Rotational Mechanics Part II Torque. Pre AP Physics
|
|
|
- Kathryn Banks
- 6 years ago
- Views:
Transcription
1 Rotational Mechanics Part II Torque Pre AP Physics
2 We have so far discussed rotational kinematics the description of rotational motion in terms of angle, angular velocity and angular acceleration. Now we will discuss what causes this rotational motion. When one or more forces act on an object at a location other than the center of mass of an object the object has a tendency to rotate. This rotating effect is TORQUE. DEFINITION OF TORQUE Torque is a vector quantity that measures the tendency of a force to rotate an object about an axis. Torque = (Magnitude of force) (Lever arm)
3 The axis about which the rotation occurs is called the axis of rotation and the point about which the rotation occurs is referred to as a PIVOT POINT. = F l Cross Product = F lsin Torque Magnitude F is the force magnitude and l is called the lever arm (moment arm) and it is the perpendicular distance (d ) from the pivot point to the line of action of the force.
4 Force vector Pivot point Lever arm
5 Line of action of Force vector Lever arm Force vector Pivot point Length
6 Force vector Pivot point length Lever arm Line of action of Force vector
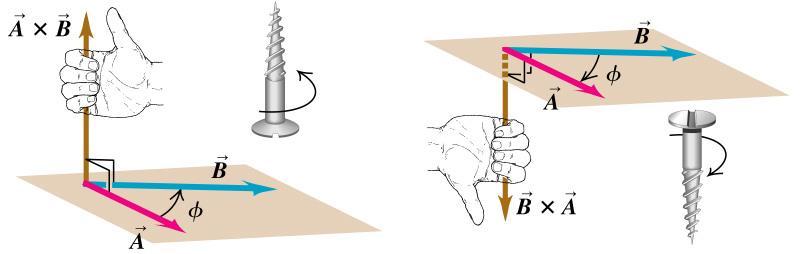
7 Some more important points about torque Engineers will often use the term "moment" to describe what physicists call a "torque". We will adopt a convention that defines torques that tend to cause clockwise rotation as negative and torques that tend to cause counter-clockwise rotation as positive. Torques are always defined relative to a point. It is incorrect to simply say the "torque of F". Instead you must say the "torque of F relative to point X". More general definition for the torque is given by the vector (or cross product). When a force acting at a point which has position vector r relative to an origin O the torque exerted by the force about the origin is defined as r F
8
9 Note that the metric unit of torque is the Newton meter. The English unit of torque is the Foot- pound. (Yes, the units are backward written!) Also remember that another name for a N m is Joule an energy unit. But torque is NOT an energy (scalar) quantity. Torque is a vector quantity. The cross product of two vectors always yields another vector as an answer.
10 Example #1 What is the torque produced by a 10-N force on a rod if the perpendicular distance (torque arm) from the force to the axis of rotation point (pivot point) is 4.5-m? Torque = F d = (10-N) (4.5-m) Torque = 45.0 N-m
11 Example #2 What is the torque produced by the forces F 1, F 2, and F 3 about the pivot point of the beam in the figure below? 30 o F 2 = 100-N Pivot Point 2.5-m F 3 = 250-N 2.0-m 1.0-m F 1 = 50-N (1) T 1 = F 1 d T 1 = (50-N) (1-m) T 1 = 50 N-m
12 30 o F 2 = 100-N Pivot Point 2.5-m F 3 = 250-N (2) 2.0-m T 2 = F 2 d 1.0-m F 1 = 50-N T 2 = (100-N) (? ) 30 o 2-m 100-N 2m Sin 30 o = 1.0-m T 2 = (100-N) (1-m) T 2 = 100 N-m
13 30 o F 2 = 100-N Pivot Point 2.5-m F 3 = 250-N 2.0-m 1.0-m F 1 = 50-N (3) T 3 = F 3 d T 3 = (250-N) (2.5-m) T 3 = 625 N-m
14 Again, torque, like displacement is a vector quantity. However, in our text, torque is treated as a scalar quantity for the purpose of making the concept a little easier to study at first. Having stated that, we still need to look at this rotating force in terms of clockwise or counterclockwise motion For this class let s adopt the following conventions: (1) Clockwise Torque s are considered negative. (2) Counterclockwise Torque s are considered positive. +
15 To determine the sign of the torque, imagine that it is the only torque acting on the object and that the object is free to rotate. If two or more forces are acting on an object then there may be more than one torque acting on the object. In that case you normally find the net torque using the formula: Net = So if we looked at example #2 again our net torque acting on the beam would be:
16 30 o F 2 = 100-N Pivot Point 2.5-m F 3 = 250-N 2.0-m 1.0-m F 1 = 50-N Net = ( 50 N-m) + ( 100 N-m) + (+625 N-m) = +475 N-m Net Or the net torque acting on that beam is 475 N-m counterclockwise.
17 Maintaining Rotational Equilibrium In solving problems that have net forces acting on an object it s important that we look at Newton s second law (F = ma), but we also need to look at the rotational effects (if any) of those forces. In effect if the object is to be in equilibrium (still or moving at constant speed) then the following must exist F x = 0; F y = 0 and T = 0. Now if the net force on an object is zero ( F x = 0; F y = 0), then the object is said to be in translational equilibrium. If the net torque on an object is zero ( T = 0), then the object is in rotational equilibrium. Sometimes this rotational equilibrium statement is called the second condition for equilibrium.
18 Note that in solving problems with the second condition of equilibrium the axis about which the torque is calculated can be arbitrary. Also note that if a force acts along a line passing through the axis of rotation it will not produce any torque. Again please remember the following conventions in the problem solving involving rotational motion (1) Forces upward and to the right are considered positive. (2) Forces downward and to the left are considered negative. (3) Clockwise Torque s are considered negative. (4) Counterclockwise Torque s are considered positive.
19 Example #3 A horizontal rod AB, is 10-m long. It weighs 500-N and its center of gravity, C, is located 3-m to the right of A. At A a force of 1000-N acts straight down. At B a force of 750-N acts straight down. At D, 2-m to the left of B, a force of 400-N acts straight up. At E, 1.0-m to the right of A, a force of 750-N acts straight up. (A) What is the magnitude and direction of the force that must be used to produce equilibrium and (B) what is the location of this force, with respect to point A? A B
20 750-N 400-N 1.0-m E 10-m D 2.0-m A B C? 3.0-m 1000-N 500-N F 750-N (A) In order for the beam to be translational equilibrium, F x = 0; F y = 0. Now there are no horizontal (x-direction) forces, so we need only consider the forces in the y-direction. In order for the forces in the y-direction to be in equilibrium the forces up minus the forces down must equal zero.
21 Or: F + (+750-N) + (+400-N) + ( 1000-N) + ( 500-N) + ( 750-N) = 0 F = N. Notice that the answer is positive. This tells us that the direction we drew the vector-arrow for the unknown force was in the correct direction (B) To find the location of the point of application of this force: (1) Choose a pivot point to calculate the sum of the torques. Since the problem asks for the location with respect to point A choose point A as the location of the pivot point.
