Revision 1.0, January 2014 MICRONIX USA, LLC
|
|
|
- Kristin Reed
- 5 years ago
- Views:
Transcription

1 2014 Edition

2 Revision 1.0, January 2014 MICRONIX USA, LLC The information within regarding the MICRONIX USA Product Line and/or any other products and technology owned by MICRONIX USA, LLC are subject to change without notice.
3 ABOUT US Founded in 2006, MICRONIX USA specializes in miniature microand nano-positioning components for the biomedical and research markets. In addition to our extensive standard product line, we provide rapid product development services ranging from customization of existing products to complete customized solutions. Our products are configurable for especially demanding application environments such as: Vacuum compatibility down to -9 mbar Cryogenic environments down to 4 Kelvin Radiation tolerant requirements Non-magnetic requirements We also provide system integration services for precision positioning applications of any size. Our team of experienced engineers is dedicated to help solve even the most demanding applications. We excel at assisting our customers in finding the best solution at a competitive price.

4 Piezo Motor Product Line PP NEW 1-3 PP PPS PPS PPS NEW 1-11 PPX PR NEW 1-15 PR Stepper Motor Product Line... VT-21S... VT-21L... PPS-20SM... PPS-28SM... VT-50L... ES PZS NEW MP MPA NEW Linear Motor Product Line PPS-20LM PPS-28LM Controller Product Line MMC MMD MMC-3... NEW 4-7 MMD-3... NEW 4-9 MMC MMC NEW 4-13 Advanced Capabilities Vacuum Capabilities Other Capabilities System Integration

5 AN INDUSTRY FIRST... ANY motor, SAME stage The following criteria are often of most concern among the multiple requirements that determine the selection of motion stages: Stage size Load capacity Resolution and repeatability Speed and acceleration Many of these criteria are primarily determined by the chosen drive technology. Most commonly, users have a choice among: Lead screw or ball screw driven by a stepper or DC motor Linear motor Piezo motor Each of these drive technologies has unique advantages and disadvantages, and is only suitable for specific application areas. However, many manufacturers try to fit square pegs into round holes by trying to sell the drive technology that is available in their designs rather than the optimal technology for a specific application. MICRONIX USA is now able to offer its original miniature piezo line with both lead screw drive as well as a linear motor option. The basic stage design remains the same, but users are able to choose the preferred drive technology that meets their specific requirements. 0-1
6 Piezo Nano-Positioning Primer Nano-positioning has become increasingly important in the motion control world due to ever shrinking dimensions in numerous applications. In recent years, long travel piezo driven stages have filled the technology void in nano-positioning with nanometer resolution and high position stability. Historically, piezos were mostly used for very short actuation ranges in the μm to sub-mm range, which required hybrid stages for long travel at nano-meter resolutions. Most recently, piezo motors have emerged that allow unlimited linear and rotary travel. Most of these piezo motors are based on the friction principle, which allows the limited range of the piezo itself (μm range) to be extended to unlimited travel ranges. Generally, a piezo element actuates a friction element that moves a second friction element (such as a stage carriage). Friction-based piezo motors can be roughly separated into resonant and non-resonant types. Resonant type piezo motors exhibit high speed but are not usable at very high resolutions below tens of nm. Non-resonant piezo motors operate below the resonant frequency of the piezo and are therefore audible in most cases. However, they allow highly stable nm and sub nm resolutions while at the same time creating unlimited travel. Some non-resonant piezo motors are based on a friction principle called the stick-slip principle, also sometimes referred to as inertial drive. This principle is explained in greater detail below. Stick-Slip (Inertial) Piezo Motor The basic principle of stick-slip inertial motion is the controlled use of friction in connection with the moving part s inertia. As shown in the drawing on the following page, an oscillating piezo element is connected to a friction element which moves the sliding friction element forward when the piezo extends due to an applied voltage. When the piezo is fully extended, which usually occurs after an extension of about 1 μm, a fast voltage transition 0-2
7 is applied that quickly contracts the piezo to its original position. The result is a fast backwards motion of the oscillating friction element. However, the inertia of the sliding friction element is too large to completely follow that backwards movement. Similar to a ratchet, this process is repeated until the sliding friction element, which is usually attached to the moving part of the stage, reaches its desired position. Stationary Part Piezo Element Oscillating Friction Element Friction Area Sliding Friction Element The main problem with conventional stick-slip piezo motors is that during the slip phase, the sliding friction element (moving part of the stage) follows the backwards movement to varying degrees. As a result, poor velocity regulation, induced vibration into the system and lost motion (slower velocity and lower efficiency) occur. The following chart shows actual measured results of a commercially available product (motion in μm on the vertical axis and time on the horizontal axis). As can be seen, there is very large backwards motion during every slip phase. The backwards motion amounts to about 50% of the forward motion per cycle. 0-3
8 Traditional Stick-Slip Piezo Motor Performance Position VS Time Position (µm) Weg über Zeit - Linear Maschine: Seriennummer: Datum: :41: Achse: Kommentar: File: Captured Data. Leserate: 000 Hz Max Wert: bei: Min Wert: bei: Time (seconds) MICRONIX Multi-Phase Piezo Motor Performance (Patented) Position VS Time Position (µm) Weg über Zeit - Linear Maschine: Seriennummer: Datum: :53: Achse: Kommentar: File: Captured Data. Leserate: 000 Hz Max Wert: bei: Min Wert: bei:.0018 Time (seconds) 0-4
9 The preceding chart shows the significant improvement achieved by using the MICRONIX Multi-Phase Stick-Slip piezo motor. This motor decreases or completely eliminates the backwards motion during the slip phase because it does not solely rely on the inertia of the moving part. Instead, the MICRONIX piezo motor utilizes at least two piezos and two friction elements that move in unison, but slip at different times. Using this method, the sliding friction elements slip at different times, so at least one element stays in the stick phase while the other one slips. As a result, the retract force and motion induced by the slip force onto the sliding element are reduced or completely eliminated. Stationary Part Piezo Elements Oscillating Friction Elements Sliding Friction Element Using the multi-phase principle results in significant performance improvements over single-phase motors, including: Higher moving forces Better velocity regulation smoother motion Less induced vibration More efficient motion All products listed in this brochure take advantage of our new Multi-Phase Piezo Motor and therefore exhibit the superior performance outlined above. 0-5
10 Piezo Motor P r o d u c t L i n e to scale 1-1
11 1-2
12 Piezo Positioner PP-12 Preliminary NEW The PP-12 is a low cost, ultra-compact linear piezo stage. Low profile and high load capacity are achieved through the use of a multi-phase piezo motor combined with a steel ball slide, which allows for smooth travel up to 4mm. The PP-12 can be directly X-Y mounted without the use of adapter plates. Vacuum versions are available. The PP-12 is compatible with the MMC-0 and MMC-1 controllers. K E Y F E A T U R E S Travel range of up to 4 mm 1 nm resolution Load capacity up to 0.5 kg Steel ball slide Low profile, 7 mm height Vacuum versions available T E C H N I C A L D A T A Travel range [mm] Straightness / Flatness [μm] Pitch [μrad] Yaw [μrad] Weight [g] Motor option Speed, max [mm/s] Encoder option Resolution, typical [nm] Repeatability, bi-directional [nm] Repeatability, uni-directional [nm] Accuracy [μm] Materials 4 ± 2 ± 150 ± Piezo Motor 2 (MMC-0), (MMC-1) None (open loop) Internal 1 50 n/a ± 200 n/a ± 2 aluminum body, steel bearing (other materials i.e. stainless steel, titanium, etc. available upon request) O R D E R I N G I N F O R M A T I O N PP D R I V E Piezo Motor, PM T R A V E L E N C O D E R L I M I T S W I T C H E N V I R O N M E N T 4 mm... 1 None... 0 Internal... 1 None... 0 Atmospheric... 0 High Vacuum, -6 mbar... 6 Ultra High Vacuum, -9 mbar
13 phone: +1 (949) fax: +1 (949) Load, max PM-002 F x [N] F y [N] F z [N] M x [N m] M y [N m] M z [N m] k αx [μrad/n m] k αy [μrad/n m] kαx Fz Mz Fx Mx kαy My Fy x 0.95 THRU M1.2x0.25-6H THRU * all dimensions are in millimeters x FARSIDE Specifications are subject to change without notice. 1-4
14 Piezo Positioner PP-20 The PP-20 is a low cost, compact linear piezo stage designed for open loop applications where nano-positioning for higher loads is required. Low profile and high load capacity are achieved through the use of a multi-phase piezo motor combined with a steel ball slide, which allows for smooth travel up to 12 mm. Vacuum and Ultra High Vacuum (-9 mbar) versions are available. The PP-20 is compatible with the MMC-0 and MMC-1 controllers. K E Y F E A T U R E S Travel range of up to 12 mm 1 nm resolution Load capacity up to 1 kg Steel ball slide Low profile, 7 mm height Vacuum versions available T E C H N I C A L D A T A Travel range [mm] Straightness / Flatness [μm] Pitch [μrad] Yaw [μrad] Weight [g] Motor option Speed, max [mm/s] Encoder option Resolution, typical [nm] Repeatability, bi-directional [nm] Repeatability, uni-directional [nm] Accuracy [μm] Materials 12 ± 2 ± 150 ± Piezo Motor 2 (MMC-0), (MMC-1) None (open loop) 1 n/a n/a - aluminum body, steel bearing (other materials i.e. stainless steel, titanium, etc. available upon request) O R D E R I N G I N F O R M A T I O N PP D R I V E Piezo Motor, PM T R A V E L 12 mm... 1 E N C O D E R L I M I T S W I T C H E N V I R O N M E N T None... 0 None... 0 Atmospheric... 0 High Vacuum, -6 mbar... 6 Ultra High Vacuum, -9 mbar
![www.micronixusa.com info@micronixusa.com phone: +1 (949) 480 0538 fax: +1 (949) 480 0538 Load, max PM-002 F x [N] F y [N] F z [N] M x [N m] M y [N m] M z [N m] k αx [μrad/n m] k αy [μrad/n m] 2 0.6 0.](/docs-images/90/102245939/images/15-1.jpg "4 0.5 - - kαx Fz Mz Fx Mx kαy My Fy 14 3 2 x M2x0.4 1.2 23 1.5 18 2 x Ø 2.2 THRU Ø 4.2 3.3 14 23 20 14 R 2.1 7 8 2 x R 1.1 4 x Ø 1.")
