DESIGN USING TRANSFORMATION TECHNIQUE CLASSICAL METHOD
|
|
|
- Patrick Pearson
- 5 years ago
- Views:
Transcription



1 206 Spring Semester ELEC733 Digital Control System LECTURE 7: DESIGN USING TRANSFORMATION TECHNIQUE CLASSICAL METHOD
 lim z ( ) 2 z ( D ( z ) G ( z )) lim Tz Tz z 2 ( z ) D( z) G( z) 2 k a Acceleration error constant")
2 For a unit ramp input Tz Ez ( ) 2 ( z ) D( z) G( z) Tz e( ) lim( z) z 2 ( z ) D( z) G( z) Tz Tz lim lim z( z )( D( z) G( z)) z( z ) D( z) G( z) Similarly, e k v Velocity error constant 2 ( ) lim z ( ) 2 z ( D ( z ) G ( z )) lim Tz Tz z 2 ( z ) D( z) G( z) 2 k a Acceleration error constant 24
3 Remark: ( Truxal's Rule ) Yz ( ) Hz ( ) : the overall transfer function Rz ( ) Assume ( z z)( z z2) ( z zn ) H( z) K ( z p )( z p ) ( z p ) 2 and H( z) results from a Type system of G( z). n For unit step, steady-state error must be zero E( z) R( z) H( z) R( z) 0 H() --- () Y( z) E( z) Remark: H( z), Y( z) G( z) E( z), and R( z) R( z) G( z) 25
4 For a ramp input E( z) R( z)( H( z)) ( z ) 2 ( Hz ( )) Tz e( ) lim( z ) ( H( z)) z 2 ( z ) Hz ( ) lim --- (2) Tk z z v Tz k v We can use L'Hopital's rule. 26
5 ( d / dz)( H( z)) dh( z) lim lim Tk z ( / )( ) z v d dz z dz d d d Note : ln H( z) H( z) H( z) since H() dz H( z) dz dz Tk v d lim ln Hz ( ) z dz d ( zz ) i lim lnk z dz ( z pi ) d lim ln( z zi ) ln( z pi ) lnk z dz d d lim ( z zi ) ( z pi ) z z zi dz z pi dz n n Tk p z v i i i i 27
6 n n Tk p z v i i i i Imz pole - 0 zero Re z kv Errors are decreased pole 0 zero Large overshoot Poor dynamic response Small steady-state error against Good transient response 28
7 ex) Antenna system in p. 228 of Franklin s z G( z) where T sec ( z)( z0.9048) D( z) K ( proportional controller - static gain) KG( z) Hz ( ) KG( z) Characteristic polynomial z K 0 ( z )( z ) Design specifications : k, T 0sec ζ 0.5, T sec v s 4.6 σ r e T s
8 Imaginary Axis p /T 0.8 p /T Discrete root locus with and without compensation 0.7 p /T 0.6 p /T 0.5 p /T 0.4 p /T p /T p /T 0. p /T 0 p /T p /T p /T 0. p /T p /T 0.2 p /T p /T 0.3 p /T 0.6 p /T 0.4 p /T 0.5 p /T Real Axis without compensator D( Z) K ( p.0, p , z ) 2 z with D( z) 6.64, T sec (emulation) z ( p.0, p , z ) 2 30
9 Imz r ζ Re z The system goes unstable at K 9 where k v That means there is no value of gain that meets the steady-state specification. "Trial and error" based controller design 3
10 Dynamic compensation ( pp. 228 ~ 235 ) z D( z) 6.64 T sec (design by emulation) z Direct design using root locus (trial and error) z 0.8 i) D( z) 6 z 0.05 ii) D( z) 3 z 0.88 z 0.5 z 0.8 iii ) D( z) 9 (hidden ocillation) z 0.8 iv ) z 0.88 Dz ( ) 3 (delay) zz ( 0.5) 32
11 Imaginary Axis Root locus for antenna design p /T p /T p /T 0.9 p /T 0.8 p /T 0.8 p /T 0.7 p /T 0.7 p /T 0.6 p /T 0.6 p /T 0.5 p /T 0.5 p /T 0.4 p /T 0.4 p /T p /T p /T 0.2 p /T 0.2 p /T 0. p /T 0. p /T Real Axis z 0.8 Dz ( ) 6 z 0.05 ( p.0, p , p 0.05, z 0.8, z )
12 .4.2 OUTPUT, Y and CONTROL, U/ TIME (SEC) 34
13 Imaginary Axis Root locus for compensated Antenna Design p /T p /T p /T 0.8 p /T 0.7 p /T 0.6 p /T 0.5 p /T 0.4 p /T p /T p /T 0. p /T p /T 0. p /T p /T 0.2 p /T p /T 0.6 p /T 0.5 p /T 0.4 p /T 0.3 p /T Real Axis z 0.88 Dz ( ) 3 z 0.5 ( p.0, p , p 0.5, z 0.88, z )
14 OUTPUT, Y and CONTROL, U/0.5 Step Response of Compensated Antenna TIME (SEC) 36
15 Imaginary Axis 0.76 Root locus for Compensated Antenna Design Real Axis z 0.8 Dz ( ) 9 z 0.8 ( p.0, p , p 0.8, z 0.8, z )
16 OUTPUT, Y and CONTROL, U/0.5 Step response of compensated Antenna Design TIME (SEC) 38
17 Imaginary Axis Root locus for compensated.2 Antenna Design Real Axis z 0.88 Dz ( ) 3 z ( z 0.5) ( p.0, p , p 0.5, p 0, z 0.88, z )
18 OUTPUT, Y and CONTROL, U/0 2 Step response for compensated antenna Design TIME (SEC) 40
19
20
21
22
23 FREQUENCY RESPONSE METHODS. The gain/ phase curve can be easily plotted by hand. 2. The frequency response can be measured experimentally. 3. The dynamic response specification can be easily interpreted in terms of gain/ phase margin. k p 4. The system error constants and can be read directly from the low frequency asymptote of the gain plot. k v 5. The correction to the gain/phase curves can be quickly computed. 6. The effect of pole/ zero gain changes of a compensator can be easily determined. Note :, 5, 6 above are less true for discrete frequency response design using z - transform. 45
24 NYQUIST STABILITY CRITERION Continuous case ns ( ) KD( s) G( s) d( s) Hs ( ) KD( s) G( s) ns ( ) + ns ( ) ds ( ) ds ( ) ns ( ) ns ( ) ds ( ) n( s) d( s) ds ( ) characteristic equation open-loop system known closed-loop system zeros of the closed-loop characteristic equation, n(s) + d(s) = poles of the closed-loop system, n(s)+d(s) 46
25 Z (unknown) = # of unstable zeros (same direction) of + K D(s) G(s) ( or # of unstable poles of H(s) ) P (known) = # of unstable poles (opposite direction) of + K D(s) G(s) ( or # of unstable poles of KD(s)G(s)) N(known after mapping) = # of encirclement (same direction) of the origin of +KD(s)G(s) ( or - of KD(s)G(s) ) 47
26 S-plane +KD(s)G(s)-plane KD(s)G(s)-plane unstable poles 0 - D(s)G(s)-plane Z P =N or Z = P + N -/K 48

27 Nyquist stability criterion

28 9.3 Nyquist stability criterion
29 9.3 Nyquist stability criterion
30 9.3 Nyquist stability criterion
31 9.3 Nyquist stability criterion
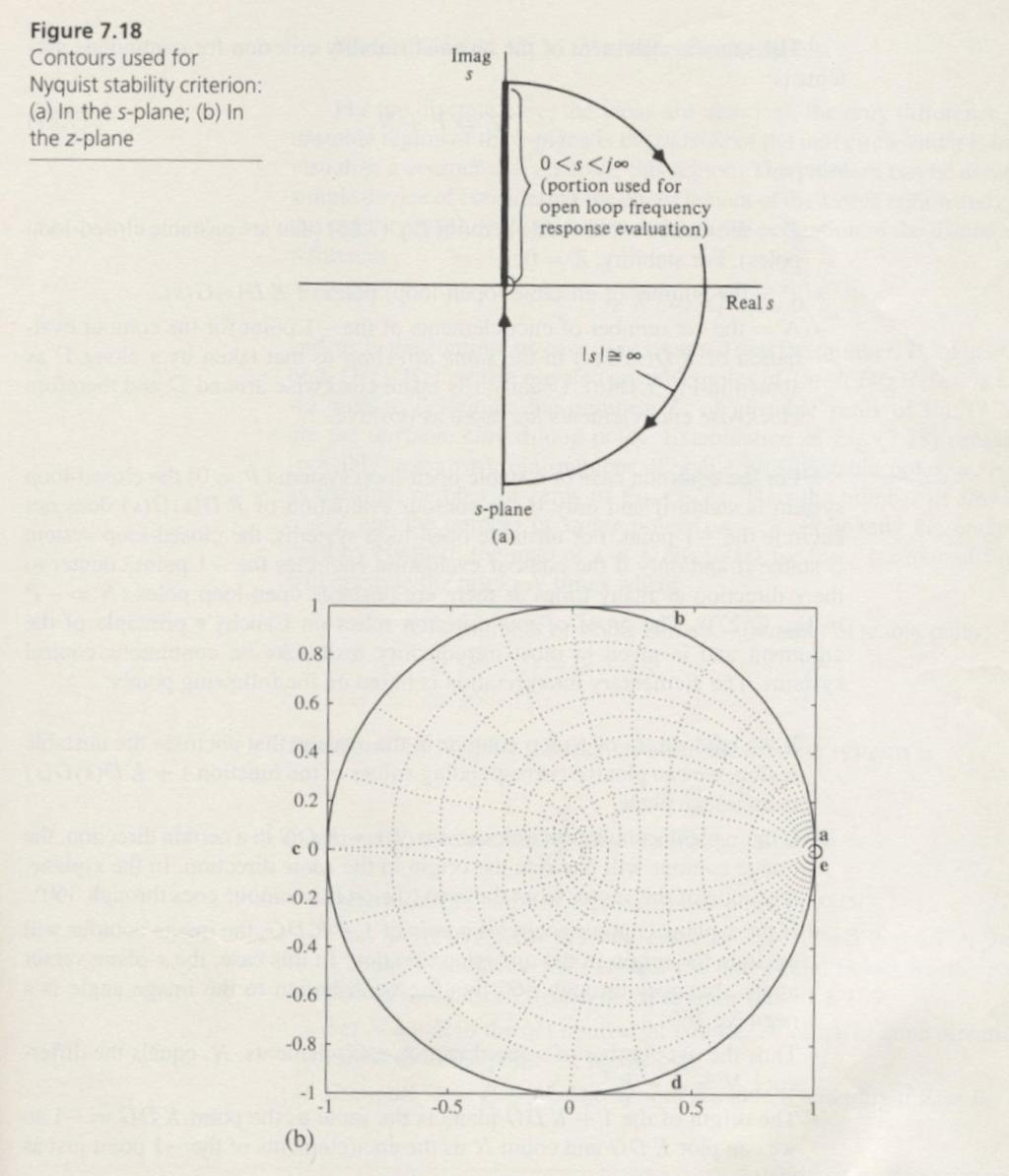
32 Discrete case ( The ideas are identical ) Unstable region of the z-plane is the outside of the unit circle Consider the encirclement of the stable region. N = { # of stable zeros } - { # of stable poles} = { n Z } { n P } = P Z Z = P N In summary,. Determine the number, P, of unstable poles of KDG. jωt 2. Plot KD(z)G(z) for the unit circle, z e and 0ωT 2π. 3. Set N equal to the net number of CCW encirclements of the point - on the plot 4. Compute Z = P N. This system is stable iff Z = 0. 54
33 55
34 ex) p. 24 (Franklin s) The unit feedback discrete system with the plant transfer function with sampling rate ½ Hz and zero-order hold G( s), ZOH at T 2 s ( s).35 ( z 0.523) Gz ( ) ( z) ( z0.35) K P 0, N # of CCW encirclements of the point 0 Z 0 56
35 Imaginary Axis Nyquist plot from Example using contour Real Axis 57
36 DESIGN SPEC. IN THE FREQUENCY DOMAIN Gain Margin (GM) : The factor by which the gain can be increased before the system to go unstable Phase Margin (PM): A measure of how much additional phase ex) p. 243 lag or time delay can be tolerated in the loop before instability results. G( s) with ZOH at T 0.2 sec 2 s ( s) ( ) ( z3.38) ( z0.242) Gz ( ) ( 0.887) 2 z z K 58

