STATICS. Rigid Bodies: Equivalent Systems of Forces VECTOR MECHANICS FOR ENGINEERS: Eighth Edition CHAPTER. Ferdinand P. Beer E. Russell Johnston, Jr.
|
|
|
- Violet Stanley
- 5 years ago
- Views:
Transcription
1 Eighth E CHAPTER VECTOR MECHANICS FOR ENGINEERS: STATICS Ferdinand P. Beer E. Russell Johnston, Jr. Lecture Notes: J. Walt Oler Texas Tech University Rigid Bodies: Equivalent Systems of Forces
2 Contents Introduction External and Internal Forces Principle of Transmissibility: Equivalent Forces Vector Products of Two Vectors Moment of a Force About a Point Varignon s Theorem 3-2
3 Contents Rectangular Components of the Moment of a Force Sample Problem 3.1 Scalar Product of Two Vectors Scalar Product of Two Vectors: Applications Mixed Triple Product of Three Vectors 3-3
4 Contents Moment of a Force About a Given Axis Sample Problem 3.5 Moment of a Couple Ad of Couples Couples Can Be Represented By Vectors Resolution of a Force Into a Force at O and a Couple 3-4
5 Contents Sample Problem 3.6 System of Forces: Reduction to a Force and a Couple Further Reduction of a System of Forces Sample Problem 3.8 Sample Problem
6 Introduction Treatment of a body as a single particle is not always possible. In general, the size of the body and the specific points of application of the forces must be considered. 3-6
7 Introduction Most bodies in elementary mechanics are assumed to be rigid, i.e., the actual deformations are small and do not affect the cons of equilibrium or motion of the body. 3-7
8 Introduction: Objectives Current chapter describes the effect of forces exerted on a rigid body and how to replace a given system of forces with a simpler equivalent system. - moment of a force about a point - moment of a force about an axis - moment due to a couple 3-8
9 Introduction Any system of forces acting on a rigid body can be replaced by an equivalent system consisting of one force acting at a given point and one couple. 3-9
10 External and Internal Forces Forces acting on rigid bodies are divided into two groups: - External forces - Internal forces 3-10
11 External and Internal Forces External forces are shown in a free-body diagram. If unopposed, each external force can impart a motion of translation or rotation, or both. 3-11
12 Principle of Transmissibility: Equivalent Forces Principle of Transmissibility - Cons of equilibrium or motion are not affected by transmitting a force along its line of action. 3-12
13 Principle of Transmissibility: Equivalent Forces NOTE: F and F are equivalent forces. 3-13

14 Principle of Transmissibility: Equivalent Forces Moving the point of application of the force F to the rear bumper does not affect the motion or the other forces acting on the truck. 3-14

15 Principle of Transmissibility: Equivalent Forces Principle of transmissibility may not always apply in determining internal forces and deformations. 3-15
16 Vector classifications: -Fixed or bound vectors have well defined points of application that cannot be changed -Free vectors may be freely moved in space -Sliding vectors may be applied anywhere along their line of action without affecting an analysis. 2-16
17 Moment of a Force About a Point A force vector is defined by its magnitude and direction. Its effect on the rigid body also depends on it point of application. The moment of F about O is defined as M r O F 3-17
18 Moment of a Force About a Point M r O F The moment vector M O is perpendicular to the plane containing O and the force F. 3-18
19 Moment of a Force About a Point Magnitude of M O measures the tendency of the force to cause rotation of the body about an axis along M O. M O rf sinθ Fd The sense of the moment may be determined by the right-hand rule. 3-19

20 3-20

21 3-21
22 A human hand can comfortably apply a torque (torsional moment) of 1.5 Nm. For a bottle lid of diameter 4 cm how much uniformly distributed force (N/m) do we apply do we apply to open the lid? 3-22
 40 N or 4 kg.")
23 Ans : f(2 * 22/7 * 2*2) 150 f3 N/cm. Total force f(2*22/7*2) 40 N or 4 kg. 3-23

24 3-24
25 How much torque in turning the steering wheel of the car? How much torque in tightening the nut of the car wheel? 3-25

26 3-26

27 3-27

28 3-28
29 Varignon s Theorem The moment about a give point O of the resultant of several concurrent forces is equal to the sum of the moments of the various moments about the same r point O. ( ) F F r F r F
30 Varignon s Theorem Varigon s Theorem makes it possible to replace the direct determination of the moment of a force F by the moments of two or more component forces of F. 3-30
31 Rectangular Components of the Moment of a Force The moment of F about O, M O r F, r xi + yj + zk F F x i + F y j + F z k 3-31
32 Rectangular Components of the Moment of a Force M O M x i + M y j + M z k i j k x y z F x F y F z ( yf zf ) i + ( zf xf ) j + ( xf yf )k z y x z y x 3-32
33 ighth 3-33 Rectangular Components of the Moment of a Force The moment of F about B, F r M B A B / ( ) ( ) ( ) k F j F i F F k z z j y y i x x r r r z y x B A B A B A B A B A /
34 ighth 3-34 Rectangular Components of the Moment of a Force ( ) ( ) ( ) z y x B A B A B A B F F F z z y y x x k j i M
35 Moment of a Force About a Point Any force F that has the same magnitude and direction as F, is equivalent if it also has the same line of action and therefore, produces the same moment. 3-35
36 Sample Problem 3.1 A 100-N vertical force is applied to the end of a lever which is attached to a shaft at O. Determine: a)moment about O, 3-36
37 Sample Problem 3.1 b) horizontal force at A which creates the same moment, c) smallest force at A which produces the same moment, 3-37
38 Sample Problem 3.1 d) location for a 240-N vertical force to produce the same moment, a)whether any of the forces from b, c, and d is equivalent to the original force. 3-38
39 Sample Problem 3.1 a) Moment about O is equal to the product of the force and the perpendicular distance between the line of action of the force and O. Since the force tends to rotate the lever clockwise, the moment vector is into the plane of the paper. 3-39
40 Sample Problem 3.1 M O Fd d ( 24m) cos60 12 m M O ( 100 N)( 12 cm) M O 1200 N m 3-40
41 Sample Problem 3.1 c) Horizontal force at A that produces the same moment, M d O 1200 N m ( 24 m) Fd F sin 60 ( 20.8 m) 1200 N m F 20.8 m 20.8 m F 57.7 N 3-41
42 Sample Problem 3.1 c) The smallest force A to produce the same moment occurs when the perpendicular distance is a maximum or when F is M O 1200 N m Fd F ( 24 m) 1200 N m F 24 m perpendicular to OA. F 50 N 3-42
43 Sample Problem 3.1 d) To determine the point of application of a 240 lb force to produce the same moment, M O 1200 N m Fd ( 240 N) d OB d cos N m 240 N 5 cm 5 cm OB 10 m 3-43
44 Sample Problem 3.1 e) Although each of the forces in parts b), c), and d) produces the same moment as the 100 N force, none are of the same magnitude and sense, or on the same line of action. None of the forces is equivalent to the 100 N force. 3-44
45 Mixed Triple Product of Three Vectors Mixed triple product of three vectors, S P Q ( ) scalar result The six mixed triple products formed from S, P, and Q have equal magnitudes but not the same sign, 3-45

46 ighth 3-46 Mixed Triple Product of Three Vectors ( ) ( ) ( ) ( ) z y x z y x z y x x y y x z z x x z y y z z y x Q Q Q P P P S S S Q P Q P S Q P P Q S P Q Q P S Q P S + + Evaluating the mixed triple product,

47 Moment about an axis 3-47

48 3-48
49 Moment of a Force About a Given Axis Moment M O of a force F applied at the point A about a point O, M O r F Scalar moment M OL about an axis OL is the projection of the moment vector M O onto the axis, M OL λ M λ O ( ) r F 3-49
50 Moment of a Force About a Given Axis Moments of F about the coordinate axes, M x yf z zf y M y zf x xf z M z xf y yf x 3-50
51 Moment of a Force About a Given Axis Moment of a force about an arbitrary axis, M r A BL B λ λ r A M A r The result is independent of the point B along the given axis. ( ) r F B B B 3-51
52 Sample Problem 3.4 The rectangular plate is supported by the brackets at A and B and by a wire CD. Knowing that the tension in the wire is 200 N, determine the moment about A of the force exerted by the wire at C. 3-52
53 Sample Problem 3.4 SOLUTION: The moment M A of the force F exerted by the wire is obtained by evaluating the M A r C A F vector product, 3-53
54 Sample Problem 3.4 SOLUTION: r r r 0.3 m i m k C A C A M A r C A F ( ) ( ) 3-54
55 Sample Problem 3.4 F rcd Fλ ( 200 N) rcd ( 0.3 m) i + ( 0.24 m) j ( 0.32 m) k ( 200 N) 0.5 m i + j k ( 120 N) ( 96 N) ( 128 N) 3-55
 i + ( 28.")
56 Sample Problem 3.4 M A i 0.3 j 0 k M A ( 7.68N m) i + ( 28.8N m) j + ( 28.8N m)k 3-56
57 Determine the moment about z-axis due to force at C. M A ( 7.68N m) i + ( 28.8N m) j + ( 28.8N m)k M A. k 28.8 Nm 3-57
58 Sample Problem 3.5 A cube is acted on by a force P as shown. Determine the moment of P a)about A b)about the edge AB and 3-58
determine the perpendicular distance between AG and FC.")
59 Sample Problem 3.5 c)about the diagonal AG of the cube. d)determine the perpendicular distance between AG and FC. 3-59
60 ighth 3-60 Sample Problem 3.5 Moment of P about A, ( ) ( ) ( ) ( ) ( ) j i P j i a M j i P j i P P j i a a j ai r P r M A A F A F A ( )( ) k j i ap M A + + 2
61 Sample Problem 3.5 Moment of P M about AB, AB i i M A ( ap )( 2 i + j + k ) M AB ap
62 Sample Problem 3.5 M M Moment of P about M the diagonal AG, λ M A ra G ai λ r AG A AG A G ap ap 6 ( i + j + k ) ap ( i j k ) ( i + j + k ) ( 1 1 1) aj ak a M AG ( i j k ) ap
63 Sample Problem 3.5 Perpendicular distance between AG and FC, P λ P ( j k ) ( i j k ) ( ) P

