Control. CSC752: Autonomous Robotic Systems. Ubbo Visser. March 9, Department of Computer Science University of Miami
|
|
|
- Aileen Malone
- 5 years ago
- Views:
Transcription
1 Control CSC752: Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami March 9, 2017
2 Outline 1 Control system 2

3 Controller Images from
4 Controller Open loop: Images from
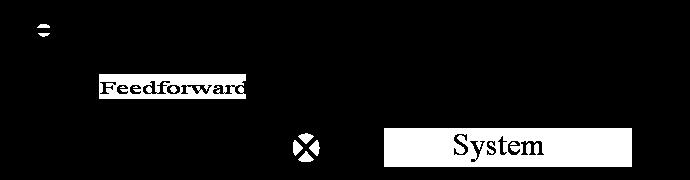
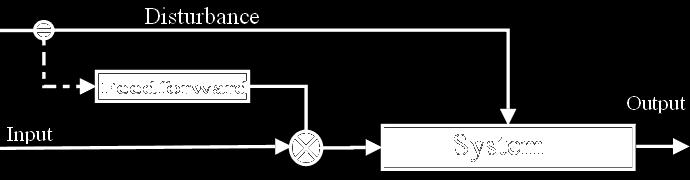
5 Controller Open loop: Feed-forward: Images from
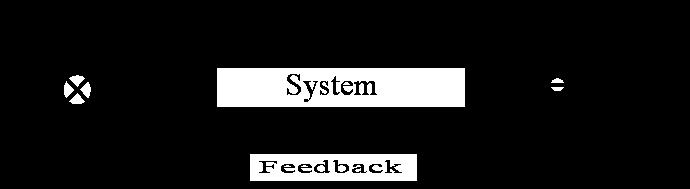
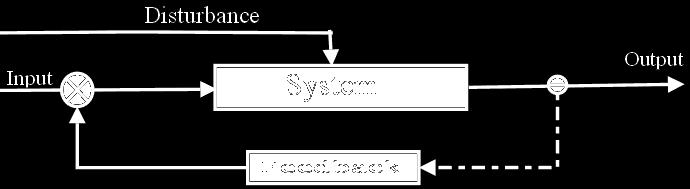
6 Controller Open loop: Feed-forward: Closed loop / feedback: Images from
7 Controller Controller Actuator Effect Feedback
8 Controller Controller Actuator Effect Feedback Measureable output: process variable (PV) Reference: setpoint (SP) System input: manipulated variable (MV) Error e = SP-PV
9 Examples for feedback control Feedback controller can be used to regulate e.g. temperature, pressure, flow rate, speed... Refridgerator Oven temperature Car velocity...
10 Example: Car velocity control Controller for the speed of a car.
11 Example: Car velocity control Controller for the speed of a car. Simple on-off design: Velocity Controller Output Desired Speed Hysteresis to avoid unbounded oscillations. Following slides based on material from jacky/teaching/courses/
12 Example: Car velocity control - Proportional control Controller sets throttle proportional to the output.
13 Example: Car velocity control - Proportional control Controller sets throttle proportional to the output. u(t) = MV (t) = K P e(t), where K P is the controller gain.
14 Example: Car velocity control - Proportional control Controller sets throttle proportional to the output. u(t) = MV (t) = K P e(t), where K P is the controller gain. In the end PV SP, since MV is 0 is for the error 0.
15 Example: Car velocity control - Derivative control Derivative term avoids oscillations of high gains. u(t) = K P e(t) + K D d e(t) dt
16 Example: Car velocity control - Derivative control Derivative term avoids oscillations of high gains. u(t) = K P e(t) + K D d e(t) dt
17 Example: Car velocity control - Integral control Integral term avoids the steady state error. t d e(t) u(t) = K P e(t) + K I e(t)dt + K D dt 0
18 Example: Car velocity control - Integral control Integral term avoids the steady state error. t d e(t) u(t) = K P e(t) + K I e(t)dt + K D dt 0
19 / three term controller t d e(t) u(t) = K P e(t) + K I e(t)dt + K D dt 0 Effects of increasing the gains K P, K I and K D Parameter Rise time Overshoot Settling time Steady state error K P Decrease Increase Small change Decrease K I Decrease Increase Increase Eliminate K D Small change Decrease Decrease Small change Trade off between response time and stability.
20 Problem with s Integral wind-up Physical limits of the actuator let the integral term accumulate a high error.
21 Problem with s Integral wind-up Physical limits of the actuator let the integral term accumulate a high error. What if the controller tries to drive faster than the maximum velocity of the car?
22 Problem with s Integral wind-up Physical limits of the actuator let the integral term accumulate a high error. What if the controller tries to drive faster than the maximum velocity of the car? The error never reaches 0 and the integral term continues to increase. Once the speed is reduced, the integral term will still increase the speed.
23 Example: Car velocity control - Integral wind-up Solution: Max/min values for the integral. Stop summation on saturation.
24 RoboCup examples A humanoid robot can use controllers for several tasks:
25 RoboCup examples A humanoid robot can use controllers for several tasks: Move joint to a given angle.
26 RoboCup examples A humanoid robot can use controllers for several tasks: Move joint to a given angle. Desired joint angle, controller sets voltage, motor moves joint, current joint angle is measured.
27 RoboCup examples A humanoid robot can use controllers for several tasks: Move joint to a given angle. Desired joint angle, controller sets voltage, motor moves joint, current joint angle is measured. Balancing (inverted pendulum).
28 RoboCup examples A humanoid robot can use controllers for several tasks: Move joint to a given angle. Desired joint angle, controller sets voltage, motor moves joint, current joint angle is measured. Balancing (inverted pendulum). Desired torso angle, controller sets walk command, walk motion moves robot, torso angle is measured.
29 RoboCup examples A humanoid robot can use controllers for several tasks: Move joint to a given angle. Desired joint angle, controller sets voltage, motor moves joint, current joint angle is measured. Balancing (inverted pendulum). Desired torso angle, controller sets walk command, walk motion moves robot, torso angle is measured. Walk to position.
30 RoboCup examples A humanoid robot can use controllers for several tasks: Move joint to a given angle. Desired joint angle, controller sets voltage, motor moves joint, current joint angle is measured. Balancing (inverted pendulum). Desired torso angle, controller sets walk command, walk motion moves robot, torso angle is measured. Walk to position. Desired position, controller sets walk command, walk motion moves robot, robot position is measured....
31 Acknowledgement Acknowledgement The slides for this lecture have been prepared by Andreas Seekircher.
Lecture 6: Control Problems and Solutions. CS 344R: Robotics Benjamin Kuipers
 Lecture 6: Control Problems and Solutions CS 344R: Robotics Benjamin Kuipers But First, Assignment 1: Followers A follower is a control law where the robot moves forward while keeping some error term small.
Lecture 6: Control Problems and Solutions CS 344R: Robotics Benjamin Kuipers But First, Assignment 1: Followers A follower is a control law where the robot moves forward while keeping some error term small.
