system. By using the TRA? cmmand (p. 39), yu can query the maximum abslute psitin that wuld be cmmandable if the platfrm f the Hexapd were t mve alng a given directin vectr. The current psitin f the platfrm f the Hexapd and hence the psitin f the tl crdinate system in the wrk crdinate system can be queried using the POS? cmmand (fr a descriptin, see the manual fr the Hexapd cntrller).
8 Page 8 / 41 PC Sftware frm PI The PC sftware frm PI (incl. PIMikrMve, PI GCS 2 Dynamic Library, GCS LabVIEW driver set, Hexapd Simulatin Sftware simulatin prgram) has been mdified fr wrking with user-defined crdinate systems. The mdificatins in PIMikrMve cncern primarily the Hexapd Platfrm windw and the Hexapd 3D View tab card. In additin, the Shw Hexapd Simulatin Tl menu item is available which launches the Hexapd Simulatin Sftware simulatin prgram. The settings made in the Hexapd Simulatin Sftware simulatin prgram can be sent t the Hexapd cntrller using PIMikrMve.


9 Page 9 / 41 Examples f User-Defined Crdinate Systems Optics: The Optical Axis is t be the Z Axis



10 Page 10 / 41 Optics: Scanning in an Inclined Plane User-Defined "Hme" Psitin The platfrm was mved using MOV t the new psitin befre sending KSF.

11 Page 11 / 41 Applying the Wrk-and-Tl Cncept Carried tl interacts with spatially-fixed wrkpiece, e.g., during milling, gluing r cutting Wrk crdinate system and tl crdinate system are defined and enabled. The mtin using MRT advances the tl. The mtin using MRW ccurs alng the wrkpiece in rder t machine the wrkpiece. GCS Cmmands The cmmands described belw were intrduced fr wrking with user-defined crdinate systems. The cmmands make it pssible, amng ther things, t define, enable, link and save crdinate systems. The cmmands described in this Technical Nte cmplement the PI General Cmmand Set (PI GCS) which is described in the manual fr the C-887 Hexapd cntrller. The manual fr the Hexapd cntrller als cntains basic infrmatin n the syntax used in the cmmand descriptins and n the PI GCS syntax.
12 Page 12 / 41 Cmmand Overview Cmmand Frmat Descriptin DPA (p. 13) DPA <Pswd> [{<ItemID> <PamID>}] Reset Vlatile Memry Settings T Default KCP (p. 14) KCP <CSNameSurce> <CSNameCpy> Cpy Crdinate System KEN (p. 14) KEN <CSName> Enable Crdinate System KEN? (p. 16) KEN? [{<CSName>}] Get Enabled Crdinate Systems KET? (p. 16) KET? [{<CSType>}] Get Enabled Crdinate System Types KLC? (p. 17) KLC? [<CSName1>[<CSName2>[<Item1>[<Item2>]]]] Get Prperties Of Wrk-And-Tl Cmbinatins KLD (p. 20) KLD <CSName> [{<AxisID> <Offset>}] Define Leveling Crdinate System By Specifying Values KLF (p. 22) KLF <CSName> Define Leveling Crdinate System At Current Psitin KLN (p. 23) KLN <CSName1> <CSName2> Link Crdinate Systems KLN? (p. 25) KLN? [{<CSName>}] Get Crdinate System Chains KLS? (p. 25) KLS? [<CSName>[<Item1>[<Item2>]]] Get Crdinate System Prperties KLT? (p. 27) KLT? [<StartCS> [<EndCS>]] Get Offsets Resulting Frm A Chain KRM (p. 28) KRM <CSName> Remve Crdinate System KSB (p. 29) KSB <CSName> [{<AxisID> <Angle>}] Define Orientatinal Crdinate System KSD (p. 30) KSD <CSName> [{<AxisID> <Offset>}] Define Operating Crdinate System By Specifying Values KSF (p. 32) KSF <CSName> Define Operating Crdinate System At Current Psitin KST (p. 33) KST <CSName> [{<AxisID> <Offset>}] Define Tl Operating Crdinate System KSW (p. 35) KSW <CSName> [{<AxisID> <Offset>}] Define Wrk Operating Crdinate System MRT (p. 37) MRT {<AxisID> <Distance>} Set Target Relative In Tl Crdinate System MRW (p. 38) MRW {<AxisID> <Distance>} Set Target Relative In Wrk Crdinate System TRA? (p. 39) TRA? {<AxisID> <Cmpnent>} Get Maximum Cmmandable Psitin Fr Directin Vectr WPA (p. 40) WPA <Pswd> [{<ItemID> <PamID>}] Save Settings T Nn-Vlatile Memry
13 Page 13 / 41 Naming Cnventins fr Crdinate Systems Permissible characters: ABCDEFGHIJKLMNOPQRSTUVWXYZ_ The number f characters is unlimited. The name must start with an alphabetic character. Reserved names which must nt be used fr defining, cpying r deleting: HEXAPOD, PI_LEVELLING, PI_BASE, ZERO, 0, NULL, XML, KLF, KLF(USER), KLF(PI), KLD, KLD(USER), KLD(PI), KSB, KSB(USER), KSB(PI), KSD, KSF, KST, KSW Each name can exist nly nce. Any existing crdinate system nt in use will be verwritten when a crdinate system with the same name is created (defining, generating a cpy). Fr details, see KLD (p. 20), KLF (p. 22), KSB (p. 29), KSD (p. 30), KSF (p. 32), KST (p. 33) and KSW (p. 35). Cmmand Descriptins DPA (Reset Vlatile Memry Settings T Default) Descriptin: Frmat: Arguments: Trubleshting: Ntes: Restres the defaults settings fr parameters and parameter-independent settings in the vlatile memry. DPA <Pswd> [{<ItemID> <PamID>}] <Pswd> is the passwrd fr resetting the vlatile memry. See belw fr details. <ItemID> is the item fr which a parameter is t be reset. See belw fr details. <PamID> is the parameter ID, it can be written in hexadecimal r decimal frmat. See belw fr details. Nne Invalid item identifier, wrng parameter ID With the C-887, DPA can be used nly t restre the default parameter-independent settings fr crdinate systems. Valid passwrd: SKS When using the SKS passwrd, <ItemID> and <PamID> are nt needed. Default settings which are restred using DPA SKS: Orientatinal crdinate system (KSB() type): PI_BASE is enabled Leveling crdinate system (KLD() r KLF() type): PI_Levelling is enabled ZERO perating crdinate system is enabled and based n PI_BASE and PI_Levelling Pivt pint (see SPI), sft limits f axes (see NLM, PLM and SSL), step size fr mtins initiated by a manual cntrl unit (see SST) The default settings laded using DPA are independent f the settings in the nnvlatile memry, which can be verwritten using WPA (p. 40). The settings in the nnvlatile memry (saved using WPA) are autmatically laded t the vlatile memry when the C-887 is switched n r rebted.
14 Page 14 / 41 KCP (Cpy Crdinate System) Descriptin: Frmat: Arguments: Ntes: Generates a cpy f a crdinate system. KCP <CSNameSurce> <CSNameCpy> <CSNameSurce> is the name f the crdinate system f which a cpy is t be generated. PI_Base, PI_Levelling, ZERO and HEXAPOD cannt be cpied. <CSNameCpy> is the name f the cpy f the crdinate system. Nne PI_Base, PI_Levelling, ZERO and HEXAPOD cannt be cpied. Optins fr creating the cpy: <CSNameCpy> is a new name. The cpy is created as a new crdinate system with this name. <CSNameCpy> is the name f an existing crdinate system that is nt in use. This verwrites the crdinate system. The linking t the predecessr in a chain f crdinate systems is cpied. The linking t successrs is nt cpied. The cpy is generated in the vlatile memry. Using WPA, the cpy can be written t the nnvlatile memry. KEN (Enable Crdinate System) Descriptin: Enables the given crdinate system. The scpe f the settings that are influenced by enabling depends n the crdinate system type, see belw. Psitin values fr the mving platfrm f the Hexapd (query using POS?) refer t the enabled perating crdinate system. When applying the wrk-and-tl cncept: The wrk-and-tl cncept uses a cmbinatin f tw enabled perating crdinate systems. Generally, the cmbinatin cnsists f ne active crdinate system f the KST type and ne f the KSW type. If a crdinate system is enabled fr nly ne f the tw types, a substitute is autmatically used fr the ther type, fr details see p. 3. The current psitin f the mving platfrm f the Hexapd queried using POS? can be cnsidered the psitin f the tl crdinate system in the wrk crdinate system.
15 Page 15 / 41 Enabling crdinate systems using KEN des nt initiate a mtin. Frmat: Arguments: Ntes: KEN <CSName> <CSName> is the name f the crdinate system t be enabled. Nne Befre enabling a crdinate system, KEN checks that the definitin f this crdinate system and its linking are crrect (fr details, see p. 5). If the crdinate system is nt crrectly defined, it is nt enabled. KEN can be used t enable crdinate systems f the fllwing types: KSD, KSF, KSW, KST, KSB(USER), KSB(PI), KLF(USER), KLF(PI), KLD(USER), KLD(PI), ZERO Precisely ne crdinate system r precisely ne crdinate system cmbinatin is enabled frm the fllwing grups f crdinate systems: Operating crdinate system: A crdinate system f ZERO, r KSF, r KSD type r - fr the wrk-and-tl cncept - a cmbinatin f crdinate systems f the KSW/KST, r ZERO/KST, r KSW/ZERO type Orientatinal crdinate system (KSB (PI) r KSB(USER) type) Leveling crdinate system (f the KLD(USER), r KLD(PI), r KLF(USER), r KLF(PI) type) By enabling a crdinate system fr ne f the grups, the crdinate system r the crdinate system cmbinatin that was previusly enabled fr this grup is simultaneusly disabled. Sending KEN ZERO re-enables the ZERO perating crdinate system that is enabled by default. When the cmmand level 1 is active (see descriptin f the CCL cmmand in the manual fr the Hexapd cntrller), KEN ZERO als re-enables the PI_Levelling leveling crdinate system which was enabled by default, but nt the PI_Base rientatinal crdinate system which was enabled by default (this can be re-enabled by sending KEN PI_Base). By sending DPA SKS (p. 13), all crdinate systems enabled by default can be re-enabled independently f the currently active cmmand level. The enabled perating crdinate system specifies values fr the fllwing settings (fr the wrk-and-tl cncept, the values are specified using the cmbinatin f tw perating crdinate systems): NLM: Limit fr the lw end f the axis travel range ( sft limit ) PLM: Limit fr the high end f the axis travel range ( sft limit ) SSL: Activatin state f the sft limits f the axis SPI: Crdinates f the pivt pint (nly fr crdinate systems f the KSF and ZERO types)
16 Page 16 / 41 SST: Step size fr mtins initiated by a manual cntrl unit Befre enabling leveling and rientatinal crdinate systems (f the KLD(), KLF() and KSB() types), it is necessary t switch t cmmand level 1 (see CCL). The crdinate systems are enabled and disabled in the vlatile memry. Using WPA, the activatin state can be written t the nnvlatile memry. KEN? (Get Enabled Crdinate Systems) Descriptin: Frmat: Arguments: Lists the names f the enabled crdinate systems and displays their type. KEN? [{<CSName>}] <CSName> is the name f an enabled crdinate system. Illegal: ZERO. When <CSName> is mitted, all enabled crdinate systems are listed. {<CSName>"="<CSType>} where <CSType> gives the crdinate system type. Ntes: KEN? queries the vlatile memry. When the ZERO perating crdinate system is enabled, it is nt displayed in the respnse t KEN? and the respnse cntains nly the fllwing: The enabled leveling crdinate system, i.e., a crdinate system f the KLD(PI), r KLD(USER), r KLF(PI), r KLF(USER) type The enabled rientatinal crdinate system, i.e., a crdinate system f the KSB(PI) r KSB(USER) type If <CSName> is given in the query and the crrespnding crdinate system is nt enabled, the C-887 sends an empty respnse and sets an errr (errr cde query using ERR?). KET? (Get Enabled Crdinate System Types) Descriptin: Frmat: Lists the enabled crdinate system types and displays the names f the crrespnding crdinate systems. KET? [{<CSType>}]
17 Page 17 / 41 Arguments: <CSType> is an enabled crdinate system type. Pssible values: KSW, KST, KSF, KSD, KLD(PI), KLD(USER), KLF(PI), KLF(USER), KSB(PI), KSB(USER) When <CSType> is mitted, all enabled crdinate system types are listed. {<CSType>"="<CSName>} where <CSName> gives the crdinate system name. Ntes: KET? queries the vlatile memry. When the perating crdinate system f the ZERO type is enabled, this type is nt displayed in the respnse t KET?, and the respnse cntains nly the fllwing: The type f the enabled leveling crdinate system, i.e., KLD(PI) r KLD(USER) r KLF(PI) r KLF(USER) The type f the enabled rientatinal crdinate system, i.e., KSB(PI) r KSB(USER) If <CSType> is given in the query and n crdinate system f the crrespnding type is enabled, the C-887 sends an empty respnse and sets an errr (errr cde query using ERR?). KLC? (Get Prperties Of Wrk-And-Tl Cmbinatins) Descriptin: Lists the prperties f the crdinate system cmbinatins fr the wrk-and-tl cncept that are present in the vlatile memry. The wrk-and-tl cncept uses a cmbinatin f tw enabled perating crdinate systems. Generally, the cmbinatin cnsists f ne active crdinate system f the KST type and ne f the KSW type. If a crdinate system is enabled fr nly ne f the tw types, a substitute is autmatically used fr the ther type. Crdinate systems used as a substitute are listed under the name "Zer" in the respnse t KLC?, fr details see p. 3. A cmbinatin is created in the vlatile memry when a crdinate system f the KST r KSW type is enabled. The cmbinatins remain in the vlatile memry even if the crdinate systems f the KST r KSW type cntained therein are n lnger enabled. When a crdinate system f the KST r KSW type is deleted using KRM, the respnse t KLC? n lnger lists the cmbinatins in which this crdinate system was invlved.
