Moment of a force (scalar, vector ) Cross product Principle of Moments Couples Force and Couple Systems Simple Distributed Loading
|
|
|
- Norah Posy Harmon
- 6 years ago
- Views:
Transcription

1 Chapter 4
 Cross product Principle")

2 Moment of a force (scalar, vector ) Cross product Principle of Moments Couples Force and Couple Systems Simple Distributed Loading

3 The moment of a force about a point provides a measure of the tendency for rotation (sometimes called a torque). the magnitude of the moment is M o = F d d is the perpendicular distance from point O to the line of action of the force.

4 the direction of M O is either clockwise or counterclockwise, depending on the tendency for rotation
5 For the force shown, we could find its perpendicular distance from the center of rotation Or we determine M O by using the components of F The typical sign convention for a moment in 2-D is that counter-clockwise is considered positive. So M O = (F Y a) (F X b). b O b O d a a F y F F F x
6

7 For some problems e.g. 3-d, finding the relevant perpendicular distance may not be easy The vector cross, a vector operation, provides a general method of finding the moment of a force C = A B. Magnitude of vector C is A B sin Direction of C is u C where u C is the unit vector perpendicular to both to the plane containing the vectors A and B vectors

8 The right-hand rule is a useful tool for determining the direction of the vector resulting from a cross product Note that a vector crossed into itself is zero, e.g., i i = 0 why?

9 Alternately we can use the determinant of a 2x2 matrix to determine the cross product In fact this is the most common method used
10


11 Consider the 3-d force vector To evaluate the moment we would want to depict it as: Clearly, not easy. The vector cross product makes it easier

12 the vector cross product, M O = r F. Here r is the position vector from point O to any point on the line of action of F. Using the determinant: M O = (r y F Z - r Z F y ) i - (r x F z - r z F x ) j + (r x F y - r y F x ) k

13

14
15 Recall that the moment of a scalar force about any point O is M O = F d O where d O is the perpendicular (or shortest) distance from the point to the force s line of action.
. However, as we saw, such problems are easier if we use vector")
16 In this example, the moment about the y-axis M y = F z (d x ) = F (r cos θ). However, as we saw, such problems are easier if we use vector formulation
17 Let us find the moment of F about the axis a - a. First compute the moment of F about any arbitrary point O that lies on the a - a axis using the cross product. M O = r F Next, find the component of M O a - a using the dot product. M a -a = u a M O along the axis


18 Alternately: M a - a can also be obtained by projection as Where u a represents the unit vector along the axis a -a axis, r is the position vector from any point on the a -a axis to any point A on the line of action of the force, and F is the force vector The above equation is called the triple scalar product
19



20 A couple is defined as two parallel forces with the same magnitude but opposite in direction separated by a perpendicular distance d
21 The moment of a couple is defined as M O = F d (using a scalar analysis) or as M O = r F (using a vector analysis). Here r is any position vector from the line of action of F to the line of action of F.

22 the net force equals zero and the magnitude of the net moment equals F *d. the moment of a couple is a free vector because it depends only on the distance between the forces,. It can be moved anywhere on the body and have the same external effect on the body. Moments due to couples can be added together using the same rules as adding any vectors.

23


24 Consider a number of forces and couple moments are acting on a body They can be combined into a single force and couple moment having the same overall effect The two force and couple systems are called equivalent systems
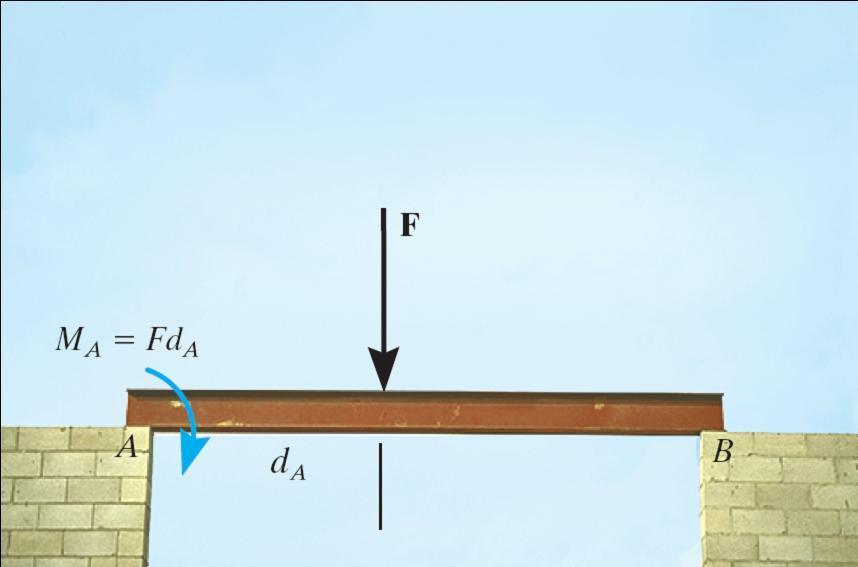
25 Moving a force from A to B, when both points are on the vector s line of action, does not change the external effect. Hence, a force vector is called a sliding vector. However note that the internal effect of the force on the body does depend on where the force is applied
26 When a force is moved, but not along its line of action, there is a change in its external effect. Moving a force from point A to B requires creating an additional couple moment. So moving a force means you have to add a new couple. B Since this new couple moment is a free vector, it can be applied at any point on the body.


27 When several forces and couple moments act on a body, we can move each force and its associated couple moment to a common point O We can then add all the forces and couple moments together and find one resultant force-couple moment pair


28 If the force system lies in the 2-d x-y plane, then the reduced equivalent system can be obtained using the following three scalar equations.


29 If F R and M RO are perpendicular to each other, then the system can be further reduced to a single force, F R, by simply moving F R from O to P. In three special cases, concurrent, coplanar, and parallel systems of forces, the system can always be reduced to a single force.

30



31 For some problems, it is often helpful to reduce this distributed load to a single force.

32 Consider uniform wind pressure acting on a triangular sign To design the joint between the sign and the sign post, we need to determine a single equivalent resultant force and its location
33 Consider an element of length dx. The force magnitude df acting on it is given as df = w(x) dx The net force on the beam is given by + F R = L df = L w(x) dx = A where A is the area under the loading curve w(x)
34 The force df will produce a moment of (x)(df) about point O. The total moment about point O is given as + M RO = L x df = L x w(x) dx Assuming that F R acts at, it will produce the moment about point O as + M RO = ( x ) (F R ) = x L w(x) dx

35 Comparing the last two equations we can find the location of the point of action of the resultant of the distributed load