37 Bode plot Nyquist plot GM=.8, PM=8 59
38 4. INTRODUCTION An open-loop (direct) system operates without feedback and directly generates the output in response to an input signal. Open loop system with a disturbance input An closed-loop system uses a measurement of the output signal and a comparison with the desired output to generate an error signal that is used by the controller to adjust the actuator. Closed loop system with a disturbance input
39 4.2 ERROR SIGNAL ANALYSIS When H(s) =, Loop gain Sensitivity function Complementary sensitivity function Error minimization S(s), C(s): function of G c (s) and G(s) How? Design compromise
40 SENSITIVITY FUNCTION Tracking error performance Stability robustness stability E( s) R( s) D( s) G( s) E( jω) R( jω) D( jω) G( jω) S( jω) R( jω) sensitivity function Remarks: i) T( jω) Djω ( ) Gjω ( ) Djω ( ) Gjω ( ) complementary sensitivity function ii) T( jω) S( jω) 62
41 VGM Im D( jω) G( jω) plane ( DG) S GM PM - Re VGM : vector gain margin S S min( DG) the distance of the closest point from - VGM S VGM max S S S 63
42 PERFORMANCE E S R eb where eb is an error bound R S e b Define W ( ω) R performance frequency function e b S W W DG S Remark: At every frequency, the point DG W - on the Nyquist plot lies outside the disk of the center -, radius W ( jω). DG 64
43 If the loop gain is large DG S where S DG DG W DG ex) e 0.005, R below 00Hz b 0 ω 2πf 200π R e b = W W ( ω) DG 200 ω The higher the magnitude curve at low frequency, the lower the steady-state errors 65
44 ROBUST STABILITY G( jω) G ( jω)[ w ( ω) ( jω)] 0 2 G( jω) G ( jω) w ( ω) ( jω) 0 2 multiplicative uncertainty additive uncertainty where G ( s) : nominal transfer function w ( ω) : magnitude ( jω) : phase ( jω) w ( ω) W ( ω) upper bound W ( ω) : robust stability frequency function 66
45 ( ) s B ω K Gs s s s B ω ω s ω K s s s B ω ω 2 ( ) s ω w ω s s B ω ω ex) p. 250 small for low frequencies and large for high frequencies
46 0 2 Fig.7.26 Model uncertainty for disk read/write head assembly Fig.7.27 Plot of typical plant uncertainty
47 Define T( jω) S( jω) DG 0 complementary sensitivity function Assume that the nominal system is stable, DG0 0 S DG 0 (for stability robustness) DG [ w ] DG DG 0 ( DG0) w2 0 DG0 ( DG )( Tw ) 0 Suff & Nec. Cond. Tw not to be zero any w W T w T W
48 T DG since DG DG W 2 is small for high frequencies. DG 0 W robust performance 200 Bode plot robust stability W 2 ω 70
49 Remark: WT 2 W DG 2 0 DG 0 ω W DG DG Im - DG 0 W DG 2 0 Re Remark: At every frequency, the critical point, -, lies outside the disk of the center DG, radius W ( jω) Djω ( ) G( jω). 2 7
 ; the other with center DG, radius W ( jω) D( jω) G( jω). 2 Then robust performance holds iff for each ω, these two disks are disjoint.")
50 Robust Performance W Im - DG 0 W DG 2 0 Re Remark: For each frequency ω, construct two closed disks; one with center -, radius radius W ( jω) ; the other with center DG, radius W ( jω) D( jω) G( jω). 2 Then robust performance holds iff for each ω, these two disks are disjoint. 72
51 Bode plot 73
52 Remark: T st z e z 2 T 2 2 z ω T z s s bilinear rule There exists big difference in the Bode diagram at the high frequency. Types of Compensator: phase-lead ( high pass ~ PD) transient response phase-lag ( low pass ~ PI ) steady-state response PID : a special case of a phase lead-lag compensator 74
53 Remark: Transient response PM ς 00 Steady-state response 75 Type 0 system 20 log K at the low-frequency magnitude in Bode log-magnitude plot p Type system K v is the intersection (extension of the initial -20 db/decde) with frequency axis in Bode log-magnitude plot Type 2 system K a is the intersection (extension of the initial -40 db/decde) with frequency axis in Bode log-magnitude plot
54 DESIGN PROCEDURE IN FREQUENCY. 2. Bode plot 3. Gs ( ) hold ν jω G( ν ) Gjω ( ) T ν z 2 bilinear transformation T ν Gz ( ) 2 G( ν) Assuming that the low frequency gain of D( ω) is unity, design D( ω). 2 z ω T z D( ω) Dz ( ) 4. 76
55 ex) p (Ogata's) Gs ( ) Ts e 0 s s0 δ T st e 0 s s 0 Ts ( ) ( z ) G z e 0 0 z z s s 0 s( s 0) z
56 z ( T / 2) v 0.05v ( T / 2) v 0.05v ( v) Gv ( ) 0.05v v 0.05v 0.05v 9.24 v
57 ex) p.236- (Ogata's) e Gs ( ) s Ts K s( s ) Design Specifications: phase margin: 50 velocity error constant sampling period T gain margin: at least 0db K v : 2sec Gz ( ) Ts e K z s s( s ) Kz ( ) ( z )( z 0.887) K(0.0873z ) 2 z.887z
58 z ( T / 2) v 0.v ( T / 2) v 0.v 0.v K ( ) v Gv 0. ( ) 0.v 2 0.v ( ).887( ) v 0.v v v 2 K( )( ) K( v v ) v v vv ( ) How to determine the gain K? 80
59 K lim vg ( v) G( v) K 2 v v 0 Gv ( ) D 2 2( v v ) v v v v 2( )( ) vv ( ) o From Bode plot, PM 30 and GM 4.5dB PM should be properly adjusted. What type of compensator is needed? τv GD ( v), 0 α (phase-lead compensator) ατv 8
60 82
61 Review ( p.628 ιn Νιse's): τv GD ( v) ατv φ tan τν tan ατν dφ τ ατ 2 dν ( τν) ( ατν) v φ G max ma D G D 2 τv ( τ and break frequencies from GD ( v) ) () τ α ατv α α x tan sin ( α from the required phase) (2) 2 α α j jτωmax α ( jωmax ) jατω j α ( jω max ) where G ( jω ) G( jω ) at ω. D α max max (magnitude at the peak of phase curve) (3) max Solving (2), we can obtain α. Using max (3) and (), we can determine τ. 83
62 How to design G ( v)? D φ G max D tan sin ( jω ) max α α α 2 α α α 20 log db α 0.36 o sin 28 α 0.36 At v.7, G( jω ) db v max max max.7 τ τ α τ α G D τv v ( v) GD ( v). ατv v 84
63 85
64 G G D D v ( v) v z (0 ) ( z) z z (0 ) z z.9387 z make it a difference equation! G D ( z) G( z) z ( z0.9356) z ( z )( z 0.887) z 0.008z z 2.377z.8352z C( z) 0.089z 0.008z Rz ( ) z z.8460z ( z0.9357)( z0.845) ( z 0.826)( z j0.396)( z j0.396) 86
65 87
66 HOMEWORK 4 (DUE DATE: MAY 7TH) B-4- B-4-3 B-4-5 B-4-6 B-4-8 B-4-9 B-4-3 B-4-4
Digital Control Systems
 Digital Control Systems Lecture Summary #4 This summary discussed some graphical methods their use to determine the stability the stability margins of closed loop systems. A. Nyquist criterion Nyquist
Digital Control Systems Lecture Summary #4 This summary discussed some graphical methods their use to determine the stability the stability margins of closed loop systems. A. Nyquist criterion Nyquist
6.1 Sketch the z-domain root locus and find the critical gain for the following systems K., the closed-loop characteristic equation is K + z 0.
