SIMULATION SUITE CHEMCAD SOFTWARE PROCESS CONTROL SYSTEMS PROCESS CONTROL SYSTEMS COURSE WITH CHEMCAD MODELS. Application > Design > Adjustment
|
|
|
- Earl Austin Cole
- 5 years ago
- Views:
Transcription

1 COURSE WITH CHEMCAD MODELS PROCESS CONTROL SYSTEMS Application > Design > Adjustment Based on F.G. Shinskey s 1967 Edition Presenter John Edwards P & I Design Ltd, UK Contact: jee@pidesign.co.uk
2 COURSE OBJECTIVES REVIEW Course Objectives are to study Feedback Control and Control Loop Structure Multiple Control Loops Appreciation of Basic Instrumentation Controller Equations and Control Modes Control Loop Behaviour Control Valve Types - Flow Characteristics - Actions CHEMCAD SIMULATION SOFTWARE SUITE Control Loop Dynamics - Dead Time Capacity Resistance Appreciation of Behaviour of Common Control Loops CHEMCAD Control Models Control Loop Tuning
")

 Set")

3 FEEDBACK CONTROL PROCESS Controlled Variable (c) INCREASES IMBALANCE CONTROL RUNAWAY Manipulated Variable (m) CONTROLLER Error (e) Set Point (r) SIMULATION r c SUITE e = ± RESTORES BALANCE CONTROL STABILITY
4 CONTROL LOOP STRUCTURE FUNCTIONS & SIGNALS MEASURE Thermocouple mv Resistance bulb Ω Transmitter 4-20 ma Transmitter bar LOCATIONS & TAGGING TT 01 Field Mounted LOOP SCHEMATIC CONVERT CONTROL Characterise Measurement Linear 4-20 ma Signal 4-20 ma Signal Thermocouple Curve (mv/i) Square Root Extraction ( ) Pneumatic to Current (I/P) X Y01 c e CHEMCAD SIMULATION XI Control SOFTWARE SUITE 4-20 ma XIC 01 C01 Equipment Room Room Signal Converter Measurement Transmitter 0-100ºC TT 01 XY 01 r 4-20 ma Controller 0-100ºC Control Valve Thyristor CV 01 m 4-20 ma CONTROL DEVICE Valve Actuator 4-20 ma I/P 4-20 ma to bar Valve Actuator bar Positioner bar C V 01 Field Mounted
5 MULTIPLE CONTROL LOOPS Single Cascade Ch6, Secondary p154 Primary RatioCh6, p160 Wild Controlled Auto SelectCh6, p167 Squeaky wheel gets the grease AdaptiveCh6, p170 PID Adjust Tx Tx Tx FT FT Tx Tx Tx XIC XIC Primary Ratio RR XIC XIC XIC XIC XIC Secondary Hi Lo Select FIC < or > CHEMCAD SIMULATION SOFTWARE SUITE XIC CV CV CV CV CV CV Single Valve Split Range Valves Ratio of controlled flow to wild flow Auto selection of controlled variable Adapts - models needs of process




6 TYPICAL INSTRUMENTATION PV Process Variable Controller SV Set Point Measurement Transmitters (4 to 20 ma dc) Temperature Flow Pressure Level

7 THERMOCOUPLE DATA Industrial CHEMCAD SIMULATION SOFTWARE SUITE Surface Reference Thermo Electric Company Sanitary

8 RESISTANCE BULB DATA Industrial CHEMCAD SIMULATION SOFTWARE SUITE Surface Reference Thermo Electric Company Sanitary

9 TEMPERATURE HEAD TRANSMITTERS Reference Endress + Hauser
 dm/dt = e/r R dm/dt Never set R faster than process τ +")
10 CONTROLLER MODES & EQUATIONS Proportional (P) 100 m = e + P b P = PB % b =output bias m = b for e = 0 e = r ± Gain = c 100 Proportional + Integral (PI) m = e + edt P R SIMULATION P SUITE P Gain Decreasing P Increases m R = integral time (min) dm/dt = e/r R dm/dt Never set R faster than process τ + τ d
11 CONTROLLER MODES & EQUATIONS Proportional + Derivative (PD) 100 de m = e + D + b P dt D =derivative time (min) Note D dm/dt Use D when sustained error End point control: ph target temperature Proportional + Integral + Derivative (PID) 3Mode m = e + edt + P R CHEMCAD SIMULATION SOFTWARE SUITE de D dt Low R on fast processes: Flow Liquid Pressure High R on slow processes: Batch reactor temperature Never D on noisy processes: Flow Level Liquid Pressure

12 DYNAMIC SIMULATION CHEMCAD CONTROLLER SET UP LEVEL MEASUREMENT LINEAR 0.5 to 4.5 metre SIGNAL 4.0 to 20 ma INC LEVEL INC SIGNAL CONTROLLER ACTION DIRECT INC LEVEL INC OUTPUT CHEMCAD SIMULATION SOFTWARE SUITE FAIL CLOSED VALVE ON OUTLET (OPENS) FAIL OPEN VALVE ON INLET (CLOSES)
 70 60 50 40 30 20 10")
 BUTTERFLY VALVE LINEAR EQUAL PERCENTAGE QUICK")
13 CONTROL VALVE CHARACTERISTICS 100 ANY CHARACTERISTIC QUICK OPENING CHARACTERISTIC VALVE STROKE (%) VALVE 0 POSITIONER FLOW % VALVE COEFFICIENT (C v ) BUTTERFLY VALVE LINEAR EQUAL PERCENTAGE QUICK OPENING


14 CONTROL VALVE CHARACTERISTICS FISHER EASY E GLOBE VALVE SIZING COEFFICIENTS SIZE Cv Quick Opening Cv Equal %


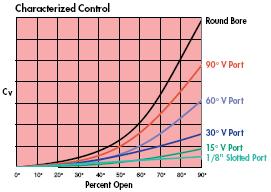
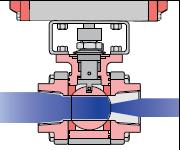
15 CONTROL VALVE CHARACTERISTICS Flow-Tek Vee Ball
16 CONTROL VALVE CALIBRATION-ACTION SINGLE CONTROL VALVE OPERATIONS CONTROL OUTPUT COEFFICIENTS ACTION FAIL CLOSED POSITION STATE LOGIC EQUATION ma % A v B v 4 0 Closed 0 0 = 4A v +B v Open 1 1 = 20A v +B v FAIL OPEN Open V a l v e Fail Open Signal to Close 4 0 Open 1 1 = 4A v +B v Closed 0 0 = 20A v +B v Cooling Valve A v = B v = 1.25 CHEMCAD SIMULATION SOFTWARE SUITE Heating Valve A v = B v = Fail Closed Signal to Open Open V a l v e Closed 4 20 Controller Output (ma) 4 Controller Output (ma) Closed 20 A v and B v are CHEMCAD scaling constants
17 CONTROL VALVE CALIBRATION-ACTION DUAL CONTROL VALVE OPERATIONS IN SPLIT RANGE ACTION CONTROL OUTPUT POSITION STATE LOGIC EQUATION COEFFICIENTS ma % A v B v FAIL CLOSED Closed 0 0 = 12A v +B v Open 1 1 = 20A v +B v FAIL OPEN 4 0 Open 1 1 = 4A v +B v Closed 0 0 = 12A v +B v Open V a l v e Closed 4 A v = B v = 1.5 Split Range Valves A CHEMCAD SIMULATION v = A A v = SOFTWARE SUITE v = B = -1.5 Open B = 1.25 B = v v v 3 Way Valve Controller Output (ma) V a l v e Closed 4 A v and B v are CHEMCAD scaling constants Controller Output (ma)


