A simple model for elastic and viscoelastic punch. indentation problems with experimental validation
|
|
|
- Edwin Boyd
- 5 years ago
- Views:
Transcription
1 A simple model for elastic and viscoelastic punch indentation problems with experimental validation A. SAMEUR, H. P. YIN, D. DUHAMEL, V. VILKE Université Paris-Est, Institut Navier, LAMI, Ecole Nationale des Ponts et Chaussées, 6 et 8 Avenue Blaise Pascal, Cité Descartes, Champs sur Marne, Marne La Vallée, FRANCE Moscow State University M.V. Lomonosov, Faculty of Mechanics and Mathematics, Main Building, MSU, Vorobjovy Gory, Moscow, 9899, RUSSIA Contact author: Duhamel Denis LAMI, ENPC-LCPC, Institut Navier Ecole Nationale des Ponts et Chaussées 6 et 8 Avenue Blaise Pascal, Cité Descartes, Champs sur Marne Marne La Vallée cedex, FRANCE Tel : Fax : duhamel@lami.enpc.fr
2 ABSTRACT This paper presents an analytical model of punctual elastic contact between a rigid body of arbitrary geometry and a plane surface. A simple analytical model is developed in order to evaluate the contact force knowing the volume of interpenetration, the surface and the perimeter of the base of this volume and the mechanical characteristics of surfaces in contact. Analytical and experimental validations are made for this model in the case of simple shapes (spherical, conical and pyramidal). Next, an approach for the resolution in case of contact between a rigid body and a viscoelastic plane is presented. The elastic constants are replaced by an integral operator corresponding to the viscoelastic stress-strain relation. At last, the viscoelastic punctual contact is studied analytically and validated experimentally. Keywords: contact, viscoelastic, analytical, experiment.
3 . Introduction The study of contact problems has its origins in the last quarter of the 9th century when Hertz [6] and Boussinesq [] presented solutions to the contact of linear elastic materials. Several solutions were derived from the solution of Boussinesq, an excellent account of which is given in Galin s book [4] and in Johnson [8]. Later, Sneddon [4] established a solution of the axisymmetric Boussinesq problem which enabled him to deduce simple formulas giving the penetration δ of a punch of arbitrary profile as well as the total force necessary to ensure this penetration. Then the interest of the viscoelastic contact problem emerged, Graham [5] gave an expression for the displacement stress field produced at any point of a linear homogeneous and isotropic viscoelastic half space by an arbitrary time dependent distribution of pressure acting on its boundary. The distribution of normal surface tractions prevailing when a rigid punch of arbitrary profile is pressed against the surface of a viscoelastic half space is determined in terms of a one parameter family of solutions to the corresponding elastic problem. One of the approaches for the resolution of a contact problem of a rigid sphere with a viscoelastic material was suggested by Radok []. It replaces elastic constants by an integral operator corresponding to the viscoelastic stress strain relation in which the radius of the contact area is a monotonically increasing function of time. Later, Hunter [7] studied the Hertz s problem in the case of the rebound of a rigid sphere on a viscoelastic half space so that the contact radius increases monotonically to a maximum and then decreases to zero. It was assumed that the distribution of pressure remains elliptic as in the elastic case. Ting [5] presented a method so that the problem of contact could be solved for an arbitrary contact radius. Numerical methods for the resolution of the contact were also developed. Webster & Sayle [7] and Chang & Gao [] developed a numerical model for the elastic contact of rough surfaces. Younguing & Linquing [8] proposed a numerical modelling for an elastic D
4 contact of rough surfaces. The authors conclude that the interaction of asperities has a great effect on the calculated results, particularly on the contact deformation. The finite element method was used by Kucharski et al [] who modelled the contact between a sphere and a rigid plane. They obtained a relation between the weight and the surface of contact. Kane et al [9] developed robust contact algorithms able to deal with complex contact situations involving several bodies with corners. However these numerical methods lead to time consuming computations. This paper presents a semi analytical model which uses a theory of the interaction potential between a rigid body and an elastic or viscoelatic solid. The aim is to get simple and very fast estimates for the contact force for given body shapes. The contact force can be expressed in terms of the volume of interpenetration, the surface and the perimeter of the base of this volume as well as the mechanical characteristics of surfaces in contact. Then, an approach for the resolution in the case of a rubber block with a viscoelastic behaviour is presented. Radok s approach [] is used; it replaces elastic constants by an integral operator corresponding to the viscoelastic stress-strain relation. Experimental validations are made for different shapes of simple rigid bodies (spherical, conical and pyramidal). Finally, a comparison of contact forces in the elastic and viscoelastic case is given.. Classical contact theory One of the first studies concerning the evaluation of the contact tensions between elastic solids was proposed by Hertz [6]. To express the normal force P versus the indentation, he made the assumptions that the sector of contact is elliptic, that each solid can be regarded as an elastic half space, that there is no friction between the two surfaces in contact and that the surfaces are continuous and no conform. These assumptions lead to the following well known relation 4
5 P = K δ () with 4 E * R K = () where P is the normal force applied, R is the equivalent radius of curvature and * E represents the Young s equivalent modulus. The theory of the Hertz s contact is limited to surfaces with smooth and continuous profiles with finite forces everywhere. The problem is different for a surface having edges or corners. The deformation must be sufficiently small in order to be in the field of the linear theory of elasticity. Consider a cone in contact with a plane surface, the area of contact is supposed to be small compared to the size of the two solids. The deformation is shown in Fig. which presents also the pressure distribution in the contact zone. If the smooth sides of the cone are prolonged beyond the contact surface, the pressures must equal zero at the edges. A classical approach to find the efforts in an elastic half space due to external tractions is given by Boussinesq [] and Cerruti [], who used the potential theory. Love [] applied the classical approach of the potential function to the cone and evaluated the contact pressure by the formula * p( s) = E cotα cosh ( a / s) () where s is the distance between the origin O and a point ranging between O and a. Thus the normal force is given by * The quantities α and a are defined in Fig.. P = π a E cotα (4) 5
6 . Contact between two bodies of complex shape.. Interaction potential theory Suppose that two bodies b and b are in contact at the point O. Oxy is the common tangent plane with axis OZ directed towards the body b (see Fig..a). The distance between the points M and M of the two bodies in the vicinity of the point O equals z z Ax + By (5) The points M and M have coordinates (x, y, z ) and (x, y, z ) and belong to the surfaces of the bodies. The values A and B are constant. In general we find an additional term Cxy in the last part of expression (5) but it can be eliminated by a suitable choice for the axes Ox and Oy. If the body b moves by a distance δ in the negative direction of axis Oz and if it is assumed that the bodies interpenetrate without deformation, there will be an intersecting domain Γ whose projection on the Oxy plan forms the surface (see Fig. b) σ = { x,y Ax + By δ} : (6) with the boundary {, y : Ax + By } σ = x = δ (7) The assumption that the bodies interpenetrate without deformation is an approximation. But this is not too far from reality and this will allow getting the simple expressions that follow. It will also be justified by comparison with the experimental results. Three characteristics of the intersecting domain will play an important role, namely, the volume V of Γ, the surface S and the perimeter p of σ V = ( δ Ax By ) dx dy = σ πδ AB (8) 6
7 πδ S = dx dy =, (9) σ AB 6δ p = A / E ( A/ B) () where E ( A/ ) is the elliptic integral of second species given by B π / / E ( A/ B) = ( ( A/ B)sin ϕ) dϕ () According to the traditional results of Hertz, in the case where the contact zone is an ellipse of surface ' x y σ = x,y : +, the force P and the coefficients of surfaces are linked by the a b following relations Love [] P( θ +θ ) A = I( k), I ( k) = a ( + z dz )( + k z ) P( θ +θ ) dz B = I ( k), I ( k) = b () ( + z )( + k z ) P( θ + θ ) δ = F ( k), F ( k) = F( k) = a π k dϕ sin ϕ b where k = <, a k k =, υi θ i =, i =,, F( k ) is the elliptic integral of first species, πe i E i and υ i are the Young s modulus and the Poisson's ratio of the body b i. A relation between A and B can be obtained from Eq. () A k I( k) = () B I ( k) It follows that the relation b / a = k <, which does not depend on the load P, is defined by the geometrical characteristics of surfaces in contact. The force P is given by (see Appendix A.) 7
8 P ( I ( k) I ( k)) δ / 4 / = (4) / 4 / / 4 ( θ + θ ) k ( F ( k)) ( AB) The potential U for the interaction of the bodies in contact, is calculated from the expression of virtual works by δu 4( I ( k) I ( k)) / 4 5 / = P δ U( δ ) = (5) / 4 / / 4 5( θ + θ ) k ( F ( k)) ( AB) δ Let us represent the relation (5) by the form U ) β γ ξ = f ( k V S p (6) where V, S and p are defined in the relations (8), (9) and (). By comparing the powers of δ ( + ξ ) and (AB) in the expressions (5) and (6) of U, we find β = and γ =. This leads to where ξ 4 f( k) f ( k) = (7) ( ) / 5π ξ ( θ + θ ) (+ ξ ) / 4 ( ξ ) / 4 I I f( k) = (8) ( ξ ) / 4 / ξ k F ( k) E ( A/ B) To study the function f ( ), let us express I ( ) and I ( ) by the elliptic integrals Finally we obtain I ( k) I k F ( k) E ( k) k k k = (9) k k) = ( E( k) k F ( )) () k ( k ( EF f( k) = ( ξ ) / k ) ( k ( E F (+ ξ ) / 4 / ξ ) F E k ( ) ( ξ ) / 4 A/ B) () The function f ( ) remains bounded if k tends towards, since according to Wittaker [6] k 8
9 π lim I ( k) = and k 4 π lim F ( k) = k () lim k A/ B = and π E () = () Then it follows lim f k ( k) ξ +.5 = ξ π + (4) The numerical analysis of the function () represented in Fig. shows us that the function f ( ) is nearly constant for ξ =. 5 with the average value. 6. Let us express the potential k U by the formula U / = 8 V p c 7 / 4 5 θ ) S (5) 4 π / ( θ + The parameter c is a constant which depends only on the geometry of contact surfaces. According to the preceding development c equals.6 for regular contact surfaces and for ξ =.5. It is supposed that the potential can be written in the same form (5) in the case of a contact of irregular surfaces. We will identify analytically and by experiments the constant c in order to validate this generalized formula in the case of bodies with arbitrary shapes... Validation in simple shape cases For this aim, three surface shapes are considered: the contact is between a plane surface and with spherical, conical and pyramidal rigid surfaces. For each case the relation between the force and the interpenetration will be determined. The constant c is then identified from experimental tests. To validate and generalize the expression of the potential (5) for any surface shape, let s take the example of a spherical form (see Fig. 4a). Once the expressions of the volume, the surface 9
10 and the perimeter are known, we can replace then in Eq. (5). The expressions of the volume, the surface and the perimeter of the part in contact are given by V π = δ (r 6 + δ ) S = π r (6) p = π r where r is the radius of the base of the volume in contact and δ is the interpenetration of the sphere in the plane surface. They are expressed as function of the angle α by the relations Suppose that α is very small thus The relation between r and δ is found by r = Rsinα and δ = R ( cosα ) (7) α r = Rα and δ = R (8) r = Rδ. It is assumed that r << R, thus δ << r. So the potential is summarized in the case of a plane contact/sphere by The force P then equals 4 U ( δ ) δ 5 P / * 5 / = cs π E R (9) U δ / * / = = cs π E R δ () The relation () expresses the force as function of the interpenetration in the case of a contact between a plane surface and a spherical surface. The constant c s can be determined by identification with the Hertz s law which leads to c = =. 6. π s / It would also be useful to know the expression of the force in case of a contact between a plane surface and a cone as well as in the case of a contact between a plane surface and a pyramid. An approximation of c for various surfaces in contact enables one to generalize the contact law (5).
