Course Overview. Statics (Freshman Fall) Dynamics: x(t)= f(f(t)) displacement as a function of time and applied force
|
|
|
- Baldwin Lynch
- 6 years ago
- Views:
Transcription
1 Course Overview Statics (Freshman Fall) Engineering Mechanics Dynamics (Freshman Spring) Strength of Materials (Sophomore Fall) Mechanism Kinematics and Dynamics (Sophomore Spring ) Aircraft structures (Sophomore Spring and Junior Fall) Vibration(Senior) Statics: F 0 force distribution on a system Dynamics: x(t)= f(f(t)) displacement as a function of time and applied force Strength of Materials: δ = f(f) deflection of deformable bodies subject to static applied force Vibration: x(t) = f(f(t)) displacement on particles and rigid bodies as a function of time and frequency 1
2 Engineering Mechanics: Statics Chapter 1 General Principles Chapter Objectives Basic quantities and idealizations of mechanics Newton s Laws of Motion and Gravitation Principles for applying the SI system of units General guide for solving problems Chapter Outline Mechanics Fundamental Concepts Units of Measurement The International System of Units Numerical Calculations General Procedure for Analysis 2
3 1.1 Mechanics Mechanics can be divided into 3 branches: - Rigid-body Mechanics - Deformable-body Mechanics - Fluid Mechanics Rigid-body Mechanics deals with - Statics Equilibrium of bodies, at rest, and Moving with constant velocity - Dynamics Accelerated motion of bodies 3


4 1.2 Fundamentals Concepts Basic Quantities Length - locate the position of a point in space Mass - measure of a quantity of matter Time - succession of events Force - a push or pull exerted by one body on another Idealizations Particles - has a mass and size can be neglected Rigid Body - a combination of a large number of particles Concentrated Force - the effect of a loading 4

5 1.2 Newton s Laws of Motion First Law - A particle originally at rest, or moving in a straight line with constant velocity, will remain in this state provided that the particle is not subjected to an unbalanced force. Second Law - A particle acted upon by an unbalanced force F experiences an acceleration a that has the same direction as the force and a magnitude that is directly proportional to the force. Third Law - The mutual forces of action and reaction between two particles are equal and, opposite and collinear. F ma 5
6 Chapter 2 Force Vector Chapter Outline Scalars and Vectors Vector Operations Vector Addition of Forces Addition of a System of Coplanar Forces Cartesian Vectors Addition and Subtraction of Cartesian Vectors Position Vectors Force Vector Directed along a Line Dot Product 6
7 2.1 Scalar and Vector Scalar A quantity characterized by a positive or negative number, Indicated by letters in italic such as A, e.g. Mass, volume and length Vector A quantity that has magnitude and direction, e.g. Position, force and moment, presented as A and its magnitude (positive quantity) as A Vector Subtraction R = A B = A + ( - B ) Finding a Resultant Force Parallelogram law is carried out to find the resultant force F R = ( F 1 + F 2 ) 7
8 2.4 Addition of a System of Coplanar Forces Scalar Notation Components of forces expressed as algebraic scalars F x F cos and F y F sin Cartesian Vector Notation Cartesian unit vectors i and j are used to designate the x and y directions with unit vectors i and j F Fi F j x y Coplanar Force Resultants F F i F j 1 1x 1y F F i F j 2 2x 2 y F F i F j 3 3x 3 y Coplanar Force Resultants Scalar notation F F F F F F i j R Rx Ry F F Rx Ry F F 1x 1y F F 2x 2 y F F 3x 3y 8
i + (600sin30ºN + 400cos45ºN)j = {236.8i + 582.")
9 Example 2.6 The link is subjected to two forces F 1 and F 2. Determine the magnitude and orientation of the resultant force. Cartesian Vector Notation F 1 = { 600cos30 i + 600sin30 j } N F 2 = { -400sin45 i + 400cos45 j } N Thus, F R = F 1 + F 2 = (600cos30ºN - 400sin45ºN)i + (600sin30ºN + 400cos45ºN)j = {236.8i j}N The magnitude and direction of F R are determined in the same manner as before. 9

10 2.5 Cartesian Vectors Right-Handed Coordinate System A rectangular or Cartesian coordinate system is said to be right-handed provided: Rectangular Components of a Vector A vector A may have one, two or three rectangular components along the x, y and z axes, depending on orientation By two successive application of the parallelogram law A = A + A z A = A x + A y Combing the equations, A can be expressed as A = A x + A y + A z A A ua 10
11 2.5 Direction Cosines of a Cartesian Vector Orientation of A is defined as the coordinate direction angles α, β and γ measured between A and the positive x, y and z axes, 0 α, β and γ 180 The direction cosines of A is A x cos A A y cos A A z cos A ua A / A ( Ax / A ) i + ( Ay / A) j + ( Az / A) k ua cosi + cos j + cos k cos + cos + cos = 1 A A u A A cosi + A cos j + A cos k Ax i + Ay j + Az k 11
12 Example 2.8 Express the force F as Cartesian vector. Solution : Since two angles are specified, the third angle is found by cos cos cos 1 cos 2 cos cos o cos 45 2 ( 0. 5 ) ( ) 2 o 1 2 ± 0. 5 o cos 1 o ( ) or cos By inspection, β= 60º since F x is in the +x direction Given F = 200N F F cos i+ Fcos jf cos k =(200cos60 N) +(200cos60 N) +(200cos45 N) ={100.0i j k}n Checking: i j k F F 2 x F 2 y F 2 z N 12
")
13 2.7 Position Vectors: Displacement and Force Position Displacement Vector r = xi + yj + zk F can be formulated as a Cartesian vector F = F u = F ( r / r ) 13


14 Example 2.13 The man pulls on the cord with a force of 350N. Represent this force acting on the support A, as a Cartesian vector and determine its direction. Solution: r m 2m 6m 7m 14
15 2.9 Dot Product Laws of Operation 1. Commutative law A B = B A or A T B=B T A 2. Multiplication by a scalar a(a B) = (aa) B = A (ab) = (A B)a 3. Distribution law A (B + D) = (A B) + (A D) Cartesian Vector Formulation - Dot product of Cartesian unit vectors i i = 1 j j = 1 k k = 1 i j = 0 i k = 1 j k = 1 Applications - The angle formed between two vectors cos ( AB / ( A B )) The components of a vector parallel and perpendicular to a line Aa A cos Au 15
(0.286) (300)(0.857) (0)(0.429) 257.")
16 Example 2.17 The frame is subjected to a horizontal force F = {300j} N. Determine the components of this force parallel and perpendicular to the member AB. Since u B Thus B B 2i 6 j 3k i j 0.429k F AB r r j i j k Fu B (0)(0.286) (300)(0.857) (0)(0.429) 257.1N F cos 16
 { 73.")
17 Solution Since result is a positive scalar, F AB has the same sense of direction as u B. F F u AB AB AB 257.1N 0.286i j 0.429k {73.5i 220 j 110 k} N Perpendicular component F F F 300 j (73.5i 220 j 110 k) { 73.5i 80 j 110 k} N AB Magnitude can be determined from F or from Pythagorean Theorem F F FAB 300N 257.1N 155N 17
18 Chapter 3 Equilibrium of a Particle Chapter Objectives Concept of the free-body diagram for a particle Solve particle equilibrium problems using the equations of equilibrium Chapter Outline Condition for the Equilibrium of a Particle The Free-Body Diagram Coplanar Systems Three-Dimensional Force Systems 18
19 3.1 Equilibrium and the Free-Body Diagram Best representation of all the unknown forces ( F) which acts on a body A sketch showing the particle free from the surroundings with all the forces acting on it 19
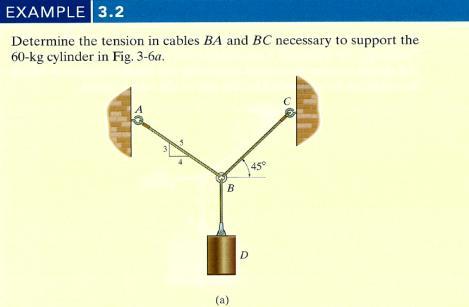
20 3.2 The Free-Body Diagram Spring Linear elastic spring: with spring constant or stiffness k. F = ks Cables and Pulley Cables (or cords) are assumed negligible weight and cannot stretch Tension always acts in the direction of the cable Tension force must have a constant magnitude for equilibrium For any angle, the cable is subjected to a constant tension T Procedure for Drawing a FBD 1. Draw outlined shape 2. Show all the forces Active forces: particle in motion and Reactive forces: constraints that prevent motion 3. Identify each forces 20

 = 58.9N and the force on cord CE.")