18 DYNAMIC SIMULATION CHEMCAD CONTROL VALVE SETTINGS CHEMCAD SIMULATION SOFTWARE SUITE Fail Closed Signal to Open
19 PROPERTIES OF COMMON LOOPS COMMON LOOP CHARACTERISTICS & TUNING PARAMETER RANGES Ch3, Table 3.3 PARAMETER CHARACTERISTIC P (%) I (min) D (min) FLOW FAST - NOISY NO PRESSURE (LIQUID) FAST - NOISY NO COMPOSITION (GAS) FAST - NOISY NO LEVEL SLOW FAST - NOISY SOMETIMES NO TEMPERATURE SLOW - STEADY I/4 < D > I/2 COMPOSITION (LIQUID) SLOW - STEADY I/4 < D > I/2 PRESSURE (GAS) SLOW - STEADY 1-5 UNNECCESSARY UNNECCESSARY CHEMCAD SIMULATION SOFTWARE SUITE VAPOR PRESSURE SLOW - STEADY I/4 < D > I/2 CONTROL MODES P (%) T i (min) T d (min) P 2 Pu P + I 2.2 Pu T u / 1.2 P + I + D 1.6 Pu T u / 2.0 T u / 8.0 = T i /4 P u measurement starts to oscillate at constant amplitude T u for small SP changes

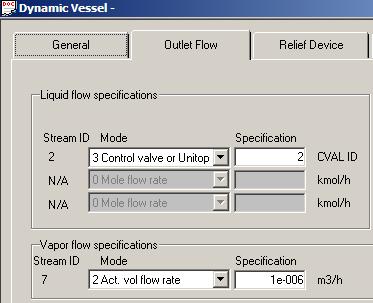
20 DYNAMIC SIMULATION CHEMCAD DYNAMIC VESSEL SETTINGS

21 CONTROL OF DEAD TIME Ch1-p6

22 CAPACITY TANK LEVEL Ch1-p18 Tank Level m SIMULATION Run Time min SUITE

23 CAPACITY TANK LEVEL SELF REGULATE Ch1-p18 τ 1 = V Fk Tank Level m Flow Change 15 to 20 m 3 /h τ 1 Run Time min CHEMCAD SIMULATION SOFTWARE SUITE Fixed Position 47.5% Off

24 DYNAMIC SIMULATION TANK BALANCING HYDRAULICS Ch3-p71 Period is function of wetted surface length only τ = 2π 0 L1+ L 2g Throttling displacer valves reduces amplitude allowing narrower PB 2 0.5

25 DISPLACER TANK LEVEL CONTROL

26 TANK LEVEL CONTROLLER TUNING

27 GAS PRESSURE CONTROL Ch3-p68

28 FLOW CONTROLLER TUNING
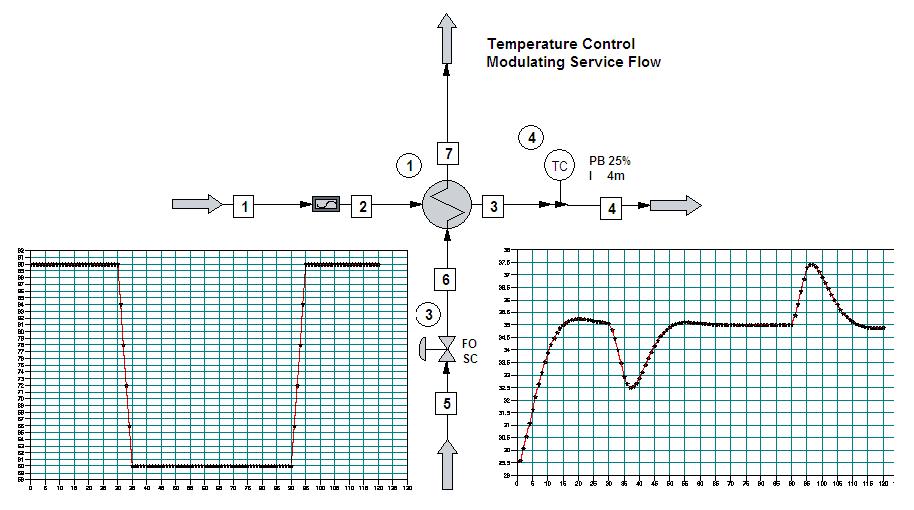
29 TEMPERATURE CONTROL

30 BYPASS TEMPERATURE CONTROL Ch9-p234
31 DYNAMIC SIMULATION TRAINING SIMULATOR CHEMCAD MODEL

32 DYNAMIC SIMULATION TRAINING SIMULATOR OTS SETTINGS CHEMCAD SIMULATION SOFTWARE SUITE Real Time Step 1.0m Simulation Time 0.1m