11 The same method is used for a contact between a conical surface with angleα and a plane surface (see Fig. 4b). The expressions of the volume, the surface and the perimeter of contact are evaluated and replaced in the expression of the potential (5). The volume of the part in contact is evaluated by V = π δ r () The surface of the base in contact is S = π r, and the perimeter of the surface S is p r = π. The relation between r and δ is known to be tg α = r. So the potential equals δ U * / = cc E π tgα δ () The force P is written as P 8 45 / * = cc π E tgα δ () In order to find the relation between the interpenetration δ and the radius a, let us take the Boussinesq s equations for a point force on a half space. It follows that the relation of the interpenetration δ can be written under the form p ( υ) δ ( s) = (4) 4π G s where E G = is the shear modulus and υ is the Poisson's ratio. Knowing the pressure ( + υ) repartition () given by Love [], the interpenetrationδ which is the displacement at the apex of the cone, is written as a ( υ) δ = π s p ( s) ds (5) 4π G s It becomes
12 * π ( υ) E δ = a cotα (6) G So the relation (4) can be written in the form P 8 G π ( υ) = tgα δ. * (7) E If the assumption is made that the Young s modulus of the body () is very small in front of the Young s modulus of the body () E = E << E, we then obtain ( υ ) ( ) υ = (8) E * E E It follows that G ( υ) * = E, and the relation (6) becomes π * P = E tgα δ (9) 45 By comparison with relation () we find c c = / 4 π.. Application to a pyramid After considering the case of a contact between a plane surface with a sphere and a cone, it would be interesting to study the case of a contact between a plane surface and a pyramid (see Fig. 4c). The volume of the part in contact is evaluated by V = r δ (4) The surface of the base in contact is S = r and the perimeter of the surface S is p 4 r =. The relation between r and δ is r tgα =. So the potential equals δ U * / 4 = c p E π tgα δ (4) The force is thus written in the form
13 P U δ 6 45 * / 4 = = c p E π tgα δ (4) A model of the elastic contact between a plane surface and various surface shapes has been presented. The force P is expressed according to the interpenetrationδ, the geometrical and mechanical characteristics of the bodies in contact, and also by a constant c which was analytically identified for the spherical and conical case. The constants c s, cc and c p will also be identified experimentally and the expressions (), (9), (4) will so be validated. 4. Extension to materials with a viscoelastic behaviour Let us consider a pure shear stress, the stress strain relation expressed according to the shear modulus is s = G e. One of the approaches for the resolution of a contact problem between a rigid sphere and a viscoelastic material was suggested by Radok []. His approach replaces elastic constants by an integral operator corresponding to the viscoelastic stress strain relation t e( t') s( t) = ψ ( t t') dt' (4) t' Let us suppose that the variation of the force P according to the interpenetration δ in the case of elastic contact is written as γ P = G Qδ (44) where γ and Q depend on the form of the contact surface. By applying the Radok s method [], the expression of the force becomes P( t) = Q t d γ ψ ( t t ') δ ( t ') dt ' (45) dt ' By taking into account the parameters γ and Q defined in Table, the expression of the force is finally given by - for a contact between a rigid sphere and a viscoelastic plane
14 t 8 d / P( t) = R ψ ( t t ') δ ( t ') dt ' (46) dt ' - for a contact between a rigid cone and a viscoelastic plane t 4 d P( t) = tgα ψ ( t t ') δ ( t ') dt '. (47) π dt ' - for a contact between a rigid pyramid and a viscoelastic plane t 4 d P( t) = c p π / cotα ψ ( t t ') δ ( t ') dt ' (48) 45 dt ' 5. Experimental validation for elastic contacts In this purpose an experimental device is established. A compression Instron machine, bodies with various shapes (spherical, conical and pyramidal), LabView software for the acquisition of the results and a rubber block are used. Experimental relations between the force and the interpenetration are established for each body in contact with the rubber block. First the Young s modulus of the rubber block is identified by a relaxation test. Knowing the characteristics of the rubber block and the contact bodies, the coefficients c s, c c, c p corresponding to the contact models for the spherical, conical and pyramidal cases will be identified. 5.. Experimental identification of viscoelastic parameters A simple compression test on the rubber block presented in Fig. 5 is abruptly and quickly carried out by using a compression machine. A deformation of 8% is maintained constant and the evolution of the stress versus the time is recorded. It is noticed an abrupt and rapid increase of the stress to σ =.9 Mpa just after the load. This deformation is maintained by 4
15 blocking the crossbar for a long time until the stabilization of the stress which tends towards σ =.6 MPa. The stress versus the time is written under the form of a Prony s series σ t / τ t / τ n t / τ ( t) = ( An e + An e A e + E ) ε n (49) For the rubber block four characteristics times are found and the results are represented in table. After reconstitution of the relaxation curve from characteristics times and amplitudes, in Fig. 6, we notice that there is a good concordance of the two curves. Using less than four characteristic times doesn t allow a good reconstitution of the curve over the whole time range. The static Young s modulus of the block is found to be σ E = = 7. 5 MPa ε 5.. Experimental validation of the elastic contact model 5... Contact between a rubber block and a sphere The experimental device is the same as the one used for the relaxation test (see Fig. 7a). The load is carried out at a speed of. mm/s to simulate a static loading with the Young s modulus E = 7. 5 MPa. Fig. 8a represents the evolution of the force versus the interpenetration. By linear regression of the curve we obtained a line that has the following equation Ln ( P) =.5Ln( δ ) According to Eq. () and to the experimental results of the contact between the rubber block and the steel ball, it was found c s = / * 4. π E R e (5) Knowing the mechanical and geometrical characteristics of the two bodies in contact, the experimental value from the coefficient c s is deduced and equals.4. The theoretical value of the coefficient c s equals.6, which is slightly different from the experimental value. This result allows to validate the experiment by recovering the Hertz s result. 5
16 5... Contact between a rubber block and a cone The same test as the one used for the contact between the rubber block and the sphere is carried out. Two steel cones that have different angles ( α = 6 and α = 45 ) are used in order to study the influence of the angle on the distribution of the force. The experimental device is presented in Fig. 7b. The force versus the interpenetration for each cone in contact is given in Fig. 8b. By plotting the logarithmic curve of the force as function of the interpenetration and after having carried out a linear regression for each curves it is found for the cone with α = 6 that Ln ( P) =.99 Ln( δ ) and for the cone with α = 45 that Ln ( P) =. Ln( δ ) The evaluation of the force from the expression () adapted for the case of a contact between a plane surface and a cone is given by P U δ 8 45 / * = = cc π E tgα δ (5) The values of the coefficients are deducted and c =. 4 for an angle α = 6 and c =. 45 for an angle α = 45. The value of the coefficient cc does not differ much for different angles of the cone and from the analytical value which equals.45. c c 5... Contact between a rubber block and a pyramid The expression of the force versus the interpenetration is P U δ 6 45 * / 4 = = c p E π tgα δ (5) In order to identify the coefficient c p, the experimental device used for the identification of the coefficients cs and cc is taken again. The pyramid has an angle α = 68 (see Fig. 7c.). After having plotted the logarithmic curve (see Fig. 8c.) of the force variation versus the interpenetration, one obtains 6