21 Example 3.1 The sphere has a mass of 6kg and is supported. Draw a free-body diagram of the sphere, the cord CE and the knot at C. FBD at Sphere Two forces acting, weight 6kg (9.81m/s 2 ) = 58.9N and the force on cord CE. Cord CE Two forces acting: sphere and knot For equilibrium, F CE = F EC FBD at Knot 3 forces acting: cord CBA, cord CE and spring CD 21


22 22
23 3.4 Three-Dimensional Systems For particle equilibrium F = 0 Resolving into i, j, k components F x i + F y j + F z k = 0 Procedure for Analysis Free-body Diagram -Establish the x, y, z axes -Label all known and unknown force Equations of Equilibrium - Apply F x = 0, F y = 0 and F z = 0 - Negative results indicate that the sense of the force is opposite to that shown in the FBD. 23
 = -0.318F B i 0.424F B j + 0.848F B k F C = F C (r C / r C ) = -0.318F C i 0.424F C j + 0.")
24 Example 3.7 Determine the force developed in each cable used to support the 40kN crate. FBD at Point A To expose all three unknown forces in the cables. Equations of Equilibrium Expressing each forces in Cartesian vectors, F B = F B (r B / r B ) = F B i 0.424F B j F B k F C = F C (r C / r C ) = F C i 0.424F C j F C k F D = F D i and W = -40k 24
25 Solution For equilibrium, F = 0; F B + F C + F D + W = F B i 0.424F B j F B k 0.318F C i 0.424F C j F C k + F D i - 40k = 0 F x = 0; 0.318F B 0.318F C + F D = 0 F y = 0; 0.424F B 0.424F C = 0 F z = 0; 0.848F B F C 40 = 0 Solving, F B = F C = 23.6kN F D = 15.0kN 25
26 Chapter 4 Force System Resultants Chapter Objectives Concept of moment of a force in two and three dimensions Method for finding the moment of a force about a specified axis. Define the moment of a couple. Determine the resultants of non-concurrent force systems Reduce a simple distributed loading to a resultant force having a specified location Chapter Outline Moment of a Force Scalar Formation Cross Product Moment of Force Vector Formulation Principle of Moments Moment of a Force about a Specified Axis Moment of a Couple Simplification of a Force and Couple System Further Simplification of a Force and Couple System Reduction of a Simple Distributed Loading 26

 z Magnitude For magnitude of M O, M O = Fd")

27 4.1 Moment of a Force Scalar Formation Moment of a force about a point or axis a measure of the tendency of the force to cause a body to rotate about the point or axis Torque tendency of rotation caused by F x or simple moment (M o ) z Magnitude For magnitude of M O, M O = Fd (Nm) where d = perpendicular distance from O to its line of action of force Direction Direction using right hand rule Resultant Moment M Ro = Fd 27
u C Laws of Operations 1.")
 = (aa) x B = A x (ab) = ( A x B")

28 4.2 Cross Product Cross product of two vectors A and B yields C, which is written as C = A x B = (AB sinθ)u C Laws of Operations 1. Commutative law is not valid A x B B x A Rather, A x B = - B x A 2. Multiplication by a Scalar a( A x B ) = (aa) x B = A x (ab) = ( A x B )a 3. Distributive Law A x ( B + D ) = ( A x B ) + ( A x D ) Proper order of the cross product must be maintained since they are not commutative 28


29 4.2 Cross Product Cartesian Vector Formulation Use C = AB sinθ on a pair of Cartesian unit vectors A more compact determinant in the form as AB i j k A A A x y z B B B x y z Moment of force F about point O can be expressed using cross product M O = r x F For magnitude of cross product, M O = rf sinθ Treat r as a sliding vector. Since d = r sinθ, M O = rf sinθ = F (rsinθ) = Fd 29

 j ( rx Fy ry Fx ) k 0 rz ry Fx rz 0 r x F y ry")
30 4.3 Moment of Force - Vector Formulation For force expressed in Cartesian form, i j k MO r F rx ry r z F x Fy Fz with the determinant expended, M0 ( ry Fz rz Fy ) i ( rx Fz rz Fx ) j ( rx Fy ry Fx ) k 0 rz ry Fx rz 0 r x F y ry rx 0 Fz 30


31 r r AB AB rab or = r AB



32 Example 4.4 Two forces act on the rod. Determine the resultant moment they create about the flange at O. Express the result as a Cartesian vector. r A 5 j m rb 4i 5 j 2 k m The resultant moment about O is M r F r F r F O A B i j k i j k i 40 j 60 k kn m 32
 = r x F 1 + r x F 2 4.")

33 4.4 Principles of Moments Since F = F 1 + F 2, M O = r x F = r x (F 1 + F 2 ) = r x F 1 + r x F Moment of a Force about a Specified Axis Vector Analysis For magnitude of M A, M A = M O cosθ = M O u a where u a = unit vector In determinant form, M u ( r F) u u u ax ay az r r r a ax x y z F F F x y z 33

34 Example 4.8 Determine the moment produced by the force F which tends to rotate the rod about the AB axis rc 0, 0 F M r F rb 0.2, B 0.2 u T M AB ub M

35 r CD F r Solution: OC r r CD CD T M roc F T MOA roa M roa


36 4.6 Moment of a Couple Couple two parallel forces of the same magnitude but opposite direction separated by perpendicular distance d Resultant force = 0 Scalar Formulation Magnitude of couple moment M = Fd M acts perpendicular to plane containing the forces Vector Formulation For couple moment, M = r x F Equivalent Couples 2 couples are equivalent if they produce the same moment Forces of equal couples lie on the same plane or plane parallel to one another 36

 X (-250k) + (0.66cos30ºi + 0.8j 0.6sin30ºk) x (250k) = {-130j}N.")
 x (250k) = {-130j}N.")
37 Example 4.12 Determine the couple moment acting on the pipe. Segment AB is directed 30 below the x y plane. Take moment about point O, M = r A x (-250k) + r B x (250k) = (0.8j) X (-250k) + (0.66cos30ºi + 0.8j 0.6sin30ºk) x (250k) = {-130j}N.cm Take moment about point A M = r AB x (250k) = (0.6cos30 i 0.6sin30 k) x (250k) = {-130j}N.cm Take moment about point A or B, M = Fd = 250N(0.5196m) = 129.9N.cm M acts in the j direction M = {-130j}N.cm 37

38 4.7 Simplification of a Force and Couple System Equivalent resultant force acting at point O and a resultant couple moment is expressed as If force system lies in the x y plane and couple moments are perpendicular to this plane, R R O O F F M M M R x x R y y R O O F F F F M M M 38


39 4.8 Simplification of a Force and Couple System Concurrent Force System A concurrent force system is where lines of action of all the forces intersect at a common point O FR F Coplanar Force System Lines of action of all the forces lie in the same plane Resultant force of this system also lies in this plane 39



40 4.8 Simplification of a Force and Couple System Consists of forces that are all parallel to the z axis 40

41 4.9 Distributed Loading Large surface area of a body may be subjected to distributed loadings, often defined as pressure measured in Pascal (Pa): 1 Pa = 1N/m 2 Magnitude of Resultant Force Magnitude of df is determined from differential area da under the loading curve. For length L, F wxdx da A Location of Resultant Force R L df produces a moment of xdf = x w(x) dx about O xf R xw( x) dx L Solving for x A x L L xw( x) dx w( x) dx 41