33 DYNAMIC SIMULATION TRAINING SIMULATOR GUI
Process Control & Design
 458.308 Process Control & Design Lecture 5: Feedback Control System Jong Min Lee Chemical & Biomolecular Engineering Seoul National University 1 / 29 Feedback Control Scheme: The Continuous Blending Process.1
458.308 Process Control & Design Lecture 5: Feedback Control System Jong Min Lee Chemical & Biomolecular Engineering Seoul National University 1 / 29 Feedback Control Scheme: The Continuous Blending Process.1
TS02 - Pre-Instructional Survey
 TS02 - Pre-Instructional Survey 1. Which type of drawing provides detailed piping and process information, including wire terminations? a. Loop Wiring Diagrams b. Piping and Instrument Diagrams (P&IDs)
TS02 - Pre-Instructional Survey 1. Which type of drawing provides detailed piping and process information, including wire terminations? a. Loop Wiring Diagrams b. Piping and Instrument Diagrams (P&IDs)
Process Control J.P. CORRIOU. Reaction and Process Engineering Laboratory University of Lorraine-CNRS, Nancy (France) Zhejiang University 2016
 Zhejiang University 2016") Process Control J.P. CORRIOU Reaction and Process Engineering Laboratory University of Lorraine-CNRS, Nancy (France) Zhejiang University 206 J.P. Corriou (LRGP) Process Control Zhejiang University 206
Process Control J.P. CORRIOU Reaction and Process Engineering Laboratory University of Lorraine-CNRS, Nancy (France) Zhejiang University 206 J.P. Corriou (LRGP) Process Control Zhejiang University 206
Process Control, 3P4 Assignment 6
 Process Control, 3P4 Assignment 6 Kevin Dunn, kevin.dunn@mcmaster.ca Due date: 28 March 204 This assignment gives you practice with cascade control and feedforward control. Question [0 = 6 + 4] The outlet
Process Control, 3P4 Assignment 6 Kevin Dunn, kevin.dunn@mcmaster.ca Due date: 28 March 204 This assignment gives you practice with cascade control and feedforward control. Question [0 = 6 + 4] The outlet
PROCESS CONTROL (IT62) SEMESTER: VI BRANCH: INSTRUMENTATION TECHNOLOGY
 SEMESTER: VI BRANCH: INSTRUMENTATION TECHNOLOGY") PROCESS CONTROL (IT62) SEMESTER: VI BRANCH: INSTRUMENTATION TECHNOLOGY by, Dr. Mallikarjun S. Holi Professor & Head Department of Biomedical Engineering Bapuji Institute of Engineering & Technology Davangere-577004
PROCESS CONTROL (IT62) SEMESTER: VI BRANCH: INSTRUMENTATION TECHNOLOGY by, Dr. Mallikarjun S. Holi Professor & Head Department of Biomedical Engineering Bapuji Institute of Engineering & Technology Davangere-577004
Chapter 8. Feedback Controllers. Figure 8.1 Schematic diagram for a stirred-tank blending system.
 Feedback Controllers Figure 8.1 Schematic diagram for a stirred-tank blending system. 1 Basic Control Modes Next we consider the three basic control modes starting with the simplest mode, proportional
Feedback Controllers Figure 8.1 Schematic diagram for a stirred-tank blending system. 1 Basic Control Modes Next we consider the three basic control modes starting with the simplest mode, proportional
Innovative Solutions from the Process Control Professionals
 Control Station Innovative Solutions from the Process Control Professionals Software For Process Control Analysis, Tuning & Training Control Station Software For Process Control Analysis, Tuning & Training
Control Station Innovative Solutions from the Process Control Professionals Software For Process Control Analysis, Tuning & Training Control Station Software For Process Control Analysis, Tuning & Training
CHAPTER 7 MODELING AND CONTROL OF SPHERICAL TANK LEVEL PROCESS 7.1 INTRODUCTION
 141 CHAPTER 7 MODELING AND CONTROL OF SPHERICAL TANK LEVEL PROCESS 7.1 INTRODUCTION In most of the industrial processes like a water treatment plant, paper making industries, petrochemical industries,
141 CHAPTER 7 MODELING AND CONTROL OF SPHERICAL TANK LEVEL PROCESS 7.1 INTRODUCTION In most of the industrial processes like a water treatment plant, paper making industries, petrochemical industries,
Class 27: Block Diagrams
 Class 7: Block Diagrams Dynamic Behavior and Stability of Closed-Loop Control Systems We no ant to consider the dynamic behavior of processes that are operated using feedback control. The combination of
Class 7: Block Diagrams Dynamic Behavior and Stability of Closed-Loop Control Systems We no ant to consider the dynamic behavior of processes that are operated using feedback control. The combination of
Analyzing Control Problems and Improving Control Loop Performance
 OptiControls Inc. Houston, TX Ph: 713-459-6291 www.opticontrols.com info@opticontrols.com Analyzing Control s and Improving Control Loop Performance -by Jacques F. Smuts Page: 1 Presenter Principal Consultant
OptiControls Inc. Houston, TX Ph: 713-459-6291 www.opticontrols.com info@opticontrols.com Analyzing Control s and Improving Control Loop Performance -by Jacques F. Smuts Page: 1 Presenter Principal Consultant
CHAPTER 13: FEEDBACK PERFORMANCE
 When I complete this chapter, I want to be able to do the following. Apply two methods for evaluating control performance: simulation and frequency response Apply general guidelines for the effect of -
When I complete this chapter, I want to be able to do the following. Apply two methods for evaluating control performance: simulation and frequency response Apply general guidelines for the effect of -
Fundamental Principles of Process Control
 Fundamental Principles of Process Control Motivation for Process Control Safety First: people, environment, equipment The Profit Motive: meeting final product specs minimizing waste production minimizing
Fundamental Principles of Process Control Motivation for Process Control Safety First: people, environment, equipment The Profit Motive: meeting final product specs minimizing waste production minimizing
Solutions for Tutorial 10 Stability Analysis
 Solutions for Tutorial 1 Stability Analysis 1.1 In this question, you will analyze the series of three isothermal CSTR s show in Figure 1.1. The model for each reactor is the same at presented in Textbook
Solutions for Tutorial 1 Stability Analysis 1.1 In this question, you will analyze the series of three isothermal CSTR s show in Figure 1.1. The model for each reactor is the same at presented in Textbook
CHAPTER 10: STABILITY &TUNING
 When I complete this chapter, I want to be able to do the following. Determine the stability of a process without control Determine the stability of a closed-loop feedback control system Use these approaches
When I complete this chapter, I want to be able to do the following. Determine the stability of a process without control Determine the stability of a closed-loop feedback control system Use these approaches
Design of de-coupler for an interacting tanks system
 IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE) e-issn: 78-1676,p-ISSN: 3-3331, Volume 7, Issue 4 (Sep. - Oct. 13), PP 48-53 Design of de-coupler for an interacting tanks system Parag
IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE) e-issn: 78-1676,p-ISSN: 3-3331, Volume 7, Issue 4 (Sep. - Oct. 13), PP 48-53 Design of de-coupler for an interacting tanks system Parag
Principles and Practice of Automatic Process Control
 Principles and Practice of Automatic Process Control Third Edition Carlos A. Smith, Ph.D., P.E. Department of Chemical Engineering University of South Florida Armando B. Corripio, Ph.D., P.E. Gordon A.
Principles and Practice of Automatic Process Control Third Edition Carlos A. Smith, Ph.D., P.E. Department of Chemical Engineering University of South Florida Armando B. Corripio, Ph.D., P.E. Gordon A.
CPC Engineering Training Brochure
 Training Brochure Module 1: Field Instrumentation for the Process Industry None Understanding of measurement principles Understanding of development of instrument specification Understanding criteria for
Training Brochure Module 1: Field Instrumentation for the Process Industry None Understanding of measurement principles Understanding of development of instrument specification Understanding criteria for
