Chapter 12 Static Equilibrium
|
|
|
- Rolf Gray
- 5 years ago
- Views:
Transcription
1 Chapter Static Equilibrium. Analysis Model: Rigid Body in Equilibrium. More on the Center of Gravity. Examples of Rigid Objects in Static Equilibrium
2 CHAPTER : STATIC EQUILIBRIUM AND ELASTICITY.) The Conditions For Equilibrium Object treated as a particle One necessary condition for equilibrium = the net force acting on an object is zero. For extended object The net force acting on an object is zero. Involves the net torque acting on the extended object. Equilibrium does not require the absence of motion. A rotating object can have constant angular velocity and still be in equilibrium. Consider a single force F acting on a rigid object (Figure (.)). The effect of the force depends on its point of application P. If r is the position vector of this point relative to O, the torque assiciated with the force F about O is given by Equation (.7) : τ rf
3 From vector product (Section (.)) the vector is perpendicular to the plane formed by r and F. Right-hand rule to determine the direction of : Curl the fingers of your right hand in the direction of rotation that F tends to cause about an axis through O, your thumb then points in the direction of. In Figure (.) - is directed toward out of the page. From Figure (.) the tendency of F to rotate the object about an axis through O depends on the moment arm d and the magnitude of F. Magnitude of = Fd (Eq. (0.9). Suppose a rigid object is acted on first by force F and later by force F. If the two forces have the same magnitude they will produce the same effect on the object only if they have the same direction and the same line of action. Equivalent forces = two forces F and F are equivalent if and only if F = F and if and only if the two produce the same torque about any axis.
4 Figure (.) two forces are equal in magnitude and opposite in direction = not equivalent. F Figure (.) F O The force directed to the right tends to rotate the object clockwise about an axis perpendicular to the diagram through O. The force dircted to the left tends to rotate it counterclockwise about that axis. Figure (.) an object is pivoted about an axis through its center of mass. Two forces of equal magnitude act in opposite directions along parallel lines of action. A pair of forces acting in this manner = couple Because each force produces the same torque Fd, the net torque has a magnitude of Fd.
5 The object rotates clockwise and undergoes an angular acceleration about the axis = nonequilibrium situation (with respect to rotational motion). The net torque on the object gives rise to an angular acceleration according to the relationship = Fd = I (Eq. (0.)). An object is in rotational equilibrium only if its angular acceleration = 0. Because = I for rotation about a fixed axis, the net torque about any axis must be zero. Two necessary conditions for equilibrium of an object :. The resultant external force must equal zero. F = 0 (.) Translational equilibrium tells us that the linear acceleration of the center of mass of the object must be zero when viewed from an inertial reference frame.. The resultant external torque about any axis must be zero. = 0 (.) Rotational equilibrium and tells us that the angular acceleration about any axis must be zero.. Special case of static equilibrium the object is at rest and so has no linear or angular speed (that is, v CM = 0 and = 0).
6 From equation (.) and (.) equivalent to six scalar equations (F x, F y, F z, x, y, z ). Restrict to situations in which all the forces lie in the xy plane. Forces whose vector representations are in the same plane are said to be coplanar. Deal with only three scalar equations. Two of these come from balancing the forces in the x and y direction (F x, F y ). The third comes from the torque equation the net torque about any point in the xy plane must be zero. Hence, the two conditions of equilibrium provde the equations : F x = 0 F y = 0 z = 0 (.) where the axis of the torque equation is arbitrary. Regardless of the number of forces that are acting if an object is in translational equilibrium and if the net torque is zero about one axis, then the net torque must also be zero about any other axis. The point can be inside or outside the boundaries of the object.
7 Consider an object being acted on by several forces such that the resultant force F = F + F + F + = 0. Figure (.4) four forces acted on the object. F F O r r O r r Figure (.4) F F 4 The point of application of F relative to O is specified by the position vector r. Similarly, the points of application of F, F, are specified by r, r,. The net torque about an axis through O is : τ O r F r F r F...
8 Now consider another arbitrary point O having a posiiton vector r relative to O. The point of application of F relative to O is identified by the vector r r. The point of application of F relative to O is r r, and so forth. Therefore, the torque about an axis through O is : τ O' ( r r r') F F r ( r F r r') F F ( r... r' ( F r') F F... F...) Because the net force is assumed to be zero (given that the object is in translational equilibrium), the last term vanishes, and we see that the torque about O is equal to the torque about O. Hence, if an object is in translational equilibrium and the net torque is zero about one point, then the net torque must be zero about any other point.
9 .) More on the Center of Gravity Whenever deal with a rigid object consider () the force of gravity acting on it, and () the point of application of this force. On every object is a special point = center of gravity. All the various gravitational forces acting on all the various mass elements of the object are equivalent to a single gravitational force acting through this point. To compute the torque due to the gravitational force on an object of mass M consider the force Mg acting at the center of gravity of the object. To find this special point (center of gravity) If we assume that g is uniform over the object the center of gravity of the object coincides with its center of mass. Consider an object of arbitrary shape lying in the xy plane (Figure (.5)). Suppose the object is divided into a large number of particles of masses m, m, m, having coordinates (x, y ), (x, y ), (x, y ),. In Equation (9.8) the x coordinate of the center of mass of such an object : x CM mx mx m m mx... m m... m Similar form of equation to define the y coordinate of the center of mass. n n x n mix i m i i i
10 Figure (.6) consider the force of gravity exerted on each particle. Each particle contributes a torque about the origin equal in magnitude to the particle s weight mg multiplied by its moment arm. Example the torque due to the force m g is m g x, where g is the magnitude of the gravitational field at the position of the particle of mass m. Locate the center of gravity, the point at which application of the single gravitational force Mg (where M = m + m + m + is the total mass of the object) has the same effect on rotation as does the combined effect of all the individual gravitational forces m i g i. Equating the torque resulting from Mg acting at the center of gravity to the sum of the torques acting on the individual particles gives : m g m g m g... x CG m g m g x x m g... x If we assume uniform g over the object then the g terms cancel and we obtain : x CG mx mx mx... m m m... (.4) The center of gravity is located at the center of mass as long as the object is in a uniform gravitational field.
