Statistical Data models, Non-parametrics, Dynamics
|
|
|
- Dustin Charles
- 5 years ago
- Views:
Transcription
1 Statistical Data models, Non-parametrics, Dynamics
2 Non-informative, proper and improper priors For real quantity bounded to interval, standard prior is uniform distribution For real quantity, unbounded, standard is uniform - but with what density? For real quantity on half-open interval, standard prior is f(s)=1/s - but integral diverges! Divergent priors are called improper - they can only be used with convergent likelihoods

3 Dirichlet Distribution- prior for discrete distribution

4 Mean of Dirichlet - Laplaces estimator

5 Occurence table probability

6 Occurence table probability Uniform prior:
7 Non-parametric inference How to perform inference about a distribution without assuming a distribution family? A distribution over reals can be approximated by a piecewise uniform distribution a mixture of real distributions But how many parts? This is non-parametric inference
8 Non-parametric inference Change-points, Rao-Blackwell Given times for events (eg coal-mining disasters) Infer a piecewise constant intensity function (change-point problem) State is set of change-points with intensities inbetween But how many pieces? This is non-parametric inference MCMC: Given current state, propose change in segment bounadry or intensity But it is possible to integrate out intensities proposed
9 Probability ratio in MCMC For a proposed merge of intervals j and j+1, with sizes proportional to (α,1-α), were the counts and obtained by tossing a coin with success probability or not? Compute model probability ratio as in HW1. n j n j +1 " Also, the total number of breakpoints has prior distribution Poisson with parameter (average) ". Probability ratio in favor of split :
10 Averging MCMC run, positions and number of breakpoints
11 Averging MCMC run, positions with uniform test data

12 Mixture of Normals

13 Mixture of Normals elimination of nuisance parameters

14 Mixture of Normals elimination of nuisance parameters (integrate using normalization constant of Gaussian and Gamma distributions)
15 Matlab Mixture of Normals, MCMC (AutoClass method) function [lh,lab,trlpost,trm,trstd,trlab,trct,nbounc]= mmnonu1(x,n,k,labi,nn); %[lh,lab,trlpost,trm,trstd,trlab,trct,nbounc]= % MMNONU1(x,N,k,labi,NN); %inputs % 1D MCMC mixture modelling, % x - 1D data column vector % N - MCMC iterations. % k - number of components %lab,labi - component labelling of data vector) % NN - thinning (optional)
16 Matlab Mixture of Normals, MCMC function [lab,trlh,trm,trstd,trlab,trct,nbounc]= mmnonu1(x,n,k,labi,nn); %[lh,lab,trlpost,trm,trstd,trlab,trct,nbounc]= % MMNONU1(x,N,k,labi,NN); %outputs %trlh - thinned trace of log probability (optional) %trm - thinned trace of means vector (optional) %trstd - thinned vector of standard deviations (optional) %trlab - thinned trace of labels vector (size(x,1) by N/NN (optional) %trct - thinned trace of mixing proportions
17 Matlab Mixture of Normals, MCMC N=10000; NN=100; x=[randn(100,1)-1;randn(100,1)*3;randn(100,1)+1]; % 3 components synthetic data k=2; labi=ceil(rand(size(x))*k); [llhc,lab2,trl,trm,trstd,trlab,trct,nbounc]= mmnonu1(x,n,k,labi,nn); [llhc2,lab2,trl2,trm2,trstd2,trlab2,trct2,nbounc]= mmnonu1(x,n,k,lab2,nn); (k=3, 4, 5)
18 Matlab Mixture of Normals, MCMC The three components and the joint empirical distr
19 Matlab Mixture of Normals, MCMC Putting them together makes the identification seem harder.
20 Matlab Mixture of Normals, MCMC std K=2: mean
21 Matlab Mixture of Normals, MCMC std Burn in progressing K=3: mean
22 Matlab Mixture of Normals, MCMC Burnt in std K=3: mean
23 Matlab Mixture of Normals, MCMC std No focus- No interpretation as 4 clusters K=4: Low prob mean
24 Matlab Mixture of Normals, MCMC std K=5: Low prob mean

 Unsorted sample label trace")
25 Matlab Mixture of Normals, Trace of state labels MCMC X sample: : (-1 1) 101:200: (0 3) 201:300: (1 1) Unsorted sample label trace sorted
26 Mixtures of multivariate normals This works the same way, but instead of a Gamma distribution for the variance we use the Wishart distribution, a matrix-valued distribution over covariance matrices. Competes well with both clustering and Expectation Maximization, which are prone to overfitting (clustering cannot handle overlapping components)
27 Dynamic Systems, time series An abundance of linear prediction models exists For non-linear and Chaotic systems, method was developed in 1990:s (Santa Fe) Gershenfeld, Weigend: The Future of Time Series Online/offline: prediction/retrodiction
28 Hidden Markov Models Given a sequence of discrete signals xi Is there a model likely to have produced xi from a sequence of states si of a Finite Markov Chain? P(. s) - transition probability in state s S(. s) - signal probability in state s Speech Recognition, Bioinformatics,
29 Hidden Markov Models function [Pn,Sn,stn,trP,trS,trst,tll]= hmmsim(a,n,n,s,prop,po,so,sto,nn); %[Pn,Sn,stn,trP,trS,trst]=HMMSIM(A,N,n,s,prop,Po,So,sto,NN); % Compute trace of posterior for hmm parameters % A - the sequence of signals % N - the length of trace % n - number of states in Markov chain % s - number of signal values % prop - proposal stepsize % optional inputs: % Po - starting transition matrix (each of n columns a discrete pdf % in n-vector % So - starting signal matrix (each of n columns a discrete pdf
30 Hidden Markov Models function [Pn,Sn,stn,trP,trS,trst,tll]= hmmsim(a,n,n,s,prop,po,so,sto,nn); % in s-vector % sto - starting state sequence (congruent to vector A) % NN - thining of trace, default 10 % outputs % Pn - last transition matrix in trace % Sn - last signal emission matrix % stn - last hidden state vector (congruent to A) % trp - trace of transition matrices % trs - trace of signal matrices % trace of hidden state vectors
31 Hidden Markov Models
32 Hidden Markov Models
33 Evidence Based Education: EBE Home Page Evidence is often incomplete or equivocal. One of the problems that commonly afflicts politicians is feeling the need to act, or at least to be seen to be acting, despite the absence of any clear evidence about what action is most appropriate. A more mature response in many areas of educational policy would be to acknowledge that we do not really know enough to support a clear decision. Claims that have been enshrined in textbooks are suddenly unprovable. (Truth wears off, Lehrer, 2010)

34 Hidden Markov Models

35 Hidden Markov Models Over iterations, burnin is visible 2 states, 2 signals P-transition matrix S-signaling
36 3 states
37 2 vs 3 states states states x 10 4 Log probability traces
38 MCMC Convergence
39 Kolmogorov-Smirnov test Is sample of n points from distribution? D max of abs difference between empirical and theoretical CDF compute D*sqrt(n), if larger that ca 2, reject Are two samples size n1, n2, from same distribution D max abs difference between the empirical CDF:s, test statistic sqrt(n1*n2/(n1+n2)).
40 Block-wise KS test for 4 MCMC runs red/black=nonreject 100 long 100 short conv 100 X
41

42 Berry and Linoff have eloquently stated their preferences with the often quoted sentence: "Neural networks are a good choice for most classification problems when the results of the model are more important than understanding how the model works". Neural networks typically give the right answer
43 Dynamic Systems and Taken s Theorem Lag vectors (xi,x(i-1), x(i-t), for all i, occupy a submanifold of E^T, if T is large enough This manifold is diffeomorphic to original state space and can be used to create a good dynamic model Taken s theorem assumes no noise and must be empirically verified.