36 What do you notice about the location of the equivalent of the rectangular and triangular loadings?
37 Now we solve problems
EQUIVALENT FORCE-COUPLE SYSTEMS
 EQUIVALENT FORCE-COUPLE SYSTEMS Today s Objectives: Students will be able to: 1) Determine the effect of moving a force. 2) Find an equivalent force-couple system for a system of forces and couples. APPLICATIONS
EQUIVALENT FORCE-COUPLE SYSTEMS Today s Objectives: Students will be able to: 1) Determine the effect of moving a force. 2) Find an equivalent force-couple system for a system of forces and couples. APPLICATIONS
Engineering Mechanics Statics
 Mechanical Systems Engineering_2016 Engineering Mechanics Statics 6. Moment of a Couple Dr. Rami Zakaria Moment of a Couple We need a moment (or torque) of (12 N m) to rotate the wheel. Notice that one
Mechanical Systems Engineering_2016 Engineering Mechanics Statics 6. Moment of a Couple Dr. Rami Zakaria Moment of a Couple We need a moment (or torque) of (12 N m) to rotate the wheel. Notice that one
REDUCTION OF A SIMPLE DISTRIBUTED LOADING. Today s Objectives: Students will be able to determine an equivalent force for a distributed load.
 REDUCTION OF A SIMPLE DISTRIBUTED LOADING Today s Objectives: Students will be able to determine an equivalent force for a distributed load. = READING QUIZ 1. The resultant force (F R ) due to a distributed
REDUCTION OF A SIMPLE DISTRIBUTED LOADING Today s Objectives: Students will be able to determine an equivalent force for a distributed load. = READING QUIZ 1. The resultant force (F R ) due to a distributed
SIMPLIFICATION OF FORCE AND COUPLE SYSTEMS & THEIR FURTHER SIMPLIFICATION
 SIMPLIFICATION OF FORCE AND COUPLE SYSTEMS & THEIR FURTHER SIMPLIFICATION Today s Objectives: Students will be able to: a) Determine the effect of moving a force. b) Find an equivalent force-couple system
SIMPLIFICATION OF FORCE AND COUPLE SYSTEMS & THEIR FURTHER SIMPLIFICATION Today s Objectives: Students will be able to: a) Determine the effect of moving a force. b) Find an equivalent force-couple system
Mechanics of Materials
 Mechanics of Materials 2. Introduction Dr. Rami Zakaria References: 1. Engineering Mechanics: Statics, R.C. Hibbeler, 12 th ed, Pearson 2. Mechanics of Materials: R.C. Hibbeler, 9 th ed, Pearson 3. Mechanics
Mechanics of Materials 2. Introduction Dr. Rami Zakaria References: 1. Engineering Mechanics: Statics, R.C. Hibbeler, 12 th ed, Pearson 2. Mechanics of Materials: R.C. Hibbeler, 9 th ed, Pearson 3. Mechanics
MOMENT OF A FORCE ABOUT A POINT
 MOMENT OF A FORCE ABOUT A POINT The tendency of a body to rotate about an axis passing through a specific point O when acted upon by a force (sometimes called a torque). 1 APPLICATIONS A torque or moment
MOMENT OF A FORCE ABOUT A POINT The tendency of a body to rotate about an axis passing through a specific point O when acted upon by a force (sometimes called a torque). 1 APPLICATIONS A torque or moment
Chapter 4 Force System Resultant Moment of a Force
 Chapter 4 Force System Resultant Moment of a Force MOMENT OF A FORCE SCALAR FORMULATION, CROSS PRODUCT, MOMENT OF A FORCE VECTOR FORMULATION, & PRINCIPLE OF MOMENTS Today s Objectives : Students will be
Chapter 4 Force System Resultant Moment of a Force MOMENT OF A FORCE SCALAR FORMULATION, CROSS PRODUCT, MOMENT OF A FORCE VECTOR FORMULATION, & PRINCIPLE OF MOMENTS Today s Objectives : Students will be
Force System Resultants. Engineering Mechanics: Statics
 Force System Resultants Engineering Mechanics: Statics Chapter Objectives To discuss the concept of the moment of a force and show how to calculate it in 2-D and 3-D systems. Definition of the moment of
Force System Resultants Engineering Mechanics: Statics Chapter Objectives To discuss the concept of the moment of a force and show how to calculate it in 2-D and 3-D systems. Definition of the moment of
ARC241 Structural Analysis I Lecture 5, Sections ST4.5 ST4.10
 Lecture 5, Sections ST4.5 ST4.10 ST4.5) Moment of a Force about a Specified Axis ST4.6) Moment of a Couple ST4.7) Equivalent System ST4.8) Resultant of a Force and a Couple System ST4.9) Further Reduction
Lecture 5, Sections ST4.5 ST4.10 ST4.5) Moment of a Force about a Specified Axis ST4.6) Moment of a Couple ST4.7) Equivalent System ST4.8) Resultant of a Force and a Couple System ST4.9) Further Reduction
ENGR-1100 Introduction to Engineering Analysis. Lecture 9
 ENGR-1100 Introduction to Engineering Analysis Lecture 9 MOMENT OF A FORCE (SCALAR FORMULATION), CROSS PRODUCT, MOMENT OF A FORCE (VECTOR FORMULATION), & PRINCIPLE OF MOMENTS Today s Objectives : Students
ENGR-1100 Introduction to Engineering Analysis Lecture 9 MOMENT OF A FORCE (SCALAR FORMULATION), CROSS PRODUCT, MOMENT OF A FORCE (VECTOR FORMULATION), & PRINCIPLE OF MOMENTS Today s Objectives : Students
EQUIVALENT SYSTEMS, RESULTANTS OF FORCE AND COUPLE SYSTEM, & FURTHER REDUCTION OF A FORCE AND COUPLE SYSTEM
 EQUIVALENT SYSTEMS, RESULTANTS OF FORCE AND COUPLE SYSTEM, & FURTHER REDUCTION OF A FORCE AND COUPLE SYSTEM Today s Objectives: Students will be able to: a) Determine the effect of moving a force. b) Find
EQUIVALENT SYSTEMS, RESULTANTS OF FORCE AND COUPLE SYSTEM, & FURTHER REDUCTION OF A FORCE AND COUPLE SYSTEM Today s Objectives: Students will be able to: a) Determine the effect of moving a force. b) Find
Ishik University / Sulaimani Architecture Department Structure ARCH 214 Chapter -4- Force System Resultant
 Ishik University / Sulaimani Architecture Department 1 Structure ARCH 214 Chapter -4- Force System Resultant 2 1 CHAPTER OBJECTIVES To discuss the concept of the moment of a force and show how to calculate
Ishik University / Sulaimani Architecture Department 1 Structure ARCH 214 Chapter -4- Force System Resultant 2 1 CHAPTER OBJECTIVES To discuss the concept of the moment of a force and show how to calculate
SKAA 1213 Engineering Mechanics
 SKAA 1213 Engineering Mechanics TPIC 5 Moment and Couple Lecturers: Rosli Anang Dr. Mohd Yunus Ishak Dr. Tan Cher Siang Moment of a Force Moment of a force about a point/axis the tendency of the force
SKAA 1213 Engineering Mechanics TPIC 5 Moment and Couple Lecturers: Rosli Anang Dr. Mohd Yunus Ishak Dr. Tan Cher Siang Moment of a Force Moment of a force about a point/axis the tendency of the force
MOMENT ABOUT AN AXIS
 Today s Objectives: MOMENT ABOUT AN AXIS Students will be able to determine the moment of a force about an axis using a) scalar analysis, and b) vector analysis. In-Class Activities: Applications Scalar
Today s Objectives: MOMENT ABOUT AN AXIS Students will be able to determine the moment of a force about an axis using a) scalar analysis, and b) vector analysis. In-Class Activities: Applications Scalar
Chapter -4- Force System Resultant
 Ishik University / Sulaimani Civil Engineering Department Chapter -4- Force System Resultant 1 4.3 MOMENT OF A COUPLE Couple - two parallel forces. - same magnitude but opposite direction. - separated