17 Which leads to c =. 5. p 6 c p E = 45 * / π tgα e (5) The coefficients c s and c c were identified experimentally and analytically. c p was identified only experimentally since there is no analytical model for the pyramidal case. In Table the values obtained for various surfaces are presented. The differences between the experimental and the analytical results are quite small. Let s conclude that the value of the coefficient c s equals.6. For the conical case the value of the coefficient c c equals.45, which is true for any angle α. Considering the absence of a classical analytical theory for the pyramidal shape, we can however conclude that the contact law has the same shape as for the other cases with c p which equals Experimental validation for viscoelastic contacts The expression of the force according to the interpenetration is put in the form (46), (47) and (48). In the same way as for the case of an elastic contact, experimental tests are carried out in order to validate viscoelastic contact models. 6.. Contact between a rubber block and a steel ball In this test the same experimental device is used, except that instead of charging at a speed of, mm/s, the loading is done at a speed of 5 mm/s. The same rubber block and the same steel ball are used so the geometrical and mechanical characteristics are well known. The test does not last more than one second so only the characteristic time τ =,7 4 s is taken into account. From Eq. (49) one obtains 4 σ ( t) = ( A ε t / τ 4 e + E' ) (54) 7
18 with E ' = E + A + A + A. In order to solve Eq. (46), let s put δ ( t ') = V t '. The shear modulus for an incompressible material is E G =. It results that Eq. (46) gives 8 P t) = ( t t') / τ ( A e E' ) t d / R 4 + ( V t ' ) dt ' dt ' ( 4 (55) Which after integration leads to 8 P( t) = R V E' t + A τ t i π + τ 4 / / / / t / τ A e erf i t τ 4 (56) where erf is the error function given by erf ( i x) = i π x e y dy (57) In Fig. 9, we can see the evolution of the force P according to the interpenetration δ for the spherical, conical and pyramidal cases. The curves show that in all cases there is a good concordance between the two results. A comparison between the results obtained in the case of the elastic analytic model and in the case of the viscoelastic analytic model concludes that the value of the force in the case of a viscoelastic contact is higher by 4% than the value of the force in the case of an elastic contact. 7. Conclusion The theoretical model of the potential interaction for contacts between regular surfaces was presented and generalized for irregular surfaces. The validation of this model in the case of a contact between a plane surface with a sphere, a cone and a pyramid was made. Then an approach of the solution of a viscoelastic contact problem was seen, where the method of Radok [], which consists of replacing elastic constants by an integral operator, was applied. The viscoelastic behaviour of the material was modeled by a Prony s series. The Young s modulus and the characteristic times of a rubber block were identified. Once these 8
19 characteristics were identified, tests were carried out in which the rubber block was put into contact with various surfaces (spherical, conical and pyramidal). These tests made it possible to identify the coefficients c s, cc and c p.thus, we validated the models of elastic contact. Using the same method, tests of viscoelastic contact at a speed of 5 mm/s with the same rubber block and the various bodies were carried out. The results were compared to the results of a viscoelastic contact model. The results of the model and those of the experiments agree very well. A comparison between the results of the elastic contact model and the results of the viscoelastic contact model shows that for a given value of interpenetration δ, the viscoelastic force is 5% higher than the elastic force for this load speed. All these results validate the simple semi-analytical model developed in this paper for elastic and viscoelastic contacts of bodies with arbitrary shapes. Appendix A. Calculation of the force P The force P and the coefficients of surfaces σ and σ ' are linked by the following relations Love [] P( θ +θ ) dz A = I( k), I ( k) = a, (A.) ( + z )( + k z ) P( θ +θ ) dz B = I ( k), I ( k) = b, (A.) ( + z )( + k z ) π P( θ + θ ) dϕ δ = F ( k), F ( k) = F( k) = a, (A.) k sin ϕ b where k = <, a k k = and υi θ i =, i =,. πe i From Eqs. (A.) and (A.) we obtain 9
20 AB 9P ( θ + θ ) ( k) = (A.4) 4 a b I ( k) I Let us represent the relation (A.4) by the form ( AB) / 4 P ( θ + θ ) / / / 4 = (A.5) / 4 / k ( I a ( k) I ( k)) From Eq. (A.) it results a / P( θ + θ ) δ = F ( k ) / (A.6) It follows that the force relation is given by P ( I ( k) I ( k)) δ / 4 / = (A.7) / 4 / / 4 ( θ + θ ) k ( F ( k)) ( AB)
21 References [] Boussinesq J. Application des potentiels à l étude de l équilibre et du mouvement des solides élastiques. Paris, 885, Gauthier-Villars. [] Cerruti V. Acc. Licei, Mem. Fis. Mat, Roma, 88. [] Chang L, Gao Y. A simple numerical method for contact analysis of rough surfaces. Journal of Tribology 999; : [4] Galin LA. Contact problems in the theory of elasticity, 96. Translated by Mrs. Moss, H. North Carolina State College. [5] Graham GAC. The contact problem in the linear theory of viscoelasticity. International Journal of Engineering Science 965; : 7. [6] Hertz H. Über die Berührung fester elastischer Körper (On the contact of elastic solids). J. Reine und angewandte Mathematik 88; 9:56-7. [7] Hunter SC. The Hertz problem for a rigid spherical indenter and a viscoelastic halfspace. Journal of the Mechanics and Physics of Solids 96; 8:9-4. [8] Johnson KL. Contact mechanics, 985. Cambridge University Press. [9] Kane C, Repetto A, Ortiz M, Marsden JE. Finite element analysis of nonsmooth contact. Computer methods in applied mechanics and engineering 999; 8:-6. [] Kucharski S, Klimczak T, Polijaniuk A, Kaczmarek J. Finite elements model for the contact of rough surfaces 994; Wear 77:-. [] Love AEH. A treatise on the mathematical theory of elasticity, 97. Cambridge University Press. [] Love AEH. Boussinesq s problem for a rigid cone. Quarterly Journal of Mathematics (Oxford series) 99; :6. [] Radok JRM. Viscoelastic stress analysis. Q. App. Math 957; 5:98.
22 [4] Sneddon IN. The relation between load and penetration in the axisymetric Boussinesq problem for a punch of arbitrary profile. International Journal of Engineering Science 965; : [5] Ting TCT. The contact stresses between a rigid indenter and a viscoelastic half space. Journal of Applied Mechanics 966; :845. [6] Wittaker ET, Watson GN. A course of modern analysis, 97. Cambridge University Press. [7] Webster MN, Sayles RS. A numerical model for the elastic frictionless contact of real rough surfaces. ASME 986; 8:4-. [8] Younguing J, Linquing Z. A full numerical solution for the elastic contact of three dimensional real rough surfaces. Wear 99; 57:5-6.
23 Figure captions Fig.. Contact cone / plane surface. Fig.. (a) Contact between two bodies of an arbitrary form, (b) Domain of intersection Γ. Fig.. Evolution of the function f ( k, ). ξ Fig. 4. Contact between a plane surface and (a) a spherical surface, (b) a conical surface and (c) a pyramidal surface. Fig. 5. Relaxation test. Fig. 6. Comparison of the relaxation curve and the reconstitution curve with four characteristic times. Fig. 7. Experimental device for a contact between a rubber block and (a) a sphere, (b) a cone, (c) a pyramid. Fig. 8. Evolution of the force upon the interpenetration for the sphere contact (a), the cone contact (b) and the pyramid contact (c). Fig. 9. Comparison between viscoelastic experimental results and analytic results for the spherical case (a), the conical case (b) and the pyramidal case (c).
24 P p(s) O α δ s a a r r Fig.. Contact cone / plane surface. 4
25 z b M x y b O M (a) δ σ σ Γ (b) Fig.. (a) Contact between two bodies of an arbitrary form, (b) Domain of intersection Γ. 5
26 f,5,45,4,5,,5,,5,,5 ξ =,5 ξ =,5 ξ = ξ =4 4 k 6 8 Fig.. Evolution of the function f ( k, ). ξ 6
27 P δ r α R R (a) P P δ α r (b) P P δ α r (c) P Fig. 4. Contact between a plane surface and (a) a spherical surface, (b) a conical surface and (c) a pyramidal surface. 7


28 Fig. 5. Relaxation test. 8
29 Relaxation test Prony's series,95,9,85 Stress (Mpa),8,75,7,65,6,55,5 4 5 Time ( seconds) Fig. 6. Comparison of the relaxation curve and the reconstitution curve with four characteristic times. 9
 Fig. 7.")

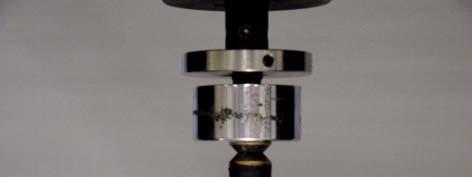

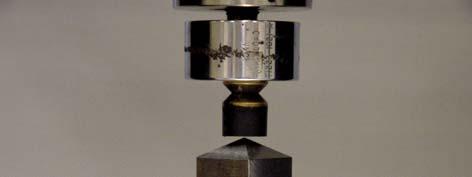

30 (a) (b) (c) Fig. 7. Experimental device for a contact between a rubber block and (a) a sphere, (b) a cone, (c) a pyramid.
31 6 5 4 Ln P -7,5-7 -6,5-6 -5,5 Ln δ (a) Ln P -6,8-6,6-6,4-6, -6-5,8-5,6-5,4-5, Ln δ 6 (b) 5 4 Ln P -6,6-6,4-6, -6-5,8-5,6 Ln δ (c) Fig. 8. Evolution of the force upon the interpenetration for the sphere contact (a), the cone contact (b) and the pyramid contact (c).
32 4 Viscoelastic analytic model Elastic analytic model Viscoelastic experiment Force (N) ,5,5,5,5 Interpenetration (mm) (a) Viscoelastic analytic model Elastic analytic model Viscoelastic experiment 5 Force (N) Interpenetration (mm) (b) Viscoelastic analytic model Elastic analytic model Viscoelastic experiment 5 Force(N) Interpenetration (mm) (c) Fig. 9. Comparison between viscoelastic experimental results and analytic results for the spherical case (a), the conical case (b) and the pyramidal case (c).