15 phone: +1 (949) fax: +1 (949) Load, max PM-002 F x [N] F y [N] F z [N] M x [N m] M y [N m] M z [N m] k αx [μrad/n m] k αy [μrad/n m] kαx Fz Mz Fx Mx kαy My Fy x M2x x Ø 2.2 THRU Ø R x R x Ø * all dimensions are in millimeters Specifications are subject to change without notice. 1-6
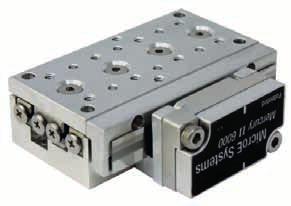
16 Precision Piezo Stage PPS-20 The PPS-20 is a high-precision, long travel linear piezo stage. Miniature crossed roller bearings assure high stiffness and guiding accuracy for loads up to 20 N (horizontal orientation). It utilizes our patent-pending multi-phase piezo motor resulting in high speed (> 2 mm/s) and high blocking force (> 2 N). The PPS-20 is available in open loop or with an external encoder. Closed loop resolution of 2 nm is achievable. Versions capable of operation in vacuum (-9 mbar) and/or cryo (4 Kelvin) are available. The PPS-20 is compatible with the MMC-0 and MMC-1 controllers. K E Y F E A T U R E S Travel range of up to 51 mm 2 nm closed loop resolution Load capacity up to 2 kg Steel crossed roller bearing Low profile, 13 mm height ( mm without carriage) Vacuum, cryo, and non-magnetic versions available T E C H N I C A L D A T A Travel range [mm] Straightness / Flatness [μm] 12 ± 1 18 ± ± ± 2.5 Pitch [μrad] ± 60 ± 80 ± 80 ± 0 Yaw [μrad] ± 70 ± 90 ± 90 ± 0 Weight [g] Motor option Piezo Motor Speed, max [mm/s] Encoder option None (open loop) 2 (MMC-0), (MMC-1) Analog (1 V pp ) Digital (RS-422) Resolution, typical [nm] 1 2 Repeatability, bi-directional [nm] n/a ± 50 ± 20 Repeatability, uni-directional [nm] n/a Accuracy [μm] - ± 1 ± 1 Materials aluminum body, steel bearing (other materials i.e. stainless steel, titanium, etc. available upon request) O R D E R I N G I N F O R M A T I O N D R I V E T R A V E L Piezo Motor, PM mm mm mm mm... 5 PPS E N C O D E R L I M I T S W I T C H E N V I R O N M E N T None... 0 Analog (1 V pp )... 2 Digital (RS-422)... 3 None... 0 Atmospheric... 0 High Vacuum, -6 mbar... 6 Ultra High Vacuum, -9 mbar
17 phone: +1 (949) fax: +1 (949) Load, max PM-002 F x [N] F y [N] F z [N] M x [N m] M y [N m] M z [N m] k αx [μrad/n m] k αy [μrad/n m] kαx Fz Mz Fx Mx kαy My Fy 6 x M2x x Ø 2.2 THRU Ø FARSIDE A-5 2 x Ø A+1.6 A 2 x M2x x Ø x Ø 2.2 THRU Ø FARSIDE Travel A B * 12 mm travel version shown * all dimensions are in millimeters Specifications are subject to change without notice. 1-8
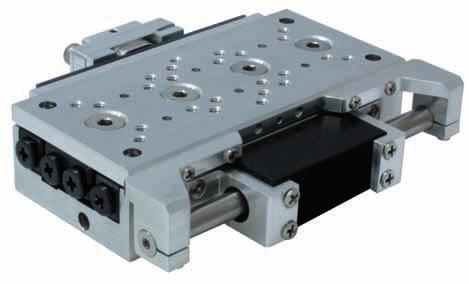
18 Precision Piezo Stage PPS-28 The PPS-28 is a high-precision, long travel linear piezo stage. Miniature crossed roller bearings assure high stiffness and guiding accuracy for loads up to 50 N (horizontal orientation). It utilizes our patent-pending multi-phase piezo motor resulting in high speed (> 2 mm/s) and high blocking force (> 2 N). The PPS-28 is available in open loop or with an external encoder. Closed-loop resolution of 2 nm is achievable. Versions capable of operation in vacuum (-9 mbar) and/or cryo (4 Kelvin) are available. The PPS-28 is compatible with the MMC-0 and MMC-1 controllers. K E Y F E A T U R E S Travel range of up to 2 mm 2 nm closed loop resolution Load capacity up to 5 kg Steel crossed roller bearing Low profile, 15 mm height (12 mm without carriage) Vacuum, cryo, and non-magnetic versions available T E C H N I C A L D A T A Travel range [mm] Straightness / Flatness [μm] 26 ± ± ± 3 2 ± 3.5 Pitch [μrad] ± 50 ± 70 ± 80 ± 0 Yaw [μrad] ± 60 ± 75 ± 90 ± 0 Weight [g] Motor option Piezo Motor Speed, max [mm/s] Encoder option None (open loop) 2 (MMC-0), (MMC-1) Analog (1 V pp ) Digital (RS-422) Resolution, typical [nm] 1 2 Repeatability, bi-directional [nm] n/a ± 50 ± 20 Repeatability, uni-directional [nm] n/a Accuracy [μm] - ± 1 ± 1 Materials aluminum body, steel bearing (other materials i.e. stainless steel, titanium, etc. available upon request) O R D E R I N G I N F O R M A T I O N D R I V E T R A V E L E N C O D E R L I M I T S W I T C H Piezo Motor, PM mm mm mm mm... 5 None... 0 Analog (1 V pp )... 2 Digital (RS-422)... 3 None... 0 PPS E N V I R O N M E N T Atmospheric... 0 High Vacuum, -6 mbar... 6 Ultra High Vacuum, -9 mbar
19 phone: +1 (949) fax: +1 (949) Load, max PM-002 F x [N] F y [N] F z [N] M x [N m] M y [N m] M z [N m] k αx [μrad/n m] k αy [μrad/n m] kαx Fz Mz Fx Mx kαy My Fy 8 x M2x x Ø x Ø 2.7 Ø FARSIDE 15 A-8 A+4 A 28 2 x Ø 3.2 Ø FARSIDE 4 x Ø B Travel A B * 26 mm travel version shown * all dimensions are in millimeters Specifications are subject to change without notice. 1-
20 Precision Positioning Stage PPS-60 The PPS-60 is high-precision, long travel linear stage. It is available with piezo motor, linear motor or stepper motor drive. Ball bearings assure high stiffness and guiding accuracy for loads up to 150 N. The PPS-60 is available with an optional linear encoder for increased resolution and repeatability. PPS-60 stages can be mounted in XY without any adapter, and a Z-axis can be added with the use of a standard mounting bracket. K E Y F E A T U R E S Travel ranges of up to 300 mm (longer travel available on request) 1.2 nm closed loop resolution Load capacity up to 15 kg Steel ball bearing Integrated mechanical limit switches Vacuum, non-magnetic & cryo versions available T E C H N I C A L D A T A Travel range [mm] Straightness / Flatness [μm] ± 2.5 ± 4 ± 6 ± 8 ± Pitch [μrad] ± 50 ± 75 ± 0 ± 125 ± 150 Yaw [μrad] ± 50 ± 75 ± 0 ± 125 ± 150 Motor option Piezo Motor Stepper Motor Linear Motor Speed, max [mm/s] (MMC-1) (*15) 0 Encoder option D R I V E T R A V E L E N C O D E R L I M I T S W I T C H E N V I R O N M E N T Open Analog Digital Loop (1 V pp ) (RS-422) Digital Low Cost Open Analog Loop (1 V pp ) PPS-60- Digital (RS-422) Digital Low Cost Analog (1 V pp ) NEW Digital (RS-422) Resolution, typical [μm] Repeatability, bi-directional [μm] - ±0.05 ±0.02 ±1 ±4 ±0.1 ±0.1 ±1 ±0.05 ±0.02 ±1 Repeatability, uni-directional [μm] Accuracy [μm] - ±1 ±1 ±3 ± ±1 ±1 ±3 ±1 ±1 ±3 aluminum body, steel bearing Materials (other materials i.e. stainless steel, titanium, etc. available upon request) *with external stepper motor O R D E R I N G I N F O R M A T I O N Piezo Motor, PM Internal Stepper Motor, SM Linear Motor, LM External Stepper Motor, SM mm mm mm mm mm... 5 None... 0 Analog (1 V pp )... 2 Digital (RS-422)... 3 Digital low cost, 0.5 μm... 4 None... 0 Mechanical... 1 Optical... 2 Atmospheric... 0 High Vacuum, -6 mbar... 6 Ultra High Vacuum, -9 mbar... 9 only available with Piezo Motor option or externally mounted UHV stepper Motor Digital Low Cost 1-11
21 phone: +1 (949) fax: +1 (949) Load, max PM-003 SM-001 LM-002 F x [N] F y [N] F z [N] M x [N m] M y [N m] M z [N m] k αx [μrad/n m] k αy [μrad/n m] SM kαx Fz Mz Fx Mx kαy My Fy Travel L A B C *50 mm travel version shown * all dimensions are in millimeters External Stepper motor for 0mm and above travel 6x M x M x x M x 2 3 L L+55.6 A 45 B C 4 x 2.95 THRU FARSIDE 25 8 x 3.3 THRU FARSIDE M4x Specifications are subject to change without notice. 1-12
22 Piezo Cross Stage PPX-32 The PPX-32 is a low profile, long travel, integrated XY stage with a height of only 14 mm. Four pre-loaded ball slides guarantee smooth and stable motion for loads up to N. It utilizes a multi-phase piezo motor resulting in high speed (> 2 mm/s) and high blocking force (> 2 N). The PPX-32 is available in open loop or with a linear glass scale encoder. Closed-loop resolution of nm is achievable. Versions capable of operation in vacuum (-9 mbar) are available. The PPX-32 is compatible with the MMC-0 and MMC-1 controllers. K E Y F E A T U R E S Travel range of 18 x 18 mm nm closed loop resolution Load capacity up to 1 kg Steel ball slides Low profile, 14 mm height Vacuum versions available T E C H N I C A L D A T A Travel range [mm] Straightness / Flatness [μm] Pitch [μrad] Yaw [μrad] Weight [g] Motor option Speed, max [mm/s] Encoder option Resolution, typical [nm] Repeatability, bi-directional [nm] Repeatability, uni-directional [nm] Accuracy [μm] Materials 18 x 18 ± 2.5 ± 200 ± 0 40 Piezo Motor 2 (MMC-0), (MMC-1) None (open loop) Analog (1 V pp ) 1 n/a ± 50 n/a 50 - ± 1 aluminum body, steel bearing (other materials i.e. stainless steel, titanium, etc. available upon request) O R D E R I N G I N F O R M A T I O N PPX D R I V E Piezo Motor, PM T R A V E L 18 x 18 mm... 1 E N C O D E R None... 0 Analog (1 V pp )... 2 L I M I T S W I T C H None... 0 E N V I R O N M E N T Atmospheric... 0 High Vacuum, -6 mbar... 6 Ultra High Vacuum, -9 mbar
23 phone: +1 (949) fax: +1 (949) Load, max PM-002 F x [N] F y [N] F z [N] M x [N m] M y [N m] M z [N m] k αx [μrad/n m] k αy [μrad/n m] kαx Fz Mz Fx Mx kαy My Fy 2 x Ø 2.2 THRU Ø FARSIDE * 4 x M2x x Ø x M2x x Ø 2.2 THRU Ø FARSIDE 16 4 x M2x * x M2x x Ø * grey parts for closed loop version only * all dimensions are in millimeters Specifications are subject to change without notice. 1-14
24 Piezo Rotation Stage PR-20 Preliminary NEW The PR-20 is a low cost, ultra-compact rotational piezo stage. Low profile and high load capacity are achieved through the use of a multi-phase piezo motor combined with dual ceramic, mutually pre-loaded ball bearings, which allows for smooth, 360º travel. Vacuum versions are available. The PR-20 is compatible with the MMC-0 and MMC-1 controllers. K E Y F E A T U R E S Continuous 360º motion Load capacity up to 0.5 kg Dual ceramic, mutually pre-loaded ball bearings Low profile, 12 mm height Vacuum versions available T E C H N I C A L D A T A Travel range [º] Flatness (bearings) [μm] Eccentricity (bearings) [μm] Wobble [μrad] Weight [g] Motor option Speed, max [mm/s] Encoder option Resolution, typical [μº] Repeatability, bi-directional [μº] Repeatability, uni-directional [μº] Accuracy [μº] Materials 360º, limitless ± 5 ± 5 ± Piezo Motor 2 (MMC-0), (MMC-1) None (open loop) 500 n/a n/a - Internal 500 ± ± aluminum body, steel bearing (other materials i.e. stainless steel, titanium, etc. available upon request) O R D E R I N G I N F O R M A T I O N PR D R I V E Piezo Motor, PM T R A V E L E N C O D E R L I M I T S W I T C H E N V I R O N M E N T 360º, continuous... 1 None... 0 None... 0 Atmospheric... 0 High Vacuum, -6 mbar... 6 Ultra High Vacuum, -9 mbar... 9 Non-Magnetic... N 1-15
25 phone: +1 (949) fax: +1 (949) Load, max PM-002 F r [N] F z [N] M r [N m] M z [N m] k αr [μrad/n m] Fz M z kαr Mr Fr 6x M1.2x0.25-6H x 2.20 THRU C L * all dimensions are in millimeters Specifications are subject to change without notice. 1-16
26 Piezo Rotation Stage PR-32 The PR-32 is a compact rotation stage with unlimited travel. Two pre-loaded steel ball bearings ensure smooth motion and high stability. It utilizes our patent-pending multi-phase piezo motor resulting in high speed (> 6 º/s) and high blocking force. The PR-32 can be combined with the linear PPX-32 or with the PPS-series stages. Versions capable of operation in vacuum (-9 mbar) are available. The PR-32 is compatible with the MMC-0 and MMC-1 controllers. K E Y F E A T U R E S Continuous 360º motion Load capacity up to 1 kg Steel ball bearings Vacuum versions available T E C H N I C A L D A T A Travel range [º] Flatness (bearings) [μm] Eccentricity (bearings) [μm] Wobble [μrad] Weight [g] Motor option Speed, max [º/s] Encoder option Resolution, typical [μº] Repeatability, bi-directional [μº] Repeatability, uni-directional [μº] Accuracy [μº] Materials 360, Continuous ± 5 ± 5 ± 0 50 Piezo Motor 6 (MMC-0), 30 (MMC-1) None (open loop) Analog (1 V pp ) n/a ± 220 n/a aluminum body, steel bearing (other materials i.e. stainless steel, titanium, etc. available upon request) O R D E R I N G I N F O R M A T I O N PR D R I V E T R A V E L E N C O D E R L I M I T S W I T C H E N V I R O N M E N T Piezo Motor, PM-002R º, Continuous... 1 None... 0 Analog (1 V pp )... 2 None... 0 Atmospheric... 0 High Vacuum, -6 mbar... 6 Ultra High Vacuum, -9 mbar
27 phone: +1 (949) fax: +1 (949) Load, max PM-002R F r [N] F z [N] M r [N m] M z [N m] k αr [μrad/n m] Fz M z kαr Mr Fr 30.4* x x M2 4 4x x M "-40 THREADED APERATURE 4x * without carriage 60 * grey parts for closed loop version only * all dimensions are in millimeters Specifications are subject to change without notice. 1-18

28 Stepper Motor P r o d u c t L i n e 2-1
29 2-2 to scale
30 Translation Stage VT-21S The low cost VT-21S linear stage excels in applications with very limited space due to its compact design. The stage utilizes a 2-phase stepper motor and is equipped with two mechanical limit switches. A pre-loaded ball slide creates high stiffness and superior performance. The VT-21S is available with an optional linear encoder with 50 nm resolution. The stages can be mounted in XY or XYZ configuration in a space-saving arrangement. Versions capable of operation in vacuum (-6 mbar) are available. The VT-21S is compatible with the MMC-200 controller. K E Y F E A T U R E S Travel range of mm 50 nm closed loop resolution Load capacity up to 1 kg Steel ball slide Integrated mechanical limit switches Vacuum versions available T E C H N I C A L D A T A Travel range [mm] Straightness / Flatness [μm] Pitch [μrad] Yaw [μrad] Weight [g] Motor option Speed, max [mm/s] Encoder option None (open loop) Resolution, typical [μm] 0.5 Repeatability, bi-directional [μm] Repeatability, uni-directional [μm] Accuracy [μm] Materials O R D E R I N G I N F O R M A T I O N D R I V E T R A V E L E N C O D E R ± ± ± 2.5 ± 150 ± Phase Stepper Motor 5 Analog (1 V pp ) 0.05 ± ± 1 Digital (RS-422) 0.05 ± ± 1 aluminum body, steel bearing (other materials i.e. stainless steel, titanium, etc. available upon request) VT-21- Stepper Motor, SM mm... 1 None... 0 Analog (1 V pp )... 2 Digital (RS-422) L I M I T S W I T C H E N V I R O N M E N T Mechanical... 1 Atmospheric... 0 High Vacuum, -6 mbar
31 phone: +1 (949) fax: +1 (949) Load, max SM-001 F x [N] F y [N] F z [N] M x [N m] M y [N m] M z [N m] k αx [μrad/n m] k αy [μrad/n m] kαx Fz Mz Fx Mx kαy My Fy x M2.5x x Ø * M4x x Ø 2.7 THRU Ø * grey parts for closed loop version only * all dimensions are in millimeters * 2 x Ø Specifications are subject to change without notice. 2-4
32 Translation Stage VT-21L The low cost VT-21L linear stage excels in applications with very limited space due to its compact design. The stage utilizes a 2-phase stepper motor and is equipped with two mechanical limit switches. A pre-loaded ball slide creates high stiffness and superior performance. The VT-21L is available with an optional linear encoder with 50 nm resolution. The stages can be mounted in XY or XYZ configuration in a space-saving arrangement. Versions capable of operation in vacuum (-6 mbar) are available. The VT-21L is compatible with the MMC-200 controller. K E Y F E A T U R E S Travel range of 26 mm 50 nm closed loop resolution Load capacity up to 1 kg Steel ball slide Integrated mechanical limit switches Vacuum versions available T E C H N I C A L D A T A Travel range [mm] Straightness / Flatness [μm] Pitch [μrad] Yaw [μrad] Weight [g] Motor option Speed, max [mm/s] Encoder option None (open loop) Resolution, typical [μm] 0.5 Repeatability, bi-directional [μm] ± 4 Repeatability, uni-directional [μm] 0.5 Accuracy [μm] ± Materials O R D E R I N G I N F O R M A T I O N D R I V E T R A V E L E N C O D E R 26 ± 3 ± 180 ± Phase Stepper Motor 5 Analog (1 V pp ) 0.05 ± ± 1 Digital (RS-422) 0.05 ± ± 1 aluminum body, steel bearing (other materials i.e. stainless steel, titanium, etc. available upon request) VT-21- Stepper Motor, SM mm... 2 None... 0 Analog (1 V pp )... 2 Digital (RS-422) L I M I T S W I T C H E N V I R O N M E N T Mechanical... 1 Atmospheric... 0 High Vacuum, -6 mbar
![www.micronixusa.com info@micronixusa.com phone: +1 (949) 480 0538 fax: +1 (949) 480 0538 Load, max SM-001 F x [N] F y [N] F z [N] M x [N m] M y [N m] M z [N m] k αx [μrad/n m] k αy [μrad/n m] 0.4 0.](/docs-images/90/102245939/images/33-0.jpg "6 0.5 - - kαx Fz Mz Fx Mx kαy My Fy 4.5 75 60 39 13 3 x Ø 2.9 THRU Ø 5.5 1.3 5.8 35.2* 13 22 8 x M2.5x0.45 4 4 x Ø 1.5 3 20.6 15.5 11 5.8 13 17.5 23.5 57.5 7.5 113.2 99* 3 x Ø 1.5 3.5 Ø 2.9 THRU Ø 5.5 8.")