42 Example 4.21 Determine the magnitude and location of the equivalent resultant force acting on the shaft. Solution For the colored differential area element, 2 da wdx 60x dx For resultant force F R F; 2 2 FR da 60x dx A x N For location of line of action, x x 2 0 x(60 x ) dx A 0 0 A xda da 1.5m 42
Engineering Mechanics: Statics in SI Units, 12e
 Engineering Mechanics: Statics in SI Units, 12e 3 Equilibrium of a Particle 1 Chapter Objectives Concept of the free-body diagram for a particle Solve particle equilibrium problems using the equations
Engineering Mechanics: Statics in SI Units, 12e 3 Equilibrium of a Particle 1 Chapter Objectives Concept of the free-body diagram for a particle Solve particle equilibrium problems using the equations
Engineering Mechanics: Statics in SI Units, 12e Force Vectors
 Engineering Mechanics: Statics in SI Units, 1e orce Vectors 1 Chapter Objectives Parallelogram Law Cartesian vector form Dot product and angle between vectors Chapter Outline 1. Scalars and Vectors. Vector
Engineering Mechanics: Statics in SI Units, 1e orce Vectors 1 Chapter Objectives Parallelogram Law Cartesian vector form Dot product and angle between vectors Chapter Outline 1. Scalars and Vectors. Vector
Chapter Objectives. Copyright 2011 Pearson Education South Asia Pte Ltd
 Chapter Objectives To show how to add forces and resolve them into components using the Parallelogram Law. To express force and position in Cartesian vector form and explain how to determine the vector
Chapter Objectives To show how to add forces and resolve them into components using the Parallelogram Law. To express force and position in Cartesian vector form and explain how to determine the vector
Engineering Mechanics: Statics in SI Units, 12e
 Engineering Mechanics: Statics in SI Units, 12e 3 Equilibrium of a Particle Chapter Objectives To introduce the concept of the free-body diagram for a particle To show how to solve particle equilibrium
Engineering Mechanics: Statics in SI Units, 12e 3 Equilibrium of a Particle Chapter Objectives To introduce the concept of the free-body diagram for a particle To show how to solve particle equilibrium
ARC241 Structural Analysis I Lecture 5, Sections ST4.5 ST4.10
 Lecture 5, Sections ST4.5 ST4.10 ST4.5) Moment of a Force about a Specified Axis ST4.6) Moment of a Couple ST4.7) Equivalent System ST4.8) Resultant of a Force and a Couple System ST4.9) Further Reduction
Lecture 5, Sections ST4.5 ST4.10 ST4.5) Moment of a Force about a Specified Axis ST4.6) Moment of a Couple ST4.7) Equivalent System ST4.8) Resultant of a Force and a Couple System ST4.9) Further Reduction
2.1 Scalars and Vectors
 2.1 Scalars and Vectors Scalar A quantity characterized by a positive or negative number Indicated by letters in italic such as A e.g. Mass, volume and length 2.1 Scalars and Vectors Vector A quantity
2.1 Scalars and Vectors Scalar A quantity characterized by a positive or negative number Indicated by letters in italic such as A e.g. Mass, volume and length 2.1 Scalars and Vectors Vector A quantity
ENGINEERING MECHANICS BAA1113
 ENGINEERING MECHANICS BAA1113 Chapter 3: Equilibrium of a Particle (Static) by Pn Rokiah Bt Othman Faculty of Civil Engineering & Earth Resources rokiah@ump.edu.my Chapter Description Aims To explain the
ENGINEERING MECHANICS BAA1113 Chapter 3: Equilibrium of a Particle (Static) by Pn Rokiah Bt Othman Faculty of Civil Engineering & Earth Resources rokiah@ump.edu.my Chapter Description Aims To explain the
Ishik University / Sulaimani Civil Engineering Department. Chapter -2-
 Ishik University / Sulaimani Civil Engineering Department Chapter -- 1 orce Vectors Contents : 1. Scalars and Vectors. Vector Operations 3. Vector Addition of orces 4. Addition of a System of Coplanar
Ishik University / Sulaimani Civil Engineering Department Chapter -- 1 orce Vectors Contents : 1. Scalars and Vectors. Vector Operations 3. Vector Addition of orces 4. Addition of a System of Coplanar
Determine the angle θ between the two position vectors.
 -100. Determine the angle θ between the two position vectors. -105. A force of 80 N is applied to the handle of the wrench. Determine the magnitudes of the components of the force acting along the axis
-100. Determine the angle θ between the two position vectors. -105. A force of 80 N is applied to the handle of the wrench. Determine the magnitudes of the components of the force acting along the axis
Engineering Mechanics: Statics in SI Units, 12e
 Engineering Mechanics: Statics in SI Units, 12e 2 Force Vectors 1 Chapter Objectives Parallelogram Law Cartesian vector form Dot product and an angle between two vectors 2 Chapter Outline 1. Scalars and
Engineering Mechanics: Statics in SI Units, 12e 2 Force Vectors 1 Chapter Objectives Parallelogram Law Cartesian vector form Dot product and an angle between two vectors 2 Chapter Outline 1. Scalars and
Engineering Mechanics Statics
 Mechanical Systems Engineering_2016 Engineering Mechanics Statics 6. Moment of a Couple Dr. Rami Zakaria Moment of a Couple We need a moment (or torque) of (12 N m) to rotate the wheel. Notice that one
Mechanical Systems Engineering_2016 Engineering Mechanics Statics 6. Moment of a Couple Dr. Rami Zakaria Moment of a Couple We need a moment (or torque) of (12 N m) to rotate the wheel. Notice that one
STATICS. FE Review. Statics, Fourteenth Edition R.C. Hibbeler. Copyright 2016 by Pearson Education, Inc. All rights reserved.
 STATICS FE Review 1. Resultants of force systems VECTOR OPERATIONS (Section 2.2) Scalar Multiplication and Division VECTOR ADDITION USING EITHER THE PARALLELOGRAM LAW OR TRIANGLE Parallelogram Law: Triangle
STATICS FE Review 1. Resultants of force systems VECTOR OPERATIONS (Section 2.2) Scalar Multiplication and Division VECTOR ADDITION USING EITHER THE PARALLELOGRAM LAW OR TRIANGLE Parallelogram Law: Triangle
Equilibrium of a Particle
 ME 108 - Statics Equilibrium of a Particle Chapter 3 Applications For a spool of given weight, what are the forces in cables AB and AC? Applications For a given weight of the lights, what are the forces
ME 108 - Statics Equilibrium of a Particle Chapter 3 Applications For a spool of given weight, what are the forces in cables AB and AC? Applications For a given weight of the lights, what are the forces
Engineering Mechanics: Statics in SI Units, 12e
 Engineering Mechanics: Statics in SI Units, 12e 5 Equilibrium of a Rigid Body Chapter Objectives Develop the equations of equilibrium for a rigid body Concept of the free-body diagram for a rigid body
Engineering Mechanics: Statics in SI Units, 12e 5 Equilibrium of a Rigid Body Chapter Objectives Develop the equations of equilibrium for a rigid body Concept of the free-body diagram for a rigid body
Chapter 2: Force Vectors
 Chapter 2: Force Vectors Chapter Objectives To show how to add forces and resolve them into components using the Parallelogram Law. To express force and position in Cartesian vector form and explain how
Chapter 2: Force Vectors Chapter Objectives To show how to add forces and resolve them into components using the Parallelogram Law. To express force and position in Cartesian vector form and explain how
Ishik University / Sulaimani Architecture Department Structure ARCH 214 Chapter -4- Force System Resultant
 Ishik University / Sulaimani Architecture Department 1 Structure ARCH 214 Chapter -4- Force System Resultant 2 1 CHAPTER OBJECTIVES To discuss the concept of the moment of a force and show how to calculate
Ishik University / Sulaimani Architecture Department 1 Structure ARCH 214 Chapter -4- Force System Resultant 2 1 CHAPTER OBJECTIVES To discuss the concept of the moment of a force and show how to calculate
Chapter Objectives. Copyright 2011 Pearson Education South Asia Pte Ltd
 Chapter Objectives To develop the equations of equilibrium for a rigid body. To introduce the concept of the free-body diagram for a rigid body. To show how to solve rigid-body equilibrium problems using
Chapter Objectives To develop the equations of equilibrium for a rigid body. To introduce the concept of the free-body diagram for a rigid body. To show how to solve rigid-body equilibrium problems using