33 Table Parameters γ and Q for the various forms of contact surfaces. Shapes Spherical Conical Pyramidal γ / Q 8 R 4 π tgα 45 c p 4 / π tgα
34 Table Characteristic times and amplitudes for the rubber block. i 4 τ i (second) A (Mpa) i 4
35 Table Identification of the coefficients c s, cc et c p. Shape Spherical Conical Pyramidal c s C Experimentally Analytically c c c p 5
Numerical and experimental study of multi-contact on an elastic half-space
 Numerical and experimental study of multi-contact on an elastic half-space Julien Cesbron, HP Yin, Fabienne Anfosso-Lédée, Denis Duhamel, Donatien Le Houedec, Zi Qiang Feng To cite this version: Julien
Numerical and experimental study of multi-contact on an elastic half-space Julien Cesbron, HP Yin, Fabienne Anfosso-Lédée, Denis Duhamel, Donatien Le Houedec, Zi Qiang Feng To cite this version: Julien
Identification of model parameters from elastic/elasto-plastic spherical indentation
 Thomas Niederkofler a, Andreas Jäger a, Roman Lackner b a Institute for Mechanics of Materials and Structures (IMWS), Department of Civil Engineering, Vienna University of Technology, Vienna, Austria b
Thomas Niederkofler a, Andreas Jäger a, Roman Lackner b a Institute for Mechanics of Materials and Structures (IMWS), Department of Civil Engineering, Vienna University of Technology, Vienna, Austria b
Contact Mechanics and Elements of Tribology
 Contact Mechanics and Elements of Tribology Lectures 2-3. Mechanical Contact Vladislav A. Yastrebov MINES ParisTech, PSL Research University, Centre des Matériaux, CNRS UMR 7633, Evry, France @ Centre
Contact Mechanics and Elements of Tribology Lectures 2-3. Mechanical Contact Vladislav A. Yastrebov MINES ParisTech, PSL Research University, Centre des Matériaux, CNRS UMR 7633, Evry, France @ Centre
EFFECT OF STRAIN HARDENING ON ELASTIC-PLASTIC CONTACT BEHAVIOUR OF A SPHERE AGAINST A RIGID FLAT A FINITE ELEMENT STUDY
 Proceedings of the International Conference on Mechanical Engineering 2009 (ICME2009) 26-28 December 2009, Dhaka, Bangladesh ICME09- EFFECT OF STRAIN HARDENING ON ELASTIC-PLASTIC CONTACT BEHAVIOUR OF A
Proceedings of the International Conference on Mechanical Engineering 2009 (ICME2009) 26-28 December 2009, Dhaka, Bangladesh ICME09- EFFECT OF STRAIN HARDENING ON ELASTIC-PLASTIC CONTACT BEHAVIOUR OF A
Benchmarkingfiniteelement simulation of rigid indenters in elastomers S.J. Jerrams, N. Reece-Pinchin
 Benchmarkingfiniteelement simulation of rigid indenters in elastomers S.J. Jerrams, N. Reece-Pinchin Abstract Verifications of finite element techniques applied to elastomers are difficult to achieve since
Benchmarkingfiniteelement simulation of rigid indenters in elastomers S.J. Jerrams, N. Reece-Pinchin Abstract Verifications of finite element techniques applied to elastomers are difficult to achieve since
Finite element analysis of indentation experiments J.M. Olaf Fraunhofer-Insitut fur Werkstoffmechanik, Wohlerstr. 11, D-W Freiburg, Germany
 Finite element analysis of indentation experiments J.M. Olaf Fraunhofer-Insitut fur Werkstoffmechanik, Wohlerstr. 11, D-W- 7800 Freiburg, Germany ABSTRACT There are only a few methods suitable for a quantitative
Finite element analysis of indentation experiments J.M. Olaf Fraunhofer-Insitut fur Werkstoffmechanik, Wohlerstr. 11, D-W- 7800 Freiburg, Germany ABSTRACT There are only a few methods suitable for a quantitative
3 2 6 Solve the initial value problem u ( t) 3. a- If A has eigenvalues λ =, λ = 1 and corresponding eigenvectors 1
 3. a- If A has eigenvalues λ =, λ = 1 and corresponding eigenvectors 1") Math Problem a- If A has eigenvalues λ =, λ = 1 and corresponding eigenvectors 1 3 6 Solve the initial value problem u ( t) = Au( t) with u (0) =. 3 1 u 1 =, u 1 3 = b- True or false and why 1. if A is
Math Problem a- If A has eigenvalues λ =, λ = 1 and corresponding eigenvectors 1 3 6 Solve the initial value problem u ( t) = Au( t) with u (0) =. 3 1 u 1 =, u 1 3 = b- True or false and why 1. if A is
UNLOADING OF AN ELASTIC-PLASTIC LOADED SPHERICAL CONTACT
 2004 AIMETA International Tribology Conference, September 14-17, 2004, Rome, Italy UNLOADING OF AN ELASTIC-PLASTIC LOADED SPHERICAL CONTACT Yuri KLIGERMAN( ), Yuri Kadin( ), Izhak ETSION( ) Faculty of
2004 AIMETA International Tribology Conference, September 14-17, 2004, Rome, Italy UNLOADING OF AN ELASTIC-PLASTIC LOADED SPHERICAL CONTACT Yuri KLIGERMAN( ), Yuri Kadin( ), Izhak ETSION( ) Faculty of
Zanaboni Theorem and Saint-Venant s Principle
 Zanaboni Theorem and Saint-Venant s Principle Jian-zhong Zhao Geophysics Department College of Resource, Environment and Earth Sciences Yunnan University Kunming, Yunnan, China Email: jzhzhaokm@yahoo.com.cn
Zanaboni Theorem and Saint-Venant s Principle Jian-zhong Zhao Geophysics Department College of Resource, Environment and Earth Sciences Yunnan University Kunming, Yunnan, China Email: jzhzhaokm@yahoo.com.cn
A CONTACT-MECHANICS BASED MODEL FOR DISHING AND EROSION IN
 Mat. Res. Soc. Symp. Proc. Vol. 671 001 Materials Research Society A CONTACT-MECHANICS BASED MODEL FOR DISHING AND EROSION IN CHEMICAL-MECHANICAL POLISHING Joost J. Vlassak Division of Engineering and
Mat. Res. Soc. Symp. Proc. Vol. 671 001 Materials Research Society A CONTACT-MECHANICS BASED MODEL FOR DISHING AND EROSION IN CHEMICAL-MECHANICAL POLISHING Joost J. Vlassak Division of Engineering and
Predeformation and frequency-dependence : Experiment and FE analysis
 Predeformation and frequency-dependence : Experiment and FE analysis Nidhal Jridi 1,2,*, Michelle Salvia 2, Adel Hamdi 1, Olivier Bareille 2, Makrem Arfaoui 1, Mohammed Ichchou 2, Jalel Ben Abdallah 1
Predeformation and frequency-dependence : Experiment and FE analysis Nidhal Jridi 1,2,*, Michelle Salvia 2, Adel Hamdi 1, Olivier Bareille 2, Makrem Arfaoui 1, Mohammed Ichchou 2, Jalel Ben Abdallah 1
SCIENTIFIC PAPERS OF THE UNIVERSITY OF PARDUBICE NONLINEAR WHEEL/RAIL CONTACT GEOMETRY CHARACTERISTICS & DETERMINATION OF HERTZIAN CONTACT
 SCIENTIFIC PAPERS OF THE UNIVERSITY OF PARDUBICE Series B Jan Perner Transport Faculty 19 (2014) NONLINEAR WHEEL/RAIL CONTACT GEOMETRY CHARACTERISTICS & DETERMINATION OF HERTZIAN CONTACT Altan ONAT, Petr
SCIENTIFIC PAPERS OF THE UNIVERSITY OF PARDUBICE Series B Jan Perner Transport Faculty 19 (2014) NONLINEAR WHEEL/RAIL CONTACT GEOMETRY CHARACTERISTICS & DETERMINATION OF HERTZIAN CONTACT Altan ONAT, Petr
Effect of Strain Hardening on Unloading of a Deformable Sphere Loaded against a Rigid Flat A Finite Element Study
 Effect of Strain Hardening on Unloading of a Deformable Sphere Loaded against a Rigid Flat A Finite Element Study Biplab Chatterjee, Prasanta Sahoo 1 Department of Mechanical Engineering, Jadavpur University
Effect of Strain Hardening on Unloading of a Deformable Sphere Loaded against a Rigid Flat A Finite Element Study Biplab Chatterjee, Prasanta Sahoo 1 Department of Mechanical Engineering, Jadavpur University
Abstract. 1 Introduction
 Elasto-plastic contact of rough surfaces K. Willner Institute A of Mechanics, University of Stuttgart, D-70550 Stuttgart, Germany E-mail: willner@mecha. uni-stuttgart. de Abstract If two rough surfaces
Elasto-plastic contact of rough surfaces K. Willner Institute A of Mechanics, University of Stuttgart, D-70550 Stuttgart, Germany E-mail: willner@mecha. uni-stuttgart. de Abstract If two rough surfaces
UNIVERSITY OF SASKATCHEWAN ME MECHANICS OF MATERIALS I FINAL EXAM DECEMBER 13, 2008 Professor A. Dolovich
 UNIVERSITY OF SASKATCHEWAN ME 313.3 MECHANICS OF MATERIALS I FINAL EXAM DECEMBER 13, 2008 Professor A. Dolovich A CLOSED BOOK EXAMINATION TIME: 3 HOURS For Marker s Use Only LAST NAME (printed): FIRST
UNIVERSITY OF SASKATCHEWAN ME 313.3 MECHANICS OF MATERIALS I FINAL EXAM DECEMBER 13, 2008 Professor A. Dolovich A CLOSED BOOK EXAMINATION TIME: 3 HOURS For Marker s Use Only LAST NAME (printed): FIRST
hal , version 1-15 Jan 2013
 Author manuscript, published in "International Journal of Mechanical Sciences, 1 (1) -" DOI :.1/j.ijmecsci..0.0 Elsevier Editorial System(tm) for International Journal of Mechanical Sciences Manuscript
Author manuscript, published in "International Journal of Mechanical Sciences, 1 (1) -" DOI :.1/j.ijmecsci..0.0 Elsevier Editorial System(tm) for International Journal of Mechanical Sciences Manuscript
STUDIES ON NANO-INDENTATION OF POLYMERIC THIN FILMS USING FINITE ELEMENT METHODS
 STUDIES ON NANO-INDENTATION OF POLYMERIC THIN FILMS USING FINITE ELEMENT METHODS Shen Xiaojun, Yi Sung, Lallit Anand Singapore-MIT Alliance E4-04-0, 4 Engineering Drive 3, Singapore 7576 Zeng Kaiyang Institute
STUDIES ON NANO-INDENTATION OF POLYMERIC THIN FILMS USING FINITE ELEMENT METHODS Shen Xiaojun, Yi Sung, Lallit Anand Singapore-MIT Alliance E4-04-0, 4 Engineering Drive 3, Singapore 7576 Zeng Kaiyang Institute
Computational Modelling of the Surface Roughness Effects on the Thermal-elastohydrodynamic Lubrication Problem
 Proceedings of the International Conference on Heat Transfer and Fluid Flow Prague, Czech Republic, August 11-12, 2014 Paper No. 192 Computational Modelling of the Surface Roughness Effects on the Thermal-elastohydrodynamic
Proceedings of the International Conference on Heat Transfer and Fluid Flow Prague, Czech Republic, August 11-12, 2014 Paper No. 192 Computational Modelling of the Surface Roughness Effects on the Thermal-elastohydrodynamic
8. Contact Mechanics DE2-EA 2.1: M4DE. Dr Connor Myant 2017/2018
 DE2-EA 2.1: M4DE Dr Connor Myant 2017/2018 8. Contact Mechanics Comments and corrections to connor.myant@imperial.ac.uk Lecture resources may be found on Blackboard and at http://connormyant.com Contents
DE2-EA 2.1: M4DE Dr Connor Myant 2017/2018 8. Contact Mechanics Comments and corrections to connor.myant@imperial.ac.uk Lecture resources may be found on Blackboard and at http://connormyant.com Contents
The Effect of Coefficient of Restitution for Two Collision Models
 The Effect of Coefficient of Restitution for Two Collision Models ALACI STELIAN 1, FILOTE CONSTANTIN 2, CIORNEI FLORINA-CARMEN 1 1 Mechanics and Technologies Department 2 The Computers, Electronics and
The Effect of Coefficient of Restitution for Two Collision Models ALACI STELIAN 1, FILOTE CONSTANTIN 2, CIORNEI FLORINA-CARMEN 1 1 Mechanics and Technologies Department 2 The Computers, Electronics and
ADHESION OF AN AXISYMMETRIC ELASTIC BODY: RANGES OF VALIDITY OF MONOMIAL APPROXIMATIONS AND A TRANSITION MODEL
 ADHESION OF AN AXISYMMETRIC ELASTIC BODY: RANGES OF VALIDITY OF MONOMIAL APPROXIMATIONS AND A TRANSITION MODEL A Thesis Presented By Fouad Oweiss to The Department of Mechanical and Industrial Engineering
ADHESION OF AN AXISYMMETRIC ELASTIC BODY: RANGES OF VALIDITY OF MONOMIAL APPROXIMATIONS AND A TRANSITION MODEL A Thesis Presented By Fouad Oweiss to The Department of Mechanical and Industrial Engineering
FINITE ELEMENT ANALYSIS OF SLIDING CONTACT BETWEEN A CIRCULAR ASPERITY AND AN ELASTIC URFACE IN PLANE STRAIN CONDITION
 7 th International LS-DYNA Users Conference Simulation Technology (1) FINITE ELEMENT ANALYSIS OF SLIDING CONTACT BETWEEN A CIRCULAR ASPERITY AND AN ELASTIC URFACE IN PLANE STRAIN CONDITION S. Subutay Akarca,
7 th International LS-DYNA Users Conference Simulation Technology (1) FINITE ELEMENT ANALYSIS OF SLIDING CONTACT BETWEEN A CIRCULAR ASPERITY AND AN ELASTIC URFACE IN PLANE STRAIN CONDITION S. Subutay Akarca,
Linearized theory of elasticity
 Linearized theory of elasticity Arie Verhoeven averhoev@win.tue.nl CASA Seminar, May 24, 2006 Seminar: Continuum mechanics 1 Stress and stress principles Bart Nowak March 8 2 Strain and deformation Mark
Linearized theory of elasticity Arie Verhoeven averhoev@win.tue.nl CASA Seminar, May 24, 2006 Seminar: Continuum mechanics 1 Stress and stress principles Bart Nowak March 8 2 Strain and deformation Mark
Fig. 1. Circular fiber and interphase between the fiber and the matrix.