Ishik University / Sulaimani Civil Engineering Department Chapter -4- Force System Resultant 1 4.3 MOMENT OF A COUPLE Couple - two parallel forces. - same magnitude but opposite direction. - separated
Chapter -4- Force System Resultant
 Ishik University / Sulaimani Civil Engineering Department Chapter -4- Force System Resultant 1 2 1 CHAPTER OBJECTIVES To discuss the concept of the moment of a force and show how to calculate it in two
Ishik University / Sulaimani Civil Engineering Department Chapter -4- Force System Resultant 1 2 1 CHAPTER OBJECTIVES To discuss the concept of the moment of a force and show how to calculate it in two
MOMENT OF A FORCE SCALAR FORMULATION, CROSS PRODUCT, MOMENT OF A FORCE VECTOR FORMULATION, & PRINCIPLE OF MOMENTS
 MOMENT OF A FORCE SCALAR FORMULATION, CROSS PRODUCT, MOMENT OF A FORCE VECTOR FORMULATION, & PRINCIPLE OF MOMENTS Today s Objectives : Students will be able to: a) understand and define moment, and, b)
MOMENT OF A FORCE SCALAR FORMULATION, CROSS PRODUCT, MOMENT OF A FORCE VECTOR FORMULATION, & PRINCIPLE OF MOMENTS Today s Objectives : Students will be able to: a) understand and define moment, and, b)
MOMENT OF A COUPLE. Today s Objectives: Students will be able to. a) define a couple, and, b) determine the moment of a couple.
 define a couple, and, b) determine the moment of a couple.") Today s Objectives: Students will be able to MOMENT OF A COUPLE a) define a couple, and, b) determine the moment of a couple. In-Class activities: Check Homework Reading Quiz Applications Moment of a Couple
Today s Objectives: Students will be able to MOMENT OF A COUPLE a) define a couple, and, b) determine the moment of a couple. In-Class activities: Check Homework Reading Quiz Applications Moment of a Couple
Mengetahui dan memahami maksud dari momen gaya, momen kopel, dan cara. Apa yang dipelajari sekarang? memindah gaya MOMEN DAN KOPEL
 MOMEN DAN KOPEL Apa yang dipelajari sekarang? Mengetahui dan memahami maksud dari momen gaya, momen kopel, dan cara memindah gaya Apa itu momen gaya? The moment of a force about a point provides a measure
MOMEN DAN KOPEL Apa yang dipelajari sekarang? Mengetahui dan memahami maksud dari momen gaya, momen kopel, dan cara memindah gaya Apa itu momen gaya? The moment of a force about a point provides a measure
2. Force Systems. 2.1 Introduction. 2.2 Force
 2. Force Systems 2.1 Introduction 2.2 Force - A force is an action of one body on another. - A force is an action which tends to cause acceleration of a body (in dynamics). - A force is a vector quantity.
2. Force Systems 2.1 Introduction 2.2 Force - A force is an action of one body on another. - A force is an action which tends to cause acceleration of a body (in dynamics). - A force is a vector quantity.
ENGINEERING MECHANICS BAA1113. Chapter 4: Force System Resultants (Static)
") ENGINEERING MECHANICS BAA1113 Chapter 4: Force System Resultants (Static) by Pn Rokiah Bt Othman Faculty of Civil Engineering & Earth Resources rokiah@ump.edu.my Chapter Description Aims To explain the
ENGINEERING MECHANICS BAA1113 Chapter 4: Force System Resultants (Static) by Pn Rokiah Bt Othman Faculty of Civil Engineering & Earth Resources rokiah@ump.edu.my Chapter Description Aims To explain the
The Cross Product. In this section, we will learn about: Cross products of vectors and their applications.
 The Cross Product In this section, we will learn about: Cross products of vectors and their applications. THE CROSS PRODUCT The cross product a x b of two vectors a and b, unlike the dot product, is a
The Cross Product In this section, we will learn about: Cross products of vectors and their applications. THE CROSS PRODUCT The cross product a x b of two vectors a and b, unlike the dot product, is a
EQUATIONS OF EQUILIBRIUM & TWO-AND THREE-FORCE MEMEBERS
 EQUATIONS OF EQUILIBRIUM & TWO-AND THREE-FORCE MEMEBERS Today s Objectives: Students will be able to: a) Apply equations of equilibrium to solve for unknowns, and, b) Recognize two-force members. READING
EQUATIONS OF EQUILIBRIUM & TWO-AND THREE-FORCE MEMEBERS Today s Objectives: Students will be able to: a) Apply equations of equilibrium to solve for unknowns, and, b) Recognize two-force members. READING
Chapter 12 Static Equilibrium
 Chapter Static Equilibrium. Analysis Model: Rigid Body in Equilibrium. More on the Center of Gravity. Examples of Rigid Objects in Static Equilibrium CHAPTER : STATIC EQUILIBRIUM AND ELASTICITY.) The Conditions
Chapter Static Equilibrium. Analysis Model: Rigid Body in Equilibrium. More on the Center of Gravity. Examples of Rigid Objects in Static Equilibrium CHAPTER : STATIC EQUILIBRIUM AND ELASTICITY.) The Conditions
five moments ELEMENTS OF ARCHITECTURAL STRUCTURES: FORM, BEHAVIOR, AND DESIGN DR. ANNE NICHOLS SPRING 2014 lecture ARCH 614
 ELEMENTS OF ARCHITECTURAL STRUCTURES: FORM, BEHAVIOR, AND DESIGN DR. ANNE NICHOLS SPRING 2014 lecture five moments Moments 1 Moments forces have the tendency to make a body rotate about an axis http://www.physics.umd.edu
ELEMENTS OF ARCHITECTURAL STRUCTURES: FORM, BEHAVIOR, AND DESIGN DR. ANNE NICHOLS SPRING 2014 lecture five moments Moments 1 Moments forces have the tendency to make a body rotate about an axis http://www.physics.umd.edu
The Cross Product. Philippe B. Laval. Spring 2012 KSU. Philippe B. Laval (KSU) The Cross Product Spring /
 The Cross Product Spring /") The Cross Product Philippe B Laval KSU Spring 2012 Philippe B Laval (KSU) The Cross Product Spring 2012 1 / 15 Introduction The cross product is the second multiplication operation between vectors we will
The Cross Product Philippe B Laval KSU Spring 2012 Philippe B Laval (KSU) The Cross Product Spring 2012 1 / 15 Introduction The cross product is the second multiplication operation between vectors we will
Vector Mechanics: Statics
 PDHOnline Course G492 (4 PDH) Vector Mechanics: Statics Mark A. Strain, P.E. 2014 PDH Online PDH Center 5272 Meadow Estates Drive Fairfax, VA 22030-6658 Phone & Fax: 703-988-0088 www.pdhonline.org www.pdhcenter.com
PDHOnline Course G492 (4 PDH) Vector Mechanics: Statics Mark A. Strain, P.E. 2014 PDH Online PDH Center 5272 Meadow Estates Drive Fairfax, VA 22030-6658 Phone & Fax: 703-988-0088 www.pdhonline.org www.pdhcenter.com
APPLIED MECHANICS I Resultant of Concurrent Forces Consider a body acted upon by co-planar forces as shown in Fig 1.1(a).
.") PPLIED MECHNICS I 1. Introduction to Mechanics Mechanics is a science that describes and predicts the conditions of rest or motion of bodies under the action of forces. It is divided into three parts 1.
PPLIED MECHNICS I 1. Introduction to Mechanics Mechanics is a science that describes and predicts the conditions of rest or motion of bodies under the action of forces. It is divided into three parts 1.
MOMENT OF A COUPLE. Today s Objectives: Students will be able to a) define a couple, and, b) determine the moment of a couple.