MECHANICS. Prepared by Engr. John Paul Timola
 MECHANICS Prepared by Engr. John Paul Timola MECHANICS a branch of the physical sciences that is concerned with the state of rest or motion of bodies that are subjected to the action of forces. subdivided
MECHANICS Prepared by Engr. John Paul Timola MECHANICS a branch of the physical sciences that is concerned with the state of rest or motion of bodies that are subjected to the action of forces. subdivided
Chap. 4 Force System Resultants
 Chap. 4 Force System Resultants Chapter Outline Moment of a Force Scalar Formation Cross Product Moment of Force Vector Formulation Principle of Moments Moment of a Force about a Specified xis Moment of
Chap. 4 Force System Resultants Chapter Outline Moment of a Force Scalar Formation Cross Product Moment of Force Vector Formulation Principle of Moments Moment of a Force about a Specified xis Moment of
CIV100: Mechanics. Lecture Notes. Module 1: Force & Moment in 2D. You Know What to Do!
 CIV100: Mechanics Lecture Notes Module 1: Force & Moment in 2D By: Tamer El-Diraby, PhD, PEng. Associate Prof. & Director, I2C University of Toronto Acknowledgment: Hesham Osman, PhD and Jinyue Zhang,
CIV100: Mechanics Lecture Notes Module 1: Force & Moment in 2D By: Tamer El-Diraby, PhD, PEng. Associate Prof. & Director, I2C University of Toronto Acknowledgment: Hesham Osman, PhD and Jinyue Zhang,
ME 230 Kinematics and Dynamics
 ME 230 Kinematics and Dynamics Wei-Chih Wang Department of Mechanical Engineering University of Washington Lecture 6: Particle Kinetics Kinetics of a particle (Chapter 13) - 13.4-13.6 Chapter 13: Objectives
ME 230 Kinematics and Dynamics Wei-Chih Wang Department of Mechanical Engineering University of Washington Lecture 6: Particle Kinetics Kinetics of a particle (Chapter 13) - 13.4-13.6 Chapter 13: Objectives
Mechanics: Scalars and Vectors
 Mechanics: Scalars and Vectors Scalar Onl magnitude is associated with it Vector e.g., time, volume, densit, speed, energ, mass etc. Possess direction as well as magnitude Parallelogram law of addition
Mechanics: Scalars and Vectors Scalar Onl magnitude is associated with it Vector e.g., time, volume, densit, speed, energ, mass etc. Possess direction as well as magnitude Parallelogram law of addition
Chapter 2 Statics of Particles. Resultant of Two Forces 8/28/2014. The effects of forces on particles:
 Chapter 2 Statics of Particles The effects of forces on particles: - replacing multiple forces acting on a particle with a single equivalent or resultant force, - relations between forces acting on a particle
Chapter 2 Statics of Particles The effects of forces on particles: - replacing multiple forces acting on a particle with a single equivalent or resultant force, - relations between forces acting on a particle
EQUATIONS OF MOTION: RECTANGULAR COORDINATES
 EQUATIONS OF MOTION: RECTANGULAR COORDINATES Today s Objectives: Students will be able to: 1. Apply Newton s second law to determine forces and accelerations for particles in rectilinear motion. In-Class
EQUATIONS OF MOTION: RECTANGULAR COORDINATES Today s Objectives: Students will be able to: 1. Apply Newton s second law to determine forces and accelerations for particles in rectilinear motion. In-Class
Chapter -4- Force System Resultant
 Ishik University / Sulaimani Civil Engineering Department Chapter -4- Force System Resultant 1 2 1 CHAPTER OBJECTIVES To discuss the concept of the moment of a force and show how to calculate it in two
Ishik University / Sulaimani Civil Engineering Department Chapter -4- Force System Resultant 1 2 1 CHAPTER OBJECTIVES To discuss the concept of the moment of a force and show how to calculate it in two
Statics deal with the condition of equilibrium of bodies acted upon by forces.
 Mechanics It is defined as that branch of science, which describes and predicts the conditions of rest or motion of bodies under the action of forces. Engineering mechanics applies the principle of mechanics
Mechanics It is defined as that branch of science, which describes and predicts the conditions of rest or motion of bodies under the action of forces. Engineering mechanics applies the principle of mechanics
Mechanics of Materials
 Mechanics of Materials 2. Introduction Dr. Rami Zakaria References: 1. Engineering Mechanics: Statics, R.C. Hibbeler, 12 th ed, Pearson 2. Mechanics of Materials: R.C. Hibbeler, 9 th ed, Pearson 3. Mechanics
Mechanics of Materials 2. Introduction Dr. Rami Zakaria References: 1. Engineering Mechanics: Statics, R.C. Hibbeler, 12 th ed, Pearson 2. Mechanics of Materials: R.C. Hibbeler, 9 th ed, Pearson 3. Mechanics
Chapter - 1. Equilibrium of a Rigid Body
 Chapter - 1 Equilibrium of a Rigid Body Dr. Rajesh Sathiyamoorthy Department of Civil Engineering, IIT Kanpur hsrajesh@iitk.ac.in; http://home.iitk.ac.in/~hsrajesh/ Condition for Rigid-Body Equilibrium
Chapter - 1 Equilibrium of a Rigid Body Dr. Rajesh Sathiyamoorthy Department of Civil Engineering, IIT Kanpur hsrajesh@iitk.ac.in; http://home.iitk.ac.in/~hsrajesh/ Condition for Rigid-Body Equilibrium
Engineering Mechanics. Electrical Engineering. First stage
 Assist AliA. A Engineering Mechanics Electrical Engineering First stage Syllabus Static 1- General Princples 2- System of Forces 3- Composition and Resolution of Foreces Moments 5- Equilibrium 6- Trusses
Assist AliA. A Engineering Mechanics Electrical Engineering First stage Syllabus Static 1- General Princples 2- System of Forces 3- Composition and Resolution of Foreces Moments 5- Equilibrium 6- Trusses
Chap. 3 Rigid Bodies: Equivalent Systems of Forces. External/Internal Forces; Equivalent Forces
 Chap. 3 Rigid Bodies: Equivalent Systems of Forces Treatment of a body as a single particle is not always possible. In general, the size of the body and the specific points of application of the forces
Chap. 3 Rigid Bodies: Equivalent Systems of Forces Treatment of a body as a single particle is not always possible. In general, the size of the body and the specific points of application of the forces
Tenth Edition STATICS 1 Ferdinand P. Beer E. Russell Johnston, Jr. David F. Mazurek Lecture Notes: John Chen California Polytechnic State University
 T E CHAPTER 1 VECTOR MECHANICS FOR ENGINEERS: STATICS Ferdinand P. Beer E. Russell Johnston, Jr. David F. Mazurek Lecture Notes: Introduction John Chen California Polytechnic State University! Contents
T E CHAPTER 1 VECTOR MECHANICS FOR ENGINEERS: STATICS Ferdinand P. Beer E. Russell Johnston, Jr. David F. Mazurek Lecture Notes: Introduction John Chen California Polytechnic State University! Contents
Name. MECH 223 Engineering Statics. Midterm 1, February 24 th 2015
 1 Name MECH 223 Engineering Statics Midterm 1, February 24 th 2015 Question 1 (20 + 5 points) (a) (5 points) Form the vector products B C and B C (where B = B ) and use the result to prove the identity
1 Name MECH 223 Engineering Statics Midterm 1, February 24 th 2015 Question 1 (20 + 5 points) (a) (5 points) Form the vector products B C and B C (where B = B ) and use the result to prove the identity
STATICS. Bodies. Vector Mechanics for Engineers: Statics VECTOR MECHANICS FOR ENGINEERS: Design of a support
 4 Equilibrium CHAPTER VECTOR MECHANICS FOR ENGINEERS: STATICS Ferdinand P. Beer E. Russell Johnston, Jr. Lecture Notes: J. Walt Oler Texas Tech University of Rigid Bodies 2010 The McGraw-Hill Companies,
4 Equilibrium CHAPTER VECTOR MECHANICS FOR ENGINEERS: STATICS Ferdinand P. Beer E. Russell Johnston, Jr. Lecture Notes: J. Walt Oler Texas Tech University of Rigid Bodies 2010 The McGraw-Hill Companies,
Equilibrium of a Rigid Body. Engineering Mechanics: Statics
 Equilibrium of a Rigid Body Engineering Mechanics: Statics Chapter Objectives Revising equations of equilibrium of a rigid body in 2D and 3D for the general case. To introduce the concept of the free-body
Equilibrium of a Rigid Body Engineering Mechanics: Statics Chapter Objectives Revising equations of equilibrium of a rigid body in 2D and 3D for the general case. To introduce the concept of the free-body