 Finite element unit cell model based on ABAQUS for fiber reinforced composites Tian Tang Composites Manufacturing & Simulation Center, Purdue University West Lafayette, IN 47906 1. Problem Statement In
Finite element unit cell model based on ABAQUS for fiber reinforced composites Tian Tang Composites Manufacturing & Simulation Center, Purdue University West Lafayette, IN 47906 1. Problem Statement In
Chapter 7. Highlights:
 Chapter 7 Highlights: 1. Understand the basic concepts of engineering stress and strain, yield strength, tensile strength, Young's(elastic) modulus, ductility, toughness, resilience, true stress and true
Chapter 7 Highlights: 1. Understand the basic concepts of engineering stress and strain, yield strength, tensile strength, Young's(elastic) modulus, ductility, toughness, resilience, true stress and true
Figure 43. Some common mechanical systems involving contact.
 33 Demonstration: experimental surface measurement ADE PhaseShift Whitelight Interferometer Surface measurement Surface characterization - Probability density function - Statistical analyses - Autocorrelation
33 Demonstration: experimental surface measurement ADE PhaseShift Whitelight Interferometer Surface measurement Surface characterization - Probability density function - Statistical analyses - Autocorrelation
Transactions on Engineering Sciences vol 1, 1993 WIT Press, ISSN
 Theoretical and experimental analysis of the rolling contact between two cylinders coated with multilayered, viscoelastic rubber G.F.M. Braat^, J.J. Kalker" "Delft University of Technology, Department
Theoretical and experimental analysis of the rolling contact between two cylinders coated with multilayered, viscoelastic rubber G.F.M. Braat^, J.J. Kalker" "Delft University of Technology, Department
IMPROVED METHOD TO DETERMINE THE HARDNESS AND ELASTIC MODULI USING NANO-INDENTATION
 KMITL Sci. J. Vol. 5 No. Jan-Jun 005 IMPROVED METHOD TO DETERMINE THE HARDNESS AND ELASTIC MODULI USING NANO-INDENTATION Nurot Panich*, Sun Yong School of Materials Engineering, Nanyang Technological University,
KMITL Sci. J. Vol. 5 No. Jan-Jun 005 IMPROVED METHOD TO DETERMINE THE HARDNESS AND ELASTIC MODULI USING NANO-INDENTATION Nurot Panich*, Sun Yong School of Materials Engineering, Nanyang Technological University,
Discrete Element Study of Aggregate Damage during Asphalt Compaction
 0 0 0 0 Discrete Element Study of Aggregate Damage during Asphalt Compaction Erik Olsson, Denis Jelagin, Manfred Partl ( KTH Royal Institute of Technology, Department of Civil and Architectural Engineering,
0 0 0 0 Discrete Element Study of Aggregate Damage during Asphalt Compaction Erik Olsson, Denis Jelagin, Manfred Partl ( KTH Royal Institute of Technology, Department of Civil and Architectural Engineering,
Arbitrary Normal and Tangential Loading Sequences for Circular Hertzian Contact
 Arbitrary Normal and Tangential Loading Sequences for Circular Hertzian Contact Philip P. Garland 1 and Robert J. Rogers 2 1 School of Biomedical Engineering, Dalhousie University, Canada 2 Department
Arbitrary Normal and Tangential Loading Sequences for Circular Hertzian Contact Philip P. Garland 1 and Robert J. Rogers 2 1 School of Biomedical Engineering, Dalhousie University, Canada 2 Department
(Received 5 May 1980; accepted for print 21 September 1980)
") MECHANICS RESEARCH COMMUNICATIONS Vol. 7(6),351-358,1980. Printed in the USA. 0093-6413/80/060351-08502.00/0 Copyright (c) Pergamon Press Ltd ON THE DISPLACEMENT INDUCED IN A RIGID CIRCULAR PUNCH ON AN
MECHANICS RESEARCH COMMUNICATIONS Vol. 7(6),351-358,1980. Printed in the USA. 0093-6413/80/060351-08502.00/0 Copyright (c) Pergamon Press Ltd ON THE DISPLACEMENT INDUCED IN A RIGID CIRCULAR PUNCH ON AN
Lecture 8 Viscoelasticity and Deformation
 Read: pg 130 168 (rest of Chpt. 4) 1 Poisson s Ratio, µ (pg. 115) Ratio of the strain in the direction perpendicular to the applied force to the strain in the direction of the applied force. For uniaxial
Read: pg 130 168 (rest of Chpt. 4) 1 Poisson s Ratio, µ (pg. 115) Ratio of the strain in the direction perpendicular to the applied force to the strain in the direction of the applied force. For uniaxial
Advanced Friction Modeling in Sheet Metal Forming
 Advanced Friction Modeling in Sheet Metal Forming J.Hol 1,a, M.V. Cid Alfaro 2, T. Meinders 3, J. Huétink 3 1 Materials innovation institute (M2i), P.O. box 58, 26 GA Delft, The Netherlands 2 Tata Steel
Advanced Friction Modeling in Sheet Metal Forming J.Hol 1,a, M.V. Cid Alfaro 2, T. Meinders 3, J. Huétink 3 1 Materials innovation institute (M2i), P.O. box 58, 26 GA Delft, The Netherlands 2 Tata Steel
ME 383S Bryant February 17, 2006 CONTACT. Mechanical interaction of bodies via surfaces
 ME 383S Bryant February 17, 2006 CONTACT 1 Mechanical interaction of bodies via surfaces Surfaces must touch Forces press bodies together Size (area) of contact dependent on forces, materials, geometry,
ME 383S Bryant February 17, 2006 CONTACT 1 Mechanical interaction of bodies via surfaces Surfaces must touch Forces press bodies together Size (area) of contact dependent on forces, materials, geometry,
Elastic-plastic Contact of a Deformable Sphere Against a Rigid Flat for Varying Material Properties Under Full Stick Contact Condition
 B. CHATTERJEE, P. SAHOO Elastic-plastic Contact of a Deformable Sphere Against a Rigid Flat for Varying Material Properties Under Full Stick Contact Condition RESEARCH The present study considers finite
B. CHATTERJEE, P. SAHOO Elastic-plastic Contact of a Deformable Sphere Against a Rigid Flat for Varying Material Properties Under Full Stick Contact Condition RESEARCH The present study considers finite
STUDY OF THE MECHANICAL BEHAVIOUR OF THE BALLAST USING
 STUDY OF THE MECHANICAL BEHAVIOUR OF THE BALLAST USING DISCRETE APPROACH C. CHOLET 1, X. OVIEDO 1-2, G. COMBE 3, P.E. GAUTIER 1, K. SAB 4, J.J. MOREAU 3, G. FORET 2, F. JOSSE 5, L.M. CLEON 1 1 SNCF, Direction
STUDY OF THE MECHANICAL BEHAVIOUR OF THE BALLAST USING DISCRETE APPROACH C. CHOLET 1, X. OVIEDO 1-2, G. COMBE 3, P.E. GAUTIER 1, K. SAB 4, J.J. MOREAU 3, G. FORET 2, F. JOSSE 5, L.M. CLEON 1 1 SNCF, Direction
CONTACT MODEL FOR A ROUGH SURFACE
 23 Paper presented at Bucharest, Romania CONTACT MODEL FOR A ROUGH SURFACE Sorin CĂNĂNĂU Polytechnic University of Bucharest, Dep. of Machine Elements & Tribology, ROMANIA s_cananau@yahoo.com ABSTRACT
23 Paper presented at Bucharest, Romania CONTACT MODEL FOR A ROUGH SURFACE Sorin CĂNĂNĂU Polytechnic University of Bucharest, Dep. of Machine Elements & Tribology, ROMANIA s_cananau@yahoo.com ABSTRACT
Analysis of contact deformation between a coated flat plate and a sphere and its practical application
 Computer Methods and Experimental Measurements for Surface Effects and Contact Mechanics VII 307 Analysis of contact deformation between a coated flat plate and a sphere and its practical application T.
Computer Methods and Experimental Measurements for Surface Effects and Contact Mechanics VII 307 Analysis of contact deformation between a coated flat plate and a sphere and its practical application T.