 6. Sketch the z-domain root locus and find the critical gain for the following systems K (i) Gz () z 4. (ii) Gz K () ( z+ 9. )( z 9. ) (iii) Gz () Kz ( z. )( z ) (iv) Gz () Kz ( + 9. ) ( z. )( z 8. ) (i)
6. Sketch the z-domain root locus and find the critical gain for the following systems K (i) Gz () z 4. (ii) Gz K () ( z+ 9. )( z 9. ) (iii) Gz () Kz ( z. )( z ) (iv) Gz () Kz ( + 9. ) ( z. )( z 8. ) (i)
MAS107 Control Theory Exam Solutions 2008
 MAS07 CONTROL THEORY. HOVLAND: EXAM SOLUTION 2008 MAS07 Control Theory Exam Solutions 2008 Geir Hovland, Mechatronics Group, Grimstad, Norway June 30, 2008 C. Repeat question B, but plot the phase curve
MAS07 CONTROL THEORY. HOVLAND: EXAM SOLUTION 2008 MAS07 Control Theory Exam Solutions 2008 Geir Hovland, Mechatronics Group, Grimstad, Norway June 30, 2008 C. Repeat question B, but plot the phase curve
FREQUENCY-RESPONSE DESIGN
 ECE45/55: Feedback Control Systems. 9 FREQUENCY-RESPONSE DESIGN 9.: PD and lead compensation networks The frequency-response methods we have seen so far largely tell us about stability and stability margins
ECE45/55: Feedback Control Systems. 9 FREQUENCY-RESPONSE DESIGN 9.: PD and lead compensation networks The frequency-response methods we have seen so far largely tell us about stability and stability margins
Homework 7 - Solutions
 Homework 7 - Solutions Note: This homework is worth a total of 48 points. 1. Compensators (9 points) For a unity feedback system given below, with G(s) = K s(s + 5)(s + 11) do the following: (c) Find the
Homework 7 - Solutions Note: This homework is worth a total of 48 points. 1. Compensators (9 points) For a unity feedback system given below, with G(s) = K s(s + 5)(s + 11) do the following: (c) Find the
H(s) = s. a 2. H eq (z) = z z. G(s) a 2. G(s) A B. s 2 s(s + a) 2 s(s a) G(s) 1 a 1 a. } = (z s 1)( z. e ) ) (z. (z 1)(z e at )(z e at )
 = s. a 2. H eq (z) = z z. G(s) a 2. G(s) A B. s 2 s(s + a) 2 s(s a) G(s) 1 a 1 a. } = (z s 1)( z. e ) ) (z. (z 1)(z e at )(z e at )") .7 Quiz Solutions Problem : a H(s) = s a a) Calculate the zero order hold equivalent H eq (z). H eq (z) = z z G(s) Z{ } s G(s) a Z{ } = Z{ s s(s a ) } G(s) A B Z{ } = Z{ + } s s(s + a) s(s a) G(s) a a
.7 Quiz Solutions Problem : a H(s) = s a a) Calculate the zero order hold equivalent H eq (z). H eq (z) = z z G(s) Z{ } s G(s) a Z{ } = Z{ s s(s a ) } G(s) A B Z{ } = Z{ + } s s(s + a) s(s a) G(s) a a
STABILITY ANALYSIS TECHNIQUES
 ECE4540/5540: Digital Control Systems 4 1 STABILITY ANALYSIS TECHNIQUES 41: Bilinear transformation Three main aspects to control-system design: 1 Stability, 2 Steady-state response, 3 Transient response
ECE4540/5540: Digital Control Systems 4 1 STABILITY ANALYSIS TECHNIQUES 41: Bilinear transformation Three main aspects to control-system design: 1 Stability, 2 Steady-state response, 3 Transient response
Frequency methods for the analysis of feedback systems. Lecture 6. Loop analysis of feedback systems. Nyquist approach to study stability
 Lecture 6. Loop analysis of feedback systems 1. Motivation 2. Graphical representation of frequency response: Bode and Nyquist curves 3. Nyquist stability theorem 4. Stability margins Frequency methods
Lecture 6. Loop analysis of feedback systems 1. Motivation 2. Graphical representation of frequency response: Bode and Nyquist curves 3. Nyquist stability theorem 4. Stability margins Frequency methods
Transient response via gain adjustment. Consider a unity feedback system, where G(s) = 2. The closed loop transfer function is. s 2 + 2ζωs + ω 2 n
 = 2. The closed loop transfer function is. s 2 + 2ζωs + ω 2 n") Design via frequency response Transient response via gain adjustment Consider a unity feedback system, where G(s) = ωn 2. The closed loop transfer function is s(s+2ζω n ) T(s) = ω 2 n s 2 + 2ζωs + ω 2
Design via frequency response Transient response via gain adjustment Consider a unity feedback system, where G(s) = ωn 2. The closed loop transfer function is s(s+2ζω n ) T(s) = ω 2 n s 2 + 2ζωs + ω 2
Frequency Response Techniques
 4th Edition T E N Frequency Response Techniques SOLUTION TO CASE STUDY CHALLENGE Antenna Control: Stability Design and Transient Performance First find the forward transfer function, G(s). Pot: K 1 = 10
4th Edition T E N Frequency Response Techniques SOLUTION TO CASE STUDY CHALLENGE Antenna Control: Stability Design and Transient Performance First find the forward transfer function, G(s). Pot: K 1 = 10
ROOT LOCUS. Consider the system. Root locus presents the poles of the closed-loop system when the gain K changes from 0 to. H(s) H ( s) = ( s)
 H ( s) = ( s)") C1 ROOT LOCUS Consider the system R(s) E(s) C(s) + K G(s) - H(s) C(s) R(s) = K G(s) 1 + K G(s) H(s) Root locus presents the poles of the closed-loop system when the gain K changes from 0 to 1+ K G ( s)
C1 ROOT LOCUS Consider the system R(s) E(s) C(s) + K G(s) - H(s) C(s) R(s) = K G(s) 1 + K G(s) H(s) Root locus presents the poles of the closed-loop system when the gain K changes from 0 to 1+ K G ( s)
ECE 486 Control Systems
 ECE 486 Control Systems Spring 208 Midterm #2 Information Issued: April 5, 208 Updated: April 8, 208 ˆ This document is an info sheet about the second exam of ECE 486, Spring 208. ˆ Please read the following
ECE 486 Control Systems Spring 208 Midterm #2 Information Issued: April 5, 208 Updated: April 8, 208 ˆ This document is an info sheet about the second exam of ECE 486, Spring 208. ˆ Please read the following
Systems Analysis and Control
 Systems Analysis and Control Matthew M. Peet Illinois Institute of Technology Lecture 23: Drawing The Nyquist Plot Overview In this Lecture, you will learn: Review of Nyquist Drawing the Nyquist Plot Using
Systems Analysis and Control Matthew M. Peet Illinois Institute of Technology Lecture 23: Drawing The Nyquist Plot Overview In this Lecture, you will learn: Review of Nyquist Drawing the Nyquist Plot Using
Outline. Classical Control. Lecture 5
 Outline Outline Outline 1 What is 2 Outline What is Why use? Sketching a 1 What is Why use? Sketching a 2 Gain Controller Lead Compensation Lag Compensation What is Properties of a General System Why use?