18 Page 18 / 41 Using WPA, the cmbinatins in the vlatile memry can be written t the nnvlatile memry. Using KLS?, the prperties f the crdinate systems in the vlatile memry can be queried. Frmat: Arguments: KLC? [<CSName1>[<CSName2>[<Item1>[<Item2>]]]] <CSName1> is the name f a crdinate system f the KST r KSW type which is part f a cmbinatin in the vlatile memry. <CSName2> is the name f a crdinate system f the KST r KSW type which is part f a cmbinatin in the vlatile memry. <Item1> is a prperty f the axes f the cntrller fr the queried cmbinatin f crdinate systems. Pssible values: NLM: Limit fr the lw end f the axis travel range ( sft limit ) PLM: Limit fr the high end f the axis travel range ( sft limit ) SSL: Activatin state f the sft limits f the axis SST: Step size fr mtins initiated by a manual cntrl unit The settings fr the prperties f the currently enabled cmbinatin can be changed using the crrespnding cmmands and saved using WPA. <Item2> is an axis f the cntrller, pssible values: X, Y, Z, U, V, W If the prperties f all crdinate system cmbinatins are t be listed, all arguments are mitted. <String> <String> cntains infrmatin, in XML, n the crdinate systems in the vlatile memry. The respnse structure depends n the number f arguments in the cmmand sent. Pssible respnses, depending n the number f arguments in the example f crdinate systems Nde1, Nde2, Nde3 and Nde4: Sent KLC? <CmbinedCrdinateSystem>[SP][LF] [TAB] <NODE1.NODE2 Name="NODE1.NODE2" Wrk="NODE1" Tl="NODE2">[SP][LF] [TAB] [TAB] <NLM X="-3.0" W="-5.0"/>[SP][LF] [TAB] [TAB] <PLM X="3.0" W="5.0"/>[SP][LF]
19 Page 19 / 41 [TAB] [TAB] <SSL X="1" Y="0" W="1"/> [SP][LF] [TAB] [TAB] <SST X="0.1" W="0.2"/>[SP][LF] [TAB] </NODE1.NODE2>[SP][LF] [TAB] [TAB] <NODE1.NODE4 Name="NODE1.NODE4" Wrk="NODE1" Tl="NODE4"> [SP][LF] [TAB] [TAB] <NLM X="-4.0" W="-3.4"/>[SP][LF] [TAB] [TAB] <PLM X="2.0" W="2.0"/>[SP][LF] [TAB] [TAB] <SSL X="1" Y="0" W="1"/> [SP][LF] [TAB] [TAB] <SST X="0.2" W="0.15"/>[SP][LF] [TAB] </NODE1.NODE4>[SP][LF] </CmbinedCrdinateSystem>[LF] Sent KLC? Nde1 <CmbinedCrdinateSystem>[SP][LF] [TAB] <NODE1.NODE2 Name="NODE1.NODE2" Wrk="NODE1" Tl="NODE2"> [SP][LF] [TAB] [TAB] <NLM X="-3.0" W="-5.0"/>[SP][LF] [TAB] [TAB] <PLM X="3.0" W="5.0"/>[SP][LF] [TAB] [TAB] <SSL X="1" Y="0" W="1"/> [SP][LF] [TAB] [TAB] <SST X="0.1" W="0.2"/>[SP][LF] [TAB] </NODE1.NODE2 >[SP][LF] [TAB] <NODE1.NODE4 Name="NODE1.NODE4" Wrk="NODE1" Tl="NODE4"> [SP][LF] [TAB] [TAB] <NLM X="-1.0" W="-7.0"/>[SP][LF] [TAB] [TAB] <PLM X="1.1" W="10.0"/>[SP][LF] [TAB] [TAB] <SSL X="1" Y="0" W="1"/> [SP][LF] [TAB] [TAB] <SST X="0.2" W="0.21"/>[SP][LF] [TAB] </NODE1.NODE4 >[SP][LF] </CmbinedCrdinateSystem>[LF] Sent KLC? Nde1 Nde2 <CmbinedCrdinateSystem>[SP][LF] [TAB] <NODE1.NODE2 Name="NODE1.NODE2" Wrk="NODE1" Tl="NODE2"> [SP][LF] [TAB] [TAB] <NLM X="-3.0" W="-5.0"/>[SP][LF] [TAB] [TAB] <PLM X="3.0" W="5.0"/>[SP][LF] [TAB] [TAB] <<SSL X="1" Y="0" W="1"/> [SP][LF] [TAB] [TAB] <SST X="0.1" W="0.2"/>[SP][LF] [TAB] </NODE1.NODE2 >[SP][LF] </CmbinedCrdinateSystem>[LF]
20 Page 20 / 41 Sent KLC? Nde1 Nde2 PLM <PLM X="3.0" W="5.0"/>[LF] Sent KLC? Nde1 Nde2 PLM X X = 3.0 [LF] KLD (Define Leveling Crdinate System By Specifying Values) Descriptin: Defines a leveling crdinate system f the KLD(USER) type fr permanently crrecting errrs in the Hexapd alignment (e.g., faulty munting). The leveling crdinate system is defined n the basis f measurements (e.g., using an interfermeter) and crrects the linear displacement (X, Y, Z axes) and axis inclinatin (U, V, W axes) f the mving platfrm f the Hexapd. If the linear displacement and axis inclinatin cannt be measured: Use KLF t define a leveling crdinate system. The crdinate system is defined in the vlatile memry. Using WPA, the definitin can be written t the nnvlatile memry. Frmat: Arguments: Ntes: KLD <CSName> [{<AxisID> <Offset>}] <CSName> is the name f the crdinate system t be defined. <AxisID> is ne axis f the cntrller. Pssible values: X, Y, Z, U, V, W. <Offset> is an ffset which is added after the reference mve t the current psitin value f the axis; in physical units. Fr axes nt given in the KLD cmmand, the ffset is set t zer. Nne Befre defining a leveling crdinate system, it is necessary t switch t cmmand level 1 (see CCL). Optins fr defining a crdinate system using KLD: <CSName> is a new name. The leveling crdinate system is created under this new name. <CSName> is the name f an existing crdinate system that is nt in use. The crdinate system is verwritten by the definitin created with KLD. Recmmended prcedure fr defining and enabling a leveling crdinate system f the KLD(USER) type:
21 Page 21 / Perfrm a reference mve (see FRF) 2. Measure the discrepancy between the psitin and rientatin f the mving platfrm f the Hexapd and the psitin and rientatin fr which X = 0, Y = 0, Z = 0, U = 0, V = 0, W = 0 is applicable in future (measurement using an external measuring instrument) 3. Switch t cmmand level 1 by sending CCL 1 advanced 4. Define the leveling crdinate system using KLD by giving the measured discrepancies fr the axes f the mving platfrm (ffset values) 5. Enable the leveling crdinate system (see KEN) 6. Optinal: Define the behavir after the reference mve by setting the Behavir After Reference Mve (ID 0x ) and Target Fr Mtin After Reference Mve (ID 0x ) parameters. In this way, fr example, the platfrm can autmatically be mved t the zer psitin after the reference mve. Value f the parameter 0x = 0: Mving platfrm remains in the reference psitin after the reference mve, i.e., at the reference pint switches f the Hexapd struts Value f parameter 0x = 1: After the reference mve, the mving platfrm mves t the target psitin which is given by parameter 0x Save the settings by sending WPA SKS The ffset values which are displayed in the respnse t KLS? fr the crdinate systems f the KLD(USER) type result by means f recalculatin frm all currently enabled crdinate systems. Thus, they can change when changing the enabled crdinate systems. The ffset values listed in the respnse t KLT?, hwever, refer in each case t the given predecessr in the chain and are thus independent f the currently enabled crdinate systems. The fllwing applies fr leveling crdinate systems defined using KLD: The leveling crdinate system is always the direct successr t the default PI_Levelling leveling crdinate system (autmatic linking). The leveling crdinate system cannt be linked t ther crdinate systems using KLN DPA SKS re-enables independently f the currently enabled cmmand level the default PI_Levelling leveling crdinate system, fr details see KEN.