22 750-N 400-N 1.0-m E 10-m D 2.0-m A 3.0-m C? 1000-N 500-N F 750-N (2) Calculate the sum of the torques about that chosen pivot point and set equal to zero. Counterclockwise Torque T = 0 (+750 N)(1 m) + ( 500 N)(3 m) + (+1100 N)(?) + (+400 N)(8m) + ( 750 N)(10 m) = 0 Clockwise Torque B
23 Note that for the positive torque (counterclockwise) producing forces you might use a positive sign for the forces and a negative sign for counterclockwise torque producing forces. (3) Solve the resulting equation for the unknown distance.? = 750 N-m 1500 N m 3200N m 7500N m 1100 N? = 4.59-m Note that if you get a negative distance, you just chose the location on the wrong side of the pivot point.
24 Example #4 Andy and Dana were cleaning windows on the outside of the 35 th floor of one of the skyscraper banks in downtown Fort Worth to earn enough spending money for the prom so that they could hear their senior song together one more time. The uniform fifteenmeter long plank they are standing on weighs 700 Newtons and each person weighs exactly 500 Newtons. How much tension, in Newtons, is exerted on each rope if Dana is standing five meters from Andy and Andy is standing seven meters from the center of the plank? (Assume that there is only one rope at each end of the plank.) 5 m 15 m
25 F B F A 7.5 m 15 m 5 m 0.5 m 700 N 500 N 500 N F y = 0 F B 700 N 500 N 500 N + F A = 0 F B = 1700 N F A
26 Choosing point B as the pivot point gives the equation: F B F A 7.5 m 15 m 5 m 0.5 m T = N 500 N 500 N ( 700)(7.5) + ( 500)(9.5) + ( 500)(14.5) + (+F A )(15) = 0 F A = 1,150 N F B = 1,700 N 1,150 N = 550 N
27 Example #5 Josh pushed a 10 cm x 30 cm wooden plank that is 12 meters long out over the ledge of a building that is 50 m tall so that he could sit on the edge of the plank to drop stones and test certain laws of physics. If the plank is uniform and weighs 450 N, how far from the edge of the building, in meters, could Josh sit if he weighs 500 N? 12 m 6? B? 450 N 500 N
28 12 m 6? B? 450 N 500 N F y = 0 F B = 0 F B = 950 N (This is the force that the corner of the building is pushing upward with.) Choosing point B (building corner) as the pivot point gives the equation: T = 0 ( 500)(?) + (+450)(6?) = 0? = 2.84 m
29 Example #6 One day Big Al, who weighs 900 N, was sitting at one end of a seesaw, while Liz, who weighs 550 N, was sitting on the other end up in the air. Along came Mighty Mutt, who weighs 400 N, and seeing their predicament jumps on the middle (fulcrum where the seesaw is balanced) and walks toward Liz until the seesaw is parallel to the ground. If the seesaw is 8 meters long, how far away from Liz is Mighty Mutt, in meters, when all concerned are in equilibrium?
30 ? F Fulcrum 550 N 400 N 900 N F y = 0 F Fulcrum = 0 F Fulcrum = 1850 N Choosing Liz as the pivot point gives the equation: T = 0 ( 400)(?) + (+1850)(4) + ( 900)(8) = 0? = m Note, that by choosing Liz as the pivot point the distance found is the distance needed.
31 Example #7 When Trevor drives his truck unto the scales his front wheels exert a force of 10,000 N. When he drives his truck forward so that the back wheels are now on the scales the scales read 8600 N. If the distance between the front and back wheels is 2.75 m: (A) what is the weight of the truck in Newtons? (B) Where is the center of gravity of the truck with respect to the front wheels?
32 2.75 m CG 8600 N? 10,000 N (A) F y = 0 10,000 N N F CG = 0 F CG = 18,600 N Choosing the front tire as the pivot point: (B) T = 0 (+18,600)(?) + ( 8600)(2.75) = 0? ? = 1.27 m behind the front wheel
33 ? F Fulcrum 550 N 400 N 900 N F y = 0 F Fulcrum = 0 F Fulcrum = 1850 N Choosing Fulcrum as the pivot point gives the equation: T = 0 (+550)(4) + (400)(4?) + ( 900)(4) = (?) 3600 = (?) = 0? = ( 200) ( 400)? = m
Chapter 12 Static Equilibrium
 Chapter Static Equilibrium. Analysis Model: Rigid Body in Equilibrium. More on the Center of Gravity. Examples of Rigid Objects in Static Equilibrium CHAPTER : STATIC EQUILIBRIUM AND ELASTICITY.) The Conditions
Chapter Static Equilibrium. Analysis Model: Rigid Body in Equilibrium. More on the Center of Gravity. Examples of Rigid Objects in Static Equilibrium CHAPTER : STATIC EQUILIBRIUM AND ELASTICITY.) The Conditions
Torque. Objectives. Assessment. Assessment. Equations. Physics terms 6/2/14
 Objectives Calculate torque given the lever arm (perpendicular distance) and the force. Calculate torque in newton meters and in pound feet. Interpret positive and negative signs in the context of torque.
Objectives Calculate torque given the lever arm (perpendicular distance) and the force. Calculate torque in newton meters and in pound feet. Interpret positive and negative signs in the context of torque.
Torque rotational force which causes a change in rotational motion. This force is defined by linear force multiplied by a radius.
 Warm up A remote-controlled car's wheel accelerates at 22.4 rad/s 2. If the wheel begins with an angular speed of 10.8 rad/s, what is the wheel's angular speed after exactly three full turns? AP Physics
Warm up A remote-controlled car's wheel accelerates at 22.4 rad/s 2. If the wheel begins with an angular speed of 10.8 rad/s, what is the wheel's angular speed after exactly three full turns? AP Physics
Recap I. Angular position: Angular displacement: s. Angular velocity: Angular Acceleration:
 Recap I Angular position: Angular displacement: s Angular velocity: Angular Acceleration: Every point on a rotating rigid object has the same angular, but not the same linear motion! Recap II Circular
Recap I Angular position: Angular displacement: s Angular velocity: Angular Acceleration: Every point on a rotating rigid object has the same angular, but not the same linear motion! Recap II Circular
Section 2: Static Equilibrium II- Balancing Torques
 Section 2: Static Equilibrium II- Balancing Torques Last Section: If (ie. Forces up = Forces down and Forces left = Forces right), then the object will have no translatory motion. In other words, the object
Section 2: Static Equilibrium II- Balancing Torques Last Section: If (ie. Forces up = Forces down and Forces left = Forces right), then the object will have no translatory motion. In other words, the object
Unit 4 Statics. Static Equilibrium Translational Forces Torque
 Unit 4 Statics Static Equilibrium Translational Forces Torque 1 Dynamics vs Statics Dynamics: is the study of forces and motion. We study why objects move. Statics: is the study of forces and NO motion.
Unit 4 Statics Static Equilibrium Translational Forces Torque 1 Dynamics vs Statics Dynamics: is the study of forces and motion. We study why objects move. Statics: is the study of forces and NO motion.