64 3-64
65 Moment of a Couple Two forces F and -F having the same magnitude, parallel lines of action, and opposite sense are said to form a couple. 3-65
66 Moment of a Couple Moment of the couple, M M ra F + ( r r ) A r F B r B F rf sinθ Fd ( ) F 3-66

67 Moment of a Couple The moment vector of the couple is independent of the choice of the origin of the coordinate axes, i.e., it is a free vector that can be applied at any point with the same effect. 3-67

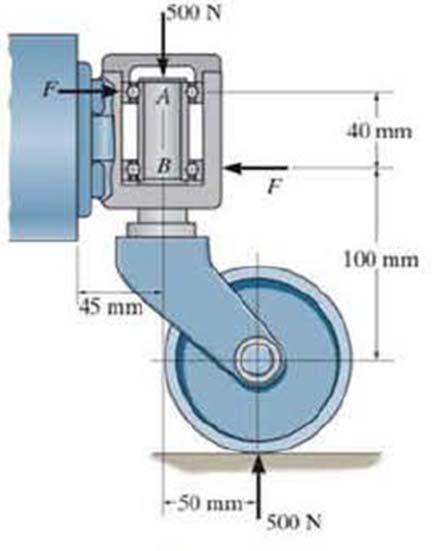
68 Equivalent couples If the wheel was connected to the shaft at a point other than the centre, the wheel would still turn as 12 Nm is a couple and a free vector. 3-68

69 Moment of a Couple Two couples will have equal moments if F d F d the two couples lie in parallel planes, and the two couples have the same sense or the tendency to cause rotation in the same direction. 3-69
70 Ad of Couples Consider two intersecting planes P 1 and P 2 with each containing a couple M M 1 2 r F r F 1 2 in plane in plane P 1 P
71 Ad of Couples Resultants of the vectors also form a couple M r R r ( ) F + F

72 Ad of Couples By Varigon s theorem M r F 1 + r F 2 M 1 + M 2 Sum of two couples is also a couple that is equal to the vector sum of the two couples 3-72
73 Couples Can Be Represented by Vectors Couple vectors may be resolved into component vectors. 3-73
74 Resultant of couples (free vector) 3-74
75 The meshed gears are subjected to the couple moments shown. Determine the magnitude of the resultant couple moment and specify its coordinate direction angles.
76 3-76
77 M k N.m { } M 20cos 20sin 30i 20cos 20cos30 j R + 20sin 20 k N.m 9.397i j k N.m { } M M + M i j k+ 50k N.m { } 9.397i j k N.m { } 3-77
78 M R ( ) ( ) ( ) ( ) ( ) ( ) N.m N.m59.9 N.m α cos 99.0 β cos ν cos 18.3
79 Sample Problem 3.6 Determine the components of the single couple equivalent to the couples shown. 3-79
80 Sample Problem 3.6 Compute the sum of the moments of the four forces about an arbitrary single point. D is a good choice as only the forces at C and E contribute to the moment about D. 3-80
81 Sample Problem
82 Sample Problem 3.6 M M D ( 18 m) j ( 30 N) k [ ( ) ( ) ] 9 m j 12 m k ( 20 N)i + M + ( 180 N m)k ( 540 N m) i + ( 240N m) j 3-82
83 3-83
84 3-84
85 Introduction Any force acting on a rigid body can be replaced by an equivalent system consisting of one force acting at a given point and one couple. 3-85

86 Resolution of a Force Into a Force at O and a Couple Force vector F can not be simply moved to O without modifying its action on the body. 3-86

87 Resolution of a Force Into a Force at O and a Couple The three forces may be replaced by an equivalent force vector and couple vector, i.e, a force-couple system. 3-87

88 Resolution of a Force Into a Force at O and a Couple Attaching equal and opposite force vectors at O produces no net effect on the body. 3-88
89 Resolution of a Force Into a Force at O and a Couple Moving F from A to a different point O 3-89
90 Resolution of a Force Into a Force at O and a Couple Moving F from A to a different point O requires the ad of a different couple vector M O M r O ' F 3-90
91 Resolution of a Force Into a Force at O and a Couple The moments of F about O and O are related, M O ' r ' F M + s O ( r + s ) F F r F + s F 3-91
92 Resolution of a Force Into a Force at O and a Couple Moving the force-couple system from O to O requires the ad of the moment of the force at O about O. 3-92
93 Sample Problem 3.4 The rectangular plate is supported by the brackets at A and B and by a wire CD. Knowing that the tension in the wire is 200 N, determine the equivalent force at A. 3-93
94 F i + j k R M A ( 120 N) ( 96 N) ( 128 N) ( 7.68N m) i + ( 28.8N m) j + ( 28.8N m)k 3-94
95 Equivalent force system at B? F i + j k R ( 120 N) ( 96 N) ( 128 N) M B M A +BA x F R M A +80 k x F R 3-95
96 Introduction Any system of forces acting on a rigid body can be replaced by an equivalent system consisting of one force acting at a given point and one couple. 3-96

97 System of Forces: Reduction to a Force and Couple 3-97

98 System of Forces: Reduction to a Force and Couple A system of forces may be replaced by a collection of force-couple systems acting a given point O 3-98
99 System of Forces: Reduction to a Force and Couple The force and couple vectors may be combined into a resultant force vector and a resultant couple vector, R F R F M O ( r ) 3-99

100 3-100

101 System of Forces: Reduction to a Force and Couple The force-couple system at O may be moved to O with the ad of the moment of R about O, M R O' M R O + s R 3-101
102 System of Forces: Reduction to a Force and Couple Two systems of forces are equivalent if they can be reduced to the same force-couple system

103 3-103
104 Special cases 3-104
105 Further Reduction of a System of Forces If the resultant force and couple at O are mutually perpendicular, they can be replaced by a single force acting along a new line of action
106 Further Reduction of a System of Forces The resultant force-couple system for a system of forces will be mutually perpendicular 1) the forces are concurrent, 2) the forces are coplanar, 3) the forces are parallel

107 Concurrent forces 3-107
108 Further Reduction of a System of Forces System of coplanar forces is reduced to a force-couple system R and R M O that is mutually perpendicular

109 Further Reduction of a System of Forces System can be reduced to a single force by moving the line of action of until its moment about O becomes R R M O 3-109

110 Further Reduction of a System of Forces In terms of rectangular coordinates, xr yr M R y x O x,y coordinates of point of application 3-110

