FE Statics Review. Sanford Meek Department of Mechanical Engineering Kenn 226 (801)
|
|
|
- Paula Harrington
- 5 years ago
- Views:
Transcription
1 FE Statics Review Sanford Meek Department of Mechanical Engineering Kenn 226 (801)
2 Statics! forces = 0!moments = 0 2
3 Vectors Scalars have magnitude only Vectors have magnitude and direction 3
4 Vectors Vector addition and subtraction! A +! B =! R A B!!! R! B = A R A B R A -B 4
5 Vectors Resultants Law of sines sin! A = sin " B = sin# C Law of cosines C β A α γ B C 2 = A 2 + B 2! 2ABcos! 5
6 Vectors Cartesian coordinates The only system that is generally used in statics x, y, z axes i, j, k unit vectors 6
7 Vectors! A = A ˆi + A ˆj + A kˆ x y z ˆk  ĵ A = maga! = A + A + A x y z î! ˆ A! Ax " ˆ! Ay " ˆ! Az " A = = ˆ # $ i + # $ j+ # $ k A % A & % A & % A & 7
8 Direction cosines The components of the UNIT vector,! ˆ A! Ax " ˆ! Ay " ˆ! Az " A = = ˆ # $ i + # $ j+ # $ k A % A & % A & % A & are the cosines of the angles made by the vector with the coordinate axes. cos! = cos " = cos# = Ax A A y A Az A cos! cos " cos # = 8
9 Position Vectors! r = x î + y ĵ+ z ˆk! A A A A r = x î + y ĵ+ z ˆk B B B B Final point (head of arrow) initial point (tail of arrow)! r = ( x! x )î + ( y AB B B! y ) A ĵ+ ( z B! z ) ˆk A 9
ˆi + (!")
10 Force Vectors Simply the force magnitude times the unit position vector!! ˆ rab F = FF = Frˆ AB = F rab! r = (! AB 5')ˆi + (! 3'cos20 )ˆj + (3'sin ') kˆ 10
11 Dot Product Use: find the component of a vector along a certain direction component of force along a particular axis!! AiB!! AiB = AB cos! = A B + A B + A B x x y y z z A!! 11
12 Dot Product Use: find the component of a vector along a certain direction component of force along a particular axis The result is a scalar.!! AiB!! AiB = AB cos! = A B + A B + A B x x y y z z A!! 12
13 What part of A is aligned with the line? Dot Product What part is perpendicular?! A! = A! " A! a =perpendicular part uˆ a! A a = A cos! uˆ a! A cos! = A i uˆ Projected component (scalar): a 13

14 Moment (Torque) Only the perpendicular part of force gives torque 14



15 Cross Product Remember Right Hand Rule IEEE logo 15
16 Cross Product In terms of i, j, k i x j = k j x k = i k x i = j j x i = -k k x j = -i i x k = -j i x i = 0 j x j = 0 k x k = 0 i j k i positive i j k i negative 16


17 Moment of a Force Primary use of the cross product in statics posibon vector from O to any point on the line of acbon of F 17

18 Moment About an Axis Triple scalar product In this application, axis a is the y-axis, making unit axis vector u a simply base vector j. 18
19 Resultant Moments 19
20 Resultant Moments 20
21 Equal and opposite forces acting at a distance Force Couples answers.com No net force 21
22 Force Couples These all have the same net moment! Q: Why is this a useful observabon? A: It speeds up computabons. Look for couples! 22
23 Force Couples r! d! r = vector connecting any two points on lines of action d! F = perpendicular distance between forces! = The force at the tip of r M!! = r! F! M = Fd 23
24 Equivalent Force-Moment Systems PRINCIPLE OF TRANSMISSIBILITY P P F d F For both of these, the equivalent load at P is the same You can slide any force along its line of action without affecting the equivalent load! M=Fd F 24

 M R O F For these, you can always find a location to place the net force such")
25 Equivalent Force-Moment Systems An equivalent shifted force always exists for a set of coplanar forces. The net force for coplanar forces is itself in the plane. The moment for coplanar forces is perpendicular to the plane. d = ( ) M R O F For these, you can always find a location to place the net force such that the moment about O is unchanged. 25


26 Distributed Loads Demand the moment to be the same: 26
27 Equilibrium! forces = 0!moments = 0 No acceleration at rest or constant velocity 27
28 Equilibrium Free Body Diagram Define coordinate system Write all known and unknown forces and moments in terms of the coordinate system Sum all forces to zero Sum all moments to zero 28


29 Support Reactions zero horizontal resistance. has vertical resistance. zero moment resistance. has horizontal resistance. has vertical resistance. has moment resistance. has horizontal resistance. has vertical resistance. zero moment resistance. 29
30 Two-Force Members A two- force member is a body or part that is subjected to exactly two forces, and no moments. The equilibrium equabons then imply that those two forces must be equal in magnitude, opposite in direcbon, and be collinear (i.e., act along the same line of ac4on.) 30



31 Trusses A structure composed of two-force members tension or compression Loads are applied only at the joints Joints are frictionless pins Member weight is insignificant Usually, one support is a roller to allow expansion and contraction from temperature changes 31
 T C Method of")



32 Trusses Method of Joints FBD at each joint (pin joints) T C Method of joints: apply force balance at pins. Since force balance has only two equabons (ΣF x =0 and ΣF x =0), pick joints that have only two unknown forces! Force balance gives: T As part of your checks, first guess tension T or compression C. 32
 FBD has only axial load! Links must be two- force members.")
33 Trusses Method of Joints FBD at each joint (pin joints) Joint (pin) FBD has the applied loads and link loads. Link (spar or element) FBD has only axial load! Links must be two- force members. (thus equal and opposite forces) 33

34 Trusses Method of sections make a cut in the structure 34

 to get the 3")
35 Trusses Method of sections: Make cuts with no more than 3 unknowns. Apply 3 statics equations (ΣF x =0, ΣF y =0, ΣM=0) to get the 3 unknowns! 35
36 Trusses Steps for solving truss problems Find the reactions by looking at the truss as a single rigid body Use the method of joints if the unknown forces to be solved are near or at the joint with a known (applied) force. Use the method of sections if the unknown forces to be solved are not at or near the known (applied) forces. 36



37 Frames Not necessarily two-force members loads can be applied anywhere on themembers 37

38 Frames Internal forces They don t appear in this FBD: 38

39 Internal Forces Make a virtual cut in a member and analyze the internal forces 39

40 Internal Forces Sign conventions 40

41 Internal Forces Load, shear, and moment relationships Shear is the integral of the load Moment is the integral of the shear Beam slope is the integral of the moment Beam deflection is the integral of the slope 41
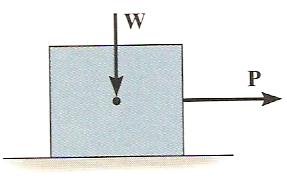
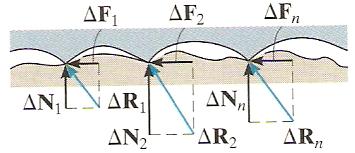
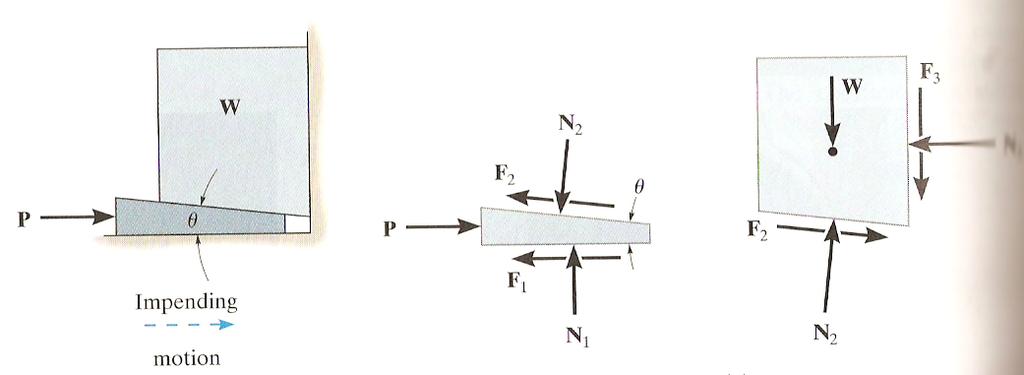
42 Friction configuration matters! 42