CHAPTER 15: FEEDFORWARD CONTROL
 CHAPER 5: EEDORWARD CONROL When I complete this chapter, I want to be able to do the following. Identify situations for which feedforward is a good control enhancement Design feedforward control using
CHAPER 5: EEDORWARD CONROL When I complete this chapter, I want to be able to do the following. Identify situations for which feedforward is a good control enhancement Design feedforward control using
Enhanced Single-Loop Control Strategies (Advanced Control) Cascade Control Time-Delay Compensation Inferential Control Selective and Override Control
 Cascade Control Time-Delay Compensation Inferential Control Selective and Override Control") Enhanced Single-Loop Control Strategies (Advanced Control) Cascade Control Time-Delay Compensation Inferential Control Selective and Override Control 1 Cascade Control A disadvantage of conventional feedback
Enhanced Single-Loop Control Strategies (Advanced Control) Cascade Control Time-Delay Compensation Inferential Control Selective and Override Control 1 Cascade Control A disadvantage of conventional feedback
Control Introduction. Gustaf Olsson IEA Lund University.
 Control Introduction Gustaf Olsson IEA Lund University Gustaf.Olsson@iea.lth.se Lecture 3 Dec Nonlinear and linear systems Aeration, Growth rate, DO saturation Feedback control Cascade control Manipulated
Control Introduction Gustaf Olsson IEA Lund University Gustaf.Olsson@iea.lth.se Lecture 3 Dec Nonlinear and linear systems Aeration, Growth rate, DO saturation Feedback control Cascade control Manipulated
Subject: Introduction to Process Control. Week 01, Lectures 01 02, Spring Content
 v CHEG 461 : Process Dynamics and Control Subject: Introduction to Process Control Week 01, Lectures 01 02, Spring 2014 Dr. Costas Kiparissides Content 1. Introduction to Process Dynamics and Control 2.
v CHEG 461 : Process Dynamics and Control Subject: Introduction to Process Control Week 01, Lectures 01 02, Spring 2014 Dr. Costas Kiparissides Content 1. Introduction to Process Dynamics and Control 2.
A Tuning of the Nonlinear PI Controller and Its Experimental Application
 Korean J. Chem. Eng., 18(4), 451-455 (2001) A Tuning of the Nonlinear PI Controller and Its Experimental Application Doe Gyoon Koo*, Jietae Lee*, Dong Kwon Lee**, Chonghun Han**, Lyu Sung Gyu, Jae Hak
Korean J. Chem. Eng., 18(4), 451-455 (2001) A Tuning of the Nonlinear PI Controller and Its Experimental Application Doe Gyoon Koo*, Jietae Lee*, Dong Kwon Lee**, Chonghun Han**, Lyu Sung Gyu, Jae Hak
CONTROLLER PERFORMANCE ASSESSMENT IN SET POINT TRACKING AND REGULATORY CONTROL
 ADCHEM 2, Pisa Italy June 14-16 th 2 CONTROLLER PERFORMANCE ASSESSMENT IN SET POINT TRACKING AND REGULATORY CONTROL N.F. Thornhill *, S.L. Shah + and B. Huang + * Department of Electronic and Electrical
ADCHEM 2, Pisa Italy June 14-16 th 2 CONTROLLER PERFORMANCE ASSESSMENT IN SET POINT TRACKING AND REGULATORY CONTROL N.F. Thornhill *, S.L. Shah + and B. Huang + * Department of Electronic and Electrical
EXAMINATION INFORMATION PAGE Written examination
 EXAMINATION INFORMATION PAGE Written examination Course code: Course name: PEF3006 Process Control Examination date: 30 November 2018 Examination time from/to: 09:00-13:00 Total hours: 4 Responsible course
EXAMINATION INFORMATION PAGE Written examination Course code: Course name: PEF3006 Process Control Examination date: 30 November 2018 Examination time from/to: 09:00-13:00 Total hours: 4 Responsible course
Enhanced Single-Loop Control Strategies Chapter 16
 Enhanced Single-Loop Control Strategies Chapter 16 1. Cascade control 2. Time-delay compensation 3. Inferential control 4. Selective and override control 5. Nonlinear control 6. Adaptive control 1 Chapter
Enhanced Single-Loop Control Strategies Chapter 16 1. Cascade control 2. Time-delay compensation 3. Inferential control 4. Selective and override control 5. Nonlinear control 6. Adaptive control 1 Chapter
(Refer Slide Time: 1:42)
") Control Engineering Prof. Madan Gopal Department of Electrical Engineering Indian Institute of Technology, Delhi Lecture - 21 Basic Principles of Feedback Control (Contd..) Friends, let me get started
Control Engineering Prof. Madan Gopal Department of Electrical Engineering Indian Institute of Technology, Delhi Lecture - 21 Basic Principles of Feedback Control (Contd..) Friends, let me get started
Subject: BT6008 Process Measurement and Control. The General Control System
 WALJAT COLLEGES OF APPLIED SCIENCES In academic partnership with BIRLA INSTITUTE OF TECHNOLOGY Question Bank Course: Biotechnology Session: 005-006 Subject: BT6008 Process Measurement and Control Semester:
WALJAT COLLEGES OF APPLIED SCIENCES In academic partnership with BIRLA INSTITUTE OF TECHNOLOGY Question Bank Course: Biotechnology Session: 005-006 Subject: BT6008 Process Measurement and Control Semester:
Chapter 7 Control. Part Classical Control. Mobile Robotics - Prof Alonzo Kelly, CMU RI
 Chapter 7 Control 7.1 Classical Control Part 1 1 7.1 Classical Control Outline 7.1.1 Introduction 7.1.2 Virtual Spring Damper 7.1.3 Feedback Control 7.1.4 Model Referenced and Feedforward Control Summary
Chapter 7 Control 7.1 Classical Control Part 1 1 7.1 Classical Control Outline 7.1.1 Introduction 7.1.2 Virtual Spring Damper 7.1.3 Feedback Control 7.1.4 Model Referenced and Feedforward Control Summary
: INSTRUMENTATION AND PROCESS CONTROL COURSE CODE : 6071 COURSE CATEGORY : A PERIODS/ WEEK : 5 PERIODS/ SEMESTER : 75 CREDIT : 5 TIME SCHEDULE
 COURSE TITLE : INSTRUMENTATION AND PROCESS CONTROL COURSE CODE : 6071 COURSE CATEGORY : A PERIODS/ WEEK : 5 PERIODS/ SEMESTER : 75 CREDIT : 5 TIME SCHEDULE MODULE TOPIC PERIODS 1 Measuring Instruments
COURSE TITLE : INSTRUMENTATION AND PROCESS CONTROL COURSE CODE : 6071 COURSE CATEGORY : A PERIODS/ WEEK : 5 PERIODS/ SEMESTER : 75 CREDIT : 5 TIME SCHEDULE MODULE TOPIC PERIODS 1 Measuring Instruments
Overview of Control System Design
 Overview of Control System Design General Requirements 1. Safety. It is imperative that industrial plants operate safely so as to promote the well-being of people and equipment within the plant and in
Overview of Control System Design General Requirements 1. Safety. It is imperative that industrial plants operate safely so as to promote the well-being of people and equipment within the plant and in
Process Solutions. Process Dynamics. The Fundamental Principle of Process Control. APC Techniques Dynamics 2-1. Page 2-1
 Process Dynamics The Fundamental Principle of Process Control APC Techniques Dynamics 2-1 Page 2-1 Process Dynamics (1) All Processes are dynamic i.e. they change with time. If a plant were totally static
Process Dynamics The Fundamental Principle of Process Control APC Techniques Dynamics 2-1 Page 2-1 Process Dynamics (1) All Processes are dynamic i.e. they change with time. If a plant were totally static
Process Control Hardware Fundamentals
 Unit-1: Process Control Process Control Hardware Fundamentals In order to analyse a control system, the individual components that make up the system must be understood. Only with this understanding can
Unit-1: Process Control Process Control Hardware Fundamentals In order to analyse a control system, the individual components that make up the system must be understood. Only with this understanding can
Solution to exam in PEF3006 Process Control at Telemark University College
 Solution to exam in PEF3006 Process Control at Telemark University College Exam date: 7. December 2015. Duration: 4 hours. Weight in final grade of the course: 100%. Teacher: Finn Aakre Haugen (finn.haugen@hit.no).
Solution to exam in PEF3006 Process Control at Telemark University College Exam date: 7. December 2015. Duration: 4 hours. Weight in final grade of the course: 100%. Teacher: Finn Aakre Haugen (finn.haugen@hit.no).
Distributed Parameter Systems