Chapter 7 Control. Part Classical Control. Mobile Robotics - Prof Alonzo Kelly, CMU RI
 Chapter 7 Control 7.1 Classical Control Part 1 1 7.1 Classical Control Outline 7.1.1 Introduction 7.1.2 Virtual Spring Damper 7.1.3 Feedback Control 7.1.4 Model Referenced and Feedforward Control Summary
Chapter 7 Control 7.1 Classical Control Part 1 1 7.1 Classical Control Outline 7.1.1 Introduction 7.1.2 Virtual Spring Damper 7.1.3 Feedback Control 7.1.4 Model Referenced and Feedforward Control Summary
Reglerteknik, TNG028. Lecture 1. Anna Lombardi
 Reglerteknik, TNG028 Lecture 1 Anna Lombardi Today lecture We will try to answer the following questions: What is automatic control? Where can we nd automatic control? Why do we need automatic control?
Reglerteknik, TNG028 Lecture 1 Anna Lombardi Today lecture We will try to answer the following questions: What is automatic control? Where can we nd automatic control? Why do we need automatic control?
ELEC4631 s Lecture 2: Dynamic Control Systems 7 March Overview of dynamic control systems
 ELEC4631 s Lecture 2: Dynamic Control Systems 7 March 2011 Overview of dynamic control systems Goals of Controller design Autonomous dynamic systems Linear Multi-input multi-output (MIMO) systems Bat flight
ELEC4631 s Lecture 2: Dynamic Control Systems 7 March 2011 Overview of dynamic control systems Goals of Controller design Autonomous dynamic systems Linear Multi-input multi-output (MIMO) systems Bat flight
Modeling and state estimation Examples State estimation Probabilities Bayes filter Particle filter. Modeling. CSC752 Autonomous Robotic Systems
 Modeling CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami February 21, 2017 Outline 1 Modeling and state estimation 2 Examples 3 State estimation 4 Probabilities
Modeling CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami February 21, 2017 Outline 1 Modeling and state estimation 2 Examples 3 State estimation 4 Probabilities
Application Note #3413
 Application Note #3413 Manual Tuning Methods Tuning the controller seems to be a difficult task to some users; however, after getting familiar with the theories and tricks behind it, one might find the
Application Note #3413 Manual Tuning Methods Tuning the controller seems to be a difficult task to some users; however, after getting familiar with the theories and tricks behind it, one might find the
Laboratory Exercise 1 DC servo
 Laboratory Exercise DC servo Per-Olof Källén ø 0,8 POWER SAT. OVL.RESET POS.RESET Moment Reference ø 0,5 ø 0,5 ø 0,5 ø 0,65 ø 0,65 Int ø 0,8 ø 0,8 Σ k Js + d ø 0,8 s ø 0 8 Off Off ø 0,8 Ext. Int. + x0,
Laboratory Exercise DC servo Per-Olof Källén ø 0,8 POWER SAT. OVL.RESET POS.RESET Moment Reference ø 0,5 ø 0,5 ø 0,5 ø 0,65 ø 0,65 Int ø 0,8 ø 0,8 Σ k Js + d ø 0,8 s ø 0 8 Off Off ø 0,8 Ext. Int. + x0,
Single-Input-Single-Output Systems
 TF 502 Single-Input-Single-Output Systems SIST, ShanghaiTech Introduction Open-Loop Control-Response Proportional Control General PID Control Boris Houska 1-1 Contents Introduction Open-Loop Control-Response
TF 502 Single-Input-Single-Output Systems SIST, ShanghaiTech Introduction Open-Loop Control-Response Proportional Control General PID Control Boris Houska 1-1 Contents Introduction Open-Loop Control-Response
INC 693, 481 Dynamics System and Modelling: Introduction to Modelling Dr.-Ing. Sudchai Boonto Assistant Professor
 INC 693, 481 Dynamics System and Modelling: Introduction to Modelling Dr.-Ing. Sudchai Boonto Assistant Professor Department of Control System and Instrumentation Engineering King Mongkut s Unniversity
INC 693, 481 Dynamics System and Modelling: Introduction to Modelling Dr.-Ing. Sudchai Boonto Assistant Professor Department of Control System and Instrumentation Engineering King Mongkut s Unniversity
Acknowledgements. Control System. Tracking. CS122A: Embedded System Design 4/24/2007. A Simple Introduction to Embedded Control Systems (PID Control)
") Acknowledgements A Simple Introduction to Embedded Control Systems (PID Control) The material in this lecture is adapted from: F. Vahid and T. Givargis, Embedded System Design A Unified Hardware/Software
Acknowledgements A Simple Introduction to Embedded Control Systems (PID Control) The material in this lecture is adapted from: F. Vahid and T. Givargis, Embedded System Design A Unified Hardware/Software
Introduction to Feedback Control
 Introduction to Feedback Control Control System Design Why Control? Open-Loop vs Closed-Loop (Feedback) Why Use Feedback Control? Closed-Loop Control System Structure Elements of a Feedback Control System
Introduction to Feedback Control Control System Design Why Control? Open-Loop vs Closed-Loop (Feedback) Why Use Feedback Control? Closed-Loop Control System Structure Elements of a Feedback Control System
Integrator Windup
 3.5.2. Integrator Windup 3.5.2.1. Definition So far we have mainly been concerned with linear behaviour, as is often the case with analysis and design of control systems. There is, however, one nonlinear
3.5.2. Integrator Windup 3.5.2.1. Definition So far we have mainly been concerned with linear behaviour, as is often the case with analysis and design of control systems. There is, however, one nonlinear
Control 2. Proportional and Integral control
 Control 2 Proportional and Integral control 1 Disturbance rejection in Proportional Control Θ i =5 + _ Controller K P =20 Motor K=2.45 Θ o Consider first the case where the motor steadystate gain = 2.45
Control 2 Proportional and Integral control 1 Disturbance rejection in Proportional Control Θ i =5 + _ Controller K P =20 Motor K=2.45 Θ o Consider first the case where the motor steadystate gain = 2.45
EE 422G - Signals and Systems Laboratory
 EE 4G - Signals and Systems Laboratory Lab 9 PID Control Kevin D. Donohue Department of Electrical and Computer Engineering University of Kentucky Lexington, KY 40506 April, 04 Objectives: Identify the
EE 4G - Signals and Systems Laboratory Lab 9 PID Control Kevin D. Donohue Department of Electrical and Computer Engineering University of Kentucky Lexington, KY 40506 April, 04 Objectives: Identify the
Lecture 20 Aspects of Control
 CS 460/560 Introduction to Computational Robotics Fall 2017, Rutgers University Lecture 20 Aspects of Control Instructor: Jingjin Yu Outline Feedback (closed-loop) control Mathematical models of dynamical
CS 460/560 Introduction to Computational Robotics Fall 2017, Rutgers University Lecture 20 Aspects of Control Instructor: Jingjin Yu Outline Feedback (closed-loop) control Mathematical models of dynamical
Goodwin, Graebe, Salgado, Prentice Hall Chapter 11. Chapter 11. Dealing with Constraints
 Chapter 11 Dealing with Constraints Topics to be covered An ubiquitous problem in control is that all real actuators have limited authority. This implies that they are constrained in amplitude and/or rate
Chapter 11 Dealing with Constraints Topics to be covered An ubiquitous problem in control is that all real actuators have limited authority. This implies that they are constrained in amplitude and/or rate