44 Dynamic Systems and Taken s Theorem
45 Santa Fe 1992 Competition Unstable Laser Intensive Care Unit Data, Apnea Exchange rate Data Synthetic series with drift White Dwarf Star Data Bach s unfinished Fugue
46 Stereoscopic 3D view of state space manifold, series A (Laser) The points seem to lie on a surface, which means that a lag-vector of 3 gives good prediction of the time series. The surface is either produced for a training batch, or produced on-the-fly from neighboring data points (possibly downweighing very old points)
47 Figure in book misleading: Origin where surface touches ground
48
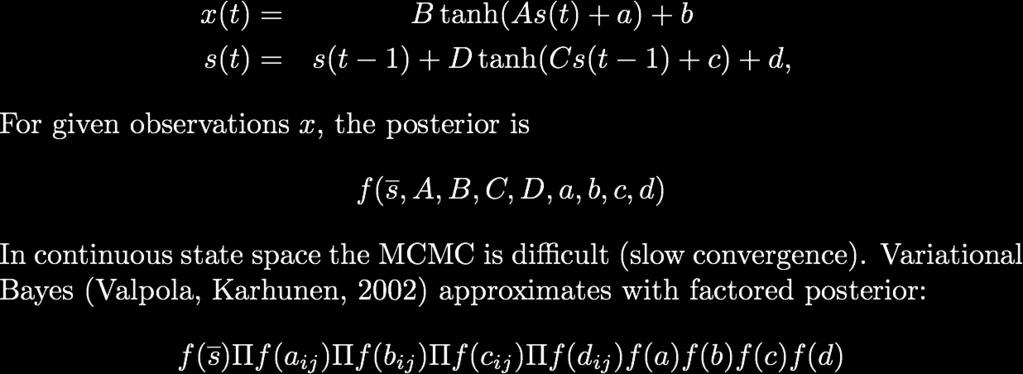
49 Variational Bayes

50 True trajectory in state space (Valpola-Karhunen 2002)
51 Reconstructed trajectory in inferred state space
 \" f (d t! t )# f (! t! t $1 ) f (!")
52 Chapman Kolmogorov version of Bayes rule f (! t D t ) " f (d t! t )# f (! t! t $1 ) f (! t $1 D t $1 )d! t$1
 \" f (d t! t )# f (! t! t $1 ) f (!")
53 Chapman Kolmogorov version of Bayes rule f (! t D t ) " f (d t! t )# f (! t! t $1 ) f (! t $1 D t $1 )d! t$1


54 Observation and video based particle filter tracking Defence: tracking with heterogeneous observations Crowd analysis: tracking from video

55 Cycle in Particle filter Time step cycle Importance (weighted) sample Resampled ordinary sample Diffused sample Weighted by likelihood X- state Z - Observation