 Distributed Parameter Systems Introduction All the apparatus dynamic experiments in the laboratory exhibit the effect known as "minimum phase dynamics". Process control loops are often based on simulations
Distributed Parameter Systems Introduction All the apparatus dynamic experiments in the laboratory exhibit the effect known as "minimum phase dynamics". Process control loops are often based on simulations
Feedback Control of Linear SISO systems. Process Dynamics and Control
 Feedback Control of Linear SISO systems Process Dynamics and Control 1 Open-Loop Process The study of dynamics was limited to open-loop systems Observe process behavior as a result of specific input signals
Feedback Control of Linear SISO systems Process Dynamics and Control 1 Open-Loop Process The study of dynamics was limited to open-loop systems Observe process behavior as a result of specific input signals
CM 3310 Process Control, Spring Lecture 21
 CM 331 Process Control, Spring 217 Instructor: Dr. om Co Lecture 21 (Back to Process Control opics ) General Control Configurations and Schemes. a) Basic Single-Input/Single-Output (SISO) Feedback Figure
CM 331 Process Control, Spring 217 Instructor: Dr. om Co Lecture 21 (Back to Process Control opics ) General Control Configurations and Schemes. a) Basic Single-Input/Single-Output (SISO) Feedback Figure
Control. CSC752: Autonomous Robotic Systems. Ubbo Visser. March 9, Department of Computer Science University of Miami
 Control CSC752: Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami March 9, 2017 Outline 1 Control system 2 Controller Images from http://en.wikipedia.org/wiki/feed-forward
Control CSC752: Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami March 9, 2017 Outline 1 Control system 2 Controller Images from http://en.wikipedia.org/wiki/feed-forward
A Holistic Approach to the Application of Model Predictive Control to Batch Reactors
 A Holistic Approach to the Application of Model Predictive Control to Batch Reactors A Singh*, P.G.R de Villiers**, P Rambalee***, G Gous J de Klerk, G Humphries * Lead Process Control Engineer, Anglo
A Holistic Approach to the Application of Model Predictive Control to Batch Reactors A Singh*, P.G.R de Villiers**, P Rambalee***, G Gous J de Klerk, G Humphries * Lead Process Control Engineer, Anglo
Chapter 4 Copolymerization
 Chapter 4 Copolymerization 4.1 Kinetics of Copolymerization 4.1.1 Involved Chemical Reactions Initiation I 2 + M 2R 1 r = 2 fk d I 2 R I Propagation Chain Transfer Termination m,n + k p m+1,n m,n + B k
Chapter 4 Copolymerization 4.1 Kinetics of Copolymerization 4.1.1 Involved Chemical Reactions Initiation I 2 + M 2R 1 r = 2 fk d I 2 R I Propagation Chain Transfer Termination m,n + k p m+1,n m,n + B k
SRI VENKATESWARA COLLEGE OF ENGINEERING
 COURSE DELIVERY PLAN - THEORY Page 1 of 7 Department of Chemical Engineering B.E/B.Tech/M.E/M.Tech : Chemical Engineering Regulation:2013 PG Specialisation : NA Sub. Code / Sub. Name : CH 6605 - Process
COURSE DELIVERY PLAN - THEORY Page 1 of 7 Department of Chemical Engineering B.E/B.Tech/M.E/M.Tech : Chemical Engineering Regulation:2013 PG Specialisation : NA Sub. Code / Sub. Name : CH 6605 - Process
MULTIVARIABLE ROBUST CONTROL OF AN INTEGRATED NUCLEAR POWER REACTOR
 Brazilian Journal of Chemical Engineering ISSN 0104-6632 Printed in Brazil Vol. 19, No. 04, pp. 441-447, October - December 2002 MULTIVARIABLE ROBUST CONTROL OF AN INTEGRATED NUCLEAR POWER REACTOR A.Etchepareborda
Brazilian Journal of Chemical Engineering ISSN 0104-6632 Printed in Brazil Vol. 19, No. 04, pp. 441-447, October - December 2002 MULTIVARIABLE ROBUST CONTROL OF AN INTEGRATED NUCLEAR POWER REACTOR A.Etchepareborda
B1-1. Closed-loop control. Chapter 1. Fundamentals of closed-loop control technology. Festo Didactic Process Control System
 B1-1 Chapter 1 Fundamentals of closed-loop control technology B1-2 This chapter outlines the differences between closed-loop and openloop control and gives an introduction to closed-loop control technology.
B1-1 Chapter 1 Fundamentals of closed-loop control technology B1-2 This chapter outlines the differences between closed-loop and openloop control and gives an introduction to closed-loop control technology.
Overview of Control System Design
 Overview of Control System Design Introduction Degrees of Freedom for Process Control Selection of Controlled, Manipulated, and Measured Variables Process Safety and Process Control 1 General Requirements
Overview of Control System Design Introduction Degrees of Freedom for Process Control Selection of Controlled, Manipulated, and Measured Variables Process Safety and Process Control 1 General Requirements
De-Coupler Design for an Interacting Tanks System
 IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE) e-issn: 2278-1676,p-ISSN: 2320-3331, Volume 7, Issue 3 (Sep. - Oct. 2013), PP 77-81 De-Coupler Design for an Interacting Tanks System
IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE) e-issn: 2278-1676,p-ISSN: 2320-3331, Volume 7, Issue 3 (Sep. - Oct. 2013), PP 77-81 De-Coupler Design for an Interacting Tanks System
Analysis and Design of Control Systems in the Time Domain
 Chapter 6 Analysis and Design of Control Systems in the Time Domain 6. Concepts of feedback control Given a system, we can classify it as an open loop or a closed loop depends on the usage of the feedback.
Chapter 6 Analysis and Design of Control Systems in the Time Domain 6. Concepts of feedback control Given a system, we can classify it as an open loop or a closed loop depends on the usage of the feedback.
Cascade Control of a Continuous Stirred Tank Reactor (CSTR)
") Journal of Applied and Industrial Sciences, 213, 1 (4): 16-23, ISSN: 2328-4595 (PRINT), ISSN: 2328-469 (ONLINE) Research Article Cascade Control of a Continuous Stirred Tank Reactor (CSTR) 16 A. O. Ahmed
Journal of Applied and Industrial Sciences, 213, 1 (4): 16-23, ISSN: 2328-4595 (PRINT), ISSN: 2328-469 (ONLINE) Research Article Cascade Control of a Continuous Stirred Tank Reactor (CSTR) 16 A. O. Ahmed
ABB PSPG-E7 SteamTMax Precise control of main and reheat ST. ABB Group May 8, 2014 Slide 1 ABB
 ABB PSPG-E7 SteamTMax Precise control of main and reheat ST May 8, 2014 Slide 1 Challenge m S m att T in T out Live steam and reheated steam temperatures are controlled process variables critical in steam
ABB PSPG-E7 SteamTMax Precise control of main and reheat ST May 8, 2014 Slide 1 Challenge m S m att T in T out Live steam and reheated steam temperatures are controlled process variables critical in steam
Process Dynamics, Operations, and Control Lecture Notes 2
 Chapter. Dynamic system.45 Process Dynamics, Operations, and Control. Context In this chapter, we define the term 'system' and how it relates to 'process' and 'control'. We will also show how a simple
Chapter. Dynamic system.45 Process Dynamics, Operations, and Control. Context In this chapter, we define the term 'system' and how it relates to 'process' and 'control'. We will also show how a simple
Getting started with BatchReactor Example : Simulation of the Chlorotoluene chlorination
 Getting started with BatchReactor Example : Simulation of the Chlorotoluene chlorination 2011 ProSim S.A. All rights reserved. Introduction This document presents the different steps to follow in order
Getting started with BatchReactor Example : Simulation of the Chlorotoluene chlorination 2011 ProSim S.A. All rights reserved. Introduction This document presents the different steps to follow in order
NonlinearControlofpHSystemforChangeOverTitrationCurve
 D. SWATI et al., Nonlinear Control of ph System for Change Over Titration Curve, Chem. Biochem. Eng. Q. 19 (4) 341 349 (2005) 341 NonlinearControlofpHSystemforChangeOverTitrationCurve D. Swati, V. S. R.
D. SWATI et al., Nonlinear Control of ph System for Change Over Titration Curve, Chem. Biochem. Eng. Q. 19 (4) 341 349 (2005) 341 NonlinearControlofpHSystemforChangeOverTitrationCurve D. Swati, V. S. R.