33 phone: +1 (949) fax: +1 (949) Load, max SM-001 F x [N] F y [N] F z [N] M x [N m] M y [N m] M z [N m] k αx [μrad/n m] k αy [μrad/n m] kαx Fz Mz Fx Mx kαy My Fy x Ø 2.9 THRU Ø * x M2.5x x Ø * 3 x Ø Ø 2.9 THRU Ø FARSIDE * grey parts for closed loop version only * all dimensions are in millimeters Specifications are subject to change without notice. 2-6
34 Precision Positioning Stage PPS-20SM The PPS-20 Stepper Motor version is suitable for applications requiring high speed and high blocking force. Miniature crossed roller bearings assure high stiffness and guiding accuracy for loads up to 20 N (horizontal orientation). It utilizes a 2-phase stepper motor resulting in high speed (> 4 mm/s) and high blocking force (> N). The PPS-20SM is available in open loop or with an external encoder. Resolutions of 0 nm are achievable. Versions capable of operation in vacuum (-6 mbar) are available. The PPS-20SM is compatible with the MMC-200 controller. K E Y F E A T U R E S Travel range of up to 51 mm 0 nm resolution Load capacity up to 20N Steel crossed roller bearing Low profile, 13 mm height Vacuum versions available T E C H N I C A L D A T A Travel range [mm] Straightness / Flatness [μm] ± 1 ± 1.5 ± 1.5 ± 2.5 Pitch [μrad] ± 60 ± 80 ± 80 ± 0 Yaw [μrad] ± 70 ± 90 ± 90 ± 0 Weight [g] Motor option 2-Phase Stepper Motor Speed, max [mm/s] 4 Encoder option None (open loop) Analog (1 V pp ) Digital (RS-422) Resolution, typical [μm] Repeatability, bi-directional [μm] Repeatability, uni-directional [μm] Accuracy [μm] Materials O R D E R I N G I N F O R M A T I O N D R I V E T R A V E L E N C O D E R L I M I T S W I T C H ± ± 0.2 ± ± ± 1 ± 1 aluminum body, steel bearing, stainless steel bracket, brass nut (other materials i.e. stainless steel, titanium, etc. available upon request) PPS-20-2 Stepper Motor, SM mm mm mm mm... 5 None... 0 Analog (1 V pp )... 2 Digital (RS-422)... 3 None... 0 Magnetic... 1 Optical... 2 E N V I R O N M E N T Atmospheric... 0 High Vacuum, -6 mbar... 6 only available with Digital Encoder option 2-7

![com phone: +1 (949) 480 phone: 0538 +1 fax: (949) +1 (949) 480 0538 480 0538 fax: +1 (949) 480 0538 oad, max M-002 Load, max F x [N] F y [N] F x F z [N] [N] FM y x [N] [N m] MF z y [N] [N m] M x z [N](/docs-images/90/102245939/images/35-1.jpg "m] Mk y αx [N m] [μrad/n m] M z [N m] k αy [μrad/n m] k αx [μrad/n m] k αy [μrad/n m] SM-002 20 20 20.7 20.7 0.7 0.7 0.7-0.7 - - - Fz Mz Fz Mz kαy kαx kαy kαx Fy My Mx Fx Fy My Mx Fx Ø 4 4.4 x Ø 2.")
35 phone: +1 (949) 480 phone: fax: (949) +1 (949) fax: +1 (949) oad, max M-002 Load, max F x [N] F y [N] F x F z [N] [N] FM y x [N] [N m] MF z y [N] [N m] M x z [N m] Mk y αx [N m] [μrad/n m] M z [N m] k αy [μrad/n m] k αx [μrad/n m] k αy [μrad/n m] SM Fz Mz Fz Mz kαy kαx kαy kαx Fy My Mx Fx Fy My Mx Fx Ø x Ø FARSIDE 2 x Ø x M2x0.4 3 Ø x Ø FARSIDE A x Ø x M2x0.4 3 A C D A C D A x Ø2.2 2 x Ø2.2 Ø FARSIDE Ø FARSIDE 4 x Ø x 14 Ø B B Travel A B Travel C AD B C Specifications are subject to change without notice D * 12 mm travel version * 12 shown mm travel version shown * all dimensions are * in all millimeters dimensions are in millimeters Specifications are subject to change without notice. 2-8
36 Precision Positioning Stage PPS-28SM The PPS-28 Stepper Motor version is suitable for applications requiring high speed and high blocking force. Miniature crossed roller bearings assure high stiffness and guiding accuracy for loads up to 50 N (horizontal orientation). It utilizes a 2-phase stepper motor resulting in high speed (> 4 mm/s) and high blocking force (> N). The PPS-28SM is available in open loop or with an external encoder. Resolutions of 0 nm are achievable. Versions capable of operation in vacuum (-9 mbar) are available. The PPS-28SM is compatible with the MMC-200 controller. K E Y F E A T U R E S Travel range of up to 2 mm 0 nm resolution Load capacity up to 5 kg Steel crossed roller bearing Low profile, 15 mm height Vacuum versions available T E C H N I C A L D A T A Travel range [mm] Straightness / Flatness [μm] ± 1.5 ± 2.5 ± 3 ± 3.5 Pitch [μrad] ± 50 ± 70 ± 80 ± 0 Yaw [μrad] ± 60 ± 75 ± 90 ± 0 Weight [g] Motor option 2-Phase Stepper Motor Speed, max [mm/s] 4 Encoder option None (open loop) Analog (1 V pp ) Digital (RS-422) Resolution, typical [μm] Repeatability, bi-directional [μm] Repeatability, uni-directional [μm] Accuracy [μm] Materials O R D E R I N G I N F O R M A T I O N D R I V E T R A V E L E N C O D E R L I M I T S W I T C H E N V I R O N M E N T ± ± 0.2 ± ± ± 1 ± 1 aluminum body, steel bearing, stainless steel bracket, brass nut (other materials i.e. stainless steel, titanium, etc. available upon request) PPS-28-2 Stepper Motor, SM mm mm mm mm... 5 None... 0 Analog (1 V pp )... 2 Digital (RS-422)... 3 None... 0 Magnetic... 1 Optical...2 Atmospheric... 0 High Vacuum, -6 mbar... 6 only available with Digital Encoder option 2-9
37 phone: +1 (949) 480 phone: fax: (949) +1 (949) fax: +1 (949) oad, max M-002 Load, max F x [N] F y [N] F x F z [N] [N] FM y x [N] [N m] MF z y [N] [N m] M x z [N m] Mk y αx [N m] [μrad/n m] M z [N m] k αy [μrad/n m] k αx [μrad/n m] k αy [μrad/n m] SM Fz Mz kαy Fz Mz kαx kαy kαx Fy My Mx Fx Fy My Mx Fx 8 x M2x x M2x0.4 A A x Ø x Ø x Ø 2.7 Ø FARSIDE 4 x Ø 2.7 Ø FARSIDE C 2 x Ø3.2 Ø FARSIDE D AC 2 x Ø3.2 Ø FARSIDE 14 B D A x Ø B Travel A B Travel C * 26 mm travel version shown AD B Specifications are subject to change without notice. C D * all dimensions are in millimeters * 26 mm travel version shown * all dimensions are in millimeters 4 x Ø Specifications are subject to change without notice. 2-
38 Translation Stage VT-50L The low cost VT-50 linear stage excels in applications with very limited space due to its compact design. The stage utilizes a 2-phase stepper motor and is equipped with two mechanical limit switches. A pre-loaded ball bearing (optional cross-roller bearing) creates high stiffness and superior performance. The VT-50 is available with an optional linear encoder with 50 nm resolution. VT-50 stages can be mounted XY without any adapters, and a Z-axis can be added with the use of a standard mounting bracket. For elevation travel ranges of mm or less the VT-50 can be combined with the ES-50 elevation stage without the use of adapter plates.versions capable of operation in vacuum (-6 mbar) are available. The VT-50 is compatible with the MMC-200 controller. K E Y F E A T U R E S Travel range of 50 to 300 mm (longer travel available on request up to 500 mm) 50 nm closed loop resolution Load capacity up to 20 kg Steel ball bearing Integrated mechanical limit switches Vacuum versions available T E C H N I C A L D A T A Travel range [mm] Straightness / Flatness [μm] ± 5 ± 7 ± ± 12 Pitch [μrad] ± 0 ± 125 ± 150 ± 200 Yaw [μrad] ± 0 ± 125 ± 150 ± 200 Weight [g] Motor option 2-Phase Stepper Motor Speed, max [mm/s] Encoder option None (open loop) Analog (1 V pp ) Digital (RS-422) Resolution, typical [μm] Repeatability, bi-directional [μm] ± ± 0.2 ± 0.2 Repeatability, uni-directional [μm] Accuracy [μm] ± 20 ± 3 ± 3 Materials O R D E R I N G I N F O R M A T I O N D R I V E T R A V E L E N C O D E R L I M I T S W I T C H aluminum body, steel bearing (other materials i.e. stainless steel, titanium, etc. available upon request) Stepper Motor, SM mm mm mm mm... 4 None... 0 Analog (1 V pp )... 2 Digital (RS-422)... 3 Mechanical... 1 VT-50L- 1 1 E N V I R O N M E N T Atmospheric... 0 High Vacuum, -6 mbar
 480 0538 fax: +1 (949) 480 0538 Load, max F x [N] F y [N] F z [N] M x [N m] M y [N m] M z [N m] k αx [μrad/n m] k αy [μrad/n m] SM-003 50 200 200 0 0 kαx Fz Mz Fx Mx kαy My Fy 55")
39 phone: +1 (949) fax: +1 (949) Load, max F x [N] F y [N] F z [N] M x [N m] M y [N m] M z [N m] k αx [μrad/n m] k αy [μrad/n m] SM kαx Fz Mz Fx Mx kαy My Fy Travel x M2.5x0.45 A B C D B C 4x M3x0.5 2x x 3.2 THRU FARSIDE 32 A 46.2 Specifications are subject to change without notice. 8.5 D
40 Elevation Stage ES-50 The ES-50 elevation stage is designed for applications with limited space conditions. The ES-50 stage is driven by a 2-phase stepper motor and is equipped with two mechanical limit switches. Two pre-loaded ball slides assure smooth motion and high stiffness. The ES-50 allows for a highly rigid XZ or XYZ setup without the need for adapter brackets when combined with the VT-50 series of linear stages. Versions capable of operation in vacuum (-6 mbar) are available. The ES-50 is compatible with the MMC-200 controller. K E Y F E A T U R E S Travel range of mm 50 nm closed loop resolution Load capacity up to 2 kg Steel ball slides Integrated mechanical limit switches Vacuum versions available T E C H N I C A L D A T A Travel range [mm] Straightness / Flatness [μm] Pitch [μrad] Yaw [μrad] Weight [g] Motor option Speed, max [mm/s] Encoder option None (open loop) Resolution, typical [μm] 0.5 Repeatability, bi-directional [μm] Repeatability, uni-directional [μm] Accuracy [μm] Materials O R D E R I N G I N F O R M A T I O N D R I V E T R A V E L E N C O D E R ± ± 4 ± 300 ± Phase Stepper Motor 5 Analog (1 V pp ) 0.05 ± ± 1 Digital (RS-422) 0.05 ± ± 1 aluminum body, steel bearing (other materials i.e. stainless steel, titanium, etc. available upon request) ES-50- Stepper Motor, SM mm... 1 None... 0 Analog (1 V pp )... 2 Digital (RS-422) L I M I T S W I T C H E N V I R O N M E N T Mechanical... 1 Atmospheric... 0 High Vacuum, -6 mbar
 480 0538 fax: +1 (949) 480 0538 Load, max SM-001 F x [N] F y [N] F z [N] M x [N m] M y [N m] M z [N m] k αx [μrad/n m] k αy [μrad/n m] 5 5 1 1 1 - - kαx Fz Mz Fx Mx kαy My Fy 4 x")
41 phone: +1 (949) fax: +1 (949) Load, max SM-001 F x [N] F y [N] F z [N] M x [N m] M y [N m] M z [N m] k αx [μrad/n m] k αy [μrad/n m] kαx Fz Mz Fx Mx kαy My Fy 4 x M3x x M2.5x x Ø * 40 4 x Ø 3.2 THRU Ø FARSIDE 2 x Ø * gray parts for closed loop versions only * all dimensions are in millimeters Specifications are subject to change without notice. 2-14
42 Elevation Stage PZS-90 NEW The PZS-90 elevation stage is designed for applications with limited space conditions. allows for a highly rigid XZ or XYZ setup without the need for adapter brackets when combined with the VT-50L series & PPS-60 series of linear stages. The PZS-90 stage is driven by a 2-phase stepper motor and is equipped with two mechanical limit switches. An optional linear encoder provides higher accuracy versus the open loop option. Versions capable of operation in vacuum (-6 mbar) are available. The PZS-90 is compatible with the MMC-200 controller. K E Y F E A T U R E S Travel range of 35 mm 0 nm closed loop resolution Load capacity up to 15 kg Steel cross roller bearing Integrated mechanical limit switches Vacuum versions available T E C H N I C A L D A T A Travel range [mm] Straightness / Flatness [μm] Pitch [μrad] Yaw [μrad] Weight [kg] Motor option Speed, max [mm/s] Encoder option Resolution, typical [μm] Repeatability, bi-directional [μm] Repeatability, uni-directional [μm] Accuracy [μm] Materials None (open loop) 0.5 ± ± ± 3 ± 200 ± Phase Stepper Motor Analog (1 V pp ) Digital (RS-422) 0.1 ± ± ± ± 1 Digital Low Cost (RS-422) 0.5 ± 1 1 ±3 aluminum body, steel bearing (other materials i.e. stainless steel, titanium, etc. available upon request) O R D E R I N G I N F O R M A T I O N D R I V E T R A V E L E N C O D E R PZS-90- Stepper Motor, SM mm... 1 None... 0 Analog (1 V pp )... 2 Digital (RS-422)... 3 Digital low cost, 0.5μm L I M I T S W I T C H E N V I R O N M E N T Mechanical... 1 Atmospheric... 0 High Vacuum, mbar
43 phone: +1 (949) fax: +1 (949) Load, max SM-003 F x [N] F y [N] F z [N] M x [N m] M y [N m] M z [N m] k αx [μrad/n m] k αy [μrad/n m] kαx Fz Mz Fx x THRU ALL M2.5x0.45-6H THRU ALL 4 x THRU ALL M3x0.5-6H THRU ALL 2 x M2x0.4-6H kαy Mx My Fy 2 x x x 8 THRU ALL 12 6 FARSIDE 2-16
44 Micro Pusher MP-21 The MP-21 linear actuator is designed for applications with very limited space conditions. Typical applications include actuation of manual drive stages and mirror mounts. It utilizes a 2-phase stepper motor and a mechanical limit switch for homing. Versions capable of operation in vacuum (-6 mbar) are available. The MP-21 is compatible with the MMC-200 controller. K E Y F E A T U R E S Travel range of 12 and 25 mm 0.1 μm resolution Maximum force of 40 N Ball spline with low backlash, non-rotating tip Integrated mechanical limit switch Vacuum versions available T E C H N I C A L D A T A Travel range [mm] Straightness / Flatness [μm] Pitch [μrad] Yaw [μrad] Weight [g] Motor option Speed, max [mm/s] Encoder option Resolution, typical [μm] Repeatability, bi-directional [μm] Repeatability, uni-directional [μm] Accuracy [μm] Materials Phase Stepper Motor 5 None (open loop) 0.1 ± aluminum body, stainless steel ball spline (other materials i.e. stainless steel, titanium, etc. available upon request) O R D E R I N G I N F O R M A T I O N MP D R I V E T R A V E L E N C O D E R L I M I T S W I T C H E N V I R O N M E N T Stepper Motor, SM mm mm... 2 None... 0 Mechanical... 1 Atmospheric... 0 High Vacuum, -6 mbar
 480 0538 fax: +1 (949) 480 0538 Load, max SM-001 F x [N] F y [N] F z [N] M x [N m] M y [N m] M z [N m] k αx [μrad/n m] k αy [μrad/n m] 40 0 0 - - - - - kαy Fz Mz kαx Fy My Mx Fx")
45 phone: +1 (949) fax: +1 (949) Load, max SM-001 F x [N] F y [N] F z [N] M x [N m] M y [N m] M z [N m] k αx [μrad/n m] k αy [μrad/n m] kαy Fz Mz kαx Fy My Mx Fx NUT UNS 2A Ø NUT UNS 2A Ø * 12 mm travel version shown above * 25 mm travel versions shown below * all dimensions are in millimeters Specifications are subject to change without notice. 2-18