Torque. Physics 6A. Prepared by Vince Zaccone For Campus Learning Assistance Services at UCSB
 Physics 6A Torque is what causes angular acceleration (just like a force causes linear acceleration) Torque is what causes angular acceleration (just like a force causes linear acceleration) For a torque
Physics 6A Torque is what causes angular acceleration (just like a force causes linear acceleration) Torque is what causes angular acceleration (just like a force causes linear acceleration) For a torque
Chapter 8 Rotational Motion and Equilibrium. 1. Give explanation of torque in own words after doing balance-the-torques lab as an inquiry introduction
 Chapter 8 Rotational Motion and Equilibrium Name 1. Give explanation of torque in own words after doing balance-the-torques lab as an inquiry introduction 1. The distance between a turning axis and the
Chapter 8 Rotational Motion and Equilibrium Name 1. Give explanation of torque in own words after doing balance-the-torques lab as an inquiry introduction 1. The distance between a turning axis and the
Chapter 5 The Force Vector
 Conceptual Physics/ PEP Name: Date: Chapter 5 The Force Vector Section Review 5.1 1. Indicate whether each of the following units of measurement are scalar or vector units: Speed _scalar time scalar mass
Conceptual Physics/ PEP Name: Date: Chapter 5 The Force Vector Section Review 5.1 1. Indicate whether each of the following units of measurement are scalar or vector units: Speed _scalar time scalar mass
Torques and Static Equilibrium
 Torques and Static Equilibrium INTRODUCTION Archimedes, Greek mathematician, physicist, engineer, inventor and astronomer, was widely regarded as the leading scientist of the ancient world. He made a study
Torques and Static Equilibrium INTRODUCTION Archimedes, Greek mathematician, physicist, engineer, inventor and astronomer, was widely regarded as the leading scientist of the ancient world. He made a study
is the study of and. We study objects. is the study of and. We study objects.
 Static Equilibrium Translational Forces Torque Unit 4 Statics Dynamics vs Statics is the study of and. We study objects. is the study of and. We study objects. Recall Newton s First Law All objects remain
Static Equilibrium Translational Forces Torque Unit 4 Statics Dynamics vs Statics is the study of and. We study objects. is the study of and. We study objects. Recall Newton s First Law All objects remain
AP Physics Multiple Choice Practice Torque
 AP Physics Multiple Choice Practice Torque 1. A uniform meterstick of mass 0.20 kg is pivoted at the 40 cm mark. Where should one hang a mass of 0.50 kg to balance the stick? (A) 16 cm (B) 36 cm (C) 44
AP Physics Multiple Choice Practice Torque 1. A uniform meterstick of mass 0.20 kg is pivoted at the 40 cm mark. Where should one hang a mass of 0.50 kg to balance the stick? (A) 16 cm (B) 36 cm (C) 44
Chapter 8 - Rotational Dynamics and Equilibrium REVIEW
 Pagpalain ka! (Good luck, in Filipino) Date Chapter 8 - Rotational Dynamics and Equilibrium REVIEW TRUE/FALSE. Write 'T' if the statement is true and 'F' if the statement is false. 1) When a rigid body
Pagpalain ka! (Good luck, in Filipino) Date Chapter 8 - Rotational Dynamics and Equilibrium REVIEW TRUE/FALSE. Write 'T' if the statement is true and 'F' if the statement is false. 1) When a rigid body
Section 2: Static Equilibrium II- Balancing Torques
 Section 2: Static Equilibrium II- Balancing Torques Last Section: If (ie. Forces up = Forces down and Forces left = Forces right), then the object will have no translatory motion. In other words, the object
Section 2: Static Equilibrium II- Balancing Torques Last Section: If (ie. Forces up = Forces down and Forces left = Forces right), then the object will have no translatory motion. In other words, the object
( )( ) ( )( ) Fall 2017 PHYS 131 Week 9 Recitation: Chapter 9: 5, 10, 12, 13, 31, 34
( ) ( )( ) Fall 2017 PHYS 131 Week 9 Recitation: Chapter 9: 5, 10, 12, 13, 31, 34") Fall 07 PHYS 3 Chapter 9: 5, 0,, 3, 3, 34 5. ssm The drawing shows a jet engine suspended beneath the wing of an airplane. The weight W of the engine is 0 00 N and acts as shown in the drawing. In flight
Fall 07 PHYS 3 Chapter 9: 5, 0,, 3, 3, 34 5. ssm The drawing shows a jet engine suspended beneath the wing of an airplane. The weight W of the engine is 0 00 N and acts as shown in the drawing. In flight
use one of the methods to compute the magnitude of the torque, given the magnitudes of the force and position vector
 PH2213 : Examples from Chapter 12 : Static Equilibrium Equilibrium represents the condition where an object is not accelerating (either linearly or angularly). It can still be moving (and rotating), it
PH2213 : Examples from Chapter 12 : Static Equilibrium Equilibrium represents the condition where an object is not accelerating (either linearly or angularly). It can still be moving (and rotating), it
Equilibrium and Torque
 Equilibrium and Torque Equilibrium An object is in Equilibrium when: 1. There is no net force acting on the object 2. There is no net Torque In other words, the object is NOT experiencing linear acceleration
Equilibrium and Torque Equilibrium An object is in Equilibrium when: 1. There is no net force acting on the object 2. There is no net Torque In other words, the object is NOT experiencing linear acceleration
Chapter 9 Rotational Dynamics
 Chapter 9 ROTATIONAL DYNAMICS PREVIEW A force acting at a perpendicular distance from a rotation point, such as pushing a doorknob and causing the door to rotate on its hinges, produces a torque. If the
Chapter 9 ROTATIONAL DYNAMICS PREVIEW A force acting at a perpendicular distance from a rotation point, such as pushing a doorknob and causing the door to rotate on its hinges, produces a torque. If the
PHYSICS - CLUTCH CH 13: ROTATIONAL EQUILIBRIUM.
 !! www.clutchprep.com EXAMPLE: POSITION OF SECOND KID ON SEESAW EXAMPLE: A 4 m-long seesaw 50 kg in mass and of uniform mass distribution is pivoted on a fulcrum at its middle, as shown. Two kids sit on
!! www.clutchprep.com EXAMPLE: POSITION OF SECOND KID ON SEESAW EXAMPLE: A 4 m-long seesaw 50 kg in mass and of uniform mass distribution is pivoted on a fulcrum at its middle, as shown. Two kids sit on
Equilibrium Notes 1 Translational Equilibrium
 Equilibrium Notes 1 Translational Equilibrium Ex. A 20.0 kg object is suspended by a rope as shown. What is the net force acting on it? Ex. Ok that was easy, now that same 20.0 kg object is lifted at a
Equilibrium Notes 1 Translational Equilibrium Ex. A 20.0 kg object is suspended by a rope as shown. What is the net force acting on it? Ex. Ok that was easy, now that same 20.0 kg object is lifted at a
When the applied force is not perpendicular to the crowbar, for example, the lever arm is found by drawing the perpendicular line from the fulcrum to
 When the applied force is not perpendicular to the crowbar, for example, the lever arm is found by drawing the perpendicular line from the fulcrum to the line of action of the force. We call torques that
When the applied force is not perpendicular to the crowbar, for example, the lever arm is found by drawing the perpendicular line from the fulcrum to the line of action of the force. We call torques that
Rotational Equilibrium
 Rotational Equilibrium In this laboratory, we study the conditions for static equilibrium. Axis Through the Center of Gravity Suspend the meter stick at its center of gravity, with its numbers increasing
Rotational Equilibrium In this laboratory, we study the conditions for static equilibrium. Axis Through the Center of Gravity Suspend the meter stick at its center of gravity, with its numbers increasing
Please read this introductory material carefully; it covers topics you might not yet have seen in class.
 b Lab Physics 211 Lab 10 Torque What You Need To Know: Please read this introductory material carefully; it covers topics you might not yet have seen in class. F (a) (b) FIGURE 1 Forces acting on an object
b Lab Physics 211 Lab 10 Torque What You Need To Know: Please read this introductory material carefully; it covers topics you might not yet have seen in class. F (a) (b) FIGURE 1 Forces acting on an object
Physics 111. Lecture 22 (Walker: ) Torque Rotational Dynamics Static Equilibrium Oct. 28, 2009
 Torque Rotational Dynamics Static Equilibrium Oct. 28, 2009") Physics 111 Lecture 22 (Walker: 11.1-3) Torque Rotational Dynamics Static Equilibrium Oct. 28, 2009 Lecture 22 1/26 Torque (τ) We define a quantity called torque which is a measure of twisting effort.