56 Particle filter- general tracking
Non-informative, proper and improper priors. Statistical Data models, Non-parametrics, Dynamics. Dirichlet Distributionprior for discrete distribution
 Statistical Data models, Non-parametrics, Dynamics Non-informative, proper and improper priors For real quantity bounded to interval, standard prior is uniform distribution For real quantity, unbounded,
Statistical Data models, Non-parametrics, Dynamics Non-informative, proper and improper priors For real quantity bounded to interval, standard prior is uniform distribution For real quantity, unbounded,
Deciding, Estimating, Computing, Checking
 Deciding, Estimating, Computing, Checking How are Bayesian posteriors used, computed and validated? Fundamentalist Bayes: The posterior is ALL knowledge you have about the state Use in decision making:
Deciding, Estimating, Computing, Checking How are Bayesian posteriors used, computed and validated? Fundamentalist Bayes: The posterior is ALL knowledge you have about the state Use in decision making:
Deciding, Estimating, Computing, Checking. How are Bayesian posteriors used, computed and validated?
 Deciding, Estimating, Computing, Checking How are Bayesian posteriors used, computed and validated? Fundamentalist Bayes: The posterior is ALL knowledge you have about the state Use in decision making:
Deciding, Estimating, Computing, Checking How are Bayesian posteriors used, computed and validated? Fundamentalist Bayes: The posterior is ALL knowledge you have about the state Use in decision making:
Pattern Recognition and Machine Learning
 Christopher M. Bishop Pattern Recognition and Machine Learning ÖSpri inger Contents Preface Mathematical notation Contents vii xi xiii 1 Introduction 1 1.1 Example: Polynomial Curve Fitting 4 1.2 Probability
Christopher M. Bishop Pattern Recognition and Machine Learning ÖSpri inger Contents Preface Mathematical notation Contents vii xi xiii 1 Introduction 1 1.1 Example: Polynomial Curve Fitting 4 1.2 Probability
Recent Advances in Bayesian Inference Techniques
 Recent Advances in Bayesian Inference Techniques Christopher M. Bishop Microsoft Research, Cambridge, U.K. research.microsoft.com/~cmbishop SIAM Conference on Data Mining, April 2004 Abstract Bayesian
Recent Advances in Bayesian Inference Techniques Christopher M. Bishop Microsoft Research, Cambridge, U.K. research.microsoft.com/~cmbishop SIAM Conference on Data Mining, April 2004 Abstract Bayesian
Lecture 9. Time series prediction
 Lecture 9 Time series prediction Prediction is about function fitting To predict we need to model There are a bewildering number of models for data we look at some of the major approaches in this lecture
Lecture 9 Time series prediction Prediction is about function fitting To predict we need to model There are a bewildering number of models for data we look at some of the major approaches in this lecture
PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 2: PROBABILITY DISTRIBUTIONS
 PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 2: PROBABILITY DISTRIBUTIONS Parametric Distributions Basic building blocks: Need to determine given Representation: or? Recall Curve Fitting Binary Variables
PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 2: PROBABILITY DISTRIBUTIONS Parametric Distributions Basic building blocks: Need to determine given Representation: or? Recall Curve Fitting Binary Variables
Brief Introduction of Machine Learning Techniques for Content Analysis
 1 Brief Introduction of Machine Learning Techniques for Content Analysis Wei-Ta Chu 2008/11/20 Outline 2 Overview Gaussian Mixture Model (GMM) Hidden Markov Model (HMM) Support Vector Machine (SVM) Overview
1 Brief Introduction of Machine Learning Techniques for Content Analysis Wei-Ta Chu 2008/11/20 Outline 2 Overview Gaussian Mixture Model (GMM) Hidden Markov Model (HMM) Support Vector Machine (SVM) Overview
PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 13: SEQUENTIAL DATA
 PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 13: SEQUENTIAL DATA Contents in latter part Linear Dynamical Systems What is different from HMM? Kalman filter Its strength and limitation Particle Filter
PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 13: SEQUENTIAL DATA Contents in latter part Linear Dynamical Systems What is different from HMM? Kalman filter Its strength and limitation Particle Filter
Gentle Introduction to Infinite Gaussian Mixture Modeling
 Gentle Introduction to Infinite Gaussian Mixture Modeling with an application in neuroscience By Frank Wood Rasmussen, NIPS 1999 Neuroscience Application: Spike Sorting Important in neuroscience and for
Gentle Introduction to Infinite Gaussian Mixture Modeling with an application in neuroscience By Frank Wood Rasmussen, NIPS 1999 Neuroscience Application: Spike Sorting Important in neuroscience and for
Probability for Statistics and Machine Learning
 ~Springer Anirban DasGupta Probability for Statistics and Machine Learning Fundamentals and Advanced Topics Contents Suggested Courses with Diffe~ent Themes........................... xix 1 Review of Univariate
~Springer Anirban DasGupta Probability for Statistics and Machine Learning Fundamentals and Advanced Topics Contents Suggested Courses with Diffe~ent Themes........................... xix 1 Review of Univariate
Bayesian Regression Linear and Logistic Regression
 When we want more than point estimates Bayesian Regression Linear and Logistic Regression Nicole Beckage Ordinary Least Squares Regression and Lasso Regression return only point estimates But what if we
When we want more than point estimates Bayesian Regression Linear and Logistic Regression Nicole Beckage Ordinary Least Squares Regression and Lasso Regression return only point estimates But what if we
Sparse Gaussian Markov Random Field Mixtures for Anomaly Detection
 Sparse Gaussian Markov Random Field Mixtures for Anomaly Detection Tsuyoshi Idé ( Ide-san ), Ankush Khandelwal*, Jayant Kalagnanam IBM Research, T. J. Watson Research Center (*Currently with University
Sparse Gaussian Markov Random Field Mixtures for Anomaly Detection Tsuyoshi Idé ( Ide-san ), Ankush Khandelwal*, Jayant Kalagnanam IBM Research, T. J. Watson Research Center (*Currently with University
Hidden Markov Models Part 1: Introduction
 Hidden Markov Models Part 1: Introduction CSE 6363 Machine Learning Vassilis Athitsos Computer Science and Engineering Department University of Texas at Arlington 1 Modeling Sequential Data Suppose that
Hidden Markov Models Part 1: Introduction CSE 6363 Machine Learning Vassilis Athitsos Computer Science and Engineering Department University of Texas at Arlington 1 Modeling Sequential Data Suppose that
Bayesian Networks BY: MOHAMAD ALSABBAGH
 Bayesian Networks BY: MOHAMAD ALSABBAGH Outlines Introduction Bayes Rule Bayesian Networks (BN) Representation Size of a Bayesian Network Inference via BN BN Learning Dynamic BN Introduction Conditional
Bayesian Networks BY: MOHAMAD ALSABBAGH Outlines Introduction Bayes Rule Bayesian Networks (BN) Representation Size of a Bayesian Network Inference via BN BN Learning Dynamic BN Introduction Conditional
Bayesian Methods for Machine Learning
 Bayesian Methods for Machine Learning CS 584: Big Data Analytics Material adapted from Radford Neal s tutorial (http://ftp.cs.utoronto.ca/pub/radford/bayes-tut.pdf), Zoubin Ghahramni (http://hunch.net/~coms-4771/zoubin_ghahramani_bayesian_learning.pdf),
Bayesian Methods for Machine Learning CS 584: Big Data Analytics Material adapted from Radford Neal s tutorial (http://ftp.cs.utoronto.ca/pub/radford/bayes-tut.pdf), Zoubin Ghahramni (http://hunch.net/~coms-4771/zoubin_ghahramani_bayesian_learning.pdf),
Gaussian Models