43 Friction To be in equilibrium, friction is however large it needs to be treated as a pin support at an unknown location N F = = W P ( F! µ N ) moment balance: 43
44 Friction Impeding motion Frictional limit: At some point, P will reach a peak value, F s, large enough to start dragging the block. F s = µ s N 44
45 Friction F = µ s N F = µ k N 45
46 Friction F! µ s N ( F = µ N only at impending motion) s Methodology: assume that fricbon is a pin support located at an unknown posibon. Find these three unknowns (horizontal and verbcal pin reacbons, as well as pin locabon) by enforcing three equabons of equilibrium. Validate no slip assumpbon by confirming that F < µ s N. 46
47 Friction To slip, both ends must slip, which implies that BOTH ends will be at impending slip. Seing F A = µ A N A and F B = µ B N B, the FBD has THREE unknowns: N A, N B, and angle θ. Use the THREE equilibrium equabons to solve for them! Answer: 47
48 Wedges 48
49 Screws Screws are wedges around a cylinder How many threads? Lead = Number of threads x Pitch Pitch = 1/(number of threads per inch) 49
50 Screws Upward Motion Self locking 50
51 Screws Downward Motion Non- self- locking FricBon angle is smaller than the thread (wedge) angle The moment must resist the mobon Self- locking FricBon angle is bigger than the thread (wedge) angle The moment must start the mobon 51
52 Belts Tension is different at each end because of fricbon! (Contrast with a pully) 52

53 Belts dt " = µ d! T 53
54 Belts Tension increases in the direction of impending motion T T 2 1! = e µ (! 2 "! 1) 2! 1 If fricbonless (µ=0), then T 2 = T 1 (like pulley). With fricbon, however, T 2 > T 1 (consistent with limit µ ). Usually written as: where β is the angle of contact 54


55 Moment of Inertia about an axis polar moment of inerba

56 Moment of Inertia Parallel axis theorem Use this if you know Moment of Inertia about the primed axes passing thru the centroid, but you seek it with respect to some different set of parallel axes. d 2 = dx 2 + dy 2
57 Moment of Inertia Radius of Gyration The equivalent moment of inertia of a body that is a point mass at a distance (the radius of gyration) from the axis. Ix = Akx 2 kx = I x A Iy = Aky 2 ky = I y A I o = Ak o 2 ko = I o A
58 Moment of Inertia Moment of inertia for Composite Areas: Add them together (subtract for holes). Make sure that all the moments of inertia for all parts are found about the same axis. Use tables and parallel axis theorem.
59 Centroids - Lines
60 Centroids - Areas