11 Example. ) The Seesaw A uniform 40.0-N board supports a father and daughter weighing 800 N and 50 N, respectively, as shown in Figure (.7). If the support (called the fulcrum) under the center of gravity of the board and if the father is.00 m from the center, (a) determine the magnitude of the upward force n exerted on the board by the support, (b) Determine where the child should sit to balance the system..00 m n x 800 N 40.0 N 50 N Figure (.7)
12 Example. ) A Weighted Hand A person holds a 50.0-N sphere in his hand. The forearm is horizontal, as shown in Figure (.8a). The biceps muscle is attached.00 cm from the joint, and the sphere is 5.0 cm form the joint. (a)find the upward force exerted by the biceps on the forearm and the downward force exerted by the upper arm on the forearm and acting at the joint. Neglect the weight of the forearm. (b) In reality, the biceps makes an angle of 5.0 o with the vertical; thus F has both a vertical and a horizontal component. Find the magnitude of F and the components of R when you include this fact in your analysis. Figure (.8) mg = 50.0 N d =.00 cm = 5.0 cm F O R d mg
13 Example.) Standing on a Horizontal Beam A uniform horizontal beam with a length of 8.00 m and a weight of 00 N is attached to a wall by a pin connection. Its far end is supported by a cable that makes an angle of 5.0 o with the horizontal (Figure (.9a). If a 600-N person stands.00 m from the wall, find the tension in the cable, as well as the magnitude and direction of the force exerted by the wall on the beam. Figure (.9) (a) 5.0 o 8.00 m R T R sin T sin 5.0 o 5.0 o R cos T cos 5.0 o 600 N 00 N (b).00 m 600 N 4.00 m 00 N
14 Example.4) The Leaning Ladder A uniform ladder of length and weight mg = 50 N rests against a smooth, vertical wall (Figure (.0a). If the coefficient of static friction between the ladder and the grond is s = 0.40, find the minimum angle min at which the ladder does not slip. O P n R (a) O f mg (b) Figure (.0)
15
16
Physics 101 Lecture 12 Equilibrium
 Physics 101 Lecture 12 Equilibrium Assist. Prof. Dr. Ali ÖVGÜN EMU Physics Department www.aovgun.com Static Equilibrium q Equilibrium and static equilibrium q Static equilibrium conditions n Net eternal
Physics 101 Lecture 12 Equilibrium Assist. Prof. Dr. Ali ÖVGÜN EMU Physics Department www.aovgun.com Static Equilibrium q Equilibrium and static equilibrium q Static equilibrium conditions n Net eternal
Chapter 12. Static Equilibrium and Elasticity
 Chapter 12 Static Equilibrium and Elasticity Static Equilibrium Equilibrium implies that the object moves with both constant velocity and constant angular velocity relative to an observer in an inertial
Chapter 12 Static Equilibrium and Elasticity Static Equilibrium Equilibrium implies that the object moves with both constant velocity and constant angular velocity relative to an observer in an inertial
Torque and Static Equilibrium
 Torque and Static Equilibrium Rigid Bodies Rigid body: An extended object in which the distance between any two points in the object is constant in time. Examples: sphere, disk Effect of external forces
Torque and Static Equilibrium Rigid Bodies Rigid body: An extended object in which the distance between any two points in the object is constant in time. Examples: sphere, disk Effect of external forces
Chapter 9 TORQUE & Rotational Kinematics
 Chapter 9 TORQUE & Rotational Kinematics This motionless person is in static equilibrium. The forces acting on him add up to zero. Both forces are vertical in this case. This car is in dynamic equilibrium
Chapter 9 TORQUE & Rotational Kinematics This motionless person is in static equilibrium. The forces acting on him add up to zero. Both forces are vertical in this case. This car is in dynamic equilibrium
Chapter 8. Rotational Equilibrium and Rotational Dynamics
 Chapter 8 Rotational Equilibrium and Rotational Dynamics Force vs. Torque Forces cause accelerations Torques cause angular accelerations Force and torque are related Torque The door is free to rotate about
Chapter 8 Rotational Equilibrium and Rotational Dynamics Force vs. Torque Forces cause accelerations Torques cause angular accelerations Force and torque are related Torque The door is free to rotate about
Static Equilibrium and Torque
 10.3 Static Equilibrium and Torque SECTION OUTCOMES Use vector analysis in two dimensions for systems involving static equilibrium and torques. Apply static torques to structures such as seesaws and bridges.
10.3 Static Equilibrium and Torque SECTION OUTCOMES Use vector analysis in two dimensions for systems involving static equilibrium and torques. Apply static torques to structures such as seesaws and bridges.
Statics. Phys101 Lectures 19,20. Key points: The Conditions for static equilibrium Solving statics problems Stress and strain. Ref: 9-1,2,3,4,5.
 Phys101 Lectures 19,20 Statics Key points: The Conditions for static equilibrium Solving statics problems Stress and strain Ref: 9-1,2,3,4,5. Page 1 The Conditions for Static Equilibrium An object in static
Phys101 Lectures 19,20 Statics Key points: The Conditions for static equilibrium Solving statics problems Stress and strain Ref: 9-1,2,3,4,5. Page 1 The Conditions for Static Equilibrium An object in static
Definition. is a measure of how much a force acting on an object causes that object to rotate, symbol is, (Greek letter tau)
") Torque Definition is a measure of how much a force acting on an object causes that object to rotate, symbol is, (Greek letter tau) = r F = rfsin, r = distance from pivot to force, F is the applied force
Torque Definition is a measure of how much a force acting on an object causes that object to rotate, symbol is, (Greek letter tau) = r F = rfsin, r = distance from pivot to force, F is the applied force
Application of Forces. Chapter Eight. Torque. Force vs. Torque. Torque, cont. Direction of Torque 4/7/2015
 Raymond A. Serway Chris Vuille Chapter Eight Rotational Equilibrium and Rotational Dynamics Application of Forces The point of application of a force is important This was ignored in treating objects as
Raymond A. Serway Chris Vuille Chapter Eight Rotational Equilibrium and Rotational Dynamics Application of Forces The point of application of a force is important This was ignored in treating objects as
Static Equilibrium. Lana Sheridan. Dec 5, De Anza College
 tatic Equilibrium Lana heridan De Anza College Dec 5, 2016 Last time simple harmonic motion Overview Introducing static equilibrium center of gravity tatic Equilibrium: ystem in Equilibrium Knowing that
tatic Equilibrium Lana heridan De Anza College Dec 5, 2016 Last time simple harmonic motion Overview Introducing static equilibrium center of gravity tatic Equilibrium: ystem in Equilibrium Knowing that
Chapter 8 Rotational Equilibrium and Rotational Dynamics Force vs. Torque Forces cause accelerations Torques cause angular accelerations Force and
 Chapter 8 Rotational Equilibrium and Rotational Dynamics Force vs. Torque Forces cause accelerations Torques cause angular accelerations Force and torque are related Torque The door is free to rotate about
Chapter 8 Rotational Equilibrium and Rotational Dynamics Force vs. Torque Forces cause accelerations Torques cause angular accelerations Force and torque are related Torque The door is free to rotate about
Physics 201 Lab 9: Torque and the Center of Mass Dr. Timothy C. Black
 Theoretical Discussion Physics 201 Lab 9: Torque and the Center of Mass Dr. Timothy C. Black For each of the linear kinematic variables; displacement r, velocity v and acceleration a; there is a corresponding
Theoretical Discussion Physics 201 Lab 9: Torque and the Center of Mass Dr. Timothy C. Black For each of the linear kinematic variables; displacement r, velocity v and acceleration a; there is a corresponding
Recap I. Angular position: Angular displacement: s. Angular velocity: Angular Acceleration:
 Recap I Angular position: Angular displacement: s Angular velocity: Angular Acceleration: Every point on a rotating rigid object has the same angular, but not the same linear motion! Recap II Circular
Recap I Angular position: Angular displacement: s Angular velocity: Angular Acceleration: Every point on a rotating rigid object has the same angular, but not the same linear motion! Recap II Circular
Torque rotational force which causes a change in rotational motion. This force is defined by linear force multiplied by a radius.