 Gaussian Models ddebarr@uw.edu 2016-04-28 Agenda Introduction Gaussian Discriminant Analysis Inference Linear Gaussian Systems The Wishart Distribution Inferring Parameters Introduction Gaussian Density
Gaussian Models ddebarr@uw.edu 2016-04-28 Agenda Introduction Gaussian Discriminant Analysis Inference Linear Gaussian Systems The Wishart Distribution Inferring Parameters Introduction Gaussian Density
Linear Dynamical Systems
 Linear Dynamical Systems Sargur N. srihari@cedar.buffalo.edu Machine Learning Course: http://www.cedar.buffalo.edu/~srihari/cse574/index.html Two Models Described by Same Graph Latent variables Observations
Linear Dynamical Systems Sargur N. srihari@cedar.buffalo.edu Machine Learning Course: http://www.cedar.buffalo.edu/~srihari/cse574/index.html Two Models Described by Same Graph Latent variables Observations
Bayesian Models in Machine Learning
 Bayesian Models in Machine Learning Lukáš Burget Escuela de Ciencias Informáticas 2017 Buenos Aires, July 24-29 2017 Frequentist vs. Bayesian Frequentist point of view: Probability is the frequency of
Bayesian Models in Machine Learning Lukáš Burget Escuela de Ciencias Informáticas 2017 Buenos Aires, July 24-29 2017 Frequentist vs. Bayesian Frequentist point of view: Probability is the frequency of
Fundamental Probability and Statistics
 Fundamental Probability and Statistics "There are known knowns. These are things we know that we know. There are known unknowns. That is to say, there are things that we know we don't know. But there are
Fundamental Probability and Statistics "There are known knowns. These are things we know that we know. There are known unknowns. That is to say, there are things that we know we don't know. But there are
Lecture 3: Pattern Classification
 EE E6820: Speech & Audio Processing & Recognition Lecture 3: Pattern Classification 1 2 3 4 5 The problem of classification Linear and nonlinear classifiers Probabilistic classification Gaussians, mixtures
EE E6820: Speech & Audio Processing & Recognition Lecture 3: Pattern Classification 1 2 3 4 5 The problem of classification Linear and nonlinear classifiers Probabilistic classification Gaussians, mixtures
Detection ASTR ASTR509 Jasper Wall Fall term. William Sealey Gosset
 ASTR509-14 Detection William Sealey Gosset 1876-1937 Best known for his Student s t-test, devised for handling small samples for quality control in brewing. To many in the statistical world "Student" was
ASTR509-14 Detection William Sealey Gosset 1876-1937 Best known for his Student s t-test, devised for handling small samples for quality control in brewing. To many in the statistical world "Student" was
Bayesian Learning. HT2015: SC4 Statistical Data Mining and Machine Learning. Maximum Likelihood Principle. The Bayesian Learning Framework
 HT5: SC4 Statistical Data Mining and Machine Learning Dino Sejdinovic Department of Statistics Oxford http://www.stats.ox.ac.uk/~sejdinov/sdmml.html Maximum Likelihood Principle A generative model for
HT5: SC4 Statistical Data Mining and Machine Learning Dino Sejdinovic Department of Statistics Oxford http://www.stats.ox.ac.uk/~sejdinov/sdmml.html Maximum Likelihood Principle A generative model for
ICML Scalable Bayesian Inference on Point processes. with Gaussian Processes. Yves-Laurent Kom Samo & Stephen Roberts
 ICML 2015 Scalable Nonparametric Bayesian Inference on Point Processes with Gaussian Processes Machine Learning Research Group and Oxford-Man Institute University of Oxford July 8, 2015 Point Processes
ICML 2015 Scalable Nonparametric Bayesian Inference on Point Processes with Gaussian Processes Machine Learning Research Group and Oxford-Man Institute University of Oxford July 8, 2015 Point Processes
Particle Swarm Optimization of Hidden Markov Models: a comparative study
 Particle Swarm Optimization of Hidden Markov Models: a comparative study D. Novák Department of Cybernetics Czech Technical University in Prague Czech Republic email:xnovakd@labe.felk.cvut.cz M. Macaš,
Particle Swarm Optimization of Hidden Markov Models: a comparative study D. Novák Department of Cybernetics Czech Technical University in Prague Czech Republic email:xnovakd@labe.felk.cvut.cz M. Macaš,
Practical Statistics
 Practical Statistics Lecture 1 (Nov. 9): - Correlation - Hypothesis Testing Lecture 2 (Nov. 16): - Error Estimation - Bayesian Analysis - Rejecting Outliers Lecture 3 (Nov. 18) - Monte Carlo Modeling -
Practical Statistics Lecture 1 (Nov. 9): - Correlation - Hypothesis Testing Lecture 2 (Nov. 16): - Error Estimation - Bayesian Analysis - Rejecting Outliers Lecture 3 (Nov. 18) - Monte Carlo Modeling -
STA 4273H: Statistical Machine Learning
 STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Statistics! rsalakhu@utstat.toronto.edu! http://www.utstat.utoronto.ca/~rsalakhu/ Sidney Smith Hall, Room 6002 Lecture 11 Project
STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Statistics! rsalakhu@utstat.toronto.edu! http://www.utstat.utoronto.ca/~rsalakhu/ Sidney Smith Hall, Room 6002 Lecture 11 Project
Bagging During Markov Chain Monte Carlo for Smoother Predictions
 Bagging During Markov Chain Monte Carlo for Smoother Predictions Herbert K. H. Lee University of California, Santa Cruz Abstract: Making good predictions from noisy data is a challenging problem. Methods
Bagging During Markov Chain Monte Carlo for Smoother Predictions Herbert K. H. Lee University of California, Santa Cruz Abstract: Making good predictions from noisy data is a challenging problem. Methods
COM336: Neural Computing
 COM336: Neural Computing http://www.dcs.shef.ac.uk/ sjr/com336/ Lecture 2: Density Estimation Steve Renals Department of Computer Science University of Sheffield Sheffield S1 4DP UK email: s.renals@dcs.shef.ac.uk
COM336: Neural Computing http://www.dcs.shef.ac.uk/ sjr/com336/ Lecture 2: Density Estimation Steve Renals Department of Computer Science University of Sheffield Sheffield S1 4DP UK email: s.renals@dcs.shef.ac.uk
p L yi z n m x N n xi
 y i z n x n N x i Overview Directed and undirected graphs Conditional independence Exact inference Latent variables and EM Variational inference Books statistical perspective Graphical Models, S. Lauritzen
y i z n x n N x i Overview Directed and undirected graphs Conditional independence Exact inference Latent variables and EM Variational inference Books statistical perspective Graphical Models, S. Lauritzen
Hidden Markov Models. Aarti Singh Slides courtesy: Eric Xing. Machine Learning / Nov 8, 2010
 Hidden Markov Models Aarti Singh Slides courtesy: Eric Xing Machine Learning 10-701/15-781 Nov 8, 2010 i.i.d to sequential data So far we assumed independent, identically distributed data Sequential data
Hidden Markov Models Aarti Singh Slides courtesy: Eric Xing Machine Learning 10-701/15-781 Nov 8, 2010 i.i.d to sequential data So far we assumed independent, identically distributed data Sequential data
Curve Fitting Re-visited, Bishop1.2.5
 Curve Fitting Re-visited, Bishop1.2.5 Maximum Likelihood Bishop 1.2.5 Model Likelihood differentiation p(t x, w, β) = Maximum Likelihood N N ( t n y(x n, w), β 1). (1.61) n=1 As we did in the case of the
Curve Fitting Re-visited, Bishop1.2.5 Maximum Likelihood Bishop 1.2.5 Model Likelihood differentiation p(t x, w, β) = Maximum Likelihood N N ( t n y(x n, w), β 1). (1.61) n=1 As we did in the case of the
Introduction to Machine Learning
 Introduction to Machine Learning Brown University CSCI 1950-F, Spring 2012 Prof. Erik Sudderth Lecture 25: Markov Chain Monte Carlo (MCMC) Course Review and Advanced Topics Many figures courtesy Kevin
Introduction to Machine Learning Brown University CSCI 1950-F, Spring 2012 Prof. Erik Sudderth Lecture 25: Markov Chain Monte Carlo (MCMC) Course Review and Advanced Topics Many figures courtesy Kevin
Computer Vision Group Prof. Daniel Cremers. 3. Regression