Video 5.1 Vijay Kumar and Ani Hsieh
 Video 5.1 Vijay Kumar and Ani Hsieh Robo3x-1.1 1 The Purpose of Control Input/Stimulus/ Disturbance System or Plant Output/ Response Understand the Black Box Evaluate the Performance Change the Behavior
Video 5.1 Vijay Kumar and Ani Hsieh Robo3x-1.1 1 The Purpose of Control Input/Stimulus/ Disturbance System or Plant Output/ Response Understand the Black Box Evaluate the Performance Change the Behavior
School of Mechanical Engineering Purdue University. ME375 Feedback Control - 1
 Introduction to Feedback Control Control System Design Why Control? Open-Loop vs Closed-Loop (Feedback) Why Use Feedback Control? Closed-Loop Control System Structure Elements of a Feedback Control System
Introduction to Feedback Control Control System Design Why Control? Open-Loop vs Closed-Loop (Feedback) Why Use Feedback Control? Closed-Loop Control System Structure Elements of a Feedback Control System
Robotics. Dynamics. Marc Toussaint U Stuttgart
 Robotics Dynamics 1D point mass, damping & oscillation, PID, dynamics of mechanical systems, Euler-Lagrange equation, Newton-Euler recursion, general robot dynamics, joint space control, reference trajectory
Robotics Dynamics 1D point mass, damping & oscillation, PID, dynamics of mechanical systems, Euler-Lagrange equation, Newton-Euler recursion, general robot dynamics, joint space control, reference trajectory
Example: DC Motor Speed Modeling
 Page 1 of 5 Example: DC Motor Speed Modeling Physical setup and system equations Design requirements MATLAB representation and open-loop response Physical setup and system equations A common actuator in
Page 1 of 5 Example: DC Motor Speed Modeling Physical setup and system equations Design requirements MATLAB representation and open-loop response Physical setup and system equations A common actuator in
Introduction to Process Control
 Introduction to Process Control For more visit :- www.mpgirnari.in By: M. P. Girnari (SSEC, Bhavnagar) For more visit:- www.mpgirnari.in 1 Contents: Introduction Process control Dynamics Stability The
Introduction to Process Control For more visit :- www.mpgirnari.in By: M. P. Girnari (SSEC, Bhavnagar) For more visit:- www.mpgirnari.in 1 Contents: Introduction Process control Dynamics Stability The
Feedback Basics. David M. Auslander Mechanical Engineering University of California at Berkeley. copyright 1998, D.M. Auslander
 Feedback Basics David M. Auslander Mechanical Engineering University of California at Berkeley copyright 1998, D.M. Auslander 1 I. Feedback Control Context 2 What is Feedback Control? Measure desired behavior
Feedback Basics David M. Auslander Mechanical Engineering University of California at Berkeley copyright 1998, D.M. Auslander 1 I. Feedback Control Context 2 What is Feedback Control? Measure desired behavior
B1-1. Closed-loop control. Chapter 1. Fundamentals of closed-loop control technology. Festo Didactic Process Control System
 B1-1 Chapter 1 Fundamentals of closed-loop control technology B1-2 This chapter outlines the differences between closed-loop and openloop control and gives an introduction to closed-loop control technology.
B1-1 Chapter 1 Fundamentals of closed-loop control technology B1-2 This chapter outlines the differences between closed-loop and openloop control and gives an introduction to closed-loop control technology.
Robotics. Dynamics. University of Stuttgart Winter 2018/19
 Robotics Dynamics 1D point mass, damping & oscillation, PID, dynamics of mechanical systems, Euler-Lagrange equation, Newton-Euler, joint space control, reference trajectory following, optimal operational
Robotics Dynamics 1D point mass, damping & oscillation, PID, dynamics of mechanical systems, Euler-Lagrange equation, Newton-Euler, joint space control, reference trajectory following, optimal operational
Dr Ian R. Manchester
 Week Content Notes 1 Introduction 2 Frequency Domain Modelling 3 Transient Performance and the s-plane 4 Block Diagrams 5 Feedback System Characteristics Assign 1 Due 6 Root Locus 7 Root Locus 2 Assign
Week Content Notes 1 Introduction 2 Frequency Domain Modelling 3 Transient Performance and the s-plane 4 Block Diagrams 5 Feedback System Characteristics Assign 1 Due 6 Root Locus 7 Root Locus 2 Assign
EE 474 Lab Part 2: Open-Loop and Closed-Loop Control (Velocity Servo)
") Contents EE 474 Lab Part 2: Open-Loop and Closed-Loop Control (Velocity Servo) 1 Introduction 1 1.1 Discovery learning in the Controls Teaching Laboratory.............. 1 1.2 A Laboratory Notebook...............................
Contents EE 474 Lab Part 2: Open-Loop and Closed-Loop Control (Velocity Servo) 1 Introduction 1 1.1 Discovery learning in the Controls Teaching Laboratory.............. 1 1.2 A Laboratory Notebook...............................
Systems Engineering/Process Control L1
 Systems Engineering/Process Control L1 What is Systems Engineering/Process Control? Graphical system representations Fundamental control principles Reading: Systems Engineering and Process Control: 1.1
Systems Engineering/Process Control L1 What is Systems Engineering/Process Control? Graphical system representations Fundamental control principles Reading: Systems Engineering and Process Control: 1.1
MASSACHUSETTS INSTITUTE OF TECHNOLOGY Department of Mechanical Engineering 2.04A Systems and Controls Spring 2013
 MASSACHUSETTS INSTITUTE OF TECHNOLOGY Department of Mechanical Engineering 2.04A Systems and Controls Spring 2013 Problem Set #4 Posted: Thursday, Mar. 7, 13 Due: Thursday, Mar. 14, 13 1. Sketch the Root
MASSACHUSETTS INSTITUTE OF TECHNOLOGY Department of Mechanical Engineering 2.04A Systems and Controls Spring 2013 Problem Set #4 Posted: Thursday, Mar. 7, 13 Due: Thursday, Mar. 14, 13 1. Sketch the Root
ECE1750, Spring Week 11 Power Electronics
 ECE1750, Spring 2017 Week 11 Power Electronics Control 1 Power Electronic Circuits Control In most power electronic applications we need to control some variable, such as the put voltage of a dc-dc converter,
ECE1750, Spring 2017 Week 11 Power Electronics Control 1 Power Electronic Circuits Control In most power electronic applications we need to control some variable, such as the put voltage of a dc-dc converter,
Lecture 9 Nonlinear Control Design. Course Outline. Exact linearization: example [one-link robot] Exact Feedback Linearization
![Lecture 9 Nonlinear Control Design. Course Outline. Exact linearization: example [one-link robot] Exact Feedback Linearization](/thumbs/83/87856505.jpg "Lecture 9 Nonlinear Control Design. Course Outline. Exact linearization: example [one-link robot] Exact Feedback Linearization") Lecture 9 Nonlinear Control Design Course Outline Eact-linearization Lyapunov-based design Lab Adaptive control Sliding modes control Literature: [Khalil, ch.s 13, 14.1,14.] and [Glad-Ljung,ch.17] Lecture