LOVELY PROFESSIONAL UNIVERSITY BASIC ENGINEERING MECHANICS MCQ TUTORIAL SHEET OF MEC Concurrent forces are those forces whose lines of action
 LOVELY PROFESSIONAL UNIVERSITY BASIC ENGINEERING MECHANICS MCQ TUTORIAL SHEET OF MEC 107 1. Concurrent forces are those forces whose lines of action 1. Meet on the same plane 2. Meet at one point 3. Lie
LOVELY PROFESSIONAL UNIVERSITY BASIC ENGINEERING MECHANICS MCQ TUTORIAL SHEET OF MEC 107 1. Concurrent forces are those forces whose lines of action 1. Meet on the same plane 2. Meet at one point 3. Lie
Announcements. Equilibrium of a Rigid Body
 Announcements Equilibrium of a Rigid Body Today s Objectives Identify support reactions Draw a free body diagram Class Activities Applications Support reactions Free body diagrams Examples Engr221 Chapter
Announcements Equilibrium of a Rigid Body Today s Objectives Identify support reactions Draw a free body diagram Class Activities Applications Support reactions Free body diagrams Examples Engr221 Chapter
Vector Mechanics: Statics
 PDHOnline Course G492 (4 PDH) Vector Mechanics: Statics Mark A. Strain, P.E. 2014 PDH Online PDH Center 5272 Meadow Estates Drive Fairfax, VA 22030-6658 Phone & Fax: 703-988-0088 www.pdhonline.org www.pdhcenter.com
PDHOnline Course G492 (4 PDH) Vector Mechanics: Statics Mark A. Strain, P.E. 2014 PDH Online PDH Center 5272 Meadow Estates Drive Fairfax, VA 22030-6658 Phone & Fax: 703-988-0088 www.pdhonline.org www.pdhcenter.com
F R. + F 3x. + F 2y. = (F 1x. j + F 3x. i + F 2y. i F 3y. i + F 1y. j F 2x. ) i + (F 1y. ) j. F 2x. F 3y. = (F ) i + (F ) j. ) j
 i + (F 1y. ) j. F 2x. F 3y. = (F ) i + (F ) j. ) j") General comments: closed book and notes but optional one page crib sheet allowed. STUDY: old exams, homework and power point lectures! Key: make sure you can solve your homework problems and exam problems.
General comments: closed book and notes but optional one page crib sheet allowed. STUDY: old exams, homework and power point lectures! Key: make sure you can solve your homework problems and exam problems.
NEWTON S LAWS OF MOTION (EQUATION OF MOTION) (Sections )
 (Sections )") NEWTON S LAWS OF MOTION (EQUATION OF MOTION) (Sections 13.1-13.3) Today s Objectives: Students will be able to: a) Write the equation of motion for an accelerating body. b) Draw the free-body and kinetic
NEWTON S LAWS OF MOTION (EQUATION OF MOTION) (Sections 13.1-13.3) Today s Objectives: Students will be able to: a) Write the equation of motion for an accelerating body. b) Draw the free-body and kinetic
Ishik University / Sulaimani Architecture Department. Structure. ARCH 214 Chapter -5- Equilibrium of a Rigid Body
 Ishik University / Sulaimani Architecture Department 1 Structure ARCH 214 Chapter -5- Equilibrium of a Rigid Body CHAPTER OBJECTIVES To develop the equations of equilibrium for a rigid body. To introduce
Ishik University / Sulaimani Architecture Department 1 Structure ARCH 214 Chapter -5- Equilibrium of a Rigid Body CHAPTER OBJECTIVES To develop the equations of equilibrium for a rigid body. To introduce
ENGR-1100 Introduction to Engineering Analysis. Lecture 13
 ENGR-1100 Introduction to Engineering Analysis Lecture 13 EQUILIBRIUM OF A RIGID BODY & FREE-BODY DIAGRAMS Today s Objectives: Students will be able to: a) Identify support reactions, and, b) Draw a free-body
ENGR-1100 Introduction to Engineering Analysis Lecture 13 EQUILIBRIUM OF A RIGID BODY & FREE-BODY DIAGRAMS Today s Objectives: Students will be able to: a) Identify support reactions, and, b) Draw a free-body
where x and y are any two non-parallel directions in the xy-plane. iii) One force equation and one moment equation.
 One force equation and one moment equation.") Concurrent Force System ( of Particles) Recall that the resultant of a concurrent force system is a force F R that passes through the point of concurrency, which we label as point O. The moment equation,
Concurrent Force System ( of Particles) Recall that the resultant of a concurrent force system is a force F R that passes through the point of concurrency, which we label as point O. The moment equation,
3.1 CONDITIONS FOR RIGID-BODY EQUILIBRIUM
 3.1 CONDITIONS FOR RIGID-BODY EQUILIBRIUM Consider rigid body fixed in the x, y and z reference and is either at rest or moves with reference at constant velocity Two types of forces that act on it, the
3.1 CONDITIONS FOR RIGID-BODY EQUILIBRIUM Consider rigid body fixed in the x, y and z reference and is either at rest or moves with reference at constant velocity Two types of forces that act on it, the
Announcements. Equilibrium of a Particle in 2-D
 nnouncements Equilibrium of a Particle in 2-D Today s Objectives Draw a free body diagram (FBD) pply equations of equilibrium to solve a 2-D problem Class ctivities pplications What, why, and how of a
nnouncements Equilibrium of a Particle in 2-D Today s Objectives Draw a free body diagram (FBD) pply equations of equilibrium to solve a 2-D problem Class ctivities pplications What, why, and how of a
Miscellaneous (dimension, angle, etc.) - black [pencil] Use different colors in diagrams. Body outline - blue [black] Vector
![Miscellaneous (dimension, angle, etc.) - black [pencil] Use different colors in diagrams. Body outline - blue [black] Vector](/thumbs/80/82415275.jpg "Miscellaneous (dimension, angle, etc.) - black [pencil] Use different colors in diagrams. Body outline - blue [black] Vector") 1. Sstems of orces & s 2142111 Statics, 2011/2 Department of Mechanical Engineering, Chulalongkorn Uniersit bjecties Students must be able to Course bjectie Analze a sstem of forces and moments Chapter
1. Sstems of orces & s 2142111 Statics, 2011/2 Department of Mechanical Engineering, Chulalongkorn Uniersit bjecties Students must be able to Course bjectie Analze a sstem of forces and moments Chapter
Chapter 8 Vectors and Scalars
 Chapter 8 193 Vectors and Scalars Chapter 8 Vectors and Scalars 8.1 Introduction: In this chapter we shall use the ideas of the plane to develop a new mathematical concept, vector. If you have studied
Chapter 8 193 Vectors and Scalars Chapter 8 Vectors and Scalars 8.1 Introduction: In this chapter we shall use the ideas of the plane to develop a new mathematical concept, vector. If you have studied
Moment of a force (scalar, vector ) Cross product Principle of Moments Couples Force and Couple Systems Simple Distributed Loading
 Cross product Principle of Moments Couples Force and Couple Systems Simple Distributed Loading") Chapter 4 Moment of a force (scalar, vector ) Cross product Principle of Moments Couples Force and Couple Systems Simple Distributed Loading The moment of a force about a point provides a measure of the
Chapter 4 Moment of a force (scalar, vector ) Cross product Principle of Moments Couples Force and Couple Systems Simple Distributed Loading The moment of a force about a point provides a measure of the
Physics 101 Lecture 5 Newton`s Laws
 Physics 101 Lecture 5 Newton`s Laws Dr. Ali ÖVGÜN EMU Physics Department The Laws of Motion q Newton s first law q Force q Mass q Newton s second law q Newton s third law qfrictional forces q Examples
Physics 101 Lecture 5 Newton`s Laws Dr. Ali ÖVGÜN EMU Physics Department The Laws of Motion q Newton s first law q Force q Mass q Newton s second law q Newton s third law qfrictional forces q Examples
Physics for Scientists and Engineers 4th Edition, 2017
 A Correlation of Physics for Scientists and Engineers 4th Edition, 2017 To the AP Physics C: Mechanics Course Descriptions AP is a trademark registered and/or owned by the College Board, which was not
A Correlation of Physics for Scientists and Engineers 4th Edition, 2017 To the AP Physics C: Mechanics Course Descriptions AP is a trademark registered and/or owned by the College Board, which was not
SKAA 1213 Engineering Mechanics
 SKAA 1213 Engineering Mechanics TPIC 5 Moment and Couple Lecturers: Rosli Anang Dr. Mohd Yunus Ishak Dr. Tan Cher Siang Moment of a Force Moment of a force about a point/axis the tendency of the force
SKAA 1213 Engineering Mechanics TPIC 5 Moment and Couple Lecturers: Rosli Anang Dr. Mohd Yunus Ishak Dr. Tan Cher Siang Moment of a Force Moment of a force about a point/axis the tendency of the force