 Prof. Daniel Cremers 3. Regression Categories of Learning (Rep.) Learnin g Unsupervise d Learning Clustering, density estimation Supervised Learning learning from a training data set, inference on the
Prof. Daniel Cremers 3. Regression Categories of Learning (Rep.) Learnin g Unsupervise d Learning Clustering, density estimation Supervised Learning learning from a training data set, inference on the
Machine Learning using Bayesian Approaches
 Machine Learning using Bayesian Approaches Sargur N. Srihari University at Buffalo, State University of New York 1 Outline 1. Progress in ML and PR 2. Fully Bayesian Approach 1. Probability theory Bayes
Machine Learning using Bayesian Approaches Sargur N. Srihari University at Buffalo, State University of New York 1 Outline 1. Progress in ML and PR 2. Fully Bayesian Approach 1. Probability theory Bayes
University of Cambridge. MPhil in Computer Speech Text & Internet Technology. Module: Speech Processing II. Lecture 2: Hidden Markov Models I
 University of Cambridge MPhil in Computer Speech Text & Internet Technology Module: Speech Processing II Lecture 2: Hidden Markov Models I o o o o o 1 2 3 4 T 1 b 2 () a 12 2 a 3 a 4 5 34 a 23 b () b ()
University of Cambridge MPhil in Computer Speech Text & Internet Technology Module: Speech Processing II Lecture 2: Hidden Markov Models I o o o o o 1 2 3 4 T 1 b 2 () a 12 2 a 3 a 4 5 34 a 23 b () b ()
ECE521 Lecture 19 HMM cont. Inference in HMM
 ECE521 Lecture 19 HMM cont. Inference in HMM Outline Hidden Markov models Model definitions and notations Inference in HMMs Learning in HMMs 2 Formally, a hidden Markov model defines a generative process
ECE521 Lecture 19 HMM cont. Inference in HMM Outline Hidden Markov models Model definitions and notations Inference in HMMs Learning in HMMs 2 Formally, a hidden Markov model defines a generative process
Robert Collins CSE586, PSU Intro to Sampling Methods
 Intro to Sampling Methods CSE586 Computer Vision II Penn State Univ Topics to be Covered Monte Carlo Integration Sampling and Expected Values Inverse Transform Sampling (CDF) Ancestral Sampling Rejection
Intro to Sampling Methods CSE586 Computer Vision II Penn State Univ Topics to be Covered Monte Carlo Integration Sampling and Expected Values Inverse Transform Sampling (CDF) Ancestral Sampling Rejection
The Bayesian Choice. Christian P. Robert. From Decision-Theoretic Foundations to Computational Implementation. Second Edition.
 Christian P. Robert The Bayesian Choice From Decision-Theoretic Foundations to Computational Implementation Second Edition With 23 Illustrations ^Springer" Contents Preface to the Second Edition Preface
Christian P. Robert The Bayesian Choice From Decision-Theoretic Foundations to Computational Implementation Second Edition With 23 Illustrations ^Springer" Contents Preface to the Second Edition Preface
Parametric Inference Maximum Likelihood Inference Exponential Families Expectation Maximization (EM) Bayesian Inference Statistical Decison Theory
 Bayesian Inference Statistical Decison Theory") Statistical Inference Parametric Inference Maximum Likelihood Inference Exponential Families Expectation Maximization (EM) Bayesian Inference Statistical Decison Theory IP, José Bioucas Dias, IST, 2007
Statistical Inference Parametric Inference Maximum Likelihood Inference Exponential Families Expectation Maximization (EM) Bayesian Inference Statistical Decison Theory IP, José Bioucas Dias, IST, 2007
L11: Pattern recognition principles
 L11: Pattern recognition principles Bayesian decision theory Statistical classifiers Dimensionality reduction Clustering This lecture is partly based on [Huang, Acero and Hon, 2001, ch. 4] Introduction
L11: Pattern recognition principles Bayesian decision theory Statistical classifiers Dimensionality reduction Clustering This lecture is partly based on [Huang, Acero and Hon, 2001, ch. 4] Introduction
Stat 5101 Lecture Notes
 Stat 5101 Lecture Notes Charles J. Geyer Copyright 1998, 1999, 2000, 2001 by Charles J. Geyer May 7, 2001 ii Stat 5101 (Geyer) Course Notes Contents 1 Random Variables and Change of Variables 1 1.1 Random
Stat 5101 Lecture Notes Charles J. Geyer Copyright 1998, 1999, 2000, 2001 by Charles J. Geyer May 7, 2001 ii Stat 5101 (Geyer) Course Notes Contents 1 Random Variables and Change of Variables 1 1.1 Random
Machine Learning Overview
 Machine Learning Overview Sargur N. Srihari University at Buffalo, State University of New York USA 1 Outline 1. What is Machine Learning (ML)? 2. Types of Information Processing Problems Solved 1. Regression
Machine Learning Overview Sargur N. Srihari University at Buffalo, State University of New York USA 1 Outline 1. What is Machine Learning (ML)? 2. Types of Information Processing Problems Solved 1. Regression
Machine learning comes from Bayesian decision theory in statistics. There we want to minimize the expected value of the loss function.
 Bayesian learning: Machine learning comes from Bayesian decision theory in statistics. There we want to minimize the expected value of the loss function. Let y be the true label and y be the predicted
Bayesian learning: Machine learning comes from Bayesian decision theory in statistics. There we want to minimize the expected value of the loss function. Let y be the true label and y be the predicted
Algorithmisches Lernen/Machine Learning
 Algorithmisches Lernen/Machine Learning Part 1: Stefan Wermter Introduction Connectionist Learning (e.g. Neural Networks) Decision-Trees, Genetic Algorithms Part 2: Norman Hendrich Support-Vector Machines
Algorithmisches Lernen/Machine Learning Part 1: Stefan Wermter Introduction Connectionist Learning (e.g. Neural Networks) Decision-Trees, Genetic Algorithms Part 2: Norman Hendrich Support-Vector Machines
Approximate Inference
 Approximate Inference Simulation has a name: sampling Sampling is a hot topic in machine learning, and it s really simple Basic idea: Draw N samples from a sampling distribution S Compute an approximate
Approximate Inference Simulation has a name: sampling Sampling is a hot topic in machine learning, and it s really simple Basic idea: Draw N samples from a sampling distribution S Compute an approximate
Sequential Monte Carlo and Particle Filtering. Frank Wood Gatsby, November 2007
 Sequential Monte Carlo and Particle Filtering Frank Wood Gatsby, November 2007 Importance Sampling Recall: Let s say that we want to compute some expectation (integral) E p [f] = p(x)f(x)dx and we remember
Sequential Monte Carlo and Particle Filtering Frank Wood Gatsby, November 2007 Importance Sampling Recall: Let s say that we want to compute some expectation (integral) E p [f] = p(x)f(x)dx and we remember
STA 414/2104: Machine Learning
 STA 414/2104: Machine Learning Russ Salakhutdinov Department of Computer Science! Department of Statistics! rsalakhu@cs.toronto.edu! http://www.cs.toronto.edu/~rsalakhu/ Lecture 9 Sequential Data So far
STA 414/2104: Machine Learning Russ Salakhutdinov Department of Computer Science! Department of Statistics! rsalakhu@cs.toronto.edu! http://www.cs.toronto.edu/~rsalakhu/ Lecture 9 Sequential Data So far
Non-Parametric Bayes
 Non-Parametric Bayes Mark Schmidt UBC Machine Learning Reading Group January 2016 Current Hot Topics in Machine Learning Bayesian learning includes: Gaussian processes. Approximate inference. Bayesian
Non-Parametric Bayes Mark Schmidt UBC Machine Learning Reading Group January 2016 Current Hot Topics in Machine Learning Bayesian learning includes: Gaussian processes. Approximate inference. Bayesian
Lecture 2. G. Cowan Lectures on Statistical Data Analysis Lecture 2 page 1
 Lecture 2 1 Probability (90 min.) Definition, Bayes theorem, probability densities and their properties, catalogue of pdfs, Monte Carlo 2 Statistical tests (90 min.) general concepts, test statistics,