46 Micro Precision Actuator, UHV MPA-20 NEW The MPA-20 linear actuator is designed for ultra high vacuum environments. Typical applications include actuation of manual drive stages and mirror mounts. It utilizes a 2-phase stepper motor and two hermetically sealed mechanical limit switches. The MPA-20 is compatible with the MMC-200 controller. K E Y F E A T U R E S Travel range of 12mm 0.5mm pitch lead screw 200 steps/rev stepper motor with 4:1 gear reduction Load capacity up to kg Preloaded spline for low backlash Hermetically sealed limit switches, UHV compatible Integrated thermal couple T E C H N I C A L D A T A Travel range [mm] Motor option Encoder option Resolution, typical [μm] Repeatability, bi-directional [μm] Repeatability, uni-directional [μm] Accuracy [μm] Materials 12 2-Phase Stepper Motor None (open loop) 0.1 ±1 1 stainless steel body and bearings, phosphor bronze nut aluminum limit switch brackets O R D E R I N G I N F O R M A T I O N MPA D R I V E Stepper Motor, SM T R A V E L E N C O D E R L I M I T S W I T C H E N V I R O N M E N T 12 mm... 1 None... 0 Mechanical... 1 Ultra High Vacuum, mbar
47 phone: +1 (949) fax: +1 (949) Load, max SM-005 F x [N] F y [N] F z [N] M x [N m] M y [N m] M z [N m] k αx [μrad/n m] k αy [μrad/n m] kαx Fz Mz Fx Mx kαy My Fy M x R0.125"
48 Linear Motor P r o d u c t L i n e to scale 3-1
49 3-2
50 Precision Positioning Stage PPS-20LM The PPS-20 Linear Motor version is suitable for applications requiring very fast speeds. Miniature crossed roller bearings assure high stiffness and guiding accuracy for loads up to 20 N (horizontal orientation). Closed loop resolution of 2 nm is achievable. The PPS-20LM is compatible with the MMC-300 controller. K E Y F E A T U R E S Travel range of up to 25 mm 0 nm resolution Load capacity up to 20N Steel crossed roller bearing Low profile, 13 mm height T E C H N I C A L D A T A Travel range [mm] Straightness / Flatness [μm] Pitch [μrad] Yaw [μrad] Weight [g] Motor option Speed, max [mm/s] Encoder option Resolution, typical [nm] Repeatability, bi-directional [μm] Repeatability, uni-directional [μm] Accuracy [μm] Materials 11 ± 1 ± 60 ± 70 - Analog (1 V pp ) ± ± 1 18 ± 1.5 ± 80 ± 90 - Voice Coil Linear Motor 0 Digital (RS-422) aluminum body, steel bearing, stainless steel bracket, brass nut (other materials i.e. stainless steel, titanium, etc. available upon request) 2 ± ± 1 25 ± 1.5 ± 80 ± 90 - O R D E R I N G I N F O R M A T I O N D R I V E T R A V E L E N C O D E R L I M I T S W I T C H E N V I R O N M E N T PPS-20-3 Linear Motor, LM mm mm mm... 3 Analog (1 V pp )... 2 Digital (RS-422)... 3 None... 0 Magnetic... 1 Optical... 2 Atmospheric only available with Digital Encoder option 3-3
51 phone: +1 (949) fax: +1 (949) Load, max LM-003 F x [N] F y [N] F z [N] M x [N m] M y [N m] M z [N m] k αx [μrad/n m] k αy [μrad/n m] kαx Fz Mz Fx Mx kαy My Fy C A A x M2x x 2.20 C'BORE FARSIDE x x 2.2 C'BORE FARSIDE 4 x x M2x B Travel A B C Specifications are subject to change without notice. 3-4
52 Precision Positioning Stage PPS-28LM The PPS-28 Linear Motor version is suitable for applications requiring very fast speeds. Miniature crossed roller bearings assure high stiffness and guiding accuracy for loads up to 50 N (horizontal orientation). Closed loop resolution of 2 nm is achievable. The PPS-28LM is compatible with the MMC-300 controller. K E Y F E A T U R E S Travel range of 26, 51 and 2 mm (other travel lengths available upon request) 2 nm closed loop resolution Load capacity up to 5 kg Steel crossed roller bearing Low profile, 15 mm height T E C H N I C A L D A T A Travel range [mm] Straightness / Flatness [μm] Pitch [μrad] Yaw [μrad] Weight [g] Motor option Speed, max [mm/s] Encoder option Resolution, typical [nm] Repeatability, bi-directional [nm] Repeatability, uni-directional [nm] Accuracy [μm] Materials 26 ± 2 ± 60 ± 70 - Analog (1 V pp ) 51 ± 2.5 ± 70 ± 75 - Linear Motor 0 (dependent on load) Digital (RS-422) 2 ± 50 ± ± 1 ± 1 0 ± 3.5 ± 0 ± 0 - aluminum body, steel bearing (other materials i.e. stainless steel, titanium, etc. available upon request) O R D E R I N G I N F O R M A T I O N PPS-28-3 D R I V E Linear Motor, LM T R A V E L 26 mm mm mm... 5 E N C O D E R Analog (1 V pp )... 2 Digital (RS-422)... 3 L I M I T S W I T C H None... 0 Magnetic... 1 Optical E N V I R O N M E N T Atmospheric... 0 only available with Digital Encoder option 3-5
53 phone: +1 (949) 480 phone: fax: (949) +1 (949) fax: +1 (949) oad, max M-001 Load, max F x [N] F y [N] F x F z [N] [N] FM y x [N] [N m] MF z y [N] [N m] M x z [N m] Mk y αx [N m] [μrad/n m] M z [N m] k αy [μrad/n m] k αx [μrad/n m] k αy [μrad/n m] LM Fz Fz Mz Fz Mz Mz kαx Fx kαy kαx kαx Fx Mx Mx kαy My Fy kαy Fy My My Mx Fx Fy A x A x x Ø x Ø x M2x x M2x x Ø 2.7 Ø FARSIDE 4x Ø 2.7 Ø FARSIDE A+4 A x Ø 3.2 Ø FARSIDE 2 x Ø 3.2 Ø FARSIDE x Ø x Ø A A Travel A Travel A Specifications are subject to change without notice * 26 mm travel, internal * 26 mm encoder travel, version internal shown encoder version shown * all dimensions are * in all millimeters dimensions are in millimeters Specifications are subject to change without notice. 3-6
54 Controller P r o d u c t L i n e
55
56 Modular Motion Controller MMC-0 The MMC-0 is a high performance piezo motor controller. It allows speeds beyond 2 mm/s with our patent-pending multi-phase piezo motor at resolutions of 1 nm. Multiple units can be stacked as a compact multi-axis module and interface with a computer via a single USB or RS-485 cable. MICRONIX Motion Control Language allows for easy programming through simple ASCII commands. K E Y F E A T U R E S Integrated controller for stick-slip, multi-phase piezo stages Compact, modular design allows for bench-top or 2U height rack mounting Open loop resolution down to 1 nm Closed loop resolution down to 2 nm (dependent on encoder) A quad B differential or sin/cos analog encoder feedback USB 2.0 or RS-485 interface (one interface for up to 99 axes) Windows GUI, and LabVIEW VI T E C H N I C A L D A T A Axes Motor type Interface Commands Power supply Speed, max Resolution Trajectory mode Trajectory update frequency Servo clock frequency Program storage Enclosure dimensions Software 1, stackable up to 99 Piezo Motor, PM-002 USB 2.0, RS-485 ASCII commands Regulated 5 V DC (1 A per axis) 2 mm/s 1 nm (open loop), 2 nm (closed loop) Trapezoidal velocity profile 1 khz khz 16 storable programs L145 x W85 x H25 mm Windows GUI, LabVIEW VI O R D E R I N G I N F O R M A T I O N MMC A X E S 1 Axis... 1 : : 6 Axes... 6 P O W E R S U P P L Y 5 W W W... 2 E N C O D E R I N T E R F A C E Analog (1 V pp )... 0 Digital (RS-422)... 1 please contact support for larger stacks 4-3

57 phone: +1 (949) fax: +1 (949) Axes H 4x M3x H 4x M3x Specifications are subject to change without notice. 4-4
58 Modular Motion Driver MMD-0 The MMD-0 is a multi-phase piezo driver with a pulse-direction input. It allows speeds beyond 2 mm/s. Open and closed loop operations are available. The modular design of the MMD-0 allows for a mixed module stack with the MMC-0 controller that can interface with a computer via a single USB or RS-485 cable. MICRONIX Motion Control Language allows for easy programming through simple ASCII commands. K E Y F E A T U R E S Compact, modular design allows for bench-top or 2U height rack mounting MMD-0 and MMC-0 modules can be mixed in a stack Open loop resolution down to 1 nm Closed loop resolution down to 2 nm (dependent on encoder) A quad B differential or sin/cos analog encoder feedback Industry standard pulse and direction input signals via mini-din connector T E C H N I C A L D A T A Axes Motor type Interface Commands Power supply Speed, max Resolution Servo clock frequency Enclosure dimensions 1, stackable up to 99 Piezo Motor, PM-002 USB 2.0 or RS-485 (configuration), mini-din (driver signals) ASCII commands Regulated 5 V DC (1 A per axis) 2 mm/s 1 nm (open loop), 2 nm (closed loop) 20 khz L145 x W85 x H25 mm O R D E R I N G I N F O R M A T I O N MMD A X E S 1 Axis... 1 : : 6 Axes... 6 P O W E R S U P P L Y 5 W W W... 2 E N C O D E R I N T E R F A C E Analog (1 V pp )... 0 Digital (RS-422)... 1 please contact support for larger stacks 4-5
59 phone: +1 (949) fax: +1 (949) H Axes H Specifications are subject to change without notice. 4-6
60 Modular Motion Controller MMC-3 NEW The MMC-3 is a high performance integrated piezo motor controller/driver designed to be used as a standalone 3 axis unit. The MMC-3 is capable of driving 3 piezo motors up to 3mm/s in open loop with a resolution of down to 1nm. The closed loop resolution is dependent on the resolution of the encoder (typically 2nm). MICRONIX Motion Control Language allows for easy programming through simple ASCII commands. K E Y F E A T U R E S Integrated controller for piezo motor stages Open loop resolution down to 1 nm Closed loop resolution down to 2 nm (dependent on encoder) USB 2.0 or RS-485 interface Windows GUI, and LabVIEW VI T E C H N I C A L D A T A Axes Motor type Interface Commands Power supply Speed, max Resolution Trajectory mode Trajectory update frequency Servo clock frequency Program storage Enclosure dimensions Software 3 2-Phase Piezo Motor USB 2.0, RS-485 ASCII commands Regulated 48V DC 3 mm/s 1 nm (open loop), 2 nm (closed loop) 1 khz khz 16 storable programs per axis L191 x W2 x H30 mm Windows GUI, LabVIEW VI O R D E R I N G I N F O R M A T I O N MMC A X E S 3 Axis... 1 P O W E R S U P P L Y 60 W... 0 E N C O D E R I N T E R F A C E Analog (1 V pp )... 0 Digital (RS-422)
61 phone: +1 (949) fax: +1 (949) Note: OEM version shown Available with enclosure x 3.45 THRU
62 Modular Motion Driver MMD-3 NEW The MMD-3 is a piezo motor driver with a pulse-direction input designed to be used as a standalone 3 axis unit. The MMD-3 is capable of driving 3 piezo motors up to 3mm/s in open loop with a resolution of down to 1nm. The MMD-3 can be driven using differential step and direction inputs. MICRONIX Motion Control Language allows for easy setup through simple ASCII commands. K E Y F E A T U R E S Integrated controller for piezo motor stages Open loop resolution down to 1 nm Closed loop resolution down to 2 nm (dependent on encoder) USB 2.0 or RS-485 interface Differential step/direction inputs T E C H N I C A L D A T A Axes 3 Motor type 2-Phase Piezo Motor Interface USB 2.0 or RS-485 (configuration), 15-pin D-sub (driver signals) Commands ASCII commands Power supply Regulated 48V DC Speed, max 3 mm/s Resolution 1 nm (open loop), 2 nm (closed loop) Servo clock frequency 20 khz Enclosure dimensions L198 x W171 x H29 mm O R D E R I N G I N F O R M A T I O N MMD A X E S 3 Axis... 1 P O W E R S U P P L Y 60 W... 0 E N C O D E R I N T E R F A C E Analog (1 V pp )... 0 Digital (RS-422)
63 phone: +1 (949) fax: +1 (949)
64 Modular Motion Controller MMC-200 The MMC-200 is a low cost stepper motor controller. It allows speeds beyond 5 mm/s with closed loop resolutions down to 50 nm. Multiple units can be stacked as a compact multi-axis module and interface with a computer via a single USB or RS-485 cable. MICRONIX Motion Control Language allows for easy programming through simple ASCII commands. K E Y F E A T U R E S Integrated controller for stepper motor stages Compact, modular design allows for bench-top or 2U height rack mounting Closed loop resolution down to 50 nm (dependent on encoder) A quad B differential or sin/cos analog encoder feedback USB 2.0 or RS-485 interface (one interface for up to 99 axes) Windows GUI, and LabVIEW VI T E C H N I C A L D A T A Axes Motor type Interface Commands Power supply Speed, max Resolution Trajectory mode Trajectory update frequency Servo clock frequency Program storage Enclosure dimensions Software 1, stackable up to 99 Stepper Motor USB 2.0, RS-485 ASCII commands Regulated 24 V DC (1 A per axis) 5 mm/s 0 nm (open loop), 50 nm (closed loop) Trapezoidal velocity profile 1 khz khz 16 storable programs L145 x W85 x H25 mm Windows GUI, LabVIEW VI O R D E R I N G I N F O R M A T I O N MMC A X E S 1 Axis... 1 : : 6 Axes... 6 P O W E R S U P P L Y 25 W... 1 E N C O D E R I N T E R F A C E Analog (1 V pp )... 0 Digital (RS-422)... 1 please contact support for larger stacks 4-11
65 phone: +1 (949) fax: +1 (949) H Axes H Specifications are subject to change without notice. 4-12
66 Modular Motion Controller MMC-203 K E Y F E A T U R E S Integrated controller for stepper motor stages Closed loop resolution down to 50 nm (dependent on encoder) NEW The MMC-203 is a high performance integrated stepper motor controller/driver designed to be used as a standalone 3 axis unit. The MMC-203 is capable of driving 3 stepper motors with a resolution as fine as 2000 microsteps per fullstep in open loop and a closed loop resolution of 50nm. Other resolutions are available upon request. MICRONIX Motion Control Language allows for easy programming through simple ASCII commands. USB 2.0 or RS-485 interface Windows GUI, and LabVIEW VI T E C H N I C A L D A T A Axes Motor type Interface Commands Power supply Speed, max Resolution Trajectory mode Trajectory update frequency Servo clock frequency Program storage Enclosure dimensions Software 3 Stepper Motor USB 2.0, RS-485 ASCII commands Regulated 24 V DC (1 A per axis) 5 mm/s 0 nm (open loop), 50 nm (closed loop) 1 khz khz 16 storable programs per axis L145 x W85 x H25 mm Windows GUI, LabVIEW VI O R D E R I N G I N F O R M A T I O N MMC A X E S 3 Axis... 1 P O W E R S U P P L Y 40 W... 1 E N C O D E R I N T E R F A C E Analog (1 V pp )... 0 Digital (RS-422)