 Warm up A remote-controlled car's wheel accelerates at 22.4 rad/s 2. If the wheel begins with an angular speed of 10.8 rad/s, what is the wheel's angular speed after exactly three full turns? AP Physics
Warm up A remote-controlled car's wheel accelerates at 22.4 rad/s 2. If the wheel begins with an angular speed of 10.8 rad/s, what is the wheel's angular speed after exactly three full turns? AP Physics
PHYS 1441 Section 002 Lecture #23
 PHYS 1441 Section 002 Lecture #23 Monday, April 29, 2013 Conditions for Equilibrium Elastic Properties of Solids Young s Modulus Bulk Modulus Density and Specific Gravity luid and Pressure Today s homework
PHYS 1441 Section 002 Lecture #23 Monday, April 29, 2013 Conditions for Equilibrium Elastic Properties of Solids Young s Modulus Bulk Modulus Density and Specific Gravity luid and Pressure Today s homework
Rotational Mechanics Part II Torque. Pre AP Physics
 Rotational Mechanics Part II Torque Pre AP Physics We have so far discussed rotational kinematics the description of rotational motion in terms of angle, angular velocity and angular acceleration. Now
Rotational Mechanics Part II Torque Pre AP Physics We have so far discussed rotational kinematics the description of rotational motion in terms of angle, angular velocity and angular acceleration. Now
Chapter 18 Static Equilibrium
 Chapter 8 Static Equilibrium Chapter 8 Static Equilibrium... 8. Introduction Static Equilibrium... 8. Lever Law... 3 Example 8. Lever Law... 5 8.3 Generalized Lever Law... 6 8.4 Worked Examples... 8 Example
Chapter 8 Static Equilibrium Chapter 8 Static Equilibrium... 8. Introduction Static Equilibrium... 8. Lever Law... 3 Example 8. Lever Law... 5 8.3 Generalized Lever Law... 6 8.4 Worked Examples... 8 Example
Chapter 8. Rotational Equilibrium and Rotational Dynamics. 1. Torque. 2. Torque and Equilibrium. 3. Center of Mass and Center of Gravity
 Chapter 8 Rotational Equilibrium and Rotational Dynamics 1. Torque 2. Torque and Equilibrium 3. Center of Mass and Center of Gravity 4. Torque and angular acceleration 5. Rotational Kinetic energy 6. Angular
Chapter 8 Rotational Equilibrium and Rotational Dynamics 1. Torque 2. Torque and Equilibrium 3. Center of Mass and Center of Gravity 4. Torque and angular acceleration 5. Rotational Kinetic energy 6. Angular
Chapter 12 Static Equilibrium; Elasticity and Fracture
 2009 Pearson Education, Inc. This work is protected by United States copyright laws and is provided solely for the use of instructors in teaching their courses and assessing student learning. Dissemination
2009 Pearson Education, Inc. This work is protected by United States copyright laws and is provided solely for the use of instructors in teaching their courses and assessing student learning. Dissemination
Rotational Motion What is the difference between translational and rotational motion? Translational motion.
 Rotational Motion 1 1. What is the difference between translational and rotational motion? Translational motion Rotational motion 2. What is a rigid object? 3. What is rotational motion? 4. Identify and
Rotational Motion 1 1. What is the difference between translational and rotational motion? Translational motion Rotational motion 2. What is a rigid object? 3. What is rotational motion? 4. Identify and
Announcements Oct 16, 2014
 Announcements Oct 16, 2014 1. Prayer 2. While waiting, see how many of these blanks you can fill out: Centripetal Accel.: Causes change in It points but not Magnitude: a c = How to use with N2: Always
Announcements Oct 16, 2014 1. Prayer 2. While waiting, see how many of these blanks you can fill out: Centripetal Accel.: Causes change in It points but not Magnitude: a c = How to use with N2: Always
Chapter 9- Static Equilibrium
 Chapter 9- Static Equilibrium Changes in Office-hours The following changes will take place until the end of the semester Office-hours: - Monday, 12:00-13:00h - Wednesday, 14:00-15:00h - Friday, 13:00-14:00h
Chapter 9- Static Equilibrium Changes in Office-hours The following changes will take place until the end of the semester Office-hours: - Monday, 12:00-13:00h - Wednesday, 14:00-15:00h - Friday, 13:00-14:00h
Chapter 9. Rotational Dynamics
 Chapter 9 Rotational Dynamics In pure translational motion, all points on an object travel on parallel paths. The most general motion is a combination of translation and rotation. 1) Torque Produces angular
Chapter 9 Rotational Dynamics In pure translational motion, all points on an object travel on parallel paths. The most general motion is a combination of translation and rotation. 1) Torque Produces angular
CHAPTER 12 STATIC EQUILIBRIUM AND ELASTICITY. Conditions for static equilibrium Center of gravity (weight) Examples of static equilibrium
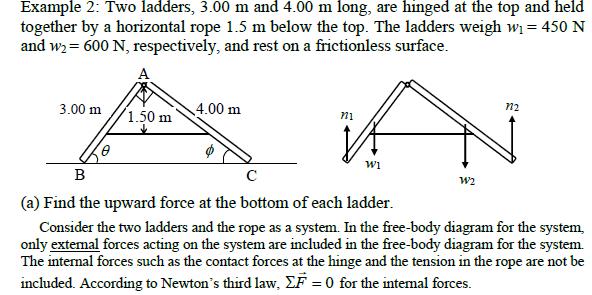
 Examples of static equilibrium") CHAPTER 12 STATIC EQUILIBRIUM AND ELASTICITY As previously defined, an object is in equilibrium when it is at rest or moving with constant velocity, i.e., with no net force acting on it. The following
CHAPTER 12 STATIC EQUILIBRIUM AND ELASTICITY As previously defined, an object is in equilibrium when it is at rest or moving with constant velocity, i.e., with no net force acting on it. The following
Chapter 9. Rotational Dynamics
 Chapter 9 Rotational Dynamics In pure translational motion, all points on an object travel on parallel paths. The most general motion is a combination of translation and rotation. 1) Torque Produces angular
Chapter 9 Rotational Dynamics In pure translational motion, all points on an object travel on parallel paths. The most general motion is a combination of translation and rotation. 1) Torque Produces angular
Angular Momentum L = I ω
 Angular Momentum L = Iω If no NET external Torques act on a system then Angular Momentum is Conserved. Linitial = I ω = L final = Iω Angular Momentum L = Iω Angular Momentum L = I ω A Skater spins with
Angular Momentum L = Iω If no NET external Torques act on a system then Angular Momentum is Conserved. Linitial = I ω = L final = Iω Angular Momentum L = Iω Angular Momentum L = I ω A Skater spins with
Physics A - PHY 2048C
 Physics A - PHY 2048C Mass & Weight, Force, and Friction 10/04/2017 My Office Hours: Thursday 2:00-3:00 PM 212 Keen Building Warm-up Questions 1 Did you read Chapters 6.1-6.6? 2 In your own words: What
Physics A - PHY 2048C Mass & Weight, Force, and Friction 10/04/2017 My Office Hours: Thursday 2:00-3:00 PM 212 Keen Building Warm-up Questions 1 Did you read Chapters 6.1-6.6? 2 In your own words: What
Section 2: Static Equilibrium II- Balancing Torques
 Section 2: Static Equilibrium II- Balancing Torques Last Section: If (ie. Forces up = Forces down and Forces left = Forces right), then the object will have no translatory motion. In other words, the object