 define a couple, and, b) determine the moment of a couple.") MOMENT OF A COUPLE Today s Objectives: Students will be able to a) define a couple, and, b) determine the moment of a couple. In Class activities: Check Homework Reading Quiz Applications Moment of a Couple
MOMENT OF A COUPLE Today s Objectives: Students will be able to a) define a couple, and, b) determine the moment of a couple. In Class activities: Check Homework Reading Quiz Applications Moment of a Couple
F A C U L T Y O F E D U C A T I O N. Physics Electromagnetism: Induced Currents Science and Mathematics Education Research Group
 F A C U L T Y O F E D U C A T I O N Department of Curriculum and Pedagogy Physics Electromagnetism: Induced Currents Science and Mathematics Education Research Group Supported by UBC Teaching and Learning
F A C U L T Y O F E D U C A T I O N Department of Curriculum and Pedagogy Physics Electromagnetism: Induced Currents Science and Mathematics Education Research Group Supported by UBC Teaching and Learning
Course Overview. Statics (Freshman Fall) Dynamics: x(t)= f(f(t)) displacement as a function of time and applied force
 Dynamics: x(t)= f(f(t)) displacement as a function of time and applied force") Course Overview Statics (Freshman Fall) Engineering Mechanics Dynamics (Freshman Spring) Strength of Materials (Sophomore Fall) Mechanism Kinematics and Dynamics (Sophomore Spring ) Aircraft structures
Course Overview Statics (Freshman Fall) Engineering Mechanics Dynamics (Freshman Spring) Strength of Materials (Sophomore Fall) Mechanism Kinematics and Dynamics (Sophomore Spring ) Aircraft structures
Objective 1. Lesson 87: The Cross Product of Vectors IBHL - SANTOWSKI FINDING THE CROSS PRODUCT OF TWO VECTORS
 Lesson 87: The Cross Product of Vectors IBHL - SANTOWSKI In this lesson you will learn how to find the cross product of two vectors how to find an orthogonal vector to a plane defined by two vectors how
Lesson 87: The Cross Product of Vectors IBHL - SANTOWSKI In this lesson you will learn how to find the cross product of two vectors how to find an orthogonal vector to a plane defined by two vectors how
Chap. 3 Rigid Bodies: Equivalent Systems of Forces. External/Internal Forces; Equivalent Forces
 Chap. 3 Rigid Bodies: Equivalent Systems of Forces Treatment of a body as a single particle is not always possible. In general, the size of the body and the specific points of application of the forces
Chap. 3 Rigid Bodies: Equivalent Systems of Forces Treatment of a body as a single particle is not always possible. In general, the size of the body and the specific points of application of the forces
Chap. 4 Force System Resultants
 Chap. 4 Force System Resultants Chapter Outline Moment of a Force Scalar Formation Cross Product Moment of Force Vector Formulation Principle of Moments Moment of a Force about a Specified xis Moment of
Chap. 4 Force System Resultants Chapter Outline Moment of a Force Scalar Formation Cross Product Moment of Force Vector Formulation Principle of Moments Moment of a Force about a Specified xis Moment of
EQUIVALENT SYSTEMS, RESULTANTS OF FORCE AND COUPLE SYSTEM, & FURTHER REDUCTION OF A FORCE AND COUPLE SYSTEM
 EQUIVALENT SYSTEMS, RESULTANTS OF FORCE AND COUPLE SYSTEM, & FURTHER REDUCTION OF A FORCE AND COUPLE SYSTEM Today s Objectives: Students will be able to: c) Determine the effect of moving a force. b) Find
EQUIVALENT SYSTEMS, RESULTANTS OF FORCE AND COUPLE SYSTEM, & FURTHER REDUCTION OF A FORCE AND COUPLE SYSTEM Today s Objectives: Students will be able to: c) Determine the effect of moving a force. b) Find
Torque. Physics 6A. Prepared by Vince Zaccone For Campus Learning Assistance Services at UCSB
 Physics 6A Torque is what causes angular acceleration (just like a force causes linear acceleration) Torque is what causes angular acceleration (just like a force causes linear acceleration) For a torque
Physics 6A Torque is what causes angular acceleration (just like a force causes linear acceleration) Torque is what causes angular acceleration (just like a force causes linear acceleration) For a torque
Equivalent Force Systems
 Equivalent Force Systems EQUIVALENT SYSTEMS for SINGLE FORCE Determining the effect of moving a force. 1. MOVING A FORCE ON ITS LINE OF ACTION 2. MOVING A FORCE OFF OF ITS LINE OF ACTION Equivalent Force
Equivalent Force Systems EQUIVALENT SYSTEMS for SINGLE FORCE Determining the effect of moving a force. 1. MOVING A FORCE ON ITS LINE OF ACTION 2. MOVING A FORCE OFF OF ITS LINE OF ACTION Equivalent Force
STATICS. Equivalent Systems of Forces. Vector Mechanics for Engineers: Statics VECTOR MECHANICS FOR ENGINEERS: Contents & Objectives.
 3 Rigid CHATER VECTOR ECHANICS FOR ENGINEERS: STATICS Ferdinand. Beer E. Russell Johnston, Jr. Lecture Notes: J. Walt Oler Teas Tech Universit Bodies: Equivalent Sstems of Forces Contents & Objectives
3 Rigid CHATER VECTOR ECHANICS FOR ENGINEERS: STATICS Ferdinand. Beer E. Russell Johnston, Jr. Lecture Notes: J. Walt Oler Teas Tech Universit Bodies: Equivalent Sstems of Forces Contents & Objectives
What you will learn today
 What you will learn today The Dot Product Equations of Vectors and the Geometry of Space 1/29 Direction angles and Direction cosines Projections Definitions: 1. a : a 1, a 2, a 3, b : b 1, b 2, b 3, a
What you will learn today The Dot Product Equations of Vectors and the Geometry of Space 1/29 Direction angles and Direction cosines Projections Definitions: 1. a : a 1, a 2, a 3, b : b 1, b 2, b 3, a
Vectors a vector is a quantity that has both a magnitude (size) and a direction
 and a direction") Vectors In physics, a vector is a quantity that has both a magnitude (size) and a direction. Familiar examples of vectors include velocity, force, and electric field. For any applications beyond one dimension,
Vectors In physics, a vector is a quantity that has both a magnitude (size) and a direction. Familiar examples of vectors include velocity, force, and electric field. For any applications beyond one dimension,
STATICS. Rigid Bodies: Equivalent Systems of Forces VECTOR MECHANICS FOR ENGINEERS: Eighth Edition CHAPTER. Ferdinand P. Beer E. Russell Johnston, Jr.
 Eighth E CHAPTER VECTOR MECHANICS FOR ENGINEERS: STATICS Ferdinand P. Beer E. Russell Johnston, Jr. Lecture Notes: J. Walt Oler Texas Tech University Rigid Bodies: Equivalent Systems of Forces Contents
Eighth E CHAPTER VECTOR MECHANICS FOR ENGINEERS: STATICS Ferdinand P. Beer E. Russell Johnston, Jr. Lecture Notes: J. Walt Oler Texas Tech University Rigid Bodies: Equivalent Systems of Forces Contents
Static equilibrium. Objectives. Physics terms. Assessment. Brainstorm. Equations 6/3/14
 Static equilibrium Objectives State the conditions of static equilibrium in terms of forces and torques. Draw a free-body diagram of a lever showing all forces. Use the condition of equilibrium to solve
Static equilibrium Objectives State the conditions of static equilibrium in terms of forces and torques. Draw a free-body diagram of a lever showing all forces. Use the condition of equilibrium to solve