61 Centroids Composite Bodies
FE Sta'cs Review. Torch Ellio0 (801) MCE room 2016 (through 2000B door)
 MCE room 2016 (through 2000B door)") FE Sta'cs Review h0p://www.coe.utah.edu/current- undergrad/fee.php Scroll down to: Sta'cs Review - Slides Torch Ellio0 ellio0@eng.utah.edu (801) 587-9016 MCE room 2016 (through 2000B door) Posi'on and
FE Sta'cs Review h0p://www.coe.utah.edu/current- undergrad/fee.php Scroll down to: Sta'cs Review - Slides Torch Ellio0 ellio0@eng.utah.edu (801) 587-9016 MCE room 2016 (through 2000B door) Posi'on and
REVIEW. Final Exam. Final Exam Information. Final Exam Information. Strategy for Studying. Test taking strategy. Sign Convention Rules
 Final Exam Information REVIEW Final Exam (Print notes) DATE: WEDNESDAY, MAY 12 TIME: 1:30 PM - 3:30 PM ROOM ASSIGNMENT: Toomey Hall Room 199 1 2 Final Exam Information Comprehensive exam covers all topics
Final Exam Information REVIEW Final Exam (Print notes) DATE: WEDNESDAY, MAY 12 TIME: 1:30 PM - 3:30 PM ROOM ASSIGNMENT: Toomey Hall Room 199 1 2 Final Exam Information Comprehensive exam covers all topics
STATICS. FE Review. Statics, Fourteenth Edition R.C. Hibbeler. Copyright 2016 by Pearson Education, Inc. All rights reserved.
 STATICS FE Review 1. Resultants of force systems VECTOR OPERATIONS (Section 2.2) Scalar Multiplication and Division VECTOR ADDITION USING EITHER THE PARALLELOGRAM LAW OR TRIANGLE Parallelogram Law: Triangle
STATICS FE Review 1. Resultants of force systems VECTOR OPERATIONS (Section 2.2) Scalar Multiplication and Division VECTOR ADDITION USING EITHER THE PARALLELOGRAM LAW OR TRIANGLE Parallelogram Law: Triangle
F R. + F 3x. + F 2y. = (F 1x. j + F 3x. i + F 2y. i F 3y. i + F 1y. j F 2x. ) i + (F 1y. ) j. F 2x. F 3y. = (F ) i + (F ) j. ) j
 i + (F 1y. ) j. F 2x. F 3y. = (F ) i + (F ) j. ) j") General comments: closed book and notes but optional one page crib sheet allowed. STUDY: old exams, homework and power point lectures! Key: make sure you can solve your homework problems and exam problems.
General comments: closed book and notes but optional one page crib sheet allowed. STUDY: old exams, homework and power point lectures! Key: make sure you can solve your homework problems and exam problems.
TABLE OF CONTENTS. Preface...
 TABLE OF CONTENTS Preface...................................... xiv 1 Introduction........................................ 1 1.1 Engineering and Statics.............................. 1 1.2 A Brief History
TABLE OF CONTENTS Preface...................................... xiv 1 Introduction........................................ 1 1.1 Engineering and Statics.............................. 1 1.2 A Brief History
E 490 FE Exam Prep. Engineering Mechanics
 E 490 FE Exam Prep Engineering Mechanics 2008 E 490 Course Topics Statics Newton s Laws of Motion Resultant Force Systems Moment of Forces and Couples Equilibrium Pulley Systems Trusses Centroid of an
E 490 FE Exam Prep Engineering Mechanics 2008 E 490 Course Topics Statics Newton s Laws of Motion Resultant Force Systems Moment of Forces and Couples Equilibrium Pulley Systems Trusses Centroid of an
Final Exam - Spring
 EM121 Final Exam - Spring 2011-2012 Name : Section Number : Record all your answers to the multiple choice problems (1-15) by filling in the appropriate circle. All multiple choice answers will be graded
EM121 Final Exam - Spring 2011-2012 Name : Section Number : Record all your answers to the multiple choice problems (1-15) by filling in the appropriate circle. All multiple choice answers will be graded
The case where there is no net effect of the forces acting on a rigid body
 The case where there is no net effect of the forces acting on a rigid body Outline: Introduction and Definition of Equilibrium Equilibrium in Two-Dimensions Special cases Equilibrium in Three-Dimensions
The case where there is no net effect of the forces acting on a rigid body Outline: Introduction and Definition of Equilibrium Equilibrium in Two-Dimensions Special cases Equilibrium in Three-Dimensions
Vector Mechanics: Statics
 PDHOnline Course G492 (4 PDH) Vector Mechanics: Statics Mark A. Strain, P.E. 2014 PDH Online PDH Center 5272 Meadow Estates Drive Fairfax, VA 22030-6658 Phone & Fax: 703-988-0088 www.pdhonline.org www.pdhcenter.com
PDHOnline Course G492 (4 PDH) Vector Mechanics: Statics Mark A. Strain, P.E. 2014 PDH Online PDH Center 5272 Meadow Estates Drive Fairfax, VA 22030-6658 Phone & Fax: 703-988-0088 www.pdhonline.org www.pdhcenter.com
STATICS SECOND EDITION
 Engineering Mechanics STATICS SECOND EDITION Michael E. Plesha Department of Engineering Physics University of Wisconsin-Madison Gary L. Gray Department of Engineering Science and Mechanics Penn State
Engineering Mechanics STATICS SECOND EDITION Michael E. Plesha Department of Engineering Physics University of Wisconsin-Madison Gary L. Gray Department of Engineering Science and Mechanics Penn State
ME 201 Engineering Mechanics: Statics. Final Exam Review
 ME 201 Engineering Mechanics: Statics inal Exam Review inal Exam Testing Center (Proctored, 1 attempt) Opens: Monday, April 9 th Closes : riday, April 13 th Test ormat 15 Problems 10 Multiple Choice (75%)
ME 201 Engineering Mechanics: Statics inal Exam Review inal Exam Testing Center (Proctored, 1 attempt) Opens: Monday, April 9 th Closes : riday, April 13 th Test ormat 15 Problems 10 Multiple Choice (75%)
Spring 2018 Lecture 28 Exam Review
 Statics - TAM 210 & TAM 211 Spring 2018 Lecture 28 Exam Review Announcements Concept Inventory: Ungraded assessment of course knowledge Extra credit: Complete #1 or #2 for 0.5 out of 100 pt of final grade
Statics - TAM 210 & TAM 211 Spring 2018 Lecture 28 Exam Review Announcements Concept Inventory: Ungraded assessment of course knowledge Extra credit: Complete #1 or #2 for 0.5 out of 100 pt of final grade
Unit 21 Couples and Resultants with Couples
 Unit 21 Couples and Resultants with Couples Page 21-1 Couples A couple is defined as (21-5) Moment of Couple The coplanar forces F 1 and F 2 make up a couple and the coordinate axes are chosen so that
Unit 21 Couples and Resultants with Couples Page 21-1 Couples A couple is defined as (21-5) Moment of Couple The coplanar forces F 1 and F 2 make up a couple and the coordinate axes are chosen so that
Overview. Dry Friction Wedges Flatbelts Screws Bearings Rolling Resistance
 Friction Chapter 8 Overview Dry Friction Wedges Flatbelts Screws Bearings Rolling Resistance Dry Friction Friction is defined as a force of resistance acting on a body which prevents slipping of the body
Friction Chapter 8 Overview Dry Friction Wedges Flatbelts Screws Bearings Rolling Resistance Dry Friction Friction is defined as a force of resistance acting on a body which prevents slipping of the body
Moment of a force (scalar, vector ) Cross product Principle of Moments Couples Force and Couple Systems Simple Distributed Loading
 Cross product Principle of Moments Couples Force and Couple Systems Simple Distributed Loading") Chapter 4 Moment of a force (scalar, vector ) Cross product Principle of Moments Couples Force and Couple Systems Simple Distributed Loading The moment of a force about a point provides a measure of the
Chapter 4 Moment of a force (scalar, vector ) Cross product Principle of Moments Couples Force and Couple Systems Simple Distributed Loading The moment of a force about a point provides a measure of the
VALLIAMMAI ENGINEERING COLLEGE SRM NAGAR, KATTANKULATHUR DEPARTMENT OF MECHANICAL ENGINEERING
 VALLIAMMAI ENGINEERING COLLEGE SRM NAGAR, KATTANKULATHUR 603203 DEPARTMENT OF MECHANICAL ENGINEERING BRANCH: MECHANICAL YEAR / SEMESTER: I / II UNIT 1 PART- A 1. State Newton's three laws of motion? 2.
VALLIAMMAI ENGINEERING COLLEGE SRM NAGAR, KATTANKULATHUR 603203 DEPARTMENT OF MECHANICAL ENGINEERING BRANCH: MECHANICAL YEAR / SEMESTER: I / II UNIT 1 PART- A 1. State Newton's three laws of motion? 2.
Ishik University / Sulaimani Architecture Department. Structure. ARCH 214 Chapter -5- Equilibrium of a Rigid Body