22 Page 22 / 41 KLF (Define Leveling Crdinate System At Current Psitin) Descriptin: Defines a leveling crdinate system f the KLF(USER) type fr permanently crrecting errrs in the Hexapd alignment (e.g., faulty munting). T define the leveling crdinate system, the mving platfrm after the reference mve is cmmanded int the psitin and rientatin fr which X = 0, Y = 0, Z = 0, U = 0, V = 0, W = 0 is applicable in future. Sending KLF defines a crdinate system with ffset values which are added, after the reference mve, t the current psitin values fr the axes; in physical units. If the linear displacement (X, Y, Z axes) and axis inclinatin (U, V, W axes) are t be measured: Use KLD t define a leveling crdinate system. The crdinate system is defined in the vlatile memry. Using WPA, the definitin can be written t the nnvlatile memry. Frmat: Arguments: Ntes: KLF <CSName> <CSName> is the name f the crdinate system t be defined. Nne Befre defining a leveling crdinate system, it is necessary t switch t cmmand level 1 (see CCL). Optins fr defining a crdinate system using KLF: <CSName> is a new name. The leveling crdinate system is created under this new name. <CSName> is the name f an existing crdinate system that is nt in use. The crdinate system is verwritten by the definitin created with KLF. The definitin using KLF is pssible nly when the Hexapd is nt in mtin. Recmmended prcedure fr defining and enabling a leveling crdinate system f the KLF(USER) type: 1. Perfrm a reference mve (see FRF) 2. Apprach the psitin and rientatin f the mving platfrm f the Hexapd fr which X = 0, Y = 0, Z = 0, U = 0, V = 0, W = 0 is applicable in future 3. Switch t cmmand level 1 by sending CCL 1 advanced 4. Define the leveling crdinate system using KLF 5. Enable the leveling crdinate system (see KEN) 6. Optinal: Define the behavir after the reference mve by setting the Behavir After Reference Mve (ID 0x ) and Target Fr Mtin After
23 Page 23 / 41 Reference Mve (ID 0x ) parameters. In this way, fr example, the platfrm can autmatically be mved t the zer psitin after the reference mve. Value f the parameter 0x = 0: Mving platfrm remains in the reference psitin after the reference mve, i.e., at the reference pint switches f the Hexapd struts Value f parameter 0x = 1: After the reference mve, the mving platfrm mves t the target psitin which is given by parameter 0x Save the settings by sending WPA SKS The ffset values which are displayed in the respnse t KLS? fr the crdinate systems f the KLF(USER) type result by means f recalculatin frm all currently enabled crdinate systems. Thus, they can change when changing the enabled crdinate systems. The ffset values listed in the respnse t KLT?, hwever, refer in each case t the given predecessr in the chain and are thus independent f the currently enabled crdinate systems. The fllwing applies fr leveling crdinate systems defined using KLF: The leveling crdinate system is always the direct successr t the default PI_Levelling leveling crdinate system (autmatic linking). The leveling crdinate system cannt be linked t ther crdinate systems using KLN DPA SKS re-enables independently f the currently enabled cmmand level the default PI_Levelling leveling crdinate system, fr details see KEN. KLN (Link Crdinate Systems) Descriptin: Frmat: Arguments: Ntes: Links tw crdinate systems t create a chain f predecessr and successr. KLN <CSName1> <CSName2> <CSName1> is the name f the crdinate system which is t be attached in the chain as successr t <CSName2>. <CSName2> is the name f the crdinate system which is t be the predecessr f <CSName1> in the chain. Nne Each crdinate system is part f at least ne chain. Fr the basic structure f crdinate system chains, see "Grups and Types f Crdinate Systems" (p. 2) and "Linking f Crdinate Systems" (p. 5).
24 Page 24 / 41 By default, the fllwing crdinate systems are linked t frm a chain: The HEXAPOD crdinate system, which is based n the cnfiguratin file with the gemetric data f the Hexapd, is the "rigin" f all chains and the predecessr f the PI_Levelling leveling crdinate system (fixed linking) PI_Levelling is the predecessr f the PI_Base rientatinal crdinate system PI_Base is the predecessr f the ZERO perating crdinate system The fllwing applies fr linked crdinate systems: The actual ffset values fr the psitin f the X, Y, Z, U, V, W axes result frm the ffset values fr the predecessrs linked t a crdinate system (fr details, see KLT?). Each crdinate system has precisely ne predecessr and can have at least ne successr. When a crdinate system is enabled, all predecessrs in the chain are likewise in use and cannt be deleted r verwritten. When a crdinate system (unused) is deleted, its predecessr and successr are linked t ne anther in the chain. Limitatins fr creating chains using KLN: A crdinate system cannt be linked t itself. Althugh ring cnnectins frm at least tw crdinate systems can be frmed, they cannt be enabled using KEN. Using KLN, a crdinate system in use cannt be attached as successr t anther crdinate system. Using KLN, a crdinate system (nt in use) can be attached as successr t a crdinate system in use. Befre linking rientatinal crdinate systems f the KSB(USER) type as successr, it is necessary t switch t cmmand level 1 (see CCL). Using KLN, crdinate systems f the KLD(PI), KLF(PI), KLD(USER), KLF(USER) types and the HEXAPOD crdinate system cannt be linked. Using KLN, the PI_Base crdinate system cannt be attached as successr t anther crdinate system. Using KLN, crdinate systems f the KSB(USER) type can nly be linked t ther crdinate systems f the KSB(USER) type r as successr t the PI_Base crdinate system. Using KLN, the ZERO crdinate system cannt be attached as successr t anther crdinate system. Using KLN, crdinate systems are linked in the vlatile memry. Using WPA, the linking can be written t the nnvlatile memry.
25 Page 25 / 41 KLN? (Get Crdinate System Chains) Descriptin: Lists the cmpnents f the existing crdinate system chains. Each crdinate system is part f at least ne chain. Fr the basic structure f crdinate system chains, see "Linking f Crdinate Systems" (p. 5). Frmat: Arguments: KLN? [{<CSName>}] <CSName> is the name f a crdinate system, the predecessrs f which are t be listed in the chain. If the predecessrs f all crdinate systems are t be listed, <CSName> is mitted. {<CSName>"="<String>} where <String> cntains the names f the crdinate system predecessrs in the chain. The "rigin" f the chain is always given at the end f the line Ntes: T ensure a clear verview, nly the predecessrs up t the ZERO crdinate system are listed fr perating crdinate systems f the KSD, KSF, KSW and KST types. The predecessrs f ZERO, hwever, can be specifically queried and are als cntained as a separate line in the respnse if <CSName> is mitted frm the query. KLS? (Get Crdinate System Prperties) Descriptin: Lists the prperties f the crdinate systems that are present in the vlatile memry. Using WPA, the crdinate systems in the vlatile memry can be written t the nnvlatile memry. The prperties f the crdinate system cmbinatins fr the wrk-and-tl cncept that are present in the vlatile memry can be queried using KLC?. Frmat: Arguments: KLS? [<CSName>[<Item1>[<Item2>]]] <CSName> is the name f a crdinate system. Illegal: HEXAPOD. <Item1> is a prperty f the axes f the cntrller. Pssible values: Fr all types f crdinate systems: POS: Offset fr psitins f the axes Only fr crdinate systems f the KSD, KSF and ZERO types:
26 Page 26 / 41 NLM: Limit fr the lw end f the axis travel range ( sft limit ) PLM: Limit fr the high end f the axis travel range ( sft limit ) SSL: Activatin state f the sft limits f the axis SST: Step size fr mtins initiated by a manual cntrl unit Only fr crdinate systems f the KSF and ZERO types: SPI: Crdinates f the pivt pint <Item2> is an axis f the cntrller, pssible values: X, Y, Z, U, V, W If the prperties f all crdinate systems are t be listed, all arguments are mitted. <String> <String> cntains infrmatin, in XML, n the crdinate systems in the vlatile memry. The <String> structure depends n the number f arguments in the cmmand sent. If n argument r nly the name f a crdinate system is given, <String> lists, fr each crdinate system cntained in the respnse, the data applicable fr <Item1> and <Item2> as well as the infrmatin belw: Name f the crdinate system (Name="") Name f the direct predecessr f the crdinate system in the chain (Parent="") Nte: Current use f the crdinate system; Used="True": The crdinate system is in use, i.e., it is either enabled itself, r it is a predecessr f the enabled crdinate system in its chain. Used="False": The crdinate system is nt used. Crdinate system type (Type="") The ffset values which are displayed in the respnse t KLS? fr the leveling crdinate systems f the KLD(USER) and KLF(USER) types result by means f recalculatin frm all currently enabled crdinate systems. Thus, they can change when changing the enabled crdinate systems. Example: KLS? <SingleCrdinateSystem> The example belw shws the respnse t KLS? fr the crdinate systems existing by default. <ZERO Name="ZERO" Parent="PI_BASE" Used="True" Type="ZERO"> <POS X=" " Y=" " Z=" " U=" " V=" " W=" "/> <NLM X=" " Y=" " Z=" " U=" " V=" " W=" "/> <PLM X=" " Y=" " Z=" " U=" " V=" " W=" "/> <SSL X="1" Y="1" Z="1" U="1" V="1" W="1"/> <SPI R=" " S=" " T=" "/>
27 Page 27 / 41 <SST X=" " Y=" " Z=" " U=" " V=" " W=" "/> </ZERO> <PI_BASE Name="PI_BASE" Parent="PI_LEVELLING" Used="True" Type="KSB(PI)"> <POS X=" " Y=" " Z=" " U=" " V=" " W=" "/> </PI_BASE> <PI_LEVELLING Name="PI_LEVELLING" Parent="HEXAPOD" Used="True" Type="KLD(PI)"> <POS X=" " Y=" " Z=" " U=" " V=" " W=" "/> </PI_LEVELLING></SingleCrdinateSystem> KLT? (Get Offsets Resulting Frm A Chain) Descriptin: Lists, fr a crdinate system, the actual ffset values fr the psitin f the X, Y, Z, U, V, W axes which result frm the ffset values f the predecessrs linked t this crdinate system. Fr perating crdinate systems, nly the perating crdinate systems linked as predecessrs up t the ZERO crdinate system are included in the calculatin. Fr rientatinal crdinate systems, nly the rientatinal crdinate systems linked as predecessrs up t the HEXAPOD crdinate system are included in the calculatin. Fr leveling crdinate systems, nly the leveling crdinate systems linked as predecessrs up t the HEXAPOD crdinate system are included in the calculatin. Frmat: Arguments: KLT? [<StartCS> [<EndCS>]] <StartCS> is the name f the crdinate system fr which the ffset values resulting frm its predecessrs are t be queried. <EndCS> is the name f a crdinate system linked as a predecessr f <StartCS>, which is t be used as the starting pint fr the ffset calculatin. If <EndCS> is mitted, the starting pint fr the calculatin depends n the value fr <StartCS>: <StartCS> is an perating crdinate system (KSD, KSF, KST, KSW r ZERO type): Starting pint is ZERO <StartCS> is an rientatinal r leveling crdinate system (KSB(PI), KSB(USER), KLD(PI), KLD(USER), KLF(PI), KLF(USER) types): Starting pint is HEXAPOD If the resultant ffset values fr all crdinate systems are t be listed, all arguments are mitted.
28 Page 28 / 41 <String> <String> cntains, fr each queried crdinate system, a line with the fllwing data: Name: The name f the crdinate system fr which the resultant ffset values are listed. EndCrdinateSystem: The name f the crdinate system which was used as the starting pint fr calculating the ffset values. X, Y, Z, U, V, W: Resultant ffset value fr the crrespnding axis. Nte: KLT? queries the vlatile memry. Example: KLT? Using KLS?, the prperties f the crdinate systems in the vlatile memry can be queried. The example belw shws the respnse t KLT? fr the crdinate systems existing by default. Name=ZERO EndCrdinateSystem=ZERO X= Y= Z= U= V= W= Name=PI_BASE EndCrdinateSystem=HEXAPOD X= Y= Z= U= V= W= Name=PI_LEVELLING EndCrdinateSystem=HEXAPOD X= Y= Z= U= V= W= KRM (Remve Crdinate System) Descriptin: Frmat: Arguments: Ntes: Deletes a crdinate system. KRM <CSName> <CSName> is the name f the crdinate system t be deleted. Nne A crdinate system in use (i.e., it is enabled itself r linked t the enabled crdinate system as a predecessr) cannt be deleted. When a crdinate system (unused) is deleted, its predecessr and its successr are linked t ne anther in the crdinate system chain. Befre deleting a leveling crdinate system f the KLD(USER), KLF(USER) and KSB(USER) types, it is necessary t switch t cmmand level 1 (see CCL). The crdinate system is deleted frm the vlatile memry. Using WPA, the deletin can be transferred t the nnvlatile memry.