111 Further Reduction of a System of Forces xr y M R O yr x M R O 3-111
112 Sample Problem 3.8 For the beam, reduce the system of forces shown to (a) an equivalent force-couple system at A, (b) an equivalent force couple system at B, and (c) a single force or resultant.note: Since the support reactions are not included, the given system will not maintain the beam in equilibrium
113 Sample Problem 3.8 SOLUTION: a)compute the resultant force for the forces shown and the resultant couple for the moments of the forces about A
114 Sample Problem 3.8 b)find an equivalent force-couple system at B based on the force-couple system at A. c)determine the point of application for the resultant force such that its moment about A is equal to the resultant couple at A
115 Sample Problem 3.8 a)compute the resultant force and the resultant couple at A. R F 150N 600N + 100N ( ) j ( ) j ( ) j ( 250N )j R ( 600 N) j 3-115
116 Vector Mechanics for Engineers: Statics ( r F ) 1.6 i 600 j i i 250 j M R A ( ) ( ) ( ) ( j ) ( ) ( ) ( 1880 N m)k M R A 3-116
117 Sample Problem 3.8 b)find an equivalent force-couple system at B based on the forcecouple system at A
118 Sample Problem 3.8 M R B M R A + r B A R ( 1880N m) k + ( 4.8m ) i ( 600N) ( 1880N m) k + ( 2880N m)k j M R B + ( 1000 N m)k 3-118
119 Sample Problem 3.8 The couple at B is equal to the moment about B of the forcecouple system found at A
120 Sample Problem
121 Resultant of given system of forces is equal to R, and its point of application must be such that the moment of R about A is equal to. R M A 3-121
122 ( 600N ) j ( 1800N.m ) k ( 600N ) k ( 1800N.m )k xi x r R M R A R 600 ( N)j x3.13m 3-122
123 -(600 N )j The resultant of the given system of forces is equal to R, and its point of application must be such that the moment of R about A is equal to. We write A B and conclude that X 3.13 m. Thus, the single force equivalent to the given system is defined as Single Force or Resultant. R 600 N x 3.13 m
124 Sample Problem 3.10 Three cables are attached to the bracket as shown. Replace the forces with an equivalent forcecouple system at A
125 Sample Problem 3.10 SOLUTION: Determine the relative position vectors for the points of application of the cable forces with respect to A
126 Sample Problem 3.10 Resolve the forces into rectangular components. Compute the equivalent force, R F 3-126
127 Sample Problem 3.10 Compute the equivalent couple, M R A ( ) r F 3-127
128 Sample Problem 3.10 SOLUTION: Determine the relative position vectors with respect to A. r r r B C D A A A i k i 0.050k i j ( ) m ( ) m ( m) 3-128
129 Sample Problem 3.10 Resolve the forces into rectangular components. F F B λ B ( 700 N) λ re B 75i 150 j + 50k re B i j k 300i 600 j + 200k ( N) 3-129
130 Sample Problem 3.10 F C ( 1000 N)( cos 45i cos 45 j ) 707i 707k ( N) F D ( 1200 N )( cos 60 i + cos 30 j ) 600 i j ( N ) 3-130
 + ( 600 +")
131 Sample Problem 3.10 Compute the equivalent force, R F ( ) + ( ) + ( )k i j R 1607i + 439j 507k ( N) 3-131
132 Sample Problem 3.10 Compute the equivalent couple, R ( M ) A r F i j k r F i 45k BA B
133 M r B r C r R A A A D A F F F B c D ( r F) i i i j k i 45k j k j j k k M R A 30 i j k 3-133
134 Pauli Effect in Action It was a standing joke among Wolfgang Pauli's colleagues that the famed theoretical physicist should be kept as far away from experimental equipment as humanly possible. His mere presence in a laboratory, it was said, would cause something to go wrong: the power would fail, 3-134
135 Pauli Effect in Action vacuum tubes would suddenly leak, instruments would break or malfunction. Indeed, such was the frequency of Pauli-related incidents that the strange phenomenon came to be known as the 'Pauli Effect'
136 One day, a group of Pauli's mischievous colleagues set up a practical joke to show the strange effect in action: an elaborate contraption was designed and constructed to bring a chandelier crashing down the moment Pauli arrived at a large reception. Pauli duly appeared on schedule and the Pauli effect was demonstrated, though not as the mischievous crew had planned: 3-136
137 no sooner was the mechanism activated than a pulley jammed - and the chandelier did not come down. One day, some important experimental equipment in Professor James Frank's laboratory at the Physics Institute at the University of Gottingen unexpectedly blew up for no apparent reason. Moreover, Pauli, who was on his way to Denmark, had not even entered the building
138 Only later was it discovered that the catastrophe had taken place at the precise moment that the train carrying Pauli from Zurich to Copenhagen had stopped to collect passengers at the Gottingen railroad station 3-138
139 Equivalent force systems: The wrench 3-139
140 3-140
141 3-141
142 ses/en3/notes/statics/staticequiv/ Staticequiv.htm This is a good example on how CG shifts due to use of fuel in aircraft
143 Vector Product of Two Vectors Concept of the moment of a force about a point is more easily understood through applications of the vector product or cross product
144 Vector Product of Two Vectors Vector product of two vectors P and Q is defined as the vector V which satisfies the following cons: 1.Line of action of V is perpendicular to plane containing P and Q
145 Vector Product of Two Vectors 2. Magnitude of V is V PQ sin θ 3. Direction of V is obtained from the righthand rule
146 Vector Products: Rectangular Components i j k V P P P x y z Q Q Q x y z 3-146
147 Moment of a Force About a Point Two-dimensional structures have length and breadth but negligible depth and are subjected to forces contained in the plane of the structure
148 Moment of a Force About a Point The plane of the structure contains the point O and the force F. M O, the moment of the force about O is perpendicular to the plane
149 Moment of a Force About a Point If the force tends to rotate the structure counter clockwise, the sense of the moment vector is out of the plane of the structure and the magnitude of the moment is positive