Lecture 9 Nonlinear Control Design Course Outline Eact-linearization Lyapunov-based design Lab Adaptive control Sliding modes control Literature: [Khalil, ch.s 13, 14.1,14.] and [Glad-Ljung,ch.17] Lecture
CM 3310 Process Control, Spring Lecture 21
 CM 331 Process Control, Spring 217 Instructor: Dr. om Co Lecture 21 (Back to Process Control opics ) General Control Configurations and Schemes. a) Basic Single-Input/Single-Output (SISO) Feedback Figure
CM 331 Process Control, Spring 217 Instructor: Dr. om Co Lecture 21 (Back to Process Control opics ) General Control Configurations and Schemes. a) Basic Single-Input/Single-Output (SISO) Feedback Figure
EE 3CL4: Introduction to Control Systems Lab 4: Lead Compensation
 EE 3CL4: Introduction to Control Systems Lab 4: Lead Compensation Tim Davidson Ext. 27352 davidson@mcmaster.ca Objective To use the root locus technique to design a lead compensator for a marginally-stable
EE 3CL4: Introduction to Control Systems Lab 4: Lead Compensation Tim Davidson Ext. 27352 davidson@mcmaster.ca Objective To use the root locus technique to design a lead compensator for a marginally-stable
Systems Engineering/Process Control L1
 Systems Engineering/Process Control L1 What is Systems Engineering/Process Control? Graphical system representations Fundamental control principles Reading: Systems Engineering and Process Control: 1.1
Systems Engineering/Process Control L1 What is Systems Engineering/Process Control? Graphical system representations Fundamental control principles Reading: Systems Engineering and Process Control: 1.1
2.004 Dynamics and Control II Spring 2008
 MIT OpenCourseWare http://ocw.mit.edu 2.004 Dynamics and Control II Spring 2008 or information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. 2 I C + 4 * Massachusetts
MIT OpenCourseWare http://ocw.mit.edu 2.004 Dynamics and Control II Spring 2008 or information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. 2 I C + 4 * Massachusetts
Control of Manufacturing Processes
 Control of Manufacturing Processes Subject 2.830 Spring 2004 Lecture #18 Basic Control Loop Analysis" April 15, 2004 Revisit Temperature Control Problem τ dy dt + y = u τ = time constant = gain y ss =
Control of Manufacturing Processes Subject 2.830 Spring 2004 Lecture #18 Basic Control Loop Analysis" April 15, 2004 Revisit Temperature Control Problem τ dy dt + y = u τ = time constant = gain y ss =
R a) Compare open loop and closed loop control systems. b) Clearly bring out, from basics, Force-current and Force-Voltage analogies.
 Compare open loop and closed loop control systems. b) Clearly bring out, from basics, Force-current and Force-Voltage analogies.") SET - 1 II B. Tech II Semester Supplementary Examinations Dec 01 1. a) Compare open loop and closed loop control systems. b) Clearly bring out, from basics, Force-current and Force-Voltage analogies..
SET - 1 II B. Tech II Semester Supplementary Examinations Dec 01 1. a) Compare open loop and closed loop control systems. b) Clearly bring out, from basics, Force-current and Force-Voltage analogies..
Fundamental Principles of Process Control
 Fundamental Principles of Process Control Motivation for Process Control Safety First: people, environment, equipment The Profit Motive: meeting final product specs minimizing waste production minimizing
Fundamental Principles of Process Control Motivation for Process Control Safety First: people, environment, equipment The Profit Motive: meeting final product specs minimizing waste production minimizing
Stable Limit Cycle Generation for Underactuated Mechanical Systems, Application: Inertia Wheel Inverted Pendulum
 Stable Limit Cycle Generation for Underactuated Mechanical Systems, Application: Inertia Wheel Inverted Pendulum Sébastien Andary Ahmed Chemori Sébastien Krut LIRMM, Univ. Montpellier - CNRS, 6, rue Ada
Stable Limit Cycle Generation for Underactuated Mechanical Systems, Application: Inertia Wheel Inverted Pendulum Sébastien Andary Ahmed Chemori Sébastien Krut LIRMM, Univ. Montpellier - CNRS, 6, rue Ada
State space control for the Two degrees of freedom Helicopter
 State space control for the Two degrees of freedom Helicopter AAE364L In this Lab we will use state space methods to design a controller to fly the two degrees of freedom helicopter. 1 The state space
State space control for the Two degrees of freedom Helicopter AAE364L In this Lab we will use state space methods to design a controller to fly the two degrees of freedom helicopter. 1 The state space
Analysis and Design of Control Systems in the Time Domain
 Chapter 6 Analysis and Design of Control Systems in the Time Domain 6. Concepts of feedback control Given a system, we can classify it as an open loop or a closed loop depends on the usage of the feedback.
Chapter 6 Analysis and Design of Control Systems in the Time Domain 6. Concepts of feedback control Given a system, we can classify it as an open loop or a closed loop depends on the usage of the feedback.
Optimal Control. McGill COMP 765 Oct 3 rd, 2017
 Optimal Control McGill COMP 765 Oct 3 rd, 2017 Classical Control Quiz Question 1: Can a PID controller be used to balance an inverted pendulum: A) That starts upright? B) That must be swung-up (perhaps
Optimal Control McGill COMP 765 Oct 3 rd, 2017 Classical Control Quiz Question 1: Can a PID controller be used to balance an inverted pendulum: A) That starts upright? B) That must be swung-up (perhaps
D(s) G(s) A control system design definition
 G(s) A control system design definition") R E Compensation D(s) U Plant G(s) Y Figure 7. A control system design definition x x x 2 x 2 U 2 s s 7 2 Y Figure 7.2 A block diagram representing Eq. (7.) in control form z U 2 s z Y 4 z 2 s z 2 3 Figure
R E Compensation D(s) U Plant G(s) Y Figure 7. A control system design definition x x x 2 x 2 U 2 s s 7 2 Y Figure 7.2 A block diagram representing Eq. (7.) in control form z U 2 s z Y 4 z 2 s z 2 3 Figure
Analysis and Design of Hybrid AI/Control Systems
 Analysis and Design of Hybrid AI/Control Systems Glen Henshaw, PhD (formerly) Space Systems Laboratory University of Maryland,College Park 13 May 2011 Dynamically Complex Vehicles Increased deployment
Analysis and Design of Hybrid AI/Control Systems Glen Henshaw, PhD (formerly) Space Systems Laboratory University of Maryland,College Park 13 May 2011 Dynamically Complex Vehicles Increased deployment
Subject: Introduction to Process Control. Week 01, Lectures 01 02, Spring Content
 v CHEG 461 : Process Dynamics and Control Subject: Introduction to Process Control Week 01, Lectures 01 02, Spring 2014 Dr. Costas Kiparissides Content 1. Introduction to Process Dynamics and Control 2.
v CHEG 461 : Process Dynamics and Control Subject: Introduction to Process Control Week 01, Lectures 01 02, Spring 2014 Dr. Costas Kiparissides Content 1. Introduction to Process Dynamics and Control 2.
06 Feedback Control System Characteristics The role of error signals to characterize feedback control system performance.