29 Page 29 / 41 KSB (Define Orientatinal Crdinate System) Descriptin: Defines an rientatinal crdinate system f the KSB(USER) type fr permanently changing the directin f the X, and/r Y, and/r Z axes. The directin f the axes is changed by rtating the crdinate system in 90 increments as fllws: Rtating arund X, i.e., angular value given fr U, changes the directin f the Y and Z axes Rtating arund Y, i.e., angular value given fr V, changes the directin f the X and Z axes Rtating arund Z, i.e., angular value given fr W, changes the directin f the X and Y axes The crdinate system is defined in the vlatile memry. Using WPA, the definitin can be written t the nnvlatile memry. Frmat: Arguments: Ntes: KSB <CSName> [{<AxisID> <Angle>}] <CSName> is the name f the crdinate system t be defined. <AxisID> is ne axis f the cntrller. Pssible values: U, V, W. <Angle> is the angle arund which the axis is t be rtated. Pssible values: 0, 90, 180, 270, -90, -180, -270 (unit: Degree). Fr axes nt given in the KSB cmmand, the angle is set t zer. Nne Befre defining an rientatinal crdinate system, it is necessary t switch t cmmand level 1 (see CCL). Optins fr defining a crdinate system using KSB: <CSName> is a new name. The rientatinal crdinate system is newly created under this name and autmatically has the enabled rientatinal crdinate system as its predecessr <CSName> is the name f an existing crdinate system that is nt in use. The crdinate system is verwritten by the definitin using KSB and autmatically attached as successr t the enabled rientatinal crdinate system Using KLN, rientatinal crdinate systems f the KSB(USER) type can be linked t ther crdinate systems f the KSB(USER) type r attached as successr t the PI_Base crdinate system. Orientatinal crdinate systems f the KSB(USER) type can be enabled using KEN. DPA SKS re-enables the PI_Base rientatinal crdinate system that is enabled by default, fr details see KEN.
Purchase Order Workflow Processing
 P a g e 1 Purchase Order Wrkflw Prcessing P a g e 2 Table f Cntents PO Wrkflw Prcessing...3 Create a Purchase Order...3 Submit a Purchase Order...4 Review/Apprve the PO...4 Prcess the PO...6 P a g e 3
P a g e 1 Purchase Order Wrkflw Prcessing P a g e 2 Table f Cntents PO Wrkflw Prcessing...3 Create a Purchase Order...3 Submit a Purchase Order...4 Review/Apprve the PO...4 Prcess the PO...6 P a g e 3
Department of Electrical Engineering, University of Waterloo. Introduction
 Sectin 4: Sequential Circuits Majr Tpics Types f sequential circuits Flip-flps Analysis f clcked sequential circuits Mre and Mealy machines Design f clcked sequential circuits State transitin design methd
Sectin 4: Sequential Circuits Majr Tpics Types f sequential circuits Flip-flps Analysis f clcked sequential circuits Mre and Mealy machines Design f clcked sequential circuits State transitin design methd
TRAINING GUIDE. Overview of Lucity Spatial
 TRAINING GUIDE Overview f Lucity Spatial Overview f Lucity Spatial In this sessin, we ll cver the key cmpnents f Lucity Spatial. Table f Cntents Lucity Spatial... 2 Requirements... 2 Supprted Mdules...
TRAINING GUIDE Overview f Lucity Spatial Overview f Lucity Spatial In this sessin, we ll cver the key cmpnents f Lucity Spatial. Table f Cntents Lucity Spatial... 2 Requirements... 2 Supprted Mdules...
Subject description processes
 Subject representatin 6.1.2. Subject descriptin prcesses Overview Fur majr prcesses r areas f practice fr representing subjects are classificatin, subject catalging, indexing, and abstracting. The prcesses
Subject representatin 6.1.2. Subject descriptin prcesses Overview Fur majr prcesses r areas f practice fr representing subjects are classificatin, subject catalging, indexing, and abstracting. The prcesses
CONSTRUCTING STATECHART DIAGRAMS
 CONSTRUCTING STATECHART DIAGRAMS The fllwing checklist shws the necessary steps fr cnstructing the statechart diagrams f a class. Subsequently, we will explain the individual steps further. Checklist 4.6
CONSTRUCTING STATECHART DIAGRAMS The fllwing checklist shws the necessary steps fr cnstructing the statechart diagrams f a class. Subsequently, we will explain the individual steps further. Checklist 4.6
Turing Machines. Human-aware Robotics. 2017/10/17 & 19 Chapter 3.2 & 3.3 in Sipser Ø Announcement:
 Turing Machines Human-aware Rbtics 2017/10/17 & 19 Chapter 3.2 & 3.3 in Sipser Ø Annuncement: q q q q Slides fr this lecture are here: http://www.public.asu.edu/~yzhan442/teaching/cse355/lectures/tm-ii.pdf
Turing Machines Human-aware Rbtics 2017/10/17 & 19 Chapter 3.2 & 3.3 in Sipser Ø Annuncement: q q q q Slides fr this lecture are here: http://www.public.asu.edu/~yzhan442/teaching/cse355/lectures/tm-ii.pdf
THE LIFE OF AN OBJECT IT SYSTEMS
 THE LIFE OF AN OBJECT IT SYSTEMS Persns, bjects, r cncepts frm the real wrld, which we mdel as bjects in the IT system, have "lives". Actually, they have tw lives; the riginal in the real wrld has a life,
THE LIFE OF AN OBJECT IT SYSTEMS Persns, bjects, r cncepts frm the real wrld, which we mdel as bjects in the IT system, have "lives". Actually, they have tw lives; the riginal in the real wrld has a life,
Chemistry 20 Lesson 11 Electronegativity, Polarity and Shapes
 Chemistry 20 Lessn 11 Electrnegativity, Plarity and Shapes In ur previus wrk we learned why atms frm cvalent bnds and hw t draw the resulting rganizatin f atms. In this lessn we will learn (a) hw the cmbinatin
Chemistry 20 Lessn 11 Electrnegativity, Plarity and Shapes In ur previus wrk we learned why atms frm cvalent bnds and hw t draw the resulting rganizatin f atms. In this lessn we will learn (a) hw the cmbinatin
Building to Transformations on Coordinate Axis Grade 5: Geometry Graph points on the coordinate plane to solve real-world and mathematical problems.
 Building t Transfrmatins n Crdinate Axis Grade 5: Gemetry Graph pints n the crdinate plane t slve real-wrld and mathematical prblems. 5.G.1. Use a pair f perpendicular number lines, called axes, t define
Building t Transfrmatins n Crdinate Axis Grade 5: Gemetry Graph pints n the crdinate plane t slve real-wrld and mathematical prblems. 5.G.1. Use a pair f perpendicular number lines, called axes, t define
TP1 - Introduction to ArcGIS
 TP1 - Intrductin t ArcGIS During this practical, we will use ArcGIS (ArcMap and ArcCatalg) t create maps f predictrs that culd explain the bserved bird richness in Switzerland. ArcMap is principally used
TP1 - Intrductin t ArcGIS During this practical, we will use ArcGIS (ArcMap and ArcCatalg) t create maps f predictrs that culd explain the bserved bird richness in Switzerland. ArcMap is principally used
CS 477/677 Analysis of Algorithms Fall 2007 Dr. George Bebis Course Project Due Date: 11/29/2007
 CS 477/677 Analysis f Algrithms Fall 2007 Dr. Gerge Bebis Curse Prject Due Date: 11/29/2007 Part1: Cmparisn f Srting Algrithms (70% f the prject grade) The bjective f the first part f the assignment is
CS 477/677 Analysis f Algrithms Fall 2007 Dr. Gerge Bebis Curse Prject Due Date: 11/29/2007 Part1: Cmparisn f Srting Algrithms (70% f the prject grade) The bjective f the first part f the assignment is
ECE 545 Project Deliverables
 ECE 545 Prject Deliverables Tp-level flder: _ Secnd-level flders: 1_assumptins 2_blck_diagrams 3_interface 4_ASM_charts 5_surce_cde 6_verificatin 7_timing_analysis 8_results
ECE 545 Prject Deliverables Tp-level flder: _ Secnd-level flders: 1_assumptins 2_blck_diagrams 3_interface 4_ASM_charts 5_surce_cde 6_verificatin 7_timing_analysis 8_results
Activity Guide Loops and Random Numbers
 Unit 3 Lessn 7 Name(s) Perid Date Activity Guide Lps and Randm Numbers CS Cntent Lps are a relatively straightfrward idea in prgramming - yu want a certain chunk f cde t run repeatedly - but it takes a
Unit 3 Lessn 7 Name(s) Perid Date Activity Guide Lps and Randm Numbers CS Cntent Lps are a relatively straightfrward idea in prgramming - yu want a certain chunk f cde t run repeatedly - but it takes a
Tutorial 3: Building a spectral library in Skyline
 SRM Curse 2013 Tutrial 3 Spectral Library Tutrial 3: Building a spectral library in Skyline Spectral libraries fr SRM methd design and fr data analysis can be either directly added t a Skyline dcument
SRM Curse 2013 Tutrial 3 Spectral Library Tutrial 3: Building a spectral library in Skyline Spectral libraries fr SRM methd design and fr data analysis can be either directly added t a Skyline dcument
Figure 1a. A planar mechanism.