CHBE320 LECTURE XI CONTROLLER DESIGN AND PID CONTOLLER TUNING. Professor Dae Ryook Yang
 CHBE320 LECTURE XI CONTROLLER DESIGN AND PID CONTOLLER TUNING Professor Dae Ryook Yang Spring 2018 Dept. of Chemical and Biological Engineering 11-1 Road Map of the Lecture XI Controller Design and PID
CHBE320 LECTURE XI CONTROLLER DESIGN AND PID CONTOLLER TUNING Professor Dae Ryook Yang Spring 2018 Dept. of Chemical and Biological Engineering 11-1 Road Map of the Lecture XI Controller Design and PID
DESIGN OF AN ON-LINE TITRATOR FOR NONLINEAR ph CONTROL
 DESIGN OF AN ON-LINE TITRATOR FOR NONLINEAR CONTROL Alex D. Kalafatis Liuping Wang William R. Cluett AspenTech, Toronto, Canada School of Electrical & Computer Engineering, RMIT University, Melbourne,
DESIGN OF AN ON-LINE TITRATOR FOR NONLINEAR CONTROL Alex D. Kalafatis Liuping Wang William R. Cluett AspenTech, Toronto, Canada School of Electrical & Computer Engineering, RMIT University, Melbourne,
Chapter 2 Linear Feedback Control
 Chapter 2 Linear Feedback Control The by far most used control method in industry is the proportional-integralderivative or PID controller. It is currently claimed that 90 to 95% of industrial problems
Chapter 2 Linear Feedback Control The by far most used control method in industry is the proportional-integralderivative or PID controller. It is currently claimed that 90 to 95% of industrial problems
Control of Neutralization Process in Continuous Stirred Tank Reactor (CSTR)
") Control of Neutralization Process in Continuous Stirred Tank Reactor (CSTR) Dr. Magan P. Ghatule Department of Computer Science, Sinhgad College of Science, Ambegaon (Bk), Pune-41. gmagan@rediffmail.com
Control of Neutralization Process in Continuous Stirred Tank Reactor (CSTR) Dr. Magan P. Ghatule Department of Computer Science, Sinhgad College of Science, Ambegaon (Bk), Pune-41. gmagan@rediffmail.com
Competences. The smart choice of Fluid Control Systems
 Competences The smart choice of Fluid Control Systems Contents 1. Open-loop and closed-loop control Page 4 1.1. Function and sequence of an open-loop control system Page 4 1.2. Function and sequence of
Competences The smart choice of Fluid Control Systems Contents 1. Open-loop and closed-loop control Page 4 1.1. Function and sequence of an open-loop control system Page 4 1.2. Function and sequence of
Index Accumulation, 53 Accuracy: numerical integration, sensor, 383, Adaptive tuning: expert system, 528 gain scheduling, 518, 529, 709,
 Accumulation, 53 Accuracy: numerical integration, 83-84 sensor, 383, 772-773 Adaptive tuning: expert system, 528 gain scheduling, 518, 529, 709, 715 input conversion, 519 reasons for, 512-517 relay auto-tuning,
Accumulation, 53 Accuracy: numerical integration, 83-84 sensor, 383, 772-773 Adaptive tuning: expert system, 528 gain scheduling, 518, 529, 709, 715 input conversion, 519 reasons for, 512-517 relay auto-tuning,
Theoretical Models of Chemical Processes
 Theoretical Models of Chemical Processes Dr. M. A. A. Shoukat Choudhury 1 Rationale for Dynamic Models 1. Improve understanding of the process 2. Train Plant operating personnel 3. Develop control strategy
Theoretical Models of Chemical Processes Dr. M. A. A. Shoukat Choudhury 1 Rationale for Dynamic Models 1. Improve understanding of the process 2. Train Plant operating personnel 3. Develop control strategy
Control Loop Investigations
 Control Loop Investigations Peter Thomas Control Specialists Ltd ExperTune User Conference Austin Texas April 2007 www.controlspecialists.co.uk Control Loop Investigations Bridging the gap between Industrial
Control Loop Investigations Peter Thomas Control Specialists Ltd ExperTune User Conference Austin Texas April 2007 www.controlspecialists.co.uk Control Loop Investigations Bridging the gap between Industrial
Chapter 10. Closed-Loop Control Systems
 hapter 0 loed-loop ontrol Sytem ontrol Diagram of a Typical ontrol Loop Actuator Sytem F F 2 T T 2 ontroller T Senor Sytem T TT omponent and Signal of a Typical ontrol Loop F F 2 T Air 3-5 pig 4-20 ma
hapter 0 loed-loop ontrol Sytem ontrol Diagram of a Typical ontrol Loop Actuator Sytem F F 2 T T 2 ontroller T Senor Sytem T TT omponent and Signal of a Typical ontrol Loop F F 2 T Air 3-5 pig 4-20 ma
= A x (t) + B utt), by d{ _-=-=-
 + B utt), by d{ _-=-=-") M.Tech. [ 24 103 ] Degree Examination ndustrial Process nstrumentation First Semester COMPUTER CONTROL OF PROCESSES (Effective from the Admitted Batch of2003-2004) Time: 3 Hours Maximum marks: 100 Answer
M.Tech. [ 24 103 ] Degree Examination ndustrial Process nstrumentation First Semester COMPUTER CONTROL OF PROCESSES (Effective from the Admitted Batch of2003-2004) Time: 3 Hours Maximum marks: 100 Answer
INTRODUCTION TO THE SIMULATION OF ENERGY AND STORAGE SYSTEMS
 INTRODUCTION TO THE SIMULATION OF ENERGY AND STORAGE SYSTEMS 20.4.2018 FUSES+ in Stralsund Merja Mäkelä merja.makela@xamk.fi South-Eastern Finland University of Applied Sciences Intended learning outcomes
INTRODUCTION TO THE SIMULATION OF ENERGY AND STORAGE SYSTEMS 20.4.2018 FUSES+ in Stralsund Merja Mäkelä merja.makela@xamk.fi South-Eastern Finland University of Applied Sciences Intended learning outcomes
Process Control, 3P4 Assignment 5
 Process Control, 3P4 Assignment 5 Kevin Dunn, kevin.dunn@mcmaster.ca Due date: 12 March 2014 This assignment is due on Wednesday, 12 March 2014. Late hand-ins are not allowed. Since it is posted mainly
Process Control, 3P4 Assignment 5 Kevin Dunn, kevin.dunn@mcmaster.ca Due date: 12 March 2014 This assignment is due on Wednesday, 12 March 2014. Late hand-ins are not allowed. Since it is posted mainly
Improved Identification and Control of 2-by-2 MIMO System using Relay Feedback
 CEAI, Vol.17, No.4 pp. 23-32, 2015 Printed in Romania Improved Identification and Control of 2-by-2 MIMO System using Relay Feedback D.Kalpana, T.Thyagarajan, R.Thenral Department of Instrumentation Engineering,
CEAI, Vol.17, No.4 pp. 23-32, 2015 Printed in Romania Improved Identification and Control of 2-by-2 MIMO System using Relay Feedback D.Kalpana, T.Thyagarajan, R.Thenral Department of Instrumentation Engineering,
Feedforward Control Feedforward Compensation
 Feedforward Control Feedforward Compensation Compensation Feedforward Control Feedforward Control of a Heat Exchanger Implementation Issues Comments Nomenclature The inherent limitation of feedback control
Feedforward Control Feedforward Compensation Compensation Feedforward Control Feedforward Control of a Heat Exchanger Implementation Issues Comments Nomenclature The inherent limitation of feedback control
Index. INDEX_p /15/02 3:08 PM Page 765
 INDEX_p.765-770 11/15/02 3:08 PM Page 765 Index N A Adaptive control, 144 Adiabatic reactors, 465 Algorithm, control, 5 All-pass factorization, 257 All-pass, frequency response, 225 Amplitude, 216 Amplitude
INDEX_p.765-770 11/15/02 3:08 PM Page 765 Index N A Adaptive control, 144 Adiabatic reactors, 465 Algorithm, control, 5 All-pass factorization, 257 All-pass, frequency response, 225 Amplitude, 216 Amplitude
Dynamic simulation of DH house stations
 Article Dynamic simulation of DH house stations Jan Eric Thorsen, Director, DHS Application Centre, Danfoss A/S www.danfoss.com Jan Eric Thorsen, Director, DHS Application Centre, Danfoss A/S Presented
Article Dynamic simulation of DH house stations Jan Eric Thorsen, Director, DHS Application Centre, Danfoss A/S www.danfoss.com Jan Eric Thorsen, Director, DHS Application Centre, Danfoss A/S Presented
Multiple Model Based Adaptive Control for Shell and Tube Heat Exchanger Process
 Multiple Model Based Adaptive Control for Shell and Tube Heat Exchanger Process R. Manikandan Assistant Professor, Department of Electronics and Instrumentation Engineering, Annamalai University, Annamalai
Multiple Model Based Adaptive Control for Shell and Tube Heat Exchanger Process R. Manikandan Assistant Professor, Department of Electronics and Instrumentation Engineering, Annamalai University, Annamalai