Physics 111 Lecture 22 (Walker: 11.1-3) Torque Rotational Dynamics Static Equilibrium Oct. 28, 2009 Lecture 22 1/26 Torque (τ) We define a quantity called torque which is a measure of twisting effort.
Announcements Oct 16, 2014
 Announcements Oct 16, 2014 1. Prayer 2. While waiting, see how many of these blanks you can fill out: Centripetal Accel.: Causes change in It points but not Magnitude: a c = How to use with N2: Always
Announcements Oct 16, 2014 1. Prayer 2. While waiting, see how many of these blanks you can fill out: Centripetal Accel.: Causes change in It points but not Magnitude: a c = How to use with N2: Always
Chapter 8. Centripetal Force and The Law of Gravity
 Chapter 8 Centripetal Force and The Law of Gravity Centripetal Acceleration An object traveling in a circle, even though it moves with a constant speed, will have an acceleration The centripetal acceleration
Chapter 8 Centripetal Force and The Law of Gravity Centripetal Acceleration An object traveling in a circle, even though it moves with a constant speed, will have an acceleration The centripetal acceleration
Physics 53 Exam 3 November 3, 2010 Dr. Alward
 1. When the speed of a rear-drive car (a car that's driven forward by the rear wheels alone) is increasing on a horizontal road the direction of the frictional force on the tires is: A) forward for all
1. When the speed of a rear-drive car (a car that's driven forward by the rear wheels alone) is increasing on a horizontal road the direction of the frictional force on the tires is: A) forward for all
Rotational Kinetic Energy
 Lecture 17, Chapter 10: Rotational Energy and Angular Momentum 1 Rotational Kinetic Energy Consider a rigid body rotating with an angular velocity ω about an axis. Clearly every point in the rigid body
Lecture 17, Chapter 10: Rotational Energy and Angular Momentum 1 Rotational Kinetic Energy Consider a rigid body rotating with an angular velocity ω about an axis. Clearly every point in the rigid body
Static equilibrium. Objectives. Physics terms. Assessment. Brainstorm. Equations 6/3/14
 Static equilibrium Objectives State the conditions of static equilibrium in terms of forces and torques. Draw a free-body diagram of a lever showing all forces. Use the condition of equilibrium to solve
Static equilibrium Objectives State the conditions of static equilibrium in terms of forces and torques. Draw a free-body diagram of a lever showing all forces. Use the condition of equilibrium to solve
Force in Mechanical Systems. Overview
 Force in Mechanical Systems Overview Force in Mechanical Systems What is a force? Created by a push/pull How is a force transmitted? For example by: Chains and sprockets Belts and wheels Spur gears Rods
Force in Mechanical Systems Overview Force in Mechanical Systems What is a force? Created by a push/pull How is a force transmitted? For example by: Chains and sprockets Belts and wheels Spur gears Rods
Science Olympiad. Machines. Roger Demos
 Science Olympiad Machines. Roger Demos Some Basic Physics Concepts What do Machines do? Do they allow one to do more work? Not really, at best they make completing a task easier. So then what do Machines
Science Olympiad Machines. Roger Demos Some Basic Physics Concepts What do Machines do? Do they allow one to do more work? Not really, at best they make completing a task easier. So then what do Machines
Physics 8 Friday, November 4, 2011
 Physics 8 Friday, November 4, 2011 Please turn in Homework 7. I will hand out solutions once everyone is here. The handout also includes HW8 and a page or two of updates to the equation sheet needed to
Physics 8 Friday, November 4, 2011 Please turn in Homework 7. I will hand out solutions once everyone is here. The handout also includes HW8 and a page or two of updates to the equation sheet needed to
Chapter 9: Rotational Dynamics Tuesday, September 17, 2013
 Chapter 9: Rotational Dynamics Tuesday, September 17, 2013 10:00 PM The fundamental idea of Newtonian dynamics is that "things happen for a reason;" to be more specific, there is no need to explain rest
Chapter 9: Rotational Dynamics Tuesday, September 17, 2013 10:00 PM The fundamental idea of Newtonian dynamics is that "things happen for a reason;" to be more specific, there is no need to explain rest
Equilibrium Notes 1 Translational Equilibrium
 Equilibrium Notes 1 Translational Equilibrium A 20.0 kg object is suspended by a rope as shown. What is the net force acting on it? Ok that was easy, now that same 20.0 kg object is lifted at a velocity
Equilibrium Notes 1 Translational Equilibrium A 20.0 kg object is suspended by a rope as shown. What is the net force acting on it? Ok that was easy, now that same 20.0 kg object is lifted at a velocity
Chapter 9 TORQUE & Rotational Kinematics
 Chapter 9 TORQUE & Rotational Kinematics This motionless person is in static equilibrium. The forces acting on him add up to zero. Both forces are vertical in this case. This car is in dynamic equilibrium
Chapter 9 TORQUE & Rotational Kinematics This motionless person is in static equilibrium. The forces acting on him add up to zero. Both forces are vertical in this case. This car is in dynamic equilibrium
Big Idea 4: Interactions between systems can result in changes in those systems. Essential Knowledge 4.D.1: Torque, angular velocity, angular
 Unit 7: Rotational Motion (angular kinematics, dynamics, momentum & energy) Name: Big Idea 3: The interactions of an object with other objects can be described by forces. Essential Knowledge 3.F.1: Only
Unit 7: Rotational Motion (angular kinematics, dynamics, momentum & energy) Name: Big Idea 3: The interactions of an object with other objects can be described by forces. Essential Knowledge 3.F.1: Only
Forces and Newton s Laws Notes
 Forces and Newton s Laws Notes Force An action exerted on an object which can change the motion of the object. The SI unit for force is the Newton (N) o N = (kg m)/s 2 o Pound is also a measure of force
Forces and Newton s Laws Notes Force An action exerted on an object which can change the motion of the object. The SI unit for force is the Newton (N) o N = (kg m)/s 2 o Pound is also a measure of force
Simple Machines. Bởi: OpenStaxCollege
 F Simple Machines Simple Machines Bởi: OpenStaxCollege Simple machines are devices that can be used to multiply or augment a force that we apply often at the expense of a distance through which we apply
F Simple Machines Simple Machines Bởi: OpenStaxCollege Simple machines are devices that can be used to multiply or augment a force that we apply often at the expense of a distance through which we apply
Rotational Dynamics continued
 Chapter 9 Rotational Dynamics continued 9.1 The Action of Forces and Torques on Rigid Objects Chapter 8 developed the concepts of angular motion. θ : angles and radian measure for angular variables ω :
Chapter 9 Rotational Dynamics continued 9.1 The Action of Forces and Torques on Rigid Objects Chapter 8 developed the concepts of angular motion. θ : angles and radian measure for angular variables ω :
Forces and Newton s Laws Reading Notes. Give an example of a force you have experienced continuously all your life.