Mechanics of Earthquakes and Faulting
 Mechanics of Earthquakes and Faulting www.geosc.psu.edu/courses/geosc508 Overview Milestones in continuum mechanics Concepts of modulus and stiffness. Stress-strain relations Elasticity Surface and body
Mechanics of Earthquakes and Faulting www.geosc.psu.edu/courses/geosc508 Overview Milestones in continuum mechanics Concepts of modulus and stiffness. Stress-strain relations Elasticity Surface and body
COMPUTATION OF THE COMPLIANCE MATRIX FOR ROTARY LIP SEAL
 COMPUTATION OF THE COMPLIANCE MATRIX FOR ROTARY LIP SEAL Elgadari M a, Fatu A b, Hajjam M b, Belhaq M c a Université Moulay Ismail, ENSAM, Meknès, Morocco. b InstitutPprime, Département Génie Mécanique
COMPUTATION OF THE COMPLIANCE MATRIX FOR ROTARY LIP SEAL Elgadari M a, Fatu A b, Hajjam M b, Belhaq M c a Université Moulay Ismail, ENSAM, Meknès, Morocco. b InstitutPprime, Département Génie Mécanique
On the torsion of functionally graded anisotropic linearly elastic bars
 IMA Journal of Applied Mathematics (2007) 72, 556 562 doi:10.1093/imamat/hxm027 Advance Access publication on September 25, 2007 edicated with admiration to Robin Knops On the torsion of functionally graded
IMA Journal of Applied Mathematics (2007) 72, 556 562 doi:10.1093/imamat/hxm027 Advance Access publication on September 25, 2007 edicated with admiration to Robin Knops On the torsion of functionally graded
A Finite Element Study of the Residual Stress and Deformation in Hemispherical Contacts
 obert Jackson 1 Mem. ASME e-mail: robert.jackson@eng.auburn.edu Itti Chusoipin Itzhak Green Fellow, ASME George W. Woodruff School of Mechanical Engineering, Georgia Institute of Technology, Atlanta, GA
obert Jackson 1 Mem. ASME e-mail: robert.jackson@eng.auburn.edu Itti Chusoipin Itzhak Green Fellow, ASME George W. Woodruff School of Mechanical Engineering, Georgia Institute of Technology, Atlanta, GA
Scanning Nanoindentation - One example of a quantitative SPM technique
 Scanning Nanoindentation - One example of a quantitative SPM technique Topics Mechanical characterization on the nanoscale The basic idea Some models Some issues Instrumentation Tribological characteriazation
Scanning Nanoindentation - One example of a quantitative SPM technique Topics Mechanical characterization on the nanoscale The basic idea Some models Some issues Instrumentation Tribological characteriazation
Example-3. Title. Description. Cylindrical Hole in an Infinite Mohr-Coulomb Medium
 Example-3 Title Cylindrical Hole in an Infinite Mohr-Coulomb Medium Description The problem concerns the determination of stresses and displacements for the case of a cylindrical hole in an infinite elasto-plastic
Example-3 Title Cylindrical Hole in an Infinite Mohr-Coulomb Medium Description The problem concerns the determination of stresses and displacements for the case of a cylindrical hole in an infinite elasto-plastic
Game Physics. Game and Media Technology Master Program - Utrecht University. Dr. Nicolas Pronost
 Game and Media Technology Master Program - Utrecht University Dr. Nicolas Pronost Soft body physics Soft bodies In reality, objects are not purely rigid for some it is a good approximation but if you hit
Game and Media Technology Master Program - Utrecht University Dr. Nicolas Pronost Soft body physics Soft bodies In reality, objects are not purely rigid for some it is a good approximation but if you hit
Stresses and Strains in flexible Pavements
 Stresses and Strains in flexible Pavements Multi Layered Elastic System Assumptions in Multi Layered Elastic Systems The material properties of each layer are homogeneous property at point A i is the same
Stresses and Strains in flexible Pavements Multi Layered Elastic System Assumptions in Multi Layered Elastic Systems The material properties of each layer are homogeneous property at point A i is the same
Lecture 8 Viscoelasticity and Deformation
 HW#5 Due 2/13 (Friday) Lab #1 Due 2/18 (Next Wednesday) For Friday Read: pg 130 168 (rest of Chpt. 4) 1 Poisson s Ratio, μ (pg. 115) Ratio of the strain in the direction perpendicular to the applied force
HW#5 Due 2/13 (Friday) Lab #1 Due 2/18 (Next Wednesday) For Friday Read: pg 130 168 (rest of Chpt. 4) 1 Poisson s Ratio, μ (pg. 115) Ratio of the strain in the direction perpendicular to the applied force
Elastodynamic contact in plate-like bodies
 Structures Under Shock and Impact IX 65 Elastodynamic contact in plate-like bodies R. Sburlati Department of Structural and Geotechnical Engineering, Genoa University, Italy Abstract In this paper the
Structures Under Shock and Impact IX 65 Elastodynamic contact in plate-like bodies R. Sburlati Department of Structural and Geotechnical Engineering, Genoa University, Italy Abstract In this paper the
CHAPTER THREE SYMMETRIC BENDING OF CIRCLE PLATES
 CHAPTER THREE SYMMETRIC BENDING OF CIRCLE PLATES * Governing equations in beam and plate bending ** Solution by superposition 1.1 From Beam Bending to Plate Bending 1.2 Governing Equations For Symmetric
CHAPTER THREE SYMMETRIC BENDING OF CIRCLE PLATES * Governing equations in beam and plate bending ** Solution by superposition 1.1 From Beam Bending to Plate Bending 1.2 Governing Equations For Symmetric
Thermal Contact Resistance of Nonconforming Rough Surfaces, Part 1: Contact Mechanics Model
 JOURNAL OF THERMOPHYSICS AND HEAT TRANSFER Vol. 18, No. 2, April June 24 Thermal Contact Resistance of Nonconforming Rough Surfaces, Part 1: Contact Mechanics Model M. Bahrami, J. R. Culham, M. M. Yovanovich,
JOURNAL OF THERMOPHYSICS AND HEAT TRANSFER Vol. 18, No. 2, April June 24 Thermal Contact Resistance of Nonconforming Rough Surfaces, Part 1: Contact Mechanics Model M. Bahrami, J. R. Culham, M. M. Yovanovich,
Influence of friction in material characterization in microindentation measurement
 Influence of friction in material characterization in microindentation measurement W.C. Guo a,b,, G. Rauchs c, W.H. Zhang b, J.P. Ponthot a a LTAS. Department of Aerospace & Mechanical Engineering, University
Influence of friction in material characterization in microindentation measurement W.C. Guo a,b,, G. Rauchs c, W.H. Zhang b, J.P. Ponthot a a LTAS. Department of Aerospace & Mechanical Engineering, University
3-D Finite Element Analysis of Instrumented Indentation of Transversely Isotropic Materials
 3-D Finite Element Analysis of Instrumented Indentation of Transversely Isotropic Materials Abstract: Talapady S. Bhat and T. A. Venkatesh Department of Material Science and Engineering Stony Brook University,
3-D Finite Element Analysis of Instrumented Indentation of Transversely Isotropic Materials Abstract: Talapady S. Bhat and T. A. Venkatesh Department of Material Science and Engineering Stony Brook University,
Damping of materials and members in structures
 Journal of Physics: Conference Series Damping of materials and members in structures To cite this article: F Orban 0 J. Phys.: Conf. Ser. 68 00 View the article online for updates and enhancements. Related
Journal of Physics: Conference Series Damping of materials and members in structures To cite this article: F Orban 0 J. Phys.: Conf. Ser. 68 00 View the article online for updates and enhancements. Related
Friction Properties of Surface with Circular Micro-patterns
 Friction Properties of Surface with Circular Micro-patterns Hideo Koguchi Mechanical Engineering, 603- Kamitomioka, Nagaoka Univ. of Tech., Nagaoka, Niigata, Japan Email: koguchi@mech.nagaokaut.ac.jp Takayoshi
Friction Properties of Surface with Circular Micro-patterns Hideo Koguchi Mechanical Engineering, 603- Kamitomioka, Nagaoka Univ. of Tech., Nagaoka, Niigata, Japan Email: koguchi@mech.nagaokaut.ac.jp Takayoshi
A FINITE ELEMENT STUDY OF ELASTIC-PLASTIC HEMISPHERICAL CONTACT BEHAVIOR AGAINST A RIGID FLAT UNDER VARYING MODULUS OF ELASTICITY AND SPHERE RADIUS
 Proceedings of the International Conference on Mechanical Engineering 2009 (ICME2009) 26-28 December 2009, Dhaka, Bangladesh ICME09- A FINITE ELEMENT STUDY OF ELASTIC-PLASTIC HEMISPHERICAL CONTACT BEHAVIOR
Proceedings of the International Conference on Mechanical Engineering 2009 (ICME2009) 26-28 December 2009, Dhaka, Bangladesh ICME09- A FINITE ELEMENT STUDY OF ELASTIC-PLASTIC HEMISPHERICAL CONTACT BEHAVIOR
Rutgers University Department of Physics & Astronomy. 01:750:271 Honors Physics I Fall Lecture 19. Home Page. Title Page. Page 1 of 36.
 Rutgers University Department of Physics & Astronomy 01:750:271 Honors Physics I Fall 2015 Lecture 19 Page 1 of 36 12. Equilibrium and Elasticity How do objects behave under applied external forces? Under
Rutgers University Department of Physics & Astronomy 01:750:271 Honors Physics I Fall 2015 Lecture 19 Page 1 of 36 12. Equilibrium and Elasticity How do objects behave under applied external forces? Under
The Dynamic Stress State of the Wheel-Rail Contact
 Proceedings of the 2nd IASME / WSEAS International Conference on Continuum Mechanics (CM'07), Portoroz, Slovenia, May 15-17, 2007 127 The Dynamic Stress State of the Wheel-Rail Contact XIN ZHAO *, ZILI
Proceedings of the 2nd IASME / WSEAS International Conference on Continuum Mechanics (CM'07), Portoroz, Slovenia, May 15-17, 2007 127 The Dynamic Stress State of the Wheel-Rail Contact XIN ZHAO *, ZILI
A COMPACT MODEL FOR SPHERICAL ROUGH CONTACTS
 A COMPACT MODEL FOR SPHERICAL ROUGH CONTACTS Majid Bahrami M. M. Yovanovich J. R. Culham Microelectronics Heat Transfer Laboratory Department of Mechanical Engineering University of Waterloo Ontario, Canada
A COMPACT MODEL FOR SPHERICAL ROUGH CONTACTS Majid Bahrami M. M. Yovanovich J. R. Culham Microelectronics Heat Transfer Laboratory Department of Mechanical Engineering University of Waterloo Ontario, Canada
a Write down the coordinates of the point on the curve where t = 2. b Find the value of t at the point on the curve with coordinates ( 5 4, 8).
.") Worksheet A 1 A curve is given by the parametric equations x = t + 1, y = 4 t. a Write down the coordinates of the point on the curve where t =. b Find the value of t at the point on the curve with coordinates
Worksheet A 1 A curve is given by the parametric equations x = t + 1, y = 4 t. a Write down the coordinates of the point on the curve where t =. b Find the value of t at the point on the curve with coordinates
Characterisation of the mechanical behaviour of a polyurethane elastomer based on indentation and tensile creep experiments
 Materials Characterisation VI 3 Characterisation of the mechanical behaviour of a polyurethane elastomer based on indentation and tensile creep experiments B. Buffel 1, K. Vanstreels 2, F. Desplentere
Materials Characterisation VI 3 Characterisation of the mechanical behaviour of a polyurethane elastomer based on indentation and tensile creep experiments B. Buffel 1, K. Vanstreels 2, F. Desplentere
Modeling Contact between Rigid Sphere and Elastic Layer Bonded to Rigid Substrate
 IEEE TRANSACTIONS ON COMPONENTS AND PACKAGING TECHNOLOGIES, VOL. 24, NO. 2, JUNE 2001 207 Modeling Contact between Rigid Sphere and Elastic Layer Bonded to Rigid Substrate Mirko Stevanović, M. Michael
IEEE TRANSACTIONS ON COMPONENTS AND PACKAGING TECHNOLOGIES, VOL. 24, NO. 2, JUNE 2001 207 Modeling Contact between Rigid Sphere and Elastic Layer Bonded to Rigid Substrate Mirko Stevanović, M. Michael
A Finite Element Study of Elastic-Plastic Hemispherical Contact Behavior against a Rigid Flat under Varying Modulus of Elasticity and Sphere Radius
 Engineering, 2010, 2, 205-211 doi:10.4236/eng.2010.24030 Published Online April 2010 (http://www. SciRP.org/journal/eng) 205 A Finite Element Study of Elastic-Plastic Hemispherical Contact Behavior against
Engineering, 2010, 2, 205-211 doi:10.4236/eng.2010.24030 Published Online April 2010 (http://www. SciRP.org/journal/eng) 205 A Finite Element Study of Elastic-Plastic Hemispherical Contact Behavior against
VORONOI APPLIED ELEMENT METHOD FOR STRUCTURAL ANALYSIS: THEORY AND APPLICATION FOR LINEAR AND NON-LINEAR MATERIALS
 The 4 th World Conference on Earthquake Engineering October -7, 008, Beijing, China VORONOI APPLIED ELEMENT METHOD FOR STRUCTURAL ANALYSIS: THEORY AND APPLICATION FOR LINEAR AND NON-LINEAR MATERIALS K.