Section 2: Static Equilibrium II- Balancing Torques Last Section: If (ie. Forces up = Forces down and Forces left = Forces right), then the object will have no translatory motion. In other words, the object
Angular Momentum L = I ω
 Angular Momentum L = Iω If no NET external Torques act on a system then Angular Momentum is Conserved. Linitial = I ω = L final = Iω Angular Momentum L = Iω Angular Momentum L = I ω A Skater spins with
Angular Momentum L = Iω If no NET external Torques act on a system then Angular Momentum is Conserved. Linitial = I ω = L final = Iω Angular Momentum L = Iω Angular Momentum L = I ω A Skater spins with
Chapter 8 continued. Rotational Dynamics
 Chapter 8 continued Rotational Dynamics 8.6 The Action of Forces and Torques on Rigid Objects Chapter 8 developed the concepts of angular motion. θ : angles and radian measure for angular variables ω :
Chapter 8 continued Rotational Dynamics 8.6 The Action of Forces and Torques on Rigid Objects Chapter 8 developed the concepts of angular motion. θ : angles and radian measure for angular variables ω :
Static equilibrium. Objectives. Physics terms. Assessment. Brainstorm. Equations 6/3/14
 Static equilibrium Objectives State the conditions of static equilibrium in terms of forces and torques. Draw a free-body diagram of a lever showing all forces. Use the condition of equilibrium to solve
Static equilibrium Objectives State the conditions of static equilibrium in terms of forces and torques. Draw a free-body diagram of a lever showing all forces. Use the condition of equilibrium to solve
Chapter 9 Rotational Dynamics
 Chapter 9 ROTATIONAL DYNAMICS PREVIEW A force acting at a perpendicular distance from a rotation point, such as pushing a doorknob and causing the door to rotate on its hinges, produces a torque. If the
Chapter 9 ROTATIONAL DYNAMICS PREVIEW A force acting at a perpendicular distance from a rotation point, such as pushing a doorknob and causing the door to rotate on its hinges, produces a torque. If the
Please Visit us at:
 IMPORTANT QUESTIONS WITH ANSWERS Q # 1. Differentiate among scalars and vectors. Scalars Vectors (i) The physical quantities that are completely (i) The physical quantities that are completely described
IMPORTANT QUESTIONS WITH ANSWERS Q # 1. Differentiate among scalars and vectors. Scalars Vectors (i) The physical quantities that are completely (i) The physical quantities that are completely described
Chapter 8. Centripetal Force and The Law of Gravity
 Chapter 8 Centripetal Force and The Law of Gravity Centripetal Acceleration An object traveling in a circle, even though it moves with a constant speed, will have an acceleration The centripetal acceleration
Chapter 8 Centripetal Force and The Law of Gravity Centripetal Acceleration An object traveling in a circle, even though it moves with a constant speed, will have an acceleration The centripetal acceleration
Chapter 8. Rotational Equilibrium and Rotational Dynamics
 Chapter 8 Rotational Equilibrium and Rotational Dynamics 1 Force vs. Torque Forces cause accelerations Torques cause angular accelerations Force and torque are related 2 Torque The door is free to rotate
Chapter 8 Rotational Equilibrium and Rotational Dynamics 1 Force vs. Torque Forces cause accelerations Torques cause angular accelerations Force and torque are related 2 Torque The door is free to rotate
Physics 1A Lecture 10B
 Physics 1A Lecture 10B "Sometimes the world puts a spin on life. When our equilibrium returns to us, we understand more because we've seen the whole picture. --Davis Barton Cross Products Another way to
Physics 1A Lecture 10B "Sometimes the world puts a spin on life. When our equilibrium returns to us, we understand more because we've seen the whole picture. --Davis Barton Cross Products Another way to
Chapter 8 - Rotational Dynamics and Equilibrium REVIEW
 Pagpalain ka! (Good luck, in Filipino) Date Chapter 8 - Rotational Dynamics and Equilibrium REVIEW TRUE/FALSE. Write 'T' if the statement is true and 'F' if the statement is false. 1) When a rigid body
Pagpalain ka! (Good luck, in Filipino) Date Chapter 8 - Rotational Dynamics and Equilibrium REVIEW TRUE/FALSE. Write 'T' if the statement is true and 'F' if the statement is false. 1) When a rigid body
Physics 101 Lecture 12 Equilibrium and Angular Momentum
 Physics 101 Lecture 1 Equilibrium and Angular Momentum Ali ÖVGÜN EMU Physics Department www.aovgun.com Static Equilibrium q Equilibrium and static equilibrium q Static equilibrium conditions n Net external
Physics 101 Lecture 1 Equilibrium and Angular Momentum Ali ÖVGÜN EMU Physics Department www.aovgun.com Static Equilibrium q Equilibrium and static equilibrium q Static equilibrium conditions n Net external
Static Equilibrium; Torque
 Static Equilibrium; Torque The Conditions for Equilibrium An object with forces acting on it, but that is not moving, is said to be in equilibrium. The first condition for equilibrium is that the net force
Static Equilibrium; Torque The Conditions for Equilibrium An object with forces acting on it, but that is not moving, is said to be in equilibrium. The first condition for equilibrium is that the net force
Torques and Static Equilibrium
 Torques and Static Equilibrium INTRODUCTION Archimedes, Greek mathematician, physicist, engineer, inventor and astronomer, was widely regarded as the leading scientist of the ancient world. He made a study
Torques and Static Equilibrium INTRODUCTION Archimedes, Greek mathematician, physicist, engineer, inventor and astronomer, was widely regarded as the leading scientist of the ancient world. He made a study
Rotational Kinetic Energy
 Lecture 17, Chapter 10: Rotational Energy and Angular Momentum 1 Rotational Kinetic Energy Consider a rigid body rotating with an angular velocity ω about an axis. Clearly every point in the rigid body
Lecture 17, Chapter 10: Rotational Energy and Angular Momentum 1 Rotational Kinetic Energy Consider a rigid body rotating with an angular velocity ω about an axis. Clearly every point in the rigid body
Rotational Equilibrium
 Rotational Equilibrium 6-1 Rotational Equilibrium INTRODUCTION Have you ever tried to pull a stubborn nail out of a board or develop your forearm muscles by lifting weights? Both these activities involve
Rotational Equilibrium 6-1 Rotational Equilibrium INTRODUCTION Have you ever tried to pull a stubborn nail out of a board or develop your forearm muscles by lifting weights? Both these activities involve
General Physics (PHY 2130)
") General Physics (PHY 130) Lecture 0 Rotational dynamics equilibrium nd Newton s Law for rotational motion rolling Exam II review http://www.physics.wayne.edu/~apetrov/phy130/ Lightning Review Last lecture:
General Physics (PHY 130) Lecture 0 Rotational dynamics equilibrium nd Newton s Law for rotational motion rolling Exam II review http://www.physics.wayne.edu/~apetrov/phy130/ Lightning Review Last lecture:
Section 2: Static Equilibrium II- Balancing Torques
 Section 2: Static Equilibrium II- Balancing Torques Last Section: If (ie. Forces up = Forces down and Forces left = Forces right), then the object will have no translatory motion. In other words, the object
Section 2: Static Equilibrium II- Balancing Torques Last Section: If (ie. Forces up = Forces down and Forces left = Forces right), then the object will have no translatory motion. In other words, the object
PHY 1150 Doug Davis Chapter 8; Static Equilibrium 8.3, 10, 22, 29, 52, 55, 56, 74
 PHY 1150 Doug Davis Chapter 8; Static Equilibrium 8.3, 10, 22, 29, 52, 55, 56, 74 8.3 A 2-kg ball is held in position by a horizontal string and a string that makes an angle of 30 with the vertical, as
PHY 1150 Doug Davis Chapter 8; Static Equilibrium 8.3, 10, 22, 29, 52, 55, 56, 74 8.3 A 2-kg ball is held in position by a horizontal string and a string that makes an angle of 30 with the vertical, as
Ishik University / Sulaimani Architecture Department Structure ARCH 214 Chapter -4- Force System Resultant
 Ishik University / Sulaimani Architecture Department 1 Structure ARCH 214 Chapter -4- Force System Resultant 2 1 CHAPTER OBJECTIVES To discuss the concept of the moment of a force and show how to calculate
Ishik University / Sulaimani Architecture Department 1 Structure ARCH 214 Chapter -4- Force System Resultant 2 1 CHAPTER OBJECTIVES To discuss the concept of the moment of a force and show how to calculate
Chapter 8 continued. Rotational Dynamics
 Chapter 8 continued Rotational Dynamics 8.4 Rotational Work and Energy Work to accelerate a mass rotating it by angle φ F W = F(cosθ)x x = rφ = Frφ Fr = τ (torque) = τφ r φ s F to x θ = 0 DEFINITION OF
Chapter 8 continued Rotational Dynamics 8.4 Rotational Work and Energy Work to accelerate a mass rotating it by angle φ F W = F(cosθ)x x = rφ = Frφ Fr = τ (torque) = τφ r φ s F to x θ = 0 DEFINITION OF
Chapter 8. Rotational Motion
 Chapter 8 Rotational Motion The Action of Forces and Torques on Rigid Objects In pure translational motion, all points on an object travel on parallel paths. The most general motion is a combination of
Chapter 8 Rotational Motion The Action of Forces and Torques on Rigid Objects In pure translational motion, all points on an object travel on parallel paths. The most general motion is a combination of
UNIT 6 STATICS AND TORQUE. Objectives. to be able to solve problems involving static equilibrium
 to understand the concept of torque to be able to calculate torques UNIT 6 STATICS AND TORQUE Objectives to understand the concept of static equilibrium to be able to solve problems involving static equilibrium
to understand the concept of torque to be able to calculate torques UNIT 6 STATICS AND TORQUE Objectives to understand the concept of static equilibrium to be able to solve problems involving static equilibrium
Structures Activity 2 Levers
 Structures Activity 2 Levers Object: The objects of this activity are to explore the concepts of torque and rotational equilibrium, study the three classes of lever, and apply the concepts of torque and
Structures Activity 2 Levers Object: The objects of this activity are to explore the concepts of torque and rotational equilibrium, study the three classes of lever, and apply the concepts of torque and
Static Equilibrium. Lecture 24. Chapter 12. Physics I. Department of Physics and Applied Physics
 Lecture 24 Chapter 12 Physics I Static Equilibrium Course website: http://faculty.uml.edu/andriy_danylov/teaching/physicsi IN THIS CHAPTER, you will discuss static equilibrium of an object Today we are
Lecture 24 Chapter 12 Physics I Static Equilibrium Course website: http://faculty.uml.edu/andriy_danylov/teaching/physicsi IN THIS CHAPTER, you will discuss static equilibrium of an object Today we are
2008 FXA THREE FORCES IN EQUILIBRIUM 1. Candidates should be able to : TRIANGLE OF FORCES RULE
 THREE ORCES IN EQUILIBRIUM 1 Candidates should be able to : TRIANGLE O ORCES RULE Draw and use a triangle of forces to represent the equilibrium of three forces acting at a point in an object. State that
THREE ORCES IN EQUILIBRIUM 1 Candidates should be able to : TRIANGLE O ORCES RULE Draw and use a triangle of forces to represent the equilibrium of three forces acting at a point in an object. State that
Physics 2210 Homework 18 Spring 2015
 Physics 2210 Homework 18 Spring 2015 Charles Jui April 12, 2015 IE Sphere Incline Wording A solid sphere of uniform density starts from rest and rolls without slipping down an inclined plane with angle
Physics 2210 Homework 18 Spring 2015 Charles Jui April 12, 2015 IE Sphere Incline Wording A solid sphere of uniform density starts from rest and rolls without slipping down an inclined plane with angle
Physics 8 Wednesday, October 25, 2017
 Physics 8 Wednesday, October 25, 2017 HW07 due Friday. It is mainly rotation, plus a couple of basic torque questions. And there are only 8 problems this week. For today, you read (in Perusall) Onouye/Kane
Physics 8 Wednesday, October 25, 2017 HW07 due Friday. It is mainly rotation, plus a couple of basic torque questions. And there are only 8 problems this week. For today, you read (in Perusall) Onouye/Kane
Torque. Physics 6A. Prepared by Vince Zaccone For Campus Learning Assistance Services at UCSB
 Physics 6A Torque is what causes angular acceleration (just like a force causes linear acceleration) Torque is what causes angular acceleration (just like a force causes linear acceleration) For a torque
Physics 6A Torque is what causes angular acceleration (just like a force causes linear acceleration) Torque is what causes angular acceleration (just like a force causes linear acceleration) For a torque
PHYSICS - CLUTCH CH 13: ROTATIONAL EQUILIBRIUM.
 !! www.clutchprep.com EXAMPLE: POSITION OF SECOND KID ON SEESAW EXAMPLE: A 4 m-long seesaw 50 kg in mass and of uniform mass distribution is pivoted on a fulcrum at its middle, as shown. Two kids sit on
!! www.clutchprep.com EXAMPLE: POSITION OF SECOND KID ON SEESAW EXAMPLE: A 4 m-long seesaw 50 kg in mass and of uniform mass distribution is pivoted on a fulcrum at its middle, as shown. Two kids sit on
Unit 4 Statics. Static Equilibrium Translational Forces Torque
 Unit 4 Statics Static Equilibrium Translational Forces Torque 1 Dynamics vs Statics Dynamics: is the study of forces and motion. We study why objects move. Statics: is the study of forces and NO motion.
Unit 4 Statics Static Equilibrium Translational Forces Torque 1 Dynamics vs Statics Dynamics: is the study of forces and motion. We study why objects move. Statics: is the study of forces and NO motion.