67 phone: +1 (949) fax: +1 (949) Note: OEM version shown Available with enclosure 2x 3.4 THRU THRU 4-14
68 Advanced Capabilities
69

70 Vacuum Capabilities Operating a motion system or positioner in vacuum is a design challenge. Issues such as outgassing, contamination, and lack of air cooling complicate the system design. Fortunately, MICRONIX USA has engineered solutions that address each of these problems. Specialized components have been utilized in adapting a given system to a vacuum or otherwise-specified environment. Most of our standard products have been developed with vacuum compatible versions as specified in each product datasheet. Operational Parameters for Vacuum: Two standard vacuum preparation levels High Vacuum (HV), -6 mbar Ultra High Vacuum (UHV), -9 mbar Ultra low-outgassing motors Lubrication Options: Special vacuum-compatible grease Ceramic balls with no grease High Vacuum (HV), -6 mbar Ultra High Vacuum (UHV), -9 mbar Vacuum motor ( mbar) Linear encoder for use in vacuum Cables with teflon wires and silver plated copper shield Standard limit switches All parts left un-anodized Stainless steel screws Bearings, drive screws lubricated with vacuum grease All holes are vented where possible 0ºC baking temperature, 48 hours Vacuum motor (-9 mbar) Linear encoder for use in UHV vacuum Glass scale Cables with teflon wires and silver plated copper shield. Kapton wires optional Sealed limit switches (-9 mbar) All parts left un-anodized Stainless steel screws Bearings, drive screws lubricated with UHV vacuum grease or ceramic balls All holes are vented where possible 0ºC baking temperature, 48 hour
71 Other Capabilities Operational Parameters for Cryogenic Conditions: Cryogenic temperature down to 4K Vacuum preparation down to -9 mbar Lubrication Ceramic balls with no grease (preferred) Dry lube (e.g. Dicronite) Non-Magnetic & Cryogenic Applications: The PPS-series stages can be made for non-magnetic and cryogenic applications. Please contact us at (949) x701 for consultation on your specific application. 5-4
72 System Integration In addition to our extensive standard product line, we provide rapid product development services ranging from customization of existing products to completely customized solutions. We also serve as a systems integrator to create precision motion solutions of any size. Custom Systems Custom system solutions Multi-axis stage combinations 5-5

73 Notes 6-1
X-LSM-SV1 Series: Low vacuum miniature motorized linear stages with built-in controllers
 X-LSM-SV1 Series: Low vacuum miniature motorized linear stages with built-in controllers Vacuum compatible to 10-3 Torr 25, 50, 100, 150, 200 mm travel 10 kg load capacity Up to 100 mm/s speed and up to
X-LSM-SV1 Series: Low vacuum miniature motorized linear stages with built-in controllers Vacuum compatible to 10-3 Torr 25, 50, 100, 150, 200 mm travel 10 kg load capacity Up to 100 mm/s speed and up to
X-LSM-E Series: Miniature motorized linear stages with built-in motor encoder and controllers
 X-LSM-E Series: Miniature motorized linear stages with built-in motor encoder and controllers 25, 50, 100, 150, 200 mm travel 10 kg load capacity Up to 104 mm/s speed and up to 55 N thrust Built-in controller;
X-LSM-E Series: Miniature motorized linear stages with built-in motor encoder and controllers 25, 50, 100, 150, 200 mm travel 10 kg load capacity Up to 104 mm/s speed and up to 55 N thrust Built-in controller;
X-LRQ-SV2 Series: High vacuum motorized linear stages with built-in controllers
 X-LRQ-SV2 Series: High vacuum motorized linear stages with built-in controllers Vacuum compatible to 10-6 torr 75, 150, 300, 450, 600 mm travel 100 kg load capacity Up to 205 mm/s speed and up to 100 N
X-LRQ-SV2 Series: High vacuum motorized linear stages with built-in controllers Vacuum compatible to 10-6 torr 75, 150, 300, 450, 600 mm travel 100 kg load capacity Up to 205 mm/s speed and up to 100 N
X-LRT-EC Series: High-load, closed-loop stages with built-in stepper motors, motor encoders, controllers, and dust covers
 X-LRT-EC Series: High-load, closed-loop stages with built-in stepper motors, motor encoders, controllers, and dust covers 100, 250, 500, 750, 1000, 1500 mm travel 500 kg load capacity High cantilever stiffness
X-LRT-EC Series: High-load, closed-loop stages with built-in stepper motors, motor encoders, controllers, and dust covers 100, 250, 500, 750, 1000, 1500 mm travel 500 kg load capacity High cantilever stiffness
RV SeRieS S P E C I F I C A T I O N S
 SPECIFICATIONS High-Performance Precision Rotation Stages R V S e R i e S GUARANTEED The RV Series rotation stages provide high-precision angular positioning accuracy combined with high load capacity.
SPECIFICATIONS High-Performance Precision Rotation Stages R V S e R i e S GUARANTEED The RV Series rotation stages provide high-precision angular positioning accuracy combined with high load capacity.
Nanomotion Precision Piezo Ceramic Motors
 Nanomotion Precision Piezo Ceramic Motors The Company Nanomotion was founded in 1992 Developed enabling technology for ultrasonic piezo-ceramic motors Entered the market in 1996, selling products to leading
Nanomotion Precision Piezo Ceramic Motors The Company Nanomotion was founded in 1992 Developed enabling technology for ultrasonic piezo-ceramic motors Entered the market in 1996, selling products to leading
Product Description. Further highlights. Outstanding features. 4 Bosch Rexroth Corporation Miniature Linear Modules R310A 2418 (2009.
 4 Bosch Rexroth orporation Miniature Linear Modules R310A 2418 (2009.05) Product Description Outstanding features Rexroth Miniature Linear Modules are precise, ready-to-install linear motion systems that
4 Bosch Rexroth orporation Miniature Linear Modules R310A 2418 (2009.05) Product Description Outstanding features Rexroth Miniature Linear Modules are precise, ready-to-install linear motion systems that
Coating K = TFE wear resist, dry lubricant Kerkote X = Special coating, (Example: Kerkote with grease)
") HAYD: 0 WGS0 Low Profile, Screw Driven Slide WGS0 Linear Rail with Hybrid 000 Series Size Single and Double Stacks and 000 Series Size Single and Double Stacks Kerk Motorized WGS Linear Slide utilizes
HAYD: 0 WGS0 Low Profile, Screw Driven Slide WGS0 Linear Rail with Hybrid 000 Series Size Single and Double Stacks and 000 Series Size Single and Double Stacks Kerk Motorized WGS Linear Slide utilizes
Q-Motion Precision Linear Stage
 Q-Motion Precision Linear Stage High Forces and Small Design Due to Piezo Motors Q-545 Only 45 mm in width Push/pull force 8 N Incremental sensors with position resolution XY combinations without adapter
Q-Motion Precision Linear Stage High Forces and Small Design Due to Piezo Motors Q-545 Only 45 mm in width Push/pull force 8 N Incremental sensors with position resolution XY combinations without adapter
NR ROTARY RING TABLE: FLEXIBLE IN EVERY RESPECT
 NR FREELY PROGRAMMABLE ROTARY TABLES NR ROTARY RING TABLE All NR rings allow customer-specific drive motors to be connected NR ROTARY RING TABLE: FLEXIBLE IN EVERY RESPECT WHEN IT S GOT TO BE EXACT We
NR FREELY PROGRAMMABLE ROTARY TABLES NR ROTARY RING TABLE All NR rings allow customer-specific drive motors to be connected NR ROTARY RING TABLE: FLEXIBLE IN EVERY RESPECT WHEN IT S GOT TO BE EXACT We
Controlling Thermal Expansion
 Controlling Thermal Expansion Strategies for Maximizing the Repeatability of your Linear Stage By David Goosen, Mechanical Engineering Team INTRODUCTION Most of us are aware that all common engineering
Controlling Thermal Expansion Strategies for Maximizing the Repeatability of your Linear Stage By David Goosen, Mechanical Engineering Team INTRODUCTION Most of us are aware that all common engineering
Selection Calculations For Linear & Rotary Actuators
 H-8 For Electric Linear Slides and Electric Cylinders First determine your series, then select your product. Select the actuator that you will use based on the following flow charts: Selection Procedure
H-8 For Electric Linear Slides and Electric Cylinders First determine your series, then select your product. Select the actuator that you will use based on the following flow charts: Selection Procedure
CTV series CHARACTERISTICS LINEAR UNITS
 CTV series CHARACTERISTICS The CTV series describes s with a precision ball screw drive and two parallel, integrated, Zerobacklash rail guides. Compact dimensions allow high performance features such as,
CTV series CHARACTERISTICS The CTV series describes s with a precision ball screw drive and two parallel, integrated, Zerobacklash rail guides. Compact dimensions allow high performance features such as,
RGS08 Linear Rails: RGS08 Non-Motorized With and Without Guide Screw. RGS08 Non-Motorized Linear Rails
 RGS08 RGS08 Non-Motorized With and Without Guide RGS08 Non-Motorized Linear Rails RG Series linear rails are available: RGS08 Non-Motorized, -driven linear rail RGS08 Non-Motorized linear rail without
RGS08 RGS08 Non-Motorized With and Without Guide RGS08 Non-Motorized Linear Rails RG Series linear rails are available: RGS08 Non-Motorized, -driven linear rail RGS08 Non-Motorized linear rail without
Rail Guide Modular Linear Actuators DSM
 Roller Guide Modular Linear Actuators DLM, DLVM Rail Guide Modular Linear Actuators DSM nookindustries.com toll-free (800) 32-7800 25 DLM 20, 60, 200 Linear Motor Drive Specifications Function: This unit
Roller Guide Modular Linear Actuators DLM, DLVM Rail Guide Modular Linear Actuators DSM nookindustries.com toll-free (800) 32-7800 25 DLM 20, 60, 200 Linear Motor Drive Specifications Function: This unit
RGS06 Linear Rails: RGS06 Non-Motorized With and Without Guide Screw. RGS06 Non-Motorized Linear Rails
 on-motorized With and Without Guide on-motorized Linear Rails RG Series linear rails are available: on-motorized, -driven linear rail on-motorized, Wide format, -driven linear rail on-motorized, Wide format,
on-motorized With and Without Guide on-motorized Linear Rails RG Series linear rails are available: on-motorized, -driven linear rail on-motorized, Wide format, -driven linear rail on-motorized, Wide format,
Ball screw. Linear. Coupling cover. 1Positioning table of a structure with enhanced sealing property. 3 High corrosion resistance
 Cleanroom Precision Positioning Table TC Ball screw TC EB Slide table inear Way Side cover Stainless sheet Motor bracket inear Coupling cover Pipe threads for suction connector Points ight weight, low
Cleanroom Precision Positioning Table TC Ball screw TC EB Slide table inear Way Side cover Stainless sheet Motor bracket inear Coupling cover Pipe threads for suction connector Points ight weight, low
Product description. Compact Modules. Characteristic features. Further highlights
 4 Compact Modules Product description Characteristic features Five fine-tuned sizes based on a compact precision aluminum profile with two integrated pre-tensioned ball rail systems Identical external
4 Compact Modules Product description Characteristic features Five fine-tuned sizes based on a compact precision aluminum profile with two integrated pre-tensioned ball rail systems Identical external
R-Plus System Frontespizio_R_PlusSystem.indd 1 11/06/ :32:02
 R-Plus System R-Plus System R-Plus system R-Plus system description Fig. R-Plus system R-Plus System is Rollon s series of rack & pinion driven actuators. Rollon R-Plus System series linear units are designed
R-Plus System R-Plus System R-Plus system R-Plus system description Fig. R-Plus system R-Plus System is Rollon s series of rack & pinion driven actuators. Rollon R-Plus System series linear units are designed
Drive Units with Ball Screw Drives R310EN 3304 ( ) The Drive & Control Company
 The Drive & Control Company") Drive Units with Ball Screw Drives R310EN 3304 (2007.05) The Drive & Control Company Linear Motion and Assembly Technologies Ball Rail Systems Roller Rail Systems Linear Bushings and Shafts Precision Ball
Drive Units with Ball Screw Drives R310EN 3304 (2007.05) The Drive & Control Company Linear Motion and Assembly Technologies Ball Rail Systems Roller Rail Systems Linear Bushings and Shafts Precision Ball
Development of the Screw-driven Motors by Stacked Piezoelectric Actuators
 Proceedings of the 4th IIAE International Conference on Industrial Application Engineering 2016 Development of the Screw-driven Motors by Stacked Piezoelectric Actuators Shine-Tzong Ho a,*, Hao-Wei Chen
Proceedings of the 4th IIAE International Conference on Industrial Application Engineering 2016 Development of the Screw-driven Motors by Stacked Piezoelectric Actuators Shine-Tzong Ho a,*, Hao-Wei Chen
LINE TECH Linear Modules. Ready to built-in linear modules with drive
 Ready to built-in linear modules with drive Anodized profile, produced in extrusion molding method Linear rail guiding system (LM3 LM5) Actuation by ball screw, high-helix lead _ screw or toothed belt
Ready to built-in linear modules with drive Anodized profile, produced in extrusion molding method Linear rail guiding system (LM3 LM5) Actuation by ball screw, high-helix lead _ screw or toothed belt
Linear guide drives. Synchronous shafts The use of synchronous shafts enables several linear axes to be operated with one drive.