 Chapter 06 Feedback 06 Feedback Control System Characteristics The role of error signals to characterize feedback control system performance. Lesson of the Course Fondamenti di Controlli Automatici of
Chapter 06 Feedback 06 Feedback Control System Characteristics The role of error signals to characterize feedback control system performance. Lesson of the Course Fondamenti di Controlli Automatici of
Rhythmic Robot Arm Control Using Oscillators
 Rhythmic Robot Arm Control Using Oscillators Matthew M. Williamson MIT AI Lab, 545 Technology Square, Cambridge, MA 2139 http://www.ai.mit.edu/people/matt Abstract This paper presents an approach to robot
Rhythmic Robot Arm Control Using Oscillators Matthew M. Williamson MIT AI Lab, 545 Technology Square, Cambridge, MA 2139 http://www.ai.mit.edu/people/matt Abstract This paper presents an approach to robot
DC Motor Position: System Modeling
 1 of 7 01/03/2014 22:07 Tips Effects TIPS ABOUT BASICS INDEX NEXT INTRODUCTION CRUISE CONTROL MOTOR SPEED MOTOR POSITION SUSPENSION INVERTED PENDULUM SYSTEM MODELING ANALYSIS DC Motor Position: System
1 of 7 01/03/2014 22:07 Tips Effects TIPS ABOUT BASICS INDEX NEXT INTRODUCTION CRUISE CONTROL MOTOR SPEED MOTOR POSITION SUSPENSION INVERTED PENDULUM SYSTEM MODELING ANALYSIS DC Motor Position: System
(a) Find the transfer function of the amplifier. Ans.: G(s) =
 Find the transfer function of the amplifier. Ans.: G(s) =") 126 INTRDUCTIN T CNTR ENGINEERING 10( s 1) (a) Find the transfer function of the amplifier. Ans.: (. 02s 1)(. 001s 1) (b) Find the expected percent overshoot for a step input for the closed-loop system
126 INTRDUCTIN T CNTR ENGINEERING 10( s 1) (a) Find the transfer function of the amplifier. Ans.: (. 02s 1)(. 001s 1) (b) Find the expected percent overshoot for a step input for the closed-loop system
DC-motor PID control
 DC-motor PID control This version: November 1, 2017 REGLERTEKNIK Name: P-number: AUTOMATIC LINKÖPING CONTROL Date: Passed: Chapter 1 Introduction The purpose of this lab is to give an introduction to
DC-motor PID control This version: November 1, 2017 REGLERTEKNIK Name: P-number: AUTOMATIC LINKÖPING CONTROL Date: Passed: Chapter 1 Introduction The purpose of this lab is to give an introduction to
Dynamics and control of mechanical systems
 Dynamics and control of mechanical systems Date Day 1 (03/05) - 05/05 Day 2 (07/05) Day 3 (09/05) Day 4 (11/05) Day 5 (14/05) Day 6 (16/05) Content Review of the basics of mechanics. Kinematics of rigid
Dynamics and control of mechanical systems Date Day 1 (03/05) - 05/05 Day 2 (07/05) Day 3 (09/05) Day 4 (11/05) Day 5 (14/05) Day 6 (16/05) Content Review of the basics of mechanics. Kinematics of rigid
Inverted Pendulum: State-Space Methods for Controller Design
 1 de 12 18/10/2015 22:45 Tips Effects TIPS ABOUT BASICS HARDWARE INDEX NEXT INTRODUCTION CRUISE CONTROL MOTOR SPEED MOTOR POSITION SYSTEM MODELING ANALYSIS Inverted Pendulum: State-Space Methods for Controller
1 de 12 18/10/2015 22:45 Tips Effects TIPS ABOUT BASICS HARDWARE INDEX NEXT INTRODUCTION CRUISE CONTROL MOTOR SPEED MOTOR POSITION SYSTEM MODELING ANALYSIS Inverted Pendulum: State-Space Methods for Controller
Position with Force Feedback Control of Manipulator Arm
 Position with Force Feedback Control of Manipulator Arm 1 B. K. Chitra, 2 J. Nandha Gopal, 3 Dr. K. Rajeswari PG Student, Department of EIE Assistant Professor, Professor, Department of EEE Abstract This
Position with Force Feedback Control of Manipulator Arm 1 B. K. Chitra, 2 J. Nandha Gopal, 3 Dr. K. Rajeswari PG Student, Department of EIE Assistant Professor, Professor, Department of EEE Abstract This
Pitch Rate CAS Design Project
 Pitch Rate CAS Design Project Washington University in St. Louis MAE 433 Control Systems Bob Rowe 4.4.7 Design Project Part 2 This is the second part of an ongoing project to design a control and stability
Pitch Rate CAS Design Project Washington University in St. Louis MAE 433 Control Systems Bob Rowe 4.4.7 Design Project Part 2 This is the second part of an ongoing project to design a control and stability
Control System Design
 ELEC ENG 4CL4: Control System Design Notes for Lecture #24 Wednesday, March 10, 2004 Dr. Ian C. Bruce Room: CRL-229 Phone ext.: 26984 Email: ibruce@mail.ece.mcmaster.ca Remedies We next turn to the question
ELEC ENG 4CL4: Control System Design Notes for Lecture #24 Wednesday, March 10, 2004 Dr. Ian C. Bruce Room: CRL-229 Phone ext.: 26984 Email: ibruce@mail.ece.mcmaster.ca Remedies We next turn to the question
Overview of the Seminar Topic
 Overview of the Seminar Topic Simo Särkkä Laboratory of Computational Engineering Helsinki University of Technology September 17, 2007 Contents 1 What is Control Theory? 2 History
Overview of the Seminar Topic Simo Särkkä Laboratory of Computational Engineering Helsinki University of Technology September 17, 2007 Contents 1 What is Control Theory? 2 History
Unit 8: Part 2: PD, PID, and Feedback Compensation
 Ideal Derivative Compensation (PD) Lead Compensation PID Controller Design Feedback Compensation Physical Realization of Compensation Unit 8: Part 2: PD, PID, and Feedback Compensation Engineering 5821:
Ideal Derivative Compensation (PD) Lead Compensation PID Controller Design Feedback Compensation Physical Realization of Compensation Unit 8: Part 2: PD, PID, and Feedback Compensation Engineering 5821:
Course Outline. Higher Order Poles: Example. Higher Order Poles. Amme 3500 : System Dynamics & Control. State Space Design. 1 G(s) = s(s + 2)(s +10)
 = s(s + 2)(s +10)") Amme 35 : System Dynamics Control State Space Design Course Outline Week Date Content Assignment Notes 1 1 Mar Introduction 2 8 Mar Frequency Domain Modelling 3 15 Mar Transient Performance and the s-plane
Amme 35 : System Dynamics Control State Space Design Course Outline Week Date Content Assignment Notes 1 1 Mar Introduction 2 8 Mar Frequency Domain Modelling 3 15 Mar Transient Performance and the s-plane
Lab 6a: Pole Placement for the Inverted Pendulum
 Lab 6a: Pole Placement for the Inverted Pendulum Idiot. Above her head was the only stable place in the cosmos, the only refuge from the damnation of the Panta Rei, and she guessed it was the Pendulum
Lab 6a: Pole Placement for the Inverted Pendulum Idiot. Above her head was the only stable place in the cosmos, the only refuge from the damnation of the Panta Rei, and she guessed it was the Pendulum
Example: Modeling DC Motor Position Physical Setup System Equations Design Requirements MATLAB Representation and Open-Loop Response
 Page 1 of 5 Example: Modeling DC Motor Position Physical Setup System Equations Design Requirements MATLAB Representation and Open-Loop Response Physical Setup A common actuator in control systems is the