Outline Outline Outline 1 What is 2 Outline What is Why use? Sketching a 1 What is Why use? Sketching a 2 Gain Controller Lead Compensation Lag Compensation What is Properties of a General System Why use?
Systems Analysis and Control
 Systems Analysis and Control Matthew M. Peet Arizona State University Lecture 21: Stability Margins and Closing the Loop Overview In this Lecture, you will learn: Closing the Loop Effect on Bode Plot Effect
Systems Analysis and Control Matthew M. Peet Arizona State University Lecture 21: Stability Margins and Closing the Loop Overview In this Lecture, you will learn: Closing the Loop Effect on Bode Plot Effect
INTRODUCTION TO DIGITAL CONTROL
 ECE4540/5540: Digital Control Systems INTRODUCTION TO DIGITAL CONTROL.: Introduction In ECE450/ECE550 Feedback Control Systems, welearnedhow to make an analog controller D(s) to control a linear-time-invariant
ECE4540/5540: Digital Control Systems INTRODUCTION TO DIGITAL CONTROL.: Introduction In ECE450/ECE550 Feedback Control Systems, welearnedhow to make an analog controller D(s) to control a linear-time-invariant
EE C128 / ME C134 Fall 2014 HW 8 - Solutions. HW 8 - Solutions
 EE C28 / ME C34 Fall 24 HW 8 - Solutions HW 8 - Solutions. Transient Response Design via Gain Adjustment For a transfer function G(s) = in negative feedback, find the gain to yield a 5% s(s+2)(s+85) overshoot
EE C28 / ME C34 Fall 24 HW 8 - Solutions HW 8 - Solutions. Transient Response Design via Gain Adjustment For a transfer function G(s) = in negative feedback, find the gain to yield a 5% s(s+2)(s+85) overshoot
Chapter 2. Classical Control System Design. Dutch Institute of Systems and Control
 Chapter 2 Classical Control System Design Overview Ch. 2. 2. Classical control system design Introduction Introduction Steady-state Steady-state errors errors Type Type k k systems systems Integral Integral
Chapter 2 Classical Control System Design Overview Ch. 2. 2. Classical control system design Introduction Introduction Steady-state Steady-state errors errors Type Type k k systems systems Integral Integral
Automatic Control 2. Loop shaping. Prof. Alberto Bemporad. University of Trento. Academic year
 Automatic Control 2 Loop shaping Prof. Alberto Bemporad University of Trento Academic year 21-211 Prof. Alberto Bemporad (University of Trento) Automatic Control 2 Academic year 21-211 1 / 39 Feedback
Automatic Control 2 Loop shaping Prof. Alberto Bemporad University of Trento Academic year 21-211 Prof. Alberto Bemporad (University of Trento) Automatic Control 2 Academic year 21-211 1 / 39 Feedback
Lecture 6 Classical Control Overview IV. Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore
 Lecture 6 Classical Control Overview IV Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore Lead Lag Compensator Design Dr. Radhakant Padhi Asst.
Lecture 6 Classical Control Overview IV Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore Lead Lag Compensator Design Dr. Radhakant Padhi Asst.
Discrete Systems. Step response and pole locations. Mark Cannon. Hilary Term Lecture
 Discrete Systems Mark Cannon Hilary Term 22 - Lecture 4 Step response and pole locations 4 - Review Definition of -transform: U() = Z{u k } = u k k k= Discrete transfer function: Y () U() = G() = Z{g k},
Discrete Systems Mark Cannon Hilary Term 22 - Lecture 4 Step response and pole locations 4 - Review Definition of -transform: U() = Z{u k } = u k k k= Discrete transfer function: Y () U() = G() = Z{g k},
Raktim Bhattacharya. . AERO 422: Active Controls for Aerospace Vehicles. Frequency Response-Design Method
 .. AERO 422: Active Controls for Aerospace Vehicles Frequency Response- Method Raktim Bhattacharya Laboratory For Uncertainty Quantification Aerospace Engineering, Texas A&M University. ... Response to
.. AERO 422: Active Controls for Aerospace Vehicles Frequency Response- Method Raktim Bhattacharya Laboratory For Uncertainty Quantification Aerospace Engineering, Texas A&M University. ... Response to
(b) A unity feedback system is characterized by the transfer function. Design a suitable compensator to meet the following specifications:
 A unity feedback system is characterized by the transfer function. Design a suitable compensator to meet the following specifications:") 1. (a) The open loop transfer function of a unity feedback control system is given by G(S) = K/S(1+0.1S)(1+S) (i) Determine the value of K so that the resonance peak M r of the system is equal to 1.4.
1. (a) The open loop transfer function of a unity feedback control system is given by G(S) = K/S(1+0.1S)(1+S) (i) Determine the value of K so that the resonance peak M r of the system is equal to 1.4.
1 (20 pts) Nyquist Exercise
 Nyquist Exercise") EE C128 / ME134 Problem Set 6 Solution Fall 2011 1 (20 pts) Nyquist Exercise Consider a close loop system with unity feedback. For each G(s), hand sketch the Nyquist diagram, determine Z = P N, algebraically
EE C128 / ME134 Problem Set 6 Solution Fall 2011 1 (20 pts) Nyquist Exercise Consider a close loop system with unity feedback. For each G(s), hand sketch the Nyquist diagram, determine Z = P N, algebraically
DIGITAL CONTROLLER DESIGN
 ECE4540/5540: Digital Control Systems 5 DIGITAL CONTROLLER DESIGN 5.: Direct digital design: Steady-state accuracy We have spent quite a bit of time discussing digital hybrid system analysis, and some
ECE4540/5540: Digital Control Systems 5 DIGITAL CONTROLLER DESIGN 5.: Direct digital design: Steady-state accuracy We have spent quite a bit of time discussing digital hybrid system analysis, and some
Plan of the Lecture. Goal: wrap up lead and lag control; start looking at frequency response as an alternative methodology for control systems design.
 Plan of the Lecture Review: design using Root Locus; dynamic compensation; PD and lead control Today s topic: PI and lag control; introduction to frequency-response design method Goal: wrap up lead and
Plan of the Lecture Review: design using Root Locus; dynamic compensation; PD and lead control Today s topic: PI and lag control; introduction to frequency-response design method Goal: wrap up lead and
Root Locus Design Example #4
 Root Locus Design Example #4 A. Introduction The plant model represents a linearization of the heading dynamics of a 25, ton tanker ship under empty load conditions. The reference input signal R(s) is
Root Locus Design Example #4 A. Introduction The plant model represents a linearization of the heading dynamics of a 25, ton tanker ship under empty load conditions. The reference input signal R(s) is
KINGS COLLEGE OF ENGINEERING DEPARTMENT OF ELECTRONICS AND COMMUNICATION ENGINEERING
 KINGS COLLEGE OF ENGINEERING DEPARTMENT OF ELECTRONICS AND COMMUNICATION ENGINEERING QUESTION BANK SUB.NAME : CONTROL SYSTEMS BRANCH : ECE YEAR : II SEMESTER: IV 1. What is control system? 2. Define open
KINGS COLLEGE OF ENGINEERING DEPARTMENT OF ELECTRONICS AND COMMUNICATION ENGINEERING QUESTION BANK SUB.NAME : CONTROL SYSTEMS BRANCH : ECE YEAR : II SEMESTER: IV 1. What is control system? 2. Define open
1 (s + 3)(s + 2)(s + a) G(s) = C(s) = K P + K I
(s + 2)(s + a) G(s) = C(s) = K P + K I") MAE 43B Linear Control Prof. M. Krstic FINAL June 9, Problem. ( points) Consider a plant in feedback with the PI controller G(s) = (s + 3)(s + )(s + a) C(s) = K P + K I s. (a) (4 points) For a given constant
MAE 43B Linear Control Prof. M. Krstic FINAL June 9, Problem. ( points) Consider a plant in feedback with the PI controller G(s) = (s + 3)(s + )(s + a) C(s) = K P + K I s. (a) (4 points) For a given constant
EECS C128/ ME C134 Final Thu. May 14, pm. Closed book. One page, 2 sides of formula sheets. No calculators.