 Linear guide drives Drive concept The linear guides are driven via the hollow shaft in the drive head. The drive head is used to directly install a motor or alternatively (in connection with a center shaft)
Linear guide drives Drive concept The linear guides are driven via the hollow shaft in the drive head. The drive head is used to directly install a motor or alternatively (in connection with a center shaft)
Precision Ball Screw/Spline
 58-2E Models BNS-A, BNS, NS-A and NS Seal Outer ring Shim plate Seal Spline nut Seal Collar Shim plate Seal End cap Ball Outer ring Ball screw nut Outer ring Ball Retainer Retainer Outer ring Point of
58-2E Models BNS-A, BNS, NS-A and NS Seal Outer ring Shim plate Seal Spline nut Seal Collar Shim plate Seal End cap Ball Outer ring Ball screw nut Outer ring Ball Retainer Retainer Outer ring Point of
THE LOSMANDY G-11 MOUNT
 Checking the parts THE LOSMANDY G-11 MOUNT Depending on which accessories you ordered, your G-11 mount was shipped in four or more boxes. The contents of each box are as follows: Equatorial Mount Adjustable
Checking the parts THE LOSMANDY G-11 MOUNT Depending on which accessories you ordered, your G-11 mount was shipped in four or more boxes. The contents of each box are as follows: Equatorial Mount Adjustable
BRIGHT-STRATO SERIES
 Coordinate Measuring Machines BRIGHT-STRATO SERIES CNC Coordinate Measuring Machine Bulletin No. 1855 Moving-bridge type CMM with excellent measuring accuracy. Its measuring envelope is suitable for medium-to-large
Coordinate Measuring Machines BRIGHT-STRATO SERIES CNC Coordinate Measuring Machine Bulletin No. 1855 Moving-bridge type CMM with excellent measuring accuracy. Its measuring envelope is suitable for medium-to-large
High speed and quick response precise linear stage system using V-shape transducer ultrasonic motors
 High speed and quick response precise linear stage system using V-shape transducer ultrasonic motors K. Asumi, T. Fujimura and M. K. Kurosawa Taiheiyo-cement Corporation, Japan Tokyo Institute of Technology,
High speed and quick response precise linear stage system using V-shape transducer ultrasonic motors K. Asumi, T. Fujimura and M. K. Kurosawa Taiheiyo-cement Corporation, Japan Tokyo Institute of Technology,
Cam Roller Guides. The Drive and Control Company. Service Automation. Electric Drives and Controls. Linear Motion and Assembly Technologies
 Industrial Hydraulics Electric Drives and Controls Linear Motion and Assembly Technologies Pneumatics Service Automation Mobile Hydraulics Cam Roller Guides The Drive and Control Company Linear Motion
Industrial Hydraulics Electric Drives and Controls Linear Motion and Assembly Technologies Pneumatics Service Automation Mobile Hydraulics Cam Roller Guides The Drive and Control Company Linear Motion
the foundation of any business starts here
 the foundation of any business starts here TABLE OF CONTENT The Company... 3 Electric Motors... 4 Gearboxes... 5 Automation Products... 6 Electric Components... 9 Pneumatics... 12 Hydraulics... 13 Handling
the foundation of any business starts here TABLE OF CONTENT The Company... 3 Electric Motors... 4 Gearboxes... 5 Automation Products... 6 Electric Components... 9 Pneumatics... 12 Hydraulics... 13 Handling
M/60210/M Miniature rotary actuators
 M/6020/M Miniature rotary actuators Double acting - Magnetic piston - Ø 2 and 20 mm Smooth operation with zero backlash Lightweight ompact envelope dimensions Integral magnets for positional feedback TEHNIL
M/6020/M Miniature rotary actuators Double acting - Magnetic piston - Ø 2 and 20 mm Smooth operation with zero backlash Lightweight ompact envelope dimensions Integral magnets for positional feedback TEHNIL
6) Motors and Encoders
 Motors and Encoders") 6) Motors and Encoders Electric motors are by far the most common component to supply mechanical input to a linear motion system. Stepper motors and servo motors are the popular choices in linear motion
6) Motors and Encoders Electric motors are by far the most common component to supply mechanical input to a linear motion system. Stepper motors and servo motors are the popular choices in linear motion
Identification system for short product names. Changes/amendments at a glance. 2 Bosch Rexroth AG OBB omega modules R ( )
") Omega Modules OBB 2 OBB omega modules R9990079 (206-05) Identification system for short product names Short product name Example: O B B - 085 - N N - System = Omega module Guideway = Ball Rail System Drive
Omega Modules OBB 2 OBB omega modules R9990079 (206-05) Identification system for short product names Short product name Example: O B B - 085 - N N - System = Omega module Guideway = Ball Rail System Drive
TE 75R RESEARCH RUBBER FRICTION TEST MACHINE
 TE 75R RESEARCH RUBBER FRICTION TEST MACHINE Background: The Research Rubber Friction Test Machine offers the ability to investigate fully the frictional behaviour of rubbery materials both in dry and
TE 75R RESEARCH RUBBER FRICTION TEST MACHINE Background: The Research Rubber Friction Test Machine offers the ability to investigate fully the frictional behaviour of rubbery materials both in dry and
I-FORCE Ironless linear motors
 I-FORCE Ironless linear motors Parker Trilogy s I-Force ironless linear motors offer high forces and rapid accelerations in a compact package. With forces ranging from 5.5 lbf (24.5 N) - 197.5 lbf (878.6
I-FORCE Ironless linear motors Parker Trilogy s I-Force ironless linear motors offer high forces and rapid accelerations in a compact package. With forces ranging from 5.5 lbf (24.5 N) - 197.5 lbf (878.6
Selection Calculations For Motorized Actuators
 Selection Calculations/ Selection Calculations For Linear Slides and Cylinders Select from the EZS Series, EZS Series for Cleanroom Use, EZC Series First determine your series, then select your model.
Selection Calculations/ Selection Calculations For Linear Slides and Cylinders Select from the EZS Series, EZS Series for Cleanroom Use, EZC Series First determine your series, then select your model.
Points. Precision Positioning Table TU. Variation. Major product specifications With flange
 9 0 Precision Positioning Table Ball screw inear Points lide table with high accuracy and high rigidity in a single structure lide table Compact and slim type positioning table with an original U-shaped
9 0 Precision Positioning Table Ball screw inear Points lide table with high accuracy and high rigidity in a single structure lide table Compact and slim type positioning table with an original U-shaped
Metrology Prof. Dr Kanakuppi Sadashivappa Bapuji Institute of Engineering and Technology Davangere
 Metrology Prof. Dr Kanakuppi Sadashivappa Bapuji Institute of Engineering and Technology Davangere Lecture 32 Introduction To Comparators, Mechanical Comparators (Refer Slide Time: 00:15) I welcome you
Metrology Prof. Dr Kanakuppi Sadashivappa Bapuji Institute of Engineering and Technology Davangere Lecture 32 Introduction To Comparators, Mechanical Comparators (Refer Slide Time: 00:15) I welcome you
Welcome to where precision is. Large Ball Screws Diameter mm
 Welcome to where precision is. Large Ball Screws Diameter mm Large Ball Screws Diameter mm This section includes nuts with standard dimensions per ISO 8 / DIN 1. In most cases, there is a choice of three
Welcome to where precision is. Large Ball Screws Diameter mm Large Ball Screws Diameter mm This section includes nuts with standard dimensions per ISO 8 / DIN 1. In most cases, there is a choice of three
EUCLID M2 MIRROR MECHANISM
 EUCLID M2 MIRROR MECHANISM Aiala Artiagoitia (1), Carlos Compostizo (1), Laura Rivera (1) (1) SENER, Av. Zugazarte 56, 48930 Las Arenas (Bizkaia) Spain, Email: aiala.artiagoitia@sener.es ABSTRACT Euclid
EUCLID M2 MIRROR MECHANISM Aiala Artiagoitia (1), Carlos Compostizo (1), Laura Rivera (1) (1) SENER, Av. Zugazarte 56, 48930 Las Arenas (Bizkaia) Spain, Email: aiala.artiagoitia@sener.es ABSTRACT Euclid
1 Linear feeder 2 Track 3 Cover 4 Side plate 5 Trim weight 6 Sub-structure. 8 Feeding technology afag.com
 Linear feeder Track Cover Side plate Trim weight Sub-structure 8 Feeding technology 0 Linear feeder Linear feeder Linear feeder HLF-M Linear feeder HLF-P 8 Control devices PSG Accessory HLF Linear feeder
Linear feeder Track Cover Side plate Trim weight Sub-structure 8 Feeding technology 0 Linear feeder Linear feeder Linear feeder HLF-M Linear feeder HLF-P 8 Control devices PSG Accessory HLF Linear feeder
SURVEY AND ALIGNMENT FOR THE SYNCHROTRON LIGHT SOURCE ELETTRA
 I/49 SURVEY AND ALIGNMENT FOR THE SYNCHROTRON LIGHT SOURCE ELETTRA ABSTRACT: F.Wei, A.Bergamo, P.Furlan, J.Grgic, A.Wrulich Sincrotrone Trieste Padriciano 99, 34012 Trieste, Italy ELETTRA is a third generation
I/49 SURVEY AND ALIGNMENT FOR THE SYNCHROTRON LIGHT SOURCE ELETTRA ABSTRACT: F.Wei, A.Bergamo, P.Furlan, J.Grgic, A.Wrulich Sincrotrone Trieste Padriciano 99, 34012 Trieste, Italy ELETTRA is a third generation
SKF actuators available for quick delivery. Selection guide
 SKF actuators available for quick delivery Selection guide A wide range of SKF actuators available for quick delivery Industrial actuator 24 Volt DC Load range 1 000 to 4 000 N Speed range 5 to 52 mm/s
SKF actuators available for quick delivery Selection guide A wide range of SKF actuators available for quick delivery Industrial actuator 24 Volt DC Load range 1 000 to 4 000 N Speed range 5 to 52 mm/s
Height Master Page 343. Check Master Page 347. Calibration Tools Page 352
 Calibration Instruments Height Master Page 343 Check Master Page 347 Calibration Tools Page 352 342 Digital Height Master Functions ZERO/ABS DATA/HOLD Auto Power OFF after 20 min. non use Low voltage alarm
Calibration Instruments Height Master Page 343 Check Master Page 347 Calibration Tools Page 352 342 Digital Height Master Functions ZERO/ABS DATA/HOLD Auto Power OFF after 20 min. non use Low voltage alarm
R310EN 2403 ( ) The Drive & Control Company
 The Drive & Control Company") Feed Modules VKK R310EN 2403 (2008.09) The Drive & Control Company Linear Motion and Assembly Technologies Ball Rail Systems Roller Rail Systems Linear Bushings and Shafts Ball Screw Drives Linear Motion
Feed Modules VKK R310EN 2403 (2008.09) The Drive & Control Company Linear Motion and Assembly Technologies Ball Rail Systems Roller Rail Systems Linear Bushings and Shafts Ball Screw Drives Linear Motion
Machine Positioning Uncertainty with Laser Interferometer Feedback
 Machine Positioning Uncertainty with Laser Interferometer Feedback The purpose of this discussion is to explain the major contributors to machine positioning uncertainty in systems with laser interferometer
Machine Positioning Uncertainty with Laser Interferometer Feedback The purpose of this discussion is to explain the major contributors to machine positioning uncertainty in systems with laser interferometer
ED 701 General Industry Pressure Transmitter
 ED 701 General Industry Pressure Transmitter Standard industrial process connections Complete range of electrical connections 4... 20 ma and Voltage outputs Accuracy: 0.1%, 0.2% and 0.4% FS Quick response
ED 701 General Industry Pressure Transmitter Standard industrial process connections Complete range of electrical connections 4... 20 ma and Voltage outputs Accuracy: 0.1%, 0.2% and 0.4% FS Quick response
DISCONTINUED PRECISION MEASURING FOWLER CALIPERS 1 - VERNIER CALIPERS 4 - ELECTRONIC CALIPERS
 FOWLER CALIPERS 1 - VERNIER CALIPERS 4 - ELECTRONIC CALIPERS 52-058-016 Fine quality vernier calipers are constructed of stainless steel. 52-057-004 offers 3-way measurement to accuracy. 52-058-XXX series
FOWLER CALIPERS 1 - VERNIER CALIPERS 4 - ELECTRONIC CALIPERS 52-058-016 Fine quality vernier calipers are constructed of stainless steel. 52-057-004 offers 3-way measurement to accuracy. 52-058-XXX series
Rotary modules.