 ME 5 - Machine Design I Fall Semester 0 Name f Student Lab Sectin Number EXAM. OPEN BOOK AND CLOSED NOTES. Mnday, September rd, 0 Write n ne side nly f the paper prvided fr yur slutins. Where necessary,
ME 5 - Machine Design I Fall Semester 0 Name f Student Lab Sectin Number EXAM. OPEN BOOK AND CLOSED NOTES. Mnday, September rd, 0 Write n ne side nly f the paper prvided fr yur slutins. Where necessary,
Kinematic transformation of mechanical behavior Neville Hogan
 inematic transfrmatin f mechanical behavir Neville Hgan Generalized crdinates are fundamental If we assume that a linkage may accurately be described as a cllectin f linked rigid bdies, their generalized
inematic transfrmatin f mechanical behavir Neville Hgan Generalized crdinates are fundamental If we assume that a linkage may accurately be described as a cllectin f linked rigid bdies, their generalized
DEFENSE OCCUPATIONAL AND ENVIRONMENTAL HEALTH READINESS SYSTEM (DOEHRS) ENVIRONMENTAL HEALTH SAMPLING ELECTRONIC DATA DELIVERABLE (EDD) GUIDE
 ENVIRONMENTAL HEALTH SAMPLING ELECTRONIC DATA DELIVERABLE (EDD) GUIDE") DEFENSE OCCUPATIOL AND ENVIRONMENTAL HEALTH READINESS SYSTEM (DOEHRS) ENVIRONMENTAL HEALTH SAMPLING ELECTRONIC DATA DELIVERABLE (EDD) GUIDE 20 JUNE 2017 V1.0 i TABLE OF CONTENTS 1 INTRODUCTION... 1 2 CONCEPT
DEFENSE OCCUPATIOL AND ENVIRONMENTAL HEALTH READINESS SYSTEM (DOEHRS) ENVIRONMENTAL HEALTH SAMPLING ELECTRONIC DATA DELIVERABLE (EDD) GUIDE 20 JUNE 2017 V1.0 i TABLE OF CONTENTS 1 INTRODUCTION... 1 2 CONCEPT
ENGI 4430 Parametric Vector Functions Page 2-01
 ENGI 4430 Parametric Vectr Functins Page -01. Parametric Vectr Functins (cntinued) Any nn-zer vectr r can be decmpsed int its magnitude r and its directin: r rrˆ, where r r 0 Tangent Vectr: dx dy dz dr
ENGI 4430 Parametric Vectr Functins Page -01. Parametric Vectr Functins (cntinued) Any nn-zer vectr r can be decmpsed int its magnitude r and its directin: r rrˆ, where r r 0 Tangent Vectr: dx dy dz dr
Introduction to Spacetime Geometry
 Intrductin t Spacetime Gemetry Let s start with a review f a basic feature f Euclidean gemetry, the Pythagrean therem. In a twdimensinal crdinate system we can relate the length f a line segment t the
Intrductin t Spacetime Gemetry Let s start with a review f a basic feature f Euclidean gemetry, the Pythagrean therem. In a twdimensinal crdinate system we can relate the length f a line segment t the
Physics 2010 Motion with Constant Acceleration Experiment 1
 . Physics 00 Mtin with Cnstant Acceleratin Experiment In this lab, we will study the mtin f a glider as it accelerates dwnhill n a tilted air track. The glider is supprted ver the air track by a cushin
. Physics 00 Mtin with Cnstant Acceleratin Experiment In this lab, we will study the mtin f a glider as it accelerates dwnhill n a tilted air track. The glider is supprted ver the air track by a cushin
MODULE FOUR. This module addresses functions. SC Academic Elementary Algebra Standards:
 MODULE FOUR This mdule addresses functins SC Academic Standards: EA-3.1 Classify a relatinship as being either a functin r nt a functin when given data as a table, set f rdered pairs, r graph. EA-3.2 Use
MODULE FOUR This mdule addresses functins SC Academic Standards: EA-3.1 Classify a relatinship as being either a functin r nt a functin when given data as a table, set f rdered pairs, r graph. EA-3.2 Use
making triangle (ie same reference angle) ). This is a standard form that will allow us all to have the X= y=
 ). This is a standard form that will allow us all to have the X= y=") Intrductin t Vectrs I 21 Intrductin t Vectrs I 22 I. Determine the hrizntal and vertical cmpnents f the resultant vectr by cunting n the grid. X= y= J. Draw a mangle with hrizntal and vertical cmpnents
Intrductin t Vectrs I 21 Intrductin t Vectrs I 22 I. Determine the hrizntal and vertical cmpnents f the resultant vectr by cunting n the grid. X= y= J. Draw a mangle with hrizntal and vertical cmpnents
CESAR Science Case The differential rotation of the Sun and its Chromosphere. Introduction. Material that is necessary during the laboratory
 Teacher s guide CESAR Science Case The differential rtatin f the Sun and its Chrmsphere Material that is necessary during the labratry CESAR Astrnmical wrd list CESAR Bklet CESAR Frmula sheet CESAR Student
Teacher s guide CESAR Science Case The differential rtatin f the Sun and its Chrmsphere Material that is necessary during the labratry CESAR Astrnmical wrd list CESAR Bklet CESAR Frmula sheet CESAR Student
Interference is when two (or more) sets of waves meet and combine to produce a new pattern.
 sets of waves meet and combine to produce a new pattern.") Interference Interference is when tw (r mre) sets f waves meet and cmbine t prduce a new pattern. This pattern can vary depending n the riginal wave directin, wavelength, amplitude, etc. The tw mst extreme
Interference Interference is when tw (r mre) sets f waves meet and cmbine t prduce a new pattern. This pattern can vary depending n the riginal wave directin, wavelength, amplitude, etc. The tw mst extreme
Revision: August 19, E Main Suite D Pullman, WA (509) Voice and Fax
 Voice and Fax") .7.4: Direct frequency dmain circuit analysis Revisin: August 9, 00 5 E Main Suite D Pullman, WA 9963 (509) 334 6306 ice and Fax Overview n chapter.7., we determined the steadystate respnse f electrical
.7.4: Direct frequency dmain circuit analysis Revisin: August 9, 00 5 E Main Suite D Pullman, WA 9963 (509) 334 6306 ice and Fax Overview n chapter.7., we determined the steadystate respnse f electrical
CHM112 Lab Graphing with Excel Grading Rubric
 Name CHM112 Lab Graphing with Excel Grading Rubric Criteria Pints pssible Pints earned Graphs crrectly pltted and adhere t all guidelines (including descriptive title, prperly frmatted axes, trendline
Name CHM112 Lab Graphing with Excel Grading Rubric Criteria Pints pssible Pints earned Graphs crrectly pltted and adhere t all guidelines (including descriptive title, prperly frmatted axes, trendline
AIP Logic Chapter 4 Notes
 AIP Lgic Chapter 4 Ntes Sectin 4.1 Sectin 4.2 Sectin 4.3 Sectin 4.4 Sectin 4.5 Sectin 4.6 Sectin 4.7 4.1 The Cmpnents f Categrical Prpsitins There are fur types f categrical prpsitins. Prpsitin Letter
AIP Lgic Chapter 4 Ntes Sectin 4.1 Sectin 4.2 Sectin 4.3 Sectin 4.4 Sectin 4.5 Sectin 4.6 Sectin 4.7 4.1 The Cmpnents f Categrical Prpsitins There are fur types f categrical prpsitins. Prpsitin Letter
Experiment #3. Graphing with Excel
 Experiment #3. Graphing with Excel Study the "Graphing with Excel" instructins that have been prvided. Additinal help with learning t use Excel can be fund n several web sites, including http://www.ncsu.edu/labwrite/res/gt/gt-
Experiment #3. Graphing with Excel Study the "Graphing with Excel" instructins that have been prvided. Additinal help with learning t use Excel can be fund n several web sites, including http://www.ncsu.edu/labwrite/res/gt/gt-
SPH3U1 Lesson 06 Kinematics
 PROJECTILE MOTION LEARNING GOALS Students will: Describe the mtin f an bject thrwn at arbitrary angles thrugh the air. Describe the hrizntal and vertical mtins f a prjectile. Slve prjectile mtin prblems.
PROJECTILE MOTION LEARNING GOALS Students will: Describe the mtin f an bject thrwn at arbitrary angles thrugh the air. Describe the hrizntal and vertical mtins f a prjectile. Slve prjectile mtin prblems.
Pipetting 101 Developed by BSU CityLab
 Discver the Micrbes Within: The Wlbachia Prject Pipetting 101 Develped by BSU CityLab Clr Cmparisns Pipetting Exercise #1 STUDENT OBJECTIVES Students will be able t: Chse the crrect size micrpipette fr
Discver the Micrbes Within: The Wlbachia Prject Pipetting 101 Develped by BSU CityLab Clr Cmparisns Pipetting Exercise #1 STUDENT OBJECTIVES Students will be able t: Chse the crrect size micrpipette fr
Application Note - Energy Metering at a Medium Voltage Connection Point using a Voltage Transformer
 Applicatin Nte - Energy Metering at a Medium Vltage Cnnectin Pint using a Vltage Transfrmer This dcument describes the cnnectin and cnfiguratin f a Janitza meter at a medium vltage (MV) cnnectin pint t
Applicatin Nte - Energy Metering at a Medium Vltage Cnnectin Pint using a Vltage Transfrmer This dcument describes the cnnectin and cnfiguratin f a Janitza meter at a medium vltage (MV) cnnectin pint t
Document for ENES5 meeting
 HARMONISATION OF EXPOSURE SCENARIO SHORT TITLES Dcument fr ENES5 meeting Paper jintly prepared by ECHA Cefic DUCC ESCOM ES Shrt Titles Grup 13 Nvember 2013 OBJECTIVES FOR ENES5 The bjective f this dcument
HARMONISATION OF EXPOSURE SCENARIO SHORT TITLES Dcument fr ENES5 meeting Paper jintly prepared by ECHA Cefic DUCC ESCOM ES Shrt Titles Grup 13 Nvember 2013 OBJECTIVES FOR ENES5 The bjective f this dcument
ENG2410 Digital Design Sequential Circuits: Part A
 ENG2410 Digital Design Sequential Circuits: Part A Fall 2017 S. Areibi Schl f Engineering University f Guelph Week #6 Tpics Sequential Circuit Definitins Latches Flip-Flps Delays in Sequential Circuits
ENG2410 Digital Design Sequential Circuits: Part A Fall 2017 S. Areibi Schl f Engineering University f Guelph Week #6 Tpics Sequential Circuit Definitins Latches Flip-Flps Delays in Sequential Circuits
5 th grade Common Core Standards
 5 th grade Cmmn Cre Standards In Grade 5, instructinal time shuld fcus n three critical areas: (1) develping fluency with additin and subtractin f fractins, and develping understanding f the multiplicatin
5 th grade Cmmn Cre Standards In Grade 5, instructinal time shuld fcus n three critical areas: (1) develping fluency with additin and subtractin f fractins, and develping understanding f the multiplicatin
8 th Grade Math: Pre-Algebra
 Hardin Cunty Middle Schl (2013-2014) 1 8 th Grade Math: Pre-Algebra Curse Descriptin The purpse f this curse is t enhance student understanding, participatin, and real-life applicatin f middle-schl mathematics
Hardin Cunty Middle Schl (2013-2014) 1 8 th Grade Math: Pre-Algebra Curse Descriptin The purpse f this curse is t enhance student understanding, participatin, and real-life applicatin f middle-schl mathematics
Rotator PTR-35. Operating instructions
 Rtatr PTR-35 Versin 3.01 - January 2012 Page 2 Cntents 1 Safety...4 2 General Infrmatin...5 3 Getting Started...6 4 Operatin f PTR-35...8 5 Specificatins...11 6 Guarantee and service...13 Versin 3.01 -
Rtatr PTR-35 Versin 3.01 - January 2012 Page 2 Cntents 1 Safety...4 2 General Infrmatin...5 3 Getting Started...6 4 Operatin f PTR-35...8 5 Specificatins...11 6 Guarantee and service...13 Versin 3.01 -
CHAPTER 1. Learning Objectives
 CHTE sitin and Orientatin Definitins and Transfrmatins Marcel H. ng Jr., ug 26 Learning Objectives Describe psitin and rientatin f rigid bdies relative t each ther Mathematically represent relative psitin
CHTE sitin and Orientatin Definitins and Transfrmatins Marcel H. ng Jr., ug 26 Learning Objectives Describe psitin and rientatin f rigid bdies relative t each ther Mathematically represent relative psitin
How do scientists measure trees? What is DBH?