 Name: SID: EECS C28/ ME C34 Final Thu. May 4, 25 5-8 pm Closed book. One page, 2 sides of formula sheets. No calculators. There are 8 problems worth points total. Problem Points Score 4 2 4 3 6 4 8 5 3
Name: SID: EECS C28/ ME C34 Final Thu. May 4, 25 5-8 pm Closed book. One page, 2 sides of formula sheets. No calculators. There are 8 problems worth points total. Problem Points Score 4 2 4 3 6 4 8 5 3
Course Outline. Closed Loop Stability. Stability. Amme 3500 : System Dynamics & Control. Nyquist Stability. Dr. Dunant Halim
 Amme 3 : System Dynamics & Control Nyquist Stability Dr. Dunant Halim Course Outline Week Date Content Assignment Notes 1 5 Mar Introduction 2 12 Mar Frequency Domain Modelling 3 19 Mar System Response
Amme 3 : System Dynamics & Control Nyquist Stability Dr. Dunant Halim Course Outline Week Date Content Assignment Notes 1 5 Mar Introduction 2 12 Mar Frequency Domain Modelling 3 19 Mar System Response
Systems Analysis and Control
 Systems Analysis and Control Matthew M. Peet Illinois Institute of Technology Lecture 22: The Nyquist Criterion Overview In this Lecture, you will learn: Complex Analysis The Argument Principle The Contour
Systems Analysis and Control Matthew M. Peet Illinois Institute of Technology Lecture 22: The Nyquist Criterion Overview In this Lecture, you will learn: Complex Analysis The Argument Principle The Contour
ECSE 4962 Control Systems Design. A Brief Tutorial on Control Design
 ECSE 4962 Control Systems Design A Brief Tutorial on Control Design Instructor: Professor John T. Wen TA: Ben Potsaid http://www.cat.rpi.edu/~wen/ecse4962s04/ Don t Wait Until The Last Minute! You got
ECSE 4962 Control Systems Design A Brief Tutorial on Control Design Instructor: Professor John T. Wen TA: Ben Potsaid http://www.cat.rpi.edu/~wen/ecse4962s04/ Don t Wait Until The Last Minute! You got
Systems Analysis and Control
 Systems Analysis and Control Matthew M. Peet Arizona State University Lecture 23: Drawing The Nyquist Plot Overview In this Lecture, you will learn: Review of Nyquist Drawing the Nyquist Plot Using the
Systems Analysis and Control Matthew M. Peet Arizona State University Lecture 23: Drawing The Nyquist Plot Overview In this Lecture, you will learn: Review of Nyquist Drawing the Nyquist Plot Using the
Control Systems I Lecture 10: System Specifications
 Control Systems I Lecture 10: System Specifications Readings: Guzzella, Chapter 10 Emilio Frazzoli Institute for Dynamic Systems and Control D-MAVT ETH Zürich November 24, 2017 E. Frazzoli (ETH) Lecture
Control Systems I Lecture 10: System Specifications Readings: Guzzella, Chapter 10 Emilio Frazzoli Institute for Dynamic Systems and Control D-MAVT ETH Zürich November 24, 2017 E. Frazzoli (ETH) Lecture
Robust Performance Example #1
 Robust Performance Example # The transfer function for a nominal system (plant) is given, along with the transfer function for one extreme system. These two transfer functions define a family of plants
Robust Performance Example # The transfer function for a nominal system (plant) is given, along with the transfer function for one extreme system. These two transfer functions define a family of plants
r + - FINAL June 12, 2012 MAE 143B Linear Control Prof. M. Krstic
 MAE 43B Linear Control Prof. M. Krstic FINAL June, One sheet of hand-written notes (two pages). Present your reasoning and calculations clearly. Inconsistent etchings will not be graded. Write answers
MAE 43B Linear Control Prof. M. Krstic FINAL June, One sheet of hand-written notes (two pages). Present your reasoning and calculations clearly. Inconsistent etchings will not be graded. Write answers
MAE 143B - Homework 9
 MAE 43B - Homework 9 7.2 2 2 3.8.6.4.2.2 9 8 2 2 3 a) G(s) = (s+)(s+).4.6.8.2.2.4.6.8. Polar plot; red for negative ; no encirclements of, a.s. under unit feedback... 2 2 3. 4 9 2 2 3 h) G(s) = s+ s(s+)..2.4.6.8.2.4
MAE 43B - Homework 9 7.2 2 2 3.8.6.4.2.2 9 8 2 2 3 a) G(s) = (s+)(s+).4.6.8.2.2.4.6.8. Polar plot; red for negative ; no encirclements of, a.s. under unit feedback... 2 2 3. 4 9 2 2 3 h) G(s) = s+ s(s+)..2.4.6.8.2.4
Control Systems I. Lecture 9: The Nyquist condition
 Control Systems I Lecture 9: The Nyquist condition adings: Guzzella, Chapter 9.4 6 Åstrom and Murray, Chapter 9.1 4 www.cds.caltech.edu/~murray/amwiki/index.php/first_edition Emilio Frazzoli Institute
Control Systems I Lecture 9: The Nyquist condition adings: Guzzella, Chapter 9.4 6 Åstrom and Murray, Chapter 9.1 4 www.cds.caltech.edu/~murray/amwiki/index.php/first_edition Emilio Frazzoli Institute
Systems Analysis and Control
 Systems Analysis and Control Matthew M. Peet Arizona State University Lecture 24: Compensation in the Frequency Domain Overview In this Lecture, you will learn: Lead Compensators Performance Specs Altering
Systems Analysis and Control Matthew M. Peet Arizona State University Lecture 24: Compensation in the Frequency Domain Overview In this Lecture, you will learn: Lead Compensators Performance Specs Altering
ELECTRONICS & COMMUNICATIONS DEP. 3rd YEAR, 2010/2011 CONTROL ENGINEERING SHEET 5 Lead-Lag Compensation Techniques
 CAIRO UNIVERSITY FACULTY OF ENGINEERING ELECTRONICS & COMMUNICATIONS DEP. 3rd YEAR, 00/0 CONTROL ENGINEERING SHEET 5 Lead-Lag Compensation Techniques [] For the following system, Design a compensator such
CAIRO UNIVERSITY FACULTY OF ENGINEERING ELECTRONICS & COMMUNICATIONS DEP. 3rd YEAR, 00/0 CONTROL ENGINEERING SHEET 5 Lead-Lag Compensation Techniques [] For the following system, Design a compensator such
Today (10/23/01) Today. Reading Assignment: 6.3. Gain/phase margin lead/lag compensator Ref. 6.4, 6.7, 6.10
 Today. Reading Assignment: 6.3. Gain/phase margin lead/lag compensator Ref. 6.4, 6.7, 6.10") Today Today (10/23/01) Gain/phase margin lead/lag compensator Ref. 6.4, 6.7, 6.10 Reading Assignment: 6.3 Last Time In the last lecture, we discussed control design through shaping of the loop gain GK:
Today Today (10/23/01) Gain/phase margin lead/lag compensator Ref. 6.4, 6.7, 6.10 Reading Assignment: 6.3 Last Time In the last lecture, we discussed control design through shaping of the loop gain GK:
Controls Problems for Qualifying Exam - Spring 2014
 Controls Problems for Qualifying Exam - Spring 2014 Problem 1 Consider the system block diagram given in Figure 1. Find the overall transfer function T(s) = C(s)/R(s). Note that this transfer function
Controls Problems for Qualifying Exam - Spring 2014 Problem 1 Consider the system block diagram given in Figure 1. Find the overall transfer function T(s) = C(s)/R(s). Note that this transfer function
Control System Design
 ELEC ENG 4CL4: Control System Design Notes for Lecture #11 Wednesday, January 28, 2004 Dr. Ian C. Bruce Room: CRL-229 Phone ext.: 26984 Email: ibruce@mail.ece.mcmaster.ca Relative Stability: Stability
ELEC ENG 4CL4: Control System Design Notes for Lecture #11 Wednesday, January 28, 2004 Dr. Ian C. Bruce Room: CRL-229 Phone ext.: 26984 Email: ibruce@mail.ece.mcmaster.ca Relative Stability: Stability
Linear Control Systems Lecture #3 - Frequency Domain Analysis. Guillaume Drion Academic year
 Linear Control Systems Lecture #3 - Frequency Domain Analysis Guillaume Drion Academic year 2018-2019 1 Goal and Outline Goal: To be able to analyze the stability and robustness of a closed-loop system
Linear Control Systems Lecture #3 - Frequency Domain Analysis Guillaume Drion Academic year 2018-2019 1 Goal and Outline Goal: To be able to analyze the stability and robustness of a closed-loop system
Outline. Classical Control. Lecture 1
 Outline Outline Outline 1 Introduction 2 Prerequisites Block diagram for system modeling Modeling Mechanical Electrical Outline Introduction Background Basic Systems Models/Transfers functions 1 Introduction
Outline Outline Outline 1 Introduction 2 Prerequisites Block diagram for system modeling Modeling Mechanical Electrical Outline Introduction Background Basic Systems Models/Transfers functions 1 Introduction
Essence of the Root Locus Technique
 Essence of the Root Locus Technique In this chapter we study a method for finding locations of system poles. The method is presented for a very general set-up, namely for the case when the closed-loop
Essence of the Root Locus Technique In this chapter we study a method for finding locations of system poles. The method is presented for a very general set-up, namely for the case when the closed-loop
Distributed Real-Time Control Systems
 Distributed Real-Time Control Systems Chapter 9 Discrete PID Control 1 Computer Control 2 Approximation of Continuous Time Controllers Design Strategy: Design a continuous time controller C c (s) and then
Distributed Real-Time Control Systems Chapter 9 Discrete PID Control 1 Computer Control 2 Approximation of Continuous Time Controllers Design Strategy: Design a continuous time controller C c (s) and then
IC6501 CONTROL SYSTEMS
 DHANALAKSHMI COLLEGE OF ENGINEERING CHENNAI DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING YEAR/SEMESTER: II/IV IC6501 CONTROL SYSTEMS UNIT I SYSTEMS AND THEIR REPRESENTATION 1. What is the mathematical
DHANALAKSHMI COLLEGE OF ENGINEERING CHENNAI DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING YEAR/SEMESTER: II/IV IC6501 CONTROL SYSTEMS UNIT I SYSTEMS AND THEIR REPRESENTATION 1. What is the mathematical
MEM 355 Performance Enhancement of Dynamical Systems
 MEM 355 Performance Enhancement of Dynamical Systems Frequency Domain Design Harry G. Kwatny Department of Mechanical Engineering & Mechanics Drexel University 5/8/25 Outline Closed Loop Transfer Functions
MEM 355 Performance Enhancement of Dynamical Systems Frequency Domain Design Harry G. Kwatny Department of Mechanical Engineering & Mechanics Drexel University 5/8/25 Outline Closed Loop Transfer Functions