Chapter 8 continued. Rotational Dynamics
 Chapter 8 continued Rotational Dynamics 8.4 Rotational Work and Energy Work to accelerate a mass rotating it by angle φ F W = F(cosθ)x x = s = rφ = Frφ Fr = τ (torque) = τφ r φ s F to s θ = 0 DEFINITION
Chapter 8 continued Rotational Dynamics 8.4 Rotational Work and Energy Work to accelerate a mass rotating it by angle φ F W = F(cosθ)x x = s = rφ = Frφ Fr = τ (torque) = τφ r φ s F to s θ = 0 DEFINITION
Static Equilibrium and Elasticity. Luis Anchordoqui
 Static Equilibrium and Elasticity The Conditions for Equilibrium An object with forces acting on it, but that is not moving, is said to be in equilibrium. The Conditions for Equilibrium (cont d) The first
Static Equilibrium and Elasticity The Conditions for Equilibrium An object with forces acting on it, but that is not moving, is said to be in equilibrium. The Conditions for Equilibrium (cont d) The first
Physics 6A Lab Experiment 6
 Biceps Muscle Model Physics 6A Lab Experiment 6 APPARATUS Biceps model Large mass hanger with four 1-kg masses Small mass hanger for hand end of forearm bar with five 100-g masses Meter stick Centimeter
Biceps Muscle Model Physics 6A Lab Experiment 6 APPARATUS Biceps model Large mass hanger with four 1-kg masses Small mass hanger for hand end of forearm bar with five 100-g masses Meter stick Centimeter
Lecture 2 - Force Analysis
 Lecture 2 - orce Analysis A Puzzle... Triangle or quadrilateral? 4 distinct points in a plane can either be arrange as a triangle with a point inside or as a quadrilateral. Extra Brownie Points: Use the
Lecture 2 - orce Analysis A Puzzle... Triangle or quadrilateral? 4 distinct points in a plane can either be arrange as a triangle with a point inside or as a quadrilateral. Extra Brownie Points: Use the
Dynamics. Dynamics of mechanical particle and particle systems (many body systems)
") Dynamics Dynamics of mechanical particle and particle systems (many body systems) Newton`s first law: If no net force acts on a body, it will move on a straight line at constant velocity or will stay at
Dynamics Dynamics of mechanical particle and particle systems (many body systems) Newton`s first law: If no net force acts on a body, it will move on a straight line at constant velocity or will stay at
Equilibrium & Elasticity
 PHYS 101 Previous Exam Problems CHAPTER 12 Equilibrium & Elasticity Static equilibrium Elasticity 1. A uniform steel bar of length 3.0 m and weight 20 N rests on two supports (A and B) at its ends. A block
PHYS 101 Previous Exam Problems CHAPTER 12 Equilibrium & Elasticity Static equilibrium Elasticity 1. A uniform steel bar of length 3.0 m and weight 20 N rests on two supports (A and B) at its ends. A block
is the study of and. We study objects. is the study of and. We study objects.
 Static Equilibrium Translational Forces Torque Unit 4 Statics Dynamics vs Statics is the study of and. We study objects. is the study of and. We study objects. Recall Newton s First Law All objects remain
Static Equilibrium Translational Forces Torque Unit 4 Statics Dynamics vs Statics is the study of and. We study objects. is the study of and. We study objects. Recall Newton s First Law All objects remain
Answers to selected problems from Essential Physics, Chapter 10
 Answers to selected problems from Essential Physics, Chapter 10 1. (a) The red ones have the same speed as one another. The blue ones also have the same speed as one another, with a value twice the speed
Answers to selected problems from Essential Physics, Chapter 10 1. (a) The red ones have the same speed as one another. The blue ones also have the same speed as one another, with a value twice the speed
Chapter 12: Rotation of Rigid Bodies. Center of Mass Moment of Inertia Torque Angular Momentum Rolling Statics
 Chapter 12: Rotation of Rigid Bodies Center of Mass Moment of Inertia Torque Angular Momentum Rolling Statics Translational vs Rotational 2 / / 1/ 2 m x v dx dt a dv dt F ma p mv KE mv Work Fd P Fv 2 /
Chapter 12: Rotation of Rigid Bodies Center of Mass Moment of Inertia Torque Angular Momentum Rolling Statics Translational vs Rotational 2 / / 1/ 2 m x v dx dt a dv dt F ma p mv KE mv Work Fd P Fv 2 /
Physics 111. Lecture 22 (Walker: ) Torque Rotational Dynamics Static Equilibrium Oct. 28, 2009
 Torque Rotational Dynamics Static Equilibrium Oct. 28, 2009") Physics 111 Lecture 22 (Walker: 11.1-3) Torque Rotational Dynamics Static Equilibrium Oct. 28, 2009 Lecture 22 1/26 Torque (τ) We define a quantity called torque which is a measure of twisting effort.
Physics 111 Lecture 22 (Walker: 11.1-3) Torque Rotational Dynamics Static Equilibrium Oct. 28, 2009 Lecture 22 1/26 Torque (τ) We define a quantity called torque which is a measure of twisting effort.
Table of Contents. Pg. # Momentum & Impulse (Bozemanscience Videos) 1 1/11/16
 1 1/11/16") Table of Contents g. # 1 1/11/16 Momentum & Impulse (Bozemanscience Videos) 2 1/13/16 Conservation of Momentum 3 1/19/16 Elastic and Inelastic Collisions 4 1/19/16 Lab 1 Momentum 5 1/26/16 Rotational Dynamics
Table of Contents g. # 1 1/11/16 Momentum & Impulse (Bozemanscience Videos) 2 1/13/16 Conservation of Momentum 3 1/19/16 Elastic and Inelastic Collisions 4 1/19/16 Lab 1 Momentum 5 1/26/16 Rotational Dynamics
Chapter 6, Problem 18. Agenda. Rotational Inertia. Rotational Inertia. Calculating Moment of Inertia. Example: Hoop vs.