 Ishik University / Sulaimani Architecture Department 1 Structure ARCH 214 Chapter -5- Equilibrium of a Rigid Body CHAPTER OBJECTIVES To develop the equations of equilibrium for a rigid body. To introduce
Ishik University / Sulaimani Architecture Department 1 Structure ARCH 214 Chapter -5- Equilibrium of a Rigid Body CHAPTER OBJECTIVES To develop the equations of equilibrium for a rigid body. To introduce
KINGS COLLEGE OF ENGINEERING ENGINEERING MECHANICS QUESTION BANK UNIT I - PART-A
 KINGS COLLEGE OF ENGINEERING ENGINEERING MECHANICS QUESTION BANK Sub. Code: CE1151 Sub. Name: Engg. Mechanics UNIT I - PART-A Sem / Year II / I 1.Distinguish the following system of forces with a suitable
KINGS COLLEGE OF ENGINEERING ENGINEERING MECHANICS QUESTION BANK Sub. Code: CE1151 Sub. Name: Engg. Mechanics UNIT I - PART-A Sem / Year II / I 1.Distinguish the following system of forces with a suitable
2. a) Explain the equilibrium of i) Concurrent force system, and ii) General force system.
 Explain the equilibrium of i) Concurrent force system, and ii) General force system.") Code No: R21031 R10 SET - 1 II B. Tech I Semester Supplementary Examinations Dec 2013 ENGINEERING MECHANICS (Com to ME, AE, AME, MM) Time: 3 hours Max. Marks: 75 Answer any FIVE Questions All Questions
Code No: R21031 R10 SET - 1 II B. Tech I Semester Supplementary Examinations Dec 2013 ENGINEERING MECHANICS (Com to ME, AE, AME, MM) Time: 3 hours Max. Marks: 75 Answer any FIVE Questions All Questions
Equilibrium of a Rigid Body. Engineering Mechanics: Statics
 Equilibrium of a Rigid Body Engineering Mechanics: Statics Chapter Objectives Revising equations of equilibrium of a rigid body in 2D and 3D for the general case. To introduce the concept of the free-body
Equilibrium of a Rigid Body Engineering Mechanics: Statics Chapter Objectives Revising equations of equilibrium of a rigid body in 2D and 3D for the general case. To introduce the concept of the free-body
Static Equilibrium. University of Arizona J. H. Burge
 Static Equilibrium Static Equilibrium Definition: When forces acting on an object which is at rest are balanced, then the object is in a state of static equilibrium. - No translations - No rotations In
Static Equilibrium Static Equilibrium Definition: When forces acting on an object which is at rest are balanced, then the object is in a state of static equilibrium. - No translations - No rotations In
Phys101 First Major-111 Zero Version Monday, October 17, 2011 Page: 1
 Monday, October 17, 011 Page: 1 Q1. 1 b The speed-time relation of a moving particle is given by: v = at +, where v is the speed, t t + c is the time and a, b, c are constants. The dimensional formulae
Monday, October 17, 011 Page: 1 Q1. 1 b The speed-time relation of a moving particle is given by: v = at +, where v is the speed, t t + c is the time and a, b, c are constants. The dimensional formulae
Physics 101 Lecture 11 Torque
 Physics 101 Lecture 11 Torque Dr. Ali ÖVGÜN EMU Physics Department www.aovgun.com Force vs. Torque q Forces cause accelerations q What cause angular accelerations? q A door is free to rotate about an axis
Physics 101 Lecture 11 Torque Dr. Ali ÖVGÜN EMU Physics Department www.aovgun.com Force vs. Torque q Forces cause accelerations q What cause angular accelerations? q A door is free to rotate about an axis
Math Review 1: Vectors
 Math Review 1: Vectors Coordinate System Coordinate system: used to describe the position of a point in space and consists of 1. An origin as the reference point 2. A set of coordinate axes with scales
Math Review 1: Vectors Coordinate System Coordinate system: used to describe the position of a point in space and consists of 1. An origin as the reference point 2. A set of coordinate axes with scales
Math Review Night: Work and the Dot Product
 Math Review Night: Work and the Dot Product Dot Product A scalar quantity Magnitude: A B = A B cosθ The dot product can be positive, zero, or negative Two types of projections: the dot product is the parallel
Math Review Night: Work and the Dot Product Dot Product A scalar quantity Magnitude: A B = A B cosθ The dot product can be positive, zero, or negative Two types of projections: the dot product is the parallel
Eng Sample Test 4
 1. An adjustable tow bar connecting the tractor unit H with the landing gear J of a large aircraft is shown in the figure. Adjusting the height of the hook F at the end of the tow bar is accomplished by
1. An adjustable tow bar connecting the tractor unit H with the landing gear J of a large aircraft is shown in the figure. Adjusting the height of the hook F at the end of the tow bar is accomplished by
ENGINEERING MECHANICS
 ENGINEERING MECHANICS BASUDEB BHATTACHARYYA Assistant Professor Department of Applied Mechanics Bengal Engineering and Science University Shibpur, Howrah OXJFORD UNIVERSITY PRESS Contents Foreword Preface
ENGINEERING MECHANICS BASUDEB BHATTACHARYYA Assistant Professor Department of Applied Mechanics Bengal Engineering and Science University Shibpur, Howrah OXJFORD UNIVERSITY PRESS Contents Foreword Preface
A. B. C. D. E. v x. ΣF x
 Q4.3 The graph to the right shows the velocity of an object as a function of time. Which of the graphs below best shows the net force versus time for this object? 0 v x t ΣF x ΣF x ΣF x ΣF x ΣF x 0 t 0
Q4.3 The graph to the right shows the velocity of an object as a function of time. Which of the graphs below best shows the net force versus time for this object? 0 v x t ΣF x ΣF x ΣF x ΣF x ΣF x 0 t 0
Models and Anthropometry
 Learning Objectives Models and Anthropometry Readings: some of Chapter 8 [in text] some of Chapter 11 [in text] By the end of this lecture, you should be able to: Describe common anthropometric measurements
Learning Objectives Models and Anthropometry Readings: some of Chapter 8 [in text] some of Chapter 11 [in text] By the end of this lecture, you should be able to: Describe common anthropometric measurements
Outline: Frames Machines Trusses
 Outline: Frames Machines Trusses Properties and Types Zero Force Members Method of Joints Method of Sections Space Trusses 1 structures are made up of several connected parts we consider forces holding
Outline: Frames Machines Trusses Properties and Types Zero Force Members Method of Joints Method of Sections Space Trusses 1 structures are made up of several connected parts we consider forces holding
General Physics I. Lecture 9: Vector Cross Product. Prof. WAN, Xin ( 万歆 )
") General Physics I Lecture 9: Vector Cross Product Prof. WAN, Xin ( 万歆 ) xinwan@zju.edu.cn http://zimp.zju.edu.cn/~xinwan/ Outline Examples of the rotation of a rigid object about a fixed axis Force/torque
General Physics I Lecture 9: Vector Cross Product Prof. WAN, Xin ( 万歆 ) xinwan@zju.edu.cn http://zimp.zju.edu.cn/~xinwan/ Outline Examples of the rotation of a rigid object about a fixed axis Force/torque
EQUATIONS OF EQUILIBRIUM & TWO-AND THREE-FORCE MEMEBERS
 EQUATIONS OF EQUILIBRIUM & TWO-AND THREE-FORCE MEMEBERS Today s Objectives: Students will be able to: a) Apply equations of equilibrium to solve for unknowns, and, b) Recognize two-force members. READING
EQUATIONS OF EQUILIBRIUM & TWO-AND THREE-FORCE MEMEBERS Today s Objectives: Students will be able to: a) Apply equations of equilibrium to solve for unknowns, and, b) Recognize two-force members. READING
2.003 Engineering Dynamics Problem Set 4 (Solutions)
") .003 Engineering Dynamics Problem Set 4 (Solutions) Problem 1: 1. Determine the velocity of point A on the outer rim of the spool at the instant shown when the cable is pulled to the right with a velocity
.003 Engineering Dynamics Problem Set 4 (Solutions) Problem 1: 1. Determine the velocity of point A on the outer rim of the spool at the instant shown when the cable is pulled to the right with a velocity
Announcements. Equilibrium of a Rigid Body
 Announcements Equilibrium of a Rigid Body Today s Objectives Identify support reactions Draw a free body diagram Class Activities Applications Support reactions Free body diagrams Examples Engr221 Chapter