Overview of Control System Design
 Overview of Control System Design Chapter 10 General Requirements 1. Safety. It is imperative that industrial plants operate safely so as to promote the well-being of people and equipment within the plant
Overview of Control System Design Chapter 10 General Requirements 1. Safety. It is imperative that industrial plants operate safely so as to promote the well-being of people and equipment within the plant
CONTROL OF MULTIVARIABLE PROCESSES
 Process plants ( or complex experiments) have many variables that must be controlled. The engineer must. Provide the needed sensors 2. Provide adequate manipulated variables 3. Decide how the CVs and MVs
Process plants ( or complex experiments) have many variables that must be controlled. The engineer must. Provide the needed sensors 2. Provide adequate manipulated variables 3. Decide how the CVs and MVs
Control Lab. Thermal Plant. Chriss Grimholt
 Control Lab Thermal Plant Chriss Grimholt Process System Engineering Department of Chemical Engineering Norwegian University of Science and Technology October 3, 23 C. Grimholt (NTNU) Thermal Plant October
Control Lab Thermal Plant Chriss Grimholt Process System Engineering Department of Chemical Engineering Norwegian University of Science and Technology October 3, 23 C. Grimholt (NTNU) Thermal Plant October
Appendix A: Exercise Problems on Classical Feedback Control Theory (Chaps. 1 and 2)
") Appendix A: Exercise Problems on Classical Feedback Control Theory (Chaps. 1 and 2) For all calculations in this book, you can use the MathCad software or any other mathematical software that you are familiar
Appendix A: Exercise Problems on Classical Feedback Control Theory (Chaps. 1 and 2) For all calculations in this book, you can use the MathCad software or any other mathematical software that you are familiar
Investigation of adiabatic batch reactor
 Investigation of adiabatic batch reactor Introduction The theory of chemical reactors is summarized in instructions to Investigation of chemical reactors. If a reactor operates adiabatically then no heat
Investigation of adiabatic batch reactor Introduction The theory of chemical reactors is summarized in instructions to Investigation of chemical reactors. If a reactor operates adiabatically then no heat
Design of Decentralised PI Controller using Model Reference Adaptive Control for Quadruple Tank Process
 Design of Decentralised PI Controller using Model Reference Adaptive Control for Quadruple Tank Process D.Angeline Vijula #, Dr.N.Devarajan * # Electronics and Instrumentation Engineering Sri Ramakrishna
Design of Decentralised PI Controller using Model Reference Adaptive Control for Quadruple Tank Process D.Angeline Vijula #, Dr.N.Devarajan * # Electronics and Instrumentation Engineering Sri Ramakrishna
1. Mark the correct statement(s)
") 1. Mark the correct statement(s) Figure to the right shows a mass measurement scale using a spring. 1.1 The span of the scale is a) 16 kg b) 21 kg c) 11 kg d) 5-16 kg 1.2 The range of the scale is a) 16
1. Mark the correct statement(s) Figure to the right shows a mass measurement scale using a spring. 1.1 The span of the scale is a) 16 kg b) 21 kg c) 11 kg d) 5-16 kg 1.2 The range of the scale is a) 16
Performance Characteristics of Deterministic Leak Detection Systems
 Performance Characteristics of Deterministic Leak Detection Systems Michael Kasch 3S Consult München GmbH Germany Abstract The aim of leak detection and leak location is the limitation of losses and possible
Performance Characteristics of Deterministic Leak Detection Systems Michael Kasch 3S Consult München GmbH Germany Abstract The aim of leak detection and leak location is the limitation of losses and possible
Solutions for Tutorial 3 Modelling of Dynamic Systems
 Solutions for Tutorial 3 Modelling of Dynamic Systems 3.1 Mixer: Dynamic model of a CSTR is derived in textbook Example 3.1. From the model, we know that the outlet concentration of, C, can be affected
Solutions for Tutorial 3 Modelling of Dynamic Systems 3.1 Mixer: Dynamic model of a CSTR is derived in textbook Example 3.1. From the model, we know that the outlet concentration of, C, can be affected
Pre GATE Pre-GATE 2018
 Pre GATE-018 Chemical Engineering CH 1 Pre-GATE 018 Duration : 180 minutes Total Marks : 100 CODE: GATE18-1B Classroom Postal Course Test Series (Add : 61C, Kalusarai Near HauzKhas Metro, Delhi 9990657855)
Pre GATE-018 Chemical Engineering CH 1 Pre-GATE 018 Duration : 180 minutes Total Marks : 100 CODE: GATE18-1B Classroom Postal Course Test Series (Add : 61C, Kalusarai Near HauzKhas Metro, Delhi 9990657855)
PID controllers, part I
 Faculty of Mechanical and Power Engineering Dr inŝ. JANUSZ LICHOTA CONTROL SYSTEMS PID controllers, part I Wrocław 2007 CONTENTS Controller s classification PID controller what is it? Typical controller
Faculty of Mechanical and Power Engineering Dr inŝ. JANUSZ LICHOTA CONTROL SYSTEMS PID controllers, part I Wrocław 2007 CONTENTS Controller s classification PID controller what is it? Typical controller
Process Control and Instrumentation Prof. A. K. Jana Department of Chemical Engineering Indian Institute of Technology, Kharagpur
 Process Control and Instrumentation Prof. A. K. Jana Department of Chemical Engineering Indian Institute of Technology, Kharagpur Lecture - 17 Feedback Control Schemes (Contd.) In the last class we discussed
Process Control and Instrumentation Prof. A. K. Jana Department of Chemical Engineering Indian Institute of Technology, Kharagpur Lecture - 17 Feedback Control Schemes (Contd.) In the last class we discussed
24 volts (0.25 amps current-limited)
") Question 1 Questions Suppose the lamp refuses to light up. A voltmeter registers 24 volts between test points C and D: A C E + 24 volts (0.25 amps current-limited) B D F First, list all the possible (single)
Question 1 Questions Suppose the lamp refuses to light up. A voltmeter registers 24 volts between test points C and D: A C E + 24 volts (0.25 amps current-limited) B D F First, list all the possible (single)
DUBLIN INSTITUTE OF TECHNOLOGY Kevin Street, Dublin 8.
 Question Sheet Page 1 of 5 Instructions for the student: Question 1 is compulsory [40 marks] Attempt any two other questions [30 marks per question] The following must be made available during the examination:
Question Sheet Page 1 of 5 Instructions for the student: Question 1 is compulsory [40 marks] Attempt any two other questions [30 marks per question] The following must be made available during the examination:
2. Describe the second law in terms of adiabatic and reversible processes.
 Lecture #3 1 Lecture 3 Objectives: Students will be able to: 1. Describe the first law in terms of heat and work interactions.. Describe the second law in terms of adiabatic and reversible processes. 3.
Lecture #3 1 Lecture 3 Objectives: Students will be able to: 1. Describe the first law in terms of heat and work interactions.. Describe the second law in terms of adiabatic and reversible processes. 3.
BITS-Pilani Dubai, International Academic City, Dubai Second Semester. Academic Year
 BITS-Pilani Dubai, International Academic City, Dubai Second Semester. Academic Year 2007-2008 Evaluation Com anent: Com rehensive Examination Closed Book CHE UC441/11NSTR UC 45'1 PROCESS CONTROL Date:
BITS-Pilani Dubai, International Academic City, Dubai Second Semester. Academic Year 2007-2008 Evaluation Com anent: Com rehensive Examination Closed Book CHE UC441/11NSTR UC 45'1 PROCESS CONTROL Date:
Understand How Valves & Fittings Affect Head Loss
 Understand How Valves & Fittings Affect Head Loss by Ray Hardee (Engineered Software, Inc.) This column discusses valves and fittings and evaluates how these devices affect the operation of piping systems.
Understand How Valves & Fittings Affect Head Loss by Ray Hardee (Engineered Software, Inc.) This column discusses valves and fittings and evaluates how these devices affect the operation of piping systems.