The 4 th World Conference on Earthquake Engineering October -7, 008, Beijing, China VORONOI APPLIED ELEMENT METHOD FOR STRUCTURAL ANALYSIS: THEORY AND APPLICATION FOR LINEAR AND NON-LINEAR MATERIALS K.
Design of Pressure Vessel Pads and Attachments To Minimize Global Stress Concentrations
 Transactions, SMiRT 9, Toronto, August 007 Design of Pressure Vessel Pads and Attachments To Minimize Global Stress Concentrations Gordon S. Bjorkman ) ) Spent Fuel Storage and Transportation Division,
Transactions, SMiRT 9, Toronto, August 007 Design of Pressure Vessel Pads and Attachments To Minimize Global Stress Concentrations Gordon S. Bjorkman ) ) Spent Fuel Storage and Transportation Division,
Basic concepts to start Mechanics of Materials
 Basic concepts to start Mechanics of Materials Georges Cailletaud Centre des Matériaux Ecole des Mines de Paris/CNRS Notations Notations (maths) (1/2) A vector v (element of a vectorial space) can be seen
Basic concepts to start Mechanics of Materials Georges Cailletaud Centre des Matériaux Ecole des Mines de Paris/CNRS Notations Notations (maths) (1/2) A vector v (element of a vectorial space) can be seen
with Available online at Abstract gained in this and nanotechnology. Procedia Engineering 14 (2011)
") Available online at www.sciencedirect.com Procedia Engineering 14 (11) 4 41 The Twelfth East Asia-Pacific Conference on Structural Engineering and Construction Analysis of Rigid Frictionless Indentation
Available online at www.sciencedirect.com Procedia Engineering 14 (11) 4 41 The Twelfth East Asia-Pacific Conference on Structural Engineering and Construction Analysis of Rigid Frictionless Indentation
Mechanics PhD Preliminary Spring 2017
 Mechanics PhD Preliminary Spring 2017 1. (10 points) Consider a body Ω that is assembled by gluing together two separate bodies along a flat interface. The normal vector to the interface is given by n
Mechanics PhD Preliminary Spring 2017 1. (10 points) Consider a body Ω that is assembled by gluing together two separate bodies along a flat interface. The normal vector to the interface is given by n
Solving the torsion problem for isotropic matrial with a rectangular cross section using the FEM and FVM methods with triangular elements
 Solving the torsion problem for isotropic matrial with a rectangular cross section using the FEM and FVM methods with triangular elements Nasser M. Abbasi. June 0, 04 Contents Introduction. Problem setup...................................
Solving the torsion problem for isotropic matrial with a rectangular cross section using the FEM and FVM methods with triangular elements Nasser M. Abbasi. June 0, 04 Contents Introduction. Problem setup...................................
CANONICAL EQUATIONS. Application to the study of the equilibrium of flexible filaments and brachistochrone curves. By A.
 Équations canoniques. Application a la recherche de l équilibre des fils flexibles et des courbes brachystochrones, Mem. Acad. Sci de Toulouse (8) 7 (885), 545-570. CANONICAL EQUATIONS Application to the
Équations canoniques. Application a la recherche de l équilibre des fils flexibles et des courbes brachystochrones, Mem. Acad. Sci de Toulouse (8) 7 (885), 545-570. CANONICAL EQUATIONS Application to the
Micro-meso draping modelling of non-crimp fabrics
 Micro-meso draping modelling of non-crimp fabrics Oleksandr Vorobiov 1, Dr. Th. Bischoff 1, Dr. A. Tulke 1 1 FTA Forschungsgesellschaft für Textiltechnik mbh 1 Introduction Non-crimp fabrics (NCFs) are
Micro-meso draping modelling of non-crimp fabrics Oleksandr Vorobiov 1, Dr. Th. Bischoff 1, Dr. A. Tulke 1 1 FTA Forschungsgesellschaft für Textiltechnik mbh 1 Introduction Non-crimp fabrics (NCFs) are
EFFECT OF ELLIPTIC OR CIRCULAR HOLES ON THE STRESS DISTRIBUTION IN PLATES
 EFFECT OF ELLIPTIC OR CIRCULAR HOLES ON THE STRESS DISTRIBUTION IN PLATES OF WOOD OR PLYWOOD CONSIDERED AS ORTHOTROPIC MATERIALS Information Revied and Reaffirmed March 1956 No. 1510 EFFECT OF ELLIPTIC
EFFECT OF ELLIPTIC OR CIRCULAR HOLES ON THE STRESS DISTRIBUTION IN PLATES OF WOOD OR PLYWOOD CONSIDERED AS ORTHOTROPIC MATERIALS Information Revied and Reaffirmed March 1956 No. 1510 EFFECT OF ELLIPTIC
COMPRESSION AND BENDING STIFFNESS OF FIBER-REINFORCED ELASTOMERIC BEARINGS. Abstract. Introduction
 COMPRESSION AND BENDING STIFFNESS OF FIBER-REINFORCED ELASTOMERIC BEARINGS Hsiang-Chuan Tsai, National Taiwan University of Science and Technology, Taipei, Taiwan James M. Kelly, University of California,
COMPRESSION AND BENDING STIFFNESS OF FIBER-REINFORCED ELASTOMERIC BEARINGS Hsiang-Chuan Tsai, National Taiwan University of Science and Technology, Taipei, Taiwan James M. Kelly, University of California,
Experimental Investigation of Fully Plastic Contact of a Sphere Against a Hard Flat
 J. Jamari e-mail: j.jamari@ctw.utwente.nl D. J. Schipper University of Twente, Surface Technology and Tribology, Faculty of Engineering Technology, Drienerloolaan 5, Postbus 17, 7500 AE, Enschede, The
J. Jamari e-mail: j.jamari@ctw.utwente.nl D. J. Schipper University of Twente, Surface Technology and Tribology, Faculty of Engineering Technology, Drienerloolaan 5, Postbus 17, 7500 AE, Enschede, The
INTRODUCTION TO STRAIN
 SIMPLE STRAIN INTRODUCTION TO STRAIN In general terms, Strain is a geometric quantity that measures the deformation of a body. There are two types of strain: normal strain: characterizes dimensional changes,
SIMPLE STRAIN INTRODUCTION TO STRAIN In general terms, Strain is a geometric quantity that measures the deformation of a body. There are two types of strain: normal strain: characterizes dimensional changes,
EMA 3702 Mechanics & Materials Science (Mechanics of Materials) Chapter 2 Stress & Strain - Axial Loading
 Chapter 2 Stress & Strain - Axial Loading") MA 3702 Mechanics & Materials Science (Mechanics of Materials) Chapter 2 Stress & Strain - Axial Loading MA 3702 Mechanics & Materials Science Zhe Cheng (2018) 2 Stress & Strain - Axial Loading Statics
MA 3702 Mechanics & Materials Science (Mechanics of Materials) Chapter 2 Stress & Strain - Axial Loading MA 3702 Mechanics & Materials Science Zhe Cheng (2018) 2 Stress & Strain - Axial Loading Statics
The plastic behaviour of silicon subjected to micro-indentation
 JOURNAL OF MATERIALS SCIENCE 31 (1996) 5671-5676 The plastic behaviour of silicon subjected to micro-indentation L. ZHANG, M. MAHDI Centre for Advanced Materials Technology, Department of Mechanical and
JOURNAL OF MATERIALS SCIENCE 31 (1996) 5671-5676 The plastic behaviour of silicon subjected to micro-indentation L. ZHANG, M. MAHDI Centre for Advanced Materials Technology, Department of Mechanical and
1.033/1.57 Q#2: Elasticity Bounds Conical Indentation Test
 1.033/1.57 Q#: Elasticity Bounds Conical Indentation Test November 14, 003 MIT 1.033/1.57 Fall 003 Instructor: Franz-Josef UM Instrumented nano-indentation is a new technique in materials science and engineering
1.033/1.57 Q#: Elasticity Bounds Conical Indentation Test November 14, 003 MIT 1.033/1.57 Fall 003 Instructor: Franz-Josef UM Instrumented nano-indentation is a new technique in materials science and engineering
Dynamic Mechanical Analysis (DMA) of Polymers by Oscillatory Indentation
 of Polymers by Oscillatory Indentation") Dynamic Mechanical Analysis (DMA) of Polymers by Oscillatory Indentation By Jennifer Hay, Nanomechanics, Inc. Abstract This application note teaches the theory and practice of measuring the complex modulus
Dynamic Mechanical Analysis (DMA) of Polymers by Oscillatory Indentation By Jennifer Hay, Nanomechanics, Inc. Abstract This application note teaches the theory and practice of measuring the complex modulus
Keysight Technologies Instrumented Indentation Testing with the Keysight Nano Indenter G200. Application Note
 Keysight Technologies Instrumented Indentation Testing with the Keysight Nano Indenter G200 Application Note Introduction The scale of materials and machined components continues to decrease with advances
Keysight Technologies Instrumented Indentation Testing with the Keysight Nano Indenter G200 Application Note Introduction The scale of materials and machined components continues to decrease with advances
SSNS106 Damage of a reinforced concrete plate under requests varied with model GLRC_DM
 Titre : SSNS106 - Endommagement d une plaque plane sous so[...] Date : 01/03/2013 Page : 1/67 SSNS106 Damage of a reinforced concrete plate under requests varied with model GLRC_DM Summarized: This test
Titre : SSNS106 - Endommagement d une plaque plane sous so[...] Date : 01/03/2013 Page : 1/67 SSNS106 Damage of a reinforced concrete plate under requests varied with model GLRC_DM Summarized: This test
Prediction of the bilinear stress-strain curve of engineering material by nanoindentation test
 Prediction of the bilinear stress-strain curve of engineering material by nanoindentation test T.S. Yang, T.H. Fang, C.T. Kawn, G.L. Ke, S.Y. Chang Institute of Mechanical & Electro-Mechanical Engineering,
Prediction of the bilinear stress-strain curve of engineering material by nanoindentation test T.S. Yang, T.H. Fang, C.T. Kawn, G.L. Ke, S.Y. Chang Institute of Mechanical & Electro-Mechanical Engineering,