 Hw d scientists measure trees? What is DBH? Purpse Students develp an understanding f tree size and hw scientists measure trees. Students bserve and measure tree ckies and explre the relatinship between
Hw d scientists measure trees? What is DBH? Purpse Students develp an understanding f tree size and hw scientists measure trees. Students bserve and measure tree ckies and explre the relatinship between
BIOLOGY 101. CHAPTER 17: Gene Expression: From Gene to Protein. The Flow of Genetic Information
 BIOLOGY 101 CHAPTER 17: Gene Expressin: Frm Gene t Prtein Gene Expressin: Frm Gene t Prtein: CONCEPTS: 17.1 Genes specify prteins via transcriptin and translatin 17.2 Transcriptin is the DNA-directed synthesis
BIOLOGY 101 CHAPTER 17: Gene Expressin: Frm Gene t Prtein Gene Expressin: Frm Gene t Prtein: CONCEPTS: 17.1 Genes specify prteins via transcriptin and translatin 17.2 Transcriptin is the DNA-directed synthesis
BASD HIGH SCHOOL FORMAL LAB REPORT
 BASD HIGH SCHOOL FORMAL LAB REPORT *WARNING: After an explanatin f what t include in each sectin, there is an example f hw the sectin might lk using a sample experiment Keep in mind, the sample lab used
BASD HIGH SCHOOL FORMAL LAB REPORT *WARNING: After an explanatin f what t include in each sectin, there is an example f hw the sectin might lk using a sample experiment Keep in mind, the sample lab used
CMSC 425: Lecture 9 Basics of Skeletal Animation and Kinematics
 CMSC 425: Lecture 9 Basics f Skeletal Animatin and Kinematics Reading: Chapt f Gregr, Game Engine Architecture. The material n kinematics is a simplificatin f similar cncepts develped in the field f rbtics,
CMSC 425: Lecture 9 Basics f Skeletal Animatin and Kinematics Reading: Chapt f Gregr, Game Engine Architecture. The material n kinematics is a simplificatin f similar cncepts develped in the field f rbtics,
1996 Engineering Systems Design and Analysis Conference, Montpellier, France, July 1-4, 1996, Vol. 7, pp
 THE POWER AND LIMIT OF NEURAL NETWORKS T. Y. Lin Department f Mathematics and Cmputer Science San Jse State University San Jse, Califrnia 959-003 tylin@cs.ssu.edu and Bereley Initiative in Sft Cmputing*
THE POWER AND LIMIT OF NEURAL NETWORKS T. Y. Lin Department f Mathematics and Cmputer Science San Jse State University San Jse, Califrnia 959-003 tylin@cs.ssu.edu and Bereley Initiative in Sft Cmputing*
Chapter 9 Vector Differential Calculus, Grad, Div, Curl
 Chapter 9 Vectr Differential Calculus, Grad, Div, Curl 9.1 Vectrs in 2-Space and 3-Space 9.2 Inner Prduct (Dt Prduct) 9.3 Vectr Prduct (Crss Prduct, Outer Prduct) 9.4 Vectr and Scalar Functins and Fields
Chapter 9 Vectr Differential Calculus, Grad, Div, Curl 9.1 Vectrs in 2-Space and 3-Space 9.2 Inner Prduct (Dt Prduct) 9.3 Vectr Prduct (Crss Prduct, Outer Prduct) 9.4 Vectr and Scalar Functins and Fields
Pattern Recognition 2014 Support Vector Machines
 Pattern Recgnitin 2014 Supprt Vectr Machines Ad Feelders Universiteit Utrecht Ad Feelders ( Universiteit Utrecht ) Pattern Recgnitin 1 / 55 Overview 1 Separable Case 2 Kernel Functins 3 Allwing Errrs (Sft
Pattern Recgnitin 2014 Supprt Vectr Machines Ad Feelders Universiteit Utrecht Ad Feelders ( Universiteit Utrecht ) Pattern Recgnitin 1 / 55 Overview 1 Separable Case 2 Kernel Functins 3 Allwing Errrs (Sft
Homology groups of disks with holes
 Hmlgy grups f disks with hles THEOREM. Let p 1,, p k } be a sequence f distinct pints in the interir unit disk D n where n 2, and suppse that fr all j the sets E j Int D n are clsed, pairwise disjint subdisks.
Hmlgy grups f disks with hles THEOREM. Let p 1,, p k } be a sequence f distinct pints in the interir unit disk D n where n 2, and suppse that fr all j the sets E j Int D n are clsed, pairwise disjint subdisks.
MODULE 1. e x + c. [You can t separate a demominator, but you can divide a single denominator into each numerator term] a + b a(a + b)+1 = a + b
![MODULE 1. e x + c. [You can t separate a demominator, but you can divide a single denominator into each numerator term] a + b a(a + b)+1 = a + b](/thumbs/78/78051685.jpg "MODULE 1. e x + c. [You can t separate a demominator, but you can divide a single denominator into each numerator term] a + b a(a + b)+1 = a + b") . REVIEW OF SOME BASIC ALGEBRA MODULE () Slving Equatins Yu shuld be able t slve fr x: a + b = c a d + e x + c and get x = e(ba +) b(c a) d(ba +) c Cmmn mistakes and strategies:. a b + c a b + a c, but
. REVIEW OF SOME BASIC ALGEBRA MODULE () Slving Equatins Yu shuld be able t slve fr x: a + b = c a d + e x + c and get x = e(ba +) b(c a) d(ba +) c Cmmn mistakes and strategies:. a b + c a b + a c, but
o o IMPORTANT REMINDERS Reports will be graded largely on their ability to clearly communicate results and important conclusions.
 BASD High Schl Frmal Lab Reprt GENERAL INFORMATION 12 pt Times New Rman fnt Duble-spaced, if required by yur teacher 1 inch margins n all sides (tp, bttm, left, and right) Always write in third persn (avid
BASD High Schl Frmal Lab Reprt GENERAL INFORMATION 12 pt Times New Rman fnt Duble-spaced, if required by yur teacher 1 inch margins n all sides (tp, bttm, left, and right) Always write in third persn (avid
SAP Note Missing documentation on enhancement MDR10001
 SAP Nte 303613 - Missing dcumentatin n enhancement Nte Language: English Versin: 2 Validity: Valid Since 31.07.2000 Summary Symptm Missing dcumentatin n SAP enhancement Additinal key wrds CMOD, rder quantity
SAP Nte 303613 - Missing dcumentatin n enhancement Nte Language: English Versin: 2 Validity: Valid Since 31.07.2000 Summary Symptm Missing dcumentatin n SAP enhancement Additinal key wrds CMOD, rder quantity
APPLICATION GUIDE (v4.1)
") 2.2.3 VitalSensrs VS-300 Sensr Management Statin Remte/Relay Guide Implementing Remte-IN/Relay-OUT Digital I/O Fieldbus Objective: Equipment: Becme familiar with the instrument wiring requirements fr the
2.2.3 VitalSensrs VS-300 Sensr Management Statin Remte/Relay Guide Implementing Remte-IN/Relay-OUT Digital I/O Fieldbus Objective: Equipment: Becme familiar with the instrument wiring requirements fr the
LDS emarket. Section 11 - Catalog Load Process
 LDS emarket Sectin 11 - Catalg Lad Prcess Catalg Lad Prcess There are three types f catalgs in LDS emarket: Supplier Direct Web Site An nline catalg f items hsted by the supplier using HTML cding PRG A
LDS emarket Sectin 11 - Catalg Lad Prcess Catalg Lad Prcess There are three types f catalgs in LDS emarket: Supplier Direct Web Site An nline catalg f items hsted by the supplier using HTML cding PRG A
Purpose: Use this reference guide to effectively communicate the new process customers will use for creating a TWC ID. Mobile Manager Call History
 Purpse: Use this reference guide t effectively cmmunicate the new prcess custmers will use fr creating a TWC ID. Overview Beginning n January 28, 2014 (Refer t yur Knwledge Management System fr specific
Purpse: Use this reference guide t effectively cmmunicate the new prcess custmers will use fr creating a TWC ID. Overview Beginning n January 28, 2014 (Refer t yur Knwledge Management System fr specific
Temperature sensor / Dual Temp+Humidity
 www.akcp.cm Temperature sensr / Dual Temp+Humidity Intrductin Temperature sensrs are imprtant where ptimum temperature cntrl is paramunt. If there is an air cnditining malfunctin r abnrmal weather cnditins,
www.akcp.cm Temperature sensr / Dual Temp+Humidity Intrductin Temperature sensrs are imprtant where ptimum temperature cntrl is paramunt. If there is an air cnditining malfunctin r abnrmal weather cnditins,
Standard Title: Frequency Response and Frequency Bias Setting. Andrew Dressel Holly Hawkins Maureen Long Scott Miller
 Template fr Quality Review f NERC Reliability Standard BAL-003-1 Frequency Respnse and Frequency Bias Setting Basic Infrmatin: Prject number: 2007-12 Standard number: BAL-003-1 Prject title: Frequency
Template fr Quality Review f NERC Reliability Standard BAL-003-1 Frequency Respnse and Frequency Bias Setting Basic Infrmatin: Prject number: 2007-12 Standard number: BAL-003-1 Prject title: Frequency
Chapter 3: Cluster Analysis
 Chapter 3: Cluster Analysis } 3.1 Basic Cncepts f Clustering 3.1.1 Cluster Analysis 3.1. Clustering Categries } 3. Partitining Methds 3..1 The principle 3.. K-Means Methd 3..3 K-Medids Methd 3..4 CLARA
Chapter 3: Cluster Analysis } 3.1 Basic Cncepts f Clustering 3.1.1 Cluster Analysis 3.1. Clustering Categries } 3. Partitining Methds 3..1 The principle 3.. K-Means Methd 3..3 K-Medids Methd 3..4 CLARA
Differentiation Applications 1: Related Rates
 Differentiatin Applicatins 1: Related Rates 151 Differentiatin Applicatins 1: Related Rates Mdel 1: Sliding Ladder 10 ladder y 10 ladder 10 ladder A 10 ft ladder is leaning against a wall when the bttm
Differentiatin Applicatins 1: Related Rates 151 Differentiatin Applicatins 1: Related Rates Mdel 1: Sliding Ladder 10 ladder y 10 ladder 10 ladder A 10 ft ladder is leaning against a wall when the bttm
Physical Layer: Outline
 18-: Intrductin t Telecmmunicatin Netwrks Lectures : Physical Layer Peter Steenkiste Spring 01 www.cs.cmu.edu/~prs/nets-ece Physical Layer: Outline Digital Representatin f Infrmatin Characterizatin f Cmmunicatin
18-: Intrductin t Telecmmunicatin Netwrks Lectures : Physical Layer Peter Steenkiste Spring 01 www.cs.cmu.edu/~prs/nets-ece Physical Layer: Outline Digital Representatin f Infrmatin Characterizatin f Cmmunicatin
2/3 Axis Position Indicator
 SERIES Z-89 2/3 Axis Psitin Indicatr Pwer dwn memry Selectable decimal pint Multi edge functin Pulse factr Reference value External reset r preset inputs Digital brightness cntrl Z89-000-E_21-06.dc Dku
SERIES Z-89 2/3 Axis Psitin Indicatr Pwer dwn memry Selectable decimal pint Multi edge functin Pulse factr Reference value External reset r preset inputs Digital brightness cntrl Z89-000-E_21-06.dc Dku
Flipping Physics Lecture Notes: Simple Harmonic Motion Introduction via a Horizontal Mass-Spring System
 Flipping Physics Lecture Ntes: Simple Harmnic Mtin Intrductin via a Hrizntal Mass-Spring System A Hrizntal Mass-Spring System is where a mass is attached t a spring, riented hrizntally, and then placed
Flipping Physics Lecture Ntes: Simple Harmnic Mtin Intrductin via a Hrizntal Mass-Spring System A Hrizntal Mass-Spring System is where a mass is attached t a spring, riented hrizntally, and then placed
and the Doppler frequency rate f R , can be related to the coefficients of this polynomial. The relationships are:
 Algrithm fr Estimating R and R - (David Sandwell, SIO, August 4, 2006) Azimith cmpressin invlves the alignment f successive eches t be fcused n a pint target Let s be the slw time alng the satellite track
Algrithm fr Estimating R and R - (David Sandwell, SIO, August 4, 2006) Azimith cmpressin invlves the alignment f successive eches t be fcused n a pint target Let s be the slw time alng the satellite track