CE 201 Statics. 2 Physical Sciences. Rigid-Body Deformable-Body Fluid Mechanics Mechanics Mechanics
 CE 201 Statics 2 Physical Sciences Branch of physical sciences 16 concerned with the state of Mechanics rest motion of bodies that are subjected to the action of forces Rigid-Body Deformable-Body Fluid
CE 201 Statics 2 Physical Sciences Branch of physical sciences 16 concerned with the state of Mechanics rest motion of bodies that are subjected to the action of forces Rigid-Body Deformable-Body Fluid
PHYS-2010: General Physics I Course Lecture Notes Section V
 PHYS-2010: General Physics I Course Lecture Notes Section V Dr. Donald G. Luttermoser East Tennessee State University Edition 2.5 Abstract These class notes are designed for use of the instructor and students
PHYS-2010: General Physics I Course Lecture Notes Section V Dr. Donald G. Luttermoser East Tennessee State University Edition 2.5 Abstract These class notes are designed for use of the instructor and students
Chapter 5. The Laws of Motion
 Chapter 5 The Laws of Motion The Laws of Motion The description of an object in motion included its position, velocity, and acceleration. There was no consideration of what might influence that motion.
Chapter 5 The Laws of Motion The Laws of Motion The description of an object in motion included its position, velocity, and acceleration. There was no consideration of what might influence that motion.
five moments ELEMENTS OF ARCHITECTURAL STRUCTURES: FORM, BEHAVIOR, AND DESIGN DR. ANNE NICHOLS SPRING 2014 lecture ARCH 614
 ELEMENTS OF ARCHITECTURAL STRUCTURES: FORM, BEHAVIOR, AND DESIGN DR. ANNE NICHOLS SPRING 2014 lecture five moments Moments 1 Moments forces have the tendency to make a body rotate about an axis http://www.physics.umd.edu
ELEMENTS OF ARCHITECTURAL STRUCTURES: FORM, BEHAVIOR, AND DESIGN DR. ANNE NICHOLS SPRING 2014 lecture five moments Moments 1 Moments forces have the tendency to make a body rotate about an axis http://www.physics.umd.edu
When a rigid body is in equilibrium, both the resultant force and the resultant couple must be zero.
 When a rigid body is in equilibrium, both the resultant force and the resultant couple must be zero. 0 0 0 0 k M j M i M M k R j R i R F R z y x z y x Forces and moments acting on a rigid body could be
When a rigid body is in equilibrium, both the resultant force and the resultant couple must be zero. 0 0 0 0 k M j M i M M k R j R i R F R z y x z y x Forces and moments acting on a rigid body could be
APPLIED MECHANICS I Resultant of Concurrent Forces Consider a body acted upon by co-planar forces as shown in Fig 1.1(a).
.") PPLIED MECHNICS I 1. Introduction to Mechanics Mechanics is a science that describes and predicts the conditions of rest or motion of bodies under the action of forces. It is divided into three parts 1.
PPLIED MECHNICS I 1. Introduction to Mechanics Mechanics is a science that describes and predicts the conditions of rest or motion of bodies under the action of forces. It is divided into three parts 1.
What is a Force? Free-Body diagrams. Contact vs. At-a-Distance 11/28/2016. Forces and Newton s Laws of Motion
 Forces and Newton s Laws of Motion What is a Force? In generic terms: a force is a push or a pull exerted on an object that could cause one of the following to occur: A linear acceleration of the object
Forces and Newton s Laws of Motion What is a Force? In generic terms: a force is a push or a pull exerted on an object that could cause one of the following to occur: A linear acceleration of the object
Engineering Mechanics Prof. U. S. Dixit Department of Mechanical Engineering Indian Institute of Technology, Guwahati
 Engineering Mechanics Prof. U. S. Dixit Department of Mechanical Engineering Indian Institute of Technology, Guwahati Module No. - 01 Basics of Statics Lecture No. - 01 Fundamental of Engineering Mechanics
Engineering Mechanics Prof. U. S. Dixit Department of Mechanical Engineering Indian Institute of Technology, Guwahati Module No. - 01 Basics of Statics Lecture No. - 01 Fundamental of Engineering Mechanics
Chapter 4. Forces and Newton s Laws of Motion. continued
 Chapter 4 Forces and Newton s Laws of Motion continued 4.9 Static and Kinetic Frictional Forces When an object is in contact with a surface forces can act on the objects. The component of this force acting
Chapter 4 Forces and Newton s Laws of Motion continued 4.9 Static and Kinetic Frictional Forces When an object is in contact with a surface forces can act on the objects. The component of this force acting
CHAPTER 2: EQUILIBRIUM OF RIGID BODIES
 For a rigid body to be in equilibrium, the net force as well as the net moment about any arbitrary point O must be zero Summation of all external forces. Equilibrium: Sum of moments of all external forces.
For a rigid body to be in equilibrium, the net force as well as the net moment about any arbitrary point O must be zero Summation of all external forces. Equilibrium: Sum of moments of all external forces.
Introduction to Engineering Mechanics
 Introduction to Engineering Mechanics Statics October 2009 () Introduction 10/09 1 / 19 Engineering mechanics Engineering mechanics is the physical science that deals with the behavior of bodies under
Introduction to Engineering Mechanics Statics October 2009 () Introduction 10/09 1 / 19 Engineering mechanics Engineering mechanics is the physical science that deals with the behavior of bodies under
The Concept of Force Newton s First Law and Inertial Frames Mass Newton s Second Law The Gravitational Force and Weight Newton s Third Law Analysis
 The Laws of Motion The Concept of Force Newton s First Law and Inertial Frames Mass Newton s Second Law The Gravitational Force and Weight Newton s Third Law Analysis Models using Newton s Second Law Forces
The Laws of Motion The Concept of Force Newton s First Law and Inertial Frames Mass Newton s Second Law The Gravitational Force and Weight Newton s Third Law Analysis Models using Newton s Second Law Forces
KINGS COLLEGE OF ENGINEERING ENGINEERING MECHANICS QUESTION BANK UNIT I - PART-A
 KINGS COLLEGE OF ENGINEERING ENGINEERING MECHANICS QUESTION BANK Sub. Code: CE1151 Sub. Name: Engg. Mechanics UNIT I - PART-A Sem / Year II / I 1.Distinguish the following system of forces with a suitable
KINGS COLLEGE OF ENGINEERING ENGINEERING MECHANICS QUESTION BANK Sub. Code: CE1151 Sub. Name: Engg. Mechanics UNIT I - PART-A Sem / Year II / I 1.Distinguish the following system of forces with a suitable
Engineering Mechanics: Statics
 Engineering Mechanics: Statics Chapter 2: Force Systems Part A: Two Dimensional Force Systems Force Force = an action of one body on another Vector quantity External and Internal forces Mechanics of Rigid
Engineering Mechanics: Statics Chapter 2: Force Systems Part A: Two Dimensional Force Systems Force Force = an action of one body on another Vector quantity External and Internal forces Mechanics of Rigid
MOMENT OF A FORCE ABOUT A POINT
 MOMENT OF A FORCE ABOUT A POINT The tendency of a body to rotate about an axis passing through a specific point O when acted upon by a force (sometimes called a torque). 1 APPLICATIONS A torque or moment
MOMENT OF A FORCE ABOUT A POINT The tendency of a body to rotate about an axis passing through a specific point O when acted upon by a force (sometimes called a torque). 1 APPLICATIONS A torque or moment
Chapter 5: Equilibrium of a Rigid Body
 Chapter 5: Equilibrium of a Rigid Body Chapter Objectives To develop the equations of equilibrium for a rigid body. To introduce the concept of a free-body diagram for a rigid body. To show how to solve
Chapter 5: Equilibrium of a Rigid Body Chapter Objectives To develop the equations of equilibrium for a rigid body. To introduce the concept of a free-body diagram for a rigid body. To show how to solve
Name: Lab Partner: Section: In this experiment vector addition, resolution of vectors into components, force, and equilibrium will be explored.
 Chapter 3 Vectors Name: Lab Partner: Section: 3.1 Purpose In this experiment vector addition, resolution of vectors into components, force, and equilibrium will be explored. 3.2 Introduction A vector is