Gyroscopic matrixes of the straight beams and the discs
 Titre : Matrice gyroscopique des poutres droites et des di[...] Date : 29/05/2013 Page : 1/12 Gyroscopic matrixes of the straight beams and the discs Summarized: This document presents the formulation
Titre : Matrice gyroscopique des poutres droites et des di[...] Date : 29/05/2013 Page : 1/12 Gyroscopic matrixes of the straight beams and the discs Summarized: This document presents the formulation
AMME2261: Fluid Mechanics 1 Course Notes
 Module 1 Introduction and Fluid Properties Introduction Matter can be one of two states: solid or fluid. A fluid is a substance that deforms continuously under the application of a shear stress, no matter
Module 1 Introduction and Fluid Properties Introduction Matter can be one of two states: solid or fluid. A fluid is a substance that deforms continuously under the application of a shear stress, no matter
Homework Problems. ( σ 11 + σ 22 ) 2. cos (θ /2), ( σ θθ σ rr ) 2. ( σ 22 σ 11 ) 2
 2. cos (θ /2), ( σ θθ σ rr ) 2. ( σ 22 σ 11 ) 2") Engineering Sciences 47: Fracture Mechanics J. R. Rice, 1991 Homework Problems 1) Assuming that the stress field near a crack tip in a linear elastic solid is singular in the form σ ij = rλ Σ ij (θ), it
Engineering Sciences 47: Fracture Mechanics J. R. Rice, 1991 Homework Problems 1) Assuming that the stress field near a crack tip in a linear elastic solid is singular in the form σ ij = rλ Σ ij (θ), it
Finite Element Modeling of a Baseball
 Available online at www.sciencedirect.com Procedia Engineering 34 (2012 ) 610 615 9 th Conference of the International Sports Engineering Association (ISEA) Finite Element Modeling of a Baseball Brian
Available online at www.sciencedirect.com Procedia Engineering 34 (2012 ) 610 615 9 th Conference of the International Sports Engineering Association (ISEA) Finite Element Modeling of a Baseball Brian
Theory at a Glance (for IES, GATE, PSU)
") 1. Stress and Strain Theory at a Glance (for IES, GATE, PSU) 1.1 Stress () When a material is subjected to an external force, a resisting force is set up within the component. The internal resistance force
1. Stress and Strain Theory at a Glance (for IES, GATE, PSU) 1.1 Stress () When a material is subjected to an external force, a resisting force is set up within the component. The internal resistance force
MECHANICAL PROPERTIES OF HYDROGEL USING NANOINDENTATION
 MECHANICAL PROPERTIES OF HYDROGEL USING NANOINDENTATION Prepared by Duanjie Li, PhD & Jorge Ramirez 6 Morgan, Ste156, Irvine CA 9618 P: 949.461.99 F: 949.461.93 nanovea.com Today's standard for tomorrow's
MECHANICAL PROPERTIES OF HYDROGEL USING NANOINDENTATION Prepared by Duanjie Li, PhD & Jorge Ramirez 6 Morgan, Ste156, Irvine CA 9618 P: 949.461.99 F: 949.461.93 nanovea.com Today's standard for tomorrow's
Nonlinear Dynamics and Control of Crank-Slider Mechanism with Multiple Clearance Joints
 Journal of Theoretical and Applied Vibration and Acoustics 1 (1) 1-1 (15) Journal of Theoretical and Applied Vibration and Acoustics I S A V journal homepage: http://tava.isav.ir Nonlinear Dynamics and
Journal of Theoretical and Applied Vibration and Acoustics 1 (1) 1-1 (15) Journal of Theoretical and Applied Vibration and Acoustics I S A V journal homepage: http://tava.isav.ir Nonlinear Dynamics and
Chapter 6: Mechanical Properties of Metals. Dr. Feras Fraige
 Chapter 6: Mechanical Properties of Metals Dr. Feras Fraige Stress and Strain Tension Compression Shear Torsion Elastic deformation Plastic Deformation Yield Strength Tensile Strength Ductility Toughness
Chapter 6: Mechanical Properties of Metals Dr. Feras Fraige Stress and Strain Tension Compression Shear Torsion Elastic deformation Plastic Deformation Yield Strength Tensile Strength Ductility Toughness
ME 2570 MECHANICS OF MATERIALS
 ME 2570 MECHANICS OF MATERIALS Chapter III. Mechanical Properties of Materials 1 Tension and Compression Test The strength of a material depends on its ability to sustain a load without undue deformation
ME 2570 MECHANICS OF MATERIALS Chapter III. Mechanical Properties of Materials 1 Tension and Compression Test The strength of a material depends on its ability to sustain a load without undue deformation
S.P. Timoshenko Institute of Mechanics, National Academy of Sciences, Department of Fracture Mechanics, Kyiv, Ukraine
 CALCULATION OF THE PREFRACTURE ZONE AT THE CRACK TIP ON THE INTERFACE OF MEDIA A. Kaminsky a L. Kipnis b M. Dudik b G. Khazin b and A. Bykovtscev c a S.P. Timoshenko Institute of Mechanics National Academy
CALCULATION OF THE PREFRACTURE ZONE AT THE CRACK TIP ON THE INTERFACE OF MEDIA A. Kaminsky a L. Kipnis b M. Dudik b G. Khazin b and A. Bykovtscev c a S.P. Timoshenko Institute of Mechanics National Academy
Created by T. Madas LINE INTEGRALS. Created by T. Madas
 LINE INTEGRALS LINE INTEGRALS IN 2 DIMENSIONAL CARTESIAN COORDINATES Question 1 Evaluate the integral ( x + 2y) dx, C where C is the path along the curve with equation y 2 = x + 1, from ( ) 0,1 to ( )
LINE INTEGRALS LINE INTEGRALS IN 2 DIMENSIONAL CARTESIAN COORDINATES Question 1 Evaluate the integral ( x + 2y) dx, C where C is the path along the curve with equation y 2 = x + 1, from ( ) 0,1 to ( )
Ratcheting and Rolling Contact Fatigue Crack Initiation Life of Rails under Service Loading. Wenyi YAN Monash University, Australia
 Ratcheting and Rolling Contact Fatigue Crack Initiation Life of Rails under Service Loading Wenyi YAN Monash University, Australia Chung Lun PUN Peter Mutton Qianhua Kan Guozheng Kang Contents Introduction
Ratcheting and Rolling Contact Fatigue Crack Initiation Life of Rails under Service Loading Wenyi YAN Monash University, Australia Chung Lun PUN Peter Mutton Qianhua Kan Guozheng Kang Contents Introduction
Keywords: Elastic waves, Finite rotations, Areolar strain, Complex shear.
 Blucher Mechanical Engineering Proceedings May 14 vol. 1 num. 1 www.proceedings.blucher.com.br/evento/1wccm ELASTIC WAVES WITH FINITE ROTATIONS I. D. Kotchergenko Kotchergenko Engenharia Ltda. Belo Horizonte
Blucher Mechanical Engineering Proceedings May 14 vol. 1 num. 1 www.proceedings.blucher.com.br/evento/1wccm ELASTIC WAVES WITH FINITE ROTATIONS I. D. Kotchergenko Kotchergenko Engenharia Ltda. Belo Horizonte
ANALYTICAL MODEL FOR FRICTION FORCE BETWEEN A STEEL ROLLER AND A PLANE POLYMER SAMPLE IN SLIDING MOTION
 6 th International Conference Computational Mechanics and Virtual Engineering COMEC 015 15-16 October 015, Braşov, Romania ANALYTICAL MODEL FOR FRICTION FORCE BETWEEN A STEEL ROLLER AND A PLANE POLYMER
6 th International Conference Computational Mechanics and Virtual Engineering COMEC 015 15-16 October 015, Braşov, Romania ANALYTICAL MODEL FOR FRICTION FORCE BETWEEN A STEEL ROLLER AND A PLANE POLYMER
Mechanical Properties of Materials
 Mechanical Properties of Materials Strains Material Model Stresses Learning objectives Understand the qualitative and quantitative description of mechanical properties of materials. Learn the logic of
Mechanical Properties of Materials Strains Material Model Stresses Learning objectives Understand the qualitative and quantitative description of mechanical properties of materials. Learn the logic of
Elastic Model of a Deformable Fingertip
 Chapter 3 Elastic Model of a Deformable ingertip 3.1 Introduction To date, much research has been done on the manipulation of objects by softfingered robotic hands. Most of these studies, particularly
Chapter 3 Elastic Model of a Deformable ingertip 3.1 Introduction To date, much research has been done on the manipulation of objects by softfingered robotic hands. Most of these studies, particularly
Review of Thermal Joint Resistance Models for Non-Conforming Rough Surfaces in a Vacuum
 Review of Thermal Joint Resistance Models for Non-Conforming Rough Surfaces in a Vacuum M. Bahrami J. R. Culham M. M. Yovanovich G. E. Schneider Department of Mechanical Engineering Microelectronics Heat
Review of Thermal Joint Resistance Models for Non-Conforming Rough Surfaces in a Vacuum M. Bahrami J. R. Culham M. M. Yovanovich G. E. Schneider Department of Mechanical Engineering Microelectronics Heat
Soft Bodies. Good approximation for hard ones. approximation breaks when objects break, or deform. Generalization: soft (deformable) bodies
 bodies") Soft-Body Physics Soft Bodies Realistic objects are not purely rigid. Good approximation for hard ones. approximation breaks when objects break, or deform. Generalization: soft (deformable) bodies Deformed
Soft-Body Physics Soft Bodies Realistic objects are not purely rigid. Good approximation for hard ones. approximation breaks when objects break, or deform. Generalization: soft (deformable) bodies Deformed
Advanced Structural Analysis EGF Section Properties and Bending
 Advanced Structural Analysis EGF316 3. Section Properties and Bending 3.1 Loads in beams When we analyse beams, we need to consider various types of loads acting on them, for example, axial forces, shear
Advanced Structural Analysis EGF316 3. Section Properties and Bending 3.1 Loads in beams When we analyse beams, we need to consider various types of loads acting on them, for example, axial forces, shear