150 Moment of a Force About a Point If the force tends to rotate the structure clockwise, the sense of the moment vector is into the plane of the structure and the magnitude of the moment is negative
151 Rectangular Components of the Moment of a Force M M O O [( x x ) F ( y y ) F ] M A ( x x B ) F y ( y A y B ) F z A Z B y A B z k 3-151
152 Rectangular Components of the Moment of a Force For twodimensional structures, M O ( ) xf yf y z k M O M Z xf y yf z 3-152
153 Couples Can Be Represented by Vectors A couple can be represented by a vector with magnitude and direction equal to the moment of the couple. Couple vectors obey the law of ad of vectors
STATICS. Equivalent Systems of Forces. Vector Mechanics for Engineers: Statics VECTOR MECHANICS FOR ENGINEERS: Contents & Objectives.
 3 Rigid CHATER VECTOR ECHANICS FOR ENGINEERS: STATICS Ferdinand. Beer E. Russell Johnston, Jr. Lecture Notes: J. Walt Oler Teas Tech Universit Bodies: Equivalent Sstems of Forces Contents & Objectives
3 Rigid CHATER VECTOR ECHANICS FOR ENGINEERS: STATICS Ferdinand. Beer E. Russell Johnston, Jr. Lecture Notes: J. Walt Oler Teas Tech Universit Bodies: Equivalent Sstems of Forces Contents & Objectives
GCE214 Applied Mechanics-Statics. Lecture 04: 27/09/2017
 GCE214 Applied Mechanics-Statics Lecture 04: 27/09/2017 Dr. Ayokunle O. Balogun balogun.ayokunle@lmu.edu.ng Class: Wednesday (3 5 pm) Venue: LT1 Etiquettes and MOP Attendance is a requirement. There may
GCE214 Applied Mechanics-Statics Lecture 04: 27/09/2017 Dr. Ayokunle O. Balogun balogun.ayokunle@lmu.edu.ng Class: Wednesday (3 5 pm) Venue: LT1 Etiquettes and MOP Attendance is a requirement. There may
Chap. 3 Rigid Bodies: Equivalent Systems of Forces. External/Internal Forces; Equivalent Forces
 Chap. 3 Rigid Bodies: Equivalent Systems of Forces Treatment of a body as a single particle is not always possible. In general, the size of the body and the specific points of application of the forces
Chap. 3 Rigid Bodies: Equivalent Systems of Forces Treatment of a body as a single particle is not always possible. In general, the size of the body and the specific points of application of the forces
STATICS. Equivalent Systems of Forces. Vector Mechanics for Engineers: Statics VECTOR MECHANICS FOR ENGINEERS: Contents 9/3/2015.
 3 Rigid CHPTER VECTR ECHNICS R ENGINEERS: STTICS erdinand P. eer E. Russell Johnston, Jr. Lecture Notes: J. Walt ler Teas Tech Universit odies: Equivalent Sstems of orces Contents Introduction Eternal
3 Rigid CHPTER VECTR ECHNICS R ENGINEERS: STTICS erdinand P. eer E. Russell Johnston, Jr. Lecture Notes: J. Walt ler Teas Tech Universit odies: Equivalent Sstems of orces Contents Introduction Eternal
MOMENT OF A FORCE ABOUT A POINT
 MOMENT OF A FORCE ABOUT A POINT The tendency of a body to rotate about an axis passing through a specific point O when acted upon by a force (sometimes called a torque). 1 APPLICATIONS A torque or moment
MOMENT OF A FORCE ABOUT A POINT The tendency of a body to rotate about an axis passing through a specific point O when acted upon by a force (sometimes called a torque). 1 APPLICATIONS A torque or moment
Equivalent Systems of Forces
 Equivalent Systems of orces Contents Introduction( 绪论 ) Vector Products of Two Vectors( 矢量积 ) Moment of a orce About a Point( 力对点的矩 ) Moment of a orce About a Given Axis( 力对轴的矩 ) Moment of a Couple( 力偶矩
Equivalent Systems of orces Contents Introduction( 绪论 ) Vector Products of Two Vectors( 矢量积 ) Moment of a orce About a Point( 力对点的矩 ) Moment of a orce About a Given Axis( 力对轴的矩 ) Moment of a Couple( 力偶矩
STATICS. Bodies VECTOR MECHANICS FOR ENGINEERS: Ninth Edition CHAPTER. Ferdinand P. Beer E. Russell Johnston, Jr.
 N E 4 Equilibrium CHAPTER VECTOR MECHANICS FOR ENGINEERS: STATICS Ferdinand P. Beer E. Russell Johnston, Jr. Lecture Notes: J. Walt Oler Texas Tech University of Rigid Bodies 2010 The McGraw-Hill Companies,
N E 4 Equilibrium CHAPTER VECTOR MECHANICS FOR ENGINEERS: STATICS Ferdinand P. Beer E. Russell Johnston, Jr. Lecture Notes: J. Walt Oler Texas Tech University of Rigid Bodies 2010 The McGraw-Hill Companies,
Equilibrium. Rigid Bodies VECTOR MECHANICS FOR ENGINEERS: STATICS. Eighth Edition CHAPTER. Ferdinand P. Beer E. Russell Johnston, Jr.
 Eighth E 4 Equilibrium CHAPTER VECTOR MECHANICS FOR ENGINEERS: STATICS Ferdinand P. Beer E. Russell Johnston, Jr. Lecture Notes: J. Walt Oler Texas Tech University of Rigid Bodies Contents Introduction
Eighth E 4 Equilibrium CHAPTER VECTOR MECHANICS FOR ENGINEERS: STATICS Ferdinand P. Beer E. Russell Johnston, Jr. Lecture Notes: J. Walt Oler Texas Tech University of Rigid Bodies Contents Introduction
STATICS. Bodies. Vector Mechanics for Engineers: Statics VECTOR MECHANICS FOR ENGINEERS: Design of a support
 4 Equilibrium CHAPTER VECTOR MECHANICS FOR ENGINEERS: STATICS Ferdinand P. Beer E. Russell Johnston, Jr. Lecture Notes: J. Walt Oler Texas Tech University of Rigid Bodies 2010 The McGraw-Hill Companies,
4 Equilibrium CHAPTER VECTOR MECHANICS FOR ENGINEERS: STATICS Ferdinand P. Beer E. Russell Johnston, Jr. Lecture Notes: J. Walt Oler Texas Tech University of Rigid Bodies 2010 The McGraw-Hill Companies,
Force Couple Systems = Reduction of a Force to an Equivalent Force and Moment (Moving a Force to Another Point) acting on a body has two effects:
 acting on a body has two effects:") ESULTANTS orce Couple Systems = eduction of a orce to an Equivalent orce and Moment (Moving a orce to Another Point) The force acting on a body has two effects: the first one is the tendency to push or
ESULTANTS orce Couple Systems = eduction of a orce to an Equivalent orce and Moment (Moving a orce to Another Point) The force acting on a body has two effects: the first one is the tendency to push or
APPLIED MECHANICS I Resultant of Concurrent Forces Consider a body acted upon by co-planar forces as shown in Fig 1.1(a).
.") PPLIED MECHNICS I 1. Introduction to Mechanics Mechanics is a science that describes and predicts the conditions of rest or motion of bodies under the action of forces. It is divided into three parts 1.
PPLIED MECHNICS I 1. Introduction to Mechanics Mechanics is a science that describes and predicts the conditions of rest or motion of bodies under the action of forces. It is divided into three parts 1.
acting on a body has two effects:
 The force acting on a body has two effects: the first one is the tendency to push or pull the body in the direction of the force, and the second one is to rotate the body about any fixed axis which does
The force acting on a body has two effects: the first one is the tendency to push or pull the body in the direction of the force, and the second one is to rotate the body about any fixed axis which does
MECHANICS OF MATERIALS
 2009 The McGraw-Hill Companies, Inc. All rights reserved. Fifth SI Edition CHAPTER 3 MECHANICS OF MATERIALS Ferdinand P. Beer E. Russell Johnston, Jr. John T. DeWolf David F. Mazurek Torsion Lecture Notes:
2009 The McGraw-Hill Companies, Inc. All rights reserved. Fifth SI Edition CHAPTER 3 MECHANICS OF MATERIALS Ferdinand P. Beer E. Russell Johnston, Jr. John T. DeWolf David F. Mazurek Torsion Lecture Notes:
Engineering Mechanics Prof. U. S. Dixit Department of Mechanical Engineering Indian Institute of Technology, Guwahati
 Engineering Mechanics Prof. U. S. Dixit Department of Mechanical Engineering Indian Institute of Technology, Guwahati Module No. - 01 Basics of Statics Lecture No. - 01 Fundamental of Engineering Mechanics
Engineering Mechanics Prof. U. S. Dixit Department of Mechanical Engineering Indian Institute of Technology, Guwahati Module No. - 01 Basics of Statics Lecture No. - 01 Fundamental of Engineering Mechanics
STATICS. Friction VECTOR MECHANICS FOR ENGINEERS: Eighth Edition CHAPTER. Ferdinand P. Beer E. Russell Johnston, Jr.
 Eighth E 8 Friction CHAPTER VECTOR MECHANICS FOR ENGINEERS: STATICS Ferdinand P. Beer E. Russell Johnston, Jr. Lecture Notes: J. Walt Oler Texas Tech University Contents Introduction Laws of Dry Friction.
Eighth E 8 Friction CHAPTER VECTOR MECHANICS FOR ENGINEERS: STATICS Ferdinand P. Beer E. Russell Johnston, Jr. Lecture Notes: J. Walt Oler Texas Tech University Contents Introduction Laws of Dry Friction.
Moment of a force (scalar, vector ) Cross product Principle of Moments Couples Force and Couple Systems Simple Distributed Loading
 Cross product Principle of Moments Couples Force and Couple Systems Simple Distributed Loading") Chapter 4 Moment of a force (scalar, vector ) Cross product Principle of Moments Couples Force and Couple Systems Simple Distributed Loading The moment of a force about a point provides a measure of the
Chapter 4 Moment of a force (scalar, vector ) Cross product Principle of Moments Couples Force and Couple Systems Simple Distributed Loading The moment of a force about a point provides a measure of the
Tenth Edition STATICS 1 Ferdinand P. Beer E. Russell Johnston, Jr. David F. Mazurek Lecture Notes: John Chen California Polytechnic State University
 T E CHAPTER 1 VECTOR MECHANICS FOR ENGINEERS: STATICS Ferdinand P. Beer E. Russell Johnston, Jr. David F. Mazurek Lecture Notes: Introduction John Chen California Polytechnic State University! Contents
T E CHAPTER 1 VECTOR MECHANICS FOR ENGINEERS: STATICS Ferdinand P. Beer E. Russell Johnston, Jr. David F. Mazurek Lecture Notes: Introduction John Chen California Polytechnic State University! Contents
STATICS. Statics of Particles VECTOR MECHANICS FOR ENGINEERS: Eighth Edition CHAPTER. Ferdinand P. Beer E. Russell Johnston, Jr.
 Eighth E CHAPTER VECTOR MECHANICS FOR ENGINEERS: STATICS Ferdinand P. Beer E. Russell Johnston, Jr. Statics of Particles Lecture Notes: J. Walt Oler Teas Tech Universit Contents Introduction Resultant
Eighth E CHAPTER VECTOR MECHANICS FOR ENGINEERS: STATICS Ferdinand P. Beer E. Russell Johnston, Jr. Statics of Particles Lecture Notes: J. Walt Oler Teas Tech Universit Contents Introduction Resultant