Announcements Equilibrium of a Rigid Body Today s Objectives Identify support reactions Draw a free body diagram Class Activities Applications Support reactions Free body diagrams Examples Engr221 Chapter
Equilibrium of a Particle
 ME 108 - Statics Equilibrium of a Particle Chapter 3 Applications For a spool of given weight, what are the forces in cables AB and AC? Applications For a given weight of the lights, what are the forces
ME 108 - Statics Equilibrium of a Particle Chapter 3 Applications For a spool of given weight, what are the forces in cables AB and AC? Applications For a given weight of the lights, what are the forces
EQUATIONS OF EQUILIBRIUM & TWO- AND THREE-FORCE MEMBERS
 EQUATIONS OF EQUILIBRIUM & TWO- AND THREE-FORCE MEMBERS Today s Objectives: Students will be able to: a) Apply equations of equilibrium to solve for unknowns, and, b) Recognize two-force members. APPLICATIONS
EQUATIONS OF EQUILIBRIUM & TWO- AND THREE-FORCE MEMBERS Today s Objectives: Students will be able to: a) Apply equations of equilibrium to solve for unknowns, and, b) Recognize two-force members. APPLICATIONS
STATICS. Friction VECTOR MECHANICS FOR ENGINEERS: Eighth Edition CHAPTER. Ferdinand P. Beer E. Russell Johnston, Jr.
 Eighth E 8 Friction CHAPTER VECTOR MECHANICS FOR ENGINEERS: STATICS Ferdinand P. Beer E. Russell Johnston, Jr. Lecture Notes: J. Walt Oler Texas Tech University Contents Introduction Laws of Dry Friction.
Eighth E 8 Friction CHAPTER VECTOR MECHANICS FOR ENGINEERS: STATICS Ferdinand P. Beer E. Russell Johnston, Jr. Lecture Notes: J. Walt Oler Texas Tech University Contents Introduction Laws of Dry Friction.
Name. ME 270 Fall 2005 Final Exam PROBLEM NO. 1. Given: A distributed load is applied to the top link which is, in turn, supported by link AC.
 Name ME 270 Fall 2005 Final Exam PROBLEM NO. 1 Given: A distributed load is applied to the top link which is, in turn, supported by link AC. Find: a) Draw a free body diagram of link BCDE and one of link
Name ME 270 Fall 2005 Final Exam PROBLEM NO. 1 Given: A distributed load is applied to the top link which is, in turn, supported by link AC. Find: a) Draw a free body diagram of link BCDE and one of link
STATICS Chapter 1 Introductory Concepts
 Contents Preface to Adapted Edition... (v) Preface to Third Edition... (vii) List of Symbols and Abbreviations... (xi) PART - I STATICS Chapter 1 Introductory Concepts 1-1 Scope of Mechanics... 1 1-2 Preview
Contents Preface to Adapted Edition... (v) Preface to Third Edition... (vii) List of Symbols and Abbreviations... (xi) PART - I STATICS Chapter 1 Introductory Concepts 1-1 Scope of Mechanics... 1 1-2 Preview
MECHANICS. Prepared by Engr. John Paul Timola
 MECHANICS Prepared by Engr. John Paul Timola MECHANICS a branch of the physical sciences that is concerned with the state of rest or motion of bodies that are subjected to the action of forces. subdivided
MECHANICS Prepared by Engr. John Paul Timola MECHANICS a branch of the physical sciences that is concerned with the state of rest or motion of bodies that are subjected to the action of forces. subdivided
Engineering Mechanics: Statics
 Engineering Mechanics: Statics Chapter 6B: Applications of Friction in Machines Wedges Used to produce small position adjustments of a body or to apply large forces When sliding is impending, the resultant
Engineering Mechanics: Statics Chapter 6B: Applications of Friction in Machines Wedges Used to produce small position adjustments of a body or to apply large forces When sliding is impending, the resultant
Appendix. Vectors, Systems of Equations
 ppendix Vectors, Systems of Equations Vectors, Systems of Equations.1.1 Vectors Scalar physical quantities (e.g., time, mass, density) possess only magnitude. Vectors are physical quantities (e.g., force,
ppendix Vectors, Systems of Equations Vectors, Systems of Equations.1.1 Vectors Scalar physical quantities (e.g., time, mass, density) possess only magnitude. Vectors are physical quantities (e.g., force,
 Name ME 270 Summer 2006 Examination No. 1 PROBLEM NO. 3 Given: Below is a Warren Bridge Truss. The total vertical height of the bridge is 10 feet and each triangle has a base of length, L = 8ft. Find:
Name ME 270 Summer 2006 Examination No. 1 PROBLEM NO. 3 Given: Below is a Warren Bridge Truss. The total vertical height of the bridge is 10 feet and each triangle has a base of length, L = 8ft. Find:
Physics UCSB TR 2:00-3:15 lecture Final Exam Wednesday 3/17/2010
 Physics @ UCSB TR :00-3:5 lecture Final Eam Wednesday 3/7/00 Print your last name: Print your first name: Print your perm no.: INSTRUCTIONS: DO NOT START THE EXAM until you are given instructions to do
Physics @ UCSB TR :00-3:5 lecture Final Eam Wednesday 3/7/00 Print your last name: Print your first name: Print your perm no.: INSTRUCTIONS: DO NOT START THE EXAM until you are given instructions to do
STATICS & DYNAMICS. Engineering Mechanics. Gary L. Gray. Francesco Costanzo. Michael E. Plesha. University of Wisconsin-Madison
 Engineering Mechanics STATICS & DYNAMICS SECOND EDITION Francesco Costanzo Department of Engineering Science and Mechanics Penn State University Michael E. Plesha Department of Engineering Physics University
Engineering Mechanics STATICS & DYNAMICS SECOND EDITION Francesco Costanzo Department of Engineering Science and Mechanics Penn State University Michael E. Plesha Department of Engineering Physics University
Mechanical Design in Optical Engineering
 OPTI Buckling Buckling and Stability: As we learned in the previous lectures, structures may fail in a variety of ways, depending on the materials, load and support conditions. We had two primary concerns:
OPTI Buckling Buckling and Stability: As we learned in the previous lectures, structures may fail in a variety of ways, depending on the materials, load and support conditions. We had two primary concerns:
Lesson 8. Luis Anchordoqui. Physics 168. Thursday, October 11, 18
 Lesson 8 Physics 168 1 Rolling 2 Intuitive Question Why is it that when a body is rolling on a plane without slipping the point of contact with the plane does not move? A simple answer to this question
Lesson 8 Physics 168 1 Rolling 2 Intuitive Question Why is it that when a body is rolling on a plane without slipping the point of contact with the plane does not move? A simple answer to this question
Engineering Mechanics: Statics in SI Units, 12e
 Engineering Mechanics: Statics in SI Units, 12e 5 Equilibrium of a Rigid Body Chapter Objectives Develop the equations of equilibrium for a rigid body Concept of the free-body diagram for a rigid body
Engineering Mechanics: Statics in SI Units, 12e 5 Equilibrium of a Rigid Body Chapter Objectives Develop the equations of equilibrium for a rigid body Concept of the free-body diagram for a rigid body
CH. 5 TRUSSES BASIC PRINCIPLES TRUSS ANALYSIS. Typical depth-to-span ratios range from 1:10 to 1:20. First: determine loads in various members
 CH. 5 TRUSSES BASIC PRINCIPLES Typical depth-to-span ratios range from 1:10 to 1:20 - Flat trusses require less overall depth than pitched trusses Spans: 40-200 Spacing: 10 to 40 on center - Residential
CH. 5 TRUSSES BASIC PRINCIPLES Typical depth-to-span ratios range from 1:10 to 1:20 - Flat trusses require less overall depth than pitched trusses Spans: 40-200 Spacing: 10 to 40 on center - Residential
PLANAR KINETICS OF A RIGID BODY FORCE AND ACCELERATION
 PLANAR KINETICS OF A RIGID BODY FORCE AND ACCELERATION I. Moment of Inertia: Since a body has a definite size and shape, an applied nonconcurrent force system may cause the body to both translate and rotate.
PLANAR KINETICS OF A RIGID BODY FORCE AND ACCELERATION I. Moment of Inertia: Since a body has a definite size and shape, an applied nonconcurrent force system may cause the body to both translate and rotate.
Concept of Force and Newton s Laws of Motion