 Rotary modules www.comoso.com www.comoso.com Rotary modules ROTARY MODULES Series Size Page Rotary modules RM swivel unit 156 RM 08 160 RM 10 162 RM 12 164 RM 15 168 RM 21 172 RM rotor 176 RM 50 180 RM
Rotary modules www.comoso.com www.comoso.com Rotary modules ROTARY MODULES Series Size Page Rotary modules RM swivel unit 156 RM 08 160 RM 10 162 RM 12 164 RM 15 168 RM 21 172 RM rotor 176 RM 50 180 RM
Nanoscale work function measurements by Scanning Tunneling Spectroscopy
 Related Topics Tunneling effect, Defects, Scanning Tunneling Microscopy (STM), (STS), Local Density of States (LDOS), Work function, Surface activation, Catalysis Principle Scanning tunneling microscopy
Related Topics Tunneling effect, Defects, Scanning Tunneling Microscopy (STM), (STS), Local Density of States (LDOS), Work function, Surface activation, Catalysis Principle Scanning tunneling microscopy
LT130LDGS Single table
 T0DGS Single table K(mounting hole: pitch) 0 30 S(stroke) 0 0 4-M Depth 9( 1 ) Hole for n-m4 3. 43 imit 87. 1 K n T0DGS- 240 240 80 0 8 7.6 T0DGS- 7 7 1 000 80 840 16. T0DGS-0 1 1 480 80 24 19.4 T0DGS-1680
T0DGS Single table K(mounting hole: pitch) 0 30 S(stroke) 0 0 4-M Depth 9( 1 ) Hole for n-m4 3. 43 imit 87. 1 K n T0DGS- 240 240 80 0 8 7.6 T0DGS- 7 7 1 000 80 840 16. T0DGS-0 1 1 480 80 24 19.4 T0DGS-1680
Panel Mount, Single Phase 120 and 240 Volt Fixed Shaft (click blue text for more details)
") Staco Energy Products Co. has been a leading manufacturer of variable transformers for over 60 years, building standard as well as custom-designed products for industrial, commercial and military applications.
Staco Energy Products Co. has been a leading manufacturer of variable transformers for over 60 years, building standard as well as custom-designed products for industrial, commercial and military applications.
Series MHY2/MHW Angular Gripper. Cam actuation style is now standardized! MHZ2 MHZJ2 MHQ MHL2 MHR MHK MHS MHC2 MHT2 MHY2 MHW2 MRHQ 2.
 18 Angular Gripper Cam Style Rack & Pinion Style Series / Cam actuation style is now standardized! 2.8-1 18 Angular Gripper 18 Angular Gripper Series / Cam Style Rack & Pinion Style Series / Series MHY/Cam
18 Angular Gripper Cam Style Rack & Pinion Style Series / Cam actuation style is now standardized! 2.8-1 18 Angular Gripper 18 Angular Gripper Series / Cam Style Rack & Pinion Style Series / Series MHY/Cam
Miniature (SEB Type) Tapped-Hole rail Types: Slide guides with clearance holes are standard and tapped holes are available upon request.
 Tapped-Hole rail Types: Slide guides with clearance holes are standard and tapped holes are available upon request.") Miniature (SE Type) The SE type slide guide is a linear motion bearing in which the ball elements roll along two tracking grooves. This is the smallest and lightest slide guide series offered by Nippon
Miniature (SE Type) The SE type slide guide is a linear motion bearing in which the ball elements roll along two tracking grooves. This is the smallest and lightest slide guide series offered by Nippon
Circular Motion and Centripetal Force
 [For International Campus Lab ONLY] Objective Measure the centripetal force with the radius, mass, and speed of a particle in uniform circular motion. Theory ----------------------------- Reference --------------------------
[For International Campus Lab ONLY] Objective Measure the centripetal force with the radius, mass, and speed of a particle in uniform circular motion. Theory ----------------------------- Reference --------------------------
STUD & TRACK ROLL FORMING MACHINE
 STUD & TRACK ROLL FORMING MACHINE R O L L F O R M E R S U S A I W W W. R O L L F O R M E R S - U S A. C O M Page1 Cantilevered Dual Headed 6,000 lb Decoiler Includes mandrel and stand Can accommodate 22
STUD & TRACK ROLL FORMING MACHINE R O L L F O R M E R S U S A I W W W. R O L L F O R M E R S - U S A. C O M Page1 Cantilevered Dual Headed 6,000 lb Decoiler Includes mandrel and stand Can accommodate 22
Coordinate Measuring Machines Coordinate INDEX Measuring Machines Coordinate Measuring Machines New Products
 Coordinate Measuring Machines Coordinate Measuring Machines New Products INDEX Coordinate Measuring Machines Crysta-Apex Series L-2, 3 LEGEX Series L-4 Bright-STRATO Series L-5, 6 CP Series L-6 CARBstrato
Coordinate Measuring Machines Coordinate Measuring Machines New Products INDEX Coordinate Measuring Machines Crysta-Apex Series L-2, 3 LEGEX Series L-4 Bright-STRATO Series L-5, 6 CP Series L-6 CARBstrato
GAIA M2M POINTING MECHANISM QUALIFICATION
 GAIA M2M POINTING MECHANISM QUALIFICATION Carlos Compostizo (1), Ricardo López (1), Laura Rivera (1) (1) SENER-Structures & Mechanisms Section, Av. Zugazarte 56, 4893 Las Arenas (Vizcaya) Spain Tel: 34944817578
GAIA M2M POINTING MECHANISM QUALIFICATION Carlos Compostizo (1), Ricardo López (1), Laura Rivera (1) (1) SENER-Structures & Mechanisms Section, Av. Zugazarte 56, 4893 Las Arenas (Vizcaya) Spain Tel: 34944817578
Technical Guide for Servo Motor Selection
 Technical Guide for Servo otor Selection CS_Servo Selection_TG_E_3_1 Servo otor Selection Software Use your PC to select a Servo otor "otor Selection Program for Windows" o you always feel "Calculation
Technical Guide for Servo otor Selection CS_Servo Selection_TG_E_3_1 Servo otor Selection Software Use your PC to select a Servo otor "otor Selection Program for Windows" o you always feel "Calculation
ElectroMechanical Cylinder LEMC
 www.lmotion.ru lmotionmail@ya.ru.: (9)9160 ElectroMechanical Cylinder LEMC THE POWER OF KNOWLEDGE ENGINEERING www.lmotion.ru lmotionmail@ya.ru.: (9)9160 ElectroMechanical Cylinder LEMC enefits High efficiency
www.lmotion.ru lmotionmail@ya.ru.: (9)9160 ElectroMechanical Cylinder LEMC THE POWER OF KNOWLEDGE ENGINEERING www.lmotion.ru lmotionmail@ya.ru.: (9)9160 ElectroMechanical Cylinder LEMC enefits High efficiency
Servo Motor Selection Flow Chart
 Servo otor Selection Flow Chart START Selection Has the machine Been Selected? YES NO Explanation etermine the size, mass, coefficient of References friction, and external forces of all the moving part
Servo otor Selection Flow Chart START Selection Has the machine Been Selected? YES NO Explanation etermine the size, mass, coefficient of References friction, and external forces of all the moving part
Piezoelectric Actuators and Future Motors for Cryogenic Applications in Space
 Piezoelectric Actuators and Future Motors for Cryogenic Applications in Space Christian Belly*, Francois Barillot* and Fabien Dubois * Abstract The purpose of this paper is to present the current investigation
Piezoelectric Actuators and Future Motors for Cryogenic Applications in Space Christian Belly*, Francois Barillot* and Fabien Dubois * Abstract The purpose of this paper is to present the current investigation
Motion Control. Laboratory assignment. Case study. Lectures. compliance, backlash and nonlinear friction. control strategies to improve performance
 436-459 Advanced Control and Automation Motion Control Lectures traditional CNC control architecture modelling of components dynamic response of axes effects on contouring performance control strategies
436-459 Advanced Control and Automation Motion Control Lectures traditional CNC control architecture modelling of components dynamic response of axes effects on contouring performance control strategies
Application example. Measuring Force Sensors Rigid. Six series Nano, Mini, Gamma, Delta, Theta, Omega. Range of measurement, force ± 36 N..
 FT Six series Nano, Mini, Gamma, Delta, Theta, Omega Range of measurement, force ± 36 N.. ± 40000 N Range of measurement, moment ± 0.5 Nm.. ± 6000 Nm Application example Robot-supported chamfering of round
FT Six series Nano, Mini, Gamma, Delta, Theta, Omega Range of measurement, force ± 36 N.. ± 40000 N Range of measurement, moment ± 0.5 Nm.. ± 6000 Nm Application example Robot-supported chamfering of round
Characterization of Fixture-Workpiece Static Friction
 Characterization of Fixture-Workpiece Static Friction By Jose F. Hurtado Shreyes N. Melkote Precision Manufacturing Research Consortium Georgia Institute of Technology Sponsors: NSF, GM R&D Center Background
Characterization of Fixture-Workpiece Static Friction By Jose F. Hurtado Shreyes N. Melkote Precision Manufacturing Research Consortium Georgia Institute of Technology Sponsors: NSF, GM R&D Center Background
APPENDIX. SELECTING THE SureServo SERVO SYSTEM. In This Appendix... Selecting the SureServo Servo System...B 2. Leadscrew - Example Calculations...
 SELECTING THE SureServo SERVO SYSTEM APPENDIX B In This Appendix... Selecting the SureServo Servo System............B 2 The Selection Procedure......................................B 2 How many pulses
SELECTING THE SureServo SERVO SYSTEM APPENDIX B In This Appendix... Selecting the SureServo Servo System............B 2 The Selection Procedure......................................B 2 How many pulses
Measuring methods. Measuring tools. Measuring methods. Measuring tools. Measuring methods. Measuring tools. Measuring methods. 5. Smoothness testing
 1. Parallelism testing / Height testing Dial gauge and Dial indicator 2. Fix the measuring tools on the actuator s slider. 2. Absolute straightness accuracy testing Laser interferometer detection 2. Fix
1. Parallelism testing / Height testing Dial gauge and Dial indicator 2. Fix the measuring tools on the actuator s slider. 2. Absolute straightness accuracy testing Laser interferometer detection 2. Fix
ElectroMechanical Cylinder LEMC
 ElectroMechanical Cylinder EMC ElectroMechanical Cylinder EMC enefits High eficiency ong service life from use of SKF planetary roller screw Compact and robust structural design Modular concept with multiple
ElectroMechanical Cylinder EMC ElectroMechanical Cylinder EMC enefits High eficiency ong service life from use of SKF planetary roller screw Compact and robust structural design Modular concept with multiple
HPG xxx 030 C1 C2 C3. High performance angle gearboxes. Output. Input. Drawings. C with option motor flange. View x. Centering View y.
 HPG 030 1 2 3 Input Output 1 View M6 ( deep) 0 Ø4 H (2.2 deep) 18.0 M6 ( deep) 0 2 3 M6 ( deep) 2 13.0 4 2.0 18.0 24.0 M Ø12 k6 6 M6 ( deep) M6 ( deep) 3 Eample HPG 030 2 with option motor flange 0 M6
HPG 030 1 2 3 Input Output 1 View M6 ( deep) 0 Ø4 H (2.2 deep) 18.0 M6 ( deep) 0 2 3 M6 ( deep) 2 13.0 4 2.0 18.0 24.0 M Ø12 k6 6 M6 ( deep) M6 ( deep) 3 Eample HPG 030 2 with option motor flange 0 M6
U.S. Patents 6,290,217 6,244,579
 CR CR Series Overview U.S. Patents 6,90,7 6,,579 For the best in vibration isolation capabilities, choose Enidine s. Smaller than traditional wire ropes, these unique isolators provide cost-effective,
CR CR Series Overview U.S. Patents 6,90,7 6,,579 For the best in vibration isolation capabilities, choose Enidine s. Smaller than traditional wire ropes, these unique isolators provide cost-effective,
An investigation into the relative accuracy of ball-screws and linear encoders over a broad range of application configurations and usage conditions
 An investigation into the relative accuracy of ball-screws and linear encoders over a broad range of application configurations and usage conditions A.J. White, S.R. Postlethwaite, D.G. Ford Precision
An investigation into the relative accuracy of ball-screws and linear encoders over a broad range of application configurations and usage conditions A.J. White, S.R. Postlethwaite, D.G. Ford Precision
Linear Shaft Motor Sizing Application Note
 Linear Shaft Motor Sizing Application Note By Jeramé Chamberlain One of the most straightforward tasks in the design of a linear motion system is to specify a motor and drive combination that can provide
Linear Shaft Motor Sizing Application Note By Jeramé Chamberlain One of the most straightforward tasks in the design of a linear motion system is to specify a motor and drive combination that can provide
E D D Y C U R R E N T D A M P E R A P P L I C AT I O N D ATA
 E D D Y C U R R E N T D A M P E R A P P I C AT I O N D ATA CDA InterCorp CDA InterCorp INTRODUCTION This application manual defines the performance capabilities of CDA InterCorp s Eddy Current Damper Product
E D D Y C U R R E N T D A M P E R A P P I C AT I O N D ATA CDA InterCorp CDA InterCorp INTRODUCTION This application manual defines the performance capabilities of CDA InterCorp s Eddy Current Damper Product
DIM. A (+ 0,05 0,51) .135 ±.015 (3,43 ± 0,38) COMMON LUG INTEGRAL ASSEMBLY NUT, DO NOT REMOVE 1/4-32 UNEF-2A THREAD
 .135 ±.015 (3,43 ± 0,38) COMMON LUG INTEGRAL ASSEMBLY NUT, DO NOT REMOVE 1/4-32 UNEF-2A THREAD") Multi-Deck SERIES 0 SERIES 0 0." Diameter, / Amp, Standard, Military SR FEATURES Proven Quality in Thousands of Applications Gold-plated Contact System 0,,, 0 and 0 Angle Options MIL Qualified Versions
Multi-Deck SERIES 0 SERIES 0 0." Diameter, / Amp, Standard, Military SR FEATURES Proven Quality in Thousands of Applications Gold-plated Contact System 0,,, 0 and 0 Angle Options MIL Qualified Versions
Inverted Pendulum System
 Introduction Inverted Pendulum System This lab experiment consists of two experimental procedures, each with sub parts. Experiment 1 is used to determine the system parameters needed to implement a controller.