STATICS. FE Review. Statics, Fourteenth Edition R.C. Hibbeler. Copyright 2016 by Pearson Education, Inc. All rights reserved.
 STATICS FE Review 1. Resultants of force systems VECTOR OPERATIONS (Section 2.2) Scalar Multiplication and Division VECTOR ADDITION USING EITHER THE PARALLELOGRAM LAW OR TRIANGLE Parallelogram Law: Triangle
STATICS FE Review 1. Resultants of force systems VECTOR OPERATIONS (Section 2.2) Scalar Multiplication and Division VECTOR ADDITION USING EITHER THE PARALLELOGRAM LAW OR TRIANGLE Parallelogram Law: Triangle
Reflections and Rotations in R 3
 Reflections and Rotations in R 3 P. J. Ryan May 29, 21 Rotations as Compositions of Reflections Recall that the reflection in the hyperplane H through the origin in R n is given by f(x) = x 2 ξ, x ξ (1)
Reflections and Rotations in R 3 P. J. Ryan May 29, 21 Rotations as Compositions of Reflections Recall that the reflection in the hyperplane H through the origin in R n is given by f(x) = x 2 ξ, x ξ (1)
MAT 1339-S14 Class 8
 MAT 1339-S14 Class 8 July 28, 2014 Contents 7.2 Review Dot Product........................... 2 7.3 Applications of the Dot Product..................... 4 7.4 Vectors in Three-Space.........................
MAT 1339-S14 Class 8 July 28, 2014 Contents 7.2 Review Dot Product........................... 2 7.3 Applications of the Dot Product..................... 4 7.4 Vectors in Three-Space.........................
Force System Resultants Distributed Loads. A hole has been found in the nudist camp wall. The police are looking into it.
 Force System Resultants A hole has been found in the nudist camp wall. The police are looking into it. Objectives Understand the concept and representation of a distributed load Understand how to convert
Force System Resultants A hole has been found in the nudist camp wall. The police are looking into it. Objectives Understand the concept and representation of a distributed load Understand how to convert
Vector/Matrix operations. *Remember: All parts of HW 1 are due on 1/31 or 2/1
 Lecture 4: Topics: Linear Algebra II Vector/Matrix operations Homework: HW, Part *Remember: All parts of HW are due on / or / Solving Axb Row reduction method can be used Simple operations on equations
Lecture 4: Topics: Linear Algebra II Vector/Matrix operations Homework: HW, Part *Remember: All parts of HW are due on / or / Solving Axb Row reduction method can be used Simple operations on equations
Properties of plane surfaces I: First moment and centroid of area
 Properties of plane surfaces I: First moment and centroid of area Having deal with trusses and frictional forces, we now change gears and go on to discuss some properties of surfaces mathematically. Of
Properties of plane surfaces I: First moment and centroid of area Having deal with trusses and frictional forces, we now change gears and go on to discuss some properties of surfaces mathematically. Of
Vector Operations. Vector Operations. Graphical Operations. Component Operations. ( ) ˆk
 ˆk") Vector Operations Vector Operations ME 202 Multiplication by a scalar Addition/subtraction Scalar multiplication (dot product) Vector multiplication (cross product) 1 2 Graphical Operations Component Operations
Vector Operations Vector Operations ME 202 Multiplication by a scalar Addition/subtraction Scalar multiplication (dot product) Vector multiplication (cross product) 1 2 Graphical Operations Component Operations
Static Equilibrium; Torque
 Static Equilibrium; Torque The Conditions for Equilibrium An object with forces acting on it, but that is not moving, is said to be in equilibrium. The first condition for equilibrium is that the net force
Static Equilibrium; Torque The Conditions for Equilibrium An object with forces acting on it, but that is not moving, is said to be in equilibrium. The first condition for equilibrium is that the net force
FE Statics Review. Sanford Meek Department of Mechanical Engineering Kenn 226 (801)
") FE Statics Review Sanford Meek Department of Mechanical Engineering Kenn 226 (801)581-8562 meek@mech.utah.edu Statics! forces = 0!moments = 0 2 Vectors Scalars have magnitude only Vectors have magnitude
FE Statics Review Sanford Meek Department of Mechanical Engineering Kenn 226 (801)581-8562 meek@mech.utah.edu Statics! forces = 0!moments = 0 2 Vectors Scalars have magnitude only Vectors have magnitude
Chapter 5: Equilibrium of a Rigid Body
 Chapter 5: Equilibrium of a Rigid Body Develop the equations of equilibrium for a rigid body Concept of the free-body diagram for a rigid body Solve rigid-body equilibrium problems using the equations
Chapter 5: Equilibrium of a Rigid Body Develop the equations of equilibrium for a rigid body Concept of the free-body diagram for a rigid body Solve rigid-body equilibrium problems using the equations
FE Sta'cs Review. Torch Ellio0 (801) MCE room 2016 (through 2000B door)
 MCE room 2016 (through 2000B door)") FE Sta'cs Review h0p://www.coe.utah.edu/current- undergrad/fee.php Scroll down to: Sta'cs Review - Slides Torch Ellio0 ellio0@eng.utah.edu (801) 587-9016 MCE room 2016 (through 2000B door) Posi'on and
FE Sta'cs Review h0p://www.coe.utah.edu/current- undergrad/fee.php Scroll down to: Sta'cs Review - Slides Torch Ellio0 ellio0@eng.utah.edu (801) 587-9016 MCE room 2016 (through 2000B door) Posi'on and
Engineering Mechanics Prof. U. S. Dixit Department of Mechanical Engineering Indian Institute of Technology, Guwahati
 Engineering Mechanics Prof. U. S. Dixit Department of Mechanical Engineering Indian Institute of Technology, Guwahati Module No. - 01 Basics of Statics Lecture No. - 01 Fundamental of Engineering Mechanics
Engineering Mechanics Prof. U. S. Dixit Department of Mechanical Engineering Indian Institute of Technology, Guwahati Module No. - 01 Basics of Statics Lecture No. - 01 Fundamental of Engineering Mechanics
Chapter 8 Rotational Equilibrium and Rotational Dynamics Force vs. Torque Forces cause accelerations Torques cause angular accelerations Force and
 Chapter 8 Rotational Equilibrium and Rotational Dynamics Force vs. Torque Forces cause accelerations Torques cause angular accelerations Force and torque are related Torque The door is free to rotate about
Chapter 8 Rotational Equilibrium and Rotational Dynamics Force vs. Torque Forces cause accelerations Torques cause angular accelerations Force and torque are related Torque The door is free to rotate about
Chapter 2 - Vector Algebra
 A spatial vector, or simply vector, is a concept characterized by a magnitude and a direction, and which sums with other vectors according to the Parallelogram Law. A vector can be thought of as an arrow
A spatial vector, or simply vector, is a concept characterized by a magnitude and a direction, and which sums with other vectors according to the Parallelogram Law. A vector can be thought of as an arrow
Chapter 9- Static Equilibrium