Introduction. Performance and Robustness (Chapter 1) Advanced Control Systems Spring / 31
 Advanced Control Systems Spring / 31") Introduction Classical Control Robust Control u(t) y(t) G u(t) G + y(t) G : nominal model G = G + : plant uncertainty Uncertainty sources : Structured : parametric uncertainty, multimodel uncertainty Unstructured
Introduction Classical Control Robust Control u(t) y(t) G u(t) G + y(t) G : nominal model G = G + : plant uncertainty Uncertainty sources : Structured : parametric uncertainty, multimodel uncertainty Unstructured
EE402 - Discrete Time Systems Spring Lecture 10
 EE402 - Discrete Time Systems Spring 208 Lecturer: Asst. Prof. M. Mert Ankarali Lecture 0.. Root Locus For continuous time systems the root locus diagram illustrates the location of roots/poles of a closed
EE402 - Discrete Time Systems Spring 208 Lecturer: Asst. Prof. M. Mert Ankarali Lecture 0.. Root Locus For continuous time systems the root locus diagram illustrates the location of roots/poles of a closed
Lecture 5 Classical Control Overview III. Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore
 Lecture 5 Classical Control Overview III Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore A Fundamental Problem in Control Systems Poles of open
Lecture 5 Classical Control Overview III Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore A Fundamental Problem in Control Systems Poles of open
Lecture 11. Frequency Response in Discrete Time Control Systems
 EE42 - Discrete Time Systems Spring 28 Lecturer: Asst. Prof. M. Mert Ankarali Lecture.. Frequency Response in Discrete Time Control Systems Let s assume u[k], y[k], and G(z) represents the input, output,
EE42 - Discrete Time Systems Spring 28 Lecturer: Asst. Prof. M. Mert Ankarali Lecture.. Frequency Response in Discrete Time Control Systems Let s assume u[k], y[k], and G(z) represents the input, output,
Classify a transfer function to see which order or ramp it can follow and with which expected error.
 Dr. J. Tani, Prof. Dr. E. Frazzoli 5-059-00 Control Systems I (Autumn 208) Exercise Set 0 Topic: Specifications for Feedback Systems Discussion: 30.. 208 Learning objectives: The student can grizzi@ethz.ch,
Dr. J. Tani, Prof. Dr. E. Frazzoli 5-059-00 Control Systems I (Autumn 208) Exercise Set 0 Topic: Specifications for Feedback Systems Discussion: 30.. 208 Learning objectives: The student can grizzi@ethz.ch,
Dr Ian R. Manchester
 Week Content Notes 1 Introduction 2 Frequency Domain Modelling 3 Transient Performance and the s-plane 4 Block Diagrams 5 Feedback System Characteristics Assign 1 Due 6 Root Locus 7 Root Locus 2 Assign
Week Content Notes 1 Introduction 2 Frequency Domain Modelling 3 Transient Performance and the s-plane 4 Block Diagrams 5 Feedback System Characteristics Assign 1 Due 6 Root Locus 7 Root Locus 2 Assign
Frequency domain analysis
 Automatic Control 2 Frequency domain analysis Prof. Alberto Bemporad University of Trento Academic year 2010-2011 Prof. Alberto Bemporad (University of Trento) Automatic Control 2 Academic year 2010-2011
Automatic Control 2 Frequency domain analysis Prof. Alberto Bemporad University of Trento Academic year 2010-2011 Prof. Alberto Bemporad (University of Trento) Automatic Control 2 Academic year 2010-2011
Exercises for lectures 13 Design using frequency methods
 Exercises for lectures 13 Design using frequency methods Michael Šebek Automatic control 2016 31-3-17 Setting of the closed loop bandwidth At the transition frequency in the open loop is (from definition)
Exercises for lectures 13 Design using frequency methods Michael Šebek Automatic control 2016 31-3-17 Setting of the closed loop bandwidth At the transition frequency in the open loop is (from definition)
Nyquist Criterion For Stability of Closed Loop System
 Nyquist Criterion For Stability of Closed Loop System Prof. N. Puri ECE Department, Rutgers University Nyquist Theorem Given a closed loop system: r(t) + KG(s) = K N(s) c(t) H(s) = KG(s) +KG(s) = KN(s)
Nyquist Criterion For Stability of Closed Loop System Prof. N. Puri ECE Department, Rutgers University Nyquist Theorem Given a closed loop system: r(t) + KG(s) = K N(s) c(t) H(s) = KG(s) +KG(s) = KN(s)
The Nyquist criterion relates the stability of a closed system to the open-loop frequency response and open loop pole location.
 Introduction to the Nyquist criterion The Nyquist criterion relates the stability of a closed system to the open-loop frequency response and open loop pole location. Mapping. If we take a complex number
Introduction to the Nyquist criterion The Nyquist criterion relates the stability of a closed system to the open-loop frequency response and open loop pole location. Mapping. If we take a complex number
Robust Control 3 The Closed Loop
 Robust Control 3 The Closed Loop Harry G. Kwatny Department of Mechanical Engineering & Mechanics Drexel University /2/2002 Outline Closed Loop Transfer Functions Traditional Performance Measures Time
Robust Control 3 The Closed Loop Harry G. Kwatny Department of Mechanical Engineering & Mechanics Drexel University /2/2002 Outline Closed Loop Transfer Functions Traditional Performance Measures Time
VALLIAMMAI ENGINEERING COLLEGE SRM Nagar, Kattankulathur
 VALLIAMMAI ENGINEERING COLLEGE SRM Nagar, Kattankulathur 603 203. DEPARTMENT OF ELECTRONICS & COMMUNICATION ENGINEERING SUBJECT QUESTION BANK : EC6405 CONTROL SYSTEM ENGINEERING SEM / YEAR: IV / II year
VALLIAMMAI ENGINEERING COLLEGE SRM Nagar, Kattankulathur 603 203. DEPARTMENT OF ELECTRONICS & COMMUNICATION ENGINEERING SUBJECT QUESTION BANK : EC6405 CONTROL SYSTEM ENGINEERING SEM / YEAR: IV / II year
Dr Ian R. Manchester Dr Ian R. Manchester AMME 3500 : Review
 Week Date Content Notes 1 6 Mar Introduction 2 13 Mar Frequency Domain Modelling 3 20 Mar Transient Performance and the s-plane 4 27 Mar Block Diagrams Assign 1 Due 5 3 Apr Feedback System Characteristics
Week Date Content Notes 1 6 Mar Introduction 2 13 Mar Frequency Domain Modelling 3 20 Mar Transient Performance and the s-plane 4 27 Mar Block Diagrams Assign 1 Due 5 3 Apr Feedback System Characteristics
Chapter 7. Digital Control Systems
 Chapter 7 Digital Control Systems 1 1 Introduction In this chapter, we introduce analysis and design of stability, steady-state error, and transient response for computer-controlled systems. Transfer functions,
Chapter 7 Digital Control Systems 1 1 Introduction In this chapter, we introduce analysis and design of stability, steady-state error, and transient response for computer-controlled systems. Transfer functions,
Stability of CL System
 Stability of CL System Consider an open loop stable system that becomes unstable with large gain: At the point of instability, K( j) G( j) = 1 0dB K( j) G( j) K( j) G( j) K( j) G( j) =± 180 o 180 o Closed
Stability of CL System Consider an open loop stable system that becomes unstable with large gain: At the point of instability, K( j) G( j) = 1 0dB K( j) G( j) K( j) G( j) K( j) G( j) =± 180 o 180 o Closed
CHAPTER 7 STEADY-STATE RESPONSE ANALYSES
 CHAPTER 7 STEADY-STATE RESPONSE ANALYSES 1. Introduction The steady state error is a measure of system accuracy. These errors arise from the nature of the inputs, system type and from nonlinearities of
CHAPTER 7 STEADY-STATE RESPONSE ANALYSES 1. Introduction The steady state error is a measure of system accuracy. These errors arise from the nature of the inputs, system type and from nonlinearities of
Analysis of SISO Control Loops
 Chapter 5 Analysis of SISO Control Loops Topics to be covered For a given controller and plant connected in feedback we ask and answer the following questions: Is the loop stable? What are the sensitivities
Chapter 5 Analysis of SISO Control Loops Topics to be covered For a given controller and plant connected in feedback we ask and answer the following questions: Is the loop stable? What are the sensitivities
CDS 101/110a: Lecture 8-1 Frequency Domain Design
 CDS 11/11a: Lecture 8-1 Frequency Domain Design Richard M. Murray 17 November 28 Goals: Describe canonical control design problem and standard performance measures Show how to use loop shaping to achieve
CDS 11/11a: Lecture 8-1 Frequency Domain Design Richard M. Murray 17 November 28 Goals: Describe canonical control design problem and standard performance measures Show how to use loop shaping to achieve
ECE317 : Feedback and Control
 ECE317 : Feedback and Control Lecture : Steady-state error Dr. Richard Tymerski Dept. of Electrical and Computer Engineering Portland State University 1 Course roadmap Modeling Analysis Design Laplace
ECE317 : Feedback and Control Lecture : Steady-state error Dr. Richard Tymerski Dept. of Electrical and Computer Engineering Portland State University 1 Course roadmap Modeling Analysis Design Laplace
Lecture 5: Frequency domain analysis: Nyquist, Bode Diagrams, second order systems, system types
 Lecture 5: Frequency domain analysis: Nyquist, Bode Diagrams, second order systems, system types Venkata Sonti Department of Mechanical Engineering Indian Institute of Science Bangalore, India, 562 This
Lecture 5: Frequency domain analysis: Nyquist, Bode Diagrams, second order systems, system types Venkata Sonti Department of Mechanical Engineering Indian Institute of Science Bangalore, India, 562 This
Due Wednesday, February 6th EE/MFS 599 HW #5
 Due Wednesday, February 6th EE/MFS 599 HW #5 You may use Matlab/Simulink wherever applicable. Consider the standard, unity-feedback closed loop control system shown below where G(s) = /[s q (s+)(s+9)]
Due Wednesday, February 6th EE/MFS 599 HW #5 You may use Matlab/Simulink wherever applicable. Consider the standard, unity-feedback closed loop control system shown below where G(s) = /[s q (s+)(s+9)]
If you need more room, use the backs of the pages and indicate that you have done so.