Lecture 2 1 Probability (90 min.) Definition, Bayes theorem, probability densities and their properties, catalogue of pdfs, Monte Carlo 2 Statistical tests (90 min.) general concepts, test statistics,
ECE521 week 3: 23/26 January 2017
 ECE521 week 3: 23/26 January 2017 Outline Probabilistic interpretation of linear regression - Maximum likelihood estimation (MLE) - Maximum a posteriori (MAP) estimation Bias-variance trade-off Linear
ECE521 week 3: 23/26 January 2017 Outline Probabilistic interpretation of linear regression - Maximum likelihood estimation (MLE) - Maximum a posteriori (MAP) estimation Bias-variance trade-off Linear
STA 4273H: Statistical Machine Learning
 STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Statistics! rsalakhu@utstat.toronto.edu! http://www.utstat.utoronto.ca/~rsalakhu/ Sidney Smith Hall, Room 6002 Lecture 7 Approximate
STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Statistics! rsalakhu@utstat.toronto.edu! http://www.utstat.utoronto.ca/~rsalakhu/ Sidney Smith Hall, Room 6002 Lecture 7 Approximate
Hidden Markov Models. By Parisa Abedi. Slides courtesy: Eric Xing
 Hidden Markov Models By Parisa Abedi Slides courtesy: Eric Xing i.i.d to sequential data So far we assumed independent, identically distributed data Sequential (non i.i.d.) data Time-series data E.g. Speech
Hidden Markov Models By Parisa Abedi Slides courtesy: Eric Xing i.i.d to sequential data So far we assumed independent, identically distributed data Sequential (non i.i.d.) data Time-series data E.g. Speech
p(d θ ) l(θ ) 1.2 x x x
 l(θ ) 1.2 x x x") p(d θ ).2 x 0-7 0.8 x 0-7 0.4 x 0-7 l(θ ) -20-40 -60-80 -00 2 3 4 5 6 7 θ ˆ 2 3 4 5 6 7 θ ˆ 2 3 4 5 6 7 θ θ x FIGURE 3.. The top graph shows several training points in one dimension, known or assumed to
p(d θ ).2 x 0-7 0.8 x 0-7 0.4 x 0-7 l(θ ) -20-40 -60-80 -00 2 3 4 5 6 7 θ ˆ 2 3 4 5 6 7 θ ˆ 2 3 4 5 6 7 θ θ x FIGURE 3.. The top graph shows several training points in one dimension, known or assumed to
Outline. Binomial, Multinomial, Normal, Beta, Dirichlet. Posterior mean, MAP, credible interval, posterior distribution
 Outline A short review on Bayesian analysis. Binomial, Multinomial, Normal, Beta, Dirichlet Posterior mean, MAP, credible interval, posterior distribution Gibbs sampling Revisit the Gaussian mixture model
Outline A short review on Bayesian analysis. Binomial, Multinomial, Normal, Beta, Dirichlet Posterior mean, MAP, credible interval, posterior distribution Gibbs sampling Revisit the Gaussian mixture model
The Bayes classifier
 The Bayes classifier Consider where is a random vector in is a random variable (depending on ) Let be a classifier with probability of error/risk given by The Bayes classifier (denoted ) is the optimal
The Bayes classifier Consider where is a random vector in is a random variable (depending on ) Let be a classifier with probability of error/risk given by The Bayes classifier (denoted ) is the optimal
Contents. Part I: Fundamentals of Bayesian Inference 1
 Contents Preface xiii Part I: Fundamentals of Bayesian Inference 1 1 Probability and inference 3 1.1 The three steps of Bayesian data analysis 3 1.2 General notation for statistical inference 4 1.3 Bayesian
Contents Preface xiii Part I: Fundamentals of Bayesian Inference 1 1 Probability and inference 3 1.1 The three steps of Bayesian data analysis 3 1.2 General notation for statistical inference 4 1.3 Bayesian
Introduction to Machine Learning Midterm, Tues April 8
 Introduction to Machine Learning 10-701 Midterm, Tues April 8 [1 point] Name: Andrew ID: Instructions: You are allowed a (two-sided) sheet of notes. Exam ends at 2:45pm Take a deep breath and don t spend
Introduction to Machine Learning 10-701 Midterm, Tues April 8 [1 point] Name: Andrew ID: Instructions: You are allowed a (two-sided) sheet of notes. Exam ends at 2:45pm Take a deep breath and don t spend
PATTERN RECOGNITION AND MACHINE LEARNING
 PATTERN RECOGNITION AND MACHINE LEARNING Chapter 1. Introduction Shuai Huang April 21, 2014 Outline 1 What is Machine Learning? 2 Curve Fitting 3 Probability Theory 4 Model Selection 5 The curse of dimensionality
PATTERN RECOGNITION AND MACHINE LEARNING Chapter 1. Introduction Shuai Huang April 21, 2014 Outline 1 What is Machine Learning? 2 Curve Fitting 3 Probability Theory 4 Model Selection 5 The curse of dimensionality
Probabilistic Methods in Bioinformatics. Pabitra Mitra
 Probabilistic Methods in Bioinformatics Pabitra Mitra pabitra@cse.iitkgp.ernet.in Probability in Bioinformatics Classification Categorize a new object into a known class Supervised learning/predictive
Probabilistic Methods in Bioinformatics Pabitra Mitra pabitra@cse.iitkgp.ernet.in Probability in Bioinformatics Classification Categorize a new object into a known class Supervised learning/predictive
Classification for High Dimensional Problems Using Bayesian Neural Networks and Dirichlet Diffusion Trees
 Classification for High Dimensional Problems Using Bayesian Neural Networks and Dirichlet Diffusion Trees Rafdord M. Neal and Jianguo Zhang Presented by Jiwen Li Feb 2, 2006 Outline Bayesian view of feature
Classification for High Dimensional Problems Using Bayesian Neural Networks and Dirichlet Diffusion Trees Rafdord M. Neal and Jianguo Zhang Presented by Jiwen Li Feb 2, 2006 Outline Bayesian view of feature
STA414/2104. Lecture 11: Gaussian Processes. Department of Statistics
 STA414/2104 Lecture 11: Gaussian Processes Department of Statistics www.utstat.utoronto.ca Delivered by Mark Ebden with thanks to Russ Salakhutdinov Outline Gaussian Processes Exam review Course evaluations
STA414/2104 Lecture 11: Gaussian Processes Department of Statistics www.utstat.utoronto.ca Delivered by Mark Ebden with thanks to Russ Salakhutdinov Outline Gaussian Processes Exam review Course evaluations
DETECTING PROCESS STATE CHANGES BY NONLINEAR BLIND SOURCE SEPARATION. Alexandre Iline, Harri Valpola and Erkki Oja
 DETECTING PROCESS STATE CHANGES BY NONLINEAR BLIND SOURCE SEPARATION Alexandre Iline, Harri Valpola and Erkki Oja Laboratory of Computer and Information Science Helsinki University of Technology P.O.Box
DETECTING PROCESS STATE CHANGES BY NONLINEAR BLIND SOURCE SEPARATION Alexandre Iline, Harri Valpola and Erkki Oja Laboratory of Computer and Information Science Helsinki University of Technology P.O.Box
STA 4273H: Sta-s-cal Machine Learning
 STA 4273H: Sta-s-cal Machine Learning Russ Salakhutdinov Department of Computer Science! Department of Statistical Sciences! rsalakhu@cs.toronto.edu! h0p://www.cs.utoronto.ca/~rsalakhu/ Lecture 2 In our
STA 4273H: Sta-s-cal Machine Learning Russ Salakhutdinov Department of Computer Science! Department of Statistical Sciences! rsalakhu@cs.toronto.edu! h0p://www.cs.utoronto.ca/~rsalakhu/ Lecture 2 In our
Maximum Likelihood (ML), Expectation Maximization (EM) Pieter Abbeel UC Berkeley EECS
, Expectation Maximization (EM) Pieter Abbeel UC Berkeley EECS") Maximum Likelihood (ML), Expectation Maximization (EM) Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Outline Maximum likelihood (ML) Priors, and
Maximum Likelihood (ML), Expectation Maximization (EM) Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Outline Maximum likelihood (ML) Priors, and
Algorithm-Independent Learning Issues
 Algorithm-Independent Learning Issues Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr CS 551, Spring 2007 c 2007, Selim Aksoy Introduction We have seen many learning
Algorithm-Independent Learning Issues Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr CS 551, Spring 2007 c 2007, Selim Aksoy Introduction We have seen many learning
Stat 451 Lecture Notes Markov Chain Monte Carlo. Ryan Martin UIC
 Stat 451 Lecture Notes 07 12 Markov Chain Monte Carlo Ryan Martin UIC www.math.uic.edu/~rgmartin 1 Based on Chapters 8 9 in Givens & Hoeting, Chapters 25 27 in Lange 2 Updated: April 4, 2016 1 / 42 Outline