 Chapter 9- Static Equilibrium Changes in Office-hours The following changes will take place until the end of the semester Office-hours: - Monday, 12:00-13:00h - Wednesday, 14:00-15:00h - Friday, 13:00-14:00h
Chapter 9- Static Equilibrium Changes in Office-hours The following changes will take place until the end of the semester Office-hours: - Monday, 12:00-13:00h - Wednesday, 14:00-15:00h - Friday, 13:00-14:00h
Chapter 12. Static Equilibrium and Elasticity
 Chapter 12 Static Equilibrium and Elasticity Static Equilibrium Equilibrium implies that the object moves with both constant velocity and constant angular velocity relative to an observer in an inertial
Chapter 12 Static Equilibrium and Elasticity Static Equilibrium Equilibrium implies that the object moves with both constant velocity and constant angular velocity relative to an observer in an inertial
STATICS. Equivalent Systems of Forces. Vector Mechanics for Engineers: Statics VECTOR MECHANICS FOR ENGINEERS: Contents 9/3/2015.
 3 Rigid CHPTER VECTR ECHNICS R ENGINEERS: STTICS erdinand P. eer E. Russell Johnston, Jr. Lecture Notes: J. Walt ler Teas Tech Universit odies: Equivalent Sstems of orces Contents Introduction Eternal
3 Rigid CHPTER VECTR ECHNICS R ENGINEERS: STTICS erdinand P. eer E. Russell Johnston, Jr. Lecture Notes: J. Walt ler Teas Tech Universit odies: Equivalent Sstems of orces Contents Introduction Eternal
Torque and Rotational Equilibrium
 Torque and Rotational Equilibrium Name Section Theory Torque is the rotational analog of force. If you want something to move (translate), you apply a force; if you want something to rotate, you apply
Torque and Rotational Equilibrium Name Section Theory Torque is the rotational analog of force. If you want something to move (translate), you apply a force; if you want something to rotate, you apply
Simple Biomechanical Models. Introduction to Static Equilibrium F F. Components of Torque. Muscles Create Torques. Torque is a Vector
 Simple Biomechanical Models Introduction to Static Equilibrium Components of Torque axis of rotation (fulcrum) force (not directed through axis of rotation) force (moment) arm T = F x d force arm Muscles
Simple Biomechanical Models Introduction to Static Equilibrium Components of Torque axis of rotation (fulcrum) force (not directed through axis of rotation) force (moment) arm T = F x d force arm Muscles
Rotational Mechanics Part II Torque. Pre AP Physics
 Rotational Mechanics Part II Torque Pre AP Physics We have so far discussed rotational kinematics the description of rotational motion in terms of angle, angular velocity and angular acceleration. Now
Rotational Mechanics Part II Torque Pre AP Physics We have so far discussed rotational kinematics the description of rotational motion in terms of angle, angular velocity and angular acceleration. Now
Parallel Forces. Forces acting in the same or in opposite directions at different points on an object.
 Parallel Forces Forces acting in the same or in opposite directions at different points on an object. Statics refers to the bodies in equilibrium. Equilibrium deals with the absence of a net force. When
Parallel Forces Forces acting in the same or in opposite directions at different points on an object. Statics refers to the bodies in equilibrium. Equilibrium deals with the absence of a net force. When
 For a general development of the theoretical aspects of mechanics, however, a more rigorous treatment is possible by using vector analysis. A vector may be denoted by drawing a short arrow above the letter
For a general development of the theoretical aspects of mechanics, however, a more rigorous treatment is possible by using vector analysis. A vector may be denoted by drawing a short arrow above the letter
Quantities which have only magnitude are called scalars. Quantities which have magnitude and direction are called vectors.
 Vectors summary Quantities which have only magnitude are called scalars. Quantities which have magnitude and direction are called vectors. AB is the position vector of B relative to A and is the vector
Vectors summary Quantities which have only magnitude are called scalars. Quantities which have magnitude and direction are called vectors. AB is the position vector of B relative to A and is the vector
Chapter 7 INTERNAL FORCES
 Chapter 7 INTERNAL FORCES READING QUIZ 1. In a multiforce member, the member is generally subjected to an internal. A) normal force B) shear force C) bending moment D) All of the above. 2. In mechanics,
Chapter 7 INTERNAL FORCES READING QUIZ 1. In a multiforce member, the member is generally subjected to an internal. A) normal force B) shear force C) bending moment D) All of the above. 2. In mechanics,
EQUATIONS OF EQUILIBRIUM & TWO- AND THREE-FORCE MEMBERS
 EQUATIONS OF EQUILIBRIUM & TWO- AND THREE-FORCE MEMBERS Today s Objectives: Students will be able to: a) Apply equations of equilibrium to solve for unknowns, and, b) Recognize two-force members. APPLICATIONS
EQUATIONS OF EQUILIBRIUM & TWO- AND THREE-FORCE MEMBERS Today s Objectives: Students will be able to: a) Apply equations of equilibrium to solve for unknowns, and, b) Recognize two-force members. APPLICATIONS
General Physics I. Lecture 8: Rotation of a Rigid Object About a Fixed Axis. Prof. WAN, Xin ( 万歆 )
") General Physics I Lecture 8: Rotation of a Rigid Object About a Fixed Axis Prof. WAN, Xin ( 万歆 ) xinwan@zju.edu.cn http://zimp.zju.edu.cn/~xinwan/ New Territory Object In the past, point particle (no rotation,
General Physics I Lecture 8: Rotation of a Rigid Object About a Fixed Axis Prof. WAN, Xin ( 万歆 ) xinwan@zju.edu.cn http://zimp.zju.edu.cn/~xinwan/ New Territory Object In the past, point particle (no rotation,
Chapter 6: Vector Analysis
 Chapter 6: Vector Analysis We use derivatives and various products of vectors in all areas of physics. For example, Newton s 2nd law is F = m d2 r. In electricity dt 2 and magnetism, we need surface and
Chapter 6: Vector Analysis We use derivatives and various products of vectors in all areas of physics. For example, Newton s 2nd law is F = m d2 r. In electricity dt 2 and magnetism, we need surface and
Levers of the Musculoskeletal System
 Levers of the Musculoskeletal System Lever system consists of: lever fulcrum load force Three classes of levers 1. first class (a) - pry bars, crowbars 2. second class (b) - wheelbarrow 3. third class
Levers of the Musculoskeletal System Lever system consists of: lever fulcrum load force Three classes of levers 1. first class (a) - pry bars, crowbars 2. second class (b) - wheelbarrow 3. third class
EQUATIONS OF EQUILIBRIUM & TWO- AND THREE-FORCE MEMBERS
 EQUATIONS OF EQUILIBRIUM & TWO- AND THREE-FORCE MEMBERS Today s Objectives: Students will be able to: a) Apply equations of equilibrium to solve for unknowns b) Identify support reactions c) Recognize
EQUATIONS OF EQUILIBRIUM & TWO- AND THREE-FORCE MEMBERS Today s Objectives: Students will be able to: a) Apply equations of equilibrium to solve for unknowns b) Identify support reactions c) Recognize