 Agenda Today: Homework quiz, moment of inertia and torque Thursday: Statics problems revisited, rolling motion Reading: Start Chapter 8 in the reading Have to cancel office hours today: will have extra
Agenda Today: Homework quiz, moment of inertia and torque Thursday: Statics problems revisited, rolling motion Reading: Start Chapter 8 in the reading Have to cancel office hours today: will have extra
Upthrust and Archimedes Principle
 1 Upthrust and Archimedes Principle Objects immersed in fluids, experience a force which tends to push them towards the surface of the liquid. This force is called upthrust and it depends on the density
1 Upthrust and Archimedes Principle Objects immersed in fluids, experience a force which tends to push them towards the surface of the liquid. This force is called upthrust and it depends on the density
1 MR SAMPLE EXAM 3 FALL 2013
 SAMPLE EXAM 3 FALL 013 1. A merry-go-round rotates from rest with an angular acceleration of 1.56 rad/s. How long does it take to rotate through the first rev? A) s B) 4 s C) 6 s D) 8 s E) 10 s. A wheel,
SAMPLE EXAM 3 FALL 013 1. A merry-go-round rotates from rest with an angular acceleration of 1.56 rad/s. How long does it take to rotate through the first rev? A) s B) 4 s C) 6 s D) 8 s E) 10 s. A wheel,
CHAPTER 8 TEST REVIEW MARKSCHEME
 AP PHYSICS Name: Period: Date: 50 Multiple Choice 45 Single Response 5 Multi-Response Free Response 3 Short Free Response 2 Long Free Response MULTIPLE CHOICE DEVIL PHYSICS BADDEST CLASS ON CAMPUS AP EXAM
AP PHYSICS Name: Period: Date: 50 Multiple Choice 45 Single Response 5 Multi-Response Free Response 3 Short Free Response 2 Long Free Response MULTIPLE CHOICE DEVIL PHYSICS BADDEST CLASS ON CAMPUS AP EXAM
Equilibrium Notes 1 Translational Equilibrium
 Equilibrium Notes 1 Translational Equilibrium Ex. A 20.0 kg object is suspended by a rope as shown. What is the net force acting on it? Ex. Ok that was easy, now that same 20.0 kg object is lifted at a
Equilibrium Notes 1 Translational Equilibrium Ex. A 20.0 kg object is suspended by a rope as shown. What is the net force acting on it? Ex. Ok that was easy, now that same 20.0 kg object is lifted at a
Announcements Oct 17, 2013
 Announcements Oct 17, 2013 1. No announcements! Colton - Lecture 14 - pg 1 Real satellites: http://science.nasa.gov/realtime/jtrack/3d/jtrack3d.html International space station, 340.5 km above surface
Announcements Oct 17, 2013 1. No announcements! Colton - Lecture 14 - pg 1 Real satellites: http://science.nasa.gov/realtime/jtrack/3d/jtrack3d.html International space station, 340.5 km above surface
Name Section Number Team Number
 Physics 218 LAB: TORQUES and STATIC EQUILIBRIUM Name Section Number Team Number Introduction One purpose of this lab is to introduce you to quantity called torque or, as engineers cail it, moment of a
Physics 218 LAB: TORQUES and STATIC EQUILIBRIUM Name Section Number Team Number Introduction One purpose of this lab is to introduce you to quantity called torque or, as engineers cail it, moment of a
Rotational Dynamics continued
 Chapter 9 Rotational Dynamics continued 9.1 The Action of Forces and Torques on Rigid Objects Chapter 8 developed the concepts of angular motion. θ : angles and radian measure for angular variables ω :
Chapter 9 Rotational Dynamics continued 9.1 The Action of Forces and Torques on Rigid Objects Chapter 8 developed the concepts of angular motion. θ : angles and radian measure for angular variables ω :
AP Physics Multiple Choice Practice Torque
 AP Physics Multiple Choice Practice Torque 1. A uniform meterstick of mass 0.20 kg is pivoted at the 40 cm mark. Where should one hang a mass of 0.50 kg to balance the stick? (A) 16 cm (B) 36 cm (C) 44
AP Physics Multiple Choice Practice Torque 1. A uniform meterstick of mass 0.20 kg is pivoted at the 40 cm mark. Where should one hang a mass of 0.50 kg to balance the stick? (A) 16 cm (B) 36 cm (C) 44
Physics 8 Wednesday, October 28, 2015
 Physics 8 Wednesday, October 8, 015 HW7 (due this Friday will be quite easy in comparison with HW6, to make up for your having a lot to read this week. For today, you read Chapter 3 (analyzes cables, trusses,
Physics 8 Wednesday, October 8, 015 HW7 (due this Friday will be quite easy in comparison with HW6, to make up for your having a lot to read this week. For today, you read Chapter 3 (analyzes cables, trusses,
use one of the methods to compute the magnitude of the torque, given the magnitudes of the force and position vector
 PH2213 : Examples from Chapter 12 : Static Equilibrium Equilibrium represents the condition where an object is not accelerating (either linearly or angularly). It can still be moving (and rotating), it
PH2213 : Examples from Chapter 12 : Static Equilibrium Equilibrium represents the condition where an object is not accelerating (either linearly or angularly). It can still be moving (and rotating), it
Physics 201, Lecture 21
 Physics 201, Lecture 21 Today s Topics q Static Equilibrium of Rigid Objects(Ch. 12.1-3) Review: Rotational and Translational Motion Conditions for Translational and Rotational Equilibrium Demos and Exercises
Physics 201, Lecture 21 Today s Topics q Static Equilibrium of Rigid Objects(Ch. 12.1-3) Review: Rotational and Translational Motion Conditions for Translational and Rotational Equilibrium Demos and Exercises
ROTATIONAL DYNAMICS AND STATIC EQUILIBRIUM
 ROTATIONAL DYNAMICS AND STATIC EQUILIBRIUM Chapter 11 Units of Chapter 11 Torque Torque and Angular Acceleration Zero Torque and Static Equilibrium Center of Mass and Balance Dynamic Applications of Torque
ROTATIONAL DYNAMICS AND STATIC EQUILIBRIUM Chapter 11 Units of Chapter 11 Torque Torque and Angular Acceleration Zero Torque and Static Equilibrium Center of Mass and Balance Dynamic Applications of Torque
Models and Anthropometry
 Learning Objectives Models and Anthropometry Readings: some of Chapter 8 [in text] some of Chapter 11 [in text] By the end of this lecture, you should be able to: Describe common anthropometric measurements
Learning Objectives Models and Anthropometry Readings: some of Chapter 8 [in text] some of Chapter 11 [in text] By the end of this lecture, you should be able to: Describe common anthropometric measurements
Chapter 8 Rotational Motion and Equilibrium. 1. Give explanation of torque in own words after doing balance-the-torques lab as an inquiry introduction
 Chapter 8 Rotational Motion and Equilibrium Name 1. Give explanation of torque in own words after doing balance-the-torques lab as an inquiry introduction 1. The distance between a turning axis and the
Chapter 8 Rotational Motion and Equilibrium Name 1. Give explanation of torque in own words after doing balance-the-torques lab as an inquiry introduction 1. The distance between a turning axis and the
Static Equilibrium. Lecture 22. Chapter 12. Physics I Department of Physics and Applied Physics
 Lecture 22 Chapter 12 Physics I 12.02.2013 Static Equilibrium Course website: http://faculty.uml.edu/andriy_danylov/teaching/physicsi Lecture Capture: http://echo360.uml.edu/danylov2013/physics1fall.html
Lecture 22 Chapter 12 Physics I 12.02.2013 Static Equilibrium Course website: http://faculty.uml.edu/andriy_danylov/teaching/physicsi Lecture Capture: http://echo360.uml.edu/danylov2013/physics1fall.html
Physics 101 Lecture 11 Torque