Chapter 4 Force System Resultant Moment of a Force
 Chapter 4 Force System Resultant Moment of a Force MOMENT OF A FORCE SCALAR FORMULATION, CROSS PRODUCT, MOMENT OF A FORCE VECTOR FORMULATION, & PRINCIPLE OF MOMENTS Today s Objectives : Students will be
Chapter 4 Force System Resultant Moment of a Force MOMENT OF A FORCE SCALAR FORMULATION, CROSS PRODUCT, MOMENT OF A FORCE VECTOR FORMULATION, & PRINCIPLE OF MOMENTS Today s Objectives : Students will be
Course Overview. Statics (Freshman Fall) Dynamics: x(t)= f(f(t)) displacement as a function of time and applied force
 Dynamics: x(t)= f(f(t)) displacement as a function of time and applied force") Course Overview Statics (Freshman Fall) Engineering Mechanics Dynamics (Freshman Spring) Strength of Materials (Sophomore Fall) Mechanism Kinematics and Dynamics (Sophomore Spring ) Aircraft structures
Course Overview Statics (Freshman Fall) Engineering Mechanics Dynamics (Freshman Spring) Strength of Materials (Sophomore Fall) Mechanism Kinematics and Dynamics (Sophomore Spring ) Aircraft structures
TUTORIAL SHEET 1. magnitude of P and the values of ø and θ. Ans: ø =74 0 and θ= 53 0
 TUTORIAL SHEET 1 1. The rectangular platform is hinged at A and B and supported by a cable which passes over a frictionless hook at E. Knowing that the tension in the cable is 1349N, determine the moment
TUTORIAL SHEET 1 1. The rectangular platform is hinged at A and B and supported by a cable which passes over a frictionless hook at E. Knowing that the tension in the cable is 1349N, determine the moment
Static Equilibrium; Torque
 Static Equilibrium; Torque The Conditions for Equilibrium An object with forces acting on it, but that is not moving, is said to be in equilibrium. The first condition for equilibrium is that the net force
Static Equilibrium; Torque The Conditions for Equilibrium An object with forces acting on it, but that is not moving, is said to be in equilibrium. The first condition for equilibrium is that the net force
ME101 (Division III) webpage
 webpage") ME101 (Division III) webpage Lecture Slides available on http://www.iitg.ernet.in/kd/me101.htm Also available on: http://shilloi.iitg.ernet.in/~kd/me101.htm Equivalent Systems: Resultants Equilibrium Equilibrium
ME101 (Division III) webpage Lecture Slides available on http://www.iitg.ernet.in/kd/me101.htm Also available on: http://shilloi.iitg.ernet.in/~kd/me101.htm Equivalent Systems: Resultants Equilibrium Equilibrium
Chapter Objectives. Copyright 2011 Pearson Education South Asia Pte Ltd
 Chapter Objectives To develop the equations of equilibrium for a rigid body. To introduce the concept of the free-body diagram for a rigid body. To show how to solve rigid-body equilibrium problems using
Chapter Objectives To develop the equations of equilibrium for a rigid body. To introduce the concept of the free-body diagram for a rigid body. To show how to solve rigid-body equilibrium problems using
LOVELY PROFESSIONAL UNIVERSITY BASIC ENGINEERING MECHANICS MCQ TUTORIAL SHEET OF MEC Concurrent forces are those forces whose lines of action
 LOVELY PROFESSIONAL UNIVERSITY BASIC ENGINEERING MECHANICS MCQ TUTORIAL SHEET OF MEC 107 1. Concurrent forces are those forces whose lines of action 1. Meet on the same plane 2. Meet at one point 3. Lie
LOVELY PROFESSIONAL UNIVERSITY BASIC ENGINEERING MECHANICS MCQ TUTORIAL SHEET OF MEC 107 1. Concurrent forces are those forces whose lines of action 1. Meet on the same plane 2. Meet at one point 3. Lie
EQUILIBRIUM OF RIGID BODIES
 EQUILIBRIUM OF RIGID BODIES Equilibrium A body in equilibrium is at rest or can translate with constant velocity F = 0 M = 0 EQUILIBRIUM IN TWO DIMENSIONS Case where the force system acting on a rigid
EQUILIBRIUM OF RIGID BODIES Equilibrium A body in equilibrium is at rest or can translate with constant velocity F = 0 M = 0 EQUILIBRIUM IN TWO DIMENSIONS Case where the force system acting on a rigid
Chapter 12 Static Equilibrium
 Chapter Static Equilibrium. Analysis Model: Rigid Body in Equilibrium. More on the Center of Gravity. Examples of Rigid Objects in Static Equilibrium CHAPTER : STATIC EQUILIBRIUM AND ELASTICITY.) The Conditions
Chapter Static Equilibrium. Analysis Model: Rigid Body in Equilibrium. More on the Center of Gravity. Examples of Rigid Objects in Static Equilibrium CHAPTER : STATIC EQUILIBRIUM AND ELASTICITY.) The Conditions
ARC241 Structural Analysis I Lecture 5, Sections ST4.5 ST4.10
 Lecture 5, Sections ST4.5 ST4.10 ST4.5) Moment of a Force about a Specified Axis ST4.6) Moment of a Couple ST4.7) Equivalent System ST4.8) Resultant of a Force and a Couple System ST4.9) Further Reduction
Lecture 5, Sections ST4.5 ST4.10 ST4.5) Moment of a Force about a Specified Axis ST4.6) Moment of a Couple ST4.7) Equivalent System ST4.8) Resultant of a Force and a Couple System ST4.9) Further Reduction
LOVELY PROFESSIONAL UNIVERSITY BASIC ENGINEERING MECHANICS MCQ TUTORIAL SHEET OF MEC Concurrent forces are those forces whose lines of action
 LOVELY PROFESSIONAL UNIVERSITY BASIC ENGINEERING MECHANICS MCQ TUTORIAL SHEET OF MEC 107 1. Concurrent forces are those forces whose lines of action 1. Meet on the same plane 2. Meet at one point 3. Lie
LOVELY PROFESSIONAL UNIVERSITY BASIC ENGINEERING MECHANICS MCQ TUTORIAL SHEET OF MEC 107 1. Concurrent forces are those forces whose lines of action 1. Meet on the same plane 2. Meet at one point 3. Lie
Torque rotational force which causes a change in rotational motion. This force is defined by linear force multiplied by a radius.
 Warm up A remote-controlled car's wheel accelerates at 22.4 rad/s 2. If the wheel begins with an angular speed of 10.8 rad/s, what is the wheel's angular speed after exactly three full turns? AP Physics
Warm up A remote-controlled car's wheel accelerates at 22.4 rad/s 2. If the wheel begins with an angular speed of 10.8 rad/s, what is the wheel's angular speed after exactly three full turns? AP Physics
MECHANICS OF MATERIALS
 Third E CHAPTER 1 Introduction MECHANICS OF MATERIALS Ferdinand P. Beer E. Russell Johnston, Jr. John T. DeWolf Lecture Notes: J. Walt Oler Texas Tech University Concept of Stress Contents Concept of Stress
Third E CHAPTER 1 Introduction MECHANICS OF MATERIALS Ferdinand P. Beer E. Russell Johnston, Jr. John T. DeWolf Lecture Notes: J. Walt Oler Texas Tech University Concept of Stress Contents Concept of Stress
Chapter 9- Static Equilibrium
 Chapter 9- Static Equilibrium Changes in Office-hours The following changes will take place until the end of the semester Office-hours: - Monday, 12:00-13:00h - Wednesday, 14:00-15:00h - Friday, 13:00-14:00h
Chapter 9- Static Equilibrium Changes in Office-hours The following changes will take place until the end of the semester Office-hours: - Monday, 12:00-13:00h - Wednesday, 14:00-15:00h - Friday, 13:00-14:00h
MECHANICS OF MATERIALS
 GE SI CHAPTER 3 MECHANICS OF MATERIALS Ferdinand P. Beer E. Russell Johnston, Jr. John T. DeWolf David F. Mazurek Torsion Lecture Notes: J. Walt Oler Texas Tech University Torsional Loads on Circular Shafts
GE SI CHAPTER 3 MECHANICS OF MATERIALS Ferdinand P. Beer E. Russell Johnston, Jr. John T. DeWolf David F. Mazurek Torsion Lecture Notes: J. Walt Oler Texas Tech University Torsional Loads on Circular Shafts
ENGR-1100 Introduction to Engineering Analysis. Lecture 13
 ENGR-1100 Introduction to Engineering Analysis Lecture 13 EQUILIBRIUM OF A RIGID BODY & FREE-BODY DIAGRAMS Today s Objectives: Students will be able to: a) Identify support reactions, and, b) Draw a free-body
ENGR-1100 Introduction to Engineering Analysis Lecture 13 EQUILIBRIUM OF A RIGID BODY & FREE-BODY DIAGRAMS Today s Objectives: Students will be able to: a) Identify support reactions, and, b) Draw a free-body
Statics deal with the condition of equilibrium of bodies acted upon by forces.
 Mechanics It is defined as that branch of science, which describes and predicts the conditions of rest or motion of bodies under the action of forces. Engineering mechanics applies the principle of mechanics
Mechanics It is defined as that branch of science, which describes and predicts the conditions of rest or motion of bodies under the action of forces. Engineering mechanics applies the principle of mechanics
Engineering Mechanics: Statics in SI Units, 12e
 Engineering Mechanics: Statics in SI Units, 12e 5 Equilibrium of a Rigid Body Chapter Objectives Develop the equations of equilibrium for a rigid body Concept of the free-body diagram for a rigid body
Engineering Mechanics: Statics in SI Units, 12e 5 Equilibrium of a Rigid Body Chapter Objectives Develop the equations of equilibrium for a rigid body Concept of the free-body diagram for a rigid body
SOLUTION 4 1. If A, B, and D are given vectors, prove the distributive law for the vector cross product, i.e., A : (B + D) = (A : B) + (A : D).
 = (A : B) + (A : D).") 4 1. If A, B, and D are given vectors, prove the distributive law for the vector cross product, i.e., A : (B + D) = (A : B) + (A : D). Consider the three vectors; with A vertical. Note obd is perpendicular
4 1. If A, B, and D are given vectors, prove the distributive law for the vector cross product, i.e., A : (B + D) = (A : B) + (A : D). Consider the three vectors; with A vertical. Note obd is perpendicular
2. Force Systems. 2.1 Introduction. 2.2 Force
 2. Force Systems 2.1 Introduction 2.2 Force - A force is an action of one body on another. - A force is an action which tends to cause acceleration of a body (in dynamics). - A force is a vector quantity.
2. Force Systems 2.1 Introduction 2.2 Force - A force is an action of one body on another. - A force is an action which tends to cause acceleration of a body (in dynamics). - A force is a vector quantity.
PSI AP Physics B Dynamics