Sports biomechanics explores the relationship between the body motion, internal forces and external forces to optimize the sport performance.
 What is biomechanics? Biomechanics is the field of study that makes use of the laws of physics and engineering concepts to describe motion of body segments, and the internal and external forces, which
What is biomechanics? Biomechanics is the field of study that makes use of the laws of physics and engineering concepts to describe motion of body segments, and the internal and external forces, which
GCE214 Applied Mechanics-Statics. Lecture 04: 27/09/2017
 GCE214 Applied Mechanics-Statics Lecture 04: 27/09/2017 Dr. Ayokunle O. Balogun balogun.ayokunle@lmu.edu.ng Class: Wednesday (3 5 pm) Venue: LT1 Etiquettes and MOP Attendance is a requirement. There may
GCE214 Applied Mechanics-Statics Lecture 04: 27/09/2017 Dr. Ayokunle O. Balogun balogun.ayokunle@lmu.edu.ng Class: Wednesday (3 5 pm) Venue: LT1 Etiquettes and MOP Attendance is a requirement. There may
Chapter 8. Centripetal Force and The Law of Gravity
 Chapter 8 Centripetal Force and The Law of Gravity Centripetal Acceleration An object traveling in a circle, even though it moves with a constant speed, will have an acceleration The centripetal acceleration
Chapter 8 Centripetal Force and The Law of Gravity Centripetal Acceleration An object traveling in a circle, even though it moves with a constant speed, will have an acceleration The centripetal acceleration
Statics : Rigid Bodies
 Statics : Rigid Bodies The Moment of a Force The moment M (turning effect) of a force about a point O is the product of the magnitude of the force (F) and the perp. distance (x)to the point of application.
Statics : Rigid Bodies The Moment of a Force The moment M (turning effect) of a force about a point O is the product of the magnitude of the force (F) and the perp. distance (x)to the point of application.
Static Equilibrium. Lecture 24. Chapter 12. Physics I. Department of Physics and Applied Physics
 Lecture 24 Chapter 12 Physics I Static Equilibrium Course website: http://faculty.uml.edu/andriy_danylov/teaching/physicsi IN THIS CHAPTER, you will discuss static equilibrium of an object Today we are
Lecture 24 Chapter 12 Physics I Static Equilibrium Course website: http://faculty.uml.edu/andriy_danylov/teaching/physicsi IN THIS CHAPTER, you will discuss static equilibrium of an object Today we are
15. LECTURE 15. I can calculate the dot product of two vectors and interpret its meaning. I can find the projection of one vector onto another one.
 5. LECTURE 5 Objectives I can calculate the dot product of two vectors and interpret its meaning. I can find the projection of one vector onto another one. In the last few lectures, we ve learned that
5. LECTURE 5 Objectives I can calculate the dot product of two vectors and interpret its meaning. I can find the projection of one vector onto another one. In the last few lectures, we ve learned that
Chapter 7: Bending and Shear in Simple Beams
 Chapter 7: Bending and Shear in Simple Beams Introduction A beam is a long, slender structural member that resists loads that are generally applied transverse (perpendicular) to its longitudinal axis.
Chapter 7: Bending and Shear in Simple Beams Introduction A beam is a long, slender structural member that resists loads that are generally applied transverse (perpendicular) to its longitudinal axis.
Ishik University / Sulaimani Civil Engineering Department. Chapter -2-
 Ishik University / Sulaimani Civil Engineering Department Chapter -- 1 orce Vectors Contents : 1. Scalars and Vectors. Vector Operations 3. Vector Addition of orces 4. Addition of a System of Coplanar
Ishik University / Sulaimani Civil Engineering Department Chapter -- 1 orce Vectors Contents : 1. Scalars and Vectors. Vector Operations 3. Vector Addition of orces 4. Addition of a System of Coplanar
Engineering Mechanics. Equivalent force systems: problems
 Engineering Mechanics Equivalent force systems: problems A 36-N force is applied to a wrench to tighten a showerhead. Knowing that the centerline of the wrench is parallel to the x axis. Determine the
Engineering Mechanics Equivalent force systems: problems A 36-N force is applied to a wrench to tighten a showerhead. Knowing that the centerline of the wrench is parallel to the x axis. Determine the
CPS lesson Magnetism ANSWER KEY
 CPS lesson Magnetism ANSWER KEY 1. Two wire strips carry currents from P to Q and from R to S. If the current directions in both wires are reversed, the net magnetic force of strip 1 on strip 2: * A. remains
CPS lesson Magnetism ANSWER KEY 1. Two wire strips carry currents from P to Q and from R to S. If the current directions in both wires are reversed, the net magnetic force of strip 1 on strip 2: * A. remains
Moments and Torques. M = F d
 Moments and Torques When a force is applied to an object, the object reacts in six possible ways. It can elongate, compress, translate (moves left, right, up, down, etc.), bend, twist or rotate. The study
Moments and Torques When a force is applied to an object, the object reacts in six possible ways. It can elongate, compress, translate (moves left, right, up, down, etc.), bend, twist or rotate. The study
FORCE ANALYSIS OF MACHINERY. School of Mechanical & Industrial Engineering, AAiT
 1 FORCE ANALYSIS OF MACHINERY School of Mechanical & Industrial Engineering, AAiT INTRODUCTION 2 A machine is a device that performs work and, as such, transmits energy by means mechanical force from a
1 FORCE ANALYSIS OF MACHINERY School of Mechanical & Industrial Engineering, AAiT INTRODUCTION 2 A machine is a device that performs work and, as such, transmits energy by means mechanical force from a
- Beams are structural member supporting lateral loadings, i.e., these applied perpendicular to the axes.
 4. Shear and Moment functions - Beams are structural member supporting lateral loadings, i.e., these applied perpendicular to the aes. - The design of such members requires a detailed knowledge of the
4. Shear and Moment functions - Beams are structural member supporting lateral loadings, i.e., these applied perpendicular to the aes. - The design of such members requires a detailed knowledge of the
Chapter 12: Rotation of Rigid Bodies. Center of Mass Moment of Inertia Torque Angular Momentum Rolling Statics
 Chapter 1: Rotation of Rigid Bodies Center of Mass Moment of Inertia Torque Angular Momentum Rolling Statics Translational vs Rotational / / 1/ m x v dx dt a dv dt F ma p mv KE mv Work Fd P Fv / / 1/ I
Chapter 1: Rotation of Rigid Bodies Center of Mass Moment of Inertia Torque Angular Momentum Rolling Statics Translational vs Rotational / / 1/ m x v dx dt a dv dt F ma p mv KE mv Work Fd P Fv / / 1/ I
Appendix. Vectors, Systems of Equations
 ppendix Vectors, Systems of Equations Vectors, Systems of Equations.1.1 Vectors Scalar physical quantities (e.g., time, mass, density) possess only magnitude. Vectors are physical quantities (e.g., force,