Dry-Contact switch Installation Guide
 Dry-Cntact switch Installatin Guide Overview The SlarEdge Smart Energy Management slutins allw increasing the self-cnsumptin f a site. One methd used fr this purpse is cntrlling the usage (cnsumptin) f
Dry-Cntact switch Installatin Guide Overview The SlarEdge Smart Energy Management slutins allw increasing the self-cnsumptin f a site. One methd used fr this purpse is cntrlling the usage (cnsumptin) f
Flipping Physics Lecture Notes: Simple Harmonic Motion Introduction via a Horizontal Mass-Spring System
 Flipping Physics Lecture Ntes: Simple Harmnic Mtin Intrductin via a Hrizntal Mass-Spring System A Hrizntal Mass-Spring System is where a mass is attached t a spring, riented hrizntally, and then placed
Flipping Physics Lecture Ntes: Simple Harmnic Mtin Intrductin via a Hrizntal Mass-Spring System A Hrizntal Mass-Spring System is where a mass is attached t a spring, riented hrizntally, and then placed
Finding the Earth s magnetic field
 Labratry #6 Name: Phys 1402 - Dr. Cristian Bahrim Finding the Earth s magnetic field The thery accepted tday fr the rigin f the Earth s magnetic field is based n the mtin f the plasma (a miture f electrns
Labratry #6 Name: Phys 1402 - Dr. Cristian Bahrim Finding the Earth s magnetic field The thery accepted tday fr the rigin f the Earth s magnetic field is based n the mtin f the plasma (a miture f electrns
Chapter 3 Kinematics in Two Dimensions; Vectors
 Chapter 3 Kinematics in Tw Dimensins; Vectrs Vectrs and Scalars Additin f Vectrs Graphical Methds (One and Tw- Dimensin) Multiplicatin f a Vectr b a Scalar Subtractin f Vectrs Graphical Methds Adding Vectrs
Chapter 3 Kinematics in Tw Dimensins; Vectrs Vectrs and Scalars Additin f Vectrs Graphical Methds (One and Tw- Dimensin) Multiplicatin f a Vectr b a Scalar Subtractin f Vectrs Graphical Methds Adding Vectrs
AC Switch with Meter Installation Guide Overview
 AC Switch with Meter Installatin Guide AC Switch with Meter Installatin Guide Overview The SlarEdge Smart Energy Management slutins allw increasing the self-cnsumptin f a site. One methd used fr this purpse
AC Switch with Meter Installatin Guide AC Switch with Meter Installatin Guide Overview The SlarEdge Smart Energy Management slutins allw increasing the self-cnsumptin f a site. One methd used fr this purpse
Department of Economics, University of California, Davis Ecn 200C Micro Theory Professor Giacomo Bonanno. Insurance Markets
 Department f Ecnmics, University f alifrnia, Davis Ecn 200 Micr Thery Prfessr Giacm Bnann Insurance Markets nsider an individual wh has an initial wealth f. ith sme prbability p he faces a lss f x (0
Department f Ecnmics, University f alifrnia, Davis Ecn 200 Micr Thery Prfessr Giacm Bnann Insurance Markets nsider an individual wh has an initial wealth f. ith sme prbability p he faces a lss f x (0
Synchronous Motor V-Curves
 Synchrnus Mtr V-Curves 1 Synchrnus Mtr V-Curves Intrductin Synchrnus mtrs are used in applicatins such as textile mills where cnstant speed peratin is critical. Mst small synchrnus mtrs cntain squirrel
Synchrnus Mtr V-Curves 1 Synchrnus Mtr V-Curves Intrductin Synchrnus mtrs are used in applicatins such as textile mills where cnstant speed peratin is critical. Mst small synchrnus mtrs cntain squirrel
Plan o o. I(t) Divide problem into sub-problems Modify schematic and coordinate system (if needed) Write general equations
 Divide problem into sub-problems Modify schematic and coordinate system (if needed) Write general equations") STAPLE Physics 201 Name Final Exam May 14, 2013 This is a clsed bk examinatin but during the exam yu may refer t a 5 x7 nte card with wrds f wisdm yu have written n it. There is extra scratch paper available.
STAPLE Physics 201 Name Final Exam May 14, 2013 This is a clsed bk examinatin but during the exam yu may refer t a 5 x7 nte card with wrds f wisdm yu have written n it. There is extra scratch paper available.
Fall 2013 Physics 172 Recitation 3 Momentum and Springs
 Fall 03 Physics 7 Recitatin 3 Mmentum and Springs Purpse: The purpse f this recitatin is t give yu experience wrking with mmentum and the mmentum update frmula. Readings: Chapter.3-.5 Learning Objectives:.3.
Fall 03 Physics 7 Recitatin 3 Mmentum and Springs Purpse: The purpse f this recitatin is t give yu experience wrking with mmentum and the mmentum update frmula. Readings: Chapter.3-.5 Learning Objectives:.3.
Temperature sensor / Dual Temp+Humidity
 www.akcp.cm Temperature sensr / Dual Temp+Humidity Intrductin Temperature sensrs are imprtant where ptimum temperature cntrl is paramunt. If there is an air cnditining malfunctin r abnrmal weather cnditins,
www.akcp.cm Temperature sensr / Dual Temp+Humidity Intrductin Temperature sensrs are imprtant where ptimum temperature cntrl is paramunt. If there is an air cnditining malfunctin r abnrmal weather cnditins,
Lecture 5: Equilibrium and Oscillations
 Lecture 5: Equilibrium and Oscillatins Energy and Mtin Last time, we fund that fr a system with energy cnserved, v = ± E U m ( ) ( ) One result we see immediately is that there is n slutin fr velcity if
Lecture 5: Equilibrium and Oscillatins Energy and Mtin Last time, we fund that fr a system with energy cnserved, v = ± E U m ( ) ( ) One result we see immediately is that there is n slutin fr velcity if
Lab 1 The Scientific Method
 INTRODUCTION The fllwing labratry exercise is designed t give yu, the student, an pprtunity t explre unknwn systems, r universes, and hypthesize pssible rules which may gvern the behavir within them. Scientific
INTRODUCTION The fllwing labratry exercise is designed t give yu, the student, an pprtunity t explre unknwn systems, r universes, and hypthesize pssible rules which may gvern the behavir within them. Scientific
4 electron domains: 3 bonding and 1 non-bonding. 2 electron domains: 2 bonding and 0 non-bonding. 3 electron domains: 2 bonding and 1 non-bonding
 [4.3D VSEPR] pg. 1 f 7 Curriculum The use f VSEPR thery t predict the electrn dmain gemetry and the mlecular gemetry fr species with tw, three and fur electrn dmains. Shapes f species are determined by
[4.3D VSEPR] pg. 1 f 7 Curriculum The use f VSEPR thery t predict the electrn dmain gemetry and the mlecular gemetry fr species with tw, three and fur electrn dmains. Shapes f species are determined by
1 The limitations of Hartree Fock approximation
 Chapter: Pst-Hartree Fck Methds - I The limitatins f Hartree Fck apprximatin The n electrn single determinant Hartree Fck wave functin is the variatinal best amng all pssible n electrn single determinants
Chapter: Pst-Hartree Fck Methds - I The limitatins f Hartree Fck apprximatin The n electrn single determinant Hartree Fck wave functin is the variatinal best amng all pssible n electrn single determinants
NGSS High School Physics Domain Model
 NGSS High Schl Physics Dmain Mdel Mtin and Stability: Frces and Interactins HS-PS2-1: Students will be able t analyze data t supprt the claim that Newtn s secnd law f mtin describes the mathematical relatinship
NGSS High Schl Physics Dmain Mdel Mtin and Stability: Frces and Interactins HS-PS2-1: Students will be able t analyze data t supprt the claim that Newtn s secnd law f mtin describes the mathematical relatinship
UNIT 6 DETERMINATION OF FLASH AND FIRE POINT OF A LUBRICATING OIL BY OPEN CUP AND CLOSED CUP METHODS
 UNIT 6 DETERMINATION OF FLASH AND FIRE POINT OF A LUBRICATING OIL BY OPEN CUP AND CLOSED CUP METHODS Determinatin f Flash and Fire Pint f a Cup and Clsed Cup Structure 6. Intrductin Objectives 6. Experiment
UNIT 6 DETERMINATION OF FLASH AND FIRE POINT OF A LUBRICATING OIL BY OPEN CUP AND CLOSED CUP METHODS Determinatin f Flash and Fire Pint f a Cup and Clsed Cup Structure 6. Intrductin Objectives 6. Experiment
Chapters 29 and 35 Thermochemistry and Chemical Thermodynamics
 Chapters 9 and 35 Thermchemistry and Chemical Thermdynamics 1 Cpyright (c) 011 by Michael A. Janusa, PhD. All rights reserved. Thermchemistry Thermchemistry is the study f the energy effects that accmpany
Chapters 9 and 35 Thermchemistry and Chemical Thermdynamics 1 Cpyright (c) 011 by Michael A. Janusa, PhD. All rights reserved. Thermchemistry Thermchemistry is the study f the energy effects that accmpany
Editorial Calendar User Guide
 Editrial Calendar User Guide Table f Cntents Intrductin... 1 Permissins... 1 Navigatin & Views... 1 Navigatin Menu... 2 Mini Calendar... 2 Calendars in View... 3 Cntent Filtering... 4 Mnthly Calendar...
Editrial Calendar User Guide Table f Cntents Intrductin... 1 Permissins... 1 Navigatin & Views... 1 Navigatin Menu... 2 Mini Calendar... 2 Calendars in View... 3 Cntent Filtering... 4 Mnthly Calendar...
Sections 15.1 to 15.12, 16.1 and 16.2 of the textbook (Robbins-Miller) cover the materials required for this topic.
 cover the materials required for this topic.") Tpic : AC Fundamentals, Sinusidal Wavefrm, and Phasrs Sectins 5. t 5., 6. and 6. f the textbk (Rbbins-Miller) cver the materials required fr this tpic.. Wavefrms in electrical systems are current r vltage
Tpic : AC Fundamentals, Sinusidal Wavefrm, and Phasrs Sectins 5. t 5., 6. and 6. f the textbk (Rbbins-Miller) cver the materials required fr this tpic.. Wavefrms in electrical systems are current r vltage
AQA GCSE Physics. Topic 7: Magnetism and Electromagnetism. Notes. (Content in bold is for Higher Tier only)
") AQA GCSE Physics Tpic 7: Magnetism and Electrmagnetism Ntes (Cntent in bld is fr Higher Tier nly) Magnets - Nrth and Suth Ples - Same Ples repel - Oppsite ples attract Permanent Magnets - Always magnetic,
AQA GCSE Physics Tpic 7: Magnetism and Electrmagnetism Ntes (Cntent in bld is fr Higher Tier nly) Magnets - Nrth and Suth Ples - Same Ples repel - Oppsite ples attract Permanent Magnets - Always magnetic,
Section 6-2: Simplex Method: Maximization with Problem Constraints of the Form ~
 Sectin 6-2: Simplex Methd: Maximizatin with Prblem Cnstraints f the Frm ~ Nte: This methd was develped by Gerge B. Dantzig in 1947 while n assignment t the U.S. Department f the Air Frce. Definitin: Standard
Sectin 6-2: Simplex Methd: Maximizatin with Prblem Cnstraints f the Frm ~ Nte: This methd was develped by Gerge B. Dantzig in 1947 while n assignment t the U.S. Department f the Air Frce. Definitin: Standard
I. Analytical Potential and Field of a Uniform Rod. V E d. The definition of electric potential difference is
 Length L>>a,b,c Phys 232 Lab 4 Ch 17 Electric Ptential Difference Materials: whitebards & pens, cmputers with VPythn, pwer supply & cables, multimeter, crkbard, thumbtacks, individual prbes and jined prbes,
Length L>>a,b,c Phys 232 Lab 4 Ch 17 Electric Ptential Difference Materials: whitebards & pens, cmputers with VPythn, pwer supply & cables, multimeter, crkbard, thumbtacks, individual prbes and jined prbes,
A water level indicator or other measuring device to determine the current depth to the water.