 Physics 101 Lecture 11 Torque Dr. Ali ÖVGÜN EMU Physics Department www.aovgun.com Force vs. Torque q Forces cause accelerations q What cause angular accelerations? q A door is free to rotate about an axis
Physics 101 Lecture 11 Torque Dr. Ali ÖVGÜN EMU Physics Department www.aovgun.com Force vs. Torque q Forces cause accelerations q What cause angular accelerations? q A door is free to rotate about an axis
Consider two students pushing with equal force on opposite sides of a desk. Looking top-down on the desk:
 1 Bodies in Equilibrium Recall Newton's First Law: if there is no unbalanced force on a body (i.e. if F Net = 0), the body is in equilibrium. That is, if a body is in equilibrium, then all the forces on
1 Bodies in Equilibrium Recall Newton's First Law: if there is no unbalanced force on a body (i.e. if F Net = 0), the body is in equilibrium. That is, if a body is in equilibrium, then all the forces on
LECTURE 22 EQUILIBRIUM. Instructor: Kazumi Tolich
 LECTURE 22 EQUILIBRIUM Instructor: Kazumi Tolich Lecture 22 2 Reading chapter 11-3 to 11-4 Static equilibrium Center of mass and balance Static equilibrium 3 If a rigid object is in equilibrium (constant
LECTURE 22 EQUILIBRIUM Instructor: Kazumi Tolich Lecture 22 2 Reading chapter 11-3 to 11-4 Static equilibrium Center of mass and balance Static equilibrium 3 If a rigid object is in equilibrium (constant
α = p = m v L = I ω Review: Torque Physics 201, Lecture 21 Review: Rotational Dynamics a = Στ = I α
 Physics 1, Lecture 1 Today s Topics q Static Equilibrium of Rigid Objects(Ch. 1.1-3) Review: Rotational and Translational Motion Conditions for Translational and Rotational Equilibrium Demos and Exercises
Physics 1, Lecture 1 Today s Topics q Static Equilibrium of Rigid Objects(Ch. 1.1-3) Review: Rotational and Translational Motion Conditions for Translational and Rotational Equilibrium Demos and Exercises
Newton s Laws of Motion and Gravitation
 Newton s Laws of Motion and Gravitation Introduction: In Newton s first law we have discussed the equilibrium condition for a particle and seen that when the resultant force acting on the particle is zero,
Newton s Laws of Motion and Gravitation Introduction: In Newton s first law we have discussed the equilibrium condition for a particle and seen that when the resultant force acting on the particle is zero,
20 Torque & Circular Motion
 Chapter 0 Torque & Circular Motion 0 Torque & Circular Motion The mistake that crops up in the application of Newton s nd Law for Rotational Motion involves the replacement of the sum of the torques about
Chapter 0 Torque & Circular Motion 0 Torque & Circular Motion The mistake that crops up in the application of Newton s nd Law for Rotational Motion involves the replacement of the sum of the torques about
The... of a particle is defined as its change in position in some time interval.
 Distance is the. of a path followed by a particle. Distance is a quantity. The... of a particle is defined as its change in position in some time interval. Displacement is a.. quantity. The... of a particle
Distance is the. of a path followed by a particle. Distance is a quantity. The... of a particle is defined as its change in position in some time interval. Displacement is a.. quantity. The... of a particle
STATIC EQUILIBRIUM. Purpose
 Purpose Theory STATIC EQUILIBRIUM a. To understand torque by experimentally measuring and manipulating them. b. To determine static equilibrium conditions by different torques that operate on a system.
Purpose Theory STATIC EQUILIBRIUM a. To understand torque by experimentally measuring and manipulating them. b. To determine static equilibrium conditions by different torques that operate on a system.
Chapter -4- Force System Resultant
 Ishik University / Sulaimani Civil Engineering Department Chapter -4- Force System Resultant 1 2 1 CHAPTER OBJECTIVES To discuss the concept of the moment of a force and show how to calculate it in two
Ishik University / Sulaimani Civil Engineering Department Chapter -4- Force System Resultant 1 2 1 CHAPTER OBJECTIVES To discuss the concept of the moment of a force and show how to calculate it in two
Equilibrium. For an object to remain in equilibrium, two conditions must be met. The object must have no net force: and no net torque:
 Equilibrium For an object to remain in equilibrium, two conditions must be met. The object must have no net force: F v = 0 and no net torque: v τ = 0 Worksheet A uniform rod with a length L and a mass
Equilibrium For an object to remain in equilibrium, two conditions must be met. The object must have no net force: F v = 0 and no net torque: v τ = 0 Worksheet A uniform rod with a length L and a mass
P12 Torque Notes.notebook. March 26, Torques
 Torques The size of a torque depends on two things: 1. The size of the force being applied (a larger force will have a greater effect) 2. The distance away from the pivot point (the further away from this
Torques The size of a torque depends on two things: 1. The size of the force being applied (a larger force will have a greater effect) 2. The distance away from the pivot point (the further away from this
Chapter 10: Dynamics of Rotational Motion
 Chapter 10: Dynamics of Rotational Motion What causes an angular acceleration? The effectiveness of a force at causing a rotation is called torque. QuickCheck 12.5 The four forces shown have the same strength.
Chapter 10: Dynamics of Rotational Motion What causes an angular acceleration? The effectiveness of a force at causing a rotation is called torque. QuickCheck 12.5 The four forces shown have the same strength.
Exam 1--PHYS 151--Chapter 1
 ame: Class: Date: Exam 1--PHYS 151--Chapter 1 True/False Indicate whether the statement is true or false. Select A for True and B for False. 1. The force is a measure of an object s inertia. 2. Newton
ame: Class: Date: Exam 1--PHYS 151--Chapter 1 True/False Indicate whether the statement is true or false. Select A for True and B for False. 1. The force is a measure of an object s inertia. 2. Newton
Phys101 Second Major-173 Zero Version Coordinator: Dr. M. Al-Kuhaili Thursday, August 02, 2018 Page: 1. = 159 kw
 Coordinator: Dr. M. Al-Kuhaili Thursday, August 2, 218 Page: 1 Q1. A car, of mass 23 kg, reaches a speed of 29. m/s in 6.1 s starting from rest. What is the average power used by the engine during the
Coordinator: Dr. M. Al-Kuhaili Thursday, August 2, 218 Page: 1 Q1. A car, of mass 23 kg, reaches a speed of 29. m/s in 6.1 s starting from rest. What is the average power used by the engine during the
General Physics I. Lecture 9: Vector Cross Product. Prof. WAN, Xin ( 万歆 )
") General Physics I Lecture 9: Vector Cross Product Prof. WAN, Xin ( 万歆 ) xinwan@zju.edu.cn http://zimp.zju.edu.cn/~xinwan/ Outline Examples of the rotation of a rigid object about a fixed axis Force/torque
General Physics I Lecture 9: Vector Cross Product Prof. WAN, Xin ( 万歆 ) xinwan@zju.edu.cn http://zimp.zju.edu.cn/~xinwan/ Outline Examples of the rotation of a rigid object about a fixed axis Force/torque
Physics 201 Midterm Exam 3
 Physics 201 Midterm Exam 3 Information and Instructions Student ID Number: Section Number: TA Name: Please fill in all the information above. Please write and bubble your Name and Student Id number on
Physics 201 Midterm Exam 3 Information and Instructions Student ID Number: Section Number: TA Name: Please fill in all the information above. Please write and bubble your Name and Student Id number on