 PSI AP Physics B Dynamics Multiple-Choice questions 1. After firing a cannon ball, the cannon moves in the opposite direction from the ball. This an example of: A. Newton s First Law B. Newton s Second
PSI AP Physics B Dynamics Multiple-Choice questions 1. After firing a cannon ball, the cannon moves in the opposite direction from the ball. This an example of: A. Newton s First Law B. Newton s Second
5.2 Rigid Bodies and Two-Dimensional Force Systems
 5.2 Rigid odies and Two-Dimensional Force Systems 5.2 Rigid odies and Two-Dimensional Force Systems Procedures and Strategies, page 1 of 1 Procedures and Strategies for Solving Problems Involving Equilibrium
5.2 Rigid odies and Two-Dimensional Force Systems 5.2 Rigid odies and Two-Dimensional Force Systems Procedures and Strategies, page 1 of 1 Procedures and Strategies for Solving Problems Involving Equilibrium
two forces and moments Structural Math Physics for Structures Structural Math
 RHITETURL STRUTURES: ORM, EHVIOR, ND DESIGN DR. NNE NIHOLS SUMMER 05 lecture two forces and moments orces & Moments rchitectural Structures 009abn Structural Math quantify environmental loads how big is
RHITETURL STRUTURES: ORM, EHVIOR, ND DESIGN DR. NNE NIHOLS SUMMER 05 lecture two forces and moments orces & Moments rchitectural Structures 009abn Structural Math quantify environmental loads how big is
Torque. Physics 6A. Prepared by Vince Zaccone For Campus Learning Assistance Services at UCSB
 Physics 6A Torque is what causes angular acceleration (just like a force causes linear acceleration) Torque is what causes angular acceleration (just like a force causes linear acceleration) For a torque
Physics 6A Torque is what causes angular acceleration (just like a force causes linear acceleration) Torque is what causes angular acceleration (just like a force causes linear acceleration) For a torque
Ishik University / Sulaimani Architecture Department Structure ARCH 214 Chapter -4- Force System Resultant
 Ishik University / Sulaimani Architecture Department 1 Structure ARCH 214 Chapter -4- Force System Resultant 2 1 CHAPTER OBJECTIVES To discuss the concept of the moment of a force and show how to calculate
Ishik University / Sulaimani Architecture Department 1 Structure ARCH 214 Chapter -4- Force System Resultant 2 1 CHAPTER OBJECTIVES To discuss the concept of the moment of a force and show how to calculate
Mechanics: Scalars and Vectors
 Mechanics: Scalars and Vectors Scalar Onl magnitude is associated with it Vector e.g., time, volume, densit, speed, energ, mass etc. Possess direction as well as magnitude Parallelogram law of addition
Mechanics: Scalars and Vectors Scalar Onl magnitude is associated with it Vector e.g., time, volume, densit, speed, energ, mass etc. Possess direction as well as magnitude Parallelogram law of addition
The University of Melbourne Engineering Mechanics
 The University of Melbourne 436-291 Engineering Mechanics Tutorial Eleven Instantaneous Centre and General Motion Part A (Introductory) 1. (Problem 5/93 from Meriam and Kraige - Dynamics) For the instant
The University of Melbourne 436-291 Engineering Mechanics Tutorial Eleven Instantaneous Centre and General Motion Part A (Introductory) 1. (Problem 5/93 from Meriam and Kraige - Dynamics) For the instant
Assignment No. 1 RESULTANT OF COPLANAR FORCES
 Assignment No. 1 RESULTANT OF COPLANAR FORCES Theory Questions: 1) Define force and body. (Dec. 2004 2 Mks) 2) State and explain the law of transmissibility of forces. (May 2009 4 Mks) Or 3) What is law
Assignment No. 1 RESULTANT OF COPLANAR FORCES Theory Questions: 1) Define force and body. (Dec. 2004 2 Mks) 2) State and explain the law of transmissibility of forces. (May 2009 4 Mks) Or 3) What is law
Chapter 9. Rotational Dynamics
 Chapter 9 Rotational Dynamics In pure translational motion, all points on an object travel on parallel paths. The most general motion is a combination of translation and rotation. 1) Torque Produces angular
Chapter 9 Rotational Dynamics In pure translational motion, all points on an object travel on parallel paths. The most general motion is a combination of translation and rotation. 1) Torque Produces angular
Force System Resultants. Engineering Mechanics: Statics
 Force System Resultants Engineering Mechanics: Statics Chapter Objectives To discuss the concept of the moment of a force and show how to calculate it in 2-D and 3-D systems. Definition of the moment of
Force System Resultants Engineering Mechanics: Statics Chapter Objectives To discuss the concept of the moment of a force and show how to calculate it in 2-D and 3-D systems. Definition of the moment of
The case where there is no net effect of the forces acting on a rigid body
 The case where there is no net effect of the forces acting on a rigid body Outline: Introduction and Definition of Equilibrium Equilibrium in Two-Dimensions Special cases Equilibrium in Three-Dimensions
The case where there is no net effect of the forces acting on a rigid body Outline: Introduction and Definition of Equilibrium Equilibrium in Two-Dimensions Special cases Equilibrium in Three-Dimensions
Equilibrium Notes 1 Translational Equilibrium
 Equilibrium Notes 1 Translational Equilibrium Ex. A 20.0 kg object is suspended by a rope as shown. What is the net force acting on it? Ex. Ok that was easy, now that same 20.0 kg object is lifted at a
Equilibrium Notes 1 Translational Equilibrium Ex. A 20.0 kg object is suspended by a rope as shown. What is the net force acting on it? Ex. Ok that was easy, now that same 20.0 kg object is lifted at a
Engineering Mechanics: Statics
 Engineering Mechanics: Statics Chapter 2: Force Systems Part A: Two Dimensional Force Systems Force Force = an action of one body on another Vector quantity External and Internal forces Mechanics of Rigid
Engineering Mechanics: Statics Chapter 2: Force Systems Part A: Two Dimensional Force Systems Force Force = an action of one body on another Vector quantity External and Internal forces Mechanics of Rigid
five moments ELEMENTS OF ARCHITECTURAL STRUCTURES: FORM, BEHAVIOR, AND DESIGN DR. ANNE NICHOLS SPRING 2014 lecture ARCH 614
 ELEMENTS OF ARCHITECTURAL STRUCTURES: FORM, BEHAVIOR, AND DESIGN DR. ANNE NICHOLS SPRING 2014 lecture five moments Moments 1 Moments forces have the tendency to make a body rotate about an axis http://www.physics.umd.edu
ELEMENTS OF ARCHITECTURAL STRUCTURES: FORM, BEHAVIOR, AND DESIGN DR. ANNE NICHOLS SPRING 2014 lecture five moments Moments 1 Moments forces have the tendency to make a body rotate about an axis http://www.physics.umd.edu
KINGS COLLEGE OF ENGINEERING ENGINEERING MECHANICS QUESTION BANK UNIT I - PART-A
 KINGS COLLEGE OF ENGINEERING ENGINEERING MECHANICS QUESTION BANK Sub. Code: CE1151 Sub. Name: Engg. Mechanics UNIT I - PART-A Sem / Year II / I 1.Distinguish the following system of forces with a suitable
KINGS COLLEGE OF ENGINEERING ENGINEERING MECHANICS QUESTION BANK Sub. Code: CE1151 Sub. Name: Engg. Mechanics UNIT I - PART-A Sem / Year II / I 1.Distinguish the following system of forces with a suitable
Unit 1. (a) tan α = (b) tan α = (c) tan α = (d) tan α =
 tan α = (b) tan α = (c) tan α = (d) tan α =") Unit 1 1. The subjects Engineering Mechanics deals with (a) Static (b) kinematics (c) Kinetics (d) All of the above 2. If the resultant of two forces P and Q is acting at an angle α with P, then (a) tan
Unit 1 1. The subjects Engineering Mechanics deals with (a) Static (b) kinematics (c) Kinetics (d) All of the above 2. If the resultant of two forces P and Q is acting at an angle α with P, then (a) tan
MOMENT OF A COUPLE. Today s Objectives: Students will be able to. a) define a couple, and, b) determine the moment of a couple.
 define a couple, and, b) determine the moment of a couple.") Today s Objectives: Students will be able to MOMENT OF A COUPLE a) define a couple, and, b) determine the moment of a couple. In-Class activities: Check Homework Reading Quiz Applications Moment of a Couple
Today s Objectives: Students will be able to MOMENT OF A COUPLE a) define a couple, and, b) determine the moment of a couple. In-Class activities: Check Homework Reading Quiz Applications Moment of a Couple
EQUILIBRIUM OF A RIGID BODY & FREE-BODY DIAGRAMS
 Today s Objectives: Students will be able to: EQUILIBRIUM OF A RIGID BODY & FREE-BODY DIAGRAMS a) Identify support reactions, and, b) Draw a free-body diagram. In-Class Activities: Check Homework Reading
Today s Objectives: Students will be able to: EQUILIBRIUM OF A RIGID BODY & FREE-BODY DIAGRAMS a) Identify support reactions, and, b) Draw a free-body diagram. In-Class Activities: Check Homework Reading
VELAMMAL COLLEGE OF ENGINEERING AND TECHNOLOGY MADURAI DEPARTMRNT OF MECHANICAL ENGINEERING. Subject Code. Mechanics
 VELAMMAL COLLEGE OF ENGINEERING AND TECHNOLOGY MADURAI 625 009 DEPARTMRNT OF MECHANICAL ENGINEERING Year / Sem / Branch I Year / II Sem / CSE Subject Code GE 204 Subject Name Engineering Mechanics Faculty
VELAMMAL COLLEGE OF ENGINEERING AND TECHNOLOGY MADURAI 625 009 DEPARTMRNT OF MECHANICAL ENGINEERING Year / Sem / Branch I Year / II Sem / CSE Subject Code GE 204 Subject Name Engineering Mechanics Faculty
ME 101: Engineering Mechanics
 ME 101: Engineering Mechanics Rajib Kumar Bhattacharjya Department of Civil Engineering Indian Institute of Technology Guwahati M Block : Room No 005 : Tel: 2428 www.iitg.ernet.in/rkbc ME101: Division
ME 101: Engineering Mechanics Rajib Kumar Bhattacharjya Department of Civil Engineering Indian Institute of Technology Guwahati M Block : Room No 005 : Tel: 2428 www.iitg.ernet.in/rkbc ME101: Division
4.0 m s 2. 2 A submarine descends vertically at constant velocity. The three forces acting on the submarine are viscous drag, upthrust and weight.
 1 1 wooden block of mass 0.60 kg is on a rough horizontal surface. force of 12 N is applied to the block and it accelerates at 4.0 m s 2. wooden block 4.0 m s 2 12 N hat is the magnitude of the frictional