Page 1 of 5 Example: Modeling DC Motor Position Physical Setup System Equations Design Requirements MATLAB Representation and Open-Loop Response Physical Setup A common actuator in control systems is the
Quanser NI-ELVIS Trainer (QNET) Series: QNET Experiment #02: DC Motor Position Control. DC Motor Control Trainer (DCMCT) Student Manual
 Series: QNET Experiment #02: DC Motor Position Control. DC Motor Control Trainer (DCMCT) Student Manual") Quanser NI-ELVIS Trainer (QNET) Series: QNET Experiment #02: DC Motor Position Control DC Motor Control Trainer (DCMCT) Student Manual Table of Contents 1 Laboratory Objectives1 2 References1 3 DCMCT Plant
Quanser NI-ELVIS Trainer (QNET) Series: QNET Experiment #02: DC Motor Position Control DC Motor Control Trainer (DCMCT) Student Manual Table of Contents 1 Laboratory Objectives1 2 References1 3 DCMCT Plant
Feedback Control of Linear SISO systems. Process Dynamics and Control
 Feedback Control of Linear SISO systems Process Dynamics and Control 1 Open-Loop Process The study of dynamics was limited to open-loop systems Observe process behavior as a result of specific input signals
Feedback Control of Linear SISO systems Process Dynamics and Control 1 Open-Loop Process The study of dynamics was limited to open-loop systems Observe process behavior as a result of specific input signals
Automatic Generation Control. Meth Bandara and Hassan Oukacha
 Automatic Generation Control Meth Bandara and Hassan Oukacha EE194 Advanced Controls Theory February 25, 2013 Outline Introduction System Modeling Single Generator AGC Going Forward Conclusion Introduction
Automatic Generation Control Meth Bandara and Hassan Oukacha EE194 Advanced Controls Theory February 25, 2013 Outline Introduction System Modeling Single Generator AGC Going Forward Conclusion Introduction
General procedure for formulation of robot dynamics STEP 1 STEP 3. Module 9 : Robot Dynamics & controls
 Module 9 : Robot Dynamics & controls Lecture 32 : General procedure for dynamics equation forming and introduction to control Objectives In this course you will learn the following Lagrangian Formulation
Module 9 : Robot Dynamics & controls Lecture 32 : General procedure for dynamics equation forming and introduction to control Objectives In this course you will learn the following Lagrangian Formulation
PID Control. Objectives
 PID Control Objectives The objective of this lab is to study basic design issues for proportional-integral-derivative control laws. Emphasis is placed on transient responses and steady-state errors. The
PID Control Objectives The objective of this lab is to study basic design issues for proportional-integral-derivative control laws. Emphasis is placed on transient responses and steady-state errors. The
Lecture 9 Nonlinear Control Design
 Lecture 9 Nonlinear Control Design Exact-linearization Lyapunov-based design Lab 2 Adaptive control Sliding modes control Literature: [Khalil, ch.s 13, 14.1,14.2] and [Glad-Ljung,ch.17] Course Outline
Lecture 9 Nonlinear Control Design Exact-linearization Lyapunov-based design Lab 2 Adaptive control Sliding modes control Literature: [Khalil, ch.s 13, 14.1,14.2] and [Glad-Ljung,ch.17] Course Outline
Open Loop Tuning Rules
 Open Loop Tuning Rules Based on approximate process models Process Reaction Curve: The process reaction curve is an approximate model of the process, assuming the process behaves as a first order plus
Open Loop Tuning Rules Based on approximate process models Process Reaction Curve: The process reaction curve is an approximate model of the process, assuming the process behaves as a first order plus
What is flight dynamics? AE540: Flight Dynamics and Control I. What is flight control? Is the study of aircraft motion and its characteristics.
 KING FAHD UNIVERSITY Department of Aerospace Engineering AE540: Flight Dynamics and Control I Instructor Dr. Ayman Hamdy Kassem What is flight dynamics? Is the study of aircraft motion and its characteristics.
KING FAHD UNIVERSITY Department of Aerospace Engineering AE540: Flight Dynamics and Control I Instructor Dr. Ayman Hamdy Kassem What is flight dynamics? Is the study of aircraft motion and its characteristics.
Robot Dynamics - Rotary Wing UAS: Control of a Quadrotor
 Robot Dynamics Rotary Wing AS: Control of a Quadrotor 5-85- V Marco Hutter, Roland Siegwart and Thomas Stastny Robot Dynamics - Rotary Wing AS: Control of a Quadrotor 7..6 Contents Rotary Wing AS. Introduction
Robot Dynamics Rotary Wing AS: Control of a Quadrotor 5-85- V Marco Hutter, Roland Siegwart and Thomas Stastny Robot Dynamics - Rotary Wing AS: Control of a Quadrotor 7..6 Contents Rotary Wing AS. Introduction
MEAM 510 Fall 2012 Bruce D. Kothmann
 Balancing g Robot Control MEAM 510 Fall 2012 Bruce D. Kothmann Agenda Bruce s Controls Resume Simple Mechanics (Statics & Dynamics) of the Balancing Robot Basic Ideas About Feedback & Stability Effects
Balancing g Robot Control MEAM 510 Fall 2012 Bruce D. Kothmann Agenda Bruce s Controls Resume Simple Mechanics (Statics & Dynamics) of the Balancing Robot Basic Ideas About Feedback & Stability Effects
Automatic Control (TSRT15): Lecture 1
: Lecture 1") Automatic Control (TSRT15): Lecture 1 Tianshi Chen* Division of Automatic Control Dept. of Electrical Engineering Email: tschen@isy.liu.se Phone: 13-282226 Office: B-house extrance 25-27 * All lecture
Automatic Control (TSRT15): Lecture 1 Tianshi Chen* Division of Automatic Control Dept. of Electrical Engineering Email: tschen@isy.liu.se Phone: 13-282226 Office: B-house extrance 25-27 * All lecture
SIMULATION SUITE CHEMCAD SOFTWARE PROCESS CONTROL SYSTEMS PROCESS CONTROL SYSTEMS COURSE WITH CHEMCAD MODELS. Application > Design > Adjustment
 COURSE WITH CHEMCAD MODELS PROCESS CONTROL SYSTEMS Application > Design > Adjustment Based on F.G. Shinskey s 1967 Edition Presenter John Edwards P & I Design Ltd, UK Contact: jee@pidesign.co.uk COURSE
COURSE WITH CHEMCAD MODELS PROCESS CONTROL SYSTEMS Application > Design > Adjustment Based on F.G. Shinskey s 1967 Edition Presenter John Edwards P & I Design Ltd, UK Contact: jee@pidesign.co.uk COURSE
Teaching State Variable Feedback to Technology Students Using MATLAB and SIMULINK
 Teaching State Variable Feedback to Technology Students Using MATLAB and SIMULINK Kathleen A.K. Ossman, Ph.D. University of Cincinnati Session 448 I. Introduction This paper describes a course and laboratory
Teaching State Variable Feedback to Technology Students Using MATLAB and SIMULINK Kathleen A.K. Ossman, Ph.D. University of Cincinnati Session 448 I. Introduction This paper describes a course and laboratory
Control Systems Design