 Forces and Newton s Laws Reading Notes Name: Section 4-1: Force What is force? Give an example of a force you have experienced continuously all your life. Give an example of a situation where an object
Forces and Newton s Laws Reading Notes Name: Section 4-1: Force What is force? Give an example of a force you have experienced continuously all your life. Give an example of a situation where an object
Chapter 11 Rotational Dynamics and Static Equilibrium. Copyright 2010 Pearson Education, Inc.
 Chapter 11 Rotational Dynamics and Static Equilibrium Units of Chapter 11 Torque Torque and Angular Acceleration Zero Torque and Static Equilibrium Center of Mass and Balance Dynamic Applications of Torque
Chapter 11 Rotational Dynamics and Static Equilibrium Units of Chapter 11 Torque Torque and Angular Acceleration Zero Torque and Static Equilibrium Center of Mass and Balance Dynamic Applications of Torque
TORQUE Diandra Leslie-Pelecky Edited by Anne Starace
 TORQUE Diandra Leslie-Pelecky Edited by Anne Starace Abstract: As you may have noticed, it is much more difficult to hold an object at arm s length than close to your body and door handles are placed on
TORQUE Diandra Leslie-Pelecky Edited by Anne Starace Abstract: As you may have noticed, it is much more difficult to hold an object at arm s length than close to your body and door handles are placed on
Definition. is a measure of how much a force acting on an object causes that object to rotate, symbol is, (Greek letter tau)
") Torque Definition is a measure of how much a force acting on an object causes that object to rotate, symbol is, (Greek letter tau) = r F = rfsin, r = distance from pivot to force, F is the applied force
Torque Definition is a measure of how much a force acting on an object causes that object to rotate, symbol is, (Greek letter tau) = r F = rfsin, r = distance from pivot to force, F is the applied force
Chapter 8. Rotational Equilibrium and Rotational Dynamics
 Chapter 8 Rotational Equilibrium and Rotational Dynamics Force vs. Torque Forces cause accelerations Torques cause angular accelerations Force and torque are related Torque The door is free to rotate about
Chapter 8 Rotational Equilibrium and Rotational Dynamics Force vs. Torque Forces cause accelerations Torques cause angular accelerations Force and torque are related Torque The door is free to rotate about
3. A bicycle tire of radius 0.33 m and a mass 1.5 kg is rotating at 98.7 rad/s. What torque is necessary to stop the tire in 2.0 s?
 Practice 8A Torque 1. Find the torque produced by a 3.0 N force applied at an angle of 60.0 to a door 0.25 m from the hinge. What is the maximum torque this force could exert? 2. If the torque required
Practice 8A Torque 1. Find the torque produced by a 3.0 N force applied at an angle of 60.0 to a door 0.25 m from the hinge. What is the maximum torque this force could exert? 2. If the torque required
Kinematics and Dynamics
 AP PHYS 1 Test Review Kinematics and Dynamics Name: Other Useful Site: http://www.aplusphysics.com/ap1/ap1- supp.html 2015-16 AP Physics: Kinematics Study Guide The study guide will help you review all
AP PHYS 1 Test Review Kinematics and Dynamics Name: Other Useful Site: http://www.aplusphysics.com/ap1/ap1- supp.html 2015-16 AP Physics: Kinematics Study Guide The study guide will help you review all
Exam 1--PHYS 151--Chapter 1
 ame: Class: Date: Exam 1--PHYS 151--Chapter 1 True/False Indicate whether the statement is true or false. Select A for True and B for False. 1. The force is a measure of an object s inertia. 2. Newton
ame: Class: Date: Exam 1--PHYS 151--Chapter 1 True/False Indicate whether the statement is true or false. Select A for True and B for False. 1. The force is a measure of an object s inertia. 2. Newton
Application of Forces. Chapter Eight. Torque. Force vs. Torque. Torque, cont. Direction of Torque 4/7/2015
 Raymond A. Serway Chris Vuille Chapter Eight Rotational Equilibrium and Rotational Dynamics Application of Forces The point of application of a force is important This was ignored in treating objects as
Raymond A. Serway Chris Vuille Chapter Eight Rotational Equilibrium and Rotational Dynamics Application of Forces The point of application of a force is important This was ignored in treating objects as
Equilibrium and Torque
 Equilibrium and Torque Equilibrium An object is in Equilibrium when: 1. There is no net force acting on the object 2. There is no net Torque (we ll get to this later) In other words, the object is NOT
Equilibrium and Torque Equilibrium An object is in Equilibrium when: 1. There is no net force acting on the object 2. There is no net Torque (we ll get to this later) In other words, the object is NOT
Vector Mechanics: Statics
 PDHOnline Course G492 (4 PDH) Vector Mechanics: Statics Mark A. Strain, P.E. 2014 PDH Online PDH Center 5272 Meadow Estates Drive Fairfax, VA 22030-6658 Phone & Fax: 703-988-0088 www.pdhonline.org www.pdhcenter.com
PDHOnline Course G492 (4 PDH) Vector Mechanics: Statics Mark A. Strain, P.E. 2014 PDH Online PDH Center 5272 Meadow Estates Drive Fairfax, VA 22030-6658 Phone & Fax: 703-988-0088 www.pdhonline.org www.pdhcenter.com
Chapter 2 Mechanical Equilibrium
 Chapter 2 Mechanical Equilibrium I. Force (2.1) A. force is a push or pull 1. A force is needed to change an object s state of motion 2. State of motion may be one of two things a. At rest b. Moving uniformly
Chapter 2 Mechanical Equilibrium I. Force (2.1) A. force is a push or pull 1. A force is needed to change an object s state of motion 2. State of motion may be one of two things a. At rest b. Moving uniformly
Torque and Rotational Equilibrium
 Torque and Rotational Equilibrium Theory Torque is the rotational analog of force. If you want something to move (translate), you apply a force; if you want something to rotate, you apply a torque. Torque
Torque and Rotational Equilibrium Theory Torque is the rotational analog of force. If you want something to move (translate), you apply a force; if you want something to rotate, you apply a torque. Torque
Torque and Rotational Equilibrium
 Torque and Rotational Equilibrium Name Section Theory Torque is the rotational analog of force. If you want something to move (translate), you apply a force; if you want something to rotate, you apply
Torque and Rotational Equilibrium Name Section Theory Torque is the rotational analog of force. If you want something to move (translate), you apply a force; if you want something to rotate, you apply
Chapter 8 Rotational Motion and Dynamics Reading Notes
 Name: Chapter 8 Rotational Motion and Dynamics Reading Notes Section 8-1: Angular quantities A circle can be split into pieces called degrees. There are 360 degrees in a circle. A circle can be split into