Stat 451 Lecture Notes 07 12 Markov Chain Monte Carlo Ryan Martin UIC www.math.uic.edu/~rgmartin 1 Based on Chapters 8 9 in Givens & Hoeting, Chapters 25 27 in Lange 2 Updated: April 4, 2016 1 / 42 Outline
Lecture 3: Pattern Classification. Pattern classification
 EE E68: Speech & Audio Processing & Recognition Lecture 3: Pattern Classification 3 4 5 The problem of classification Linear and nonlinear classifiers Probabilistic classification Gaussians, mitures and
EE E68: Speech & Audio Processing & Recognition Lecture 3: Pattern Classification 3 4 5 The problem of classification Linear and nonlinear classifiers Probabilistic classification Gaussians, mitures and
Probabilistic Graphical Models
 10-708 Probabilistic Graphical Models Homework 3 (v1.1.0) Due Apr 14, 7:00 PM Rules: 1. Homework is due on the due date at 7:00 PM. The homework should be submitted via Gradescope. Solution to each problem
10-708 Probabilistic Graphical Models Homework 3 (v1.1.0) Due Apr 14, 7:00 PM Rules: 1. Homework is due on the due date at 7:00 PM. The homework should be submitted via Gradescope. Solution to each problem
HMM part 1. Dr Philip Jackson
 Centre for Vision Speech & Signal Processing University of Surrey, Guildford GU2 7XH. HMM part 1 Dr Philip Jackson Probability fundamentals Markov models State topology diagrams Hidden Markov models -
Centre for Vision Speech & Signal Processing University of Surrey, Guildford GU2 7XH. HMM part 1 Dr Philip Jackson Probability fundamentals Markov models State topology diagrams Hidden Markov models -
Human Mobility Pattern Prediction Algorithm using Mobile Device Location and Time Data
 Human Mobility Pattern Prediction Algorithm using Mobile Device Location and Time Data 0. Notations Myungjun Choi, Yonghyun Ro, Han Lee N = number of states in the model T = length of observation sequence
Human Mobility Pattern Prediction Algorithm using Mobile Device Location and Time Data 0. Notations Myungjun Choi, Yonghyun Ro, Han Lee N = number of states in the model T = length of observation sequence
PROBABILITY DISTRIBUTIONS. J. Elder CSE 6390/PSYC 6225 Computational Modeling of Visual Perception
 PROBABILITY DISTRIBUTIONS Credits 2 These slides were sourced and/or modified from: Christopher Bishop, Microsoft UK Parametric Distributions 3 Basic building blocks: Need to determine given Representation:
PROBABILITY DISTRIBUTIONS Credits 2 These slides were sourced and/or modified from: Christopher Bishop, Microsoft UK Parametric Distributions 3 Basic building blocks: Need to determine given Representation:
STA 4273H: Statistical Machine Learning
 STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Statistics! rsalakhu@utstat.toronto.edu! http://www.utstat.utoronto.ca/~rsalakhu/ Sidney Smith Hall, Room 6002 Lecture 3 Linear
STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Statistics! rsalakhu@utstat.toronto.edu! http://www.utstat.utoronto.ca/~rsalakhu/ Sidney Smith Hall, Room 6002 Lecture 3 Linear
Sequence Modelling with Features: Linear-Chain Conditional Random Fields. COMP-599 Oct 6, 2015
 Sequence Modelling with Features: Linear-Chain Conditional Random Fields COMP-599 Oct 6, 2015 Announcement A2 is out. Due Oct 20 at 1pm. 2 Outline Hidden Markov models: shortcomings Generative vs. discriminative
Sequence Modelling with Features: Linear-Chain Conditional Random Fields COMP-599 Oct 6, 2015 Announcement A2 is out. Due Oct 20 at 1pm. 2 Outline Hidden Markov models: shortcomings Generative vs. discriminative
9 Multi-Model State Estimation
 Technion Israel Institute of Technology, Department of Electrical Engineering Estimation and Identification in Dynamical Systems (048825) Lecture Notes, Fall 2009, Prof. N. Shimkin 9 Multi-Model State
Technion Israel Institute of Technology, Department of Electrical Engineering Estimation and Identification in Dynamical Systems (048825) Lecture Notes, Fall 2009, Prof. N. Shimkin 9 Multi-Model State
Lecture 4 Discriminant Analysis, k-nearest Neighbors
 Lecture 4 Discriminant Analysis, k-nearest Neighbors Fredrik Lindsten Division of Systems and Control Department of Information Technology Uppsala University. Email: fredrik.lindsten@it.uu.se fredrik.lindsten@it.uu.se
Lecture 4 Discriminant Analysis, k-nearest Neighbors Fredrik Lindsten Division of Systems and Control Department of Information Technology Uppsala University. Email: fredrik.lindsten@it.uu.se fredrik.lindsten@it.uu.se
Hidden Markov Models
 Hidden Markov Models CI/CI(CS) UE, SS 2015 Christian Knoll Signal Processing and Speech Communication Laboratory Graz University of Technology June 23, 2015 CI/CI(CS) SS 2015 June 23, 2015 Slide 1/26 Content
Hidden Markov Models CI/CI(CS) UE, SS 2015 Christian Knoll Signal Processing and Speech Communication Laboratory Graz University of Technology June 23, 2015 CI/CI(CS) SS 2015 June 23, 2015 Slide 1/26 Content
PATTERN CLASSIFICATION
 PATTERN CLASSIFICATION Second Edition Richard O. Duda Peter E. Hart David G. Stork A Wiley-lnterscience Publication JOHN WILEY & SONS, INC. New York Chichester Weinheim Brisbane Singapore Toronto CONTENTS
PATTERN CLASSIFICATION Second Edition Richard O. Duda Peter E. Hart David G. Stork A Wiley-lnterscience Publication JOHN WILEY & SONS, INC. New York Chichester Weinheim Brisbane Singapore Toronto CONTENTS
Bayesian Nonparametric Learning of Complex Dynamical Phenomena
 Duke University Department of Statistical Science Bayesian Nonparametric Learning of Complex Dynamical Phenomena Emily Fox Joint work with Erik Sudderth (Brown University), Michael Jordan (UC Berkeley),
Duke University Department of Statistical Science Bayesian Nonparametric Learning of Complex Dynamical Phenomena Emily Fox Joint work with Erik Sudderth (Brown University), Michael Jordan (UC Berkeley),
Computer Vision Group Prof. Daniel Cremers. 11. Sampling Methods
 Prof. Daniel Cremers 11. Sampling Methods Sampling Methods Sampling Methods are widely used in Computer Science as an approximation of a deterministic algorithm to represent uncertainty without a parametric
Prof. Daniel Cremers 11. Sampling Methods Sampling Methods Sampling Methods are widely used in Computer Science as an approximation of a deterministic algorithm to represent uncertainty without a parametric
Introduction to Machine Learning CMU-10701
 Introduction to Machine Learning CMU-10701 Hidden Markov Models Barnabás Póczos & Aarti Singh Slides courtesy: Eric Xing i.i.d to sequential data So far we assumed independent, identically distributed
Introduction to Machine Learning CMU-10701 Hidden Markov Models Barnabás Póczos & Aarti Singh Slides courtesy: Eric Xing i.i.d to sequential data So far we assumed independent, identically distributed
2D Image Processing (Extended) Kalman and particle filter
 Kalman and particle filter") 2D Image Processing (Extended) Kalman and particle filter Prof. Didier Stricker Dr. Gabriele Bleser Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz
2D Image Processing (Extended) Kalman and particle filter Prof. Didier Stricker Dr. Gabriele Bleser Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz
Performance Comparison of K-Means and Expectation Maximization with Gaussian Mixture Models for Clustering EE6540 Final Project
 Performance Comparison of K-Means and Expectation Maximization with Gaussian Mixture Models for Clustering EE6540 Final Project Devin Cornell & Sushruth Sastry May 2015 1 Abstract In this article, we explore
Performance Comparison of K-Means and Expectation Maximization with Gaussian Mixture Models for Clustering EE6540 Final Project Devin Cornell & Sushruth Sastry May 2015 1 Abstract In this article, we explore
Lecture 5. G. Cowan Lectures on Statistical Data Analysis Lecture 5 page 1
 Lecture 5 1 Probability (90 min.) Definition, Bayes theorem, probability densities and their properties, catalogue of pdfs, Monte Carlo 2 Statistical tests (90 min.) general concepts, test statistics,