 ELEC4410 Control Systems Design Lecture 18: State Feedback Tracking and State Estimation Julio H. Braslavsky julio@ee.newcastle.edu.au School of Electrical Engineering and Computer Science Lecture 18:
ELEC4410 Control Systems Design Lecture 18: State Feedback Tracking and State Estimation Julio H. Braslavsky julio@ee.newcastle.edu.au School of Electrical Engineering and Computer Science Lecture 18:
Control of Manufacturing Processes
 Control of Manufacturing Processes Subject 2.830 Spring 2004 Lecture #19 Position Control and Root Locus Analysis" April 22, 2004 The Position Servo Problem, reference position NC Control Robots Injection
Control of Manufacturing Processes Subject 2.830 Spring 2004 Lecture #19 Position Control and Root Locus Analysis" April 22, 2004 The Position Servo Problem, reference position NC Control Robots Injection
Tuning of Internal Model Control Proportional Integral Derivative Controller for Optimized Control
 Tuning of Internal Model Control Proportional Integral Derivative Controller for Optimized Control Thesis submitted in partial fulfilment of the requirement for the award of Degree of MASTER OF ENGINEERING
Tuning of Internal Model Control Proportional Integral Derivative Controller for Optimized Control Thesis submitted in partial fulfilment of the requirement for the award of Degree of MASTER OF ENGINEERING
International Journal of Advance Research in Computer Science and Management Studies
 Volume 2, Issue 9, September 2014 ISSN: 2321 7782 (Online) International Journal of Advance Research in Computer Science and Management Studies Research Article / Survey Paper / Case Study Available online
Volume 2, Issue 9, September 2014 ISSN: 2321 7782 (Online) International Journal of Advance Research in Computer Science and Management Studies Research Article / Survey Paper / Case Study Available online
Competences. The smart choice of Fluid Control Systems
 Competences The smart choice of Fluid Control Systems Contents 1. Open-loop and closed-loop control Page 4 1.1. Function and sequence of an open-loop control system Page 4 1.2. Function and sequence of
Competences The smart choice of Fluid Control Systems Contents 1. Open-loop and closed-loop control Page 4 1.1. Function and sequence of an open-loop control system Page 4 1.2. Function and sequence of
IVR: Introduction to Control (IV)
") IVR: Introduction to Control (IV) 16/11/2010 Proportional error control (P) Example Control law: V B = M k 2 R ds dt + k 1s V B = K ( ) s goal s Convenient, simple, powerful (fast and proportional reaction
IVR: Introduction to Control (IV) 16/11/2010 Proportional error control (P) Example Control law: V B = M k 2 R ds dt + k 1s V B = K ( ) s goal s Convenient, simple, powerful (fast and proportional reaction
6.003: Signals and Systems
 6.003: Signals and Systems CT Feedback and Control October 20, 2011 1 Mid-term Examination #2 Wednesday, October 26, 7:30-9:30pm, No recitations on the day of the exam. Coverage: Lectures 1 12 Recitations
6.003: Signals and Systems CT Feedback and Control October 20, 2011 1 Mid-term Examination #2 Wednesday, October 26, 7:30-9:30pm, No recitations on the day of the exam. Coverage: Lectures 1 12 Recitations
GAIN SCHEDULING CONTROL WITH MULTI-LOOP PID FOR 2- DOF ARM ROBOT TRAJECTORY CONTROL
 GAIN SCHEDULING CONTROL WITH MULTI-LOOP PID FOR 2- DOF ARM ROBOT TRAJECTORY CONTROL 1 KHALED M. HELAL, 2 MOSTAFA R.A. ATIA, 3 MOHAMED I. ABU EL-SEBAH 1, 2 Mechanical Engineering Department ARAB ACADEMY
GAIN SCHEDULING CONTROL WITH MULTI-LOOP PID FOR 2- DOF ARM ROBOT TRAJECTORY CONTROL 1 KHALED M. HELAL, 2 MOSTAFA R.A. ATIA, 3 MOHAMED I. ABU EL-SEBAH 1, 2 Mechanical Engineering Department ARAB ACADEMY
DESIGN MICROELECTRONICS ELCT 703 (W17) LECTURE 3: OP-AMP CMOS CIRCUIT. Dr. Eman Azab Assistant Professor Office: C
 LECTURE 3: OP-AMP CMOS CIRCUIT. Dr. Eman Azab Assistant Professor Office: C") MICROELECTRONICS ELCT 703 (W17) LECTURE 3: OP-AMP CMOS CIRCUIT DESIGN Dr. Eman Azab Assistant Professor Office: C3.315 E-mail: eman.azab@guc.edu.eg 1 TWO STAGE CMOS OP-AMP It consists of two stages: First
MICROELECTRONICS ELCT 703 (W17) LECTURE 3: OP-AMP CMOS CIRCUIT DESIGN Dr. Eman Azab Assistant Professor Office: C3.315 E-mail: eman.azab@guc.edu.eg 1 TWO STAGE CMOS OP-AMP It consists of two stages: First
Chap 8. State Feedback and State Estimators
 Chap 8. State Feedback and State Estimators Outlines Introduction State feedback Regulation and tracking State estimator Feedback from estimated states State feedback-multivariable case State estimators-multivariable
Chap 8. State Feedback and State Estimators Outlines Introduction State feedback Regulation and tracking State estimator Feedback from estimated states State feedback-multivariable case State estimators-multivariable
Control Lab. Thermal Plant. Chriss Grimholt
 Control Lab Thermal Plant Chriss Grimholt Process System Engineering Department of Chemical Engineering Norwegian University of Science and Technology October 3, 23 C. Grimholt (NTNU) Thermal Plant October
Control Lab Thermal Plant Chriss Grimholt Process System Engineering Department of Chemical Engineering Norwegian University of Science and Technology October 3, 23 C. Grimholt (NTNU) Thermal Plant October
Linear Experiment #11: LQR Control. Linear Flexible Joint Cart Plus Single Inverted Pendulum (LFJC+SIP) Student Handout
 Student Handout") Linear Motion Servo Plants: IP01 or IP02 Linear Experiment #11: LQR Control Linear Flexible Joint Cart Plus Single Inverted Pendulum (LFJC+SIP) Student Handout Table of Contents 1. Objectives...1 2. Prerequisites...2
Linear Motion Servo Plants: IP01 or IP02 Linear Experiment #11: LQR Control Linear Flexible Joint Cart Plus Single Inverted Pendulum (LFJC+SIP) Student Handout Table of Contents 1. Objectives...1 2. Prerequisites...2
EXAMPLES EXAMPLE - Temperature in building
 DYNAMICAL SYSTEMS EXAMPLES EXAMPLE - Temperature in building Energy balance: Rate of change = [Inflow of energy] [Outflow of energy] of stored energy where Rate of change of stored energy = cρv dt (c =
DYNAMICAL SYSTEMS EXAMPLES EXAMPLE - Temperature in building Energy balance: Rate of change = [Inflow of energy] [Outflow of energy] of stored energy where Rate of change of stored energy = cρv dt (c =
CBE507 LECTURE III Controller Design Using State-space Methods. Professor Dae Ryook Yang
 CBE507 LECTURE III Controller Design Using State-space Methods Professor Dae Ryook Yang Fall 2013 Dept. of Chemical and Biological Engineering Korea University Korea University III -1 Overview States What
CBE507 LECTURE III Controller Design Using State-space Methods Professor Dae Ryook Yang Fall 2013 Dept. of Chemical and Biological Engineering Korea University Korea University III -1 Overview States What