Name: Chapter 8 Rotational Motion and Dynamics Reading Notes Section 8-1: Angular quantities A circle can be split into pieces called degrees. There are 360 degrees in a circle. A circle can be split into
Rotational Equilibrium
 Rotational Equilibrium 6-1 Rotational Equilibrium INTRODUCTION Have you ever tried to pull a stubborn nail out of a board or develop your forearm muscles by lifting weights? Both these activities involve
Rotational Equilibrium 6-1 Rotational Equilibrium INTRODUCTION Have you ever tried to pull a stubborn nail out of a board or develop your forearm muscles by lifting weights? Both these activities involve
EQUILIBRIUM OBJECTIVES PRE-LECTURE
 27 FE3 EQUILIBRIUM Aims OBJECTIVES In this chapter you will learn the concepts and principles needed to understand mechanical equilibrium. You should be able to demonstrate your understanding by analysing
27 FE3 EQUILIBRIUM Aims OBJECTIVES In this chapter you will learn the concepts and principles needed to understand mechanical equilibrium. You should be able to demonstrate your understanding by analysing
2008 FXA THREE FORCES IN EQUILIBRIUM 1. Candidates should be able to : TRIANGLE OF FORCES RULE
 THREE ORCES IN EQUILIBRIUM 1 Candidates should be able to : TRIANGLE O ORCES RULE Draw and use a triangle of forces to represent the equilibrium of three forces acting at a point in an object. State that
THREE ORCES IN EQUILIBRIUM 1 Candidates should be able to : TRIANGLE O ORCES RULE Draw and use a triangle of forces to represent the equilibrium of three forces acting at a point in an object. State that
Chapter 8. Rotational Kinematics
 Chapter 8 Rotational Kinematics 8.3 The Equations of Rotational Kinematics 8.4 Angular Variables and Tangential Variables The relationship between the (tangential) arc length, s, at some radius, r, and
Chapter 8 Rotational Kinematics 8.3 The Equations of Rotational Kinematics 8.4 Angular Variables and Tangential Variables The relationship between the (tangential) arc length, s, at some radius, r, and
Rotational Kinematics
 Rotational Kinematics Rotational Coordinates Ridged objects require six numbers to describe their position and orientation: 3 coordinates 3 axes of rotation Rotational Coordinates Use an angle θ to describe
Rotational Kinematics Rotational Coordinates Ridged objects require six numbers to describe their position and orientation: 3 coordinates 3 axes of rotation Rotational Coordinates Use an angle θ to describe
Torque and Static Equilibrium
 Torque and Static Equilibrium Rigid Bodies Rigid body: An extended object in which the distance between any two points in the object is constant in time. Examples: sphere, disk Effect of external forces
Torque and Static Equilibrium Rigid Bodies Rigid body: An extended object in which the distance between any two points in the object is constant in time. Examples: sphere, disk Effect of external forces
Lecture 8. Torque. and Equilibrium. Pre-reading: KJF 8.1 and 8.2
 Lecture 8 Torque and Equilibrium Pre-reading: KJF 8.1 and 8.2 Archimedes Lever Rule At equilibrium (and with forces 90 to lever): r 1 F 1 = r 2 F 2 2 General Lever Rule For general angles r 1 F 1 sin θ
Lecture 8 Torque and Equilibrium Pre-reading: KJF 8.1 and 8.2 Archimedes Lever Rule At equilibrium (and with forces 90 to lever): r 1 F 1 = r 2 F 2 2 General Lever Rule For general angles r 1 F 1 sin θ
Unit 1: Mechanical Equilibrium
 Unit 1: Mechanical Equilibrium Chapter: Two Mechanical Equilibrium Big Idea / Key Concepts Student Outcomes 2.1: Force 2.2: Mechanical Equilibrium 2.3: Support Force 2.4: Equilibrium for Moving Objects
Unit 1: Mechanical Equilibrium Chapter: Two Mechanical Equilibrium Big Idea / Key Concepts Student Outcomes 2.1: Force 2.2: Mechanical Equilibrium 2.3: Support Force 2.4: Equilibrium for Moving Objects
HATZIC SECONDARY SCHOOL
 HATZIC SECONDARY SCHOOL PROVINCIAL EXAMINATION ASSIGNMENT STATIC EQUILIBRIUM MULTIPLE CHOICE / 33 OPEN ENDED / 80 TOTAL / 113 NAME: 1. State the condition for translational equilibrium. A. ΣF = 0 B. ΣF
HATZIC SECONDARY SCHOOL PROVINCIAL EXAMINATION ASSIGNMENT STATIC EQUILIBRIUM MULTIPLE CHOICE / 33 OPEN ENDED / 80 TOTAL / 113 NAME: 1. State the condition for translational equilibrium. A. ΣF = 0 B. ΣF
Consider two students pushing with equal force on opposite sides of a desk. Looking top-down on the desk:
 1 Bodies in Equilibrium Recall Newton's First Law: if there is no unbalanced force on a body (i.e. if F Net = 0), the body is in equilibrium. That is, if a body is in equilibrium, then all the forces on
1 Bodies in Equilibrium Recall Newton's First Law: if there is no unbalanced force on a body (i.e. if F Net = 0), the body is in equilibrium. That is, if a body is in equilibrium, then all the forces on
Q2. A book whose mass is 2 kg rests on a table. Find the magnitude of the force exerted by the table on the book.
 AP Physics 1- Dynamics Practice Problems FACT: Inertia is the tendency of an object to resist a change in state of motion. A change in state of motion means a change in an object s velocity, therefore
AP Physics 1- Dynamics Practice Problems FACT: Inertia is the tendency of an object to resist a change in state of motion. A change in state of motion means a change in an object s velocity, therefore
Physics A - PHY 2048C
 Physics A - PHY 2048C and 11/15/2017 My Office Hours: Thursday 2:00-3:00 PM 212 Keen Building Warm-up Questions 1 Did you read Chapter 12 in the textbook on? 2 Must an object be rotating to have a moment
Physics A - PHY 2048C and 11/15/2017 My Office Hours: Thursday 2:00-3:00 PM 212 Keen Building Warm-up Questions 1 Did you read Chapter 12 in the textbook on? 2 Must an object be rotating to have a moment
Moments and Torques. M = F d
 Moments and Torques When a force is applied to an object, the object reacts in six possible ways. It can elongate, compress, translate (moves left, right, up, down, etc.), bend, twist or rotate. The study
Moments and Torques When a force is applied to an object, the object reacts in six possible ways. It can elongate, compress, translate (moves left, right, up, down, etc.), bend, twist or rotate. The study
Review for 3 rd Midterm
 Review for 3 rd Midterm Midterm is on 4/19 at 7:30pm in the same rooms as before You are allowed one double sided sheet of paper with any handwritten notes you like. The moment-of-inertia about the center-of-mass
Review for 3 rd Midterm Midterm is on 4/19 at 7:30pm in the same rooms as before You are allowed one double sided sheet of paper with any handwritten notes you like. The moment-of-inertia about the center-of-mass
4.0 m s 2. 2 A submarine descends vertically at constant velocity. The three forces acting on the submarine are viscous drag, upthrust and weight.