ppendix Vectors, Systems of Equations Vectors, Systems of Equations.1.1 Vectors Scalar physical quantities (e.g., time, mass, density) possess only magnitude. Vectors are physical quantities (e.g., force,
UNIT-V MOMENT DISTRIBUTION METHOD
 UNIT-V MOMENT DISTRIBUTION METHOD Distribution and carryover of moments Stiffness and carry over factors Analysis of continuous beams Plane rigid frames with and without sway Neylor s simplification. Hardy
UNIT-V MOMENT DISTRIBUTION METHOD Distribution and carryover of moments Stiffness and carry over factors Analysis of continuous beams Plane rigid frames with and without sway Neylor s simplification. Hardy
CH. 4 BEAMS & COLUMNS
 CH. 4 BEAMS & COLUMNS BEAMS Beams Basic theory of bending: internal resisting moment at any point in a beam must equal the bending moments produced by the external loads on the beam Rx = Cc + Tt - If the
CH. 4 BEAMS & COLUMNS BEAMS Beams Basic theory of bending: internal resisting moment at any point in a beam must equal the bending moments produced by the external loads on the beam Rx = Cc + Tt - If the
Torque and Rotational Equilibrium
 Torque and Rotational Equilibrium Theory Torque is the rotational analog of force. If you want something to move (translate), you apply a force; if you want something to rotate, you apply a torque. Torque
Torque and Rotational Equilibrium Theory Torque is the rotational analog of force. If you want something to move (translate), you apply a force; if you want something to rotate, you apply a torque. Torque
UNIT - I. Review of the three laws of motion and vector algebra
 UNIT - I Review of the three laws of motion and vector algebra In this course on Engineering Mechanics, we shall be learning about mechanical interaction between bodies. That is we will learn how different
UNIT - I Review of the three laws of motion and vector algebra In this course on Engineering Mechanics, we shall be learning about mechanical interaction between bodies. That is we will learn how different
If the pull is downward (Fig. 1), we want C to point into the page. If the pull is upward (Fig. 2), we want C to point out of the page.
, we want C to point into the page. If the pull is upward (Fig. 2), we want C to point out of the page.") 11.5 Cross Product Contemporary Calculus 1 11.5 CROSS PRODUCT This section is the final one about the arithmetic of vectors, and it introduces a second type of vector vector multiplication called the cross
11.5 Cross Product Contemporary Calculus 1 11.5 CROSS PRODUCT This section is the final one about the arithmetic of vectors, and it introduces a second type of vector vector multiplication called the cross
[8] Bending and Shear Loading of Beams
![[8] Bending and Shear Loading of Beams](/thumbs/92/110949676.jpg "[8] Bending and Shear Loading of Beams") [8] Bending and Shear Loading of Beams Page 1 of 28 [8] Bending and Shear Loading of Beams [8.1] Bending of Beams (will not be covered in class) [8.2] Bending Strain and Stress [8.3] Shear in Straight
[8] Bending and Shear Loading of Beams Page 1 of 28 [8] Bending and Shear Loading of Beams [8.1] Bending of Beams (will not be covered in class) [8.2] Bending Strain and Stress [8.3] Shear in Straight
Method of Virtual Work Frame Deflection Example Steven Vukazich San Jose State University
 Method of Virtual Work Frame Deflection xample Steven Vukazich San Jose State University Frame Deflection xample 9 k k D 4 ft θ " # The statically determinate frame from our previous internal force diagram
Method of Virtual Work Frame Deflection xample Steven Vukazich San Jose State University Frame Deflection xample 9 k k D 4 ft θ " # The statically determinate frame from our previous internal force diagram
Chapter 2: Numeric, Cell, and Structure Arrays
 Chapter 2: Numeric, Cell, and Structure Arrays Topics Covered: Vectors Definition Addition Multiplication Scalar, Dot, Cross Matrices Row, Column, Square Transpose Addition Multiplication Scalar-Matrix,
Chapter 2: Numeric, Cell, and Structure Arrays Topics Covered: Vectors Definition Addition Multiplication Scalar, Dot, Cross Matrices Row, Column, Square Transpose Addition Multiplication Scalar-Matrix,
EQUATIONS OF EQUILIBRIUM & TWO- AND THREE-FORCE MEMEBERS
 EQUATIONS OF EQUILIBRIUM & TWO- AND THREE-FORCE MEMEBERS Today s Objectives: Students will be able to: a) Apply equations of equilibrium to solve for unknowns, and b) Recognize two-force members. In-Class
EQUATIONS OF EQUILIBRIUM & TWO- AND THREE-FORCE MEMEBERS Today s Objectives: Students will be able to: a) Apply equations of equilibrium to solve for unknowns, and b) Recognize two-force members. In-Class
Chap10. Rotation of a Rigid Object about a Fixed Axis
 Chap10. Rotation of a Rigid Object about a Fixed Axis Level : AP Physics Teacher : Kim 10.1 Angular Displacement, Velocity, and Acceleration - A rigid object rotating about a fixed axis through O perpendicular
Chap10. Rotation of a Rigid Object about a Fixed Axis Level : AP Physics Teacher : Kim 10.1 Angular Displacement, Velocity, and Acceleration - A rigid object rotating about a fixed axis through O perpendicular
Name. MECH 223 Engineering Statics. Midterm 1, February 24 th 2015
 1 Name MECH 223 Engineering Statics Midterm 1, February 24 th 2015 Question 1 (20 + 5 points) (a) (5 points) Form the vector products B C and B C (where B = B ) and use the result to prove the identity
1 Name MECH 223 Engineering Statics Midterm 1, February 24 th 2015 Question 1 (20 + 5 points) (a) (5 points) Form the vector products B C and B C (where B = B ) and use the result to prove the identity
Spring 2018 Lecture 28 Exam Review
 Statics - TAM 210 & TAM 211 Spring 2018 Lecture 28 Exam Review Announcements Concept Inventory: Ungraded assessment of course knowledge Extra credit: Complete #1 or #2 for 0.5 out of 100 pt of final grade
Statics - TAM 210 & TAM 211 Spring 2018 Lecture 28 Exam Review Announcements Concept Inventory: Ungraded assessment of course knowledge Extra credit: Complete #1 or #2 for 0.5 out of 100 pt of final grade
Magnetic Force Acting on a Current- Carrying Conductor IL B
 Magnetic Force Acting on a Current- Carrying Conductor A segment of a current-carrying wire in a magnetic field. The magnetic force exerted on each charge making up the current is qvd and the net force
Magnetic Force Acting on a Current- Carrying Conductor A segment of a current-carrying wire in a magnetic field. The magnetic force exerted on each charge making up the current is qvd and the net force
LECTURE 15 TORQUE AND CENTER OF GRAVITY
 LECTURE 15 TORQUE AND CENTER OF GRAVITY 7.3 Torque Net torque 7.4 Gravitational torque and the center of gravity Calculating the position of the center of gravity What is unusual about this door? Learning
LECTURE 15 TORQUE AND CENTER OF GRAVITY 7.3 Torque Net torque 7.4 Gravitational torque and the center of gravity Calculating the position of the center of gravity What is unusual about this door? Learning