Introduction Inverted Pendulum System This lab experiment consists of two experimental procedures, each with sub parts. Experiment 1 is used to determine the system parameters needed to implement a controller.
An Energy Circulation Driving Surface Acoustic Wave Motor
 An Energy Circulation Driving Surface Acoustic Wave Motor Minoru K. Kurosawa Tokyo Institute of Technology Yokohama, Japan mkur@ae.titech.ac.jp Purevdagva Nayanbuu Tokyo Institute of Technology Yokohama,
An Energy Circulation Driving Surface Acoustic Wave Motor Minoru K. Kurosawa Tokyo Institute of Technology Yokohama, Japan mkur@ae.titech.ac.jp Purevdagva Nayanbuu Tokyo Institute of Technology Yokohama,
Microscopy Cryostat System
 OF AMERICA, INC. Microscopy Cryostat System RC102-CFM Microscopy Cryostat offers fast cooldown, high efficiency, lowest thermal drift, excellent temperature stability and ultra low vibration Optical cryostat
OF AMERICA, INC. Microscopy Cryostat System RC102-CFM Microscopy Cryostat offers fast cooldown, high efficiency, lowest thermal drift, excellent temperature stability and ultra low vibration Optical cryostat
Miniature Slide Guide Series with Retained Ball now Offers Complete Selection
 Miniature Slide Guide Series with Retained Ball now Offers Complete Selection Wide type of Miniature Slide Guide, providing greater allowable moment, is now available with retained ball structure. Due
Miniature Slide Guide Series with Retained Ball now Offers Complete Selection Wide type of Miniature Slide Guide, providing greater allowable moment, is now available with retained ball structure. Due
Engineering Reference
 Engineering Reference Sizing and Selection of Exlar Linear and Rotary Actuators Move Profiles The first step in analyzing a motion control application and selecting an actuator is to determine the required
Engineering Reference Sizing and Selection of Exlar Linear and Rotary Actuators Move Profiles The first step in analyzing a motion control application and selecting an actuator is to determine the required
Vacuum Kelvin Force Probe Research Richard Williams August 1st 2008
 Vacuum Kelvin Force Probe Research Richard Williams August 1st 2008 Introduction Kelvin Force Probe Microscopy is an analytical method to measure the contact potential difference between a reference material
Vacuum Kelvin Force Probe Research Richard Williams August 1st 2008 Introduction Kelvin Force Probe Microscopy is an analytical method to measure the contact potential difference between a reference material
Ultra-High Vacuum Technology. Sputter Ion Pumps l/s
 Ultra-High Vacuum Technology 30-400 l/s 181.06.01 Excerpt from the Product Chapter C15 Edition November 2007 Contents General General..........................................................................
Ultra-High Vacuum Technology 30-400 l/s 181.06.01 Excerpt from the Product Chapter C15 Edition November 2007 Contents General General..........................................................................
Centripetal and centrifugal force
 Introduction In the everyday language use, the centrifugal force is often referred to as the cause of the occurring force during a uniform non-linear motion. Situated in a moving object that changes its
Introduction In the everyday language use, the centrifugal force is often referred to as the cause of the occurring force during a uniform non-linear motion. Situated in a moving object that changes its
Model M3484 Industrial Line Noise Filter Module Customer Reference Manual
 Model M3484 Industrial Line Noise Filter Module Customer Reference Manual Web: www.bonitron.com Tel: 615-244-2825 Email: info@bonitron.com Bonitron, Inc. Bonitron, Inc. Nashville, TN An industry leader
Model M3484 Industrial Line Noise Filter Module Customer Reference Manual Web: www.bonitron.com Tel: 615-244-2825 Email: info@bonitron.com Bonitron, Inc. Bonitron, Inc. Nashville, TN An industry leader
A 954 C HD. Technical Description Hydraulic Excavator. Machine for Industrial Applications
 Technical Description Hydraulic Excavator A 95 C HD litronic` Machine for Industrial Applications Operating Weight 165,800 170,0 lb Engine Output 36 hp (0 kw) Technical Data Engine Rating per ISO 99 0
Technical Description Hydraulic Excavator A 95 C HD litronic` Machine for Industrial Applications Operating Weight 165,800 170,0 lb Engine Output 36 hp (0 kw) Technical Data Engine Rating per ISO 99 0
Stability Analysis and Research of Permanent Magnet Synchronous Linear Motor
 Stability Analysis and Research of Permanent Magnet Synchronous Linear Motor Abstract Rudong Du a, Huan Liu b School of Mechanical and Electronic Engineering, Shandong University of Science and Technology,
Stability Analysis and Research of Permanent Magnet Synchronous Linear Motor Abstract Rudong Du a, Huan Liu b School of Mechanical and Electronic Engineering, Shandong University of Science and Technology,
DEVELOPMENT OF DROP WEIGHT IMPACT TEST MACHINE
 CHAPTER-8 DEVELOPMENT OF DROP WEIGHT IMPACT TEST MACHINE 8.1 Introduction The behavior of materials is different when they are subjected to dynamic loading [9]. The testing of materials under dynamic conditions
CHAPTER-8 DEVELOPMENT OF DROP WEIGHT IMPACT TEST MACHINE 8.1 Introduction The behavior of materials is different when they are subjected to dynamic loading [9]. The testing of materials under dynamic conditions
Study of Rupture Directivity in a Foam Rubber Physical Model
 Progress Report Task 1D01 Study of Rupture Directivity in a Foam Rubber Physical Model Rasool Anooshehpoor and James N. Brune University of Nevada, Reno Seismological Laboratory (MS/174) Reno, Nevada 89557-0141
Progress Report Task 1D01 Study of Rupture Directivity in a Foam Rubber Physical Model Rasool Anooshehpoor and James N. Brune University of Nevada, Reno Seismological Laboratory (MS/174) Reno, Nevada 89557-0141
Direct-operated 2/2-way solenoid valves Type EV210B
 Data sheet Direct-operated 2/2-way solenoid valves Type EV20B EV20B covers a wide range of direct-operated 2/2-way solenoid valves for universal use. EV20B is a very robust valve program with high performance
Data sheet Direct-operated 2/2-way solenoid valves Type EV20B EV20B covers a wide range of direct-operated 2/2-way solenoid valves for universal use. EV20B is a very robust valve program with high performance
KNIFE EDGE FLAT ROLLER
 EXPERIMENT N0. 1 To Determine jumping speed of cam Equipment: Cam Analysis Machine Aim: To determine jumping speed of Cam Formulae used: Upward inertial force = Wvω 2 /g Downward force = W + Ks For good
EXPERIMENT N0. 1 To Determine jumping speed of cam Equipment: Cam Analysis Machine Aim: To determine jumping speed of Cam Formulae used: Upward inertial force = Wvω 2 /g Downward force = W + Ks For good
14:1400 (0206) KRAL Volumeter - OMG
 KRAL Volumeter - OMG") 14:1400 (0206) KRAL Volumeter - OMG OMG - Universal OMG The flowmeter for a wide range of applications Operating Conditions and Materials Flow Range: 0.1 to 7,500 l/min Max. Pressure: 250 bar Temperature
14:1400 (0206) KRAL Volumeter - OMG OMG - Universal OMG The flowmeter for a wide range of applications Operating Conditions and Materials Flow Range: 0.1 to 7,500 l/min Max. Pressure: 250 bar Temperature
Increasing of the Stern Tube Bushes Precision by On-Line Adaptive Control of the Cutting Process
 Increasing of the Stern Tube Bushes Precision by On-Line Adaptive Control of the Cutting Process LUCIAN VASILIU, ALEXANDRU EPUREANU, GABRIEL FRUMUŞANU, VASILE MARINESCU Manufacturing Science and Engineering
Increasing of the Stern Tube Bushes Precision by On-Line Adaptive Control of the Cutting Process LUCIAN VASILIU, ALEXANDRU EPUREANU, GABRIEL FRUMUŞANU, VASILE MARINESCU Manufacturing Science and Engineering
1 Fig. 3.1 shows the variation of the magnetic flux linkage with time t for a small generator. magnetic. flux linkage / Wb-turns 1.
 1 Fig. 3.1 shows the variation of the magnetic flux linkage with time t for a small generator. 2 magnetic 1 flux linkage / 0 10 2 Wb-turns 1 2 5 10 15 t / 10 3 s Fig. 3.1 The generator has a flat coil
1 Fig. 3.1 shows the variation of the magnetic flux linkage with time t for a small generator. 2 magnetic 1 flux linkage / 0 10 2 Wb-turns 1 2 5 10 15 t / 10 3 s Fig. 3.1 The generator has a flat coil
Magnetic couplings, stirrer drives for Chemical Reactors bmd and cyclone: Absolutely tight, safe and dependable
 Magnetic couplings, stirrer drives for Chemical Reactors and cyclone: Absolutely tight, safe and dependable Büchi quality Easy maintenance Compact design Well designed Efficient stirring / mixing full
Magnetic couplings, stirrer drives for Chemical Reactors and cyclone: Absolutely tight, safe and dependable Büchi quality Easy maintenance Compact design Well designed Efficient stirring / mixing full
Mechatronic System Case Study: Rotary Inverted Pendulum Dynamic System Investigation
 Mechatronic System Case Study: Rotary Inverted Pendulum Dynamic System Investigation Dr. Kevin Craig Greenheck Chair in Engineering Design & Professor of Mechanical Engineering Marquette University K.
Mechatronic System Case Study: Rotary Inverted Pendulum Dynamic System Investigation Dr. Kevin Craig Greenheck Chair in Engineering Design & Professor of Mechanical Engineering Marquette University K.
STICK SLIP EVALUATION
 3225 Mainway, Burlington, Ontario, L7M 1A6 Canada Tel: +1.905.335.1440 Fax: +1.905.335.4033 www.thordonbearings.com STICK SLIP EVALUATION Self-lubricated Bearing Material Assessment DATE: 18November2015
3225 Mainway, Burlington, Ontario, L7M 1A6 Canada Tel: +1.905.335.1440 Fax: +1.905.335.4033 www.thordonbearings.com STICK SLIP EVALUATION Self-lubricated Bearing Material Assessment DATE: 18November2015
1 High precision, high rigidity positioning table
 TSHM CTHM 11 116 Precision Positioning Table H Ball screw TSH M Ball screw Slide table inear Way Bed inear Points 1 High precision, high rigidity positioning table High precision, high rigidity positioning
TSHM CTHM 11 116 Precision Positioning Table H Ball screw TSH M Ball screw Slide table inear Way Bed inear Points 1 High precision, high rigidity positioning table High precision, high rigidity positioning
Dynamic behavior of a piezowalker, inertial and frictional configurations
 REVIEW OF SCIENTIFIC INSTRUMENTS VOLUME 70, NUMBER 9 SEPTEMBER 1999 Dynamic behavior of a piezowalker, inertial and frictional configurations G. Mariotto, a) M. D Angelo, and I. V. Shvets Physics Department,
REVIEW OF SCIENTIFIC INSTRUMENTS VOLUME 70, NUMBER 9 SEPTEMBER 1999 Dynamic behavior of a piezowalker, inertial and frictional configurations G. Mariotto, a) M. D Angelo, and I. V. Shvets Physics Department,
Design of a High Speed and High Precision 3 DOF Linear Direct Drive
 Design of a High Speed and High Precision 3 DOF Linear Direct Drive Bernhard Sprenger Swiss Federal Institute of Technology Zurich (ETHZ) Institute of Robotics 8092 Zurich, Switzerland Email: sprenger@ifr.mavt.ethz.ch
Design of a High Speed and High Precision 3 DOF Linear Direct Drive Bernhard Sprenger Swiss Federal Institute of Technology Zurich (ETHZ) Institute of Robotics 8092 Zurich, Switzerland Email: sprenger@ifr.mavt.ethz.ch
Lecture 4 Scanning Probe Microscopy (SPM)
") Lecture 4 Scanning Probe Microscopy (SPM) General components of SPM; Tip --- the probe; Cantilever --- the indicator of the tip; Tip-sample interaction --- the feedback system; Scanner --- piezoelectric
Lecture 4 Scanning Probe Microscopy (SPM) General components of SPM; Tip --- the probe; Cantilever --- the indicator of the tip; Tip-sample interaction --- the feedback system; Scanner --- piezoelectric
AC Synchronous Motors
 AC Synchronous Motors A C S Y N C H R O N O U S M O T O R S AC Synchronous Motors Kollmorgen AC synchronous motors are high pole count motors that naturally turn at slower speeds (72 or 60 rpm). at 72
AC Synchronous Motors A C S Y N C H R O N O U S M O T O R S AC Synchronous Motors Kollmorgen AC synchronous motors are high pole count motors that naturally turn at slower speeds (72 or 60 rpm). at 72
Selecting the SureStep Stepping System...C 2
 SELECTING THE SureStep STEPPING SYSTEM APPENDIX C In This Appendix... Selecting the SureStep Stepping System.............C 2 The Selection Procedure..............................C 2 How many pulses from
SELECTING THE SureStep STEPPING SYSTEM APPENDIX C In This Appendix... Selecting the SureStep Stepping System.............C 2 The Selection Procedure..............................C 2 How many pulses from