 Concept of Force and Newton s Laws of Motion 8.01 W02D2 Chapter 7 Newton s Laws of Motion, Sections 7.1-7.4 Chapter 8 Applications of Newton s Second Law, Sections 8.1-8.4.1 Announcements W02D3 Reading
Concept of Force and Newton s Laws of Motion 8.01 W02D2 Chapter 7 Newton s Laws of Motion, Sections 7.1-7.4 Chapter 8 Applications of Newton s Second Law, Sections 8.1-8.4.1 Announcements W02D3 Reading
ENGINEERING MECHANICS SOLUTIONS UNIT-I
 LONG QUESTIONS ENGINEERING MECHANICS SOLUTIONS UNIT-I 1. A roller shown in Figure 1 is mass 150 Kg. What force P is necessary to start the roller over the block A? =90+25 =115 = 90+25.377 = 115.377 = 360-(115+115.377)
LONG QUESTIONS ENGINEERING MECHANICS SOLUTIONS UNIT-I 1. A roller shown in Figure 1 is mass 150 Kg. What force P is necessary to start the roller over the block A? =90+25 =115 = 90+25.377 = 115.377 = 360-(115+115.377)
Vectors and 2D Kinematics. AIT AP Physics C
 Vectors and 2D Kinematics Coordinate Systems Used to describe the position of a point in space Coordinate system consists of a fixed reference point called the origin specific axes with scales and labels
Vectors and 2D Kinematics Coordinate Systems Used to describe the position of a point in space Coordinate system consists of a fixed reference point called the origin specific axes with scales and labels
CEE 271: Applied Mechanics II, Dynamics Lecture 25: Ch.17, Sec.4-5
 1 / 36 CEE 271: Applied Mechanics II, Dynamics Lecture 25: Ch.17, Sec.4-5 Prof. Albert S. Kim Civil and Environmental Engineering, University of Hawaii at Manoa Date: 2 / 36 EQUATIONS OF MOTION: ROTATION
1 / 36 CEE 271: Applied Mechanics II, Dynamics Lecture 25: Ch.17, Sec.4-5 Prof. Albert S. Kim Civil and Environmental Engineering, University of Hawaii at Manoa Date: 2 / 36 EQUATIONS OF MOTION: ROTATION
Physics 1 Second Midterm Exam (AM) 2/25/2010
 2/25/2010") Physics Second Midterm Eam (AM) /5/00. (This problem is worth 40 points.) A roller coaster car of m travels around a vertical loop of radius R. There is no friction and no air resistance. At the top of
Physics Second Midterm Eam (AM) /5/00. (This problem is worth 40 points.) A roller coaster car of m travels around a vertical loop of radius R. There is no friction and no air resistance. At the top of
READING QUIZ. 2. When using the method of joints, typically equations of equilibrium are applied at every joint. A) Two B) Three C) Four D) Six
 Two B) Three C) Four D) Six") READING QUIZ 1. One of the assumptions used when analyzing a simple truss is that the members are joined together by. A) Welding B) Bolting C) Riveting D) Smooth pins E) Super glue 2. When using the method
READING QUIZ 1. One of the assumptions used when analyzing a simple truss is that the members are joined together by. A) Welding B) Bolting C) Riveting D) Smooth pins E) Super glue 2. When using the method
Chapter 11. Angular Momentum
 Chapter 11 Angular Momentum Angular Momentum Angular momentum plays a key role in rotational dynamics. There is a principle of conservation of angular momentum. In analogy to the principle of conservation
Chapter 11 Angular Momentum Angular Momentum Angular momentum plays a key role in rotational dynamics. There is a principle of conservation of angular momentum. In analogy to the principle of conservation
Chapter 4: Newton s Second Law F = m a. F = m a (4.2)
") Lecture 7: Newton s Laws and Their Applications 1 Chapter 4: Newton s Second Law F = m a First Law: The Law of Inertia An object at rest will remain at rest unless, until acted upon by an external force.
Lecture 7: Newton s Laws and Their Applications 1 Chapter 4: Newton s Second Law F = m a First Law: The Law of Inertia An object at rest will remain at rest unless, until acted upon by an external force.
SOLUTION 8 7. To hold lever: a+ M O = 0; F B (0.15) - 5 = 0; F B = N. Require = N N B = N 0.3. Lever,
 - 5 = 0; F B = N. Require = N N B = N 0.3. Lever,") 8 3. If the coefficient of static friction at is m s = 0.4 and the collar at is smooth so it only exerts a horizontal force on the pipe, determine the minimum distance x so that the bracket can support
8 3. If the coefficient of static friction at is m s = 0.4 and the collar at is smooth so it only exerts a horizontal force on the pipe, determine the minimum distance x so that the bracket can support
FALL TERM EXAM, PHYS 1211, INTRODUCTORY PHYSICS I Thursday, 11 December 2014, 6 PM to 9 PM, Field House Gym
 FALL TERM EXAM, PHYS 1211, INTRODUCTORY PHYSICS I Thursday, 11 December 2014, 6 PM to 9 PM, Field House Gym NAME: STUDENT ID: INSTRUCTION 1. This exam booklet has 13 pages. Make sure none are missing 2.
FALL TERM EXAM, PHYS 1211, INTRODUCTORY PHYSICS I Thursday, 11 December 2014, 6 PM to 9 PM, Field House Gym NAME: STUDENT ID: INSTRUCTION 1. This exam booklet has 13 pages. Make sure none are missing 2.
5 Equilibrium of a Rigid Body Chapter Objectives
 5 Equilibrium of a Rigid Body Chapter Objectives Develop the equations of equilibrium for a rigid body Concept of the free-body diagram for a rigid body Solve rigid-body equilibrium problems using the
5 Equilibrium of a Rigid Body Chapter Objectives Develop the equations of equilibrium for a rigid body Concept of the free-body diagram for a rigid body Solve rigid-body equilibrium problems using the
ENG202 Statics Lecture 16, Section 7.1
 ENG202 Statics Lecture 16, Section 7.1 Internal Forces Developed in Structural Members - Design of any structural member requires an investigation of the loading acting within the member in order to be
ENG202 Statics Lecture 16, Section 7.1 Internal Forces Developed in Structural Members - Design of any structural member requires an investigation of the loading acting within the member in order to be
PART-A. a. 60 N b. -60 N. c. 30 N d. 120 N. b. How you can get direction of Resultant R when number of forces acting on a particle in plane.
 V.S.. ENGINEERING OLLEGE, KRUR EPRTMENT OF MEHNIL ENGINEERING EMI YER: 2009-2010 (EVEN SEMESTER) ENGINEERING MEHNIS (MEH II SEM) QUESTION NK UNIT I PRT- EM QUESTION NK 1. efine Mechanics 2. What is meant
V.S.. ENGINEERING OLLEGE, KRUR EPRTMENT OF MEHNIL ENGINEERING EMI YER: 2009-2010 (EVEN SEMESTER) ENGINEERING MEHNIS (MEH II SEM) QUESTION NK UNIT I PRT- EM QUESTION NK 1. efine Mechanics 2. What is meant
Vector Operations. Vector Operations. Graphical Operations. Component Operations. ( ) ˆk
 ˆk") Vector Operations Vector Operations ME 202 Multiplication by a scalar Addition/subtraction Scalar multiplication (dot product) Vector multiplication (cross product) 1 2 Graphical Operations Component Operations
Vector Operations Vector Operations ME 202 Multiplication by a scalar Addition/subtraction Scalar multiplication (dot product) Vector multiplication (cross product) 1 2 Graphical Operations Component Operations
Engineering Mechanics: Statics
 Engineering Mechanics: Statics Chapter 2: Force Systems Part A: Two Dimensional Force Systems Force Force = an action of one body on another Vector quantity External and Internal forces Mechanics of Rigid
Engineering Mechanics: Statics Chapter 2: Force Systems Part A: Two Dimensional Force Systems Force Force = an action of one body on another Vector quantity External and Internal forces Mechanics of Rigid
Figure 1 Answer: = m
 Q1. Figure 1 shows a solid cylindrical steel rod of length =.0 m and diameter D =.0 cm. What will be increase in its length when m = 80 kg block is attached to its bottom end? (Young's modulus of steel
Q1. Figure 1 shows a solid cylindrical steel rod of length =.0 m and diameter D =.0 cm. What will be increase in its length when m = 80 kg block is attached to its bottom end? (Young's modulus of steel
Engineering Mechanics
 Engineering Mechanics Continued (5) Mohammed Ameen, Ph.D Professor of Civil Engineering B Section Forces in Beams Beams are thin prismatic members that are loaded transversely. Shear Force, Aial Force
Engineering Mechanics Continued (5) Mohammed Ameen, Ph.D Professor of Civil Engineering B Section Forces in Beams Beams are thin prismatic members that are loaded transversely. Shear Force, Aial Force