1 1 wooden block of mass 0.60 kg is on a rough horizontal surface. force of 12 N is applied to the block and it accelerates at 4.0 m s 2. wooden block 4.0 m s 2 12 N hat is the magnitude of the frictional
MOMENT OF A FORCE SCALAR FORMULATION, CROSS PRODUCT, MOMENT OF A FORCE VECTOR FORMULATION, & PRINCIPLE OF MOMENTS
 MOMENT OF A FORCE SCALAR FORMULATION, CROSS PRODUCT, MOMENT OF A FORCE VECTOR FORMULATION, & PRINCIPLE OF MOMENTS Today s Objectives : Students will be able to: a) understand and define moment, and, b)
MOMENT OF A FORCE SCALAR FORMULATION, CROSS PRODUCT, MOMENT OF A FORCE VECTOR FORMULATION, & PRINCIPLE OF MOMENTS Today s Objectives : Students will be able to: a) understand and define moment, and, b)
Vector Mechanics: Statics
 PDHOnline Course G492 (4 PDH) Vector Mechanics: Statics Mark A. Strain, P.E. 2014 PDH Online PDH Center 5272 Meadow Estates Drive Fairfax, VA 22030-6658 Phone & Fax: 703-988-0088 www.pdhonline.org www.pdhcenter.com
PDHOnline Course G492 (4 PDH) Vector Mechanics: Statics Mark A. Strain, P.E. 2014 PDH Online PDH Center 5272 Meadow Estates Drive Fairfax, VA 22030-6658 Phone & Fax: 703-988-0088 www.pdhonline.org www.pdhcenter.com
Chapter 4. Dynamics: Newton s Laws of Motion. That is, describing why objects move
 Chapter 4 Dynamics: Newton s Laws of Motion That is, describing why objects move orces Newton s 1 st Law Newton s 2 nd Law Newton s 3 rd Law Examples of orces: Weight, Normal orce, Tension, riction ree-body
Chapter 4 Dynamics: Newton s Laws of Motion That is, describing why objects move orces Newton s 1 st Law Newton s 2 nd Law Newton s 3 rd Law Examples of orces: Weight, Normal orce, Tension, riction ree-body
3D Force Couple System and Resultant. Q.No.1: Replace the force system by an equivalent force and couple moment at point A.
 3D Force Couple System and Resultant Q.No.1: Replace the force system by an equivalent force and couple moment at point A. Q.No.2: Handle forces F1 and F2 are applied to the electric drill. Replace this
3D Force Couple System and Resultant Q.No.1: Replace the force system by an equivalent force and couple moment at point A. Q.No.2: Handle forces F1 and F2 are applied to the electric drill. Replace this
When a rigid body is in equilibrium, both the resultant force and the resultant couple must be zero.
 When a rigid body is in equilibrium, both the resultant force and the resultant couple must be zero. 0 0 0 0 k M j M i M M k R j R i R F R z y x z y x Forces and moments acting on a rigid body could be
When a rigid body is in equilibrium, both the resultant force and the resultant couple must be zero. 0 0 0 0 k M j M i M M k R j R i R F R z y x z y x Forces and moments acting on a rigid body could be
VALLIAMMAI ENGINEERING COLLEGE SRM NAGAR, KATTANKULATHUR DEPARTMENT OF MECHANICAL ENGINEERING
 VALLIAMMAI ENGINEERING COLLEGE SRM NAGAR, KATTANKULATHUR 603203 DEPARTMENT OF MECHANICAL ENGINEERING BRANCH: MECHANICAL YEAR / SEMESTER: I / II UNIT 1 PART- A 1. State Newton's three laws of motion? 2.
VALLIAMMAI ENGINEERING COLLEGE SRM NAGAR, KATTANKULATHUR 603203 DEPARTMENT OF MECHANICAL ENGINEERING BRANCH: MECHANICAL YEAR / SEMESTER: I / II UNIT 1 PART- A 1. State Newton's three laws of motion? 2.
Chapter 9. Rotational Dynamics
 Chapter 9 Rotational Dynamics In pure translational motion, all points on an object travel on parallel paths. The most general motion is a combination of translation and rotation. 1) Torque Produces angular
Chapter 9 Rotational Dynamics In pure translational motion, all points on an object travel on parallel paths. The most general motion is a combination of translation and rotation. 1) Torque Produces angular
STATICS. Distributed Forces: Moments of Inertia VECTOR MECHANICS FOR ENGINEERS: Eighth Edition CHAPTER. Ferdinand P. Beer E. Russell Johnston, Jr.
 007 The McGraw-Hill Companies, nc. All rights reserved. Eighth E CHAPTER 9 VECTOR MECHANCS FOR ENGNEERS: STATCS Ferdinand P. Beer E. Russell Johnston, Jr. Lecture Notes: J. Walt Oler Texas Tech University
007 The McGraw-Hill Companies, nc. All rights reserved. Eighth E CHAPTER 9 VECTOR MECHANCS FOR ENGNEERS: STATCS Ferdinand P. Beer E. Russell Johnston, Jr. Lecture Notes: J. Walt Oler Texas Tech University
EQUATIONS OF EQUILIBRIUM & TWO- AND THREE-FORCE MEMEBERS
 EQUATIONS OF EQUILIBRIUM & TWO- AND THREE-FORCE MEMEBERS Today s Objectives: Students will be able to: a) Apply equations of equilibrium to solve for unknowns, and b) Recognize two-force members. In-Class
EQUATIONS OF EQUILIBRIUM & TWO- AND THREE-FORCE MEMEBERS Today s Objectives: Students will be able to: a) Apply equations of equilibrium to solve for unknowns, and b) Recognize two-force members. In-Class
 Subject : Engineering Mechanics Subject Code : 1704 Page No: 1 / 6 ----------------------------- Important Instructions to examiners: 1) The answers should be examined by key words and not as word-to-word
Subject : Engineering Mechanics Subject Code : 1704 Page No: 1 / 6 ----------------------------- Important Instructions to examiners: 1) The answers should be examined by key words and not as word-to-word
TEST REPORT. Question file: P Copyright:
 Date: February-12-16 Time: 2:00:28 PM TEST REPORT Question file: P12-2006 Copyright: Test Date: 21/10/2010 Test Name: EquilibriumPractice Test Form: 0 Test Version: 0 Test Points: 138.00 Test File: EquilibriumPractice
Date: February-12-16 Time: 2:00:28 PM TEST REPORT Question file: P12-2006 Copyright: Test Date: 21/10/2010 Test Name: EquilibriumPractice Test Form: 0 Test Version: 0 Test Points: 138.00 Test File: EquilibriumPractice
Equilibrium of Rigid Bodies
 Equilibrium of Rigid Bodies 1 2 Contents Introduction Free-Bod Diagram Reactions at Supports and Connections for a wo-dimensional Structure Equilibrium of a Rigid Bod in wo Dimensions Staticall Indeterminate
Equilibrium of Rigid Bodies 1 2 Contents Introduction Free-Bod Diagram Reactions at Supports and Connections for a wo-dimensional Structure Equilibrium of a Rigid Bod in wo Dimensions Staticall Indeterminate
Downloaded from
 Question 1.1: What is the force between two small charged spheres having charges of 2 10 7 C and 3 10 7 C placed 30 cm apart in air? Repulsive force of magnitude 6 10 3 N Charge on the first sphere, q
Question 1.1: What is the force between two small charged spheres having charges of 2 10 7 C and 3 10 7 C placed 30 cm apart in air? Repulsive force of magnitude 6 10 3 N Charge on the first sphere, q
Announcements. Equilibrium of a Rigid Body
 Announcements Equilibrium of a Rigid Body Today s Objectives Identify support reactions Draw a free body diagram Class Activities Applications Support reactions Free body diagrams Examples Engr221 Chapter
Announcements Equilibrium of a Rigid Body Today s Objectives Identify support reactions Draw a free body diagram Class Activities Applications Support reactions Free body diagrams Examples Engr221 Chapter
Jurong Junior College 2014 J1 H1 Physics (8866) Tutorial 3: Forces (Solutions)
 Tutorial 3: Forces (Solutions)") Jurong Junior College 2014 J1 H1 Physics (8866) Tutorial 3: Forces (Solutions) Take g = 9.81 m s -2, P atm = 1.0 x 10 5 Pa unless otherwise stated Learning Outcomes (a) Sub-Topic recall and apply Hooke
Jurong Junior College 2014 J1 H1 Physics (8866) Tutorial 3: Forces (Solutions) Take g = 9.81 m s -2, P atm = 1.0 x 10 5 Pa unless otherwise stated Learning Outcomes (a) Sub-Topic recall and apply Hooke
2008 FXA THREE FORCES IN EQUILIBRIUM 1. Candidates should be able to : TRIANGLE OF FORCES RULE
 THREE ORCES IN EQUILIBRIUM 1 Candidates should be able to : TRIANGLE O ORCES RULE Draw and use a triangle of forces to represent the equilibrium of three forces acting at a point in an object. State that
THREE ORCES IN EQUILIBRIUM 1 Candidates should be able to : TRIANGLE O ORCES RULE Draw and use a triangle of forces to represent the equilibrium of three forces acting at a point in an object. State that
Where, m = slope of line = constant c = Intercept on y axis = effort required to start the machine
 (ISO/IEC - 700-005 Certified) Model Answer: Summer 07 Code: 70 Important Instructions to examiners: ) The answers should be examined by key words and not as word-to-word as given in the model answer scheme.
(ISO/IEC - 700-005 Certified) Model Answer: Summer 07 Code: 70 Important Instructions to examiners: ) The answers should be examined by key words and not as word-to-word as given in the model answer scheme.
Engineering Mechanics Statics
 Mechanical Systems Engineering _ 2016 Engineering Mechanics Statics 7. Equilibrium of a Rigid Body Dr. Rami Zakaria Conditions for Rigid-Body Equilibrium Forces on a particle Forces on a rigid body The
Mechanical Systems Engineering _ 2016 Engineering Mechanics Statics 7. Equilibrium of a Rigid Body Dr. Rami Zakaria Conditions for Rigid-Body Equilibrium Forces on a particle Forces on a rigid body The
MECHANICS OF MATERIALS
 CHAPTER MECHANICS OF MATERIALS Ferdinand P. Beer E. Russell Johnston, Jr. John T. DeWolf Lecture Notes: J. Walt Oler Teas Tech Universit Transformations of Stress and Strain 006 The McGraw-Hill Companies,
CHAPTER MECHANICS OF MATERIALS Ferdinand P. Beer E. Russell Johnston, Jr. John T. DeWolf Lecture Notes: J. Walt Oler Teas Tech Universit Transformations of Stress and Strain 006 The McGraw-Hill Companies,
Static Equilibrium. Lecture 24. Chapter 12. Physics I. Department of Physics and Applied Physics
 Lecture 24 Chapter 12 Physics I Static Equilibrium Course website: http://faculty.uml.edu/andriy_danylov/teaching/physicsi IN THIS CHAPTER, you will discuss static equilibrium of an object Today we are
Lecture 24 Chapter 12 Physics I Static Equilibrium Course website: http://faculty.uml.edu/andriy_danylov/teaching/physicsi IN THIS CHAPTER, you will discuss static equilibrium of an object Today we are