 EE 343 Exam II Ahmad F. Taha Spring 206 Your Name: Your Signature: Exam duration: hour and 30 minutes. This exam is closed book, closed notes, closed laptops, closed phones, closed tablets, closed pretty
EE 343 Exam II Ahmad F. Taha Spring 206 Your Name: Your Signature: Exam duration: hour and 30 minutes. This exam is closed book, closed notes, closed laptops, closed phones, closed tablets, closed pretty
FEEDBACK CONTROL SYSTEMS
 FEEDBAC CONTROL SYSTEMS. Control System Design. Open and Closed-Loop Control Systems 3. Why Closed-Loop Control? 4. Case Study --- Speed Control of a DC Motor 5. Steady-State Errors in Unity Feedback Control
FEEDBAC CONTROL SYSTEMS. Control System Design. Open and Closed-Loop Control Systems 3. Why Closed-Loop Control? 4. Case Study --- Speed Control of a DC Motor 5. Steady-State Errors in Unity Feedback Control
1 x(k +1)=(Φ LH) x(k) = T 1 x 2 (k) x1 (0) 1 T x 2(0) T x 1 (0) x 2 (0) x(1) = x(2) = x(3) =
=(Φ LH) x(k) = T 1 x 2 (k) x1 (0) 1 T x 2(0) T x 1 (0) x 2 (0) x(1) = x(2) = x(3) =") 567 This is often referred to as Þnite settling time or deadbeat design because the dynamics will settle in a Þnite number of sample periods. This estimator always drives the error to zero in time 2T or
567 This is often referred to as Þnite settling time or deadbeat design because the dynamics will settle in a Þnite number of sample periods. This estimator always drives the error to zero in time 2T or
AMME3500: System Dynamics & Control
 Stefan B. Williams May, 211 AMME35: System Dynamics & Control Assignment 4 Note: This assignment contributes 15% towards your final mark. This assignment is due at 4pm on Monday, May 3 th during Week 13
Stefan B. Williams May, 211 AMME35: System Dynamics & Control Assignment 4 Note: This assignment contributes 15% towards your final mark. This assignment is due at 4pm on Monday, May 3 th during Week 13
Topic # Feedback Control
 Topic #4 16.31 Feedback Control Stability in the Frequency Domain Nyquist Stability Theorem Examples Appendix (details) This is the basis of future robustness tests. Fall 2007 16.31 4 2 Frequency Stability
Topic #4 16.31 Feedback Control Stability in the Frequency Domain Nyquist Stability Theorem Examples Appendix (details) This is the basis of future robustness tests. Fall 2007 16.31 4 2 Frequency Stability
Module 3F2: Systems and Control EXAMPLES PAPER 2 ROOT-LOCUS. Solutions
 Cambridge University Engineering Dept. Third Year Module 3F: Systems and Control EXAMPLES PAPER ROOT-LOCUS Solutions. (a) For the system L(s) = (s + a)(s + b) (a, b both real) show that the root-locus
Cambridge University Engineering Dept. Third Year Module 3F: Systems and Control EXAMPLES PAPER ROOT-LOCUS Solutions. (a) For the system L(s) = (s + a)(s + b) (a, b both real) show that the root-locus
1 An Overview and Brief History of Feedback Control 1. 2 Dynamic Models 23. Contents. Preface. xiii
 Contents 1 An Overview and Brief History of Feedback Control 1 A Perspective on Feedback Control 1 Chapter Overview 2 1.1 A Simple Feedback System 3 1.2 A First Analysis of Feedback 6 1.3 Feedback System
Contents 1 An Overview and Brief History of Feedback Control 1 A Perspective on Feedback Control 1 Chapter Overview 2 1.1 A Simple Feedback System 3 1.2 A First Analysis of Feedback 6 1.3 Feedback System
Proportional plus Integral (PI) Controller
 Controller") Proportional plus Integral (PI) Controller 1. A pole is placed at the origin 2. This causes the system type to increase by 1 and as a result the error is reduced to zero. 3. Originally a point A is on
Proportional plus Integral (PI) Controller 1. A pole is placed at the origin 2. This causes the system type to increase by 1 and as a result the error is reduced to zero. 3. Originally a point A is on
(Continued on next page)
") (Continued on next page) 18.2 Roots of Stability Nyquist Criterion 87 e(s) 1 S(s) = =, r(s) 1 + P (s)c(s) where P (s) represents the plant transfer function, and C(s) the compensator. The closedloop characteristic
(Continued on next page) 18.2 Roots of Stability Nyquist Criterion 87 e(s) 1 S(s) = =, r(s) 1 + P (s)c(s) where P (s) represents the plant transfer function, and C(s) the compensator. The closedloop characteristic
Course roadmap. Step response for 2nd-order system. Step response for 2nd-order system
 ME45: Control Systems Lecture Time response of nd-order systems Prof. Clar Radcliffe and Prof. Jongeun Choi Department of Mechanical Engineering Michigan State University Modeling Laplace transform Transfer
ME45: Control Systems Lecture Time response of nd-order systems Prof. Clar Radcliffe and Prof. Jongeun Choi Department of Mechanical Engineering Michigan State University Modeling Laplace transform Transfer
Root Locus Design Example #3
 Root Locus Design Example #3 A. Introduction The system represents a linear model for vertical motion of an underwater vehicle at zero forward speed. The vehicle is assumed to have zero pitch and roll
Root Locus Design Example #3 A. Introduction The system represents a linear model for vertical motion of an underwater vehicle at zero forward speed. The vehicle is assumed to have zero pitch and roll
Digital Control: Summary # 7
 Digital Control: Summary # 7 Proportional, integral and derivative control where K i is controller parameter (gain). It defines the ratio of the control change to the control error. Note that e(k) 0 u(k)
Digital Control: Summary # 7 Proportional, integral and derivative control where K i is controller parameter (gain). It defines the ratio of the control change to the control error. Note that e(k) 0 u(k)
Data Based Design of 3Term Controllers. Data Based Design of 3 Term Controllers p. 1/10
 Data Based Design of 3Term Controllers Data Based Design of 3 Term Controllers p. 1/10 Data Based Design of 3 Term Controllers p. 2/10 History Classical Control - single controller (PID, lead/lag) is designed
Data Based Design of 3Term Controllers Data Based Design of 3 Term Controllers p. 1/10 Data Based Design of 3 Term Controllers p. 2/10 History Classical Control - single controller (PID, lead/lag) is designed
Richiami di Controlli Automatici
 Richiami di Controlli Automatici Gianmaria De Tommasi 1 1 Università degli Studi di Napoli Federico II detommas@unina.it Ottobre 2012 Corsi AnsaldoBreda G. De Tommasi (UNINA) Richiami di Controlli Automatici
Richiami di Controlli Automatici Gianmaria De Tommasi 1 1 Università degli Studi di Napoli Federico II detommas@unina.it Ottobre 2012 Corsi AnsaldoBreda G. De Tommasi (UNINA) Richiami di Controlli Automatici
FEL3210 Multivariable Feedback Control
 FEL3210 Multivariable Feedback Control Lecture 5: Uncertainty and Robustness in SISO Systems [Ch.7-(8)] Elling W. Jacobsen, Automatic Control Lab, KTH Lecture 5:Uncertainty and Robustness () FEL3210 MIMO
FEL3210 Multivariable Feedback Control Lecture 5: Uncertainty and Robustness in SISO Systems [Ch.7-(8)] Elling W. Jacobsen, Automatic Control Lab, KTH Lecture 5:Uncertainty and Robustness () FEL3210 MIMO
100 (s + 10) (s + 100) e 0.5s. s 100 (s + 10) (s + 100). G(s) =
 (s + 100) e 0.5s. s 100 (s + 10) (s + 100). G(s) =") 1 AME 3315; Spring 215; Midterm 2 Review (not graded) Problems: 9.3 9.8 9.9 9.12 except parts 5 and 6. 9.13 except parts 4 and 5 9.28 9.34 You are given the transfer function: G(s) = 1) Plot the bode plot
1 AME 3315; Spring 215; Midterm 2 Review (not graded) Problems: 9.3 9.8 9.9 9.12 except parts 5 and 6. 9.13 except parts 4 and 5 9.28 9.34 You are given the transfer function: G(s) = 1) Plot the bode plot
STABILITY OF CLOSED-LOOP CONTOL SYSTEMS
 CHBE320 LECTURE X STABILITY OF CLOSED-LOOP CONTOL SYSTEMS Professor Dae Ryook Yang Spring 2018 Dept. of Chemical and Biological Engineering 10-1 Road Map of the Lecture X Stability of closed-loop control
CHBE320 LECTURE X STABILITY OF CLOSED-LOOP CONTOL SYSTEMS Professor Dae Ryook Yang Spring 2018 Dept. of Chemical and Biological Engineering 10-1 Road Map of the Lecture X Stability of closed-loop control
R a) Compare open loop and closed loop control systems. b) Clearly bring out, from basics, Force-current and Force-Voltage analogies.