 1 1 wooden block of mass 0.60 kg is on a rough horizontal surface. force of 12 N is applied to the block and it accelerates at 4.0 m s 2. wooden block 4.0 m s 2 12 N hat is the magnitude of the frictional
1 1 wooden block of mass 0.60 kg is on a rough horizontal surface. force of 12 N is applied to the block and it accelerates at 4.0 m s 2. wooden block 4.0 m s 2 12 N hat is the magnitude of the frictional
Unit 1: Equilibrium and Center of Mass
 Unit 1: Equilibrium and Center of Mass FORCES What is a force? Forces are a result of the interaction between two objects. They push things, pull things, keep things together, pull things apart. It s really
Unit 1: Equilibrium and Center of Mass FORCES What is a force? Forces are a result of the interaction between two objects. They push things, pull things, keep things together, pull things apart. It s really
STATIC EQUILIBRIUM. Purpose
 Purpose Theory STATIC EQUILIBRIUM a. To understand torque by experimentally measuring and manipulating them. b. To determine static equilibrium conditions by different torques that operate on a system.
Purpose Theory STATIC EQUILIBRIUM a. To understand torque by experimentally measuring and manipulating them. b. To determine static equilibrium conditions by different torques that operate on a system.
Contents. Concept Map
 Contents 1. General Notes on Forces 2. Effects of Forces on Motion 3. Effects of Forces on Shape 4. The Turning Effect of Forces 5. The Centre of Gravity and Stability Concept Map April 2000 Forces - 1
Contents 1. General Notes on Forces 2. Effects of Forces on Motion 3. Effects of Forces on Shape 4. The Turning Effect of Forces 5. The Centre of Gravity and Stability Concept Map April 2000 Forces - 1
AP Physics I Summer Work
 AP Physics I Summer Work 2018 (20 points) Please complete the following set of questions and word problems. Answers will be reviewed in depth during the first week of class followed by an assessment based
AP Physics I Summer Work 2018 (20 points) Please complete the following set of questions and word problems. Answers will be reviewed in depth during the first week of class followed by an assessment based
Chapter 8. Rotational Motion
 Chapter 8 Rotational Motion The Action of Forces and Torques on Rigid Objects In pure translational motion, all points on an object travel on parallel paths. The most general motion is a combination of
Chapter 8 Rotational Motion The Action of Forces and Torques on Rigid Objects In pure translational motion, all points on an object travel on parallel paths. The most general motion is a combination of
Chapter 1: The Prime Movers
 What is force? Chapter 1: The Prime Movers Force is a push or pull. It is a vector, meaning that it has a magnitude and direction. A vector is a physical quantity that has both magnitude and direction
What is force? Chapter 1: The Prime Movers Force is a push or pull. It is a vector, meaning that it has a magnitude and direction. A vector is a physical quantity that has both magnitude and direction
Static Equilibrium and Torque
 10.3 Static Equilibrium and Torque SECTION OUTCOMES Use vector analysis in two dimensions for systems involving static equilibrium and torques. Apply static torques to structures such as seesaws and bridges.
10.3 Static Equilibrium and Torque SECTION OUTCOMES Use vector analysis in two dimensions for systems involving static equilibrium and torques. Apply static torques to structures such as seesaws and bridges.
Dynamics; Newton s Laws of Motion
 Dynamics; Newton s Laws of Motion Force A force is any kind of push or pull on an object. An object at rest needs a force to get it moving; a moving object needs a force to change its velocity. The magnitude
Dynamics; Newton s Laws of Motion Force A force is any kind of push or pull on an object. An object at rest needs a force to get it moving; a moving object needs a force to change its velocity. The magnitude
Phys 1401: General Physics I
 1. (0 Points) What course is this? a. PHYS 1401 b. PHYS 1402 c. PHYS 2425 d. PHYS 2426 2. (0 Points) Which exam is this? a. Exam 1 b. Exam 2 c. Final Exam 3. (0 Points) What version of the exam is this?
1. (0 Points) What course is this? a. PHYS 1401 b. PHYS 1402 c. PHYS 2425 d. PHYS 2426 2. (0 Points) Which exam is this? a. Exam 1 b. Exam 2 c. Final Exam 3. (0 Points) What version of the exam is this?
Physics. Chapter 8 Rotational Motion
 Physics Chapter 8 Rotational Motion Circular Motion Tangential Speed The linear speed of something moving along a circular path. Symbol is the usual v and units are m/s Rotational Speed Number of revolutions
Physics Chapter 8 Rotational Motion Circular Motion Tangential Speed The linear speed of something moving along a circular path. Symbol is the usual v and units are m/s Rotational Speed Number of revolutions
9/20/11. Physics 101 Tuesday 9/20/11 Class 8" Chapter " Weight and Normal forces" Frictional Forces"
 Reading Quiz Physics 101 Tuesday 9/20/11 Class 8" Chapter 5.6 6.1" Weight and Normal forces" Frictional Forces" The force due to kinetic friction is usually larger than the force due to static friction.
Reading Quiz Physics 101 Tuesday 9/20/11 Class 8" Chapter 5.6 6.1" Weight and Normal forces" Frictional Forces" The force due to kinetic friction is usually larger than the force due to static friction.
Chapter 8 continued. Rotational Dynamics
 Chapter 8 continued Rotational Dynamics 8.4 Rotational Work and Energy Work to accelerate a mass rotating it by angle φ F W = F(cosθ)x x = s = rφ = Frφ Fr = τ (torque) = τφ r φ s F to s θ = 0 DEFINITION
Chapter 8 continued Rotational Dynamics 8.4 Rotational Work and Energy Work to accelerate a mass rotating it by angle φ F W = F(cosθ)x x = s = rφ = Frφ Fr = τ (torque) = τφ r φ s F to s θ = 0 DEFINITION
Today we applied our knowledge of vectors to different kinds of problems.
 DAY 18 Summary of Primary Topics Covered Center of Mass and More Vector Examples Today we applied our knowledge of vectors to different kinds of problems. Working these problems is a matter of taking concepts
DAY 18 Summary of Primary Topics Covered Center of Mass and More Vector Examples Today we applied our knowledge of vectors to different kinds of problems. Working these problems is a matter of taking concepts
Chapter 8. Rotational Equilibrium and Rotational Dynamics. 1. Torque. 2. Torque and Equilibrium. 3. Center of Mass and Center of Gravity
 Chapter 8 Rotational Equilibrium and Rotational Dynamics 1. Torque 2. Torque and Equilibrium 3. Center of Mass and Center of Gravity 4. Torque and angular acceleration 5. Rotational Kinetic energy 6. Angular
Chapter 8 Rotational Equilibrium and Rotational Dynamics 1. Torque 2. Torque and Equilibrium 3. Center of Mass and Center of Gravity 4. Torque and angular acceleration 5. Rotational Kinetic energy 6. Angular
11-2 A General Method, and Rolling without Slipping
 11-2 A General Method, and Rolling without Slipping Let s begin by summarizing a general method for analyzing situations involving Newton s Second Law for Rotation, such as the situation in Exploration
11-2 A General Method, and Rolling without Slipping Let s begin by summarizing a general method for analyzing situations involving Newton s Second Law for Rotation, such as the situation in Exploration
 AP Physics 1- Torque, Rotational Inertia, and Angular Momentum Practice Problems FACT: The center of mass of a system of objects obeys Newton s second law- F = Ma cm. Usually the location of the center
AP Physics 1- Torque, Rotational Inertia, and Angular Momentum Practice Problems FACT: The center of mass of a system of objects obeys Newton s second law- F = Ma cm. Usually the location of the center
Chapter 9. Rotational Dynamics
 Chapter 9 Rotational Dynamics In pure translational motion, all points on an object travel on parallel paths. The most general motion is a combination of translation and rotation. 1) Torque Produces angular
Chapter 9 Rotational Dynamics In pure translational motion, all points on an object travel on parallel paths. The most general motion is a combination of translation and rotation. 1) Torque Produces angular
Center of Mass. A baseball thrown into the air follows a smooth parabolic path. A baseball bat thrown into the air does not follow a smooth path.