MECHANICS OF MATERIALS
 009 The McGraw-Hill Companies, Inc. All rights reserved. Fifth SI Edition CHAPTER 7 MECHANICS OF MATERIALS Ferdinand P. Beer E. Russell Johnston, Jr. John T. DeWolf David F. Mazurek Transformations of
009 The McGraw-Hill Companies, Inc. All rights reserved. Fifth SI Edition CHAPTER 7 MECHANICS OF MATERIALS Ferdinand P. Beer E. Russell Johnston, Jr. John T. DeWolf David F. Mazurek Transformations of
PLANAR RIGID BODY MOTION: TRANSLATION &
 PLANAR RIGID BODY MOTION: TRANSLATION & Today s Objectives : ROTATION Students will be able to: 1. Analyze the kinematics of a rigid body undergoing planar translation or rotation about a fixed axis. In-Class
PLANAR RIGID BODY MOTION: TRANSLATION & Today s Objectives : ROTATION Students will be able to: 1. Analyze the kinematics of a rigid body undergoing planar translation or rotation about a fixed axis. In-Class
Ishik University / Sulaimani Architecture Department. Structure. ARCH 214 Chapter -5- Equilibrium of a Rigid Body
 Ishik University / Sulaimani Architecture Department 1 Structure ARCH 214 Chapter -5- Equilibrium of a Rigid Body CHAPTER OBJECTIVES To develop the equations of equilibrium for a rigid body. To introduce
Ishik University / Sulaimani Architecture Department 1 Structure ARCH 214 Chapter -5- Equilibrium of a Rigid Body CHAPTER OBJECTIVES To develop the equations of equilibrium for a rigid body. To introduce
MECHANICS OF MATERIALS
 00 The McGraw-Hill Companies, Inc. All rights reserved. T Edition CHAPTER MECHANICS OF MATERIALS Ferdinand P. Beer E. Russell Johnston, Jr. John T. DeWolf Lecture Notes: J. Walt Oler Teas Tech Universit
00 The McGraw-Hill Companies, Inc. All rights reserved. T Edition CHAPTER MECHANICS OF MATERIALS Ferdinand P. Beer E. Russell Johnston, Jr. John T. DeWolf Lecture Notes: J. Walt Oler Teas Tech Universit
UNIT - I. Review of the three laws of motion and vector algebra
 UNIT - I Review of the three laws of motion and vector algebra In this course on Engineering Mechanics, we shall be learning about mechanical interaction between bodies. That is we will learn how different
UNIT - I Review of the three laws of motion and vector algebra In this course on Engineering Mechanics, we shall be learning about mechanical interaction between bodies. That is we will learn how different
Rotational Mechanics Part II Torque. Pre AP Physics
 Rotational Mechanics Part II Torque Pre AP Physics We have so far discussed rotational kinematics the description of rotational motion in terms of angle, angular velocity and angular acceleration. Now
Rotational Mechanics Part II Torque Pre AP Physics We have so far discussed rotational kinematics the description of rotational motion in terms of angle, angular velocity and angular acceleration. Now
2-9. The plate is subjected to the forces acting on members A and B as shown. If θ = 60 o, determine the magnitude of the resultant of these forces
 2-9. The plate is subjected to the forces acting on members A and B as shown. If θ 60 o, determine the magnitude of the resultant of these forces and its direction measured clockwise from the positie x
2-9. The plate is subjected to the forces acting on members A and B as shown. If θ 60 o, determine the magnitude of the resultant of these forces and its direction measured clockwise from the positie x
Chapter 2 Statics of Particles. Resultant of Two Forces 8/28/2014. The effects of forces on particles:
 Chapter 2 Statics of Particles The effects of forces on particles: - replacing multiple forces acting on a particle with a single equivalent or resultant force, - relations between forces acting on a particle
Chapter 2 Statics of Particles The effects of forces on particles: - replacing multiple forces acting on a particle with a single equivalent or resultant force, - relations between forces acting on a particle
Plane Motion of Rigid Bodies: Forces and Accelerations
 Plane Motion of Rigid Bodies: Forces and Accelerations Reference: Beer, Ferdinand P. et al, Vector Mechanics for Engineers : Dynamics, 8 th Edition, Mc GrawHill Hibbeler R.C., Engineering Mechanics: Dynamics,
Plane Motion of Rigid Bodies: Forces and Accelerations Reference: Beer, Ferdinand P. et al, Vector Mechanics for Engineers : Dynamics, 8 th Edition, Mc GrawHill Hibbeler R.C., Engineering Mechanics: Dynamics,
HATZIC SECONDARY SCHOOL
 HATZIC SECONDARY SCHOOL PROVINCIAL EXAMINATION ASSIGNMENT STATIC EQUILIBRIUM MULTIPLE CHOICE / 33 OPEN ENDED / 80 TOTAL / 113 NAME: 1. State the condition for translational equilibrium. A. ΣF = 0 B. ΣF
HATZIC SECONDARY SCHOOL PROVINCIAL EXAMINATION ASSIGNMENT STATIC EQUILIBRIUM MULTIPLE CHOICE / 33 OPEN ENDED / 80 TOTAL / 113 NAME: 1. State the condition for translational equilibrium. A. ΣF = 0 B. ΣF
Statics Chapter II Fall 2018 Exercises Corresponding to Sections 2.1, 2.2, and 2.3
 Statics Chapter II Fall 2018 Exercises Corresponding to Sections 2.1, 2.2, and 2.3 2 3 Determine the magnitude of the resultant force FR = F1 + F2 and its direction, measured counterclockwise from the
Statics Chapter II Fall 2018 Exercises Corresponding to Sections 2.1, 2.2, and 2.3 2 3 Determine the magnitude of the resultant force FR = F1 + F2 and its direction, measured counterclockwise from the
3.1 CONDITIONS FOR RIGID-BODY EQUILIBRIUM
 3.1 CONDITIONS FOR RIGID-BODY EQUILIBRIUM Consider rigid body fixed in the x, y and z reference and is either at rest or moves with reference at constant velocity Two types of forces that act on it, the
3.1 CONDITIONS FOR RIGID-BODY EQUILIBRIUM Consider rigid body fixed in the x, y and z reference and is either at rest or moves with reference at constant velocity Two types of forces that act on it, the
Al-Saudia Virtual Academy Pakistan Online Tuition Online Tutor Pakistan
 Al-Saudia Virtual Academy Pakistan Online Tuition Online Tutor Pakistan Statics What do you mean by Resultant Force? Ans: Resultant Force: The sum of all forces acting upon a body is called Resultant Force.
Al-Saudia Virtual Academy Pakistan Online Tuition Online Tutor Pakistan Statics What do you mean by Resultant Force? Ans: Resultant Force: The sum of all forces acting upon a body is called Resultant Force.
Engineering Mechanics: Statics in SI Units, 12e Force Vectors
 Engineering Mechanics: Statics in SI Units, 1e orce Vectors 1 Chapter Objectives Parallelogram Law Cartesian vector form Dot product and angle between vectors Chapter Outline 1. Scalars and Vectors. Vector
Engineering Mechanics: Statics in SI Units, 1e orce Vectors 1 Chapter Objectives Parallelogram Law Cartesian vector form Dot product and angle between vectors Chapter Outline 1. Scalars and Vectors. Vector
Engineering Mechanics Objective module 1 with solutions: A K GAIKAR
 Engineering Mechanics Objective module 1 with solutions: A K GAIKAR 1. What is the branch of engineering mechanics which refers to the study of stationary rigid body? A. Statics B. Kinetics C. Kinematics
Engineering Mechanics Objective module 1 with solutions: A K GAIKAR 1. What is the branch of engineering mechanics which refers to the study of stationary rigid body? A. Statics B. Kinetics C. Kinematics
Equilibrium Notes 1 Translational Equilibrium
 Equilibrium Notes 1 Translational Equilibrium A 20.0 kg object is suspended by a rope as shown. What is the net force acting on it? Ok that was easy, now that same 20.0 kg object is lifted at a velocity
Equilibrium Notes 1 Translational Equilibrium A 20.0 kg object is suspended by a rope as shown. What is the net force acting on it? Ok that was easy, now that same 20.0 kg object is lifted at a velocity
Torque and Static Equilibrium
 Torque and Static Equilibrium Rigid Bodies Rigid body: An extended object in which the distance between any two points in the object is constant in time. Examples: sphere, disk Effect of external forces
Torque and Static Equilibrium Rigid Bodies Rigid body: An extended object in which the distance between any two points in the object is constant in time. Examples: sphere, disk Effect of external forces
PROBLEMS on FORCE SYSTEMS
 on FORCE SYSTEMS 1. The guy cables AB and AC are attached to the top of the transmission tower. The tension in cable AB is 8 kn. Determine the required tension T in cable AC such that the net effect of
on FORCE SYSTEMS 1. The guy cables AB and AC are attached to the top of the transmission tower. The tension in cable AB is 8 kn. Determine the required tension T in cable AC such that the net effect of
Chapter 4. Forces and Newton s Laws of Motion. continued
 Chapter 4 Forces and Newton s Laws of Motion continued 4.9 Static and Kinetic Frictional Forces When an object is in contact with a surface forces can act on the objects. The component of this force acting
Chapter 4 Forces and Newton s Laws of Motion continued 4.9 Static and Kinetic Frictional Forces When an object is in contact with a surface forces can act on the objects. The component of this force acting
P12 Torque Notes.notebook. March 26, Torques
 Torques The size of a torque depends on two things: 1. The size of the force being applied (a larger force will have a greater effect) 2. The distance away from the pivot point (the further away from this
Torques The size of a torque depends on two things: 1. The size of the force being applied (a larger force will have a greater effect) 2. The distance away from the pivot point (the further away from this
2016 ENGINEERING MECHANICS
 Set No 1 I B. Tech I Semester Regular Examinations, Dec 2016 ENGINEERING MECHANICS (Com. to AE, AME, BOT, CHEM, CE, EEE, ME, MTE, MM, PCE, PE) Time: 3 hours Max. Marks: 70 Question Paper Consists of Part-A
Set No 1 I B. Tech I Semester Regular Examinations, Dec 2016 ENGINEERING MECHANICS (Com. to AE, AME, BOT, CHEM, CE, EEE, ME, MTE, MM, PCE, PE) Time: 3 hours Max. Marks: 70 Question Paper Consists of Part-A