 Fr Aqua4Plus 1.9.7 and later r Aqua4Plus Lite 2.1.1 r later. (Fr earlier versins r if using a PT2X with firmware lwer than 1.5, see Applicatin Nte 9C0152) Intrductin Purpse f this dcument is t prvide a
Fr Aqua4Plus 1.9.7 and later r Aqua4Plus Lite 2.1.1 r later. (Fr earlier versins r if using a PT2X with firmware lwer than 1.5, see Applicatin Nte 9C0152) Intrductin Purpse f this dcument is t prvide a
Thermodynamics and Equilibrium
 Thermdynamics and Equilibrium Thermdynamics Thermdynamics is the study f the relatinship between heat and ther frms f energy in a chemical r physical prcess. We intrduced the thermdynamic prperty f enthalpy,
Thermdynamics and Equilibrium Thermdynamics Thermdynamics is the study f the relatinship between heat and ther frms f energy in a chemical r physical prcess. We intrduced the thermdynamic prperty f enthalpy,
General Chemistry II, Unit I: Study Guide (part I)
") 1 General Chemistry II, Unit I: Study Guide (part I) CDS Chapter 14: Physical Prperties f Gases Observatin 1: Pressure- Vlume Measurements n Gases The spring f air is measured as pressure, defined as the
1 General Chemistry II, Unit I: Study Guide (part I) CDS Chapter 14: Physical Prperties f Gases Observatin 1: Pressure- Vlume Measurements n Gases The spring f air is measured as pressure, defined as the
Design and Simulation of Dc-Dc Voltage Converters Using Matlab/Simulink
 American Jurnal f Engineering Research (AJER) 016 American Jurnal f Engineering Research (AJER) e-issn: 30-0847 p-issn : 30-0936 Vlume-5, Issue-, pp-9-36 www.ajer.rg Research Paper Open Access Design and
American Jurnal f Engineering Research (AJER) 016 American Jurnal f Engineering Research (AJER) e-issn: 30-0847 p-issn : 30-0936 Vlume-5, Issue-, pp-9-36 www.ajer.rg Research Paper Open Access Design and
Tutorial 4: Parameter optimization
 SRM Curse 2013 Tutrial 4 Parameters Tutrial 4: Parameter ptimizatin The aim f this tutrial is t prvide yu with a feeling f hw a few f the parameters that can be set n a QQQ instrument affect SRM results.
SRM Curse 2013 Tutrial 4 Parameters Tutrial 4: Parameter ptimizatin The aim f this tutrial is t prvide yu with a feeling f hw a few f the parameters that can be set n a QQQ instrument affect SRM results.
RECENT studies undertaken in this Institute on the crystal structure
 522 Structural similarities f sme secndary lead minerals By L. FANFANI and P. F. ZANAZZI Istitut di Mineralgia dell 'Universita di Perugia, Perugia (Italy) [Taken as read 2 Nvember 1967] Summary. Sme structural
522 Structural similarities f sme secndary lead minerals By L. FANFANI and P. F. ZANAZZI Istitut di Mineralgia dell 'Universita di Perugia, Perugia (Italy) [Taken as read 2 Nvember 1967] Summary. Sme structural
Relativity Integration Points Guide. July 3, 2018 Version
 Relativity Integratin Pints Guide July 3, 2018 Versin 9.6.50.31 Fr the mst recent versin f this dcument, visit ur dcumentatin website. Table f Cntents 1 Relativity Integratin Pints 4 1.1 Integratin Pints
Relativity Integratin Pints Guide July 3, 2018 Versin 9.6.50.31 Fr the mst recent versin f this dcument, visit ur dcumentatin website. Table f Cntents 1 Relativity Integratin Pints 4 1.1 Integratin Pints
Physics 2B Chapter 23 Notes - Faraday s Law & Inductors Spring 2018
 Michael Faraday lived in the Lndn area frm 1791 t 1867. He was 29 years ld when Hand Oersted, in 1820, accidentally discvered that electric current creates magnetic field. Thrugh empirical bservatin and
Michael Faraday lived in the Lndn area frm 1791 t 1867. He was 29 years ld when Hand Oersted, in 1820, accidentally discvered that electric current creates magnetic field. Thrugh empirical bservatin and
ENG2410 Digital Design Sequential Circuits: Part B
 ENG24 Digital Design Sequential Circuits: Part B Fall 27 S. Areibi Schl f Engineering University f Guelph Analysis f Sequential Circuits Earlier we learned hw t analyze cmbinatinal circuits We will extend
ENG24 Digital Design Sequential Circuits: Part B Fall 27 S. Areibi Schl f Engineering University f Guelph Analysis f Sequential Circuits Earlier we learned hw t analyze cmbinatinal circuits We will extend
CHAPTER 24: INFERENCE IN REGRESSION. Chapter 24: Make inferences about the population from which the sample data came.
 MATH 1342 Ch. 24 April 25 and 27, 2013 Page 1 f 5 CHAPTER 24: INFERENCE IN REGRESSION Chapters 4 and 5: Relatinships between tw quantitative variables. Be able t Make a graph (scatterplt) Summarize the
MATH 1342 Ch. 24 April 25 and 27, 2013 Page 1 f 5 CHAPTER 24: INFERENCE IN REGRESSION Chapters 4 and 5: Relatinships between tw quantitative variables. Be able t Make a graph (scatterplt) Summarize the
Multiple Source Multiple. using Network Coding
 Multiple Surce Multiple Destinatin Tplgy Inference using Netwrk Cding Pegah Sattari EECS, UC Irvine Jint wrk with Athina Markpulu, at UCI, Christina Fraguli, at EPFL, Lausanne Outline Netwrk Tmgraphy Gal,
Multiple Surce Multiple Destinatin Tplgy Inference using Netwrk Cding Pegah Sattari EECS, UC Irvine Jint wrk with Athina Markpulu, at UCI, Christina Fraguli, at EPFL, Lausanne Outline Netwrk Tmgraphy Gal,
IntesisBox MH-RC-KNX-1i v1.1. User's Manual Issue Date: 08/2013 r2.0 eng
 IntesisBx MH-RC-KNX-1i v1.1 User's Manual Issue Date: 08/2013 r2.0 eng IntesisBx KNX Mitsubishi Heavy Industries A.C. Intesis Sftware S.L. All Rights Reserved. Infrmatin in this dcument is subject t change
IntesisBx MH-RC-KNX-1i v1.1 User's Manual Issue Date: 08/2013 r2.0 eng IntesisBx KNX Mitsubishi Heavy Industries A.C. Intesis Sftware S.L. All Rights Reserved. Infrmatin in this dcument is subject t change
CLASS. Fractions and Angles. Teacher Report. No. of test takers: 25. School Name: EI School. City: Ahmedabad CLASS 6 B 8709
 SEPTEMBER 07 Math Fractins and Angles CLASS 6 Teacher Reprt Test Taken 4 5 6 7 8 Schl Name: EI Schl City: Ahmedabad CLASS SECTION EXAM CODE 6 B 8709 N. f test takers: 5 6.5 Average.5 9.0 Range (Scres are
SEPTEMBER 07 Math Fractins and Angles CLASS 6 Teacher Reprt Test Taken 4 5 6 7 8 Schl Name: EI Schl City: Ahmedabad CLASS SECTION EXAM CODE 6 B 8709 N. f test takers: 5 6.5 Average.5 9.0 Range (Scres are
Supplementary Course Notes Adding and Subtracting AC Voltages and Currents
 Supplementary Curse Ntes Adding and Subtracting AC Vltages and Currents As mentined previusly, when cmbining DC vltages r currents, we nly need t knw the plarity (vltage) and directin (current). In the
Supplementary Curse Ntes Adding and Subtracting AC Vltages and Currents As mentined previusly, when cmbining DC vltages r currents, we nly need t knw the plarity (vltage) and directin (current). In the
CEE3430 Engineering Hydrology HEC HMS Bare Essentials Tutorial and Example
 CEE3430 Engineering Hydrlgy HEC HMS Bare Essentials Tutrial and Example Margaret Matter and David Tarbtn February 2010 This tutrial prvides sme bare essentials step by step guidance n starting t use HEC
CEE3430 Engineering Hydrlgy HEC HMS Bare Essentials Tutrial and Example Margaret Matter and David Tarbtn February 2010 This tutrial prvides sme bare essentials step by step guidance n starting t use HEC
Module 4: General Formulation of Electric Circuit Theory
 Mdule 4: General Frmulatin f Electric Circuit Thery 4. General Frmulatin f Electric Circuit Thery All electrmagnetic phenmena are described at a fundamental level by Maxwell's equatins and the assciated
Mdule 4: General Frmulatin f Electric Circuit Thery 4. General Frmulatin f Electric Circuit Thery All electrmagnetic phenmena are described at a fundamental level by Maxwell's equatins and the assciated
AP Physics. Summer Assignment 2012 Date. Name. F m = = + What is due the first day of school? a. T. b. = ( )( ) =
( ) =") P Physics Name Summer ssignment 0 Date I. The P curriculum is extensive!! This means we have t wrk at a fast pace. This summer hmewrk will allw us t start n new Physics subject matter immediately when
P Physics Name Summer ssignment 0 Date I. The P curriculum is extensive!! This means we have t wrk at a fast pace. This summer hmewrk will allw us t start n new Physics subject matter immediately when
Bootstrap Method > # Purpose: understand how bootstrap method works > obs=c(11.96, 5.03, 67.40, 16.07, 31.50, 7.73, 11.10, 22.38) > n=length(obs) >
 > n=length(obs) >") Btstrap Methd > # Purpse: understand hw btstrap methd wrks > bs=c(11.96, 5.03, 67.40, 16.07, 31.50, 7.73, 11.10, 22.38) > n=length(bs) > mean(bs) [1] 21.64625 > # estimate f lambda > lambda = 1/mean(bs);
Btstrap Methd > # Purpse: understand hw btstrap methd wrks > bs=c(11.96, 5.03, 67.40, 16.07, 31.50, 7.73, 11.10, 22.38) > n=length(bs) > mean(bs) [1] 21.64625 > # estimate f lambda > lambda = 1/mean(bs);
IntesisBox PA-AC-KNX-1i v1.2
 IntesisBx PA-AC-KNX-1i v1.2 User's Manual Issue Date: 15/02/2012 r3 eng IntesisBx KNX - Panasnic A.C. (Etherea line) Intesis Sftware S.L. All Rights Reserved. Infrmatin in this dcument is subject t change
IntesisBx PA-AC-KNX-1i v1.2 User's Manual Issue Date: 15/02/2012 r3 eng IntesisBx KNX - Panasnic A.C. (Etherea line) Intesis Sftware S.L. All Rights Reserved. Infrmatin in this dcument is subject t change