Chapter 3 Vectors Name: Lab Partner: Section: 3.1 Purpose In this experiment vector addition, resolution of vectors into components, force, and equilibrium will be explored. 3.2 Introduction A vector is
Physics 111 Lecture 4 Newton`s Laws
 Physics 111 Lecture 4 Newton`s Laws Dr. Ali ÖVGÜN EMU Physics Department www.aovgun.com he Laws of Motion q Newton s first law q Force q Mass q Newton s second law q Newton s third law q Examples Isaac
Physics 111 Lecture 4 Newton`s Laws Dr. Ali ÖVGÜN EMU Physics Department www.aovgun.com he Laws of Motion q Newton s first law q Force q Mass q Newton s second law q Newton s third law q Examples Isaac
THE WORK OF A FORCE, THE PRINCIPLE OF WORK AND ENERGY & SYSTEMS OF PARTICLES
 THE WORK OF A FORCE, THE PRINCIPLE OF WORK AND ENERGY & SYSTEMS OF PARTICLES Today s Objectives: Students will be able to: 1. Calculate the work of a force. 2. Apply the principle of work and energy to
THE WORK OF A FORCE, THE PRINCIPLE OF WORK AND ENERGY & SYSTEMS OF PARTICLES Today s Objectives: Students will be able to: 1. Calculate the work of a force. 2. Apply the principle of work and energy to
LOVELY PROFESSIONAL UNIVERSITY BASIC ENGINEERING MECHANICS MCQ TUTORIAL SHEET OF MEC Concurrent forces are those forces whose lines of action
 LOVELY PROFESSIONAL UNIVERSITY BASIC ENGINEERING MECHANICS MCQ TUTORIAL SHEET OF MEC 107 1. Concurrent forces are those forces whose lines of action 1. Meet on the same plane 2. Meet at one point 3. Lie
LOVELY PROFESSIONAL UNIVERSITY BASIC ENGINEERING MECHANICS MCQ TUTORIAL SHEET OF MEC 107 1. Concurrent forces are those forces whose lines of action 1. Meet on the same plane 2. Meet at one point 3. Lie
Equilibrium. Rigid Bodies VECTOR MECHANICS FOR ENGINEERS: STATICS. Eighth Edition CHAPTER. Ferdinand P. Beer E. Russell Johnston, Jr.
 Eighth E 4 Equilibrium CHAPTER VECTOR MECHANICS FOR ENGINEERS: STATICS Ferdinand P. Beer E. Russell Johnston, Jr. Lecture Notes: J. Walt Oler Texas Tech University of Rigid Bodies Contents Introduction
Eighth E 4 Equilibrium CHAPTER VECTOR MECHANICS FOR ENGINEERS: STATICS Ferdinand P. Beer E. Russell Johnston, Jr. Lecture Notes: J. Walt Oler Texas Tech University of Rigid Bodies Contents Introduction
CHAPTER 1 INTRODUCTION
 CHAPTER 1 INTRODUCTION DEFINITION OF MECHANICS Mechanics may be defined as the physical science which describes and predicts the conditions of rest or motion of bodies under the action of force systems.
CHAPTER 1 INTRODUCTION DEFINITION OF MECHANICS Mechanics may be defined as the physical science which describes and predicts the conditions of rest or motion of bodies under the action of force systems.
3D Force Couple System and Resultant. Q.No.1: Replace the force system by an equivalent force and couple moment at point A.
 3D Force Couple System and Resultant Q.No.1: Replace the force system by an equivalent force and couple moment at point A. Q.No.2: Handle forces F1 and F2 are applied to the electric drill. Replace this
3D Force Couple System and Resultant Q.No.1: Replace the force system by an equivalent force and couple moment at point A. Q.No.2: Handle forces F1 and F2 are applied to the electric drill. Replace this
Static Equilibrium. University of Arizona J. H. Burge
 Static Equilibrium Static Equilibrium Definition: When forces acting on an object which is at rest are balanced, then the object is in a state of static equilibrium. - No translations - No rotations In
Static Equilibrium Static Equilibrium Definition: When forces acting on an object which is at rest are balanced, then the object is in a state of static equilibrium. - No translations - No rotations In
Figure Two. Then the two vector equations of equilibrium are equivalent to three scalar equations:
 2004- v 10/16 2. The resultant external torque (the vector sum of all external torques) acting on the body must be zero about any origin. These conditions can be written as equations: F = 0 = 0 where the
2004- v 10/16 2. The resultant external torque (the vector sum of all external torques) acting on the body must be zero about any origin. These conditions can be written as equations: F = 0 = 0 where the
Lecture 0. Statics. Module 1. Overview of Mechanics Analysis. IDeALab. Prof. Y.Y.KIM. Solid Mechanics
 Lecture 0. Statics Module 1. Overview of Mechanics Analysis Overview of Mechanics Analysis Procedure of Solving Mechanics Problems Objective : Estimate the force required in the flexor muscle Crandall,
Lecture 0. Statics Module 1. Overview of Mechanics Analysis Overview of Mechanics Analysis Procedure of Solving Mechanics Problems Objective : Estimate the force required in the flexor muscle Crandall,
Unit 5 Forces I- Newton s First & Second Law
 Unit 5 Forces I- Newton s First & Second Law Unit is the NEWTON(N) Is by definition a push or a pull Does force need a Physical contact? Can exist during physical contact(tension, Friction, Applied Force)
Unit 5 Forces I- Newton s First & Second Law Unit is the NEWTON(N) Is by definition a push or a pull Does force need a Physical contact? Can exist during physical contact(tension, Friction, Applied Force)
VALLIAMMAI ENGINEERING COLLEGE SRM NAGAR, KATTANKULATHUR DEPARTMENT OF MECHANICAL ENGINEERING
 VALLIAMMAI ENGINEERING COLLEGE SRM NAGAR, KATTANKULATHUR 603203 DEPARTMENT OF MECHANICAL ENGINEERING BRANCH: MECHANICAL YEAR / SEMESTER: I / II UNIT 1 PART- A 1. State Newton's three laws of motion? 2.
VALLIAMMAI ENGINEERING COLLEGE SRM NAGAR, KATTANKULATHUR 603203 DEPARTMENT OF MECHANICAL ENGINEERING BRANCH: MECHANICAL YEAR / SEMESTER: I / II UNIT 1 PART- A 1. State Newton's three laws of motion? 2.
Static Equilibrium; Torque
 Static Equilibrium; Torque The Conditions for Equilibrium An object with forces acting on it, but that is not moving, is said to be in equilibrium. The first condition for equilibrium is that the net force
Static Equilibrium; Torque The Conditions for Equilibrium An object with forces acting on it, but that is not moving, is said to be in equilibrium. The first condition for equilibrium is that the net force
2. Force Systems. 2.1 Introduction. 2.2 Force
 2. Force Systems 2.1 Introduction 2.2 Force - A force is an action of one body on another. - A force is an action which tends to cause acceleration of a body (in dynamics). - A force is a vector quantity.
2. Force Systems 2.1 Introduction 2.2 Force - A force is an action of one body on another. - A force is an action which tends to cause acceleration of a body (in dynamics). - A force is a vector quantity.
Statics Chapter II Fall 2018 Exercises Corresponding to Sections 2.1, 2.2, and 2.3
 Statics Chapter II Fall 2018 Exercises Corresponding to Sections 2.1, 2.2, and 2.3 2 3 Determine the magnitude of the resultant force FR = F1 + F2 and its direction, measured counterclockwise from the
Statics Chapter II Fall 2018 Exercises Corresponding to Sections 2.1, 2.2, and 2.3 2 3 Determine the magnitude of the resultant force FR = F1 + F2 and its direction, measured counterclockwise from the
STATICS. Equivalent Systems of Forces. Vector Mechanics for Engineers: Statics VECTOR MECHANICS FOR ENGINEERS: Contents & Objectives.
 3 Rigid CHATER VECTOR ECHANICS FOR ENGINEERS: STATICS Ferdinand. Beer E. Russell Johnston, Jr. Lecture Notes: J. Walt Oler Teas Tech Universit Bodies: Equivalent Sstems of Forces Contents & Objectives
3 Rigid CHATER VECTOR ECHANICS FOR ENGINEERS: STATICS Ferdinand. Beer E. Russell Johnston, Jr. Lecture Notes: J. Walt Oler Teas Tech Universit Bodies: Equivalent Sstems of Forces Contents & Objectives
ENGINEERING MECHANICS BAA1113. Chapter 4: Force System Resultants (Static)
") ENGINEERING MECHANICS BAA1113 Chapter 4: Force System Resultants (Static) by Pn Rokiah Bt Othman Faculty of Civil Engineering & Earth Resources rokiah@ump.edu.my Chapter Description Aims To explain the
ENGINEERING MECHANICS BAA1113 Chapter 4: Force System Resultants (Static) by Pn Rokiah Bt Othman Faculty of Civil Engineering & Earth Resources rokiah@ump.edu.my Chapter Description Aims To explain the
Dr. ANIL PATIL Associate Professor M.E.D., D.I.T., Dehradun