Lecture 5 1 Probability (90 min.) Definition, Bayes theorem, probability densities and their properties, catalogue of pdfs, Monte Carlo 2 Statistical tests (90 min.) general concepts, test statistics,
Bayesian time series classification
 Bayesian time series classification Peter Sykacek Department of Engineering Science University of Oxford Oxford, OX 3PJ, UK psyk@robots.ox.ac.uk Stephen Roberts Department of Engineering Science University
Bayesian time series classification Peter Sykacek Department of Engineering Science University of Oxford Oxford, OX 3PJ, UK psyk@robots.ox.ac.uk Stephen Roberts Department of Engineering Science University
Probabilistic modeling. The slides are closely adapted from Subhransu Maji s slides
 Probabilistic modeling The slides are closely adapted from Subhransu Maji s slides Overview So far the models and algorithms you have learned about are relatively disconnected Probabilistic modeling framework
Probabilistic modeling The slides are closely adapted from Subhransu Maji s slides Overview So far the models and algorithms you have learned about are relatively disconnected Probabilistic modeling framework
CPSC 540: Machine Learning
 CPSC 540: Machine Learning MCMC and Non-Parametric Bayes Mark Schmidt University of British Columbia Winter 2016 Admin I went through project proposals: Some of you got a message on Piazza. No news is
CPSC 540: Machine Learning MCMC and Non-Parametric Bayes Mark Schmidt University of British Columbia Winter 2016 Admin I went through project proposals: Some of you got a message on Piazza. No news is
Mathematical Formulation of Our Example
 Mathematical Formulation of Our Example We define two binary random variables: open and, where is light on or light off. Our question is: What is? Computer Vision 1 Combining Evidence Suppose our robot
Mathematical Formulation of Our Example We define two binary random variables: open and, where is light on or light off. Our question is: What is? Computer Vision 1 Combining Evidence Suppose our robot
Probability and Estimation. Alan Moses
 Probability and Estimation Alan Moses Random variables and probability A random variable is like a variable in algebra (e.g., y=e x ), but where at least part of the variability is taken to be stochastic.
Probability and Estimation Alan Moses Random variables and probability A random variable is like a variable in algebra (e.g., y=e x ), but where at least part of the variability is taken to be stochastic.
Hidden Markov Models and Gaussian Mixture Models
 Hidden Markov Models and Gaussian Mixture Models Hiroshi Shimodaira and Steve Renals Automatic Speech Recognition ASR Lectures 4&5 23&27 January 2014 ASR Lectures 4&5 Hidden Markov Models and Gaussian
Hidden Markov Models and Gaussian Mixture Models Hiroshi Shimodaira and Steve Renals Automatic Speech Recognition ASR Lectures 4&5 23&27 January 2014 ASR Lectures 4&5 Hidden Markov Models and Gaussian
Bayesian Networks: Construction, Inference, Learning and Causal Interpretation. Volker Tresp Summer 2016
 Bayesian Networks: Construction, Inference, Learning and Causal Interpretation Volker Tresp Summer 2016 1 Introduction So far we were mostly concerned with supervised learning: we predicted one or several
Bayesian Networks: Construction, Inference, Learning and Causal Interpretation Volker Tresp Summer 2016 1 Introduction So far we were mostly concerned with supervised learning: we predicted one or several
The Particle Filter. PD Dr. Rudolph Triebel Computer Vision Group. Machine Learning for Computer Vision
 The Particle Filter Non-parametric implementation of Bayes filter Represents the belief (posterior) random state samples. by a set of This representation is approximate. Can represent distributions that
The Particle Filter Non-parametric implementation of Bayes filter Represents the belief (posterior) random state samples. by a set of This representation is approximate. Can represent distributions that
Data Analyzing and Daily Activity Learning with Hidden Markov Model
 Data Analyzing and Daily Activity Learning with Hidden Markov Model GuoQing Yin and Dietmar Bruckner Institute of Computer Technology Vienna University of Technology, Austria, Europe {yin, bruckner}@ict.tuwien.ac.at
Data Analyzing and Daily Activity Learning with Hidden Markov Model GuoQing Yin and Dietmar Bruckner Institute of Computer Technology Vienna University of Technology, Austria, Europe {yin, bruckner}@ict.tuwien.ac.at
Parametric Unsupervised Learning Expectation Maximization (EM) Lecture 20.a
 Lecture 20.a") Parametric Unsupervised Learning Expectation Maximization (EM) Lecture 20.a Some slides are due to Christopher Bishop Limitations of K-means Hard assignments of data points to clusters small shift of a
Parametric Unsupervised Learning Expectation Maximization (EM) Lecture 20.a Some slides are due to Christopher Bishop Limitations of K-means Hard assignments of data points to clusters small shift of a
Bayesian Nonparametrics for Speech and Signal Processing
 Bayesian Nonparametrics for Speech and Signal Processing Michael I. Jordan University of California, Berkeley June 28, 2011 Acknowledgments: Emily Fox, Erik Sudderth, Yee Whye Teh, and Romain Thibaux Computer
Bayesian Nonparametrics for Speech and Signal Processing Michael I. Jordan University of California, Berkeley June 28, 2011 Acknowledgments: Emily Fox, Erik Sudderth, Yee Whye Teh, and Romain Thibaux Computer
Lecture 2: From Linear Regression to Kalman Filter and Beyond
 Lecture 2: From Linear Regression to Kalman Filter and Beyond January 18, 2017 Contents 1 Batch and Recursive Estimation 2 Towards Bayesian Filtering 3 Kalman Filter and Bayesian Filtering and Smoothing
Lecture 2: From Linear Regression to Kalman Filter and Beyond January 18, 2017 Contents 1 Batch and Recursive Estimation 2 Towards Bayesian Filtering 3 Kalman Filter and Bayesian Filtering and Smoothing
ECE276A: Sensing & Estimation in Robotics Lecture 10: Gaussian Mixture and Particle Filtering
 ECE276A: Sensing & Estimation in Robotics Lecture 10: Gaussian Mixture and Particle Filtering Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Siwei Guo: s9guo@eng.ucsd.edu Anwesan Pal:
ECE276A: Sensing & Estimation in Robotics Lecture 10: Gaussian Mixture and Particle Filtering Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Siwei Guo: s9guo@eng.ucsd.edu Anwesan Pal:
Modeling and Predicting Chaotic Time Series
 Chapter 14 Modeling and Predicting Chaotic Time Series To understand the behavior of a dynamical system in terms of some meaningful parameters we seek the appropriate mathematical model that captures the
Chapter 14 Modeling and Predicting Chaotic Time Series To understand the behavior of a dynamical system in terms of some meaningful parameters we seek the appropriate mathematical model that captures the
Fast Likelihood-Free Inference via Bayesian Optimization
 Fast Likelihood-Free Inference via Bayesian Optimization Michael Gutmann https://sites.google.com/site/michaelgutmann University of Helsinki Aalto University Helsinki Institute for Information Technology
Fast Likelihood-Free Inference via Bayesian Optimization Michael Gutmann https://sites.google.com/site/michaelgutmann University of Helsinki Aalto University Helsinki Institute for Information Technology
Study Notes on the Latent Dirichlet Allocation
 Study Notes on the Latent Dirichlet Allocation Xugang Ye 1. Model Framework A word is an element of dictionary {1,,}. A document is represented by a sequence of words: =(,, ), {1,,}. A corpus is a collection
Study Notes on the Latent Dirichlet Allocation Xugang Ye 1. Model Framework A word is an element of dictionary {1,,}. A document is represented by a sequence of words: =(,, ), {1,,}. A corpus is a collection