Chapter Objectives. Copyright 2011 Pearson Education South Asia Pte Ltd
 Chapter Objectives To develop the equations of equilibrium for a rigid body. To introduce the concept of the free-body diagram for a rigid body. To show how to solve rigid-body equilibrium problems using
Chapter Objectives To develop the equations of equilibrium for a rigid body. To introduce the concept of the free-body diagram for a rigid body. To show how to solve rigid-body equilibrium problems using
General Physics I. Lecture 9: Vector Cross Product. Prof. WAN, Xin ( 万歆 )
") General Physics I Lecture 9: Vector Cross Product Prof. WAN, Xin ( 万歆 ) xinwan@zju.edu.cn http://zimp.zju.edu.cn/~xinwan/ Outline Examples of the rotation of a rigid object about a fixed axis Force/torque
General Physics I Lecture 9: Vector Cross Product Prof. WAN, Xin ( 万歆 ) xinwan@zju.edu.cn http://zimp.zju.edu.cn/~xinwan/ Outline Examples of the rotation of a rigid object about a fixed axis Force/torque
Theory of structure I 2006/2013. Chapter one DETERMINACY & INDETERMINACY OF STRUCTURES
 Chapter one DETERMINACY & INDETERMINACY OF STRUCTURES Introduction A structure refers to a system of connected parts used to support a load. Important examples related to civil engineering include buildings,
Chapter one DETERMINACY & INDETERMINACY OF STRUCTURES Introduction A structure refers to a system of connected parts used to support a load. Important examples related to civil engineering include buildings,
Questions from all units
 Questions from all units S.NO 1. 1 UNT NO QUESTON Explain the concept of force and its characteristics. BLOOMS LEVEL LEVEL 2. 2 Explain different types of force systems with examples. Determine the magnitude
Questions from all units S.NO 1. 1 UNT NO QUESTON Explain the concept of force and its characteristics. BLOOMS LEVEL LEVEL 2. 2 Explain different types of force systems with examples. Determine the magnitude
Vectors. Introduction
 Chapter 3 Vectors Vectors Vector quantities Physical quantities that have both numerical and directional properties Mathematical operations of vectors in this chapter Addition Subtraction Introduction
Chapter 3 Vectors Vectors Vector quantities Physical quantities that have both numerical and directional properties Mathematical operations of vectors in this chapter Addition Subtraction Introduction
Chap. 10: Rotational Motion
 Chap. 10: Rotational Motion I. Rotational Kinematics II. Rotational Dynamics - Newton s Law for Rotation III. Angular Momentum Conservation (Chap. 10) 1 Newton s Laws for Rotation n e t I 3 rd part [N
Chap. 10: Rotational Motion I. Rotational Kinematics II. Rotational Dynamics - Newton s Law for Rotation III. Angular Momentum Conservation (Chap. 10) 1 Newton s Laws for Rotation n e t I 3 rd part [N
where G is called the universal gravitational constant.
 UNIT-I BASICS & STATICS OF PARTICLES 1. What are the different laws of mechanics? First law: A body does not change its state of motion unless acted upon by a force or Every object in a state of uniform
UNIT-I BASICS & STATICS OF PARTICLES 1. What are the different laws of mechanics? First law: A body does not change its state of motion unless acted upon by a force or Every object in a state of uniform
FRAMES AND MACHINES Learning Objectives 1). To evaluate the unknown reactions at the supports and the interaction forces at the connection points of a
. To evaluate the unknown reactions at the supports and the interaction forces at the connection points of a") FRAMES AND MACHINES Learning Objectives 1). To evaluate the unknown reactions at the supports and the interaction forces at the connection points of a rigid frame in equilibrium by solving the equations
FRAMES AND MACHINES Learning Objectives 1). To evaluate the unknown reactions at the supports and the interaction forces at the connection points of a rigid frame in equilibrium by solving the equations
Course Overview. Statics (Freshman Fall) Dynamics: x(t)= f(f(t)) displacement as a function of time and applied force
 Dynamics: x(t)= f(f(t)) displacement as a function of time and applied force") Course Overview Statics (Freshman Fall) Engineering Mechanics Dynamics (Freshman Spring) Strength of Materials (Sophomore Fall) Mechanism Kinematics and Dynamics (Sophomore Spring ) Aircraft structures
Course Overview Statics (Freshman Fall) Engineering Mechanics Dynamics (Freshman Spring) Strength of Materials (Sophomore Fall) Mechanism Kinematics and Dynamics (Sophomore Spring ) Aircraft structures
Module 12: Work and the Scalar Product
 Module 1: Work and the Scalar Product 1.1 Scalar Product (Dot Product) We shall introduce a vector operation, called the dot product or scalar product that takes any two vectors and generates a scalar
Module 1: Work and the Scalar Product 1.1 Scalar Product (Dot Product) We shall introduce a vector operation, called the dot product or scalar product that takes any two vectors and generates a scalar
Chapter 7: Internal Forces
 Chapter 7: Internal Forces Chapter Objectives To show how to use the method of sections for determining the internal loadings in a member. To generalize this procedure by formulating equations that can
Chapter 7: Internal Forces Chapter Objectives To show how to use the method of sections for determining the internal loadings in a member. To generalize this procedure by formulating equations that can
P 3. Figure 8.39 Constrained pulley system. , y 2. and y 3. . Introduce a coordinate function y P
 Example 8.9 ulleys and Ropes Constraint Conditions Consider the arrangement of pulleys and blocks shown in Figure 8.9. The pulleys are assumed massless and frictionless and the connecting strings are massless
Example 8.9 ulleys and Ropes Constraint Conditions Consider the arrangement of pulleys and blocks shown in Figure 8.9. The pulleys are assumed massless and frictionless and the connecting strings are massless
OUT ON A LIMB AND HUNG OUT TO DRY :
 27-Nov-12 17:03 1 of 2 h p://edugen.wileyplus.com/edugen/courses/crs1404/pc/c10/c2hlchbhcmq3mjewyzewxzeuegzvcm0.enc?course=crs1404&id=ref CHAPTER 10 OUT ON A LIMB AND HUNG OUT TO DRY : A LOOK AT INTERNAL
27-Nov-12 17:03 1 of 2 h p://edugen.wileyplus.com/edugen/courses/crs1404/pc/c10/c2hlchbhcmq3mjewyzewxzeuegzvcm0.enc?course=crs1404&id=ref CHAPTER 10 OUT ON A LIMB AND HUNG OUT TO DRY : A LOOK AT INTERNAL
Phy 211: General Physics I. Chapter 3: Vectors Lecture Notes
 Phy 211: General Physics I Chapter 3: Vectors Lecture Notes Vectors & Scalars Most physical quantities can categorized as one of 2 types (tensors notwithstanding): 1. Scalar Quantities: described by a
Phy 211: General Physics I Chapter 3: Vectors Lecture Notes Vectors & Scalars Most physical quantities can categorized as one of 2 types (tensors notwithstanding): 1. Scalar Quantities: described by a
Engineering Mechanics Department of Mechanical Engineering Dr. G. Saravana Kumar Indian Institute of Technology, Guwahati
 Engineering Mechanics Department of Mechanical Engineering Dr. G. Saravana Kumar Indian Institute of Technology, Guwahati Module 3 Lecture 6 Internal Forces Today, we will see analysis of structures part
Engineering Mechanics Department of Mechanical Engineering Dr. G. Saravana Kumar Indian Institute of Technology, Guwahati Module 3 Lecture 6 Internal Forces Today, we will see analysis of structures part
Pin-Jointed Frame Structures (Frameworks)
") Pin-Jointed rame Structures (rameworks) 1 Pin Jointed rame Structures (rameworks) A pin-jointed frame is a structure constructed from a number of straight members connected together at their ends by frictionless
Pin-Jointed rame Structures (rameworks) 1 Pin Jointed rame Structures (rameworks) A pin-jointed frame is a structure constructed from a number of straight members connected together at their ends by frictionless
CHAPTER 2: EQUILIBRIUM OF RIGID BODIES