Systems Design Engineer, The Foxboro Company
 Application F. G. SHINSKEY Systems Design Engineer, The Foxboro Company M C G R A W - H I L L B O O K C O M P A N Y New York San Francisco Toronto London Sydney ... viii I Preface are not communicated
Application F. G. SHINSKEY Systems Design Engineer, The Foxboro Company M C G R A W - H I L L B O O K C O M P A N Y New York San Francisco Toronto London Sydney ... viii I Preface are not communicated
Temperature Control of CSTR Using Fuzzy Logic Control and IMC Control
 Vo1ume 1, No. 04, December 2014 936 Temperature Control of CSTR Using Fuzzy Logic Control and Control Aravind R Varma and Dr.V.O. Rejini Abstract--- Fuzzy logic controllers are useful in chemical processes
Vo1ume 1, No. 04, December 2014 936 Temperature Control of CSTR Using Fuzzy Logic Control and Control Aravind R Varma and Dr.V.O. Rejini Abstract--- Fuzzy logic controllers are useful in chemical processes
Process Unit Control System Design
 Process Unit Control System Design 1. Introduction 2. Influence of process design 3. Control degrees of freedom 4. Selection of control system variables 5. Process safety Introduction Control system requirements»
Process Unit Control System Design 1. Introduction 2. Influence of process design 3. Control degrees of freedom 4. Selection of control system variables 5. Process safety Introduction Control system requirements»
CHAPTER 1 Basic Concepts of Control System. CHAPTER 6 Hydraulic Control System
 CHAPTER 1 Basic Concepts of Control System 1. What is open loop control systems and closed loop control systems? Compare open loop control system with closed loop control system. Write down major advantages
CHAPTER 1 Basic Concepts of Control System 1. What is open loop control systems and closed loop control systems? Compare open loop control system with closed loop control system. Write down major advantages
REDUCING PROCESS VARIABLITY BY USING FASTER RESPONDING FLOWMETERS IN FLOW CONTROL
 REDUCING PROCESS VARIABLITY BY USING FASTER RESPONDING FLOWMETERS IN FLOW CONTROL David Wiklund Marcos Peluso Sr. Principal Engineer Director of Temperature and Plantweb Development Rosemount, Inc. Rosemount,
REDUCING PROCESS VARIABLITY BY USING FASTER RESPONDING FLOWMETERS IN FLOW CONTROL David Wiklund Marcos Peluso Sr. Principal Engineer Director of Temperature and Plantweb Development Rosemount, Inc. Rosemount,
D O T 1 ; O T 2 ; O T 3 ; O T i
 156 6 Fault diagnosis of pumps The model parameters O T h D O T 1 ; O T 2 ; O T 3 ; O T i 4 (6.1.38) were estimated by the leastsquares method in the form of discrete squareroot filtering (DSFI). Based
156 6 Fault diagnosis of pumps The model parameters O T h D O T 1 ; O T 2 ; O T 3 ; O T i 4 (6.1.38) were estimated by the leastsquares method in the form of discrete squareroot filtering (DSFI). Based
Open Loop Tuning Rules
 Open Loop Tuning Rules Based on approximate process models Process Reaction Curve: The process reaction curve is an approximate model of the process, assuming the process behaves as a first order plus
Open Loop Tuning Rules Based on approximate process models Process Reaction Curve: The process reaction curve is an approximate model of the process, assuming the process behaves as a first order plus
Solutions for Tutorial 5 Dynamic Behavior of Typical Dynamic Systems
 olutions for Tutorial 5 Dynamic Behavior of Typical Dynamic ystems 5.1 First order ystem: A model for a first order system is given in the following equation. dy dt X in X out (5.1.1) What conditions have
olutions for Tutorial 5 Dynamic Behavior of Typical Dynamic ystems 5.1 First order ystem: A model for a first order system is given in the following equation. dy dt X in X out (5.1.1) What conditions have
ME332 FLUID MECHANICS LABORATORY (PART II)
") ME332 FLUID MECHANICS LABORATORY (PART II) Mihir Sen Department of Aerospace and Mechanical Engineering University of Notre Dame Notre Dame, IN 46556 Version: April 2, 2002 Contents Unit 5: Momentum transfer
ME332 FLUID MECHANICS LABORATORY (PART II) Mihir Sen Department of Aerospace and Mechanical Engineering University of Notre Dame Notre Dame, IN 46556 Version: April 2, 2002 Contents Unit 5: Momentum transfer
R a) Compare open loop and closed loop control systems. b) Clearly bring out, from basics, Force-current and Force-Voltage analogies.
 Compare open loop and closed loop control systems. b) Clearly bring out, from basics, Force-current and Force-Voltage analogies.") SET - 1 II B. Tech II Semester Supplementary Examinations Dec 01 1. a) Compare open loop and closed loop control systems. b) Clearly bring out, from basics, Force-current and Force-Voltage analogies..
SET - 1 II B. Tech II Semester Supplementary Examinations Dec 01 1. a) Compare open loop and closed loop control systems. b) Clearly bring out, from basics, Force-current and Force-Voltage analogies..
Ali Karimpour Associate Professor Ferdowsi University of Mashhad
 CONTROL IN INSTRUMENTATION Ali Karimpour Associate Professor Ferdowsi University of Mashhad Reference: - Advanced PID Control by Karl j. Astrom and Tore Hagglund, ISA, 2006 مدلسازی و کنترل صنعتی تالیف
CONTROL IN INSTRUMENTATION Ali Karimpour Associate Professor Ferdowsi University of Mashhad Reference: - Advanced PID Control by Karl j. Astrom and Tore Hagglund, ISA, 2006 مدلسازی و کنترل صنعتی تالیف
Vaporization Heat of Liquid N 2
 Physics Department Thermodynamic Laboratory Vaporization Heat of Liquid N 2 1. Goal Determination of the latent heat of vaporization of liquid Nitrogen. 2. Foundations Warning: Liquid nitrogen can cause
Physics Department Thermodynamic Laboratory Vaporization Heat of Liquid N 2 1. Goal Determination of the latent heat of vaporization of liquid Nitrogen. 2. Foundations Warning: Liquid nitrogen can cause
Practical Considerations and Solutions for Temperature-Dependent S-Parameter Measurement for Accurate Parameter Extraction of
 Practical Considerations and Solutions for Temperature-Dependent S-Parameter Measurement for Accurate Parameter Extraction of Advanced RF Devices Gavin Fisher, Application Engineer Andrej Rumiantsev, Product
Practical Considerations and Solutions for Temperature-Dependent S-Parameter Measurement for Accurate Parameter Extraction of Advanced RF Devices Gavin Fisher, Application Engineer Andrej Rumiantsev, Product
Guide to Selected Process Examples :ili3g eil;]iil
![Guide to Selected Process Examples :ili3g eil;]iil](/thumbs/85/91730677.jpg "Guide to Selected Process Examples :ili3g eil;]iil") Guide to Selected Process Examples :ili3g eil;]iil Because of the strong interplay between process dynamics and control perfor mance, examples should begin with process equipment and operating conditions.
Guide to Selected Process Examples :ili3g eil;]iil Because of the strong interplay between process dynamics and control perfor mance, examples should begin with process equipment and operating conditions.
SOLUTION MANUAL ENGLISH UNIT PROBLEMS CHAPTER 4 SONNTAG BORGNAKKE VAN WYLEN. FUNDAMENTALS of. Thermodynamics. Sixth Edition
 SOLUTION MANUAL ENGLISH UNIT PROBLEMS CHAPTER 4 SONNTAG BORGNAKKE VAN WYLEN FUNDAMENTALS of Thermodynamics Sixth Edition CHAPTER 4 SUBSECTION PROB NO. Concept-Study Guide Problems 7- Simple processes 3-8
SOLUTION MANUAL ENGLISH UNIT PROBLEMS CHAPTER 4 SONNTAG BORGNAKKE VAN WYLEN FUNDAMENTALS of Thermodynamics Sixth Edition CHAPTER 4 SUBSECTION PROB NO. Concept-Study Guide Problems 7- Simple processes 3-8
Iterative Controller Tuning Using Bode s Integrals
 Iterative Controller Tuning Using Bode s Integrals A. Karimi, D. Garcia and R. Longchamp Laboratoire d automatique, École Polytechnique Fédérale de Lausanne (EPFL), 05 Lausanne, Switzerland. email: alireza.karimi@epfl.ch
Iterative Controller Tuning Using Bode s Integrals A. Karimi, D. Garcia and R. Longchamp Laboratoire d automatique, École Polytechnique Fédérale de Lausanne (EPFL), 05 Lausanne, Switzerland. email: alireza.karimi@epfl.ch