 by Dr. ANIL PATIL Associate Professor M.E.D., D.I.T., Dehradun 1 2 Mechanics The study of forces and their effect upon body under consideration Statics Deals with the forces which are acting on a body
by Dr. ANIL PATIL Associate Professor M.E.D., D.I.T., Dehradun 1 2 Mechanics The study of forces and their effect upon body under consideration Statics Deals with the forces which are acting on a body
Engineering Mechanics Statics
 Mechanical Systems Engineering- 2016 Engineering Mechanics Statics 2. Force Vectors; Operations on Vectors Dr. Rami Zakaria MECHANICS, UNITS, NUMERICAL CALCULATIONS & GENERAL PROCEDURE FOR ANALYSIS Today
Mechanical Systems Engineering- 2016 Engineering Mechanics Statics 2. Force Vectors; Operations on Vectors Dr. Rami Zakaria MECHANICS, UNITS, NUMERICAL CALCULATIONS & GENERAL PROCEDURE FOR ANALYSIS Today
Chapter 6: Structural Analysis
 Chapter 6: Structural Analysis Chapter Objectives To show how to determine the forces in the members of a truss using the method of joints and the method of sections. To analyze the forces acting on the
Chapter 6: Structural Analysis Chapter Objectives To show how to determine the forces in the members of a truss using the method of joints and the method of sections. To analyze the forces acting on the
EQUILIBRIUM OF A RIGID BODY
 EQUILIBRIUM OF A RIGID BODY Today s Objectives: Students will be able to a) Identify support reactions, and, b) Draw a free diagram. APPLICATIONS A 200 kg platform is suspended off an oil rig. How do we
EQUILIBRIUM OF A RIGID BODY Today s Objectives: Students will be able to a) Identify support reactions, and, b) Draw a free diagram. APPLICATIONS A 200 kg platform is suspended off an oil rig. How do we
The Laws of Motion. Newton s first law Force Mass Newton s second law Gravitational Force Newton s third law Examples
 The Laws of Motion Newton s first law Force Mass Newton s second law Gravitational Force Newton s third law Examples Gravitational Force Gravitational force is a vector Expressed by Newton s Law of Universal
The Laws of Motion Newton s first law Force Mass Newton s second law Gravitational Force Newton s third law Examples Gravitational Force Gravitational force is a vector Expressed by Newton s Law of Universal
Force System Resultants. Engineering Mechanics: Statics
 Force System Resultants Engineering Mechanics: Statics Chapter Objectives To discuss the concept of the moment of a force and show how to calculate it in 2-D and 3-D systems. Definition of the moment of
Force System Resultants Engineering Mechanics: Statics Chapter Objectives To discuss the concept of the moment of a force and show how to calculate it in 2-D and 3-D systems. Definition of the moment of
CEE 271: Applied Mechanics II, Dynamics Lecture 9: Ch.13, Sec.4-5
 1 / 40 CEE 271: Applied Mechanics II, Dynamics Lecture 9: Ch.13, Sec.4-5 Prof. Albert S. Kim Civil and Environmental Engineering, University of Hawaii at Manoa 2 / 40 EQUATIONS OF MOTION:RECTANGULAR COORDINATES
1 / 40 CEE 271: Applied Mechanics II, Dynamics Lecture 9: Ch.13, Sec.4-5 Prof. Albert S. Kim Civil and Environmental Engineering, University of Hawaii at Manoa 2 / 40 EQUATIONS OF MOTION:RECTANGULAR COORDINATES
STATICS. Rigid Bodies: Equivalent Systems of Forces VECTOR MECHANICS FOR ENGINEERS: Eighth Edition CHAPTER. Ferdinand P. Beer E. Russell Johnston, Jr.
 Eighth E CHAPTER VECTOR MECHANICS FOR ENGINEERS: STATICS Ferdinand P. Beer E. Russell Johnston, Jr. Lecture Notes: J. Walt Oler Texas Tech University Rigid Bodies: Equivalent Systems of Forces Contents
Eighth E CHAPTER VECTOR MECHANICS FOR ENGINEERS: STATICS Ferdinand P. Beer E. Russell Johnston, Jr. Lecture Notes: J. Walt Oler Texas Tech University Rigid Bodies: Equivalent Systems of Forces Contents
K.GNANASEKARAN. M.E.,M.B.A.,(Ph.D)
") DEPARTMENT OF MECHANICAL ENGG. Engineering Mechanics I YEAR 2th SEMESTER) Two Marks Question Bank UNIT-I Basics and statics of particles 1. Define Engineering Mechanics Engineering Mechanics is defined
DEPARTMENT OF MECHANICAL ENGG. Engineering Mechanics I YEAR 2th SEMESTER) Two Marks Question Bank UNIT-I Basics and statics of particles 1. Define Engineering Mechanics Engineering Mechanics is defined
ISBN :
 ISBN : 978-81-909042-4-7 - www.airwalkpublications.com ANNA UNIVERSITY - R2013 GE6253 ENGINEERING MECHANICS UNIT I: BASICS AND STATICS OF PARTICLES 12 Introduction Units and Dimensions Laws of Mechanics
ISBN : 978-81-909042-4-7 - www.airwalkpublications.com ANNA UNIVERSITY - R2013 GE6253 ENGINEERING MECHANICS UNIT I: BASICS AND STATICS OF PARTICLES 12 Introduction Units and Dimensions Laws of Mechanics
Table of Contents Lecture Topic Slides
 Mechanics 100 Table of Contents ecture Topic Slides 1 Fundamental Concepts 4 12 2 Force Vectors 14-20 3 Equilibrium Of Particles 22-26 4 Force Resultants 28-38 5 Equilibrium Of Rigid Bodies 40-52 6 Structural
Mechanics 100 Table of Contents ecture Topic Slides 1 Fundamental Concepts 4 12 2 Force Vectors 14-20 3 Equilibrium Of Particles 22-26 4 Force Resultants 28-38 5 Equilibrium Of Rigid Bodies 40-52 6 Structural
Engineering Mechanics I. Phongsaen PITAKWATCHARA
 2103-213 Engineering Mechanics I phongsaen@gmail.com December 6, 2007 Contents Preface iii 1 Introduction to Statics 1 1.0 Outline................................. 2 1.1 Basic Concepts............................
2103-213 Engineering Mechanics I phongsaen@gmail.com December 6, 2007 Contents Preface iii 1 Introduction to Statics 1 1.0 Outline................................. 2 1.1 Basic Concepts............................
EQUILIBRIUM OF A RIGID BODY & FREE-BODY DIAGRAMS
 Today s Objectives: Students will be able to: EQUILIBRIUM OF A RIGID BODY & FREE-BODY DIAGRAMS a) Identify support reactions, and, b) Draw a free-body diagram. In-Class Activities: Check Homework Reading
Today s Objectives: Students will be able to: EQUILIBRIUM OF A RIGID BODY & FREE-BODY DIAGRAMS a) Identify support reactions, and, b) Draw a free-body diagram. In-Class Activities: Check Homework Reading
The centroid of an area is defined as the point at which (12-2) The distance from the centroid of a given area to a specified axis may be found by
 The distance from the centroid of a given area to a specified axis may be found by") Unit 12 Centroids Page 12-1 The centroid of an area is defined as the point at which (12-2) The distance from the centroid of a given area to a specified axis may be found by (12-5) For the area shown
Unit 12 Centroids Page 12-1 The centroid of an area is defined as the point at which (12-2) The distance from the centroid of a given area to a specified axis may be found by (12-5) For the area shown
The case where there is no net effect of the forces acting on a rigid body
 The case where there is no net effect of the forces acting on a rigid body Outline: Introduction and Definition of Equilibrium Equilibrium in Two-Dimensions Special cases Equilibrium in Three-Dimensions
The case where there is no net effect of the forces acting on a rigid body Outline: Introduction and Definition of Equilibrium Equilibrium in Two-Dimensions Special cases Equilibrium in Three-Dimensions
ES226 (01) Engineering Mechanics: Statics Spring 2018 Lafayette College Engineering Division
 Engineering Mechanics: Statics Spring 2018 Lafayette College Engineering Division") ES226 (01) Engineering Mechanics: Statics Spring 2018 Lafayette College Engineering Division Exam 1 Study Guide Exam 1: Tuesday, February 6, 2018 7:30 to 8:30pm Kirby Room 104 Exam Format: 50 minute time
ES226 (01) Engineering Mechanics: Statics Spring 2018 Lafayette College Engineering Division Exam 1 Study Guide Exam 1: Tuesday, February 6, 2018 7:30 to 8:30pm Kirby Room 104 Exam Format: 50 minute time
ARC241 Structural Analysis I Lecture 1, Sections ST1.1 ST2.4
 Lecture 1, Sections ST1.1 ST2.4 ST1.1-ST1.2) Introduction ST1.3) Units of Measurements ST1.4) The International System (SI) of Units ST1.5) Numerical Calculations ST1.6) General Procedure of Analysis ST2.1)
Lecture 1, Sections ST1.1 ST2.4 ST1.1-ST1.2) Introduction ST1.3) Units of Measurements ST1.4) The International System (SI) of Units ST1.5) Numerical Calculations ST1.6) General Procedure of Analysis ST2.1)