 Compare open loop and closed loop control systems. b) Clearly bring out, from basics, Force-current and Force-Voltage analogies.") SET - 1 II B. Tech II Semester Supplementary Examinations Dec 01 1. a) Compare open loop and closed loop control systems. b) Clearly bring out, from basics, Force-current and Force-Voltage analogies..
SET - 1 II B. Tech II Semester Supplementary Examinations Dec 01 1. a) Compare open loop and closed loop control systems. b) Clearly bring out, from basics, Force-current and Force-Voltage analogies..
Control for. Maarten Steinbuch Dept. Mechanical Engineering Control Systems Technology Group TU/e
 Control for Maarten Steinbuch Dept. Mechanical Engineering Control Systems Technology Group TU/e Motion Systems m F Introduction Timedomain tuning Frequency domain & stability Filters Feedforward Servo-oriented
Control for Maarten Steinbuch Dept. Mechanical Engineering Control Systems Technology Group TU/e Motion Systems m F Introduction Timedomain tuning Frequency domain & stability Filters Feedforward Servo-oriented
CDS 101/110: Lecture 10.3 Final Exam Review
 CDS 11/11: Lecture 1.3 Final Exam Review December 2, 216 Schedule: (1) Posted on the web Monday, Dec. 5 by noon. (2) Due Friday, Dec. 9, at 5: pm. (3) Determines 3% of your grade Instructions on Front
CDS 11/11: Lecture 1.3 Final Exam Review December 2, 216 Schedule: (1) Posted on the web Monday, Dec. 5 by noon. (2) Due Friday, Dec. 9, at 5: pm. (3) Determines 3% of your grade Instructions on Front
LABORATORY INSTRUCTION MANUAL CONTROL SYSTEM I LAB EE 593
 LABORATORY INSTRUCTION MANUAL CONTROL SYSTEM I LAB EE 593 ELECTRICAL ENGINEERING DEPARTMENT JIS COLLEGE OF ENGINEERING (AN AUTONOMOUS INSTITUTE) KALYANI, NADIA CONTROL SYSTEM I LAB. MANUAL EE 593 EXPERIMENT
LABORATORY INSTRUCTION MANUAL CONTROL SYSTEM I LAB EE 593 ELECTRICAL ENGINEERING DEPARTMENT JIS COLLEGE OF ENGINEERING (AN AUTONOMOUS INSTITUTE) KALYANI, NADIA CONTROL SYSTEM I LAB. MANUAL EE 593 EXPERIMENT
MAE 143B - Homework 9
 MAE 143B - Homework 9 7.1 a) We have stable first-order poles at p 1 = 1 and p 2 = 1. For small values of ω, we recover the DC gain K = lim ω G(jω) = 1 1 = 2dB. Having this finite limit, our straight-line
MAE 143B - Homework 9 7.1 a) We have stable first-order poles at p 1 = 1 and p 2 = 1. For small values of ω, we recover the DC gain K = lim ω G(jω) = 1 1 = 2dB. Having this finite limit, our straight-line
MASSACHUSETTS INSTITUTE OF TECHNOLOGY Department of Mechanical Engineering Dynamics and Control II Fall 2007
 MASSACHUSETTS INSTITUTE OF TECHNOLOGY Department of Mechanical Engineering.4 Dynamics and Control II Fall 7 Problem Set #9 Solution Posted: Sunday, Dec., 7. The.4 Tower system. The system parameters are
MASSACHUSETTS INSTITUTE OF TECHNOLOGY Department of Mechanical Engineering.4 Dynamics and Control II Fall 7 Problem Set #9 Solution Posted: Sunday, Dec., 7. The.4 Tower system. The system parameters are
Course Summary. The course cannot be summarized in one lecture.
 Course Summary Unit 1: Introduction Unit 2: Modeling in the Frequency Domain Unit 3: Time Response Unit 4: Block Diagram Reduction Unit 5: Stability Unit 6: Steady-State Error Unit 7: Root Locus Techniques
Course Summary Unit 1: Introduction Unit 2: Modeling in the Frequency Domain Unit 3: Time Response Unit 4: Block Diagram Reduction Unit 5: Stability Unit 6: Steady-State Error Unit 7: Root Locus Techniques
Solutions to Skill-Assessment Exercises
 Solutions to Skill-Assessment Exercises To Accompany Control Systems Engineering 4 th Edition By Norman S. Nise John Wiley & Sons Copyright 2004 by John Wiley & Sons, Inc. All rights reserved. No part
Solutions to Skill-Assessment Exercises To Accompany Control Systems Engineering 4 th Edition By Norman S. Nise John Wiley & Sons Copyright 2004 by John Wiley & Sons, Inc. All rights reserved. No part
Controller Design using Root Locus
 Chapter 4 Controller Design using Root Locus 4. PD Control Root locus is a useful tool to design different types of controllers. Below, we will illustrate the design of proportional derivative controllers
Chapter 4 Controller Design using Root Locus 4. PD Control Root locus is a useful tool to design different types of controllers. Below, we will illustrate the design of proportional derivative controllers
Delhi Noida Bhopal Hyderabad Jaipur Lucknow Indore Pune Bhubaneswar Kolkata Patna Web: Ph:
 Serial : 0. LS_D_ECIN_Control Systems_30078 Delhi Noida Bhopal Hyderabad Jaipur Lucnow Indore Pune Bhubaneswar Kolata Patna Web: E-mail: info@madeeasy.in Ph: 0-4546 CLASS TEST 08-9 ELECTRONICS ENGINEERING
Serial : 0. LS_D_ECIN_Control Systems_30078 Delhi Noida Bhopal Hyderabad Jaipur Lucnow Indore Pune Bhubaneswar Kolata Patna Web: E-mail: info@madeeasy.in Ph: 0-4546 CLASS TEST 08-9 ELECTRONICS ENGINEERING
Module 5: Design of Sampled Data Control Systems Lecture Note 8
 Module 5: Design of Sampled Data Control Systems Lecture Note 8 Lag-lead Compensator When a single lead or lag compensator cannot guarantee the specified design criteria, a laglead compensator is used.
Module 5: Design of Sampled Data Control Systems Lecture Note 8 Lag-lead Compensator When a single lead or lag compensator cannot guarantee the specified design criteria, a laglead compensator is used.
Raktim Bhattacharya. . AERO 422: Active Controls for Aerospace Vehicles. Basic Feedback Analysis & Design
 AERO 422: Active Controls for Aerospace Vehicles Basic Feedback Analysis & Design Raktim Bhattacharya Laboratory For Uncertainty Quantification Aerospace Engineering, Texas A&M University Routh s Stability
AERO 422: Active Controls for Aerospace Vehicles Basic Feedback Analysis & Design Raktim Bhattacharya Laboratory For Uncertainty Quantification Aerospace Engineering, Texas A&M University Routh s Stability