5HC99 Embedded Vision Control. Feedback Control Systems. dr. Dip Goswami Flux Department of Electrical Engineering
 5HC99 Embedded Vision Control Feedback Control Systems dr. Dip Goswami d.goswami@tue.nl Flux 04.135 Department of Electrical Engineering 1 Example Feedback control system: regulates the behavior of dynamical
5HC99 Embedded Vision Control Feedback Control Systems dr. Dip Goswami d.goswami@tue.nl Flux 04.135 Department of Electrical Engineering 1 Example Feedback control system: regulates the behavior of dynamical
(Refer Slide Time: 1:42)
") Control Engineering Prof. Madan Gopal Department of Electrical Engineering Indian Institute of Technology, Delhi Lecture - 21 Basic Principles of Feedback Control (Contd..) Friends, let me get started
Control Engineering Prof. Madan Gopal Department of Electrical Engineering Indian Institute of Technology, Delhi Lecture - 21 Basic Principles of Feedback Control (Contd..) Friends, let me get started
Modeling and Analysis of Dynamic Systems
 Modeling and Analysis of Dynamic Systems by Dr. Guillaume Ducard Fall 2016 Institute for Dynamic Systems and Control ETH Zurich, Switzerland based on script from: Prof. Dr. Lino Guzzella 1/33 Outline 1
Modeling and Analysis of Dynamic Systems by Dr. Guillaume Ducard Fall 2016 Institute for Dynamic Systems and Control ETH Zurich, Switzerland based on script from: Prof. Dr. Lino Guzzella 1/33 Outline 1
Introduction to Control (034040) lecture no. 2
 lecture no. 2") Introduction to Control (034040) lecture no. 2 Leonid Mirkin Faculty of Mechanical Engineering Technion IIT Setup: Abstract control problem to begin with y P(s) u where P is a plant u is a control signal
Introduction to Control (034040) lecture no. 2 Leonid Mirkin Faculty of Mechanical Engineering Technion IIT Setup: Abstract control problem to begin with y P(s) u where P is a plant u is a control signal
Target Tracking Using Double Pendulum
 Target Tracking Using Double Pendulum Brian Spackman 1, Anusna Chakraborty 1 Department of Electrical and Computer Engineering Utah State University Abstract: This paper deals with the design, implementation
Target Tracking Using Double Pendulum Brian Spackman 1, Anusna Chakraborty 1 Department of Electrical and Computer Engineering Utah State University Abstract: This paper deals with the design, implementation
Digital Control Systems State Feedback Control
 Digital Control Systems State Feedback Control Illustrating the Effects of Closed-Loop Eigenvalue Location and Control Saturation for a Stable Open-Loop System Continuous-Time System Gs () Y() s 1 = =
Digital Control Systems State Feedback Control Illustrating the Effects of Closed-Loop Eigenvalue Location and Control Saturation for a Stable Open-Loop System Continuous-Time System Gs () Y() s 1 = =
Dr Ian R. Manchester Dr Ian R. Manchester AMME 3500 : Review
 Week Date Content Notes 1 6 Mar Introduction 2 13 Mar Frequency Domain Modelling 3 20 Mar Transient Performance and the s-plane 4 27 Mar Block Diagrams Assign 1 Due 5 3 Apr Feedback System Characteristics
Week Date Content Notes 1 6 Mar Introduction 2 13 Mar Frequency Domain Modelling 3 20 Mar Transient Performance and the s-plane 4 27 Mar Block Diagrams Assign 1 Due 5 3 Apr Feedback System Characteristics
sc Control Systems Design Q.1, Sem.1, Ac. Yr. 2010/11
 sc46 - Control Systems Design Q Sem Ac Yr / Mock Exam originally given November 5 9 Notes: Please be reminded that only an A4 paper with formulas may be used during the exam no other material is to be
sc46 - Control Systems Design Q Sem Ac Yr / Mock Exam originally given November 5 9 Notes: Please be reminded that only an A4 paper with formulas may be used during the exam no other material is to be
(Refer Slide Time: 00:01:30 min)
") Control Engineering Prof. M. Gopal Department of Electrical Engineering Indian Institute of Technology, Delhi Lecture - 3 Introduction to Control Problem (Contd.) Well friends, I have been giving you various
Control Engineering Prof. M. Gopal Department of Electrical Engineering Indian Institute of Technology, Delhi Lecture - 3 Introduction to Control Problem (Contd.) Well friends, I have been giving you various
EE 16B Midterm 2, March 21, Name: SID #: Discussion Section and TA: Lab Section and TA: Name of left neighbor: Name of right neighbor:
 EE 16B Midterm 2, March 21, 2017 Name: SID #: Discussion Section and TA: Lab Section and TA: Name of left neighbor: Name of right neighbor: Important Instructions: Show your work. An answer without explanation
EE 16B Midterm 2, March 21, 2017 Name: SID #: Discussion Section and TA: Lab Section and TA: Name of left neighbor: Name of right neighbor: Important Instructions: Show your work. An answer without explanation
Intelligent Systems and Control Prof. Laxmidhar Behera Indian Institute of Technology, Kanpur
 Intelligent Systems and Control Prof. Laxmidhar Behera Indian Institute of Technology, Kanpur Module - 2 Lecture - 4 Introduction to Fuzzy Logic Control In this lecture today, we will be discussing fuzzy
Intelligent Systems and Control Prof. Laxmidhar Behera Indian Institute of Technology, Kanpur Module - 2 Lecture - 4 Introduction to Fuzzy Logic Control In this lecture today, we will be discussing fuzzy
Systems Analysis and Control
 Systems Analysis and Control Matthew M. Peet Illinois Institute of Technology Lecture 12: Overview In this Lecture, you will learn: Review of Feedback Closing the Loop Pole Locations Changing the Gain
Systems Analysis and Control Matthew M. Peet Illinois Institute of Technology Lecture 12: Overview In this Lecture, you will learn: Review of Feedback Closing the Loop Pole Locations Changing the Gain
Reinforcement Learning and Control
 CS9 Lecture notes Andrew Ng Part XIII Reinforcement Learning and Control We now begin our study of reinforcement learning and adaptive control. In supervised learning, we saw algorithms that tried to make
CS9 Lecture notes Andrew Ng Part XIII Reinforcement Learning and Control We now begin our study of reinforcement learning and adaptive control. In supervised learning, we saw algorithms that tried to make
Important because SHM is a good model to describe vibrations of a guitar string, vibrations of atoms in molecules, etc.
 Simple Harmonic Motion Oscillatory motion under a restoring force proportional to the amount of displacement from equilibrium A restoring force is a force that tries to move the system back to equilibrium
Simple Harmonic Motion Oscillatory motion under a restoring force proportional to the amount of displacement from equilibrium A restoring force is a force that tries to move the system back to equilibrium