 For a rigid body to be in equilibrium, the net force as well as the net moment about any arbitrary point O must be zero Summation of all external forces. Equilibrium: Sum of moments of all external forces.
For a rigid body to be in equilibrium, the net force as well as the net moment about any arbitrary point O must be zero Summation of all external forces. Equilibrium: Sum of moments of all external forces.
3.1 CONDITIONS FOR RIGID-BODY EQUILIBRIUM
 3.1 CONDITIONS FOR RIGID-BODY EQUILIBRIUM Consider rigid body fixed in the x, y and z reference and is either at rest or moves with reference at constant velocity Two types of forces that act on it, the
3.1 CONDITIONS FOR RIGID-BODY EQUILIBRIUM Consider rigid body fixed in the x, y and z reference and is either at rest or moves with reference at constant velocity Two types of forces that act on it, the
MEE224: Engineering Mechanics Lecture 4
 Lecture 4: Structural Analysis Part 1: Trusses So far we have only analysed forces and moments on a single rigid body, i.e. bars. Remember that a structure is a formed by and this lecture will investigate
Lecture 4: Structural Analysis Part 1: Trusses So far we have only analysed forces and moments on a single rigid body, i.e. bars. Remember that a structure is a formed by and this lecture will investigate
EQUATIONS OF EQUILIBRIUM & TWO- AND THREE-FORCE MEMEBERS
 EQUATIONS OF EQUILIBRIUM & TWO- AND THREE-FORCE MEMEBERS Today s Objectives: Students will be able to: a) Apply equations of equilibrium to solve for unknowns, and, b) Recognize two-force members. In-Class
EQUATIONS OF EQUILIBRIUM & TWO- AND THREE-FORCE MEMEBERS Today s Objectives: Students will be able to: a) Apply equations of equilibrium to solve for unknowns, and, b) Recognize two-force members. In-Class
I B.TECH EXAMINATIONS, JUNE ENGINEERING MECHANICS (COMMON TO CE, ME, CHEM, MCT, MMT, AE, AME, MIE, MIM)
") Code.No: 09A1BS05 R09 SET-1 I B.TECH EXAMINATIONS, JUNE - 2011 ENGINEERING MECHANICS (COMMON TO CE, ME, CHEM, MCT, MMT, AE, AME, MIE, MIM) Time: 3 hours Max. Marks: 75 Answer any FIVE questions All questions
Code.No: 09A1BS05 R09 SET-1 I B.TECH EXAMINATIONS, JUNE - 2011 ENGINEERING MECHANICS (COMMON TO CE, ME, CHEM, MCT, MMT, AE, AME, MIE, MIM) Time: 3 hours Max. Marks: 75 Answer any FIVE questions All questions
PEMP-AML2506. Day 01B. Session Speaker Dr. M. D. Deshpande. M.S. Ramaiah School of Advanced Studies - Bangalore 1 01B
 AML2506 Biomechanics and Flow Simulation Day Review of fengineering i Mechanics Session Speaker Dr. M. D. Deshpande 1 Session Objectives At the end of this session the delegate would have understood Basic
AML2506 Biomechanics and Flow Simulation Day Review of fengineering i Mechanics Session Speaker Dr. M. D. Deshpande 1 Session Objectives At the end of this session the delegate would have understood Basic
Figure 17.1 The center of mass of a thrown rigid rod follows a parabolic trajectory while the rod rotates about the center of mass.
 17.1 Introduction A body is called a rigid body if the distance between any two points in the body does not change in time. Rigid bodies, unlike point masses, can have forces applied at different points
17.1 Introduction A body is called a rigid body if the distance between any two points in the body does not change in time. Rigid bodies, unlike point masses, can have forces applied at different points
PLANAR KINETIC EQUATIONS OF MOTION (Section 17.2)
") PLANAR KINETIC EQUATIONS OF MOTION (Section 17.2) We will limit our study of planar kinetics to rigid bodies that are symmetric with respect to a fixed reference plane. As discussed in Chapter 16, when
PLANAR KINETIC EQUATIONS OF MOTION (Section 17.2) We will limit our study of planar kinetics to rigid bodies that are symmetric with respect to a fixed reference plane. As discussed in Chapter 16, when
= M. L 2. T 3. = = cm 3
 Phys101 First Major-1 Zero Version Sunday, March 03, 013 Page: 1 Q1. Work is defined as the scalar product of force and displacement. Power is defined as the rate of change of work with time. The dimension
Phys101 First Major-1 Zero Version Sunday, March 03, 013 Page: 1 Q1. Work is defined as the scalar product of force and displacement. Power is defined as the rate of change of work with time. The dimension
Plane Trusses Trusses
 TRUSSES Plane Trusses Trusses- It is a system of uniform bars or members (of various circular section, angle section, channel section etc.) joined together at their ends by riveting or welding and constructed
TRUSSES Plane Trusses Trusses- It is a system of uniform bars or members (of various circular section, angle section, channel section etc.) joined together at their ends by riveting or welding and constructed
Module 4 : Deflection of Structures Lecture 4 : Strain Energy Method
 Module 4 : Deflection of Structures Lecture 4 : Strain Energy Method Objectives In this course you will learn the following Deflection by strain energy method. Evaluation of strain energy in member under
Module 4 : Deflection of Structures Lecture 4 : Strain Energy Method Objectives In this course you will learn the following Deflection by strain energy method. Evaluation of strain energy in member under
is acting on a body of mass m = 3.0 kg and changes its velocity from an initial
 PHYS 101 second major Exam Term 102 (Zero Version) Q1. A 15.0-kg block is pulled over a rough, horizontal surface by a constant force of 70.0 N acting at an angle of 20.0 above the horizontal. The block
PHYS 101 second major Exam Term 102 (Zero Version) Q1. A 15.0-kg block is pulled over a rough, horizontal surface by a constant force of 70.0 N acting at an angle of 20.0 above the horizontal. The block
Chapter 12 Static Equilibrium
 Chapter Static Equilibrium. Analysis Model: Rigid Body in Equilibrium. More on the Center of Gravity. Examples of Rigid Objects in Static Equilibrium CHAPTER : STATIC EQUILIBRIUM AND ELASTICITY.) The Conditions
Chapter Static Equilibrium. Analysis Model: Rigid Body in Equilibrium. More on the Center of Gravity. Examples of Rigid Objects in Static Equilibrium CHAPTER : STATIC EQUILIBRIUM AND ELASTICITY.) The Conditions
FORCE TABLE INTRODUCTION
 FORCE TABLE INTRODUCTION All measurable quantities can be classified as either a scalar 1 or a vector 2. A scalar has only magnitude while a vector has both magnitude and direction. Examples of scalar
FORCE TABLE INTRODUCTION All measurable quantities can be classified as either a scalar 1 or a vector 2. A scalar has only magnitude while a vector has both magnitude and direction. Examples of scalar
1. Replace the given system of forces acting on a body as shown in figure 1 by a single force and couple acting at the point A.
 Code No: Z0321 / R07 Set No. 1 I B.Tech - Regular Examinations, June 2009 CLASSICAL MECHANICS ( Common to Mechanical Engineering, Chemical Engineering, Mechatronics, Production Engineering and Automobile
Code No: Z0321 / R07 Set No. 1 I B.Tech - Regular Examinations, June 2009 CLASSICAL MECHANICS ( Common to Mechanical Engineering, Chemical Engineering, Mechatronics, Production Engineering and Automobile
Chapter 5: Equilibrium of a Rigid Body
 Chapter 5: Equilibrium of a Rigid Body Chapter Objectives To develop the equations of equilibrium for a rigid body. To introduce the concept of a free-body diagram for a rigid body. To show how to solve
Chapter 5: Equilibrium of a Rigid Body Chapter Objectives To develop the equations of equilibrium for a rigid body. To introduce the concept of a free-body diagram for a rigid body. To show how to solve
FALL TERM EXAM, PHYS 1211, INTRODUCTORY PHYSICS I Saturday, 14 December 2013, 1PM to 4 PM, AT 1003
 FALL TERM EXAM, PHYS 1211, INTRODUCTORY PHYSICS I Saturday, 14 December 2013, 1PM to 4 PM, AT 1003 NAME: STUDENT ID: INSTRUCTION 1. This exam booklet has 14 pages. Make sure none are missing 2. There is
FALL TERM EXAM, PHYS 1211, INTRODUCTORY PHYSICS I Saturday, 14 December 2013, 1PM to 4 PM, AT 1003 NAME: STUDENT ID: INSTRUCTION 1. This exam booklet has 14 pages. Make sure none are missing 2. There is