 Center of Mass A baseball thrown into the air follows a smooth parabolic path. A baseball bat thrown into the air does not follow a smooth path. The bat wobbles about a special point. This point stays
Center of Mass A baseball thrown into the air follows a smooth parabolic path. A baseball bat thrown into the air does not follow a smooth path. The bat wobbles about a special point. This point stays
Lecture 14. Rotational dynamics Torque. Give me a lever long enough and a fulcrum on which to place it, and I shall move the world.
 Lecture 14 Rotational dynamics Torque Give me a lever long enough and a fulcrum on which to place it, and I shall move the world. Archimedes, 87 1 BC EXAM Tuesday March 6, 018 8:15 PM 9:45 PM Today s Topics:
Lecture 14 Rotational dynamics Torque Give me a lever long enough and a fulcrum on which to place it, and I shall move the world. Archimedes, 87 1 BC EXAM Tuesday March 6, 018 8:15 PM 9:45 PM Today s Topics:
Chapter 4 Force and Motion
 Chapter 4 Force and Motion Units of Chapter 4 The Concepts of Force and Net Force Inertia and Newton s First Law of Motion Newton s Second Law of Motion Newton s Third Law of Motion More on Newton s Laws:
Chapter 4 Force and Motion Units of Chapter 4 The Concepts of Force and Net Force Inertia and Newton s First Law of Motion Newton s Second Law of Motion Newton s Third Law of Motion More on Newton s Laws:
Moments of forces. Rudolf arnheim
 T C Y Moments of forces The photograph shows a mobile tower crane, consisting of the main vertical section housing the engine, winding gear and controls and the boom which supports the load and the counterweight.
T C Y Moments of forces The photograph shows a mobile tower crane, consisting of the main vertical section housing the engine, winding gear and controls and the boom which supports the load and the counterweight.
Chapter 9- Static Equilibrium
 Chapter 9- Static Equilibrium Changes in Office-hours The following changes will take place until the end of the semester Office-hours: - Monday, 12:00-13:00h - Wednesday, 14:00-15:00h - Friday, 13:00-14:00h
Chapter 9- Static Equilibrium Changes in Office-hours The following changes will take place until the end of the semester Office-hours: - Monday, 12:00-13:00h - Wednesday, 14:00-15:00h - Friday, 13:00-14:00h
PHYSICS 221 SPRING EXAM 1: February 20, 2014; 8:15pm 10:15pm
 PHYSICS 221 SPRING 2014 EXAM 1: February 20, 2014; 8:15pm 10:15pm Name (printed): Recitation Instructor: Section # INSTRUCTIONS: This exam contains 25 multiple-choice questions plus 2 extra credit questions,
PHYSICS 221 SPRING 2014 EXAM 1: February 20, 2014; 8:15pm 10:15pm Name (printed): Recitation Instructor: Section # INSTRUCTIONS: This exam contains 25 multiple-choice questions plus 2 extra credit questions,
UNIVERSITY PHYSICS I. Professor Meade Brooks, Collin College. Chapter 12: STATIC EQUILIBRIUM AND ELASTICITY
 UNIVERSITY PHYSICS I Professor Meade Brooks, Collin College Chapter 12: STATIC EQUILIBRIUM AND ELASTICITY Two stilt walkers in standing position. All forces acting on each stilt walker balance out; neither
UNIVERSITY PHYSICS I Professor Meade Brooks, Collin College Chapter 12: STATIC EQUILIBRIUM AND ELASTICITY Two stilt walkers in standing position. All forces acting on each stilt walker balance out; neither
Physics 1A Lecture 10B
 Physics 1A Lecture 10B "Sometimes the world puts a spin on life. When our equilibrium returns to us, we understand more because we've seen the whole picture. --Davis Barton Cross Products Another way to
Physics 1A Lecture 10B "Sometimes the world puts a spin on life. When our equilibrium returns to us, we understand more because we've seen the whole picture. --Davis Barton Cross Products Another way to
PHYSICS 221, FALL 2009 EXAM #1 SOLUTIONS WEDNESDAY, SEPTEMBER 30, 2009
 PHYSICS 221, FALL 2009 EXAM #1 SOLUTIONS WEDNESDAY, SEPTEMBER 30, 2009 Note: The unit vectors in the +x, +y, and +z directions of a right-handed Cartesian coordinate system are î, ĵ, and ˆk, respectively.
PHYSICS 221, FALL 2009 EXAM #1 SOLUTIONS WEDNESDAY, SEPTEMBER 30, 2009 Note: The unit vectors in the +x, +y, and +z directions of a right-handed Cartesian coordinate system are î, ĵ, and ˆk, respectively.
Chapter: Work and Machines
 Table of Contents Chapter: Work and Machines Section 1: Work Section 2: Using Machines Section 3: Simple Machines 1 Work What is work? To many people, the word work means something they do to earn money.
Table of Contents Chapter: Work and Machines Section 1: Work Section 2: Using Machines Section 3: Simple Machines 1 Work What is work? To many people, the word work means something they do to earn money.
Review PHYS114 Chapters 4-7
 Review PHYS114 Chapters 4-7 MULTIPLE CHOICE. Choose the one alternative that best completes the statement or answers the question. 1) A 27 kg object is accelerated at a rate of 1.7 m/s 2. What force does
Review PHYS114 Chapters 4-7 MULTIPLE CHOICE. Choose the one alternative that best completes the statement or answers the question. 1) A 27 kg object is accelerated at a rate of 1.7 m/s 2. What force does
Dynamics: Newton s Laws of Motion
 Lecture 6 Chapter 4 Physics I 02.10.2013 Dynamics: Newton s Laws of Motion Course website: http://faculty.uml.edu/andriy_danylov/teaching/physicsi Lecture Capture: http://echo360.uml.edu/danylov2013/physics1spring.html
Lecture 6 Chapter 4 Physics I 02.10.2013 Dynamics: Newton s Laws of Motion Course website: http://faculty.uml.edu/andriy_danylov/teaching/physicsi Lecture Capture: http://echo360.uml.edu/danylov2013/physics1spring.html
GIANCOLI READING ACTIVITY Lesson 8-4
 AP PHYSICS Name: Period: Date: DEVIL PHYSICS BADDEST CLASS ON CAMPUS 1. Big Idea(s): GIANCOLI READING ACTIVITY Lesson 8-4 a. Big Idea 3: The interactions of an object with other objects can be described
AP PHYSICS Name: Period: Date: DEVIL PHYSICS BADDEST CLASS ON CAMPUS 1. Big Idea(s): GIANCOLI READING ACTIVITY Lesson 8-4 a. Big Idea 3: The interactions of an object with other objects can be described
Casting Physics Simplified Part Two. Frames of Reference
 Casting Physics Simplified Part Two Part one of this paper discussed physics that applies to linear motion, i.e., motion in a straight line. This section of the paper will expand these concepts to angular
Casting Physics Simplified Part Two Part one of this paper discussed physics that applies to linear motion, i.e., motion in a straight line. This section of the paper will expand these concepts to angular